1
SYSTEMY ELEKTROENERGETYCZNE
Rozdział
6
REGULACJA CZĘSTOTLIWOŚCI
Łódź, 2011 rok
Andrzej Kanicki
2
REGULACJA CZĘSTOTLIWOŚCI
Wstęp
Każda trwała zmiana obciążenia w systemie elektroenergetycznym powoduje
zaburzenie bilansu mocy czynnej a przez to pewien stan nieustalony. W takim
stanie kołyszą
się
wirniki generatorów oraz rozpoczynają
działać
regulatory
i automatyki zainstalowane w systemie.
Po zakończeniu procesu przejściowego mamy nowy stan ustalony z nowymi
wartościami wektora stanu systemu, czyli stan z nowymi wartościami obciążeń
poszczególnych generatorów. W trakcie tego stanu nieustalonego możemy
wyróżnić
pewne etapy:
9rozdział mocy niezbilansowania według mocy synchronizujących,
9rozdział mocy niezbilansowania według energii kinetycznych mas wirujących,
9rozdział mocy niezbilansowania według charakterystyk regulatorów
pierwotnych turbin.
3
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według mocy synchronizujących
G1
G2
L2
L1
P
o
, Q
o
A
1
S
2
S
δ
δ
1
δ
2
E
d1
E
d2
U
A
I
1
I
2
Δ
U
1
Δ
U
2
δ
δ
1
δ
2
E
d1
E
d2
U
A
I
1
I
2
Δ
U
1
Δ
U
2
U
`
A
Δδ
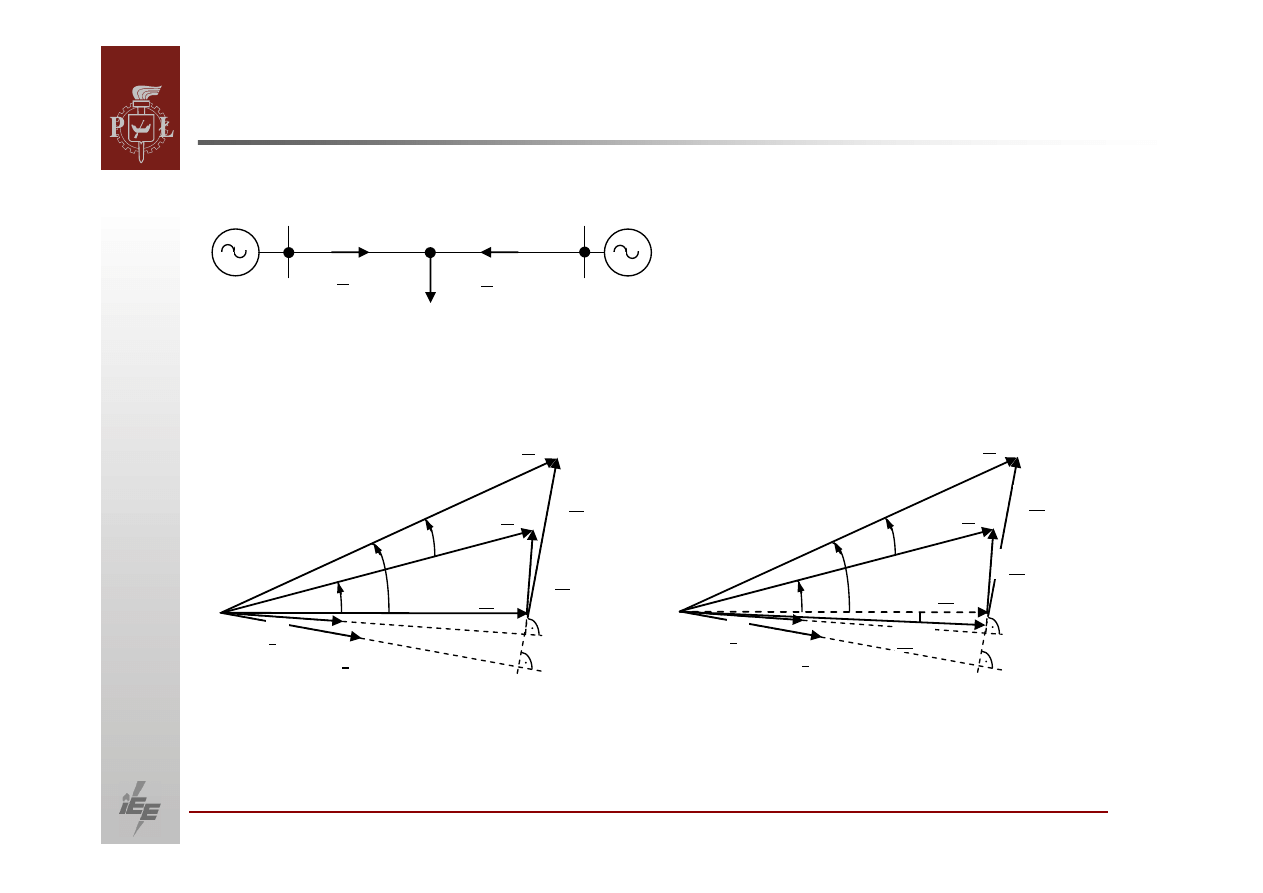
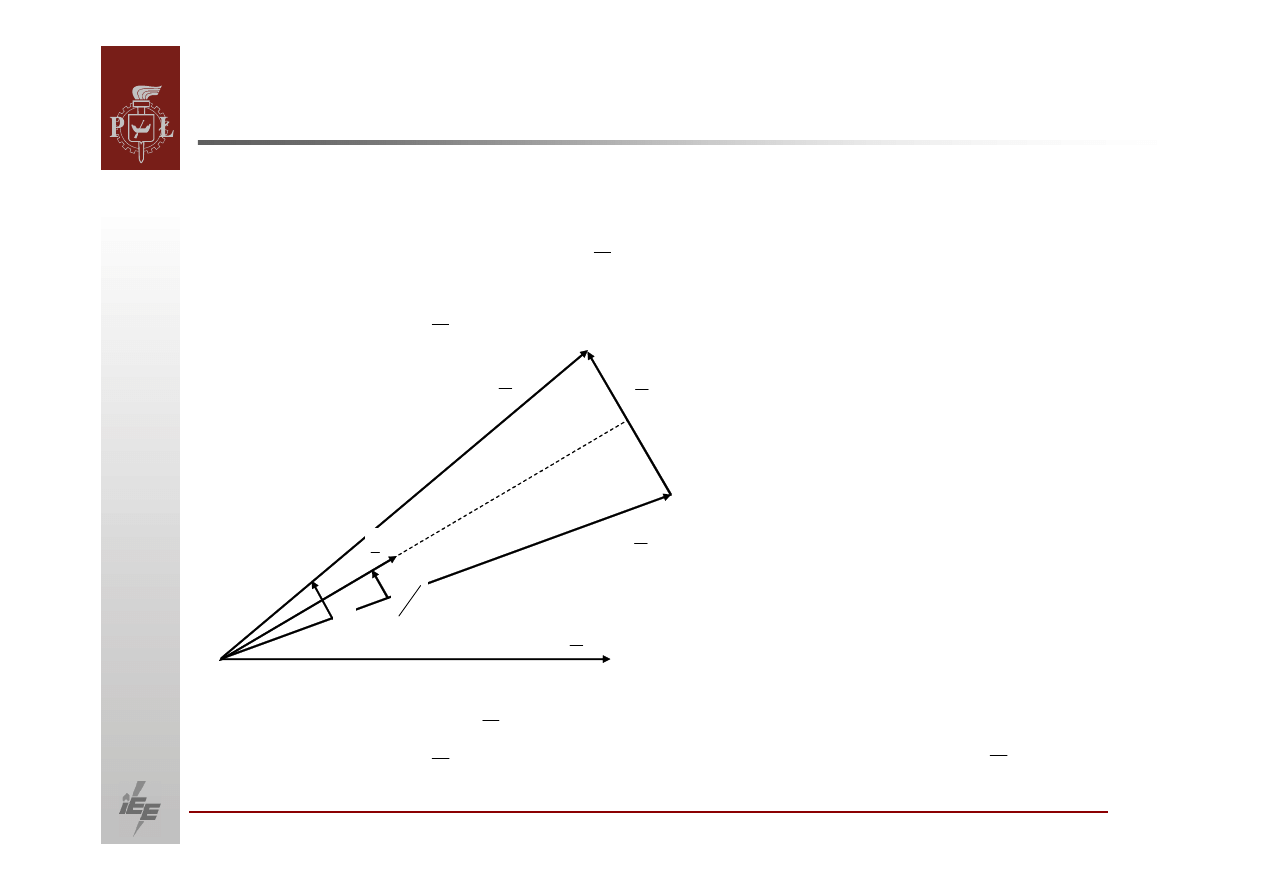
Rozważymy układ dwumaszynowy jak na rysunku.
Wykres wskazowy dla:
a)
b)
s
t
−
= 0
s
t
+
= 0
4
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według mocy synchronizujących
Podczas tworzenia wykresów wskazowych należy pamiętać, że:
1.
Kąt między siłami elektromotorycznymi generatorów 1‐go i 2‐go jest
niezmienny dla oraz ze względu na bezwładność
wirników
generatorów.
2.
Siły elektromotoryczne generatorów 1‐go i 2‐go są
niezmienne ze względu
na bezwładność
regulatorów wzbudzenia generatorów.
3.
Trwałe powiększenie obciążenia w węźle A o moc czynną
powoduje
zwiększone prądy (moce) płynące od generatorów.
4.
Zwiększone prądy (moce) płynące od generatorów powodują
powiększenie
spadków napięcia na reaktancjach linii.
Powyższe warunki powodują, że musi ulec przesunięciu napięcie w węźle A.
Moc przed zakłóceniem można opisać
wzorem:
s
t
−
= 0
s
t
+
= 0
P
Δ
2
2
2
1
1
1
sin
sin
δ
δ
X
U
E
X
U
E
P
A
d
A
d
o
+
=
5
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według mocy synchronizujących
Po zakłóceniu, przy założeniu, że moduł
napięcia na szynach A nie zmienia się
(w rzeczywistości zmienia się
bardzo mało) nowa pobierana moc jest opisana
zależnością:
Powiększenie obciążenia w węźle A o moc czynną
można, więc opisać
następująco:
(
)
(
)
δ
Δ
δ
δ
Δ
δ
Δ
+
+
+
=
+
2
2
2
1
1
1
sin
sin
X
U
E
X
U
E
P
P
A
d
A
d
o
(
)
(
)
[
]
(
)
[
]
=
−
+
+
−
+
=
−
+
=
2
2
2
2
1
1
1
1
sin
sin
sin
sin
δ
δ
Δ
δ
δ
δ
Δ
δ
Δ
Δ
X
U
E
X
U
E
P
P
P
P
A
d
A
d
o
o
δ
Δ
δ
Δ
δ
δ
Δ
δ
Δ
δ
⎟
⎠
⎞
⎜
⎝
⎛
+
+
⎟
⎠
⎞
⎜
⎝
⎛ +
=
2
cos
2
cos
2
2
2
1
1
1
X
U
E
X
U
E
A
d
A
d
(
)
=
⎟
⎠
⎞
⎜
⎝
⎛
−
+
⎟
⎠
⎞
⎜
⎝
⎛
+
+
=
−
+
2
sin
2
cos
2
sin
sin
1
1
1
1
1
1
δ
δ
Δ
δ
δ
δ
Δ
δ
δ
δ
Δ
δ
δ
Δ
δ
Δ
δ
δ
Δ
δ
Δ
δ
δ
Δ
δ
Δ
δ
⎟
⎠
⎞
⎜
⎝
⎛
+
=
⎟
⎠
⎞
⎜
⎝
⎛
+
=
⎟
⎠
⎞
⎜
⎝
⎛
⎟
⎠
⎞
⎜
⎝
⎛
+
=
2
cos
2
2
cos
2
2
sin
2
cos
2
1
1
1
6
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według mocy synchronizujących
W powyższym wzorze mamy składniki będące mocą
synchronizującą
generatorów:
Wzór na powiększenie obciążenia w węźle A o moc czynną
można teraz
zapisać:
Dla układu składającego się
z n generatorów:
Moc przypadająca na i‐ty generator:
⎟
⎠
⎞
⎜
⎝
⎛ +
=
2
cos
1
1
1
1
δ
Δ
δ
X
U
E
P
A
d
s
⎟
⎠
⎞
⎜
⎝
⎛
+
=
2
cos
2
2
2
2
δ
Δ
δ
X
U
E
P
A
d
s
δ
Δ
δ
Δ
Δ
2
1
s
s
P
P
P
+
=
∑
=
=
n
i
si
P
P
1
δ
Δ
Δ
δ
Δ
Δ
i
s
i
P
P
=
7
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według mocy synchronizujących
Wykorzystując, że:
Otrzymujemy:
Z powyższego wzoru wynika, że rozdział
zwiększającego się
obciążenia w węźle
A następuje według mocy synchronizujących.
Po około 0,1 do 0,2 s stan ten jest zakłócany innymi zjawiskami fizycznymi.
Można tutaj przeanalizować
dwa typowe przypadki:
1.
W sieci pracują
dwa takie same generatory, w tej samej odległości od węzła
A ale jeden mniej obciążony od drugiego to większą
część
dołączanej mocy
przypadnie generatorowi mniej obciążonemu.
2.
W sieci pracują
dwa takie same generatory, tak samo obciążone ale jeden z
nich jest generatorem bliskim węzłowi A a drugi dalekim to większą
część
dołączanej mocy przypadnie generatorowi bliskiemu.
∑
=
=
n
i
si
P
P
1
Δ
δ
Δ
∑
=
=
n
i
si
si
i
P
P
P
P
1
Δ
Δ
8
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według energii kinetycznych mas wirujących
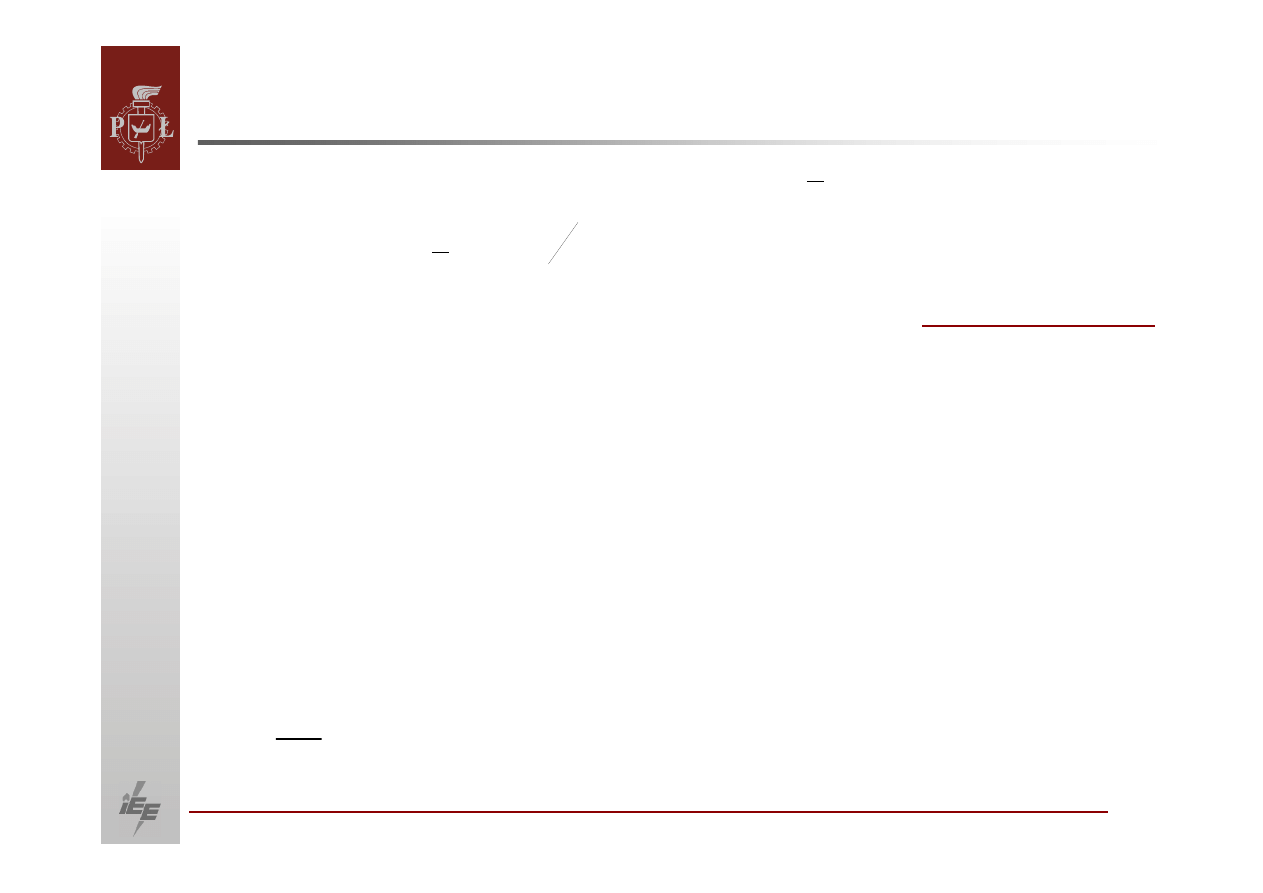
Wzrostom obciążenia poszczególnych generatorów nie towarzyszy zmiana
mocy mechanicznej wytwarzanej przez turbinę. W związku
z tym wirniki
generatorów zaczynają
hamować.
Pokrycie zwiększonego zapotrzebowania na moc elektryczną
odbywa się
teraz
kosztem zamiany części energii kinetycznej wirnika w moc elektryczną.
Zjawiska te trwają
dopóki nie zadziała regulator pierwotny turbiny (2 s para –
10 s woda).
Ponieważ
przyrosty mocy przypadający na i‐ty generator są
różne to w wyniku
tego zmiany prędkości obrotowej każdego generatora będą
różne.
1
2
t
ω
s
ω
0
t
9
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według energii kinetycznych mas wirujących
Na poprzednim rysunku założono, że prędkość
1‐go generatora jest większa od
prędkości drugiego. Dlatego po pewnym czasie siła elektromotoryczna 1‐go
generatora z chwili początkowej przesunęła się
o pewien
kąt do przodu w
stosunku do siły elektromotorycznej 2‐go generatora dając siłę
elektromotoryczną
.
Siłę
elektromotoryczną
zastąpimy sumą
dwóch wektorów: siłą
elektromotoryczną
oraz przyrostem siły elektromotorycznej .
0
1
E
1
1
E
2
E
0
1
E
1
1
E
1
E
Δ
I
δ
2
δ
1
1
E
0
1
E
1
E
Δ
10
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według energii kinetycznych mas wirujących
Pod wpływem przyrostu siły elektromotorycznej popłynie prąd
wyrównawczy opóźniony do tej siły o 90 stopni. Prąd ten wyprzedza siłę
elektromotoryczną
o kąt .
Odpowiada to przepływowi dodatkowej mocy czynnej i
biernej
z
generatora
1
w kierunku generatora 2. Możemy stwierdzić, że powstanie moc wyrównawcza
powodująca przyhamowanie generatora
1.
Moc wyrównawcza dociąża wirnik wirujący szybciej a odciąża wirnik wirujący
wolniej powodując, że prędkości obrotowe obu wirników zaczynają
się
zbliżać
do siebie a w efekcie końcowym stają
się
jednakowe, lecz trzeba pamiętać, że
następuje ciągły, ale teraz jednakowy spadek prędkości obrotowej.
Zjawisko powstawania mocy wyrównawczej w sytuacji, gdy generatory
zaczynają
wirować
z różnymi
prędkościami jest bardzo korzystne i
powoduje
ono, że w systemie elektroenergetycznym pracujemy z jedną
częstotliwością.
Zjawiska te można opisać
matematycznie. W tym celu wykorzystujemy
równanie różniczkowe opisujące ruch obrotowy wirnika w postaci:
1
E
Δ
0
1
E
2
δ
ei
i
i
P
t
d
d
M
Δ
ω
−
=
11
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według energii kinetycznych mas wirujących
Z faktu, że prędkości obrotowe wszystkich generatorów są
jednakowe mamy:
czyli:
Jednocześnie możemy napisać
równanie:
i
Podstawiając otrzymamy:
const.
=
−
=
i
ei
i
M
P
t
d
d
Δ
ω
n
en
e
e
M
P
M
P
M
P
Δ
Δ
Δ
=
=
=
...
2
2
1
1
∑
=
ei
P
P
Δ
Δ
i
i
ei
ei
M
M
P
P
Δ
Δ
=
∑
∑
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⋅
=
i
i
ei
i
i
ei
M
M
P
M
M
P
P
Δ
Δ
Δ
12
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według energii kinetycznych mas wirujących
Z równania poprzedniego wyznaczamy moc przypadają
na i‐ty generator:
Przy pewnych założeniach równanie to można uprościć:
mamy:
Nowy podział
mocy odbywa się
w proporcji współczynnika bezwładności
i‐tej
maszyny do sumy współczynników bezwładności wszystkich maszyn w
systemie. Przy założeniu, że stałe czasowe mechaniczne maszyn są
zbliżone do
siebie można powiedzieć, że podział
mocy odbywa się
w proporcji do mocy
znamionowej i‐tej maszyny do sumy mocy znamionowych wszystkich maszyn.
P
M
M
P
i
i
ei
Δ
Δ
∑
=
i
S
Ni
mi
i
i
i
S
T
J
M
ω
ω
ω
2
=
=
const.
=
mi
T
o
Ni
Ni
ei
P
S
S
P
Δ
Δ
∑
=
13
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Częstotliwość
w systemie elektroenergetycznym jest:
1.
Podstawowym parametrem jakości energii elektrycznej dostarczanej
odbiorcom.
2.
Jednakowa w całym systemie elektroenergetycznym.
Częstotliwość
powinna być
więc możliwie stała i równa częstotliwości
znamionowej.
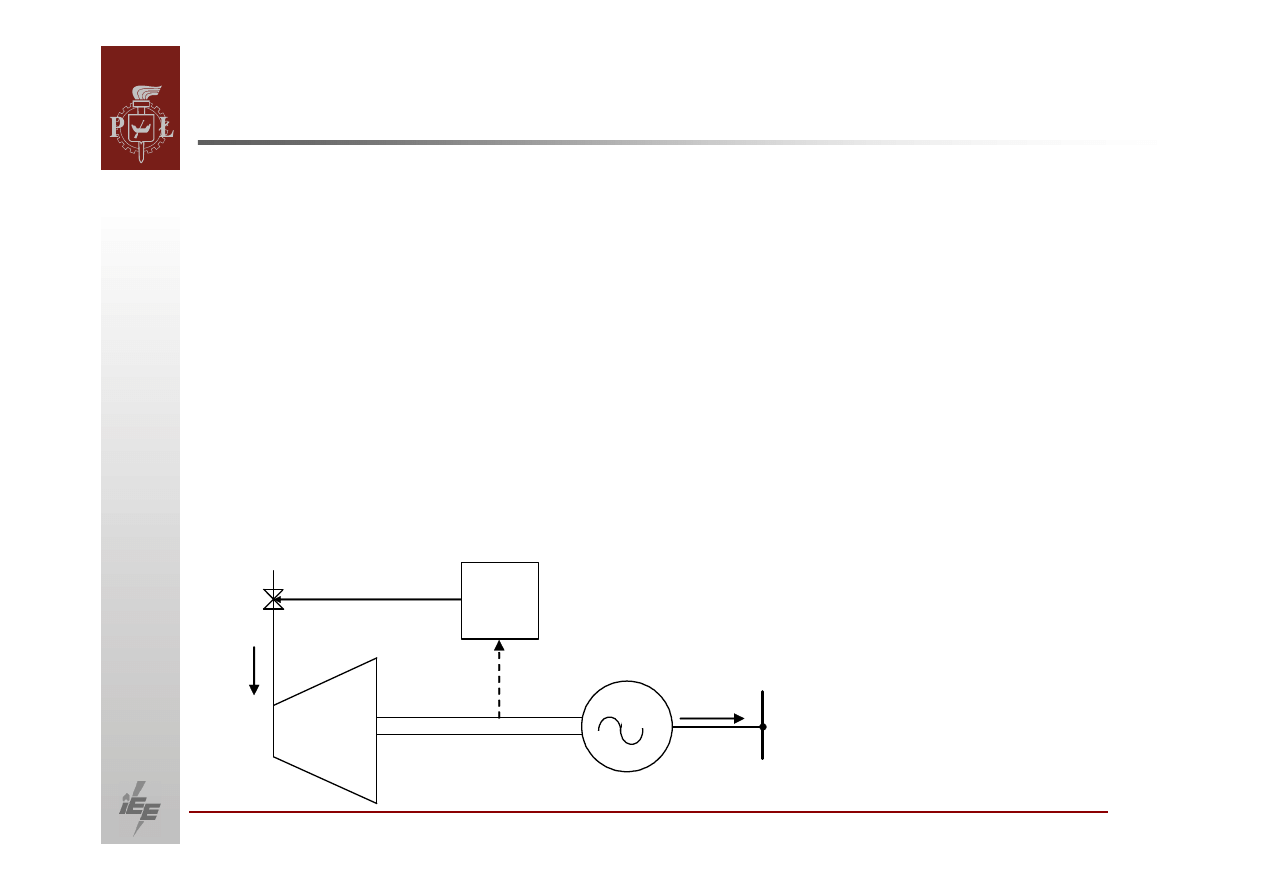
W celu spełnienia powyższego wymogu turbinę
napędzającą
generator należy
wyposażyć
w urządzenie
regulujące dopływ pary lub wody w
taki
sposób,
aby zawsze była spełniona równowaga momentu napędowego i
hamującego. Takie urządzenie nazywamy regulatorem prędkości obrotowej
turbiny – ARP.
ARP
m
P
G
A
e
P
ω
14
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
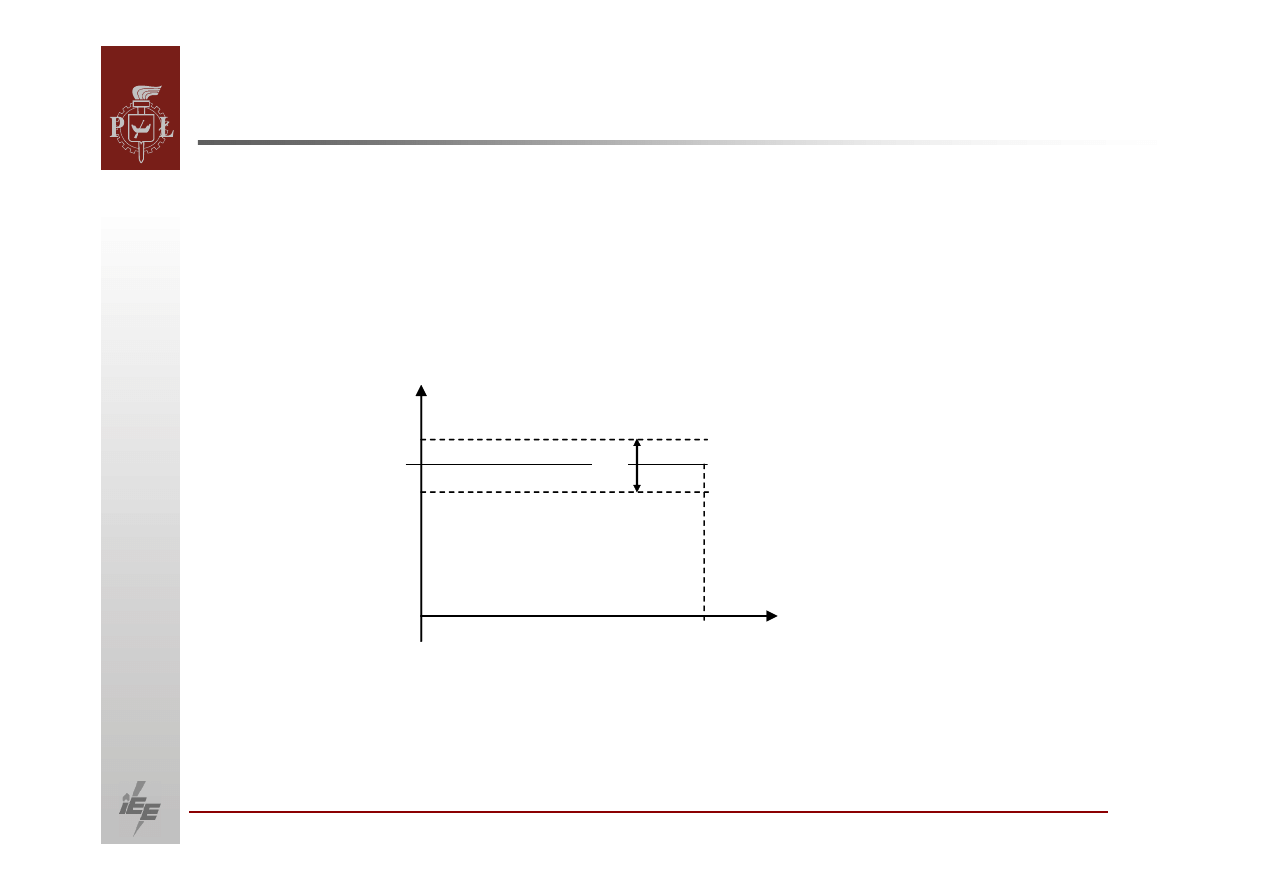
W wypadku samotnej pracy generatora na sieć
wydzieloną, więc wtedy, gdy
nie występuje równoległe połączenie z innymi generatorami, charakterystyka
regulatora prędkości obrotowej może być
astatyczna. Regulator o astatycznej
charakterystyce będzie utrzymywał
stałą
prędkość
obrotową
turbozespołu
niezależnie od mocy czynnej oddawanej przez ten turbozespół. Prędkość
ta
będzie zawierać
się
wewnątrz obszaru wyznaczonego przez strefę
nieczułości
regulatora.
f
N
f
P
N
P
ε
⋅
2
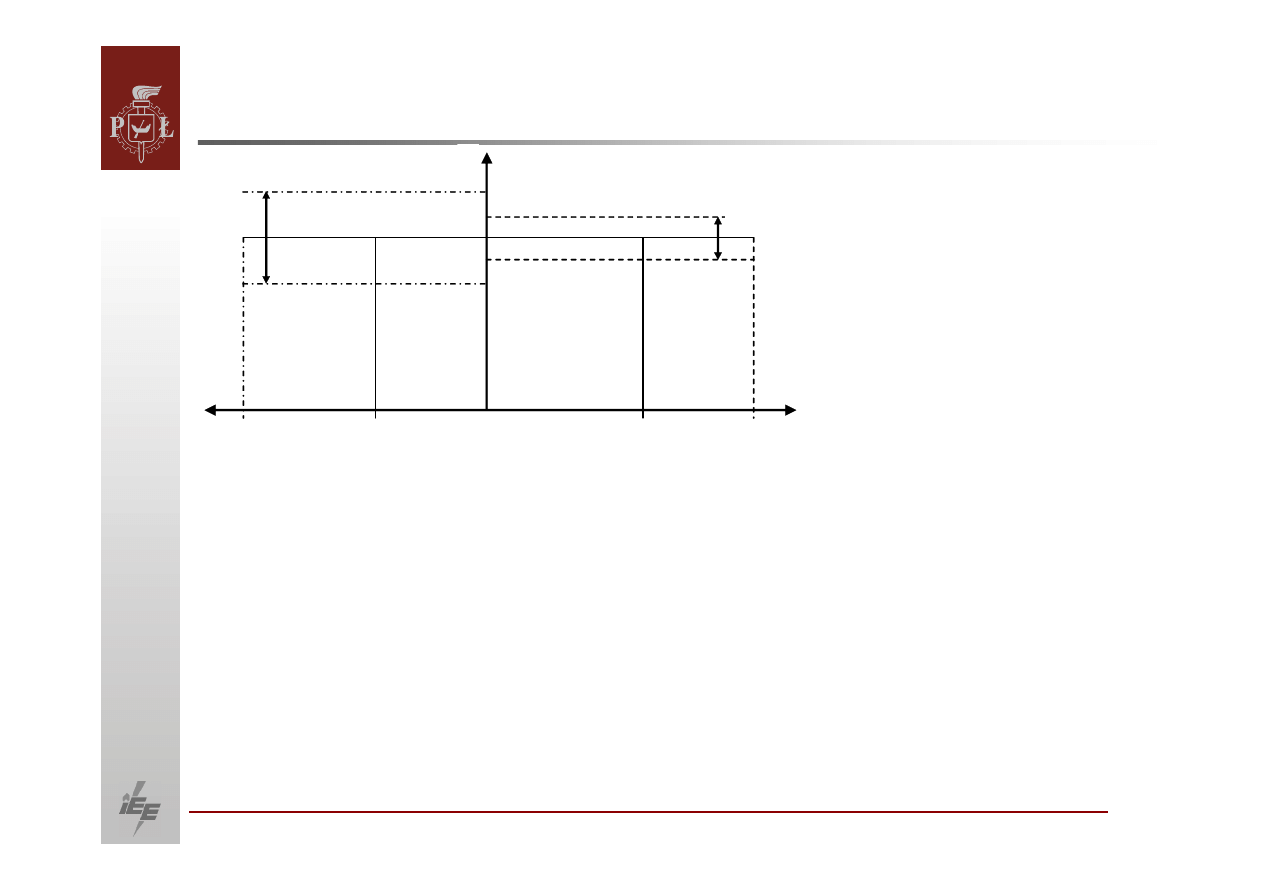
Gdy mamy do czynienia z większą
liczbą
generatorów współpracujących
równolegle, nie możemy ich zaopatrzyć
w regulatory o charakterystykach
astatycznych, ponieważ
te regulatory nie zapewniają
określonego (z góry
założonego) rozdziału obciążeń
pomiędzy generatorami.
15
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
1
P
2
P
f
N
f
1
2
ε
⋅
2
2
ε
⋅
N
P
1
N
P
2
1
P
2
P
Utrzymanie założonego rozdziału mocy pomiędzy generatorami 1 i 2 nie jest
możliwe, ponieważ
regulację
częstotliwości przy jakichkolwiek zakłóceniach
będzie w tym wypadku realizować
ta maszyna, której regulator ma mniejszą
strefę
nieczułości.
16
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Określony rozdział
zmian obciążeń
można uzyskać
nadając regulatorom
charakterystyki statyczne.
Nachylenie charakterystyki regulatora statycznego prędkości obrotowej turbiny
napędzającej generator jest określane przez współczynnik nachylenia .
N
f
Δ
f
P
N
P
1
P
1
2
3
G
K
(
)
N
N
d
I
I
I
N
d
G
N
N
G
G
f
f
f
P
P
P
P
f
f
P
P
f
f
P
P
K
−
−
+
−
=
−
=
−
=
Δ
Δ
Δ
Δ
Δ
17
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
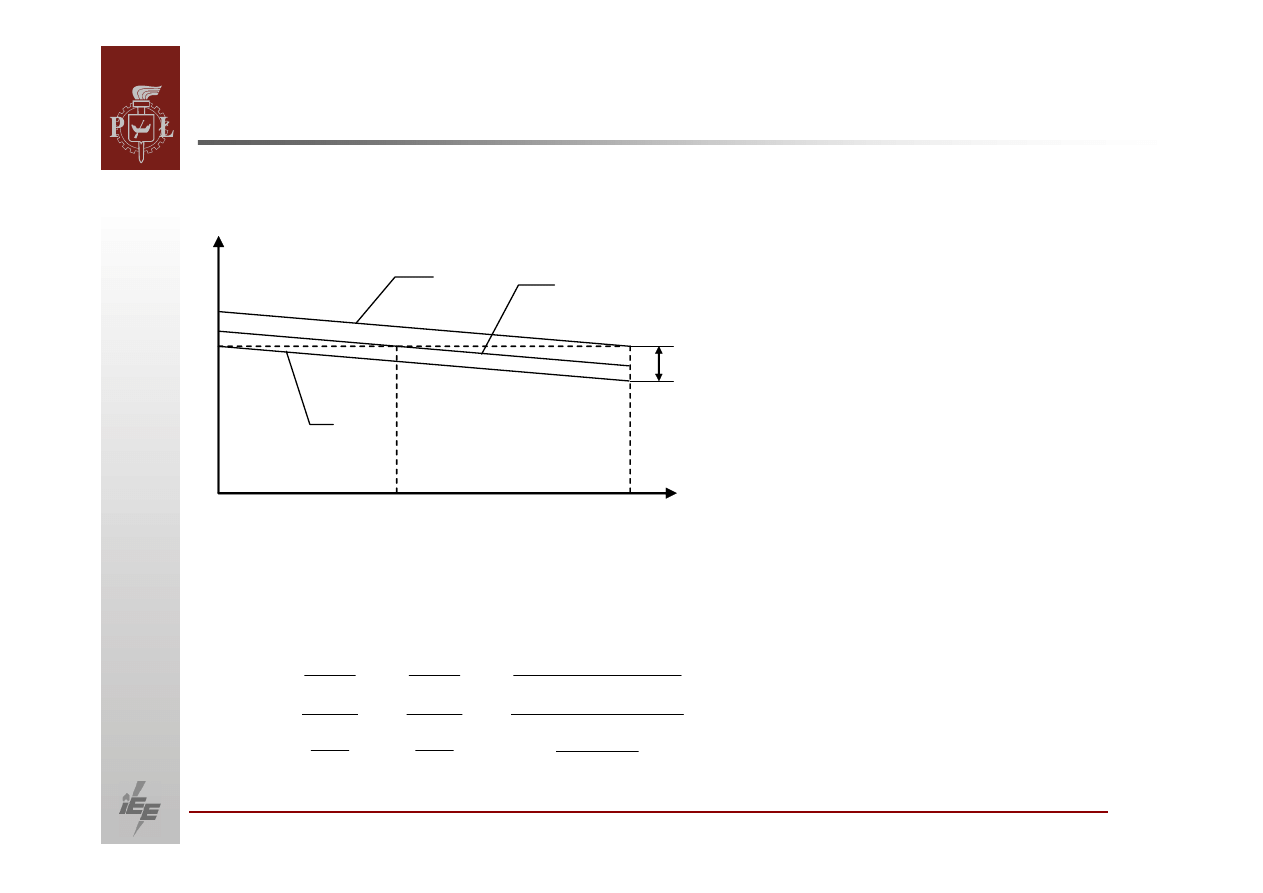
Dla turbozespołów cieplnych współczynnik ten zawiera się
w przedziale 15 ‐
20,
a dla turbozespołów wodnych ‐
w przedziale 25 ‐
50.
Innym parametrem, który podaje się
dla określenia nachylenia charakterystyki
regulatora, jest statyzm charakterystyki regulatora:
i w
uproszczonej
postaci:
Wpływ pochylenia charakterystyk statycznych regulatorów prędkości
obrotowej turbozespołów oraz ich położenia na rozdział
mocy odbieranej z
szyn pomiędzy generatory 1 i 2.
%
100
%
100
1
⋅
−
−
=
⋅
=
d
I
N
N
G
G
P
P
f
f
f
K
s
Δ
%
100
N
f
f
s
Δ
=
18
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
f
2
P
1
2
3
4
N
f
1
f
1
P
2
P
1
P
2
2
P
P
Δ
+
1
1
P
P
Δ
+
2
P
Δ
1
P
Δ
Wybierając dla poszczególnych regulatorów różne nachylenia ich
charakterystyk oraz ich początkowe położenia i otrzymujemy różne
przyrosty obciążenia wartości mocy .
Współczynnik stromości charakterystyki odbiorów:
1
P
2
P
2
1
, P
P
Δ
Δ
( )
N
f
f
o
o
o
f
f
P
P
K
N
Δ
Δ
=
=
19
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Współczynnik jest stosunkiem względnych przyrostów mocy czynnej,
pobieranej przez odbiory, do względnego przyrostu częstotliwości. Średni efekt
dla polskiego systemu można oszacować
na ok. 200‐300
MW. W systemie UCTE
(Union
for the
Co‐ordination
of
Transmission
of
Electricity) przyjmuje się, że
spadek częstotliwości o 1 Hz powoduje zmniejszenie się
obciążenia o 1% czyli
1%/1Hz.
Częstotliwościowa statyczna charakterystyka odbiorów.
Gdy częstotliwość
zmniejszy się
to zmniejszy się
pobór mocy przez odbiorniki.
Jest to tzw. efekt regulacyjny odbiorów.
o
K
f
1
2
3
A
B
C
P
Δ
1
f
N
f
o
P
Δ
G
P
Δ
1
G
P
2
G
P
d
P
P
20
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
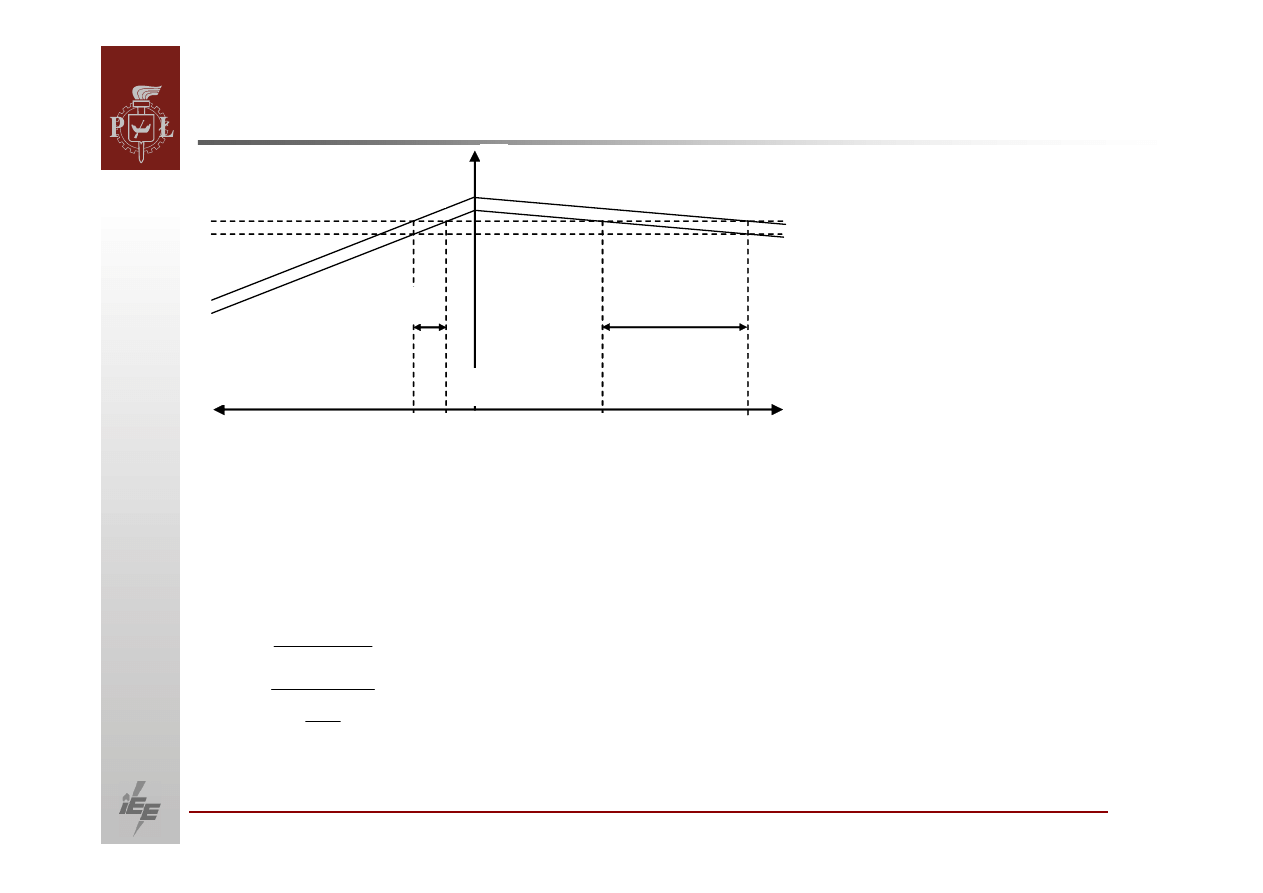
Przebieg stanu nieustalonego od chwili włączenia odbioru do zakończenia
działania regulatora pierwotnego
G
P
o
P
1
2
G
P
G
P
f
3
o
P
4
t
P
t
f
o
P
Δ
G
P
21
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
W pierwszej fazie po zakłóceniu można założyć, że częstotliwość
będzie malała
liniowo zgodnie z zależnością:
Ponieważ
stosunek jest w każdym systemie w przybliżeniu stały i wynosi
około (4÷6) Hz/s, to z wzoru wynika, że początkowa szybkość
malenia
częstotliwości będzie zależała jedynie od stosunku mocy awaryjnie włączonej
lub wyłączonej przez odbiory lub generatory do sumy mocy dyspozycyjnych
wszystkich wirujących generatorów .
W dużym systemie elektroenergetycznym ta ostatnia wielkość
będzie mała, co
powoduje, że początkowa szybkość
malenia częstotliwości będzie także
niewielka, mniejsza niż
w mniejszym systemie. Ostatnie stwierdzenie jest
jednym z powodów tworzenia wielkich systemów elektroenergetycznych
a
także możliwości instalowania w nich większych generatorów.
∑
⋅
−
=
di
N
P
P
T
f
t
d
f
d
Δ
T
f
N
∑
di
P
P
Δ
22
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Przekształcając poprzednie zależności otrzymujemy:
Współczynnik nazywamy mocowym równoważnikiem częstotliwości.
( )
o
N
f
f
o
o
K
f
f
P
P
N
Δ
Δ
=
=
G
N
G
G
K
f
f
P
P
Δ
Δ
1
−
=
o
G
P
P
P
Δ
Δ
Δ
−
=
( )
[
]
o
f
f
o
G
G
N
o
G
K
P
K
P
f
f
P
P
P
N
=
+
−
=
−
=
1
Δ
Δ
Δ
Δ
( )
[
]
o
G
f
f
o
N
K
K
P
f
f
P
N
+
−
=
=
Δ
Δ
[
]
o
G
K
K
+
23
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
W systemie elektroenergetycznym, w którym współpracuje ze sobą
równolegle
pewna liczba turbozespołów zaopatrzonych w regulatory pierwotne o
charakterystykach statycznych względna zmiana częstotliwości spowodowana
zmianą
zapotrzebowania na moc czynną
zależy od średniej stromości
charakterystyk tych regulatorów oraz od mocy wirującej rezerwy.
Średnią
stromość
charakterystyk regulatorów prędkości obrotowej
wyznaczamy następująco:
Gi
N
di
Gi
K
f
f
P
P
Δ
Δ
−
=
(
)
∑
∑
∑
=
=
=
−
=
−
=
nr
i
di
Gsr
N
nr
i
Gi
di
N
nr
i
Gi
P
K
f
f
K
P
f
f
P
1
1
1
Δ
Δ
Δ
(
)
∑
∑
=
=
=
nr
i
di
nr
i
Gi
di
Gsr
P
K
P
K
1
1
24
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
( )
( )
N
N
f
f
o
f
f
o
n
i
di
P
P
P
r
=
=
=
∑
−
=
1
lub w
innej
postaci:
Wprowadza się
pojęcie współczynnika określającego wielkość
rezerwy
wirującej do mocy osiągalnej całego systemu elektroenergetycznego:
( )
1
1
+
=
=
′
=
=
∑
r
P
P
r
N
f
f
o
n
i
di
∑
∑
=
=
=
n
i
di
nr
i
di
P
P
p
1
1
Wprowadzimy teraz pojęcie współczynnika rezerwy wirującej , który jest
miarą
niedociążenia generatorów w
punkcie
pracy:
r
25
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Równanie przyrostu mocy dla systemu wielogeneratorowego, po
uwzględnieniu średniej stromości charakterystyki zastępczego generatora,
możemy zapisać
w postaci:
Względna zmiana częstotliwości:
Z powyższego równania można również
obliczyć
zmianę
częstotliwości po
zmianie obciążenia. Z równania tego wynika, że im mniejszy współczynnik
rezerwy tym większy jest spadek częstotliwości.
( )
=
⎥
⎦
⎤
⎢
⎣
⎡
+
−
=
=
=
∑
o
f
f
o
nr
i
di
Gsr
N
K
P
P
K
f
f
P
N
1
Δ
Δ
( )
[
]
o
Gsr
f
f
o
N
K
r
p
K
P
f
f
N
+
′
−
=
=
Δ
( )
(
)
o
Gsr
f
f
o
N
K
K
p
r
P
P
f
f
n
+
′
−
=
=
Δ
Δ
26
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
W przypadku, gdy jest już
osiągnięta pełna moc turbozespołów to:
Teraz zmiana częstotliwości jest bardzo duża, a
dostarczanie
mocy do nowo
przyłączanych odbiorników jest możliwe tylko dzięki zmniejszeniu poboru mocy
na skutek obniżonej częstotliwości przez odbiorniki dotychczasowe.
Moc przypadająca na i‐ty generator wyniesie:
lub:
( )
o
f
f
o
N
K
P
P
f
f
n
1
=
−
=
Δ
Δ
( )
(
)
o
Gsr
Gi
di
f
f
o
Gi
N
di
Gi
K
K
p
r
K
P
P
P
K
f
f
P
P
n
+
′
=
−
=
=
Δ
Δ
Δ
(
) ( )
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
=
=
∑
o
f
f
o
nr
i
Gi
di
Gi
di
Gi
K
P
K
P
K
P
P
P
n
1
Δ
Δ
27
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
f
N
f
P
w
P
1
P
2
P
3
P
Charakterystyka regulacji systemu złożonego z trzech generatorów
Na odcinku od do w regulacji częstotliwości biorą
udział
wszystkie trzy
turbozespoły i
dlatego
charakterystyka zastępcza jest najbardziej płaska. Gdy
zespól trzech generatorów oddaje do sieci moc czynną
następuje załamanie
charakterystyki spowodowane osiągnięciem przez jeden z turbozespołów jego
mocy znamionowej (jak i dlaczego zmienia się
wtedy ?), co powoduje
wyłączenie tego turbozespołu z procesu regulacji częstotliwości. Następny
turbozespół
wyłącza się
z procesu regulacji w punkcie, w którym do sieci jest
oddawana moc .
w
P
1
P
1
P
Gsr
K
2
P
28
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Można wyróżnić
trzy podstawowe sposoby rozdziału mocy dostarczanej przez
poszczególne generatory:
1.
Rozdział
proporcjonalny
2.
Rozdział
równomierny
3.
Rozdział
mieszany
Ad. 1) W rozdziale proporcjonalnym wszystkie turbogeneratory dostarczające
moc czynną
do systemu są
obciążone proporcjonalnie w zakresie od mocy
minimalnej do maksymalnej każdego turbogeneratora.
Ad. 2) W rozdziale równomiernym wszystkie generatory są
obciążone
identyczne.
Ad. 3) W rozdziale mieszanym wszystkie generatory są
podzielone na dwie
podstawowe grupy:
9 Generatory prowadzące częstotliwość w systemie.
9 Generatory pracujące ze stałą mocą czynną oddawaną do sieci.
29
REGULACJA CZĘSTOTLIWOŚCI
Rozdział
według charakterystyk regulatorów pierwotnych turbin
Pierwsza grupa
obejmuje turbozespoły wyposażone w odpowiednio
nowoczesne regulatory częstotliwości. Konstrukcja tych turbozespołów sprzyja
realizacji funkcji prowadzenia częstotliwości w systemie, to znaczy
turbozespoły te mogą
pracować
w
odpowiednio
szerokim zakresie
częstotliwości oraz mocy oddawanych. Generatory pierwszej grupy przyjmują
na siebie cały ciężar regulacji mocy w systemie, która to regulacja ma zapewnić
utrzymanie warunku .
Druga grupa
obejmuje turbozespoły, których konstrukcja uniemożliwia
dokonywanie szybkich i częstych
zmian prędkości obrotowej wału turbiny.
Dlatego generatory tej grupy mają
w praktyce wyłączone układy regulacji
częstotliwości i pracują
cały czas ze stałą
mocą
czynną
oddawaną
do sieci. Gdy
zapotrzebowanie na moc spada i kończą
się
możliwości regulacyjne maszyn
pierwszej grupy, dokonuje się
wyłączeń
wybranych maszyn drugiej grupy
(odstawia się
określone bloki energetyczne) lub odwrotnie.
N
f
f
=
30
REGULACJA CZĘSTOTLIWOŚCI
Lawina częstotliwości
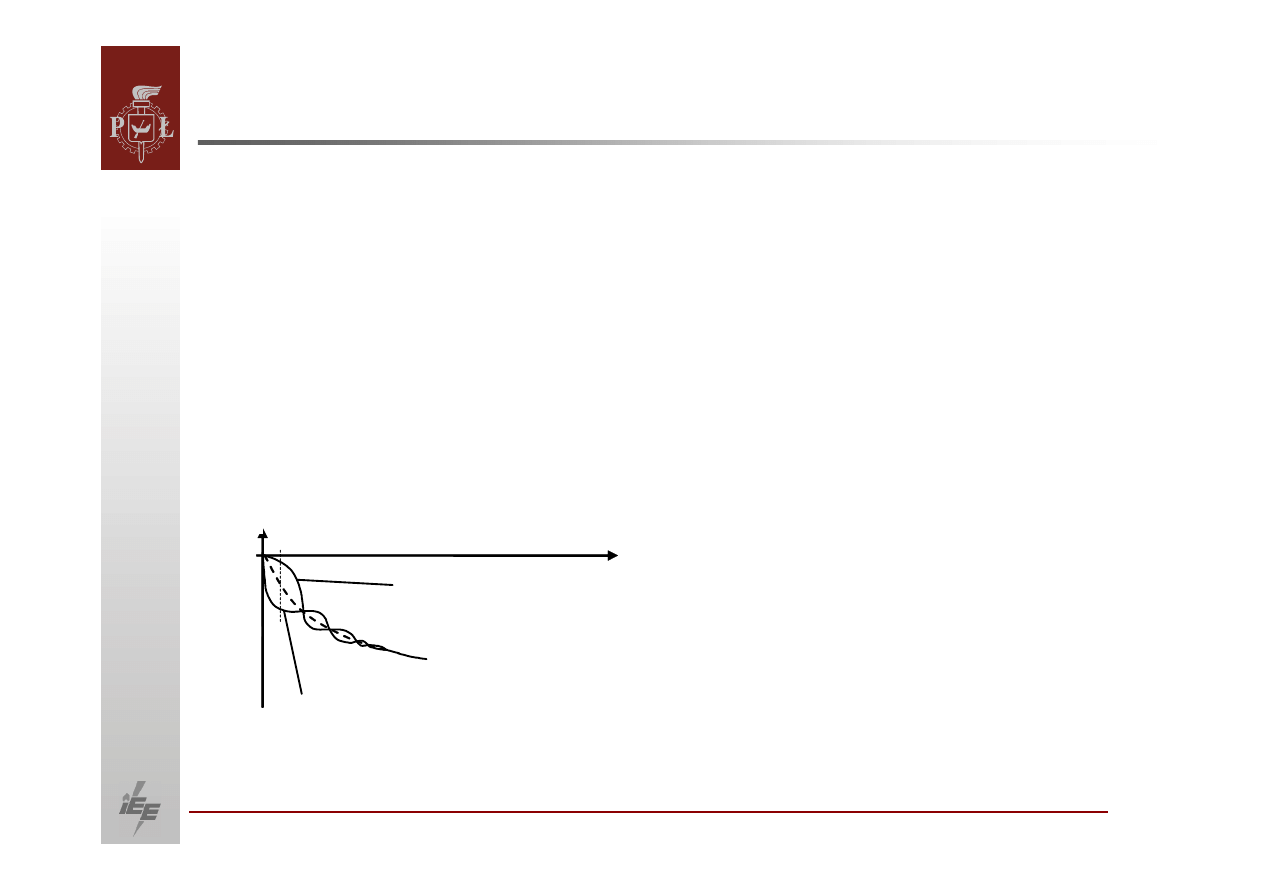
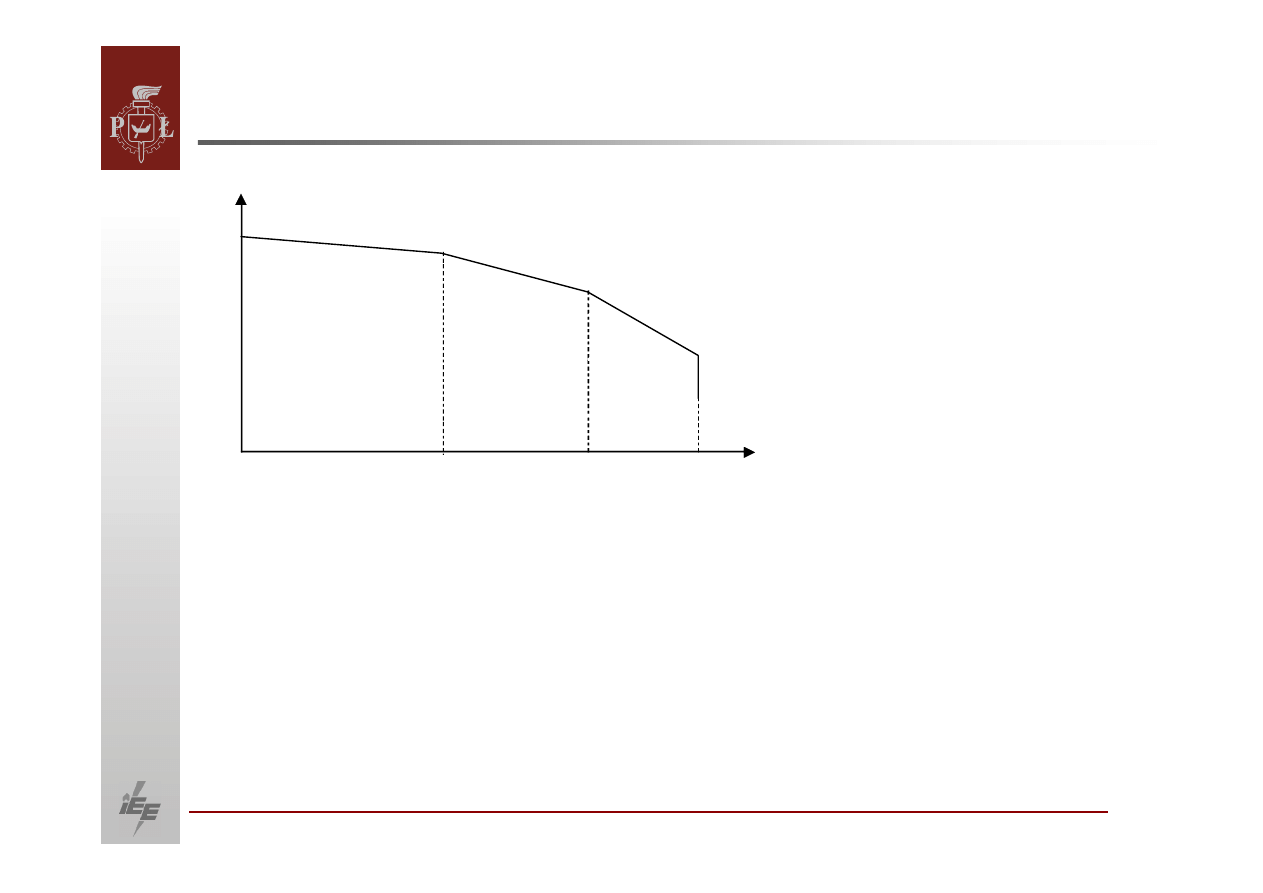
Dotychczas zakładano, że przy pełnym obciążeniu moc turbiny jest stała i nie
zależy od częstotliwości. W rzeczywistości nie jest to prawdziwe stwierdzenie.
Przy pełnym otwarciu zaworów turbiny i stałym
przepływie czynnika
napędzającego stały jest moment turbiny a nie moc. Powoduje to, że moc jest
wprost proporcjonalna do częstotliwości a
charakterystyka
regulatora nie jest
pionowa, lecz pochylona pod kątem 45o. Zmniejszenie częstotliwości napięcia
generatorowego powoduje spadek wydajności urządzeń
potrzeb własnych
elektrowni, co ogranicza ilość
czynnika napędzającego i dalsze ograniczenie
wielkości produkowanej mocy czynnej generatora. Można w przybliżeniu
przyjąć, że charakterystyka jednostki wytwórczej przy zmiennej częstotliwości
będzie taka jak na rysunku.
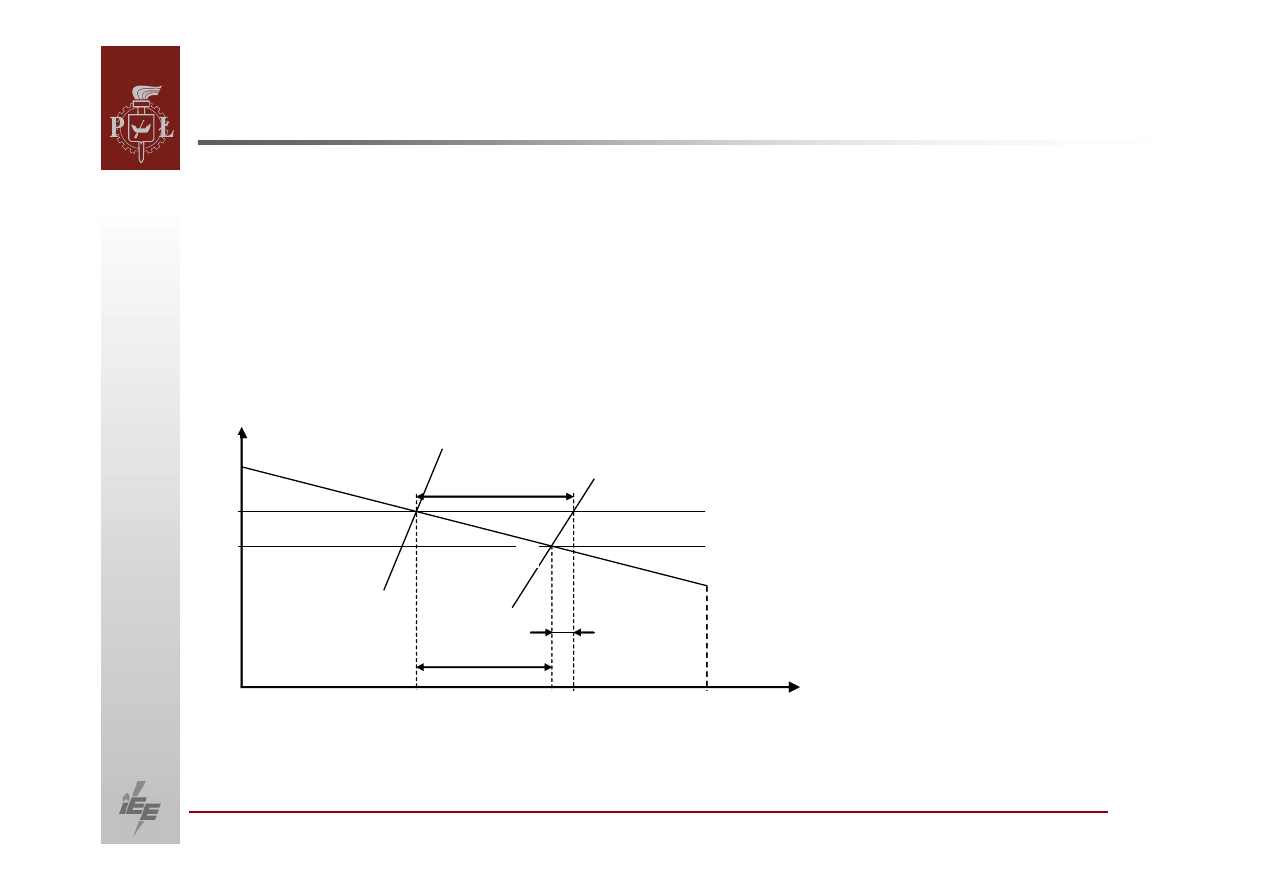
31
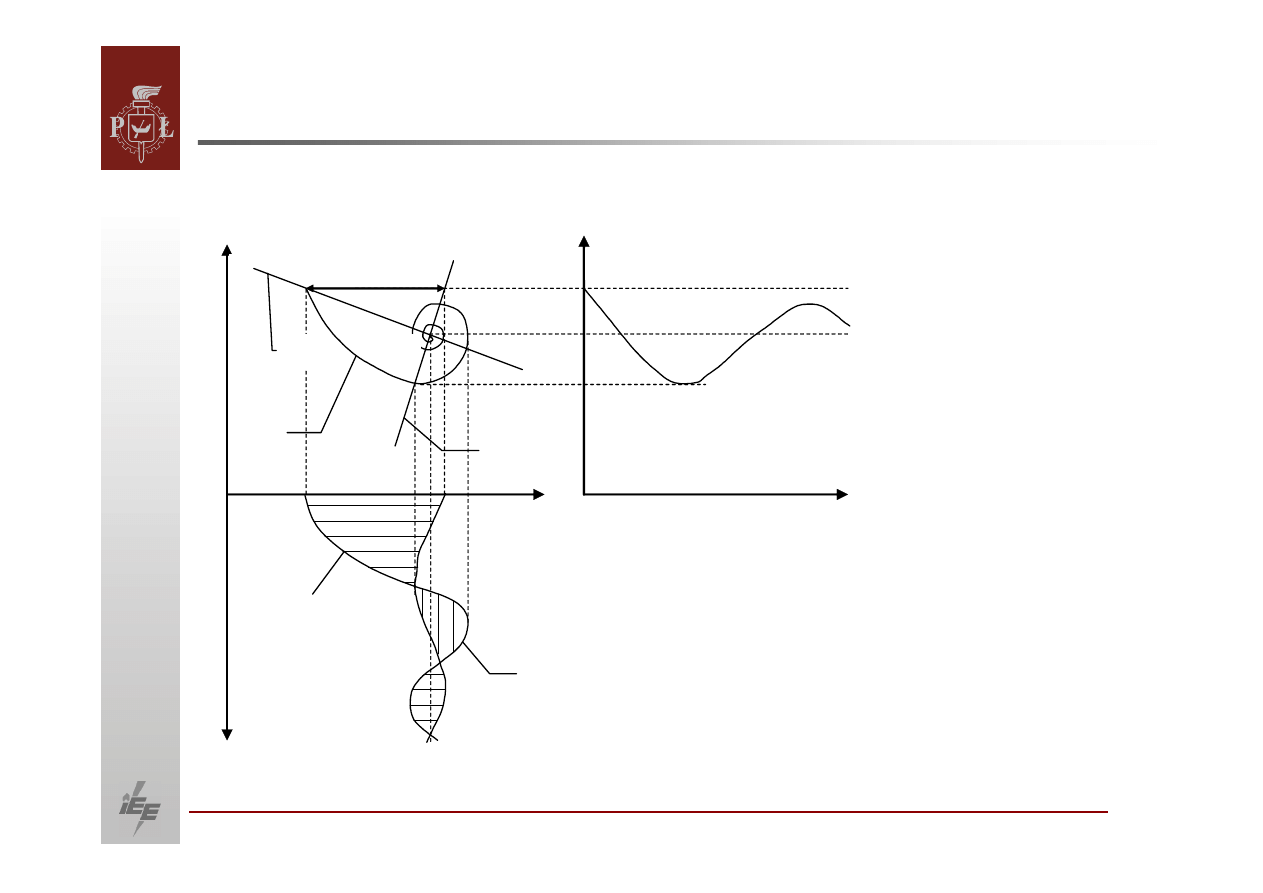
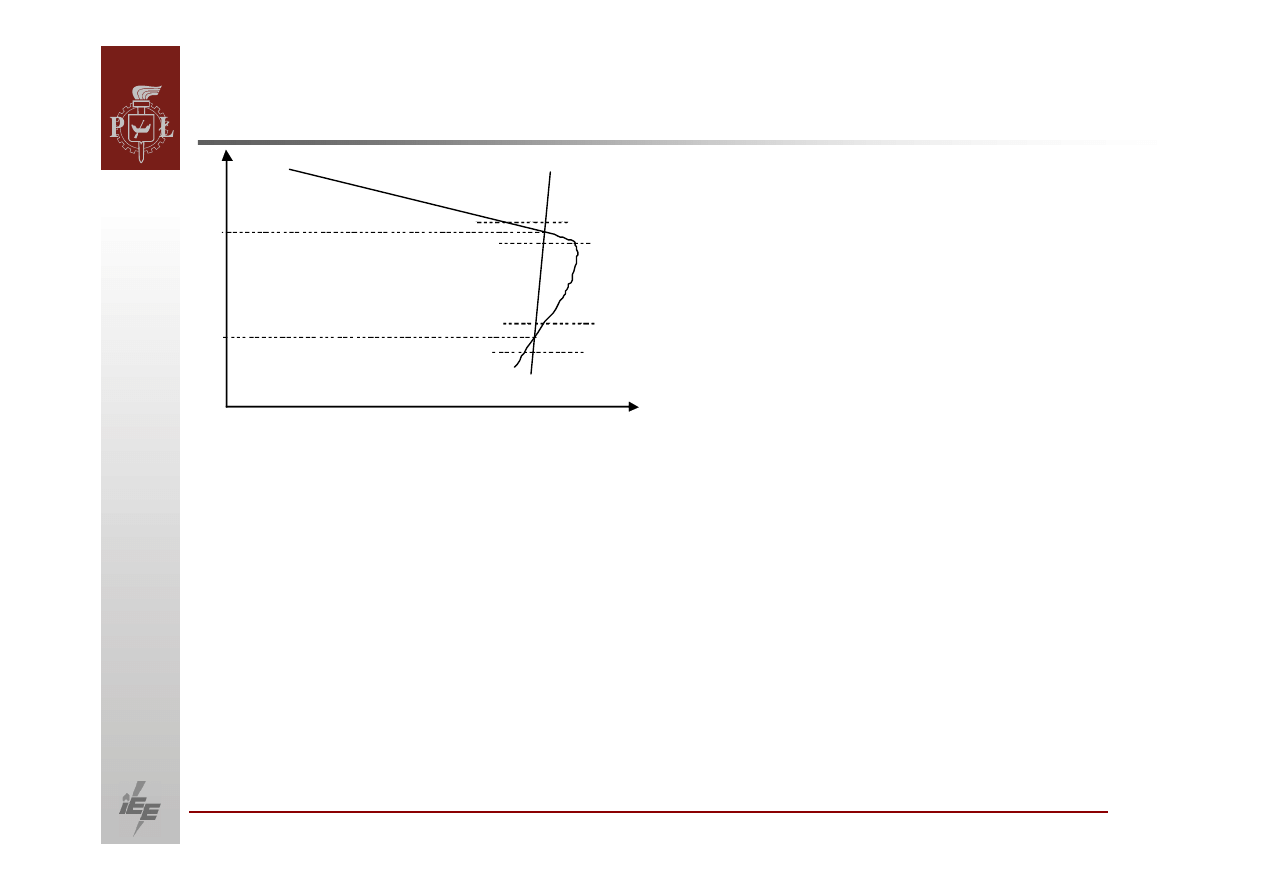
REGULACJA CZĘSTOTLIWOŚCI
Lawina częstotliwości
f
P
1
2
P
o
P
G
Rozważono takie położenie charakterystyki odbioru, które przecina
charakterystykę
regulatora w dwóch miejscach –
w
punktach
1 i 2. Podczas
pracy w
punkcie
1 zakłócenie np. w postaci nadwyżki częstotliwości powoduje,
że moc odbioru jest większa od mocy generatora i dlatego układ wraca do
punktu równowagi 1. Podczas pracy w punkcie 1 i zakłócenia
w
postaci
obniżki
częstotliwości powoduje, że moc odbioru jest mniejsza od mocy generatora
i dlatego układ wraca do punktu równowagi 1.
32
REGULACJA CZĘSTOTLIWOŚCI
Lawina częstotliwości
Inaczej układ zachowa się
podczas pracy w
punkcie
2. Zakłócenie w postaci
nadwyżki częstotliwości powoduje, że moc odbioru jest mniejsza od mocy
generatora i dlatego układ wraca do punktu równowagi 1 a nie do punktu 2. To
zakłócenia wskazuje już, że punkt 2 jest punktem niestabilnym. W przypadku
pracy w
punkcie
2 i zakłócenia
w
postaci
obniżki częstotliwości mamy, że moc
odbioru jest większa od mocy generatora i układ
zaczyna dalej zmniejszać
swoją
częstotliwość
powodując jeszcze większą
nierównowagę
mocy.
W efekcie układ nie wraca do punktu równowagi do punktu 2 a częstotliwość
zaczyna lawinowo zmniejszać
się. Zjawisko to nazwano lawiną
częstotliwości.
Prowadzi to utraty stabilnej pracy całego lub części systemu
elektroenergetycznego.
W oparciu o powyższe
rozważania można sformułować
dodatkowe kryterium
badania stabilności lokalnej systemu a mianowicie:
stabilna
0
⇒
<
f
d
P
d
a
niestabiln
0
⇒
≥
f
d
P
d
33
REGULACJA CZĘSTOTLIWOŚCI
Działanie regulatora wtórnego systemu
Regulator wtórny systemu elektroenergetycznego to zazwyczaj regulator typu
PI i jest to centralny regulator systemu. Mierzy on częstotliwość
i sumę
mocy
wymiany z zagranicą. Moc wymiany z zagranicą
jest mierzona poprzez
telepomiary na wszystkich liniach łączących Polskę
z innymi krajami, czyli
obecnie są
to połączenia z Niemcami, Czechami i Słowacją.
Regulator wtórny można opisać
równaniem:
gdzie:
‐
odchyłka wymiany mocy dla obszaru regulacyjnego to różnicą
między
rzeczywistą
mocy wymiany (będąca sumą
pomierzonych mocy wymiany na
liniach granicznych) i
zadaną
mocą
zaplanowaną
do wymiany zgodnie z
podpisaną
umową, co oznacza, że gdy wysyłamy więcej mocy niż
zaplanowano i odwrotnie.
‐
obszarowy uchyb regulacji po angielsku Area
Control
Error
(ACE).
(
)
(
)
∫
Δ
⋅
+
Δ
⋅
−
Δ
⋅
+
Δ
⋅
−
=
Δ
t
o
r
w
r
r
w
p
dt
f
P
T
f
P
P
λ
λ
β
1
w
P
Δ
0
>
w
P
Δ
(
)
f
P
r
w
Δ
⋅
+
Δ
λ
34
REGULACJA CZĘSTOTLIWOŚCI
Działanie regulatora wtórnego systemu
‐
współczynnik wzmocnienia regulatora wtórnego wynoszący (0÷0,5).
‐
statyzm regulatora wtórnego w MW/Hz.
‐
stała czasowa regulatora wtórnego wynosząca około (50÷200) s.
‐
odchyłka częstotliwości będąca różnicą
między rzeczywistą, mierzoną
częstotliwością
a częstotliwością
znamionową.
Regulator wtórny sygnał
rozdziela proporcjonalnie pomiędzy wszystkie
jednostki uczestniczące w regulacji wtórnej. Sygnał
ten poprzez system
telemechaniki jest wysyłany do wszystkich generatorów uczestniczących w
regulacji częstotliwości. Sygnał
ten przesuwa charakterystykę
regulatora
pierwotnego do góry lub do dołu w zależności
czy częstotliwość
jest mniejsza
czy większa od znamionowej.
Ponieważ
moc w
funkcji
czasu narasta wykładniczo to ww. sygnał
regulacyjny
nie w pierwszym kroku prowadzi do częstotliwości znamionowej. Jednak
w wyniku działania regulatora wtórnego osiągamy częstotliwość
znamionową
po kilkudziesięciu sekundach lub kilku minutach.
β
r
λ
r
T
f
Δ
P
P
Δ
35
REGULACJA CZĘSTOTLIWOŚCI
Działanie regulatora wtórnego systemu
N
f
f
<
0
>
w
P
Δ
N
f
f
<
W oparciu o zmianę
częstotliwości i mocy wymiany z zagranicą
można
stwierdzić, który obszar regulacyjny jest winny zakłócenia, i tak, jeśli:
9
oraz to wina leży po stronie naszego systemu
elektroenergetycznego albowiem wysyłamy więcej mocy powodując
zwiększanie się częstotliwości.
9
oraz to wina leży po stronie sąsiedniego systemu
elektroenergetycznego albowiem wysyłamy mniej mocy powodując obniżanie
się częstotliwości.
9
oraz to wina leży po stronie naszego systemu
elektroenergetycznego albowiem wysyłamy mniej mocy powodując obniżanie
się częstotliwości.
9
oraz to wina leży po stronie sąsiedniego systemu
elektroenergetycznego albowiem wysyłamy więcej mocy powodując
zwiększanie się częstotliwości.
N
f
f
>
0
>
w
P
Δ
N
f
f
>
0
<
w
P
Δ
0
<
w
P
Δ
36
REGULACJA CZĘSTOTLIWOŚCI
Obrona systemu elektroenergetycznego przy wahaniach
częstotliwości
W sytuacji wystąpienia spadku częstotliwości poniżej 49,8 Hz rozpoczynają
się
działania mające na celu obronę
systemu elektroenergetycznego przed
ewentualnym blackout.
Działania te są
kolejno następujące:
1.
Przy częstotliwości 49,8 Hz
•
przejście z obszarowego uchybu regulacji na:
•
przełączenie hydrozespołów w elektrowniach szczytowo‐pompowych z
pracy pompowej na pracę
prądnicową,
•
uruchomienie wszystkich zespołów wytwórczych mających szybki
rozruch np. agregatów prądotwórczych czy turbin gazowych.
2.
Przy częstotliwości 49,7 Hz uruchomia się
dodatkową
regulację
pierwotną
w
tych zespołach, które wyjściowo posiadają
strefę
martwą
wynoszącą
.
3.
Przy częstotliwości 49,5 Hz regulatory turbin są
przełączane z trybu regulacji
mocy zgodnie z ich charakterystyką
statyczną
na tryb regulacji obrotów.
(
)
∫
⋅
−
⋅
−
=
t
o
r
r
r
p
dt
f
T
f
P
Δ
λ
Δ
λ
Δ
1
mHz
300
±
37
REGULACJA CZĘSTOTLIWOŚCI
Obrona systemu elektroenergetycznego przy wahaniach
częstotliwości
4.
Przy częstotliwości 49,0 Hz rozpoczyna działanie automatyka samoczynnego
odciążenia częstotliwościowego odciążania SCO.
W sytuacji wystąpienia zrostu częstotliwości powyżej 50,2 Hz rozpoczynają
się
działania mające na celu obronę
systemu elektroenergetycznego przed
ewentualnym blackout.
Działania te są
kolejno następujące:
1.
Przy częstotliwości 50,2 Hz następuje:
•
zmiana obszarowego uchybu regulacji na postać
,
•
przełączenie hydrozespołów w elektrowniach szczytowo‐pompowych z
pracy prądnicowej na pracę
pompową,
•
wyłączenie wszystkich zespołów wytwórczych mających szybki rozruch
np. agregatów prądotwórczych czy turbin gazowych.
2.
Przy częstotliwości 50,3 Hz uruchomia się
dodatkową
regulację
pierwotną
w
tych zespołach, które wyjściowo posiadają
strefę
martwą
wynoszącą
.
3.
Przy częstotliwości 50,5 Hz regulatory turbin są
przełączane z trybu regulacji
mocy zgodnie z ich charakterystyką
statyczną
na tryb regulacji obrotów.
f
r
Δ
λ
⋅
mHz
300
±
38
REGULACJA CZĘSTOTLIWOŚCI
Obrona systemu elektroenergetycznego przy wahaniach
częstotliwości
Należy tu pamiętać, że przy częstotliwościach 48,0 Hz i 52,0 Hz zabezpieczeni
turbin powodują
wyłączanie zespołów wytwórczych i przechodzą
one do pracy
na potrzeby własne.
Automatyka samoczynnego odciążenia częstotliwościowego odciążania SCO
Dodatkowym układem działającym na utrzymanie częstotliwości znamionowej
jest automatyka samoczynnego odciążenia częstotliwościowego odciążania
SCO. Powoduje ona wyłączanie odbiorów przy znacznych obniżkach
częstotliwości. W automatyce przekaźnik podczęstotliwościowy mierzy
częstotliwość
i przy odpowiedniej wartości wyłącza przewidziane wcześniej
odbiory. Przekaźniki podczęstotliwościowe automatyki SCO są
instalowane
w stacjach średnich napięć
i
powodują
wyłączenia wybranych linii średnich
napięć. Automatyka SCO jest dzielona na kilka stopni w zależności od
częstotliwości.
W związku z
bardzo
rzadkimi przypadkami działania przekaźników
podczęstotliwościowych pewnym problemem jest efektywność
ich działania.
39
REGULACJA CZĘSTOTLIWOŚCI
Obrona systemu elektroenergetycznego przy wahaniach
częstotliwości
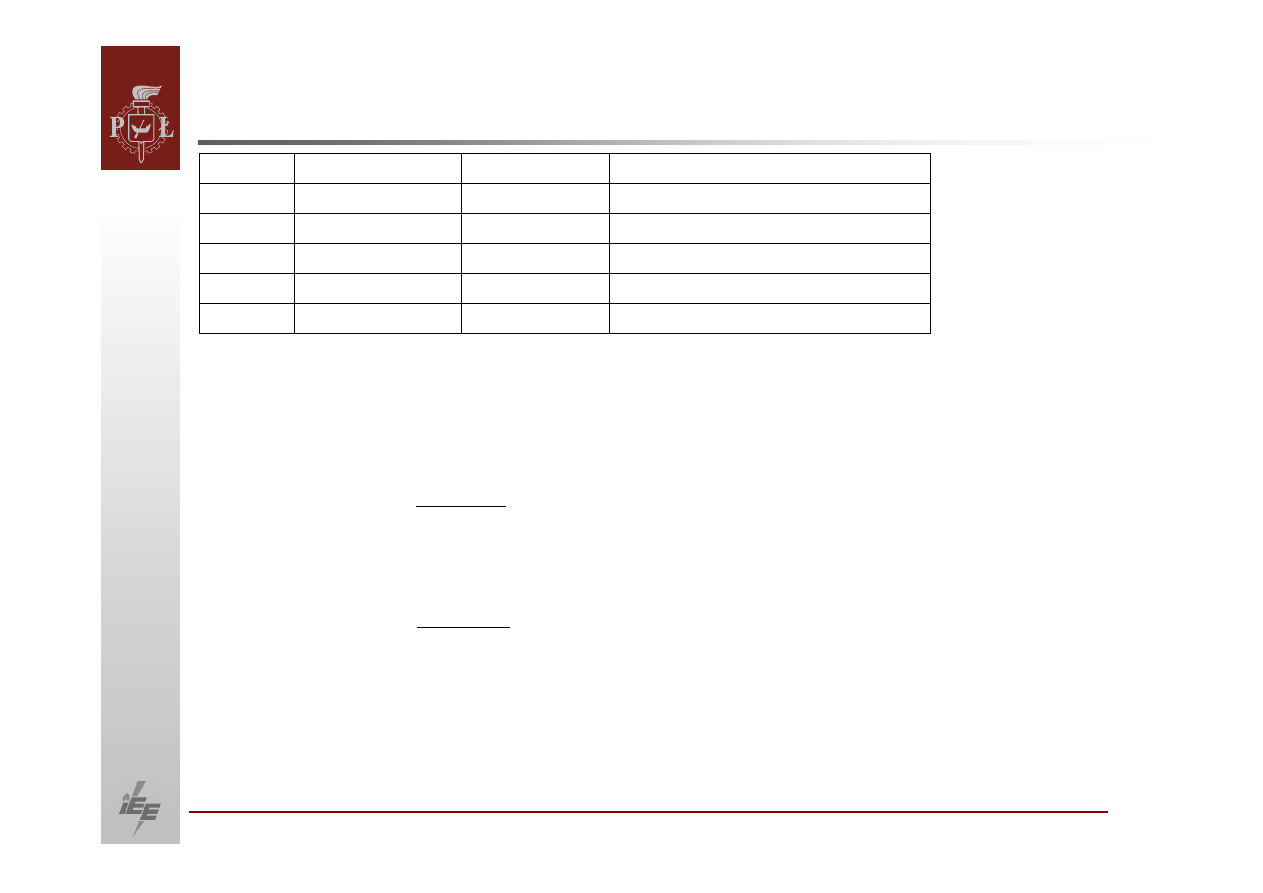
Stopień Częstotliwość
Opóźnienie Działanie
I
49,0 Hz
0.5 s
Wyłącza ok. 10% mocy
II
48.7 Hz
0.5 s
Wyłącza ok. 10% mocy
III
48.5 Hz
0.5 s
Wyłącza ok. 10% mocy
IV
48.3 Hz
0.5 s
Wyłącza ok. 10% mocy
V
48.1 Hz
0.5 s
Wyłącza ok. 10% mocy
W pierwszym
stopniu automatyki SCO powinniśmy wyłączyć
następującą
moc
(w jednostkach względnych) aby utrzymać
częstotliwość
na zadanym
poziomie:
Ogólnie dla k‐tego
stopnia mamy:
Problemami związanymi z działaniem automatyki SCO są:
1.
Współczynniki i są
wyznaczane dla szczytu obciążenia systemu
elektroenergetycznego.
(
)
N
N
I
o
G
oI
f
f
f
K
K
P
−
+
=
Δ
(
)
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
−
+
=
∑
−
=
1
1
1
k
i
oi
N
N
k
o
G
ok
P
f
f
f
K
K
P
Δ
Δ
G
K
o
K

40
REGULACJA CZĘSTOTLIWOŚCI
Obrona systemu elektroenergetycznego przy wahaniach
częstotliwości
2.
Wartości rzeczywistej wyłączanej mocy w sytuacji, gdy nie występuje szczyt
obciążenia np. w
okresie
letnim. W tej sytuacji rzeczywiście wyłączana moc
jest znacznie mniejsza od tej wyznaczanej z powyższych wzorów.
3.
Skuteczność
działania automatyki SCO w rzeczywistej sytuacji awaryjnej
związana z poprawnością
działania przekaźników podczęstotliwościowych.
Przykład
Zakładając, że , wyliczyć, jaką
część
mocy należy wyłączyć
w
poszczególnych
stopniach SCO.
10
−
=
G
K
1
=
o
K
(
)
144
.
0
50
50
2
.
49
1
10
=
−
+
−
=
oI
P
Δ
(
)
(
)
185
.
0
144
.
0
1
50
50
8
.
48
1
10
=
−
−
+
−
=
oII
P
Δ
(
)
(
)
193
.
0
185
.
0
144
.
0
1
50
50
4
.
48
1
10
=
−
−
−
+
−
=
oIII
P
Δ
(
)
(
)
163
.
0
193
.
0
185
.
0
144
.
0
1
50
50
1
.
48
1
10
=
−
−
−
−
+
−
=
oIV
P
Δ
41
REGULACJA CZĘSTOTLIWOŚCI
Obrona systemu elektroenergetycznego przy wahaniach
częstotliwości
Razem mamy: 0.685.
Policzmy wartość
gdyby zastosować
jeden stopień
na 48.1 Hz.
(
)
342
.
0
50
50
1
.
48
1
10
=
−
+
−
=
oI
P
Δ
42
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
Wymagania dla regulacji częstotliwości w tym regulacji pierwotnej opracowano
w oparciu o
"Operational
Handbook" wydany przez UCTE czyli Union
for the
Co‐ordination
of
Transmission
of
Electricity. W systemie UCTE proces regulacji
częstotliwości jest procesem regulacji rozproszonej na poszczególne obszary
regulacji (Control
Area). Obszar regulacji jest określony porozumieniami
pomiędzy operatorami systemów elektroenergetycznych w celu umożliwienia
centralnej regulacji wybranych parametrów energii elektrycznej.
Proces regulacji składa się
z poniższych, następujących po sobie i
współzależnych od siebie etapów, o różnych cechach i właściwościach:
9Regulacja pierwotna rozpoczyna działanie w ciągu sekund. Regulacja ta jest
nazywana regulacją sekundową.
9Regulacja wtórna zwana minutową zastępuje w ciągu minut regulację
pierwotną i jest uaktywniana przez odpowiedniego OSP.
9Regulacja trójna zwana godzinową uwalnia regulację wtórną poprzez zmianę
programu wytwarzania i jest uaktywniana przez odpowiednie OSP.
9Regulacja czasu koryguje całkowitą odchyłkę czasu dla czasu synchronicznego
w dłuższym przedziale czasu zgodnie z zasadą solidarnego współudziału
wszystkich przedsiębiorstw.
43
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
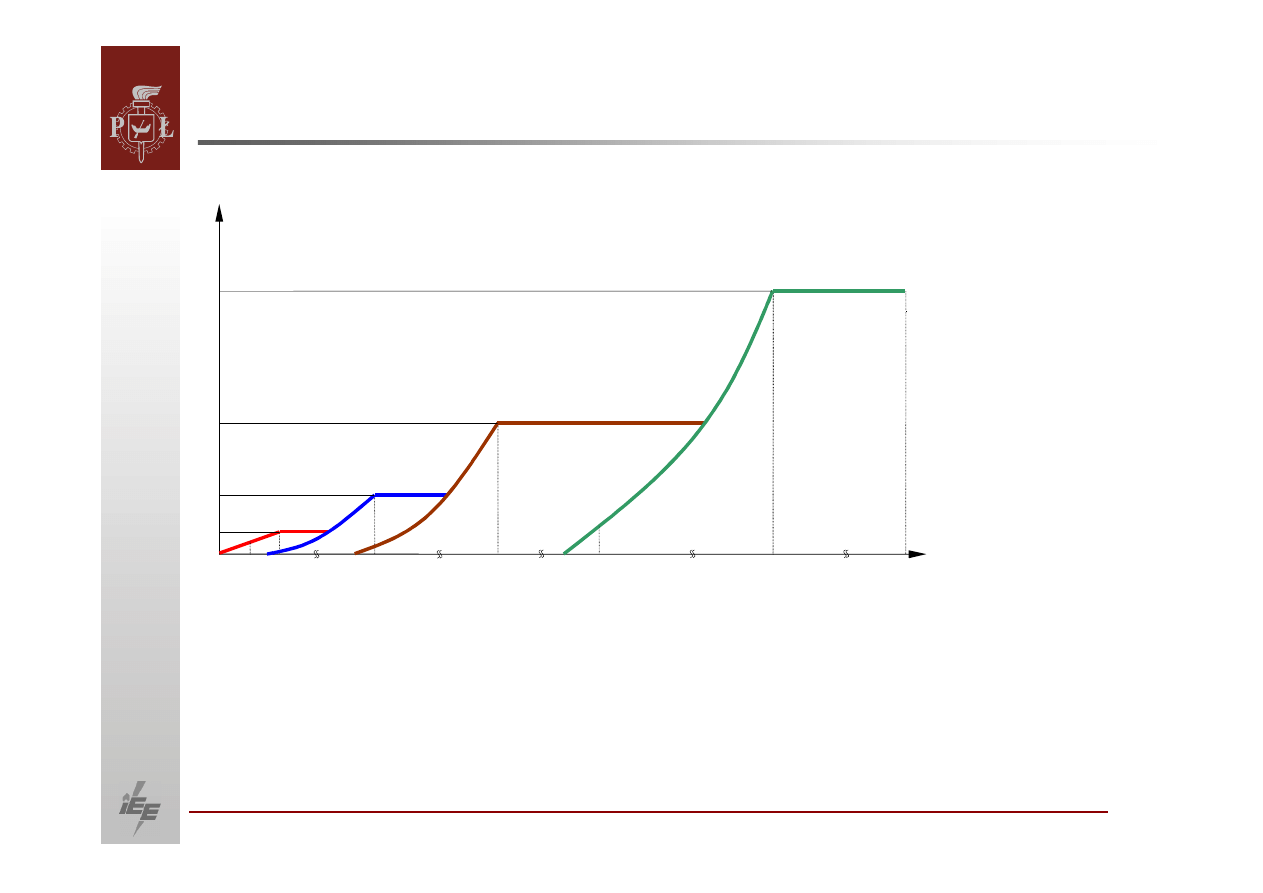
Etapy regulacji mocy czynnej systemu elektroenergetycznego.
P
t
24 h
8 h
1 h
15 min
4 h
30 s
15 s
rezerwa
sekundowa
rezerwa
minutowa
rezerwa godzinowa
rezerwa
odtworzeniowa
Zakłócenia pojawiające się
w systemie UCTE zostały zunifikowane następująco:
1.
Incydent odniesienia to maksymalne chwilowe odchylenie między
wytwarzaniem i
zapotrzebowaniem
w obszarze synchronicznym z powodu:
nagłej utraty mocy wytwarzanej, awaryjnego zrzutu obciążenia czy przerwy
w wymianie mocy.
44
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
2.
Incydent odniesienia w stanie pracy normalnej powinien być
zregulowany
przez regulację
pierwotną.
3.
Incydent odniesienia dla naszego obszaru synchronicznego wynosi 3000
MW.
4.
Incydent obserwowany to taki incydent, gdzie występuje nagła utrata
wytwarzania lub odbioru o mocy powyżej 1000 MW, który uważa się
za
istotny dla celów obserwacji zachowania systemów w danym obszarze
synchronicznym.
Wielkość
odchyłki częstotliwości:
1.
W warunkach pracy normalnej z częstotliwością
znamionową
lub blisko tej
wartości odchyłka częstotliwości nie powinna przekroczyć
. Jest to
suma dokładności pomiaru częstotliwości lokalnej oraz nieczułości
regulatora.
2.
Quasi‐stacjonarna odchyłka częstotliwości w obszarze synchronicznym nie
może przekroczyć
.
mHz
20
±
mHz
180
±
45
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
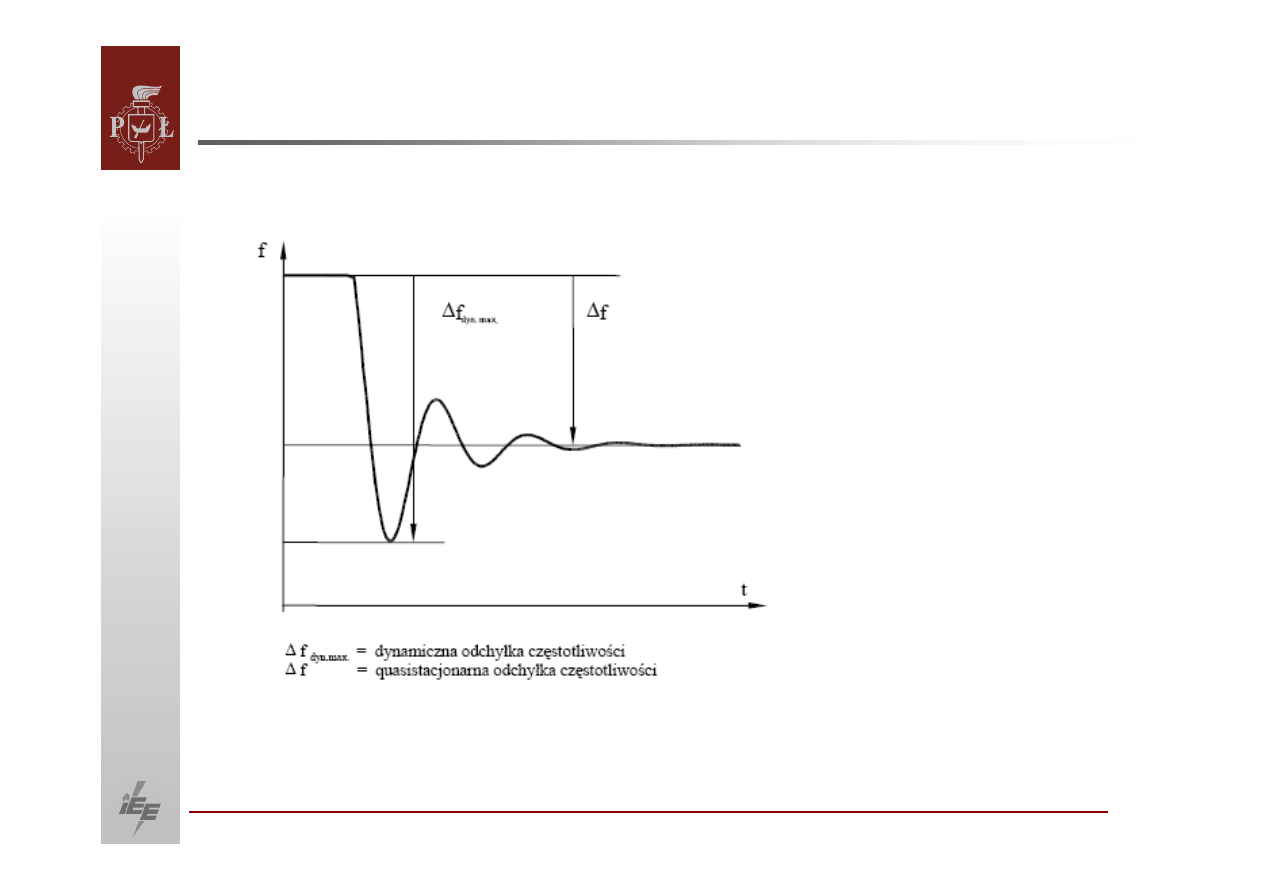
Quasi‐stacjonarna i dynamicznej odchyłka częstotliwości w obszarze
synchronicznym.
46
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
3.
W odpowiedzi na nagły ubytek wytwarzania o wielkości równej lub
mniejszej incydentowi odniesienia, częstotliwość
chwilowa nie może spaść
poniżej 49,2 Hz co odpowiada wartości jako maksymalnej
dopuszczalnej dynamicznej odchyłce częstotliwości od częstotliwości
znamionowej.
4.
Maksymalna częstotliwość
chwilowa to odpowiedź
na nagły ubytek
zapotrzebowania lub przerwy w wymianie mocy o wielkości równej lub
mniejszej incydentowi odniesienia, przy czym częstotliwość
chwilowa nie
może przekroczyć
wartości 50.8 Hz co odpowiada wartości jako
maksymalnej dopuszczalnej dynamicznej odchyłce częstotliwości od
częstotliwości znamionowej.
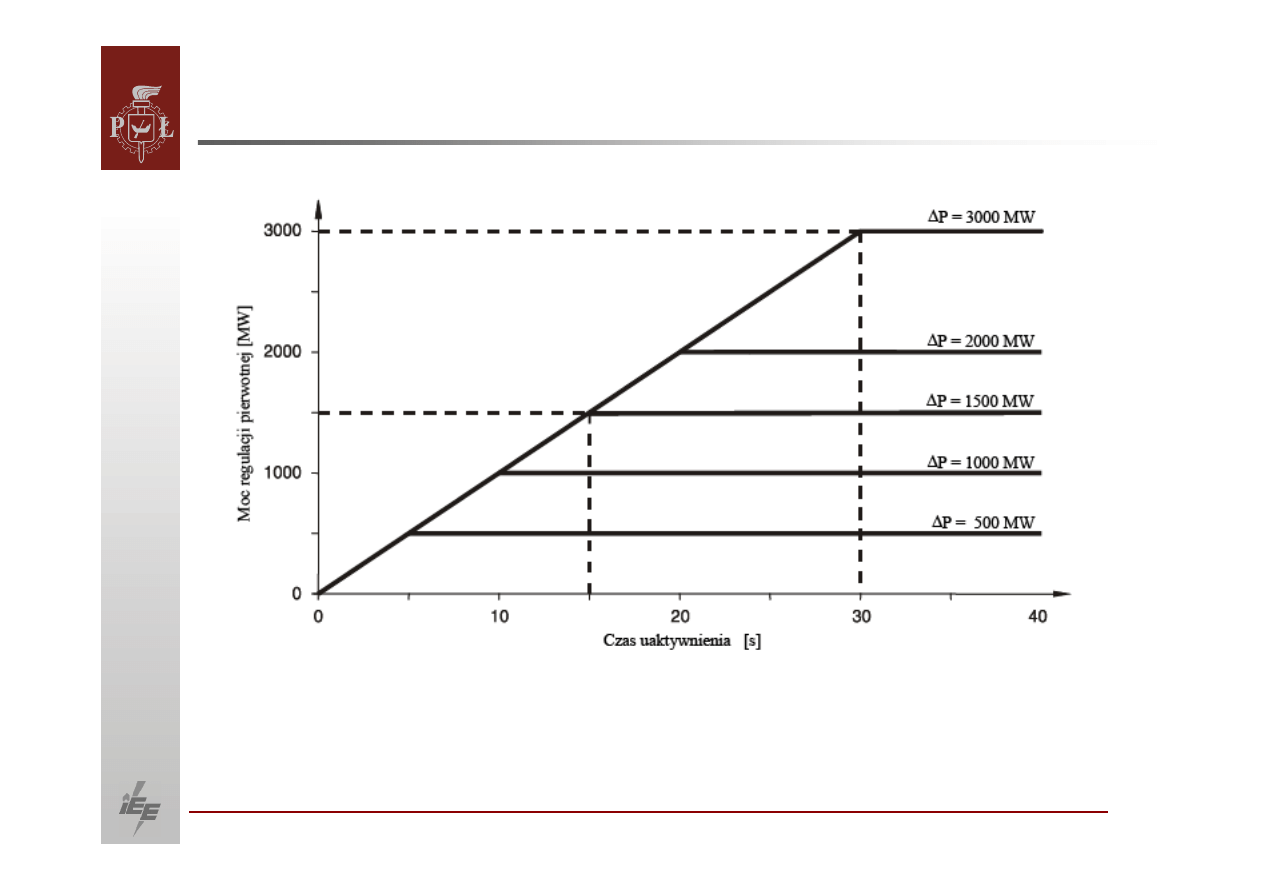
Czas uaktywnienia regulacji pierwotnej wynosi kilka sekund od momentu
wystąpienia zakłócenia, przy czym do 50% całkowitej rezerwy regulacji
pierwotnej musi być
uaktywnione w czasie najwyżej 15 sekund, a od 50% do
100% musi być
uaktywnione w narastającym liniowo maksymalnym czasie
do 30 sekund.
mHz
800
−
mHz
800
+
47
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
Czas uaktywnienia regulacji pierwotnej
Wymagania dotyczące dokładności pomiaru częstotliwości:
9Musi być większa lub równa 10 mHz.
9Zakres nieczułości regulatorów pierwotnych nie powinien przekraczać ±10.
mHz.
48
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
Rezerwa regulacji pierwotnej musi charakteryzować
się
pewnymi cechami:
9Generalnie rezerwa regulacji pierwotnej musi być rozmieszczona w
równomierny sposób pomiędzy różnymi obszarami regulacyjnymi w całym
obszarze synchronicznym.
9Całkowita rezerwa regulacji pierwotnej (w MW) wymagana dla pracy obszaru
synchronicznego ma tą samą wielkość, co incydent odniesienia dla tego
obszaru.
9Warunkiem koniecznym jest, aby całkowita rezerwa regulacji pierwotnej w
każdym obszarze była dostępna w sposób ciągły, nieprzerwany i niezależnie od
składu pracujących bloków.
9Całkowita wielkość rezerwy regulacji pierwotnej musi być w pełni
zaktywizowana w odpowiedzi na quasi‐stacjonarną odchyłkę częstotliwości w
wysokości ±200 mHz lub większą.
Każdy operator systemu przesyłowego (OSP) pracujący w połączeniu
synchronicznym musi uczestniczyć
w likwidacji zakłócenia zgodnie z
odpowiednim współczynnikiem udziału w regulacji pierwotnej a powyższe
stwierdzenie nazywane jest zasadą
solidaryzmu.
49
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
Współczynnik udziału dla każdego obszaru regulacyjnego:
Współczynnik udziału dla Polski wynosi obecnie około . W oparciu o
ten współczynnik wyznacza się
wielkość
rezerwy minimalnej mocy regulacji
pierwotnej:
Dla określenia warunków pracy regulacji pierwotnej przyjęto następujące
założenia:
9Nagłe odchylenie bilansu produkcji i zużycia o wielkość 3000 MW.
9Obciążenie systemu poza szczytem około 150 GW, w szczycie około 300 GW.
9Stała czasu uaktywnienia: 10 – 12 sekund.
9Efekt samoregulacji obciążenia: 1 %/Hz.
9Maksymalna dopuszczalna odchyłka częstotliwości:
•
quasi‐stacjonarna: ±180 mHz,
•
dynamiczna: ±800 mHz.
i
C
u
i
i
E
E
C
=
0606
,
0
≈
i
C
MW
182
0606
,
0
3000
=
⋅
=
PKSE
R
50
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
Ocena jakości
regulacji
Mocowo‐
częstotliwościowe
charakterystyki sieci
całego obszaru
synchronicznego
oblicza się
na
podstawie tzw.
podatności
systemowej
wyznaczanej z
następującej
zależności:
s
a
u
f
P
Δ
Δ
λ
=
2
20
10
f
f
f
s
+
=
Δ
51
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji pierwotnej
Podatność
systemowa zwana także energią
regulacyjną
dla systemu UCTE
określono na
co daje dla polskiego systemu elektroenergetycznego wartość
Hz
MW
18000
=
u
λ
Hz
MW
1091
0606
,
0
18000
=
⋅
=
uKSE
λ
52
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji wtórnej
Każde niezbilansowanie pomiędzy wytwarzaniem z zużyciem powoduje, że
zmienia się
częstotliwość
w całej sieci obszaru synchronicznego. W praktyce
obciążenie podlega ciągłym zmianom, nawet, jeśli nie popełniono błędów przy
prognozowaniu zapotrzebowania, stąd wymagana jest ciągła regulacja wtórna
w czasie rzeczywistym.
Odchyłka częstotliwości systemowej od wartości zadanej 50 Hz zaktywizuje
moc regulacji pierwotnej w całym obszarze synchronicznym.
Zadaniem regulacji wtórnej jest utrzymywanie lub odbudowywanie bilansu
mocy w danym obszarze regulacyjnym oraz w
konsekwencji
utrzymywanie lub
odbudowywanie częstotliwości systemowej do wartości zadanej 50
Hz a mocy
wymiany między sąsiadującymi obszarami regulacyjnymi do wartości
zaplanowanych, zapewniając w ten sposób ponowną
dostępność
całej rezerwy
mocy regulacji pierwotnej.
Podczas gdy w procesie regulacji pierwotnej wszystkie obszary regulacyjne
wspomagają
się
wzajemnie poprzez dostarczanie mocy regulacji pierwotnej, to
w przypadku regulacji wtórnej wymaga się, aby zadziałała ona tylko w tym
obszarze regulacyjnym, w którym pojawiło się
niezbilansowanie, w celu korekty
tego niezbilansowania.
53
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji wtórnej
Regulacja wtórna działa w okresach czasu rzędu minut i przez to jest rozłączna
czasowo od regulacji pierwotnej.
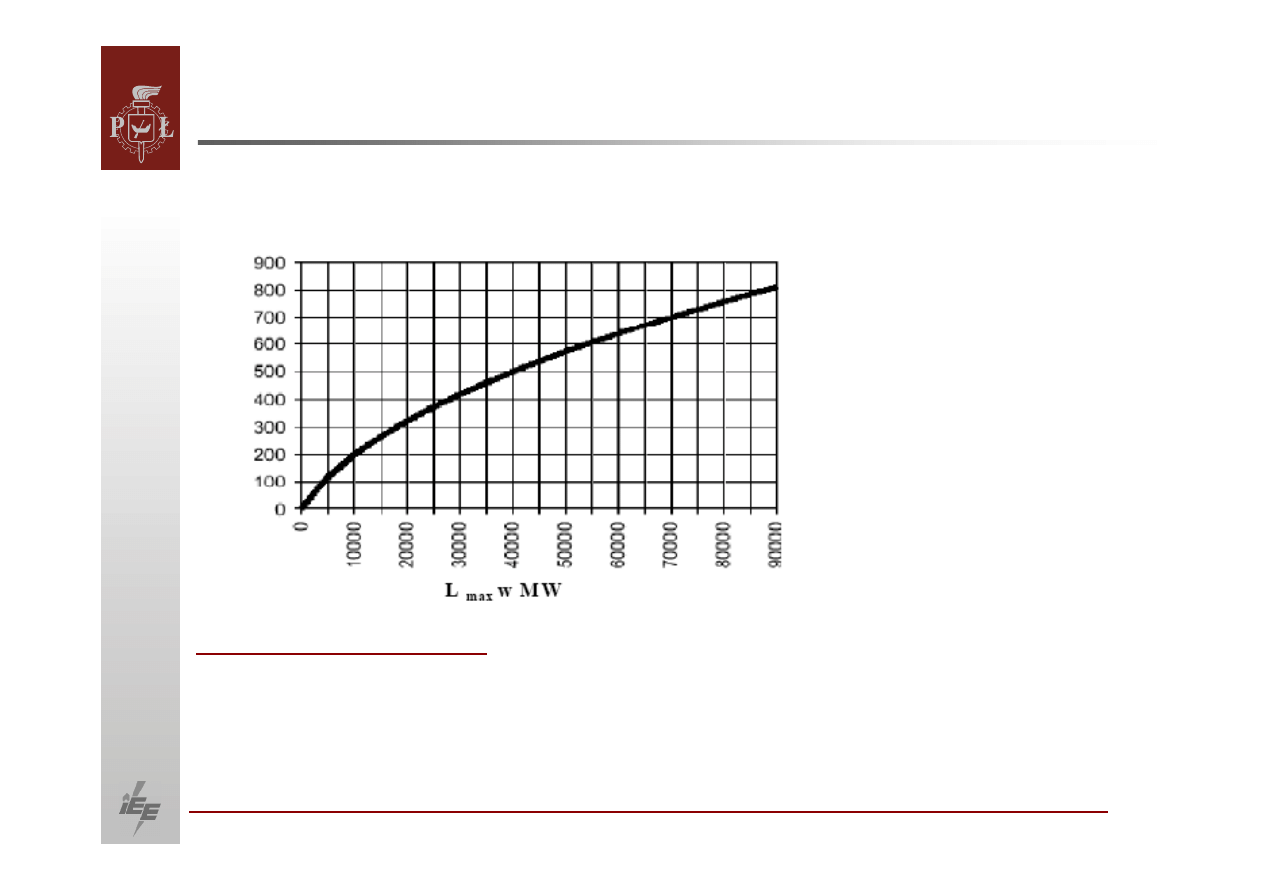
Zmiany obciążenia różnej wielkości muszą
być
skorygowane w czasie około 15
minut, niezależnie od wielkości danego obszaru regulacyjnego. W tym celu dla
danego obszaru regulacyjnego zalecana jest następująca minimalna wielkość
rezerwy regulacji wtórnej dla zmienności obciążenia:
W mniejszych obszarach regulacyjnych takich jak Polska należy wziąć
pod
uwagę
także moce znamionowe największego generatora, przy czym powinno
się
przyjmować, że wartość
rezerwy wtórnej powinna być
dwukrotnie większa
od mocy znamionowej największego generatora. Z tego warunku wynika
wartość
rezerwy wtórnej dla Polski wynosząca
b
b
L
a
R
−
+
⋅
=
2
max
MW
10
=
a
MW
150
=
b
MW
1000
500
2
=
⋅
=
WKSE
R
54
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji wtórnej
Zalecana minimalna wielkość
rezerwy wtórnej w funkcji mocy szczytowej
systemu.
Jakość
regulacji wtórnej
Jakość
regulacji wtórnej musi być
monitorowana poprzez pomiary i analizę
działania regulacji poszczególnych obszarów regulacyjnych po nagłej utracie
wytwarzania lub odbioru powyżej 1000
MW (incydent obserwowany).
55
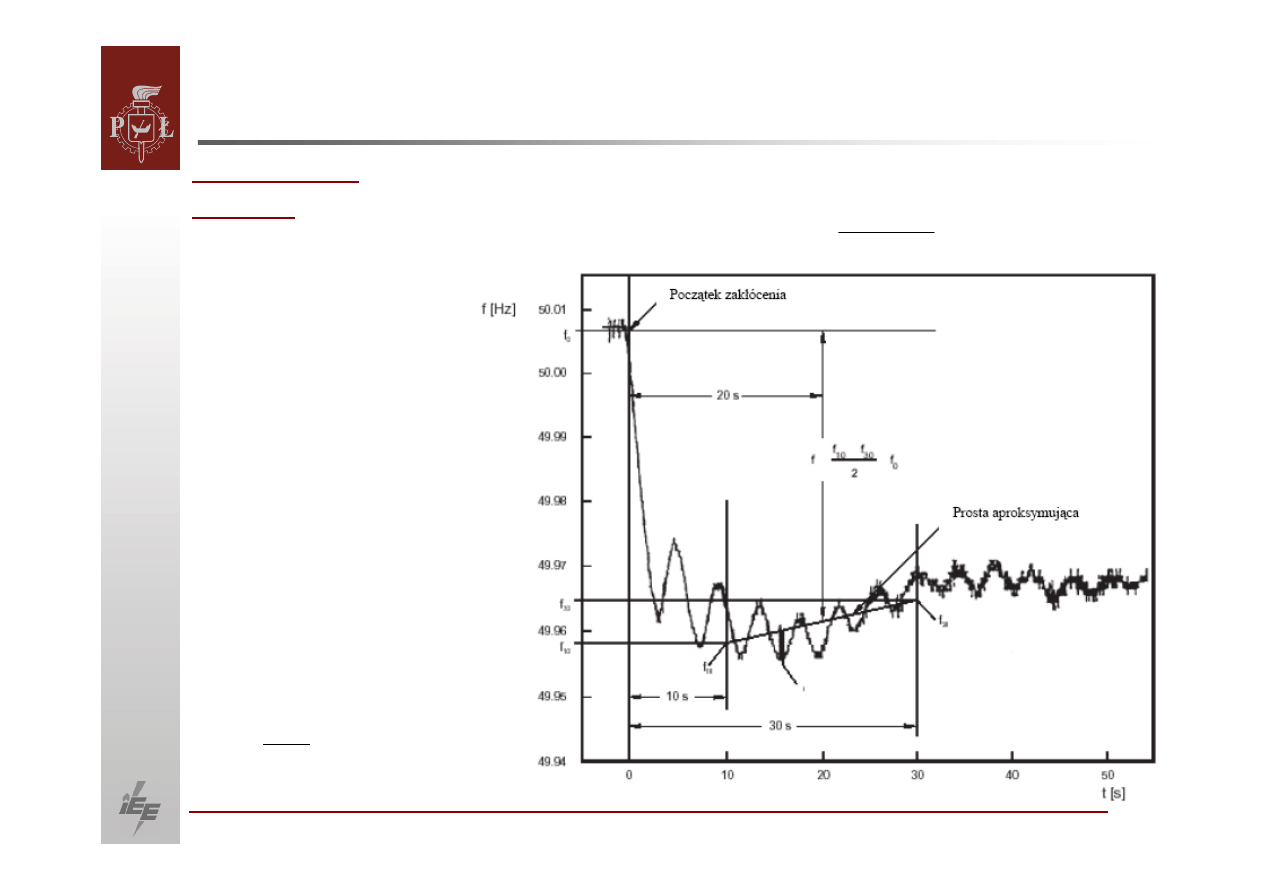
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji wtórnej
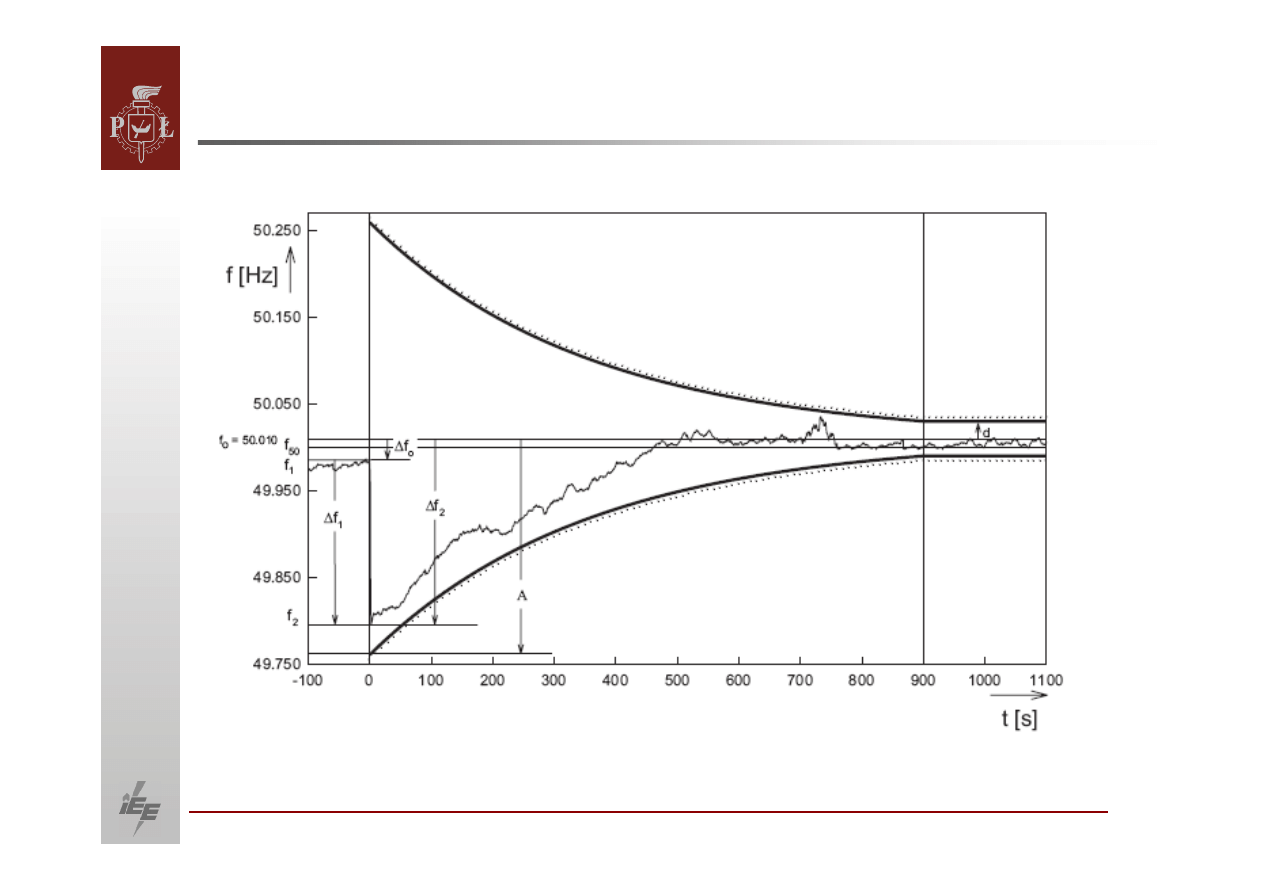
Reakcja czy też
odpowiedź
obszaru synchronicznego na duże zakłócenie w
danym obszarze regulacyjnym oraz powrót częstotliwości systemowej do jej
wartości początkowej (jakość
regulacji wtórnej) monitorowane są
przy pomocy
opisanej poniżej „metody trąbkowej”. Na podstawie doświadczeń
oraz
wieloletniej obserwacji częstotliwości systemowej zdefiniowane zostały
odpowiednie obwiednie tzw. krzywe trąbkowe o przebiegu wykorzystywane w
celu oceny jakości regulacji wtórnej obszarów regulacyjnych postaci:
Częstotliwość
systemowa musi zostać
przywrócona do wartości zadanej z
dokładnością
20 mHz
w ciągu 900 sekund (15 minut) po wystąpieniu
zakłócenia.
( )
T
t
e
A
f
t
H
−
⋅
±
=
0
2
2
,
1
f
A
Δ
⋅
=
⎟
⎠
⎞
⎜
⎝
⎛
=
d
A
T
ln
900
mHz
20
±
=
d
56
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji wtórnej
Krzywa trąbkowa dla założonego zakłócenia
57
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji wtórnej
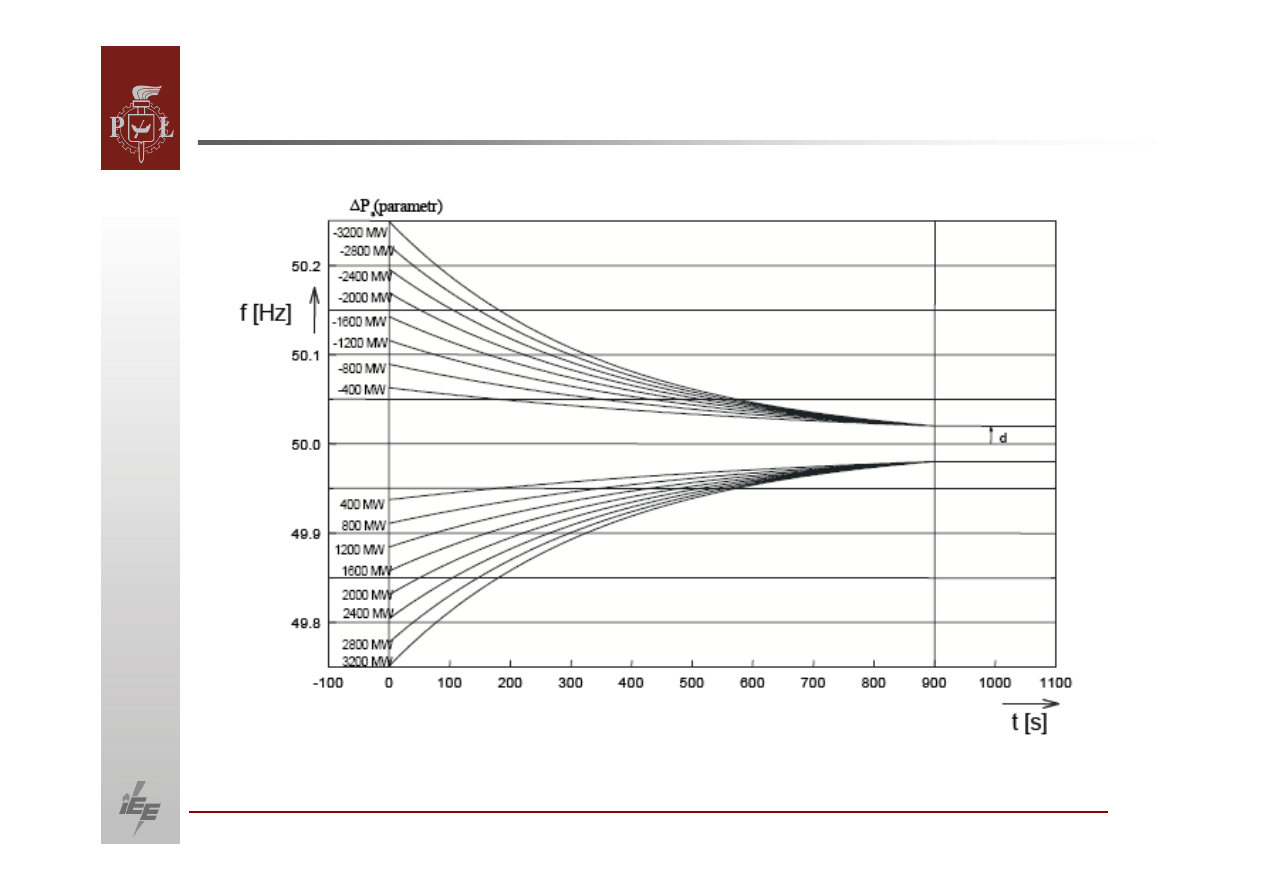
Rodzina krzywych trąbkowych dla różnych zakłóceń
58
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji trójnej
Regulacja trójna jest to automatyczna lub ręczna zmiana punktu pracy
uczestniczących w niej generatorów lub obciążenia, w celu:
9Zagwarantowania dostarczenia odpowiedniej wielkości rezerwy regulacji
wtórnej we właściwym czasie.
9Możliwie najlepszego, ze względów ekonomicznych, rozdziału mocy regulacji
wtórnej między poszczególne generatory.
Zmiana ta może być
osiągnięta poprzez:
9Załączenie lub odłączenie generatorów (turbin gazowych, elektrowni
zbiornikowych i szczytowo‐pompowych, zwiększenie lub zmniejszenie mocy
generatorów w ruchu).
9Zmianę rozdziału obciążenia generatorów uczestniczących w regulacji
wtórnej.
9Zmianę planu mocy wymiany między pracującymi synchronicznie
przedsiębiorstwami.
9Sterowanie obciążeniem (na przykład kontrolowany awaryjny zrzut
obciążenia).
59
REGULACJA CZĘSTOTLIWOŚCI
Wymagania dla regulacji czasu
Średnia częstotliwość
systemowa w obszarze synchronicznym może różnić
się
od częstotliwości znamionowej 50 Hz, to skutkiem jest rozbieżność
między
czasem synchronicznym a
czasem
uniwersalnym.
To przesunięcie czasu służy jako wskaźnik jakości regulacji pierwotnej, wtórnej,
trójnej
i nie może przekraczać
30 sekund. Za obliczanie czasu synchronicznego
oraz organizację
korekty czasu odpowiedzialne jest centrum regulacyjne w
Laufenburgu
w
Szwajcarii.
Korekta polega na ustawieniu we wszystkich obszarach regulacyjnych wartości
zadanej częstotliwości dla regulacji wtórnej na poziomie 49.99 Hz lub 50.01 Hz.
Jakość
częstotliwości systemowej będzie uważana za zadowalającą
w okresie
jednego miesiąca, jeśli:
9Odchylenie standardowe dla 90% i 99% przedziałów pomiarowych jest
mniejsza niż odpowiednio 40 mHz i 60 mHz w danym miesiącu dla całego
miesięcznego okresu.
9Liczba dni pracy z częstotliwością zadaną 49.99 Hz lub 50.01 Hz nie
przekracza ośmiu.
60
REGULACJA CZĘSTOTLIWOŚCI
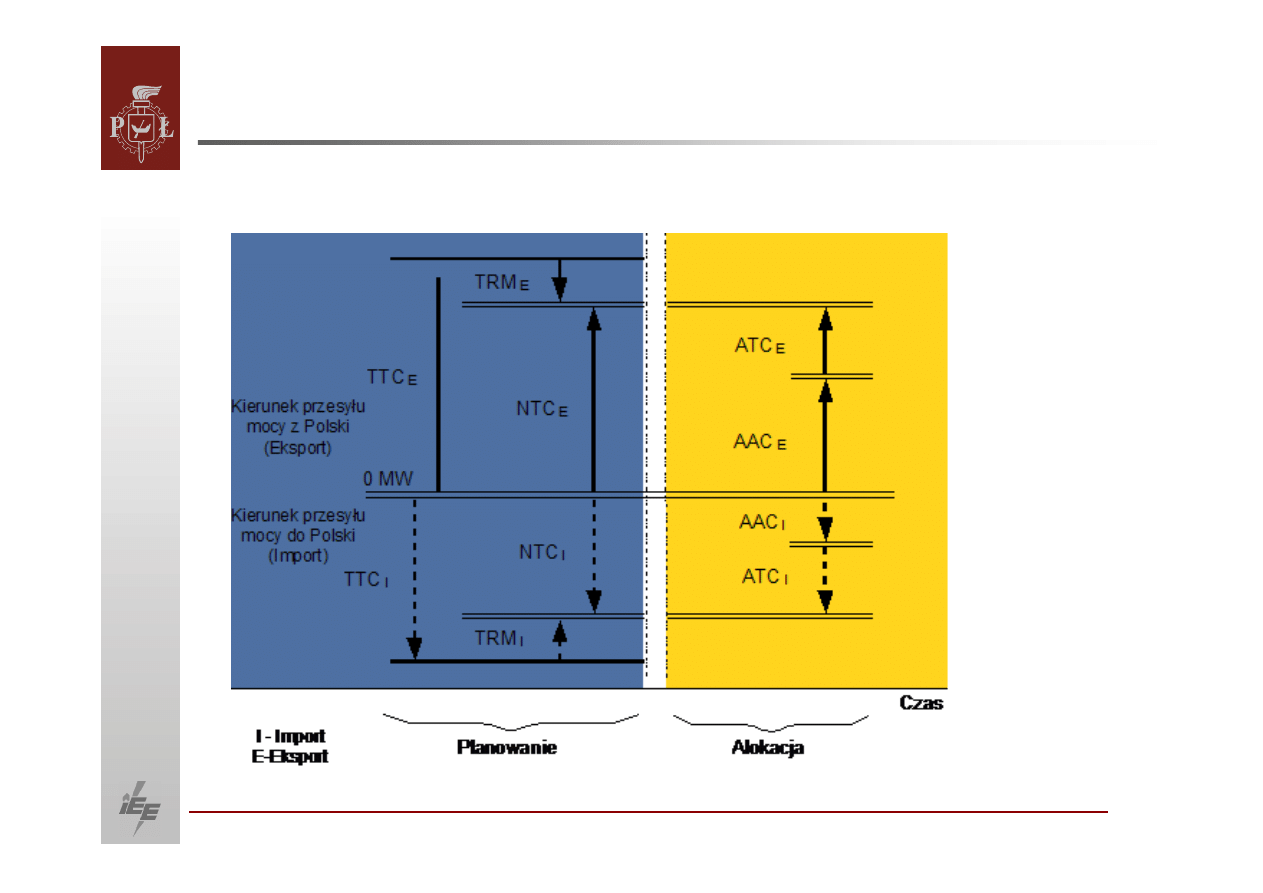
Zdolności przesyłowe wymiany międzysystemowej
Definicje dla określenia zdolności przesyłowe wymiany międzysystemowej:
9Całkowite Zdolności Przesyłowe (ang. Total Transfer Capacity TTC)
określane są jako maksymalna dopuszczalna wartość mocy wymiany
międzysystemowej pomiędzy przyległymi obszarami wyznaczona zgodnie z
obowiązującymi w każdym z nich kryteriami bezpieczeństwa.
9Margines Bezpieczeństwa Przesyłu (ang. Transmission Reliability Margin
TRM) stanowi rezerwę zdolności przesyłowych utrzymywaną ze względu na
możliwe zdarzenia losowe i niepewność danych wykorzystanych dla
wyznaczenia wartości TTC. Margines Bezpieczeństwa Przesyłu jest wielkością
zdolności przesyłowych, która może być wykorzystana jedynie w sytuacjach
awaryjnych lub dla realizacji krótkotrwałych działań regulacyjnych.
9Zdolności Przesyłowe Netto (ang. Net Transfer Capacity NTC) określają
maksymalne dopuszczalne zdolności wymiany mocy pomiędzy dwoma
obszarami, realizowane zgodnie z wszystkimi standardami bezpieczeństwa
systemu określonymi przez każdego operatora z uwzględnieniem niezbędnego
marginesu bezpieczeństwa. Wielkość NTC definiowana jest jako:
TRM
NTC
TTC
+
=
61
REGULACJA CZĘSTOTLIWOŚCI
Zdolności przesyłowe wymiany międzysystemowej
9Pierwotnie Przydzielone Zdolności Przesyłowe (ang. Already Allocated
Capacity AAC) to wielkość zarezerwowanych zdolności przesyłowych w ramach
historycznych kontraktów długoterminowych oraz wcześniej
przeprowadzonych przetargów na rezerwację zdolności przesyłowych. Jako
zarezerwowane zdolności przesyłowe w ramach kontraktów historycznych
należy przyjąć potwierdzone przez ich posiadacza maksymalne możliwe
wartości mocy w grafikach dostaw. Dopuszcza się uwzględnienie
potwierdzonych minimalnych wartości mocy w grafikach dostaw w ramach
historycznych kontraktów długoterminowych dla zmniejszenia wartości AAC w
przeciwnym kierunku wymiany.
Dostępne Zdolności Przesyłowe (ang. Available
Transfer Capacity
ATC) to
miara zdolności przesyłowych pozostających do wykorzystania w warunkach
fizycznych systemu przesyłowego. Wielkość
ATC określana jest równaniem:
AAC
ATC
NTC
+
=
62
REGULACJA CZĘSTOTLIWOŚCI
Zdolności przesyłowe wymiany międzysystemowej
Wielkości używane podczas określenia zdolności przesyłowych wymiany
międzysystemowej
63
REGULACJA CZĘSTOTLIWOŚCI
Bezpieczeństwo ruchowe systemu elektroenergetycznego
Kryterium:
9 (N‐1),
9 (N‐2),
9 (N‐1‐1).
Document Outline
- SYSTEMY ELEKTROENERGETYCZNE Rozdział 6 REGULACJA CZĘSTOTLIWOŚCI
- REGULACJA CZĘSTOTLIWOŚCI Wstęp
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według mocy synchronizujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według mocy synchronizujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według mocy synchronizujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według mocy synchronizujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według mocy synchronizujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według energii kinetycznych mas wirujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według energii kinetycznych mas wirujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według energii kinetycznych mas wirujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według energii kinetycznych mas wirujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według energii kinetycznych mas wirujących
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Rozdział według charakterystyk regulatorów pierwotnych turbin
- REGULACJA CZĘSTOTLIWOŚCI Lawina częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Lawina częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Lawina częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Działanie regulatora wtórnego systemu
- REGULACJA CZĘSTOTLIWOŚCI Działanie regulatora wtórnego systemu
- REGULACJA CZĘSTOTLIWOŚCI Działanie regulatora wtórnego systemu
- REGULACJA CZĘSTOTLIWOŚCI Obrona systemu elektroenergetycznego przy wahaniach częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Obrona systemu elektroenergetycznego przy wahaniach częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Obrona systemu elektroenergetycznego przy wahaniach częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Obrona systemu elektroenergetycznego przy wahaniach częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Obrona systemu elektroenergetycznego przy wahaniach częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Obrona systemu elektroenergetycznego przy wahaniach częstotliwości
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji pierwotnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji wtórnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji wtórnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji wtórnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji wtórnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji wtórnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji wtórnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji trójnej
- REGULACJA CZĘSTOTLIWOŚCI Wymagania dla regulacji czasu
- REGULACJA CZĘSTOTLIWOŚCI Zdolności przesyłowe wymiany międzysystemowej
- REGULACJA CZĘSTOTLIWOŚCI Zdolności przesyłowe wymiany międzysystemowej
- REGULACJA CZĘSTOTLIWOŚCI Zdolności przesyłowe wymiany międzysystemowej
- REGULACJA CZĘSTOTLIWOŚCI Bezpieczeństwo ruchowe systemu elektroenergetycznego
Wyszukiwarka
Podobne podstrony:
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdzial 5 id 2 Nieznany
Kanicki Systemy Rozdzial 3 id 2 Nieznany
Kanicki Systemy Rozdział 2
Kanicki Systemy Rozdział 7
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdzial 10 id Nieznany
Kanicki Systemy Rozdział 4
Kanicki Systemy Rozdział 3
Kanicki Systemy Rozdział 5
Obowiązki i uprawnienia operatora systemu rozdzielczego w świetle obowiązujących postanowień Prawa e
rozdzial 1 system?nkowy i?nki ok
rozdział v funkcja systemu szkolnego w procesach reprodukcji społecznej wg szcepańskiego OTRVY22YB
więcej podobnych podstron