1
SYSTEMY ELEKTROENERGETYCZNE
Rozdział
7
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Łódź, 2011 rok
Andrzej Kanicki
2
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Wprowadzenie
Stabilność
globalna systemu elektroenergetycznego to stabilność
jego pracy
podczas dużych zakłóceń. Do zakłóceń
tych można zaliczyć:
9załączanie, wyłączanie wielkich odbiorów,
9załączanie, wyłączanie grup generatorów, całych elektrowni,
9załączanie, wyłączanie linii w sieci elektroenergetycznej,
9powstanie zwarcia.
Najgroźniejszym zakłóceniem jest oczywiście zwarcie, podczas którego
następuje gwałtowna redukcja pobieranej mocy czynnej z generatorów, gdy
tymczasem moc mechaniczna turbin pozostaje stała. Ta nierównowago
momentów napędowego i hamującego prowadzi do szybkiego wzrostu kątów
między wirnikami generatorów oraz ich prędkości obrotowych.
W praktyce inżynierskiej badanie równowagi dynamicznej ogranicza się
bardzo
często tylko do sprawdzenia czy równowaga jest zachowana dla pierwszego
wahnięcia wirnika.
W układach elektroenergetycznych przy pominięciu wpływu działania
regulatorów na zjawisko stabilności takie założenie jest dopuszczalne.
3
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
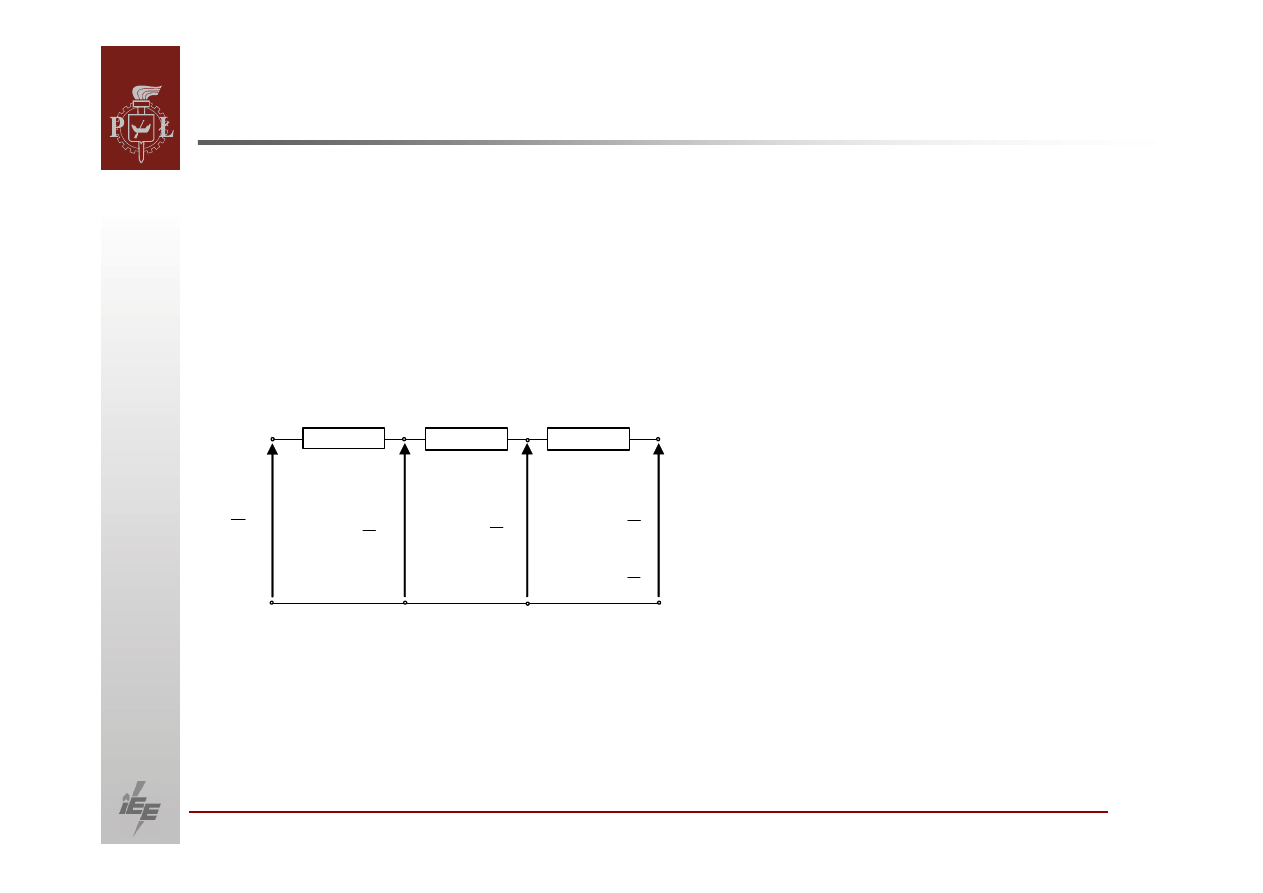
Model matematyczny generatora
W badaniach stanów ustalonych generatory są
modelowane za pomocą
reaktancji synchronicznej podłużnej, za którą
występuje siła elektromotoryczna
synchroniczna generatora.
Do badania równowagi dynamicznej przyjmuje się, że generator jest
reprezentowany przez siłę
elektromotoryczną
przejściową
za reaktancją
przejściową.
d
E
d
E
G
U
d
E′
d
E″
d
X ′′
d
d
X
X
′′
−
′
d
d
X
X
′
−
4
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
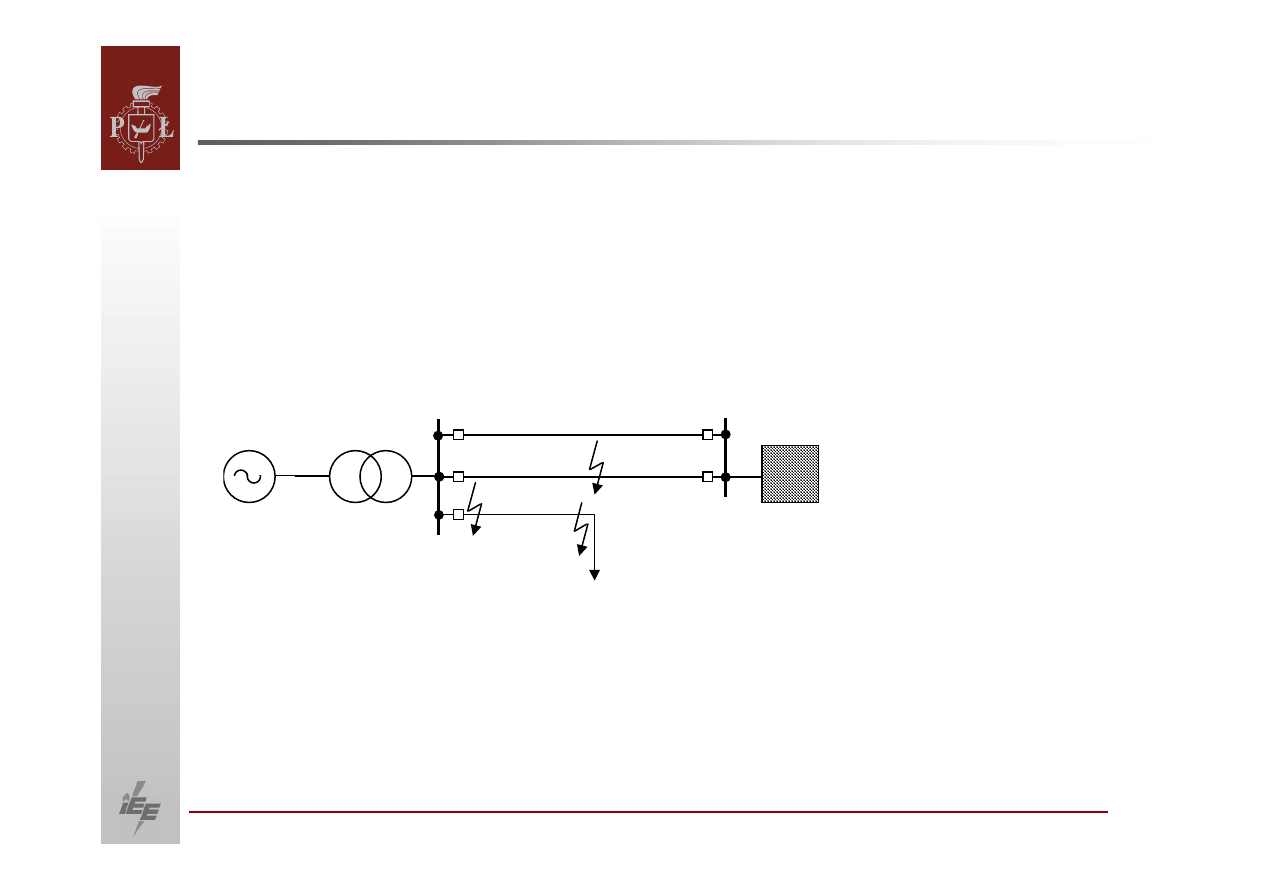
Zastosowanie metody równych powierzchni
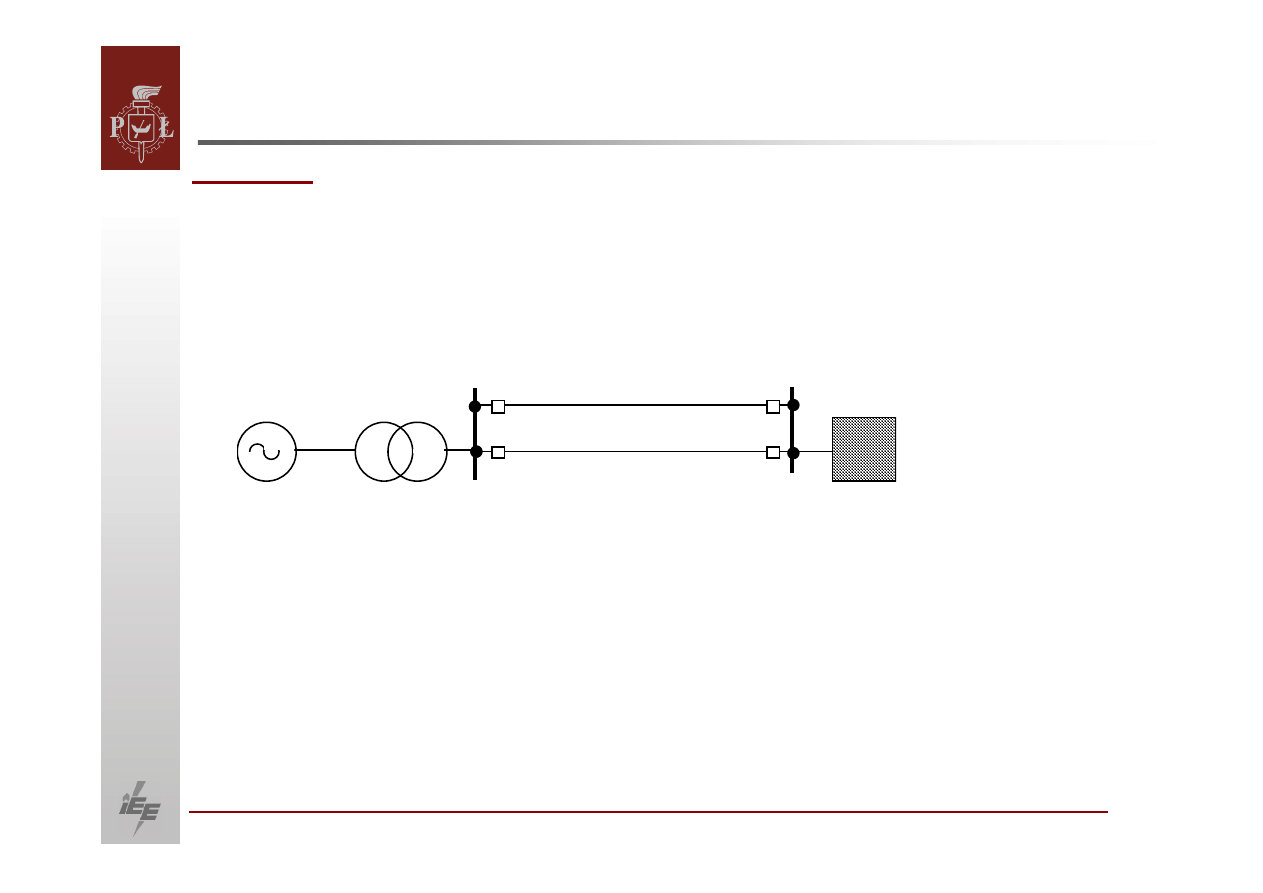
Została już
opisana metoda równych powierzchni. Metoda ta polega określeniu
powierzchni pola odpowiadającym energii kinetycznej przyspieszającej
i hamującej
na wykresie mocy w funkcji kąta pomiędzy siłą
elektromotoryczną
przejściową
a napięciem sieci sztywnej. Równowaga zostanie zachowana, jeśli
te pola mogą
być
równe sobie i
nie
zostanie zachowana, jeśli pole
przyspieszające i hamujące
nie są
sobie równe.
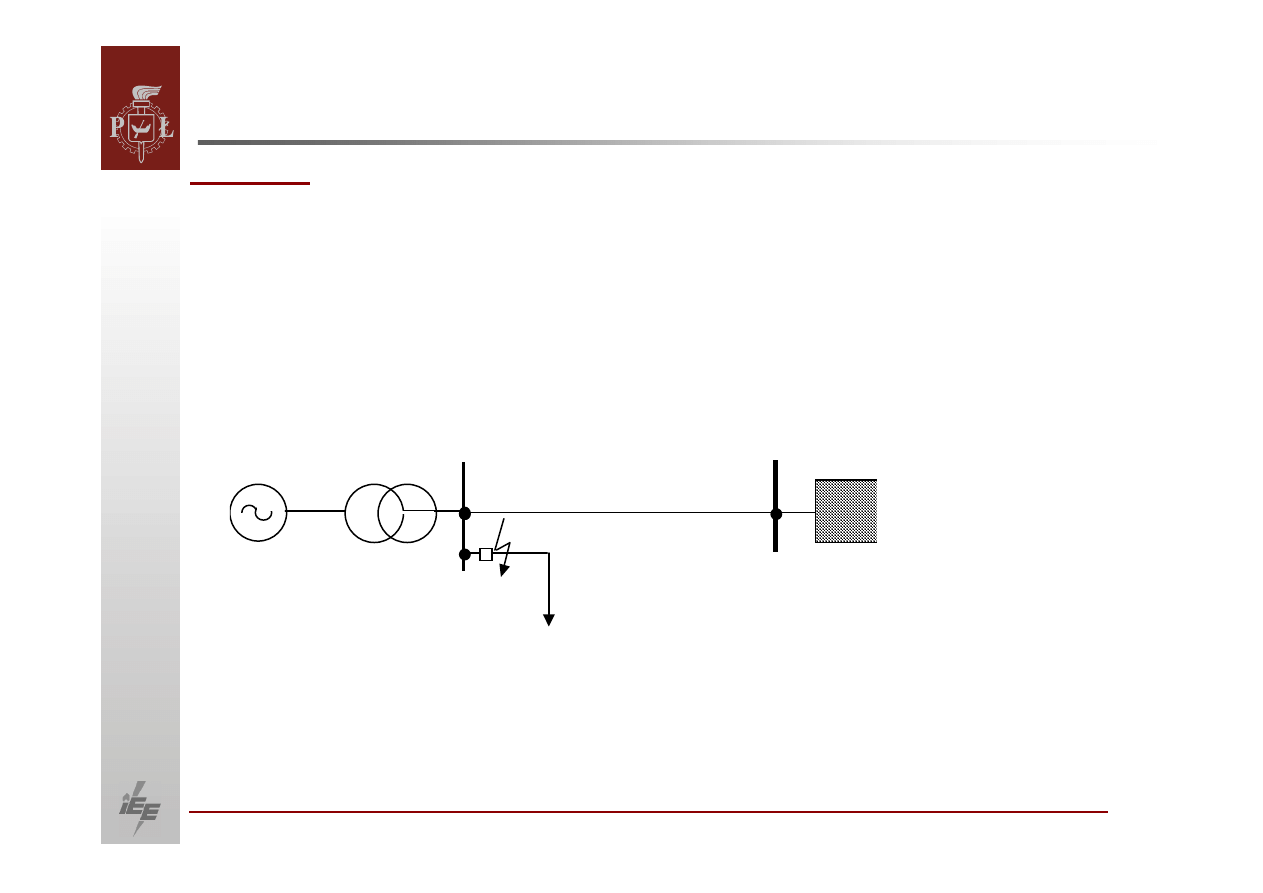
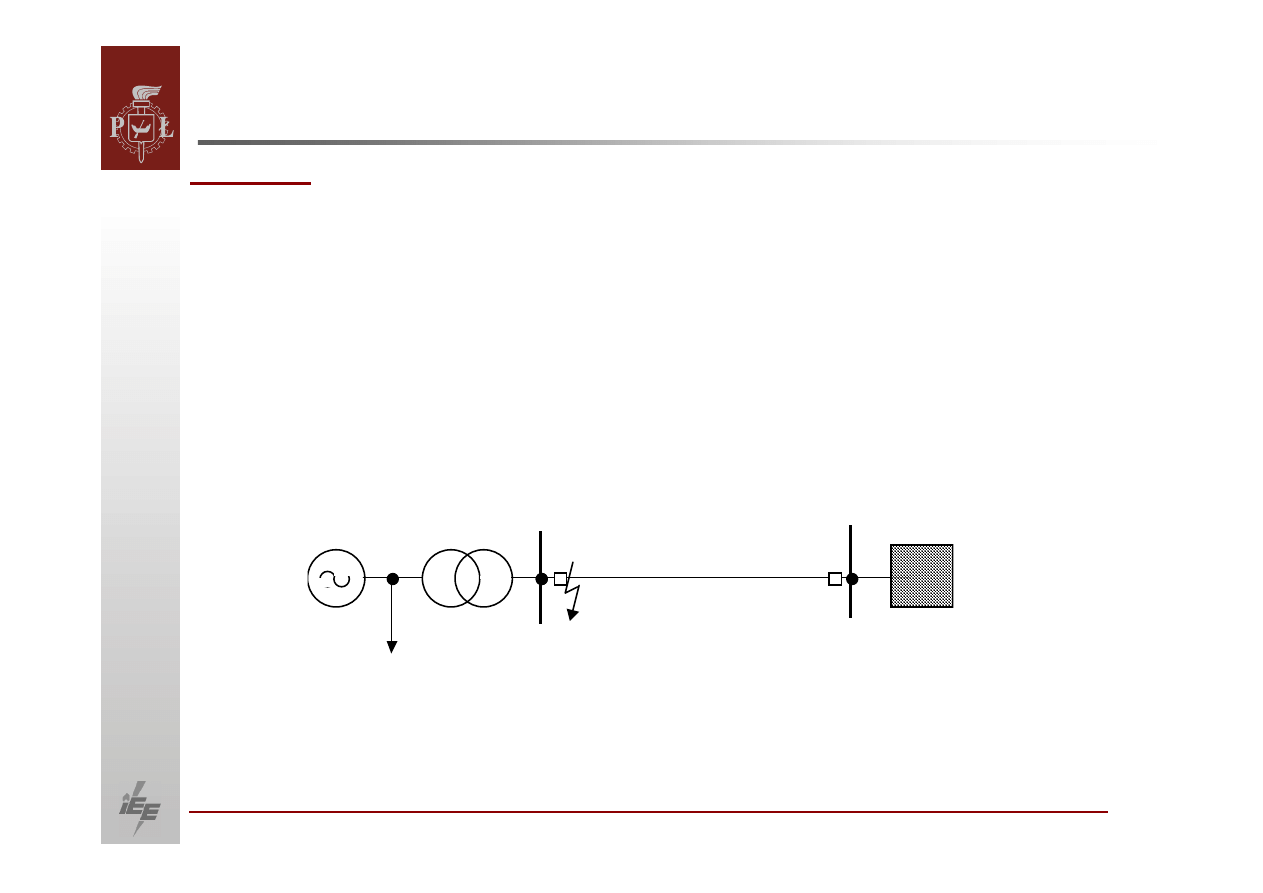
G
T
L1
A
B
220 kV
220 kV
UE
L3
L2
1
3
2
5
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
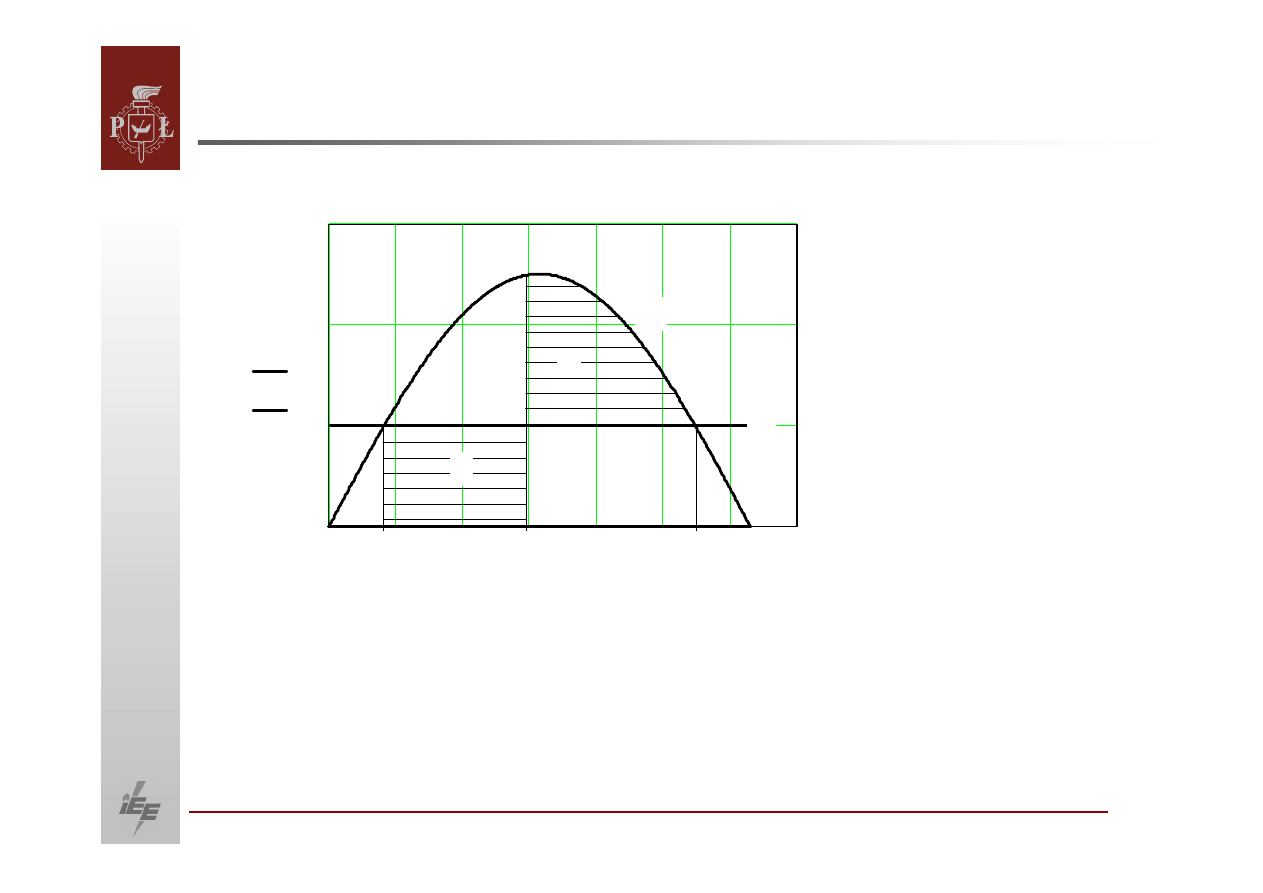
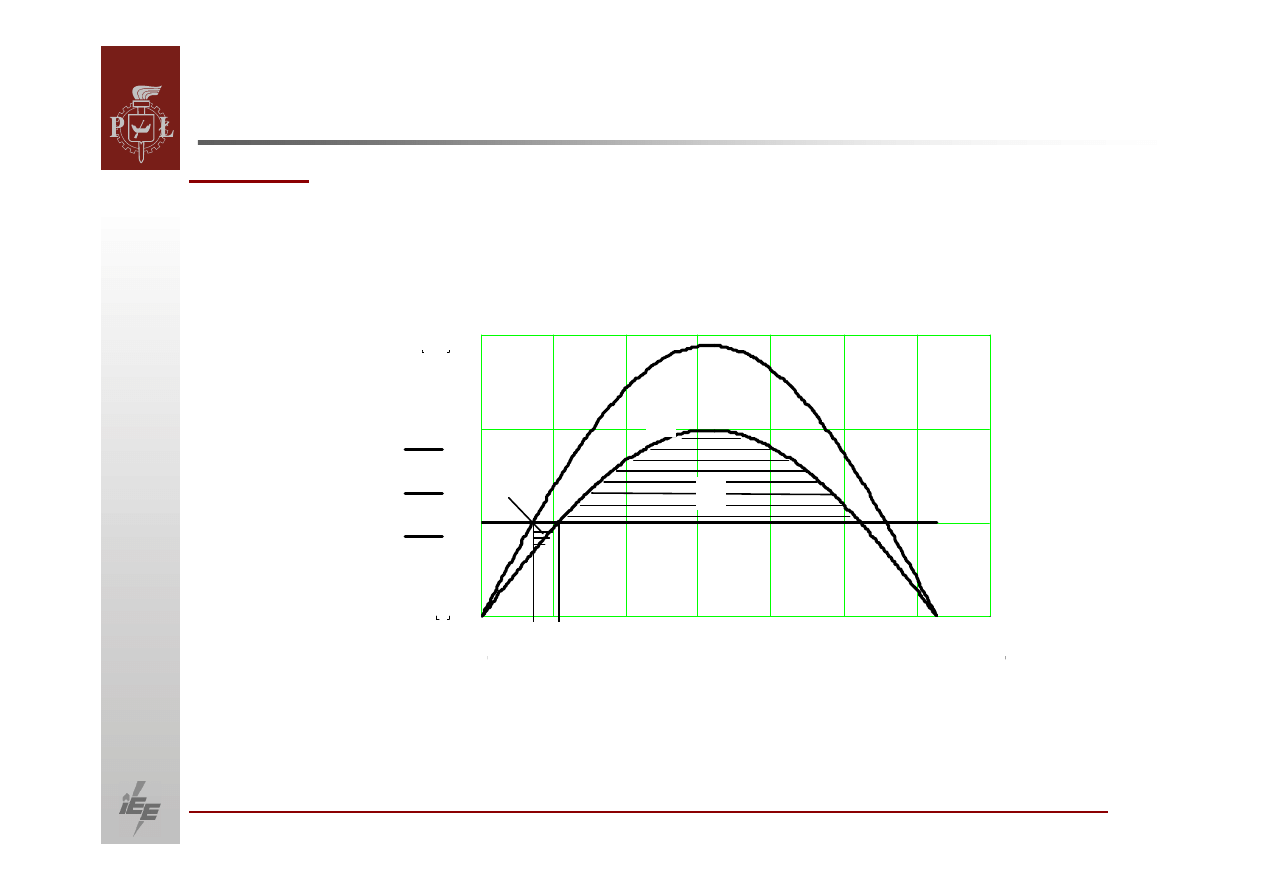
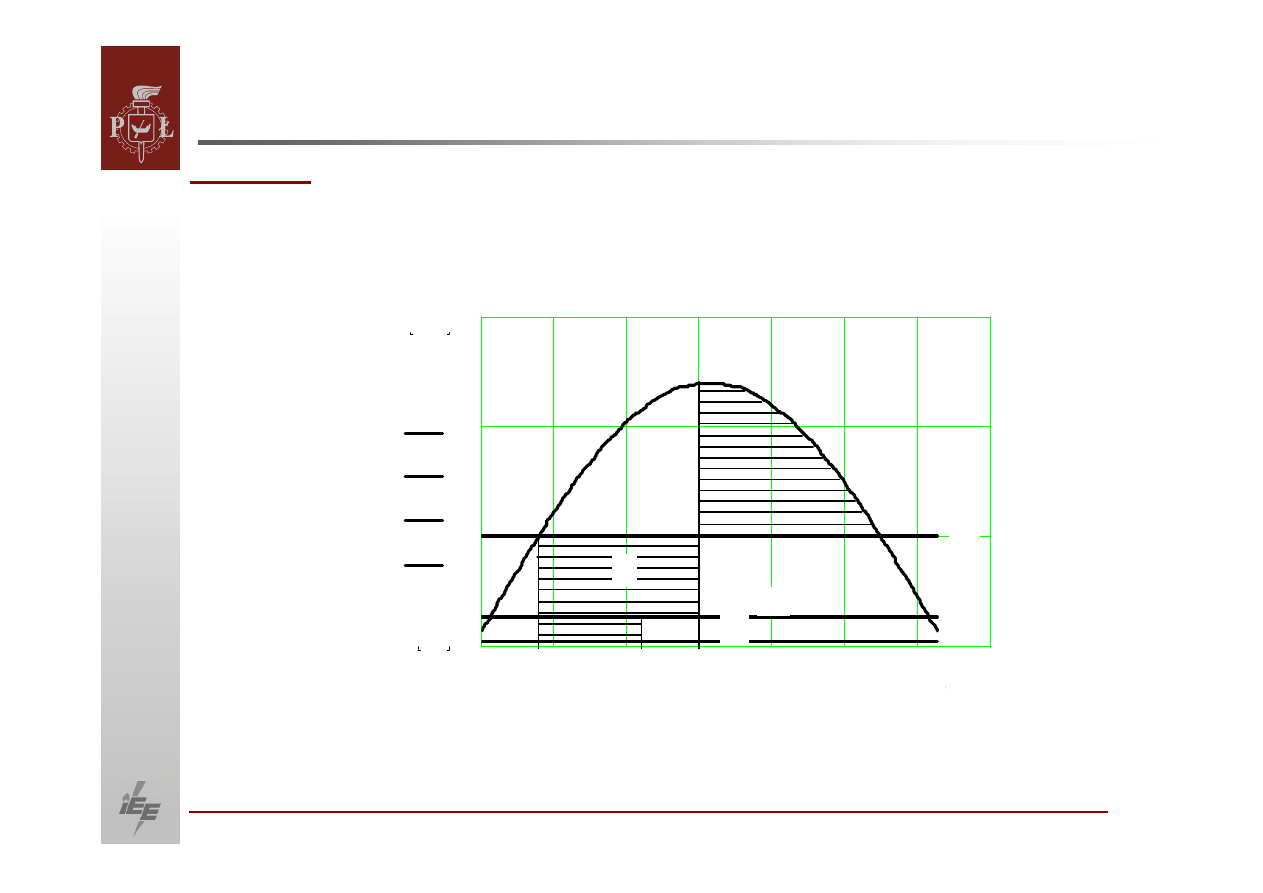
Zastosowanie metody równych powierzchni
Pola reprezentujące energie kinetyczne dla zwarcia trójfazowego w
punkcie
1
0
0.5
1
1.5
2
2.5
3
3.5
0
1
2
3
P1
i
P2
i
δ i
1
S
2
S
0
e
P
eZ
P
m
P
0
δ
′
mx
δ
′
0
δ
Π
′
−
P
A
B
δ
′
6
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Badanie stabilności dynamicznej podczas zwarć
niesymetrycznych
W miejscu zwarcia niesymetrycznego trzeba włączyć
dodatkową
sztuczną
gałąź
o impedancji zależnej od rodzaju zwarcia, i
tak
impedancja ta wynosi:
•
trójfazowe ………………….
•
dwufazowe ………………..
•
jednofazowe ………………
•
dwufazowe z ziemią
…..
0
Z
=
Δ
( )
2
Z
Z
=
Δ
( )
( )
0
2
Z
Z
Z
+
=
Δ
( )
( )
( )
( )
0
2
0
2
Z
Z
Z
Z
Z
+
=
Δ
7
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
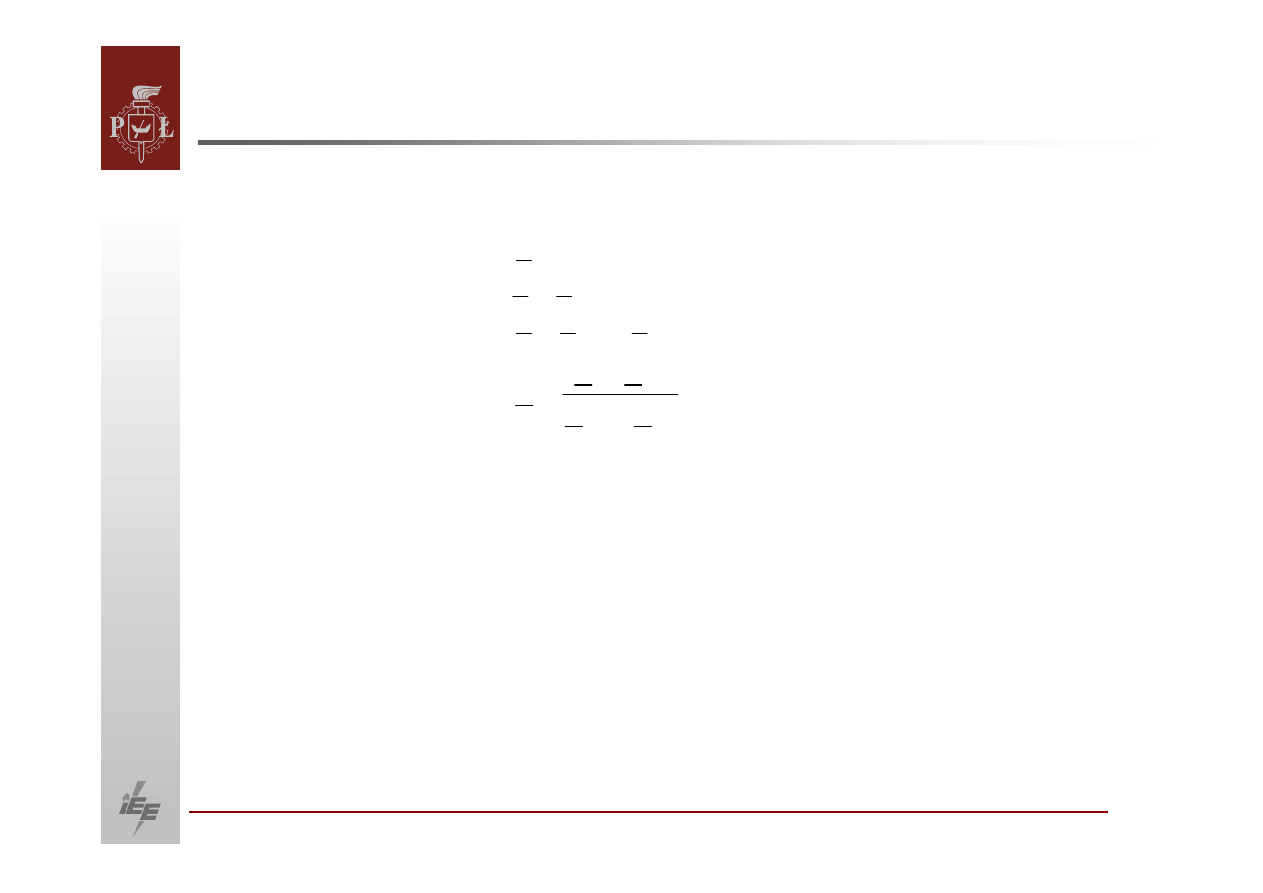
Badanie stabilności dynamicznej podczas zwarć
niesymetrycznych
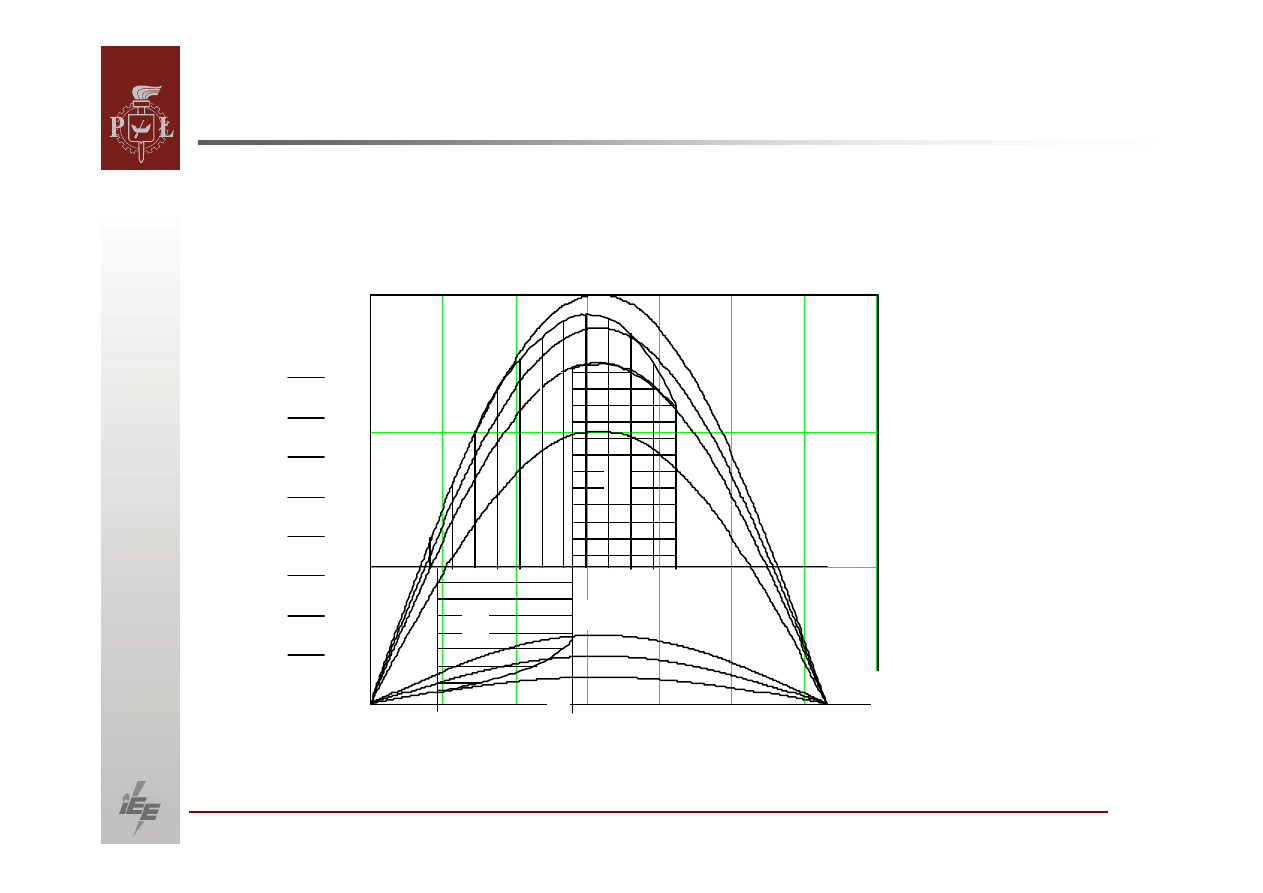
Charakterystyki mocy dla różnych rodzajów zwarć
2.5
0
P1
i
P2
i
P3
i
P4
i
P5
i
P6
i
3.14159
0
δ i.
0
0.5
1
1.5
2
2.5
3
3.5
0
1
2
3
8
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Wpływ regulacji wzbudzenia
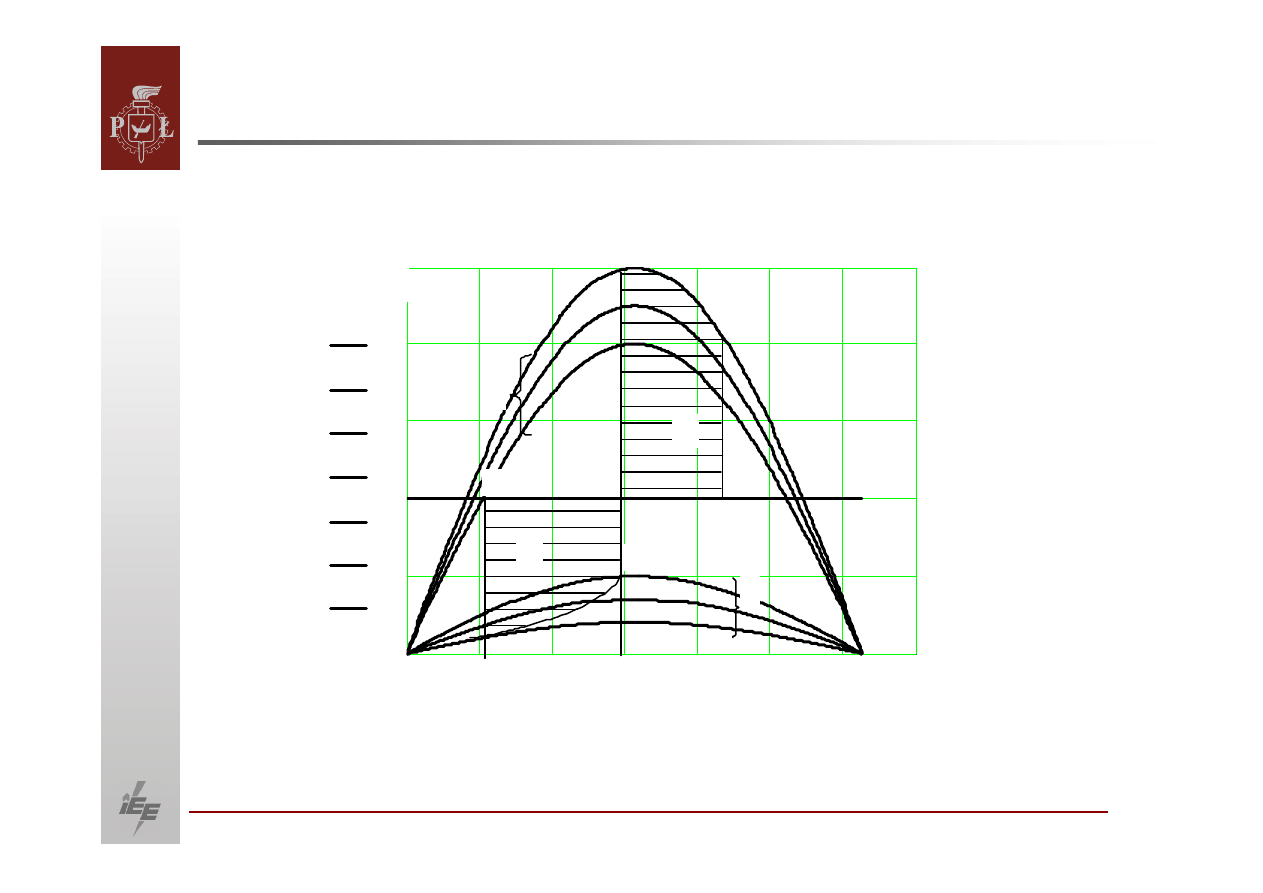
Charakterystyki mocy z uwzględnieniem
regulacji wzbudzenie generatora
P1
i
P2
i
P3
i
P4
i
P5
i
P6
i
P7
i
δ i.
0
0.5
1
1.5
2
2.5
3
3.5
0
0.5
1
1.5
2
2.5
1
P
δ’
2
S
1
5
1
2
3
4
3’
S
2
6
7
9
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
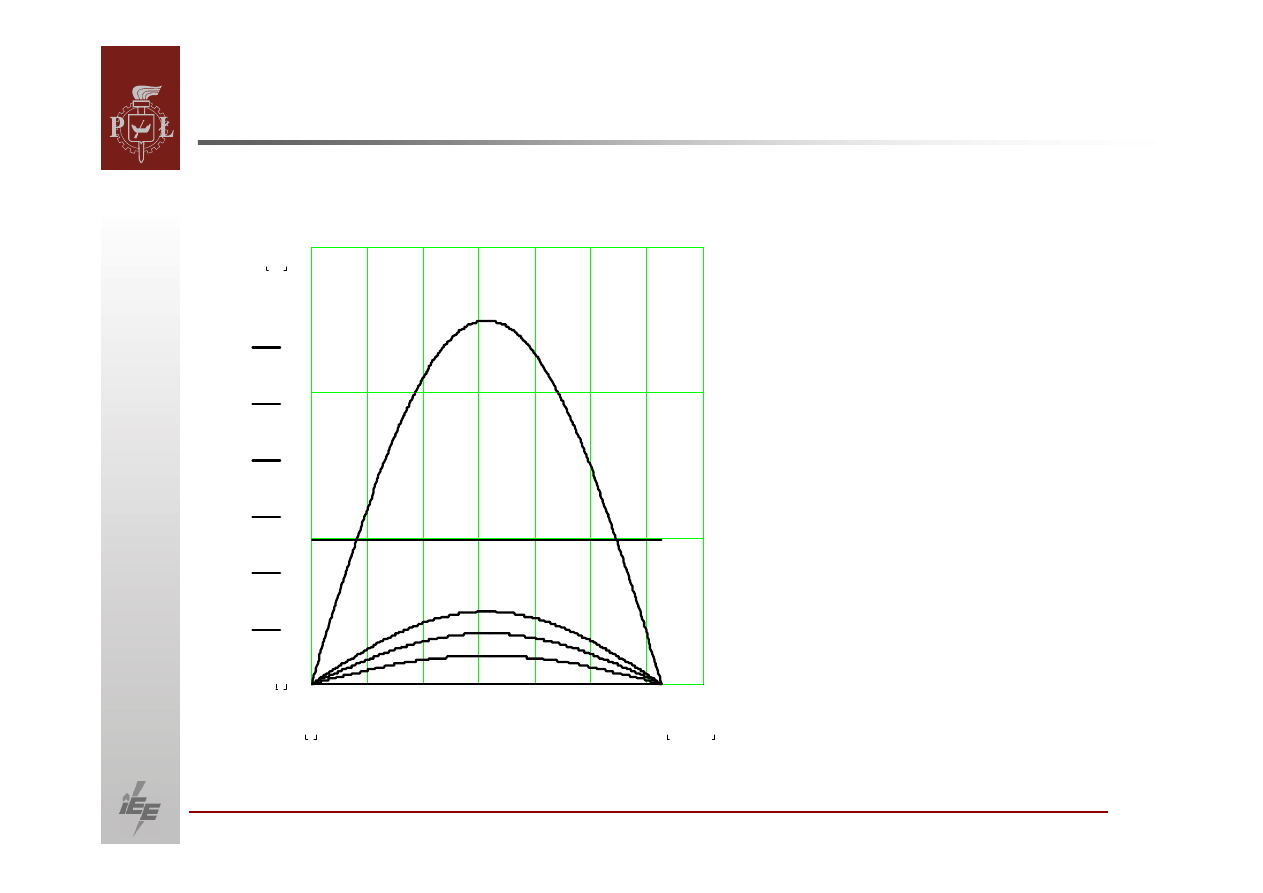
Wpływ regulacji wzbudzenia
Wahania wirnika generatora dla zwarcia w sieci o dużej
impedancji
łączącej generator z siecią
sztywną
0
0.5
1
1.5
2
2.5
3
3.5
0
1
2
3
P1
i
P2
i
P3
i
P4
i
P5
i
P6
i
P7
i
P8
i
δ i
S
3
P
δ’
1
S
1
2
3
4
5
6
7
3’
8
9
S
2
10
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Elektrownia oddaje moc czynną
przy napięciu na zaciskach
generatora . Na początku linii L2 wystąpiło zwarcie
trójfazowe. Obliczyć
największy czas dopuszczalny czas trwania zwarcia
dopuszczalny ze względu na równowagę
dynamiczną. Pominąć
rezystancje
elementów sieci.
MW
100
=
G
P
kV
10,5
=
=
NG
G
U
U
G
T
L1
A
B
220 kV
220 kV
UE
L2
11
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Dane:
G:
T:
L:
UE:
MVA
120
=
N
S
%
20
=
′
d
X
kV
5
,
10
=
N
U
ind.
8
,
0
cos
=
N
ϕ
s
5
,
12
=
m
T
MVA
150
=
N
S
%
5
,
10
=
z
U
Δ
5
,
10
220
=
T
ϑ
km
Ω
4
,
0
=
k
X
km
200
=
l
kV
220
=
B
U
12
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Impedancje elementów na poziomie napięcia 10,5 kV
Ω
184
,
0
120
5
,
10
100
20
100
2
2
=
⋅
=
⋅
′
=
N
N
d
G
S
U
X
X
Ω
077
,
0
150
5
,
10
100
5
,
10
100
2
2
=
⋅
=
⋅
=
N
N
z
T
S
U
U
X
Δ
Ω
182
,
0
220
5
,
10
200
4
,
0
1
2
2
2
=
⋅
⋅
=
⋅
⋅
=
T
k
L
l
X
X
ϑ
13
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Obliczenie kąta pomiędzy napięciem na zaciskach generatora i napięciem
sieci
sztywnej oraz mocy biernej generatora
ϑ
sin
⋅
+
⋅
=
L
T
S
G
G
X
X
U
U
P
(
)
235
,
0
5
,
10
5
,
10
259
,
0
100
sin
=
⋅
⋅
=
⋅
+
⋅
=
S
G
L
T
G
U
U
X
X
P
ϑ
(
)
o
6
,
13
235
,
0
sin
arc
=
=
ϑ
=
+
⋅
−
+
=
ϑ
cos
2
L
T
S
G
L
T
G
G
X
X
U
U
X
X
U
Q
Mvar
9
,
11
235
,
0
1
259
,
0
5
,
10
259
,
0
5
,
10
2
2
2
=
−
⋅
−
=
14
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Obliczenia modułu siły elektromotorycznej generatora
Wyznaczenie mocy granicznej równowagi układu
Obliczenie kąta początkowego
=
⋅
+
⋅
+
=
′
G
G
G
G
G
G
G
d
U
X
P
j
U
X
Q
U
E
(
)
kV
85
,
10
75
,
1
7
,
10
5
,
10
184
,
0
100
5
,
10
184
,
0
9
,
11
5
,
10
3
,
9
o
j
e
j
j
=
+
=
⋅
+
⋅
+
=
=
+
+
⋅
′
=
L
T
G
S
d
gr
X
X
X
U
E
P
MW
257
182
,
0
077
,
0
184
,
0
5
,
10
85
,
10
=
+
+
⋅
=
rad.
4
,
0
9
,
22
6
,
13
3
,
9
'
0
=
=
+
=
+
′
=
′
o
U
E
G
d
ϑ
δ
δ
15
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Wyznaczenie kąta granicznego zwarcia. Energia kinetyczna przyspieszająca
Energia kinetyczna hamująca
(
)
(
)
0
0
1
δ
δ
δ
δ
′
−
′
⋅
=
′
−
′
⋅
=
x
G
x
m
P
P
S
(
)
[
]
=
′
−
′
−
⋅
−
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
′
⋅
=
∫
′
−
′
x
m
e
P
d
P
S
x
δ
δ
Π
δ
δ
Π
δ
0
1
2
0
(
)
=
′
−
′
−
⋅
−
′
⋅
′
=
∫
′
−
′
x
G
gr
P
d
P
x
δ
δ
Π
δ
δ
δ
Π
δ
0
0
sin
(
)
(
)
x
G
x
gr
gr
P
P
P
δ
δ
Π
δ
δ
Π
′
−
′
−
⋅
−
′
⋅
+
′
−
⋅
−
=
0
0
cos
cos
16
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Wyznaczenie kąta granicznego zwarcia. Porównanie pól i obliczenie kąta
granicznego dla zwarcia.
(
)
(
)
x
G
x
gr
gr
x
G
P
P
P
P
δ
δ
Π
δ
δ
δ
δ
′
−
′
−
⋅
−
′
⋅
+
′
⋅
=
′
−
′
⋅
0
0
0
cos
cos
(
)
(
)
x
gr
gr
x
G
x
G
P
P
P
P
δ
δ
δ
δ
Π
δ
δ
′
⋅
+
′
⋅
=
′
−
′
−
⋅
+
′
−
′
⋅
cos
cos
0
0
0
(
)
x
gr
gr
G
P
P
P
δ
δ
δ
Π
′
⋅
+
′
⋅
=
′
⋅
−
⋅
cos
cos
2
0
0
(
)
(
)
010
0
9
22
257
4
0
2
100
2
0
,
,
cos
,
cos
P
P
cos
o
o
gr
G
x
−
=
−
⋅
−
⋅
=
′
−
′
⋅
−
⋅
=
′
Π
δ
δ
Π
δ
o
x
6
,
90
=
′
δ
17
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Wyznaczenie dopuszczalnego czasu trwania zwarcia. Ruch wirnika podczas
zwarcia jest opisany równaniem różniczkowym o postaci:
Równanie to można rozwiązać
analitycznie poprzez dwukrotne scałkowanie w
przedziale
( )
S
m
S
NG
m
P
t
d
d
S
T
ω
δ
ω
=
⋅
⋅
2
2
2
x
δ
δ
′
−
′
0
NG
m
S
m
x
S
T
t
P
⋅
⋅
⋅
⋅
=
′
−
′
2
2
0
ω
δ
δ
18
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 1
Z powyższego równania wyznaczamy dopuszczalny czas trwania zwarcia:
(
)
S
m
x
NG
m
P
S
T
t
ω
δ
δ
⋅
′
−
′
⋅
⋅
⋅
=
0
2
rad.
182
,
1
7
,
67
9
,
22
6
,
90
0
0
=
=
−
=
′
−
′
δ
δ
x
s
336
,
0
50
2
100
182
,
1
120
5
,
12
2
==
⋅
⋅
⋅
⋅
⋅
⋅
=
Π
t
19
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
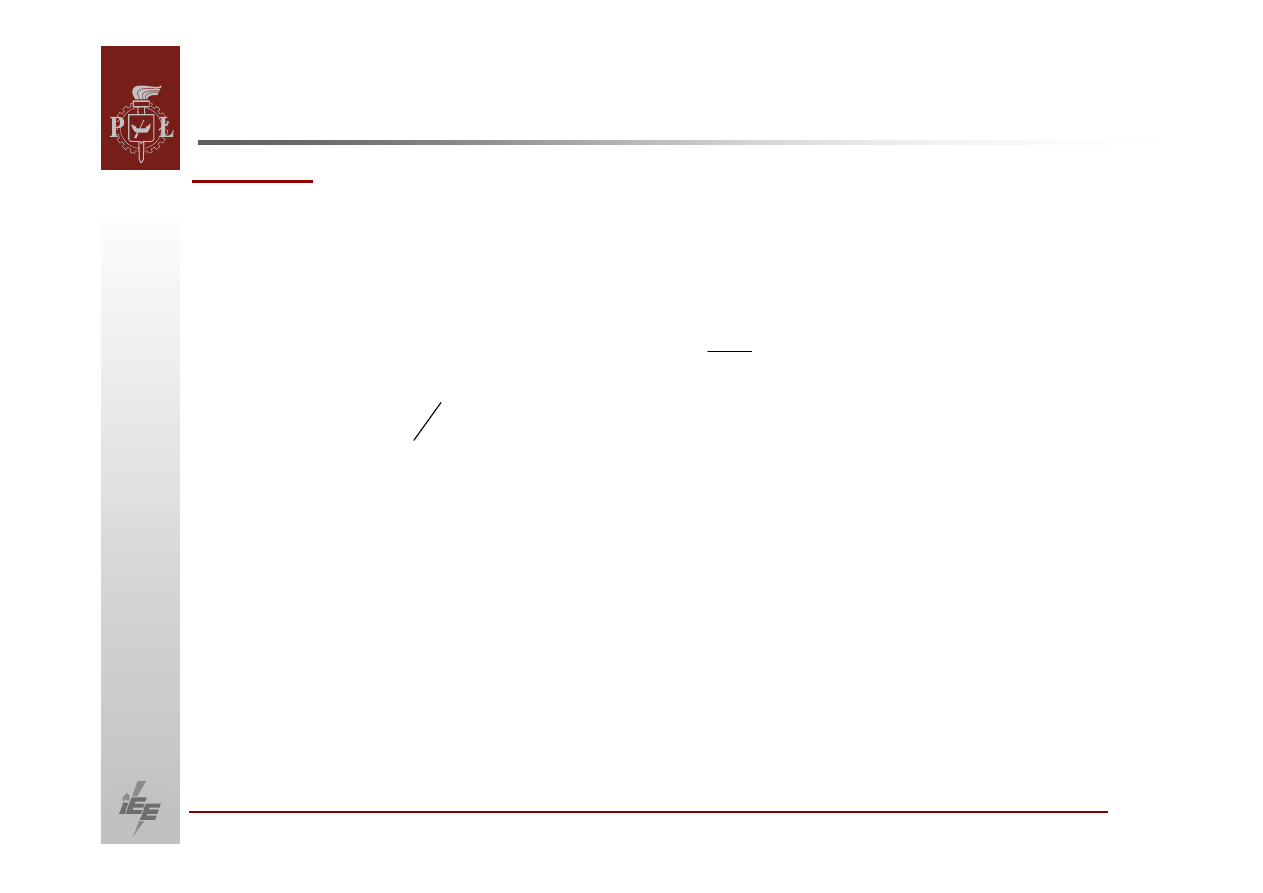
Zadanie 2
Elektrownia w układzie jak na rysunku oddaje moc czynną
przy
napięciu na zaciskach generatora .
Zbadać
równowagę
po wyłączeniu linii L1.
MW
200
=
G
P
kV
10,0
=
=
NG
G
U
U
G
T
L1
A
B
220 kV
220 kV
UE
L2
20
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Dane:
G:
T:
L1, L2:
UE:
MVA
300
=
N
S
%
20
=
′
d
X
kV
0
,
10
=
N
U
ind.
8
,
0
cos
=
N
ϕ
s
0
,
12
=
m
T
MVA
400
=
N
S
%
0
,
11
=
z
U
Δ
0
,
10
220
=
T
ϑ
km
Ω
4
,
0
=
k
X
km
200
=
l
kV
220
=
B
U
21
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Rozwiązanie
Impedancje elementów na poziomie napięcia 10 kV
Napięcie sieci sztywnej na poziomie 10 kV
Ω
0667
,
0
300
10
100
20
100
2
2
=
⋅
=
⋅
′
=
N
N
d
G
S
U
X
X
Ω
0275
,
0
400
10
100
11
100
2
2
=
⋅
=
⋅
=
N
N
z
T
S
U
U
X
Δ
Ω
166
,
0
220
10
200
4
,
0
1
2
2
2
1
=
⋅
⋅
=
⋅
⋅
=
T
k
L
l
X
X
ϑ
kV
10
220
10
220
1
10
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⋅
=
T
S
S
U
U
ϑ
22
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Obliczenie kąta pomiędzy napięciem na zaciskach generatora i napięciem
sieci
sztywnej oraz mocy biernej generatora w stanie normalnym
ϑ
sin
10
⋅
+
⋅
=
L
T
S
G
G
X
X
U
U
P
(
)
223
,
0
10
10
166
,
0
2
1
0275
,
0
200
sin
10
=
⋅
⎟
⎠
⎞
⎜
⎝
⎛
+
⋅
=
⋅
+
⋅
=
S
G
L
T
G
U
U
X
X
P
ϑ
(
)
o
9
,
12
223
,
0
sin
arc
=
=
ϑ
=
⋅
+
⋅
−
+
=
ϑ
cos
10
2
L
T
S
G
L
T
G
G
X
X
U
U
X
X
U
Q
Mvar
6
,
22
223
,
0
1
1115
,
0
10
1115
,
0
10
2
2
2
=
−
−
=
23
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Obliczenia modułu siły elektromotorycznej generatora
Wyznaczenie mocy granicznej równowagi układu przed wyłączeniem
=
⋅
+
⋅
+
=
′
G
G
G
G
G
G
G
d
U
X
P
j
U
X
Q
U
E
(
)
kV
3
,
10
33
,
1
2
,
10
10
0667
,
0
200
10
0667
,
0
6
,
22
10
4
,
7
o
j
e
j
j
=
+
=
⋅
+
⋅
+
=
=
⋅
+
+
⋅
′
=
′
L
T
G
S
d
gr
X
X
X
U
E
P
2
1
10
MW
578
166
,
0
2
1
0275
,
0
0667
,
0
10
3
,
10
=
⋅
+
+
⋅
=
24
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Wyznaczenie mocy granicznej równowagi układu po wyłączeniu
Obliczenie kąta początkowego
=
+
+
⋅
′
=
′′
L
T
G
S
d
gr
X
X
X
U
E
P
10
MW
396
166
,
0
0275
,
0
0667
,
0
10
3
,
10
=
+
+
⋅
=
rad.
354
,
0
3
,
20
9
,
12
4
,
7
'
0
=
=
+
=
+
′
=
′
o
U
E
G
d
ϑ
δ
δ
25
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Charakterystyki mocy
578
0
P 1
i
P 2
i
P 3
i
3.141593
0
δ i.
0
0.5
1
1.5
2
2.5
3
3.5
0
200
400
600
P′
P ′′
0
δ
′
k
δ
′
1
S
δ
′
P
2
S
26
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Obliczenie kąta końcowego
Obliczenie pola
505
,
0
396
200
sin
=
=
′′
=
′
gr
m
k
P
P
δ
(
)
rad.
529
0
3
30
505
0
sin
arc
,
,
,
o
k
=
=
=
′
δ
1
S
(
)
∫
′
′
=
′
⋅
′
⋅
′′
−
′
−
′
⋅
=
k
d
P
P
S
gr
k
m
δ
δ
δ
δ
δ
δ
0
sin
0
1
(
)
(
)
=
′
−
′
⋅
′′
−
′
−
′
⋅
=
k
gr
k
m
P
P
δ
δ
δ
δ
cos
cos
0
0
(
)
(
)
rad.
MW
30
,
5
863
,
0
938
,
0
396
354
,
0
529
,
0
200
=
−
⋅
−
−
⋅
=
27
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 2
Obliczenie pola
Ponieważ
– równowaga będzie zachowana.
2
S
(
)
(
)
∫
′
−
′
=
′
−
′
−
⋅
−
′
⋅
′
⋅
′′
=
k
k
k
k
m
gr
P
d
P
S
δ
Π
δ
δ
δ
Π
δ
δ
sin
2
(
)
(
)
(
)
=
′
−
′
−
⋅
−
′
−
−
′
⋅
′′
=
k
k
m
k
k
gr
P
P
δ
δ
Π
δ
Π
δ
cos
cos
(
)
(
)
rad.
MW
8
.
266
529
,
0
529
,
0
200
836
,
0
863
,
0
396
=
−
−
⋅
−
+
⋅
=
Π
2
1
S
S
<
28
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Elektrownia w układzie jak na rysunku oddaje moc czynną
przy
napięciu na zaciskach generatora , przy czym odbiór pobiera
50 MW przy . Na początku linii powstaje zwarcie trójfazowe
wyłączone po czasie 0,2
s. Linia jest wyposażona w automatykę
SPZ
z
czasem
przerwy beznapięciowej równym 0,25
s. Zbadać
równowagę
układu przy
założeniu udanej operacji SPZ. Odbiór zamodelować
stałą
impedancją.
MW
200
=
G
P
kV
10,0
=
=
NG
G
U
U
ind.
8
,
0
cos
=
ϕ
G
T
L1
A
B
220 kV
220 kV
UE
odbiór
29
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Dane:
G:
T:
L1:
UE:
MVA
300
=
N
S
%
20
=
′
d
X
kV
0
,
10
=
N
U
ind.
8
,
0
cos
=
N
ϕ
s
0
,
12
=
m
T
MVA
300
=
N
S
%
0
,
11
=
z
U
Δ
0
,
10
220
=
T
ϑ
km
Ω
4
,
0
=
k
X
km
150
=
l
kV
220
=
B
U
30
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Rozwiązanie
Impedancje elementów na poziomie napięcia 10 kV
Napięcie sieci sztywnej na poziomie 10 kV
Ω
0667
,
0
300
10
100
20
100
2
2
=
⋅
=
⋅
′
=
N
N
d
G
S
U
X
X
Ω
0367
,
0
300
10
100
11
100
2
2
=
⋅
=
⋅
=
N
N
z
T
S
U
U
X
Δ
Ω
124
,
0
220
10
150
4
,
0
1
2
2
2
1
=
⋅
⋅
=
⋅
⋅
=
T
k
L
l
X
X
ϑ
kV
10
220
10
220
1
10
=
⎟
⎠
⎞
⎜
⎝
⎛
⋅
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⋅
=
T
S
S
U
U
ϑ
31
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Obliczenie kąta pomiędzy napięciem na zaciskach generatora i napięciem
sieci
sztywnej oraz mocy biernej generatora w stanie normalnym
MW
150
50
200
=
−
=
−
=
o
G
L
P
P
P
ϑ
sin
10
⋅
+
⋅
=
L
T
S
G
L
X
X
U
U
P
(
)
(
)
241
,
0
10
10
124
,
0
0367
,
0
150
sin
10
=
⋅
+
⋅
=
⋅
+
⋅
=
S
G
L
T
L
U
U
X
X
P
ϑ
(
)
o
9
,
13
241
,
0
sin
arc
=
=
ϑ
=
⋅
+
⋅
−
+
=
ϑ
cos
10
2
L
T
S
G
L
T
G
L
X
X
U
U
X
X
U
Q
Mvar
3
,
18
241
,
0
1
161
,
0
10
161
,
0
10
2
2
2
=
−
−
=
32
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Obliczenia modułu siły elektromotorycznej generatora
Obliczenie kąta początkowego
Mvar
5
37
8
0
6
0
50
,
,
,
cos
sin
P
Q
o
o
o
o
=
⋅
=
⋅
=
ϕ
ϕ
Mvar
8
,
55
5
,
37
3
,
18
=
+
=
+
=
o
L
G
Q
Q
Q
=
⋅
+
⋅
+
=
′
G
G
G
G
G
G
G
d
U
X
P
j
U
X
Q
U
E
(
)
kV
5
10
33
1
4
10
10
0667
0
200
10
0667
0
8
55
10
3
7
o
,
j
e
,
,
j
,
,
j
,
,
=
+
=
⋅
+
⋅
+
=
rad.
370
,
0
2
,
21
9
,
13
3
,
7
'
0
=
=
+
=
+
′
=
′
o
U
E
G
d
ϑ
δ
δ
33
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Zastąpienie odbioru impedancją
Obliczenie impedancji wzajemnej generator – sieć
sztywna dla układu przed
zwarciem
W celu obliczenia impedancji wzajemnej generator 1 – sieć
sztywna musimy
przekształcić
gwiazdę
złożoną
z impedancji: , oraz
występującą
w schemacie zastępczym na trójkąt.
(
)
Ω
96
,
0
28
,
1
5
,
37
50
10
2
*
1
2
1
j
j
S
U
Z
G
o
+
=
−
=
=
G
X
j
1
o
Z
(
)
L
T
X
X
j
+
(
)
(
)
=
+
⋅
+
+
+
=
1
12
o
L
T
G
L
T
G
Z
X
X
j
X
j
X
X
j
X
j
Z
(
)
(
)
=
+
+
⋅
+
+
+
=
96
,
0
28
,
1
124
,
0
0367
,
0
0667
,
0
124
,
0
0367
,
0
0667
,
0
j
j
j
j
j
(
)
Ω
2315
,
0
231
,
0
0054
,
0
3
,
91
o
j
e
j
=
+
−
=
34
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Obliczenie impedancji własnej generatora dla układu przed zwarciem
Obliczenie impedancji wzajemnej generator – sieć
sztywna dla układu podczas
zwarcia
Zwarcie występuje na drodze generator – sieć
sztywna to .
(
)
(
)
=
+
+
⋅
+
+
=
1
1
11
o
L
T
o
L
T
G
Z
X
X
j
Z
X
X
j
X
j
Z
(
) (
)
(
) (
)
=
+
+
+
+
⋅
+
+
=
96
,
0
28
,
1
124
,
0
0367
,
0
96
,
0
28
,
1
124
,
0
0367
,
0
0667
,
0
j
j
j
j
j
(
)
Ω
2177
,
0
2174
,
0
00114
,
0
0
,
87
o
j
e
j
=
+
=
∞
=
z
Z
12
35
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Obliczenie impedancji własnej generatora dla układu podczas zwarcia
Obliczenie impedancji wzajemnej generator – sieć
sztywna dla układu
z wyłączoną
linią
Przerwa występuje na drodze generator – sieć
sztywna to .
=
+
⋅
+
=
1
1
11
o
T
o
T
G
z
Z
X
j
Z
X
j
X
j
Z
(
)
(
)
=
+
+
+
⋅
+
=
96
,
0
28
,
1
0367
,
0
96
,
0
28
,
1
0367
,
0
0667
,
0
j
j
j
j
j
(
)
Ω
1029
,
0
1029
,
0
00066
,
0
6
,
89
o
j
e
j
=
+
=
∞
=
o
Z
12
36
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Obliczenie impedancji własnej generatora dla układu z wyłączoną
linią
Wyznaczenie charakterystyki mocy układu przed zwarciem
Ponieważ
to pomijamy tę
wielkość. Wtedy mamy:
=
+
+
=
+
=
96
,
0
28
,
1
0667
,
0
1
11
j
j
Z
X
j
Z
o
G
o
(
)
Ω
641
,
1
027
,
1
28
,
1
7
,
38
o
j
e
j
=
+
=
( )
(
)
12
12
12
10
11
11
2
sin
sin
α
δ
α
−
′
⋅
⋅
′
+
⋅
′
=
′
Z
U
E
Z
E
P
S
d
d
o
3
,
1
12
=
α
( )
=
′
⋅
⋅
′
+
⋅
′
=
′
12
12
10
11
11
2
sin
sin
δ
α
Z
U
E
Z
E
P
S
d
d
MW
sin
454
5
,
26
sin
2315
,
0
10
5
,
10
3
sin
2177
,
0
5
,
10
12
12
2
δ
δ
′
⋅
+
=
′
⋅
⋅
+
⋅
=
o
37
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Wyznaczenie charakterystyki mocy układu podczas zwarcia
Wyznaczenie charakterystyki mocy układu z wyłączoną
linią
( )
MW
48
,
7
4
,
0
sin
1029
,
0
5
,
10
sin
2
11
11
2
=
⋅
=
⋅
′
=
′′
o
z
z
d
Z
E
P
α
( )
MW
4
,
52
7
,
38
sin
641
,
1
5
,
10
sin
2
11
11
2
=
⋅
=
⋅
′
=
′′′
o
o
o
d
Z
E
P
α
38
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Charakterystyki mocy
480.5
7.48
P 1
i
P 2
i
P 3
i
P 4i
3.141593
0
δ i.
0
0.5
1
1.5
2
2.5
3
3.5
0
200
400
600
P′
P ′′
P ′′′
m
P
P
δ
′
0
δ
′
1
δ
′
x
δ
′
1
S
2
S
39
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Wyznaczenie kąta
Wyznaczenie kąta
W celu wyznaczenia tego kąta założymy, że wyznaczymy maksymalną
jego
wartość
korzystając z metody równych pól.
1
δ
′
NG
m
S
G
S
T
t
P
⋅
⋅
⋅
⋅
=
′
−
′
2
2
0
1
ω
δ
δ
(
)
(
)
=
⋅
⋅
⋅
⋅
⋅
⋅
−
+
=
⋅
⋅
⋅
⋅
′′
−
+
′
=
′
300
12
2
2
,
0
50
2
48
,
7
200
37
,
0
2
2
2
0
1
Π
ω
δ
δ
NG
m
S
G
S
T
t
P
P
o
5
.
40
rad.
706
,
0
=
=
x
δ
′
(
) (
) (
) (
)
=
′
−
′
⋅
′′′
−
+
′
−
′
⋅
′′
−
=
1
0
1
1
δ
δ
δ
δ
x
G
G
P
P
P
P
S
(
) (
) (
) (
)
=
−
′
⋅
−
+
−
⋅
−
=
706
,
0
4
,
52
200
37
,
0
706
,
0
48
,
7
200
x
δ
x
δ
′
⋅
+
−
=
6
,
147
51
,
39
40
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Przyjmując, że mamy:
Równanie powyższe można rozwiązać
metodą
iteracyjną. W wyniku jej
zastosowania mamy, że:
(
)
(
)
=
′
−
′
−
⋅
−
′
⋅
′
⋅
+
=
∫
′
−
′
x
G
P
d
S
x
δ
δ
Π
δ
δ
δ
Π
δ
0
2
0
sin
454
5
,
26
(
)
(
)
−
−
⋅
−
′
⋅
+
′
⋅
−
−
⋅
=
37
.
0
cos
454
cos
454
5
,
26
37
,
0
5
,
26
Π
δ
δ
Π
x
x
(
)
=
′
⋅
+
−
⋅
−
x
δ
Π
200
37
,
0
200
57
,
57
5
,
173
cos
454
−
′
⋅
+
′
⋅
=
x
x
δ
δ
2
1
S
S
=
57
,
57
5
,
173
cos
454
6
,
147
51
,
39
−
′
⋅
+
′
⋅
=
′
⋅
+
−
x
x
x
δ
δ
δ
0
06
,
18
9
,
25
cos
454
=
−
′
⋅
+
′
⋅
x
x
δ
δ
.
rad
623
,
1
93
=
=
′
o
x
δ
41
STABILNOŚĆ
GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
Zadania
Zadanie 3
Obliczenie maksymalnego czasu przerwy beznapięciowej
Równowaga układu jest zachowana, ponieważ
(
)
(
)
=
⋅
′′′
−
′
−
′
⋅
⋅
⋅
=
S
G
x
NG
m
mx
P
P
S
T
t
ω
δ
δ
1
2
(
)
(
)
s
377
,
0
50
2
4
,
52
200
706
,
0
623
,
1
300
12
2
=
⋅
⋅
⋅
−
−
⋅
⋅
⋅
=
Π
s
25
,
0
s
377
,
0
=
>
=
p
mx
t
t
Document Outline
- SYSTEMY ELEKTROENERGETYCZNE Rozdział 7 STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Wprowadzenie
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Model matematyczny generatora
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zastosowanie metody równych powierzchni
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zastosowanie metody równych powierzchni
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Badanie stabilności dynamicznej podczas zwarć niesymetrycznych
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Badanie stabilności dynamicznej podczas zwarć niesymetrycznych
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Wpływ regulacji wzbudzenia
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Wpływ regulacji wzbudzenia
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
- STABILNOŚĆ GLOBALNA SYSTEMU ELEKTROENERGETYCZNEGO Zadania
Wyszukiwarka
Podobne podstrony:
Kanicki Systemy Rozdział 6
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdzial 5 id 2 Nieznany
Kanicki Systemy Rozdzial 3 id 2 Nieznany
Kanicki Systemy Rozdział 2
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdział 6
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdział 3
Kanicki Systemy Rozdział 5
Obowiązki i uprawnienia operatora systemu rozdzielczego w świetle obowiązujących postanowień Prawa e
rozdzial 1 system?nkowy i?nki ok
rozdział v funkcja systemu szkolnego w procesach reprodukcji społecznej wg szcepańskiego OTRVY22YB
więcej podobnych podstron