
Projekt „Program Rozwojowy Potencjału Dydaktycznego Politechniki Świętokrzyskiej w Kielcach: kształcenie na miarę sukcesu”
Program Operacyjny Kapitał Ludzki Priorytet IV Działanie 4.1 Poddziałanie 4.1.1
Umowa UDA-POKL.04.01.01-00-175/08-02
Politechnika Świętokrzyska
25-314 Kielce
Al. Tysiąclecia Państwa Polskiego 7
Biuro Projektu - bud. B pok. 324
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Maszyny elektryczne – wykład multimedialny
Część III
Autorzy:
Prof. dr hab. inż. Roman Nadolski
Dr inż. Jan Staszak
Dr inż. Krzysztof Ludwinek
Mgr inż. Zbigniew Gawęcki
Lata realizacji 2008-2011
SPIS TREŚCI
3 Maszyny indukcyjne asynchroniczne
3.1 Budowa maszyny indukcyjnej
3.3 Schemat zastępczy i wykres wskazowy
3.4 Podstawowe stany pracy maszyny indukcyjnej
3.5 Moment elektromagnetyczny, charakterystyka mechaniczna silnika
3.6 Regulacja prędkości obrotowej silników indukcyjnych
3.6.1 Regulacja napięcia poprzez zmianę częstotliwości
3.6.2 Regulacja prędkości przez zmianę liczby par biegunów
3.6.3 Regulacja prędkości obrotowej przez zmianę poślizgu
3.7 Rozruch silników indukcyjnych
3.1 BUDOWA MASZYNY INDUKCYJNEJ
Maszyny indukcyjne mają prostą budowę i w związku z tym charakteryzują się wysoką
pewnością ruchową, łatwością obsługi i niską ceną, Najczęściej maszyny indukcyjne pracują
jako silniki, hamulce elektryczne, rzadziej jako prądnice.
Maszyna indukcyjna składa się z następujących podstawowych części:
ze stojana stanowiącego część nieruchomą, w kształcie wydrążonego walca,
z wirnika, czyli części ruchomej (wirującej) w kształcie walca,
elementów konstrukcyjnych stanowiących obudowę maszyny i umożliwiających ruch
obrotowy wirnika i zapewniających odpowiednie chłodzenie maszyny i ochronę przed
działaniem czynników zewnętrznych (pył, wilgoć itp.)
Pomiędzy częścią nieruchomą a wirującą znajduje się szczelina powietrzna o wielości
zależnej od gabarytów maszyny (od dziesiątych milimetra do kilku milimetrów). Szczelina
między stojanem a wirnikiem powinna być ze względów elektromagnetycznych jak
najmniejsza, gdyż wtedy jest mały prąd biegu jałowego. Ze względów mechanicznych
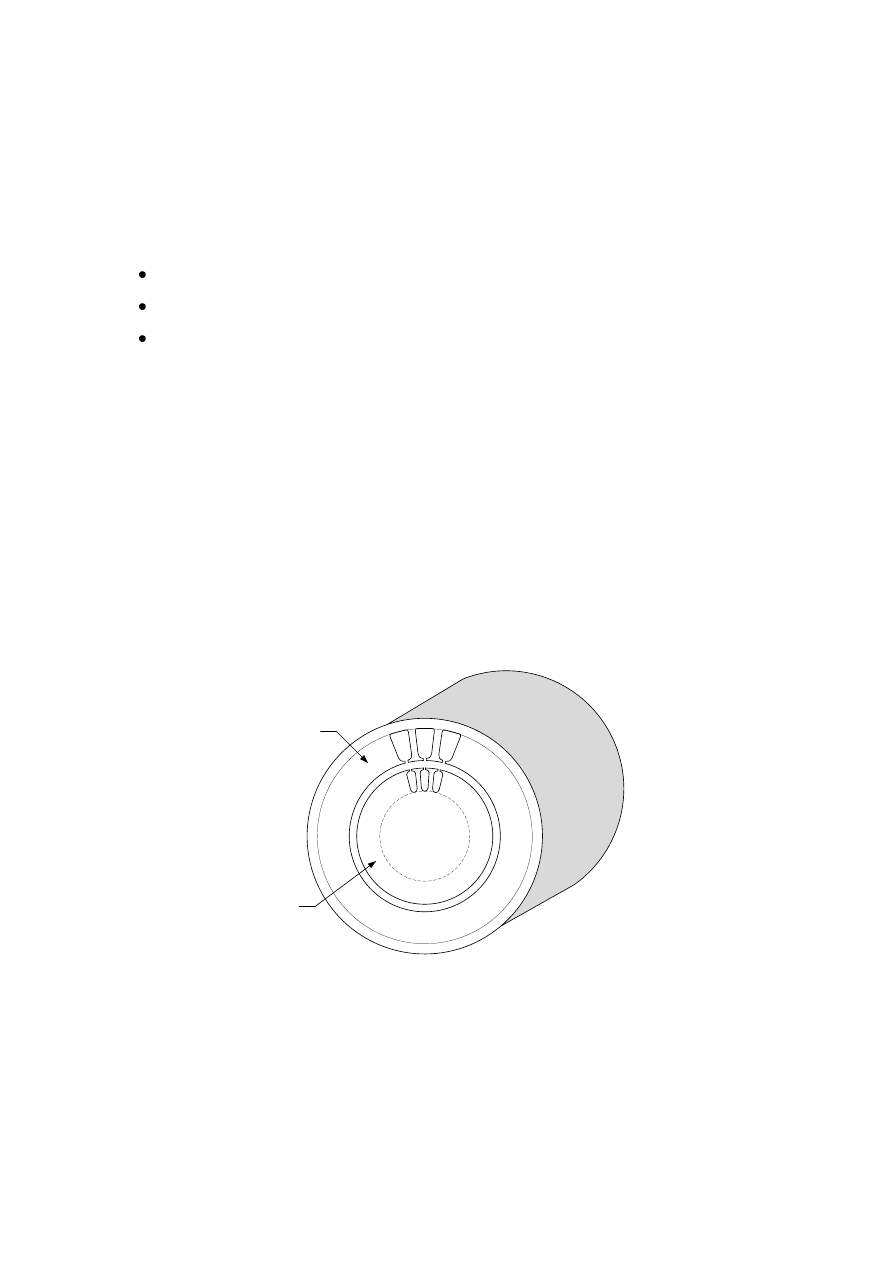
minimalna szczelina powietrzna wynosi 0,2 mm. Obwody magnetyczne stojana i wirnika
(rys 3.1.) wykonuje się z izolowanych blach elektrotechnicznych, zazwyczaj o grubości
0.5mm, natomiast wirniki dużych maszyn indukcyjnych wykonuje się z blach o większej
grubości.
1
2
Rys 3.1. Schemat budowy obwodu magnetycznego maszyny indukcyjnej: 1-wirnik, 2-stojan.
Na wewnętrznej stronie pakietu blach stojana i zewnętrznej stronie pakietu blach wirnika
wykonane są specjalne rowki zwane żłobkami (rys 3.2.) w których umieszczane są uzwojenia.
Liczba żłobków stojana i wirnika powinna być różna. Elementy obwodu magnetycznego
między żłobkami nazywane są zębami. Żłobki i zęby mogą mieć różne kształty. W małych
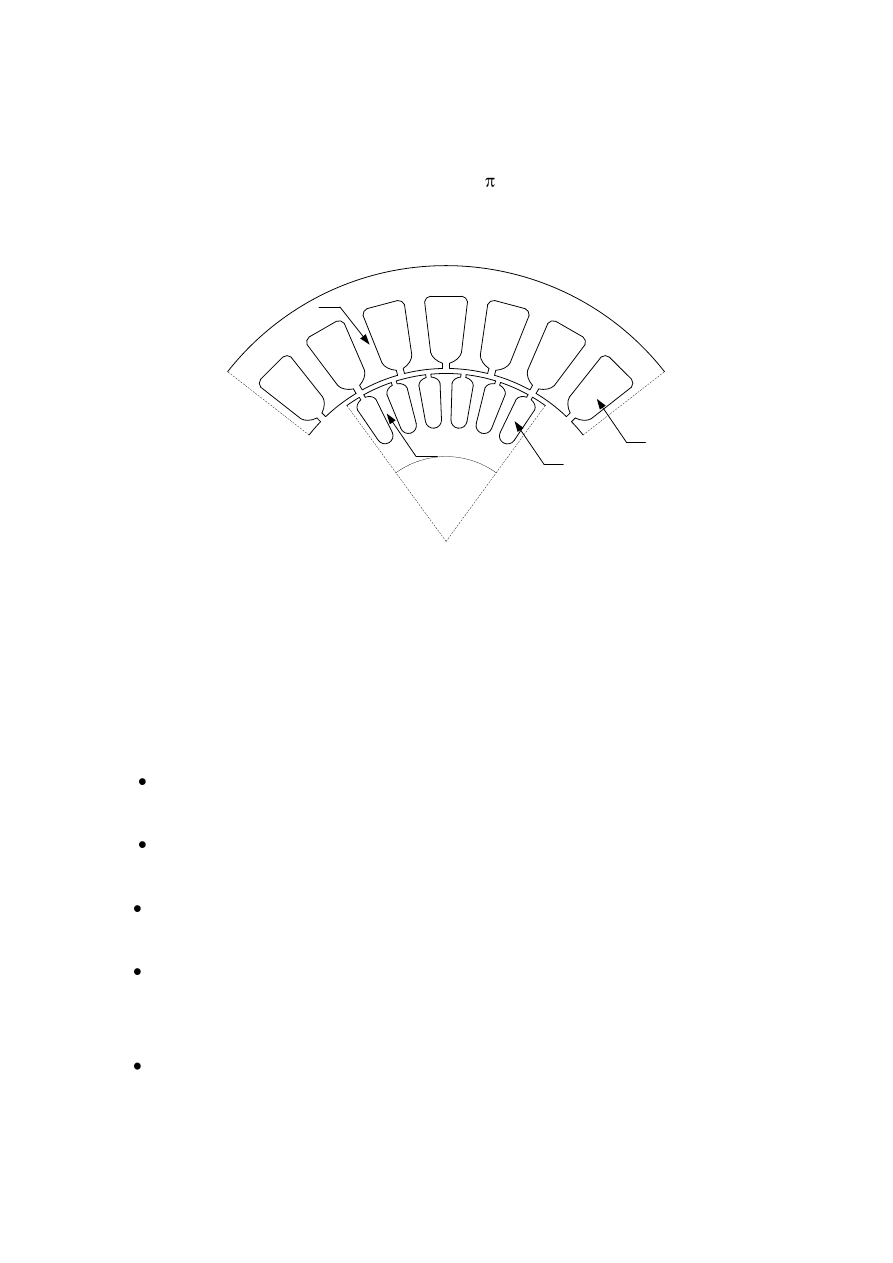
i średnich mocy kształt zębów jest prostokątny. W żłobkach stojana umieszczone jest
trójpasmowe uzwojenie wykonane z cewek z drutu nawojowego. Odległość między
początkami pasm uzwojeń trójfazowych wynosi 2/3 elektrycznych. Kąt mechaniczny będzie
p razy mniejszy, gdzie p jest liczbą par biegunów.
1
1
2
2
Rys 3.2. Wykrój blach stojana i wirnika Schemat budowy obwodu magnetycznego maszyny
indukcyjnej: 1-żłobek, 2-ząb.
W celu poprawienia oddawania ciepła z obwodu elektrycznego i magnetycznego silniki
indukcyjne wyposażone są w wentylatory, których zadaniem jest spowodowanie
intensywnego przepływu powietrza chłodzącego.
Ze względu na sposób uzwojenia stojana wśród silników indukcyjnych można wyróżnić:
silniki trójfazowe, najczęściej stosowane o trzech uzwojeniach fazowych
umieszczonych w stojanie, skojarzonych w gwiazdę lub trójkąt,
silniki jednofazowe, zwykle mniejszych mocy o jednofazowym uzwojeniu
umieszczonym w stojanie,
silniki dwufazowe o dwufazowym uzwojeniu stojana.
Ze względu na budowę wirnika silniki indukcyjne można podzielić na:
silniki klatkowe z wirnikiem tzw. zwartym, w których pręty wirnika połączone są
pierścieniami i tworzą pewnego rodzaju klatkę, pręty i pierścienie zwierające
wykonywane są zazwyczaj z aluminium, są to najpowszechniej stosowane silniki,
silniki pierścieniowe w których istnieje możliwość dołączania dodatkowych rezystancji
(np. w trakcie rozruchu) w obwód uzwojonego wirnika poprzez pierścienie ślizgowe
i szczotki.
a)
U
V
W
Stojan
Wirnik
b)
U
V
W
Stojan
Wirnik
R
d
P
Rys 3.3. Schemat obwodu elektrycznego silnika indukcyjnego: a) klatkowego, b) pierścieniowego:
R
d
- rezystancja dodatkowa, P- pierścienie ślizgowe.
Rys 3.4. Widok typowego silnika klatkowego.
W grupie silników klatkowych można wyróżnić:
silniki z wirnikami jednoklatkowymi – pojedyncze uzwojenie w postaci prętów
zwarte pierścieniami (najpowszechniej stosowane),
silniki z wirnikami dwuklatkowymi – dwa uzwojenia z jednakową liczbą prętów
zwarte poprzez pierścienie (tworzą podwójną klatkę, pozwalającą uzyskać odpowiedni
poziom momentu rozruchowego),
silniki głębokożłobkowe – pojedyncze uzwojenie w postaci prętów sięgających w głąb
wirnika zwartych pierścieniami (wykorzystane zjawisko wypierania prądu do
uzyskania odpowiedniej wartości momentu rozruchowego).
a)
b)
c)
Rys 3.5. Kształt żłobków silnika klatkowego: a) żłobek silnika jednoklatkowego, b) żłobek silnika
dwuklatkowego, c) żłobek silnika głęboko żłobkowego.
Ze względu na rodzaj ruchu maszyny indukcyjne można podzielić na:
maszyny o ruchu wirującym,
maszyny o ruchu liniowym.
3.2 ZASADA DZIAŁANIA
Uzwojenie trójfazowe stojana, wytwarzanie pola wirującego
Pojedyncze pasmo uzwojenia trójfazowego zasilane prądem przemiennym sinusoidalnym
wytwarza pole pulsujące o częstotliwości równej częstotliwości prądu przemiennego.
Kierunek tego pola jest zawsze zgodny z osią magnetyczną uzwojenia danej fazy. Oś
magnetyczna uzwojenia jest to oś prostopadła do płaszczyzny cewki tego uzwojenia. Zwrot
pola magnetycznego będzie zależny od wartości chwilowej prądu płynącego przez uzwojenie;
przy wartości dodatniej prądu zwrot pola będzie zgodny z osią magnetyczną dodatnią, przy
wartości ujemnej prądu pole magnetyczne będzie mieć zwrot przeciwny do osi dodatniej
uzwojenia. Pole magnetyczne wyznaczamy z prawa. Przy pominięciu spadków napięć
magnetycznych w rdzeniu stojana i wirnika możemy napisać
s
s
N
i
B
2
2
0
0
(3.1)
gdzie: B – indukcja magnetyczna w szczelinie powietrznej,
– długość szczeliny
powietrznej, i
s
– wartość chwilowa prądu płynącego w uzwojeniu, N
s
– liczba zwojów
szeregowych uzwojenia jednej fazy
Z zależności (3.1) wynika, że rozkład pola magnetycznego, przy jednakowej długości
szczeliny powietrznej, jest zależny od rozkładu przepływu. Kierunek przepływu będzie
zawsze zgodny z osią magnetyczną uzwojenia a jego zwrot zależny od wartości chwilowej
prądu. Wartość chwilową prądu określamy na podstawie wykresów wskazowych prądów
fazowych. Rzut wskazu prądu fazowego na oś czasu przedstawia wartość chwilową prądu.
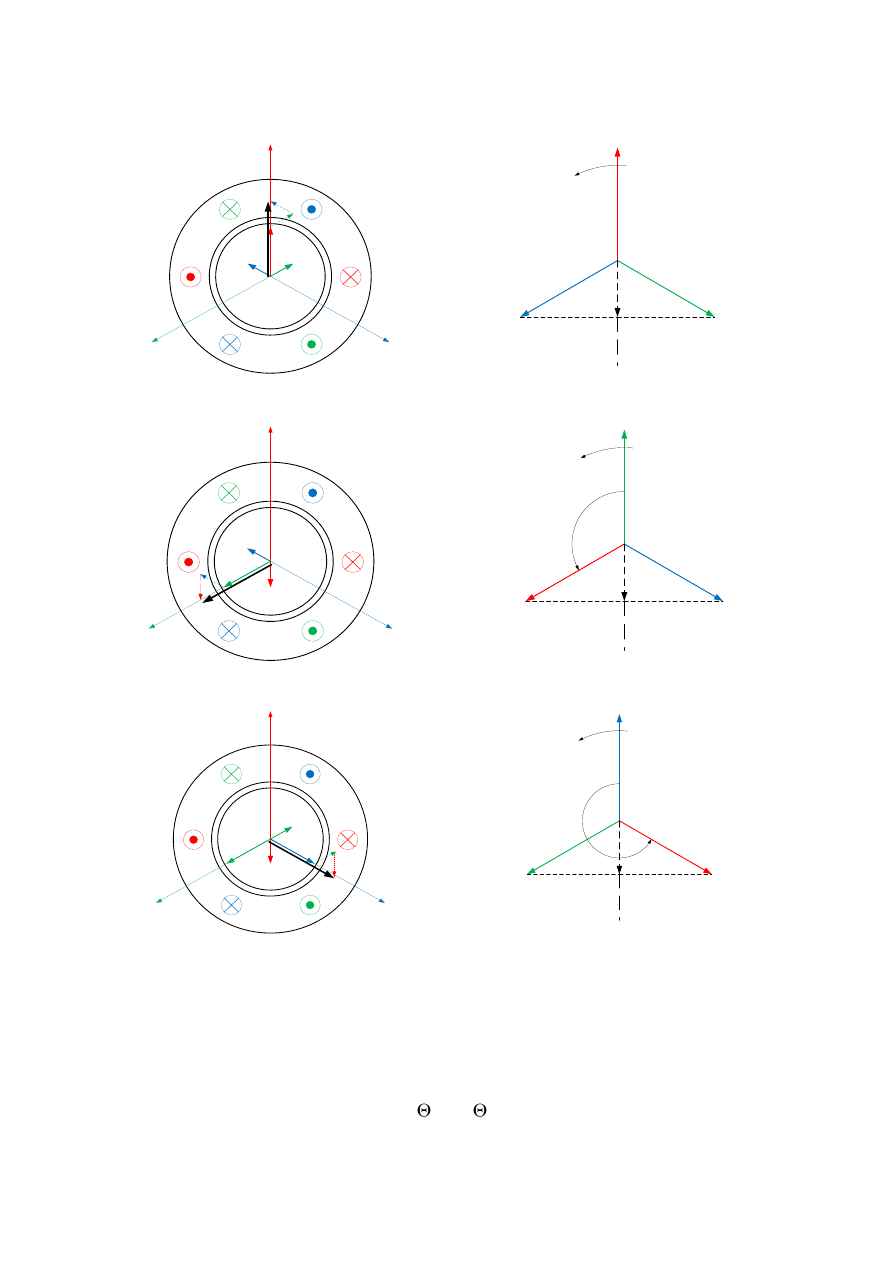
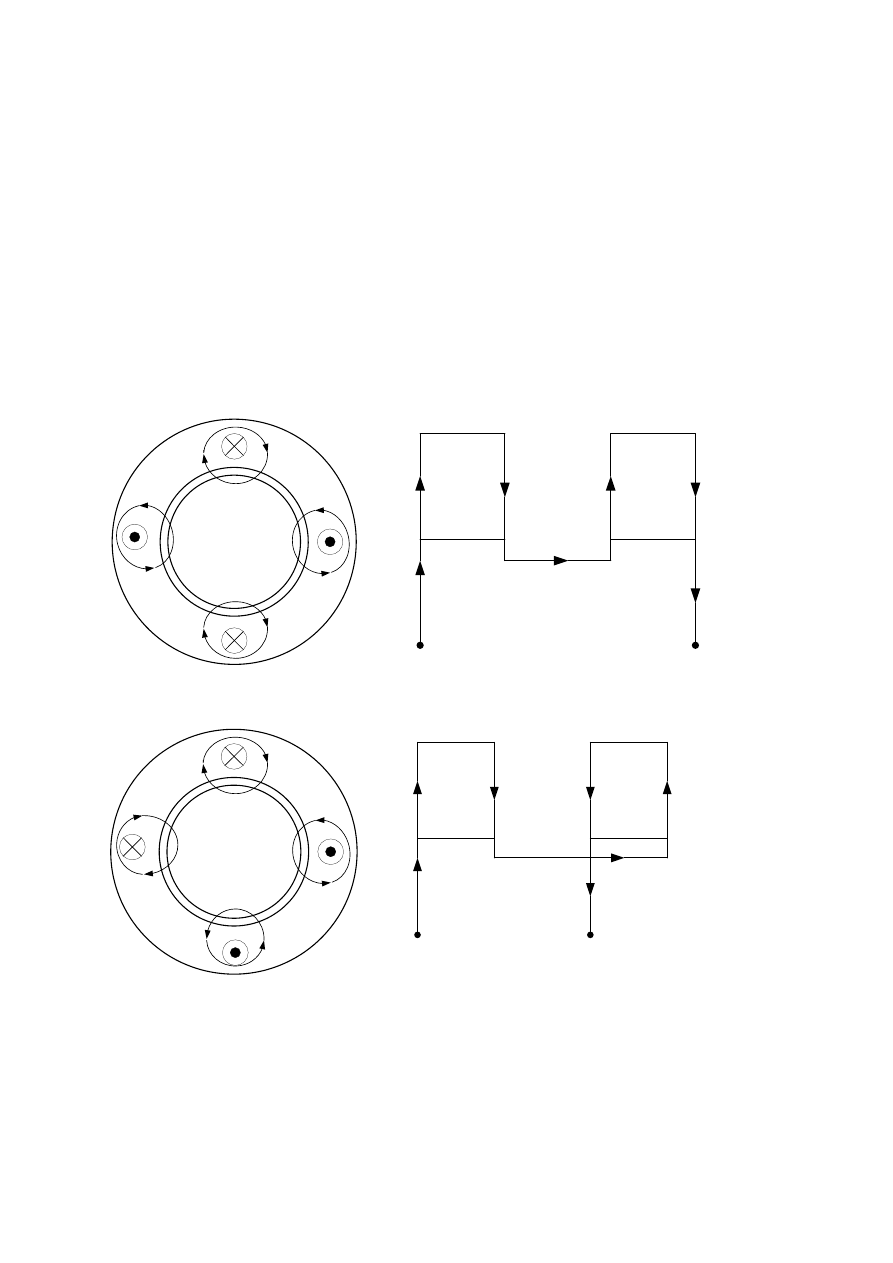
Zasadę powstawania pola magnetycznego wirującego wytworzonego przez uzwojenie
trójfazowe ilustruje rys.3.6.
a)
U
V
W
W1
W2
V2
U2
V1
U1
Θ
U
Θ
V
Θ
W
Θ
O
ś
cz
as
u
I
U
=I
m
I
V
I
W
I
V
=I
W
= ─0.5I
m
ω
s
b)
U
V
W
W1
W2
V2
U2
V1
U1
Θ
U
Θ
V
Θ
W
Θ
O
ś
cz
as
u
I
V
=I
m
I
W
I
U
I
U
=I
W
= ─0.5I
m
ω
s
α=ω
s
t=120°e
c)
U
V
W
W1
W2
V2
U2
V1
U1
Θ
U
Θ
V
Θ
W
Θ
O
ś
cz
as
u
I
W
=I
m
I
U
I
V
I
U
=I
V
= ─0.5I
m
ω
s
α=ω
s
t=240°e
Rys.3.6. Wirujące pole magnetyczne wytworzone przez uzwojenie trójfazowe.
Każdy z prądów fazowych wytwarza pole pulsujące w osi danego uzwojenia.
Określenia wypadkowego pola magnetycznego jest równoznaczne z wyznaczeniem
wypadkowego przepływu. W tym wypadku należy wykonać sumowanie przepływów
poszczególnych faz. Dla wykresu prądów przestawionych na rys.3.6. a), prąd i
u
ma wartość
maksymalną dodatnią, więc przepływ
u
=
max
będzie miał wartość maksymalną
i będzie skierowany wzdłuż osi dodatniej uzwojenia. Wartości chwilowe prądów i
v
oraz i
w
są
ujemne i równe połowie wartości maksymalnej. A więc przypływy
v
i
w
będą skierowane
przeciwnie do swych dodatnich osi magnetycznych a wartość tych przepływów będzie równa
połowie wartości maksymalnej czyli
v
= – 0.5
max
,
v
= – 0.5
max
. Suma poszczególnych
wynosi
max
2
3
(3.2)
A więc wypadkowy przepływ jest 1.5 razy większy od przepływu maksymalnego danej fazy.
Dla kolejnych chwil czasowych, gdy
=
s
t=2/3 oraz
=
s
t =4/3 (rys.3.6. b) i c)),
otrzymuje się inne chwilowe wartości prądów fazowych, lecz wartość przepływu
wypadkowego jest taka sama. Natomiast oś przypływu obraca się o taki sam kąt jak wektory
prądów fazowych. Powstałe w ten sposób pole magnetyczne nazywamy polem wirującym.
Prędkość obrotowa wirowania pola przypływu a tym samym i pola magnetycznego stojana
nazywana jest prędkością synchroniczną i zależna jest od częstotliwości prądów trójfazowych
oraz od liczby par biegunów i wynosi
p
f
n
s
s
[obr/s]
(3.3)
lub
p
f
n
s
s
60
[obr/min]
(3.4)
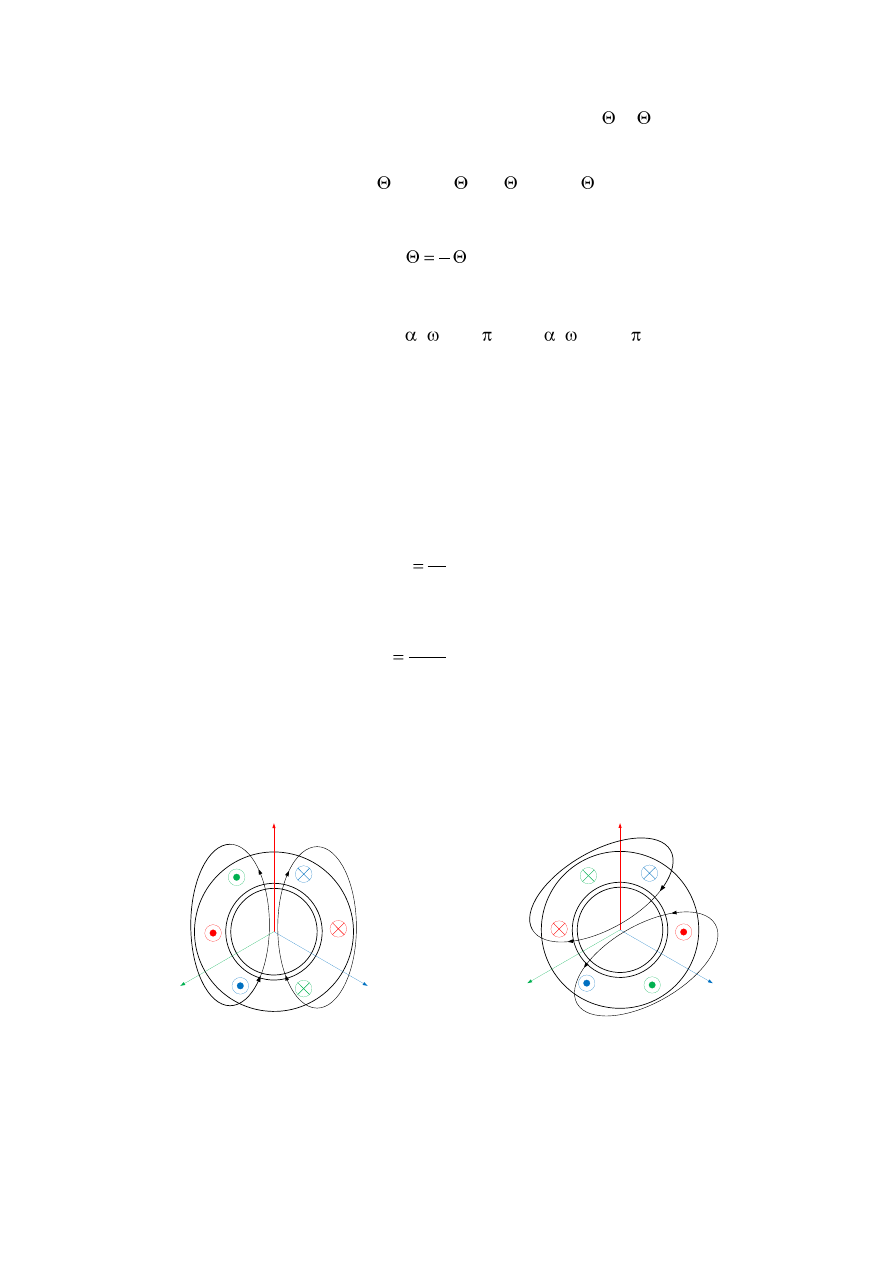
Na rys.3.7. przedstawiono obraz graficzny pola. Kierunek pola określa się posługując reguła
śruby prawoskrętnej. Kierunek prądu w uzwojeniu przedstawia wartości chwilowe prądów
fazowych.
a)
U
V
W
W1
W2
V2
U2
V1
U1
Φ
b)
U
V
W
W1
W2
V2
U2
V1
U1
Φ
Rys. 3.7. Graficzny obraz pola.
Prąd trójfazowy płynący przez trójfazowe uzwojenie stojana wytwarza pole wirujące.
Podstawowa harmoniczna tego pola wiruje z prędkością synchroniczną względem
nieruchomego stojana
p
f
n
s
s
(3.5)
gdzie:
f
s
- częstotliwość napięcia zasilającego uzwojenie stojana, p- liczba par biegunów.
Wirujący strumień magnetyczny stojana indukuje w uzwojeniu stojana wartość skuteczną
napięcia
s
ws
s
s
f
k
N
E
2
(3.6)
Jeżeli wirnik pozostaje nieruchomy, to w każdej fazie uzwojenia wirnika indukuje się
napięcie o wartości skutecznej równej
s
wr
r
r
f
k
N
E
2
0
(3.7)
Zwrot tego napięcia określamy za pomocą reguły prawej dłoni (rys 3.8). Jeżeli prawą dłoń
ułożymy tak, aby linie pola były zwrócone prostopadle do dłoni, a kciuk odchylony w
kierunku prędkości względnej przewodu względem pola, to cztery wyprostowane palce
wskażą zwrot napięcia indukowanego E
r0
.
F
Φ
F
E
ro
, I
r
n
R
Rys.3.8. Zwroty napięcia, prądu i siły w uzwojeniu wirnika silnika indukcyjnego.
Gdy obwód elektryczny wirnika jest zamknięty, to popłynie prąd I
r
, którego zwrot jest zgodny
ze zwrotem napięcia E
r0
. Na przewód z prądem znajdujący się w polu magnetycznym działa
siła F
)
(
B
l
r
I
F
(3.8)
Zwrot tej siły wyznaczamy za pomocą reguły lewej dłoni (rys 3.8.).. Jeżeli lewa dłoń zostanie
ułożona tak, aby linie pola były skierowane do dłoni, a cztery wyprostowane palce
wskazywały kierunek prądu, to odchylony kciuk wskaże kierunek siły F. A więc powstanie
moment obrotowy
R
F
M
(3.9)
skierowany w kierunku wirowania pola magnetycznego i wirnik zacznie się obracać
z prędkością n mniejszą od prędkości synchronicznej n
s
. Przy prędkości obrotowej wirnika n
pole stojana obraca się względem wirnika z prędkością
n
n
n
s
r
(3.10)
Stosunek prędkości obrotowej pola magnetycznego stojana względem wirnika n
r
odniesiony
do prędkości pola nazywamy poślizgiem
s
s
s
n
n
n
n
n
s
1
(3.11)
Prędkość wirnika można wyrazić poprzez prędkość synchroniczną n
s
i poślizg s
)
1
(
s
n
n
s
(3.12)
Częstotliwość napięcia indukowanego w uzwojeniu wirnika zależy od prędkości od prędkości
pola względem wirnika
s
f
n
n
n
pn
pn
f
s
s
s
s
r
r
(3.13)
Napięcie indukowane w uzwojeniu wirnika przy dowolnej prędkości n wyraża się zależnością
s
E
s
f
k
N
f
k
N
E
r
s
wr
r
r
wr
r
r
0
2
2
(3.14)
Prąd I
r
płynący w uzwojeniu wirnika pod wpływem napięcia E
r
ma również częstotliwość f
r
i wytwarza własne pole magnetyczne, które wiruje względem wirnika z prędkością
s
n
s
p
f
p
f
n
s
s
r
r
(3.15)
Natomiast pole magnetyczne wirnika wiruje względem stojana z prędkością
s
s
s
r
n
s
n
s
n
n
n
)
1
(
(3.16)
Z zależności (3.5) i (3.16) wynika, że pola magnetyczne wytworzone przez uzwojenie stojana
i wirnika są względem siebie nieruchome dla każdej prędkości obrotowej wirnika, dając
wypadkowe pole magnetyczne. To wypadkowe pole magnetyczne indukuje w uzwojeniu
stojana napięcie E
s
o częstotliwości sieci f
r
i w uzwojeniu wirnika napięcie E
r
o częstotliwości f
r
. Stosunek napięć i indukowanych przy nieruchomym wirniku nazywamy
przekładnią napięciową
wr
r
ws
s
r
s
u
k
N
k
N
E
E
0
(3.17)
gdzie: N
s
k
ws
, N
r
k
wr
– efektywna liczba zwojów szeregowych jednej fazy odpowiednio
uzwojenia stojana i wirnika.
Wynika stąd, że
'
0
0
r
u
r
s
E
E
E
(3.18)
gdzie:
'
0
r
E - napięcie indukowane w uzwojeniu wirnika sprowadzone na stronę stojana, przy
czym
u
r
r
E
E
0
'
0
(3.19)
Prądy stojana i wirnika wytwarzają przepływy
s
ws
s
s
s
I
p
k
N
m
2
4
2
(3.20)
4
2
2
r
wr
r
r
r
N k
m
I
p
(3.21)
gdzie: m
s
, m
r
– odpowiednio liczba faz uzwojenia stojana i wirnika.
Strumień wypadkowy
jest wynikiem działania wypadkowego przepływu
0
0
0
0
R
(3.22)
gdzie: R
μ
– reluktancja obwodu magnetycznego.
przy czym, przepływ wypadkowego jest różnicą przepływu stojana i wirnika.
0
0
2
4
2
I
p
k
N
m
ws
s
s
r
s
(3.23)
Przepływ wypadkowy
0
jest to przepływ wytworzony przez prąd biegu jałowego I
0
, który
płynie w uzwojeniu stojan. Podstawiając zależności (3.20) i (3.21) do równania (3.23),
otrzymuje się
r
wr
r
r
s
ws
s
s
ws
s
s
I
p
k
N
m
I
p
k
N
m
I
p
k
N
m
2
4
2
2
4
2
2
4
2
0
(3.24)
stąd
'
0
r
s
i
r
s
r
ws
s
wr
r
s
r
s
I
I
I
I
I
k
N
k
N
m
m
I
I
(3.25)
gdzie:
'
r
I
- prąd wirnika sprowadzony na stronę uzwojenia stojana,
i
- przekładnia prądowa,
przy czym
i
r
r
I
I
'
(3.26)
wr
r
ws
s
r
s
i
k
N
k
N
m
m
(3.27)
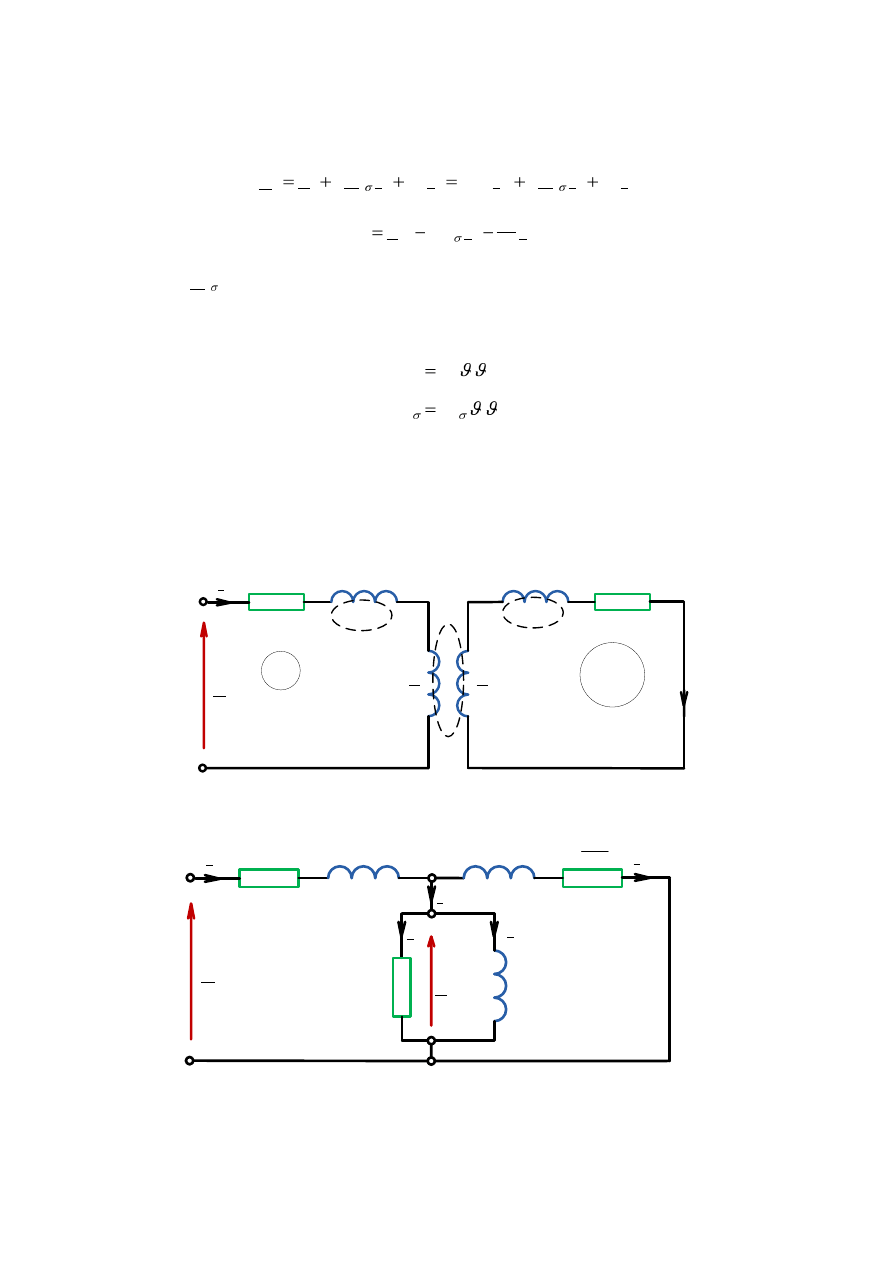
3.3 SCHEMAT ZASTĘPCZY i WYKRES WSKAZOWY
W uzwojeniach stojana i wirnika oprócz napięć E
s
i E
r
, indukowanych w uzwojeniach stojana
przez strumień główny , występują napięcia E
s
oraz E
r
indukowane przez strumienie
rozproszenia
s
i
r
(rys.3.9.).
Φ
E
r
, E
rσ
Φ
rσ
Φ
sσ
I
s
I
r
E
s
, E
sσ
Rys.3.9. Obraz strumieni, napięć i prądów.
Napięcia te, podobnie jak w transformatorze można traktować jako napięcia na reaktancji
indukcyjnej
m
m
s
ws
s
r
s
I
jX
f
k
N
E
E
2
'
0
(3.28)
m
m
u
u
r
r
s
wr
r
r
I
X
js
E
s
s
E
s
f
k
N
E
'
0
0
2
(3.29)
s
s
s
s
ws
s
s
I
jX
f
k
N
E
2
(3.30)
r
r
r
s
ws
s
r
I
sX
j
s
f
k
N
E
2
(3.31)
Dla uzwojenia stojana i wirnika można sporządzić bilans napięć
s
s
s
s
s
s
s
s
s
I
R
I
X
j
E
I
R
E
E
U
(3.32)
r
r
r
r
r
r
r
r
I
R
I
X
js
s
E
I
R
E
E
0
0
(3.33)
Równaniom (3.32) i (3.33) odpowiada schemat zastępczy przestawiony na rys.3.10.
Mnożąc drugie równanie obustronnie przez
s
u
otrzymuje się
i
r
i
u
r
i
r
i
u
r
u
r
I
s
R
I
X
j
E
0
0
(3.34)
Uwzględniając zależności (3.18) i (3.28) oraz równania (3.32) i (3.34) można zapisać
w postaci
s
s
s
s
m
m
s
s
s
s
s
s
I
R
I
X
j
I
jX
I
R
I
X
j
E
U
(3.35)
'
'
'
'
'
0
0
r
r
r
r
r
I
s
R
I
jX
E
(3.36)
gdzie:
'
r
R
,
'
r
X
- odpowiednio, rezystancja i reaktancja rozproszenia wirnika sprowadzona na
stronę uzwojenia stojana, przy czym
i
u
r
r
R
R
'
(3.37)
i
u
r
r
X
X
'
(3.38)
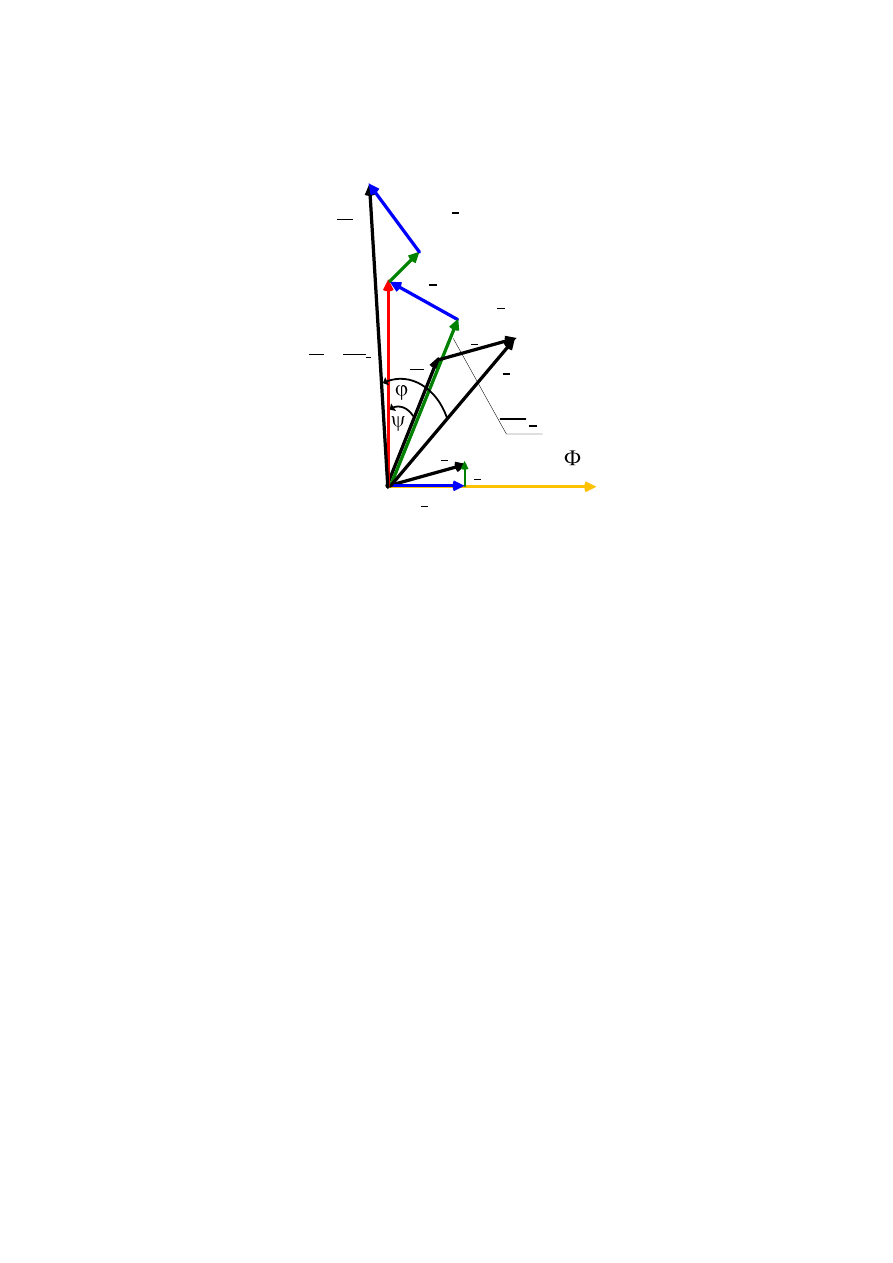
Równaniom (3.35) i (3.36) odpowiada schemat zastępczy przedstawiony na rys.3.10. oraz
wykres wskazowy (rys 3.11.).
a)
R
s
R
r
sX
r
s
X
s
s
U
s
I
s
X
m
f
s
f
r
=sf
s
`
`
`
`
E
s
`
F
E
r
F
s
F
r
b)
R
s
R
’
r
X
’
r
s
X
s
s
R
Fe
E
s
=E’
r0
U
s
I
’
r
I
s
I
0
I
Fe
I
m
X
m
s
Rys.3.10. Schematy zastępcze maszyny indukcyjnej: a) oddzielone obwody stojana i wirnika, b)
połączenie obwodów stojana i wirnika w czwórnik z uwzględnieniem strat w rdzeniu.
Schemat zastępczy przedstawiony na rys.3.10.b) uzupełniony jest o rezystancję R
Fe
reprezentującą straty w rdzeniu stojana.
U
s
jX’
r
s
I’
r
R
s
I
s
jX’
s
s
I
s
s
I
Fe
I
0
I
m
I’
r
I’
r
I
s
E
s
=E’
r
r
R’
r
s
I
0
Rys.3.11. Wykres wskazowy maszyny indukcyjnej dla stanu obciążenia.
3.4 PODSTAWOWE STANY PRACY MASZYNY INDUKCYJNEJ
3.4.1
Stan jałowy
Stan jałowy maszyny indukcyjnej występuje wtedy, gdy maszyna na wale nie jest
obciążona momentem mechanicznym. Pracuje ona wówczas jako silnik, którego wirnik
obraca się z prędkością bliską prędkości synchronicznej. Poślizg w tym stanie pracy jest
znikomo mały rzędu 0.001, a zatem rezystancja wirnika
s
R
r
/
, czyli można uważać że
obwód wirnika jest rozwarty (I
r
=0). Schemat zastępczy silnika i wykres wskazowy
przedstawiono na rys.3.12.
a)
R
s
X
s
s
R
Fe
E
s
U
s
I
s0
I
0
I
Fe
I
m
X
m
b)
U
s
R
s
I
0
jX
s
s
I
0
0
I
Fe
I
0i
I
m
E
s
I
0
I
mech
Rys. 3.12. Stan jałowy maszyny indukcyjnej (przy s=0): a) schemat zastępczy, b) wykres wskazowy,
W stanie jałowym moc pobierana z sieci P
0
idzie na pokrycie strat w uzwojeniu stojana P
Cu0
oraz w rdzeniu P
Fe
oraz strat mechanicznych P
m
0
0
0
0
cos
Cus
m
Fe
s
s
s
P
P
P
I
U
m
P
(3.39)
Prąd w stanie jałowym dla maszyn indukcyjnych przy zasilaniu napięciem znamionowym
wynosi I
s0
= (0.25 0.5)I
sN
, dla maszyn małych może osiągać wartość 0.7I
sN
. Współczynnik
mocy przy biegu jałowym cos
0
= 0.1 0.2.
Strat w rdzeniu oraz straty mechaniczne nazywane są stratami jałowymi P
0
i są mniejsze od
mocy biegu jałowego o wartość strat w uzwojeniu stojana
m
Fe
Cus
P
P
P
P
P
0
0
0
(3.40)
Straty w rdzeniu są zależne od kwadratu napięcia zasilającego U
s
2
s
Fe
Fe
U
c
P
(3.41)
Straty mechaniczne są w przybliżeniu zależne od kwadratu prędkości obrotowej. W zakresie
niewielkich zmian prędkości są praktycznie stałe. Na rys.3.13 przedstawiono charakterystyki
biegu jałowego czyli zależność strat jałowych P
0
, prądu jałowego I
s0
, współczynnika biegu
jałowego od napięcia zasilającego.
P
0
U
sN
U
0
DP
FeN
DP
mN
DP
0
I
0
cos
f
0
DP
0
P
0
I
0
f = f
N
DP
CuN
cos
f
0
Rys. 3.13. Charakterystyki biegu jałowego.
Wykreślając straty jałowe w funkcji kwadratu napięcia, dokonujemy rozdziału strat na
straty w rdzeniu i straty mechaniczne (rys.3.14)
DP
0
U
2
sN
U
2
DP
Fe
DP
m
Rys. 3.14. Zależność strat jałowych od kwadratu napięcia – podział strat jałowych na straty w rdzeniu
i straty mechaniczne.
Na postawie pomiarów w stanie jałowym, można wyznaczyć parametry gałęzi poprzecznej
schematu zastępczego, tj. rezystancję R
Fe
reprezentującą straty w rdzeniu oraz reaktancję
magnesowania X
m
. W tym celu należy wyznaczyć
prąd reprezentujący straty mechaniczne
s
m
s
m
mech
U
P
E
P
I
(3.42)
prąd reprezentujący straty w rdzeniu
s
Fe
s
Fe
Fe
U
P
E
P
I
(3.43)
prąd magnesujący
2
2
0
)
(
mech
Fe
s
m
I
I
I
I
(3.44)
Dla obliczonych wartości prądów I
Fe
i I
m
, rezystancję R
Fe
i reaktancję magnesowania
wyznacza się z zależności
Fe
s
Fe
s
Fe
I
U
I
E
R
(3.45)
m
s
m
s
m
I
U
I
E
X
(3.46)
3.4.2
Stan zwarcia
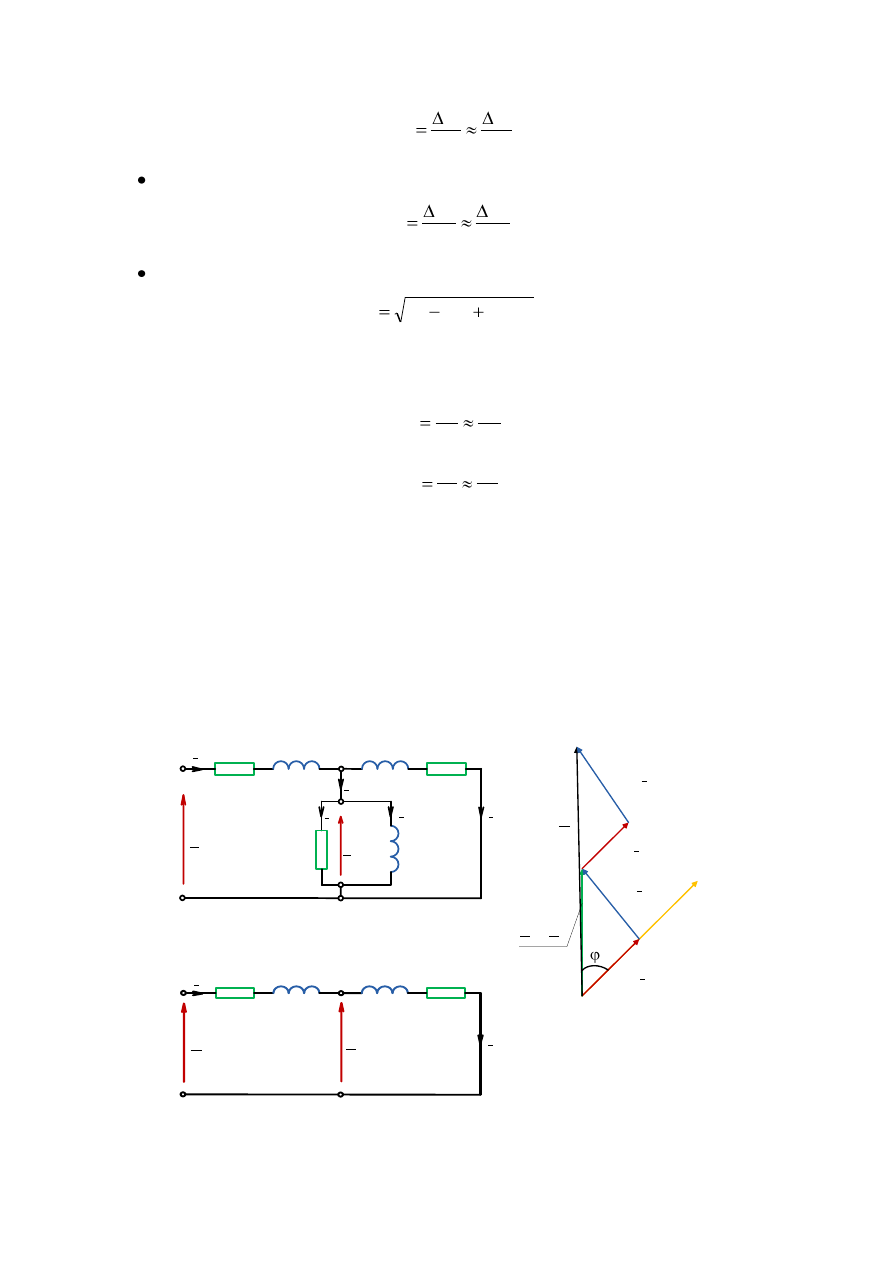
Stanem zwarcia maszyny indukcyjnej nazywamy stan, który występuje gdy uzwojenie
stojana jest zasilane a wirnik zahamowany (n =0, s =1) i zwarty. Schemat zastępczy dla stanu
zwarcia przedstawiono na rys.3.15.a). W stanie zwarcia można pominąć prąd jałowy I
0
i korzystać z uproszczonego schematu zastępczego (rys.3.15. b)), któremu odpowiada wykres
wskazowy przedstawiony na rys.3.15. c).
a)
R
s
R
’
r
X
’
r
s
X
s
s
R
Fe
E
s
=E’
r
U
s
I
sz
I
0
I
Fe
I
m
X
m
I
rz
b)
R
s
R
’
r
X
’
r
s
X
s
s
U
s
I
sz
I
’
rz
E
s
=E’
r
c)
E
s
= E’
r
z
U
s
R’
r
I’
rz
R
1
I
sz
jX’
r
s
I’
rz
jX’
s
s
I
sz
Rys. 3.15. Stan zwarcia maszyny indukcyjnej: a),b) schemat zastępczy, c) wykres wskazowy.
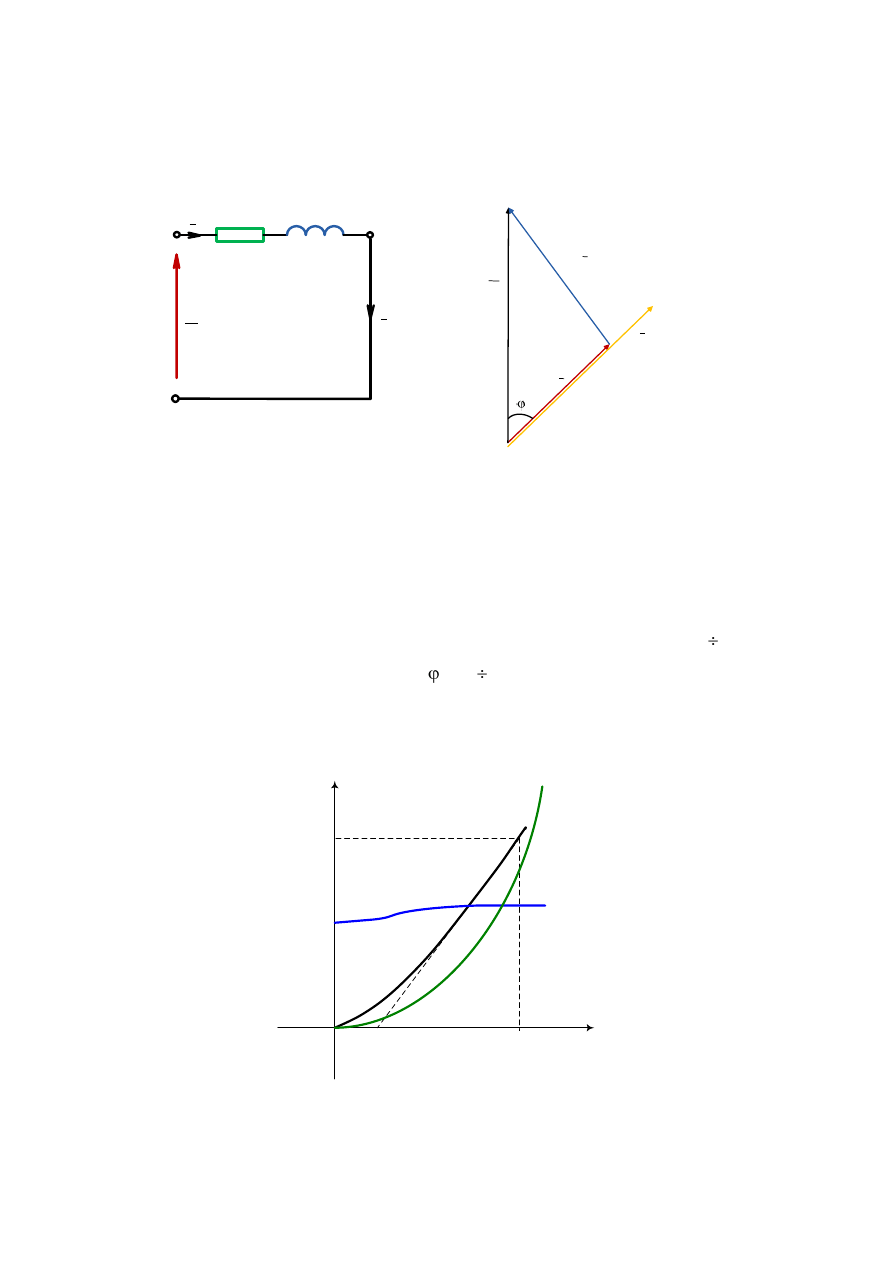
Na rys.3.16. przedstawiono schemat zastępczy i wykres wskazowy maszyny indukcyjnej
w formie zwartej.
a)
U
s
I
rz
R
z
X
z
I
sz
b)
z
U
s
R
z
I
z
I
z
jX
z
I
z
Rys. 3.16. Stan zwarcia maszyny indukcyjnej w formie zwartej: a) schemat zastępczy, b) wykres
wskazowy; R
z
=R
s
+R’
r
, X
z
=X
s
+X’
r
.
W stanie zwarcia przy zasilaniu silnika napięciem znamionowym, silnik pobiera z sieci prąd
5-8 krotnie większy od znamionowego. Stan zwarcia laboratoryjnego wykonuje się przy
takim napięciu, zwanym napięciem zwarcia, przy którym w uzwojeniu stojana płynie prąd
znamionowy. Napięcie zwarcia maszyn indukcyjnych wynosi zwykle (0.15 0.20)U
sN
.
Współczynnik mocy w stanie zwarcia cos
z
=0.2 0.4. Na rys.3.17 przedstawione są tzw.
charakterystyki zwarcia, czyli zależności prądu, mocy i współczynnika mocy od napięcia
zasilania w stanie zwarcia.
I
z
U
zN
U
z
P
z
cos
f
z
f = f
N
P
z
cos
f
z
I
z
s = 1
DU
z
Rys. 3.17. Charakterystyki stanu zwarcia.
Moc pobierana z sieci w stanie zwarcia P
z
, wobec znikomych strat w rdzeniu, idzie na
pokrycie strat obciążeniowych tj. strat w uzwojeniach stojana i wirnika, czyli
2
z
s
z z
P
m R I
(3.47)
gdzie: I
z
– prąd stojana w stanie zwarcia, R
z
– rezystancja zwarcia, przy czym
'
z
s
r
R
R
R
(3.48)
Z pomiarów w stanie zwarcia można wyznaczyć parametry gałęzi poprzecznej schematu
zastępczego, tj.
impedancję zwarcia
z
z
z
U
Z
I
(3.49)
rezystancję zwarcia
2
3
z
z
z
P
R
I
(3.50)
reaktancję zwarcia
2
2
z
z
z
X
Z
R
(3.51)
Znając rezystancję stojana R
s
, rezystancję wirnika wyznaczamy z zależności (3.48)
'
r
z
s
R
R
R
(3.52)
Nie istnieje prosta metoda pozwalająca z pomiarów wyznaczyć oddzielnie reaktancję
rozproszenia stojana X
s
i reaktancję rozproszenia wirnika
'
r
X
. Dla silników
pierścieniowych można przyjąć, że reaktancje te są sobie równe
'
2
z
s
r
X
X
X
(3.53)
Dla silników klatkowych można przyjmować następujące relacje
0.35
s
z
X
X
(3.54)
'
0.65
r
z
X
X
(3.55)
3.4.3
Bilans mocy
Silnik indukcyjny pobiera z sieci moc czynną
1
cos
s s
s
s
P
m I U
(3.56)
Odejmując od tej mocy straty w uzwojeniu stojana
s
s
s
Cus
R
I
m
P
2
(3.57)
Oraz straty w rdzeniu
2
2
s
Fe
Fe
Fe
s
Fe
U
c
R
I
m
P
(3.58)
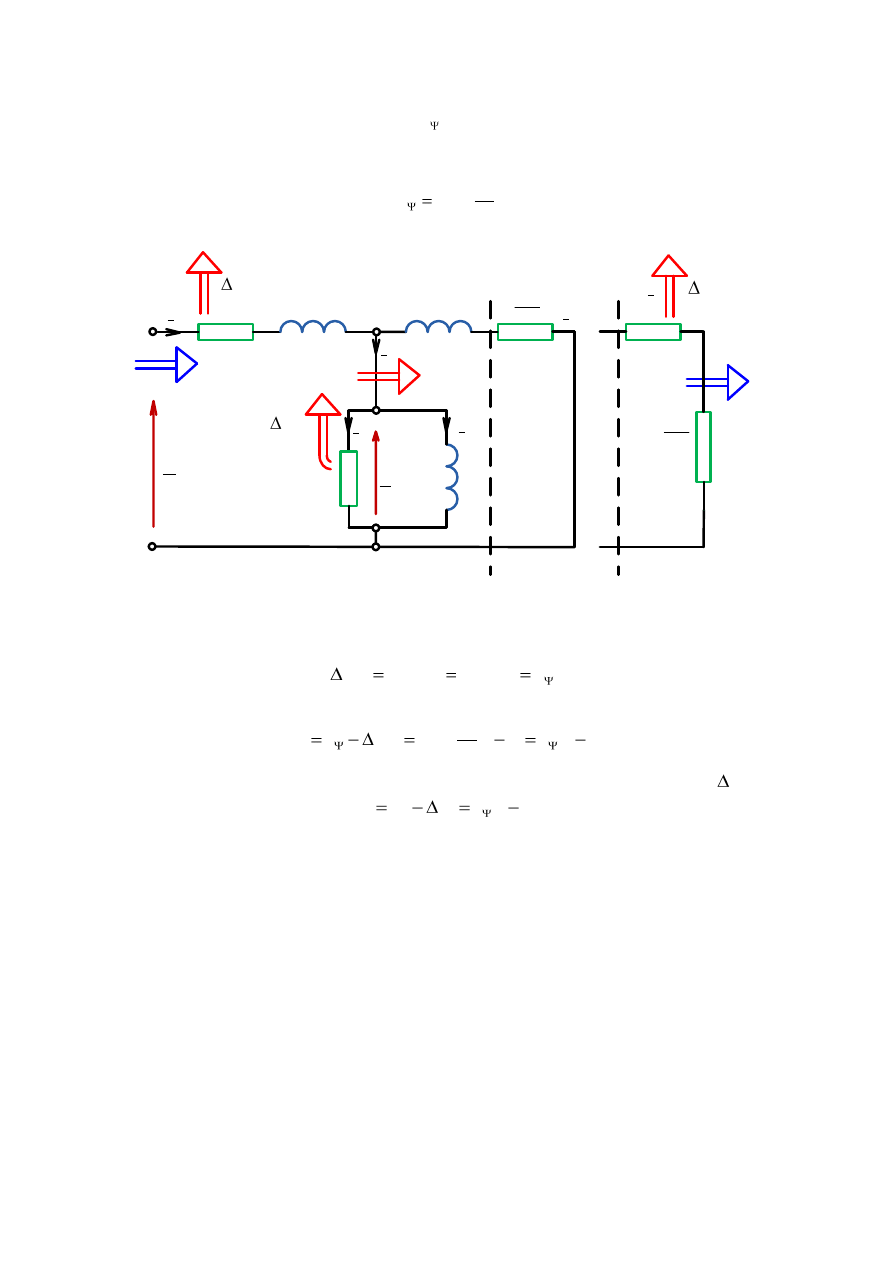
Otrzymuje się moc elektromagnetyczną P
przekazywaną ze stojana do wirnika, która
zgodnie ze schematem zastępczym (rys.3.18) wynosi
s
R
I
m
P
r
r
s
'
2
'
(3.59)
I
r
R
s
R
’
r
X
’
r
s
X
s
s
R
Fe
E
s
=E’
20
U
s
I
’
r
I
s
I
0
I
Fe
I
m
X
m
P
1
P
y
P
Fe
s
R
’
r
R
’
r
1-
s
s
P
m
P
Cur
P
cu1
Rys.3.18. Schemat zastępczy maszyny indukcyjnej ilustrujący bilans rozpływu mocy i strat mocy.
Odejmując od mocy elektromagnetycznej straty w uzwojeniu wirnika
s
P
R
I
m
R
I
m
P
r
r
s
r
r
r
Cur
'
2
'
2
(3.60)
moc mechaniczną
)
1
(
)
1
(
'
2
'
s
P
s
s
R
I
m
P
P
P
r
r
s
Cur
m
(3.61)
Moc na wale silnika
2
P jest mniejsza od mocy mechanicznej od straty mechaniczne
m
P
)
1
(
2
s
P
P
P
P
m
m
(3.62)
Straty mechaniczne nie są ujęte na schemacie zastępczym. Bilans mocy i strat przedstawiono
na schemacie zastępczym (rys.3.18.) oraz zilustrowano na wykresie rozpływu mocy i strat
zwanym wykresem Sankeya (rys.3.19.).
P
Cus
P
Fe
DP
Cur
+
DP
e
=Pe
P
m
P
2
P
1
P
y
P
m
w
ir
n
ik
Szczelina
powietrzna
s
to
ja
n
Rys.3.19. Wykres rozpływu mocy i strat mocy maszyny indukcyjnej – wykres Sankey’a.
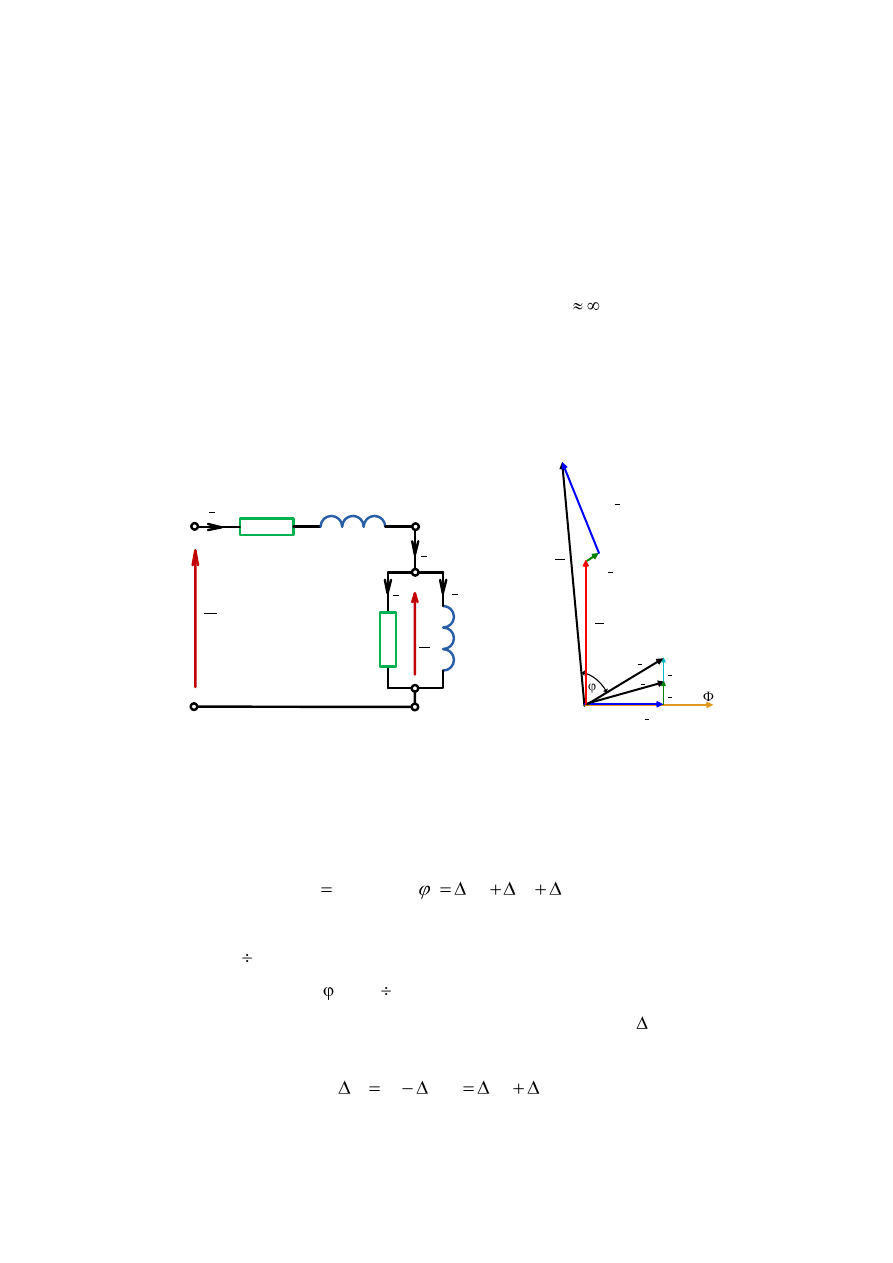
3.5 MOMENT ELEKTROMAGNETYCZNY, CHARAKTERYSTYKA
MECHANICZNA MASZYNY INDUKCYJNEJ
W celu wyprowadzenia zależności na moment elektromagnetyczny pomija się zwykle
rezystancję stojana R
s
oraz prąd biegu jałowego I
0
, otrzymując uproszczony schemat
zastępczy przedstawiony na rys.3.20.
R
’
r
X
’
r
s
X
s
s
E
s
=E’
r0
U
s
I
S
s
Z
’
r
(s)
I
’
r
≈ I
s
Rys.3.20. Schemat zastępczy silnika indukcyjnego w którym pominięto rezystancję stojana R
s
oraz prąd jałowy I
0
.
Moc elektromagnetyczna przekazywana ze stojana do wirnika, jak to wynika ze schematu
zastępczego jest równa
s
R
I
m
P
r
r
s
'
2
'
(3.63)
Moment na wale silnika jest równy
s
P
M
(3.64)
Uwzględniając, że moc na wale jest mniejsza od mocy mechanicznej o straty mechaniczne
P
m
m
m
s
P
P
P
(3.65)
równanie (3.64) można napisać w postaci
m
m
s
P
P
P
M
(3.66)
Uwzględniając, że
)
1
(
s
P
P
m
(3.67)
)
1
(
s
s
(3.68)
równanie (3.66) można napisać w postaci
m
e
m
s
M
M
P
P
M
(3.69)
Pierwszy składnik równania (3.69) reprezentuje moment elektromagnetyczny
s
e
P
M
(3.70)
natomiast drugi składnik reprezentuje moment strat mechanicznych
m
m
P
M
(3.71)
A więc moment na wale jest mniejszy od momentu elektromagnetycznego o wartość
momentu strat mechanicznych. W silnikach o mocy powyżej 1 kW możemy pominąć moment
strat mechanicznych i przyjąć, że moment na wale jest równy momentowi
elektromagnetycznemu. Uwzględniając zależność (3.59), moment elektromagnetyczny można
wyznaczyć ze wzoru
s
R
I
m
P
M
r
r
s
s
s
e
'
2
'
(3.72)
Na podstawie uproszczonego schematu zastępczego można wyznaczyć prąd wirnika
2
2
'
'
k
r
s
s
r
X
s
R
U
I
I
(3.73)
gdzie: X
k
– reaktancja zwarcia, przy czym
'
r
s
k
X
X
X
(3.74)
Podstawiając zależność (3.73) do równania (3.72), otrzymujemy wyrażenie na moment
elektromagnetyczny silnika indukcyjnego
2
2
2
'
'
2
2
2
'
'
2
k
r
r
s
s
s
k
r
r
s
s
s
e
X
s
R
s
R
U
m
X
s
R
s
R
U
m
M
(3.75)
Obliczając pochodną momentu M
e
względem poślizgu s, wyznacza się wartość momentu
maksymalnego
0
2
)
(
2
2
2
'
'
2
2
2
2
2
'
'
2
k
r
r
k
k
r
r
s
s
s
e
X
s
R
R
X
s
X
s
R
R
U
m
ds
dM
(3.76)
stąd
k
r
k
X
R
s
'
(3.77)
Wyrażenie (3.77) nazywamy poślizgiem krytycznym. Jest to wartość poślizgu, dla którego
moment elektromagnetyczny osiąga wartość maksymalną. Podstawiając zależność (3.77) do
równania (3.75), otrzymuje się wyrażenie na moment maksymalny M
k
zwany również
momentem krytycznym
k
s
s
s
k
X
U
m
M
2
2
(3.78)
Znak (+) we wzorach (3.77) i (3.78) odnosi się do pracy silnikowej a znak (-) do pracy
prądnicowej. Uwzględniając, że
p
f
p
s
s
s
2
(3.79)
k
s
k
L
f
X
2
(3.80)
równanie na moment krytyczny przyjmie postać
2
2
8
s
s
k
s
k
f
U
L
p
m
M
(3.81)
Z zależności (3.81) wynika, że moment maksymalny jest proporcjonalny do kwadratu
wartości skutecznej napięcia fazowego stojana i odwrotnie proporcjonalny do kwadratu
częstotliwości napięcia zasilającego. Przy zachowaniu stałego stosunku
.
const
f
U
s
s
(3.82)
moment krytyczny ma stałą wartość.
Stosunek momentu przy dowolnym poślizgu (3.75) do momentu maksymalnego (3.78)
określa zależność
s
s
s
s
M
M
k
k
k
e
2
(3.83)
Wyrażenie (3.83) nosi nazwę wzoru Klossa.
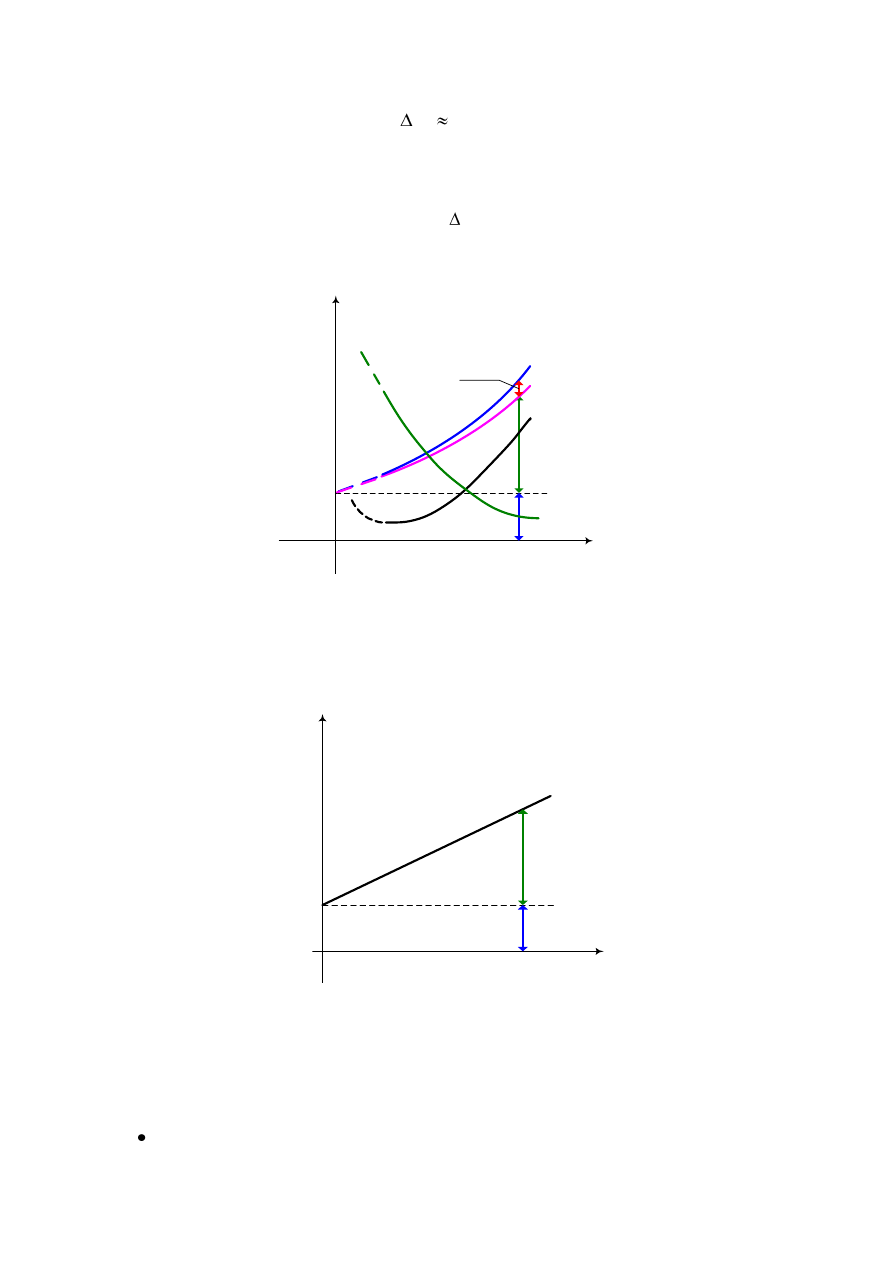
Zależność momentu elektromagnetycznego od prędkości obrotowej n lub od poślizgu s
nazywa się charakterystyką mechaniczną (rys.3.21).
0
M
M
r
hamulec
silnik
generator
s
0
1
2
-1
-n
s
M
k
n
s
s
k
2n
s
n
Rys.3.21. Charakterystyka mechaniczna maszyny indukcyjnej.
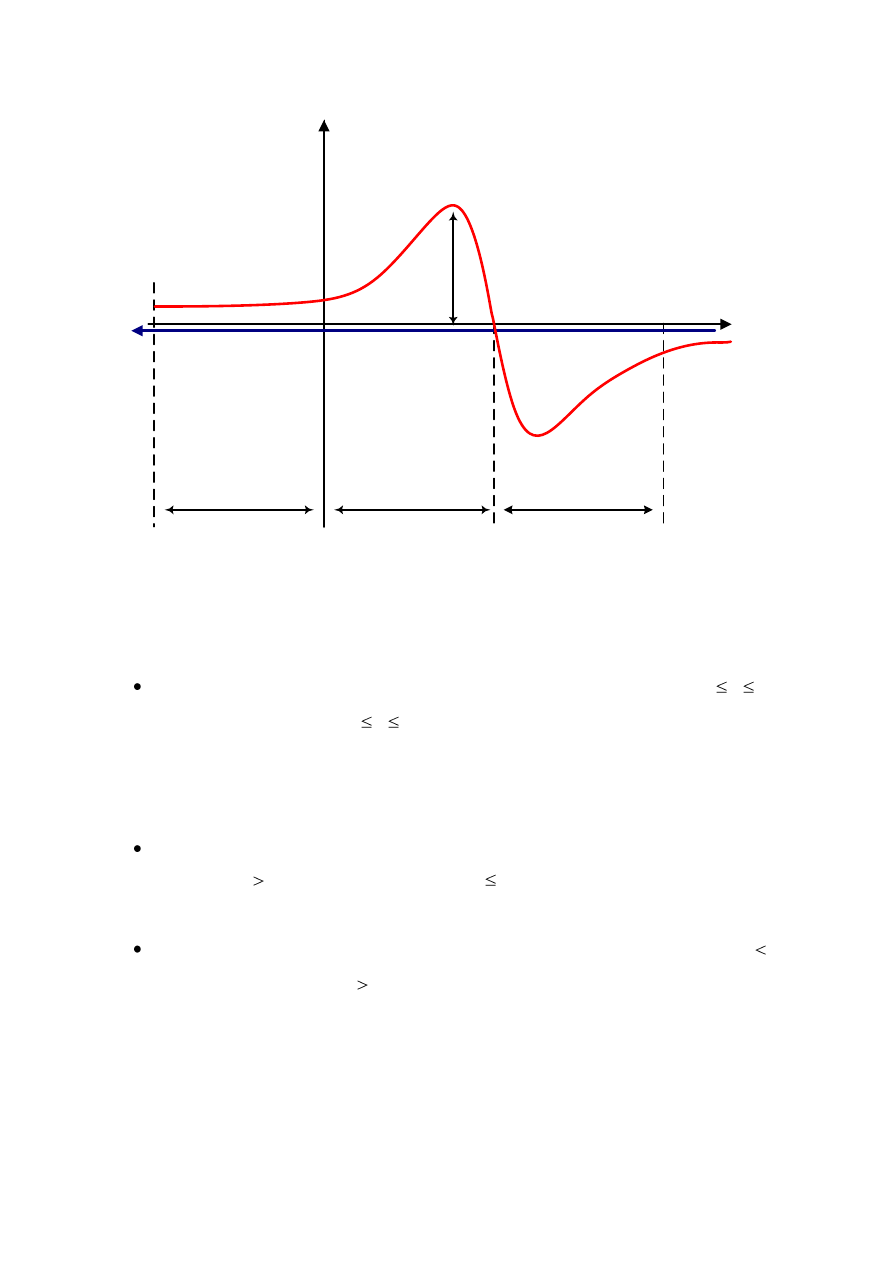
Wyróżnić tu można trzy podstawowe stany pracy silnika indukcyjnego:
praca silnikowa. Praca silnikowa występuje w zakresie prędkości obrotowej
s
n
n
0
lub w zakresie poślizgów
1
0
s
Wyróżnić tu można jeszcze stan idealnego biegu jałowego dla n = n
s
czyli s = 0 i stan zwarcia
(wirnik zahamowany) dla n = 0 czyli s = 1
praca prądnicowa (generatorowa). Praca prądnicowa występuje w zakresie prędkości
obrotowej
s
n
n
lub w zakresie poślizgów
0
s
praca hamulcowa. Praca hamulcowa występuje w zakresie prędkości obrotowej
s
n
n
lub w zakresie poślizgów
1
s
.
Przy pracy prądnicowej wirnik obraca się w kierunku wirowania pola wirującego
z prędkością większą od synchronicznej. Natomiast przy pracy hamulcowej wirnik obraca się
w kierunku przeciwnym do kierunku pola wirującego.
3.5 REGULACJA PRĘDKOŚCI OBROTOWEJ SILNIKÓW INDUKCYJNYCH
Prędkość obrotowa silnika zmienia się zgodnie ze wzorem (3.12) wg zależności
)
1
(
)
1
(
s
p
f
s
n
n
s
s
(3.84)
przy czym
s
r
r
r
f
f
E
E
s
0
(3. 85)
Biorąc pod uwagę, że
2
2
2
0
r
r
r
r
X
s
R
I
E
(3.86)
równanie (3.85) po przekształceniach algebraicznych ze względu na poślizg s możemy
zapisać w postaci
2
2
2
0
r
r
r
r
r
I
X
E
I
R
s
(3.87)
Uwzględniając, że
u
s
u
s
r
U
E
E
0
(3.88)
zależność (3.87) przyjmie postać
2
2
2
r
r
u
s
r
r
I
X
U
I
R
s
(3.89)
Z zależności (3.84) wynika, że prędkość obrotową można regulować przez zmianę
częstotliwości f
s
napięcia zasilającego
liczby par biegunów p
poślizgu s
Poślizg silnika, jak wynika ze wzorów (3.89), w praktyce reguluje się trzema sposobami
przez zmianę napięcia zasilającego U
s
przez zmianę rezystancji w obwodzie wirnika – silniki pierścieniowe
przez zmianę częstotliwości w obwodzie wirnika – silniki pierścieniowe
przez zmianę napięcia E
r
doprowadzonego do obwodu wirnika – silniki pierścieniowe
Przy rozpatrywaniu regulacji prędkości obrotowej przez zmianę jednego z parametrów,
pozostałe parametry przyjmuje się jako stałe.
3.6.1 Regulacja napięcia poprzez zmianę częstotliwości
Zmieniając częstotliwość napięcia zasilania silnika indukcyjnego regulujemy prędkość
synchroniczną pola wirującego, a tym samym jak to wynika ze wzoru (3.84), regulujemy
prędkość wirnika. Przebieg charakterystyk mechanicznych przy zmianach częstotliwości
i stałej wartości amplitudy napięcia zasilającego przedstawiono na rys. 3.22.
M
n
sN
0
M
kN
M
k
’
M
k
’’
f
’
< f
N
f
’’
> f
N
f = f
N
M
m
n
s
’’
n
s
’
n
N
n
’’
n
’
n
Rys.3.22. Charakterystyki mechaniczne przy zmianie częstotliwości przy U
s
=const.
Zmniejszenie częstotliwości, przy stałym napięciu zasilającym i stałym momencie obciążenia
mechanicznego, powoduje spadek prędkości obrotowej i wzrost momentu maksymalnego.
Natomiast wzrost częstotliwości powoduje zwiększenie prędkości obrotowej zmniejszenie
momentu maksymalnego.
Przy zmniejszeniu częstotliwości strumień magnetyczny rośnie, gdyż przy stałej
wartości napięcia zasilającego U
s
, w przybliżeniu stała jest również wartość napięcia
indukowanego w stojanie E
s
s
ws
s
s
s
f
k
N
U
E
2
(3.90)
stąd
f
k
N
U
ws
s
s
2
(3.91)
Wzrost strumienia magnetycznego, przy zmniejszeniu częstotliwości i przy stałym napięciu
zasilającym, powoduje wzrost indukcji magnetycznej w rdzeniu stojana i wirnika i rosną
straty w rdzeniu, które są zależne od kwadratu indukcji.
Z zależności (3.91) wynika, że aby zachować stały strumień w maszynie, należy przy
zmianie częstotliwości utrzymywać stały stosunek napięcia zasilającego do częstotliwości,
czyli
.
const
f
U
s
s
(3.92)
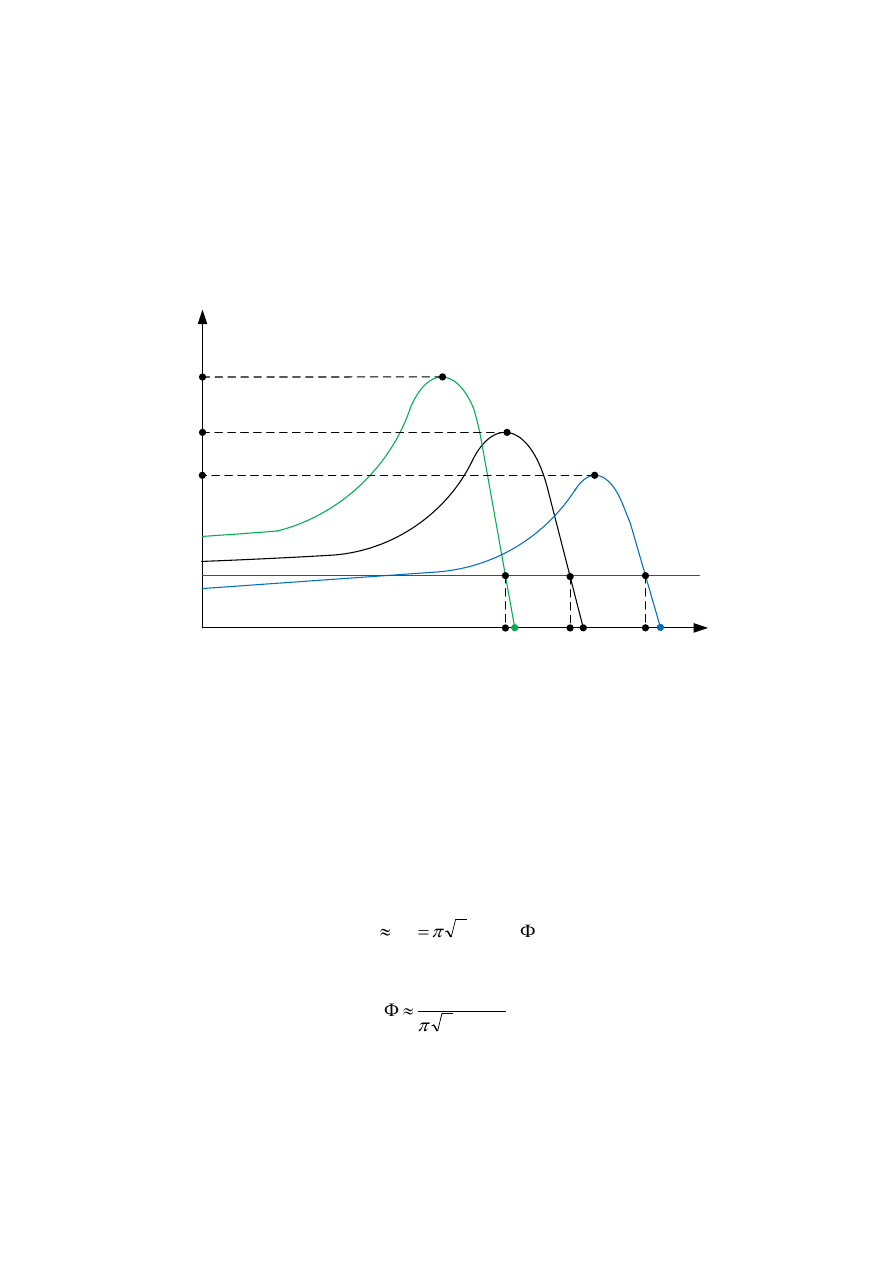
Zgodnie ze wzorem (3.81) moment maksymalny będzie miał wtedy również stałą wartość. Na
rys.3.23. przedstawiono przebieg charakterystyk mechanicznych M=f(n) dla różnych wartości
częstotliwości oraz przy zachowaniu warunku (3.92).
M
n
sN
0
M
kN
M
k
=const.
n
s100
n
P=const.
100Hz
10Hz
50Hz
75Hz
40Hz
30Hz
n
s75
n
s40
n
s30
n
s10
Rys.3.23. Przebieg charakterystyk mechanicznych M=f(n) dla różnych wartości częstotliwości.
Przy bardzo małych częstotliwościach moment maksymalny ulega zmniejszeniu, gdyż
pojawia się tu wpływ pominiętej rezystancji stojana przy malejących reaktancjach. Stały
stosunek napięcia do częstotliwości jest utrzymywany przy częstotliwościach mniejszych od
znamionowej. Przy częstotliwościach większych od znamionowej należy utrzymywać stałą
wartość napięcia zasilającego równą napięciu znamionowemu, a więc moment krytyczny
będzie wtedy malał.
3.6.2 Regulacja prędkości przez zmianę liczby par biegunów
Regulację prędkości przez zmianę liczby par biegunów stosuje się tylko w silnikach
klatkowych, gdyż wystarczy zmieniać liczbę par biegunów stojana, a uzwojenie klatkowe
wirnika automatycznie dostosowuje się pod względem liczby par biegunów do pola
wirującego stojana. W silnikach pierścieniowych należałoby zmieniać również liczbę par
biegunów w wirniku. Silniki indukcyjne, w których skokowa regulacja prędkości obrotowej
odbywa się przez zmianę liczby par biegunów nazywamy silnikami wielobiegowymi. Silniki
te znalazły zastosowanie szczególnie do napędu obrabiarek, gdyż umożliwiają zmniejszenie
kosztów przekładni mechanicznej. Najczęściej stosowany jest silnik dwubiegowy o zakresie
regulacji 2:1. Posiada on jedno uzwojenie przełączalne w stojanie. W silnikach trójbiegowych
ułożone są w tych samych żłobkach dwa uzwojenia, z których jedno jest przełączalne.
W silnikach czterobiegowych, każde z dwóch uzwojeń jest przełączalne na dwie różne
prędkości obrotowe ( np. 3000, 1500, 1000 i 500 obr/min).
Zasadę zmiany liczby par biegunów dla jednej fazy uzwojenia stojana przedstawiono na
rys.3.24.
a)
N
N
S
S
1
2
3
4
U1
I
U2
1
2
3
4
I
I
I
I
p=2
b)
N
S
1
2
3
4
U1
I
U2
1
2
3
4
I
I
I
I
p=1
Rys.3.24. Zmiana liczby par biegunów dla jednej fazy uzwojenia stojana.
Przebieg zjawisk zachodzących przy zmianie liczby par biegunów przedstawiono na rys. 3.25
M
p=1
n
s
=1500obr/min
0
M
m
p=2
n
s
=3000obr/min
n
Rys.3.25. Charakterystyki mechaniczne przy zmianie liczby par biegunów z mniejszej na większą
i odwrotnie.
Jeżeli silnik pracuje przy prędkości odpowiadającej większej liczbie par biegunów (mniejsza
prędkość obrotowa), to w chwili przełączenia na mniejszą liczbę par biegunów (większą
prędkość), pojawia się zgodnie ze wzorem
m
e
d
M
M
t
d
d
J
M
(3.93)
nadwyżka momentu silnika nad momentem mechanicznym. Moment dynamiczny M
d
jest
wtedy większy od zera czyli
0
t
d
d
i następuje przyśpieszanie układu napędowego
i ustalenie się punktu pracy w nowym stanie równowagi.
Natomiast jeżeli silnik pracuje przy prędkości odpowiadającej mniejszej liczbie par
biegunów (większa prędkość obrotowa), to w chwili przełączenia na większą liczbę par
biegunów (mniejszą prędkość), pojawia się zgodnie ze wzorem (3.93) pojawia się nadwyżka
momentu mechanicznego nad momentem elektromagnetycznym silnika. Moment dynamiczny
M
d
jest mniejszy od zera, czyli
0
t
d
d
i następuje hamowanie układu napędowego. Wirnik
silnika posiada prędkość większą od prędkości synchronicznej pola wirującego i silnik
przechodzi do pracy generatorowej. Po zmniejszeniu się prędkości obrotowej poniżej
synchronicznej, kierunek momentu elektromagnetycznego ulega zmianie i maszyna
przechodzi w stan pracy silnikowej, osiągając prędkość ustaloną w nowym stanie równowagi.
3.6.3 Regulacja prędkości obrotowej przez zmianę poślizgu
Regulacja prędkości przez zmianę napięcia zasilającego
Zmiana napięcia zasilania U
s
powoduje zmianę przebiegu charakterystyk
mechanicznych (rys.3.26.). Zmniejszenie napięcia zgodnie ze wzorem (3.81) powoduje
zmniejszenie się wartości momentu maksymalnego M
k
, przy czym poślizg krytyczny s
k
nie
ulega zmianie.
Istota regulacji prędkości obrotowej wynika z zależności
r
r
s
r
r
r
I
U
c
I
cE
M
cos
cos
1
0
(3.94)
M
s
1
U=U
N
s
kr
n
s
0
M
m
U=0,9U
N
U=0,8U
N
s
N
s
1
s
2
Rys.3.26. Regulacja prędkości przez zmianę napięcia zasilającego.
Jeżeli regulacja prędkości odbywa się w małym zakresie prędkości, to można przyjąć
cos
r
const. Przy obniżeniu napięcia na zaciskach stojana i zachowaniu stałego momentu
obrotowego M=const., niezbędne jest zwiększenie prądu wirnika I
r
. Prąd wirnika określa
zależność
r
s
r
r
r
r
R
s
U
c
X
s
R
s
E
I
2
2
2
0
(3.95)
Ze wzoru (3.95) wynika, że zwiększenie prądu wirnika przy zmniejszeniu napięcia zasilania
U
s
może nastąpić przez zwiększenie poślizgu s. Wzrost prądu wirnika a więc i prądu stojana
powoduje zwiększenie strat mocy w uzwojeniach. Z tych względów niedopuszczalna jest
praca ciągła silnika przy obciążeniu znamionowym i zasilaniu napięciem obniżonym.
Wartość poślizgu s przy obniżonym napięciu dla stałego momentu obciążenia obliczamy
z zależności
.
2
2
2
'
'
2
const
X
s
R
s
R
U
m
M
k
N
r
N
r
sN
s
s
(3.96)
.
2
2
2
'
'
2
const
X
s
R
s
R
U
m
M
k
r
r
s
s
s
(3.97)
Dzieląc stronami oba wyrażenia oraz zakładając że
2
2
2
'
k
r
X
s
R
, otrzymujemy
2
sN
s
N
U
U
s
s
(3.98)
Regulacja prędkości przez zmianę rezystancji w obwodzie wirnika
Ten sposób regulacji prędkości obrotowej stosowany jest w silnikach pierścieniowych
małej mocy. Zaletą tego sposobu regulacji jest jego prostota, natomiast wadą są duże straty
energii oraz mała sztywność charakterystyk mechanicznych.
Włączanie rezystancji w obwód wirnika powoduje zmianę przebiegu charakterystyk
mechanicznych (rys.3.27). Moment maksymalny zgodnie ze wzorem (3.81) nie ulega
zmianie, zmienia się natomiast poślizg krytyczny
k
d
r
k
X
R
R
s
'
'
(3.99)
M
s
1
R
2
R
d1
R
d2
R
d3
s
3
s
2
s
1
s
N
0
M
m
M
k
=const.
Rys.3.27. Regulacja prędkości silnika indukcyjnego pierścieniowego przez zmianę rezystancji
w obwodzie wirnika.
Jeżeli przy stałym napięciu zasilania moment obciążenia mechanicznego jest stały, to
zgodnie ze wzorem
.
cos
0
const
I
cE
M
r
r
r
(3.100)
wynika warunek I
r
= const. Dla utrzymania stałej wartości prądu wirnika przy M = const.
wynika, że moc elektromagnetyczna
.
const
M
P
s
(3.101)
wobec stałej prędkości kątowej synchronicznej jest również stała.
Rezystancję R
r
regulatora prędkości w przypadku regulacji przy stałym momencie
hamującym oblicza się w następujący sposób. Stałej wartości momentu przy rezystancji
obwodu wirnika R
r
odpowiada poślizg s i stała wartość mocy elektromagnetycznej
s
R
I
m
P
r
r
r
2
(3.102)
Jeżeli w obwód wirnika zostanie włączona rezystancja dodatkowa R
d
to przy stałej wartości
momentu wystąpi poślizg s
d
, któremu odpowiada moc elektromagnetyczna
d
d
r
r
r
s
R
R
I
m
P
2
(3.103)
Wobec równości mocy elektromagnetycznej i równości prądów wirnika, znając
rezystancje wirnika R
r
i odpowiadający jej poślizg s, rezystancję dodatkową R
d
dla
osiągnięcia poślizgu s
d
obliczymy z zależności
r
d
d
R
s
s
R
1
(3.104)
Sprawność silnika przy regulacji prędkości przez zmianę rezystancji w obwodzie wirnika,
przy pominięciu strat w rdzeniu i uzwojeniu stojana oraz strat mechanicznych, będzie
w przybliżeniu równa
s
P
m
n
n
s
P
s
P
P
P
P
P
1
)
1
(
1
2
(3.105)
a więc będzie maleć ze zmniejszaniem się prędkości obrotowej. Przy prędkości obrotowej
równej połowie prędkości synchronicznej, sprawność będzie wynosić ok. 50%. Jest to
regulacja nieekonomiczna, gdyż występują duże straty energii w rezystorze regulacyjnym.
3.7 ROZRUCH SILNIKÓW INDUKCYJNYCH
Rozruchem silnika nazywa się stan pracy od chwili załączenia napięcia do chwili
osiągnięcia przez silnik ustalonej prędkości obrotowej, określonej parametrami zasilania
(amplituda i częstotliwość napięcia ) i parametrami obciążenia (moment bezwładności i
moment mechaniczny na wale maszyny)
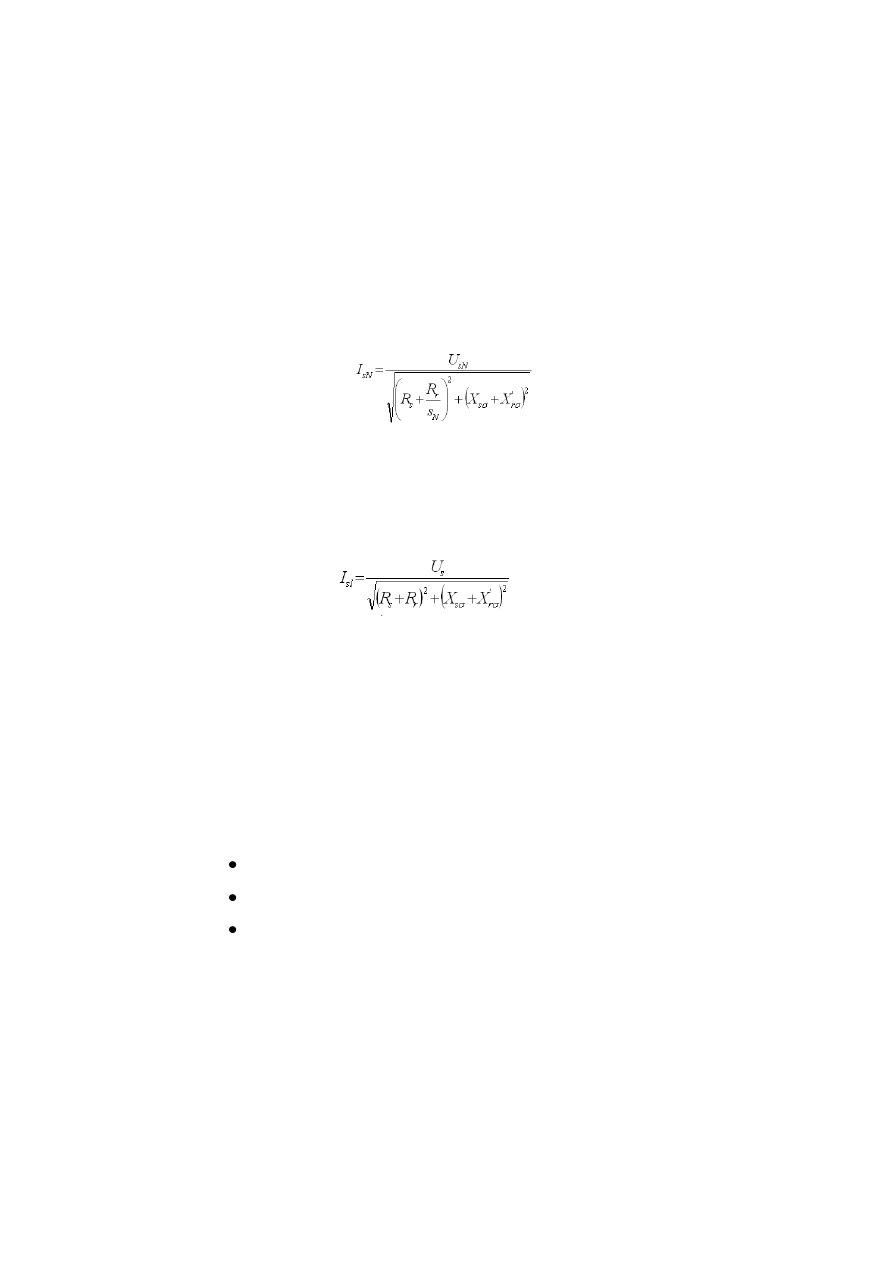
Prąd stojana po pominięciu gałęzi poprzecznej w schemacie zastępczym(rys.3.10) przy pracy
znamionowej określony jest zależnością
2
'
2
r
s
N
r
s
sN
sN
X
X
s
R
R
U
I
(3.106)
Przy pracy znamionowej poślizg silnika s
N
jest rzędu 0.01-0.08 i rezystancja wirnika jest
duża. Natomiast przy rozruchu prędkość silnika jest równa zeru a poślizg s =1 a rezystancja
wirnika jest dużo mniejsza niż przy pracy znamionowej. Wówczas prąd stojana zwany
prądem rozruchowym wynosi
2
'
2
r
s
r
s
s
sl
X
X
R
R
U
I
(3.107)
i jest 5-8 krotnie większy od prądu znamionowego.
Rozruch silników klatkowych
Jak wynika ze wzoru (3.107) rozruchu silników klatkowych możemy dokonać następującymi
sposobami:
a) stosując rozruch bezpośredni,
b) przez włączenie dodatkowej impedancji w obwód stojana,
c) przez obniżenie napięcia zasilającego poprzez zastosowanie,
przełącznika gwiazda-trójkąt,
autotransformatora,
sterowników napięcia.
Rozruch bezpośredni
Rozruch bezpośredni jest najprostszym i dlatego najczęściej stosowanym sposobem
rozruchu silników indukcyjnych klatkowych. Wadą rozruchu bezpośredniego jest duży prąd
rozruchowy, który powoduje duże spadki napięć w sieci, co ma niekorzystny wpływ na pracę
innych odbiorników. Przepisy ograniczają moc znamionową silników uruchomianych
bezpośrednio z sieci publicznych niskiego napięcia , w których dopuszczalny spadek napięcia
wynosi 5%, do mocy nie większej od 5.5kW.
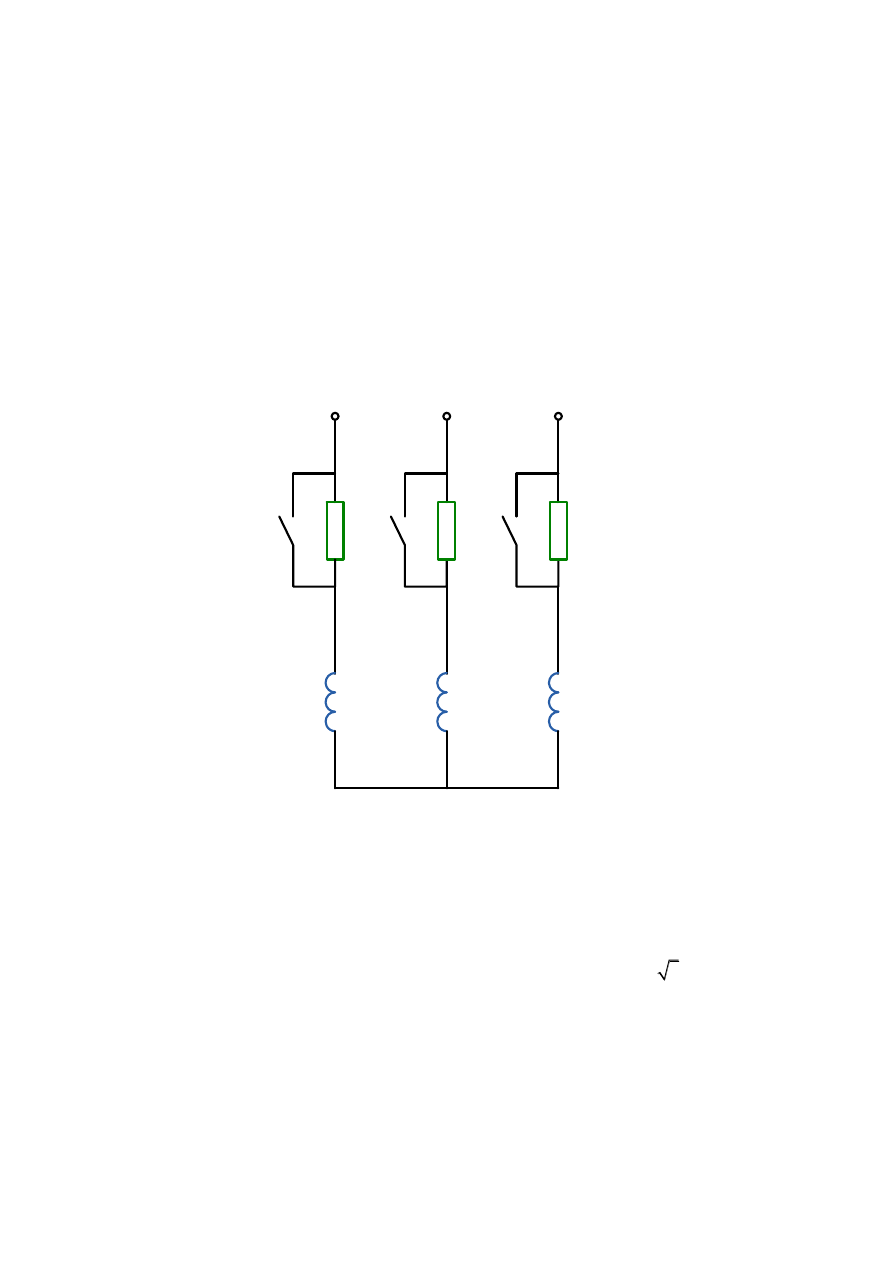
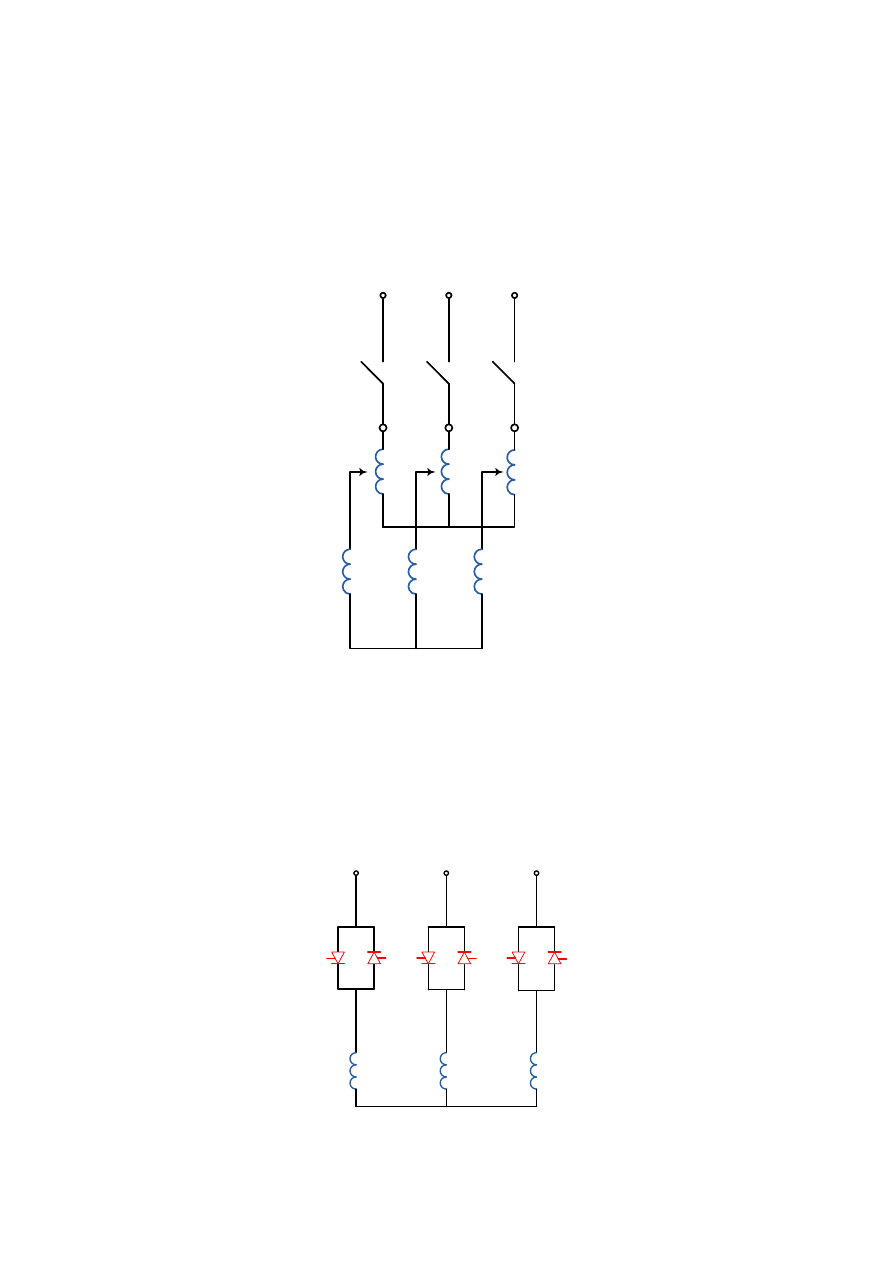
Rozruch przez włączenie dodatkowych impedancji w obwód stojana
Włączenie dodatkowych impedancji (rys.3.28.), zwykle rezystorów lub dławików,
szeregowo w obwód stojana może być traktowane jako zwiększenie całkowitej impedancji
silnika, co powoduje zmniejszenie prądu rozruchowego. Jednocześnie występuje spadek
napięcia na włączanej impedancji i maleje napięcie na zaciskach silnika a zatem zmniejsza się
moment rozruchowy.
L
1
L
2
L
3
U
1
U
2
V
1
V
2
W
1
W
2
K
(R
d
, X
d
)
K
K
Rys.3.28. Rozruch silnika klatkowego poprzez włączenie impedancji w obwód uzwojenia stojana.
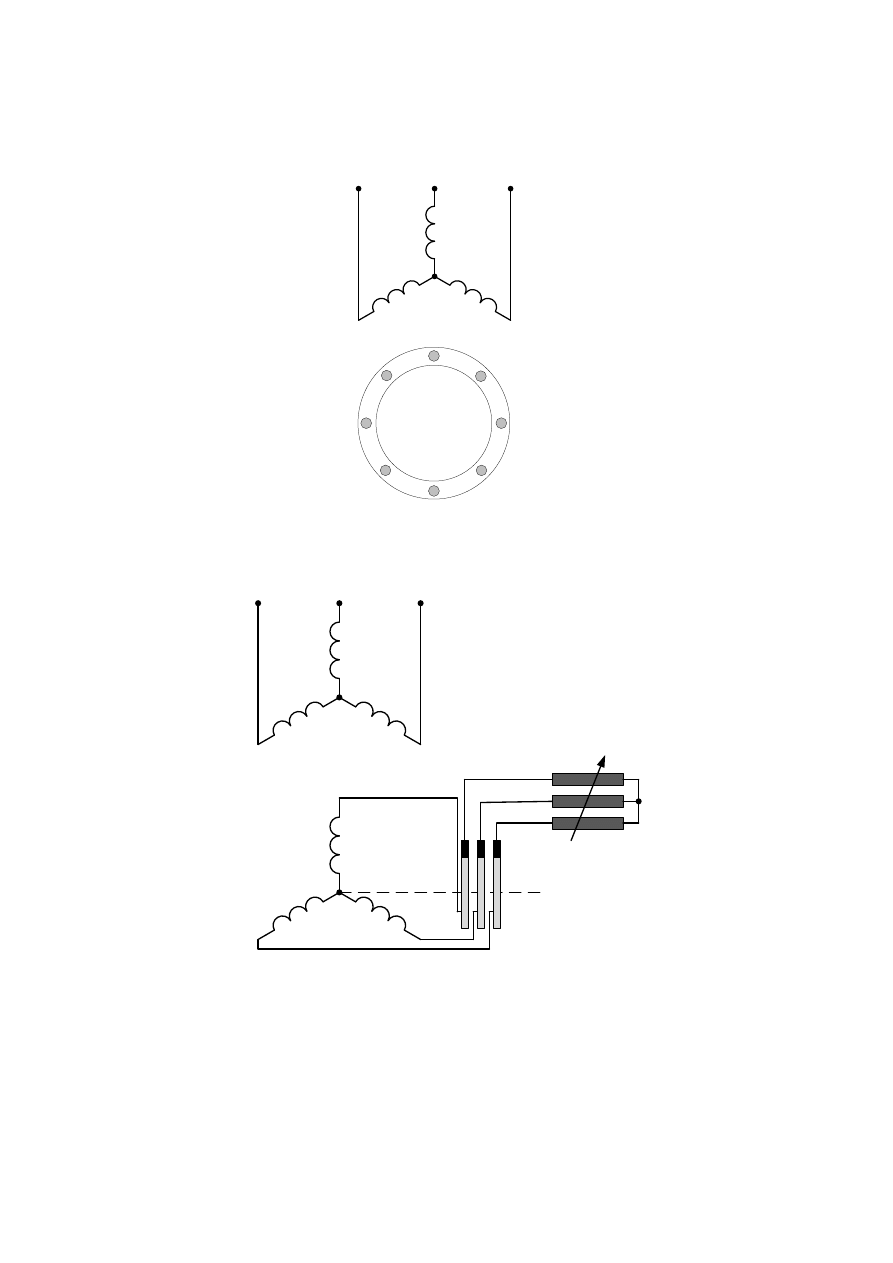
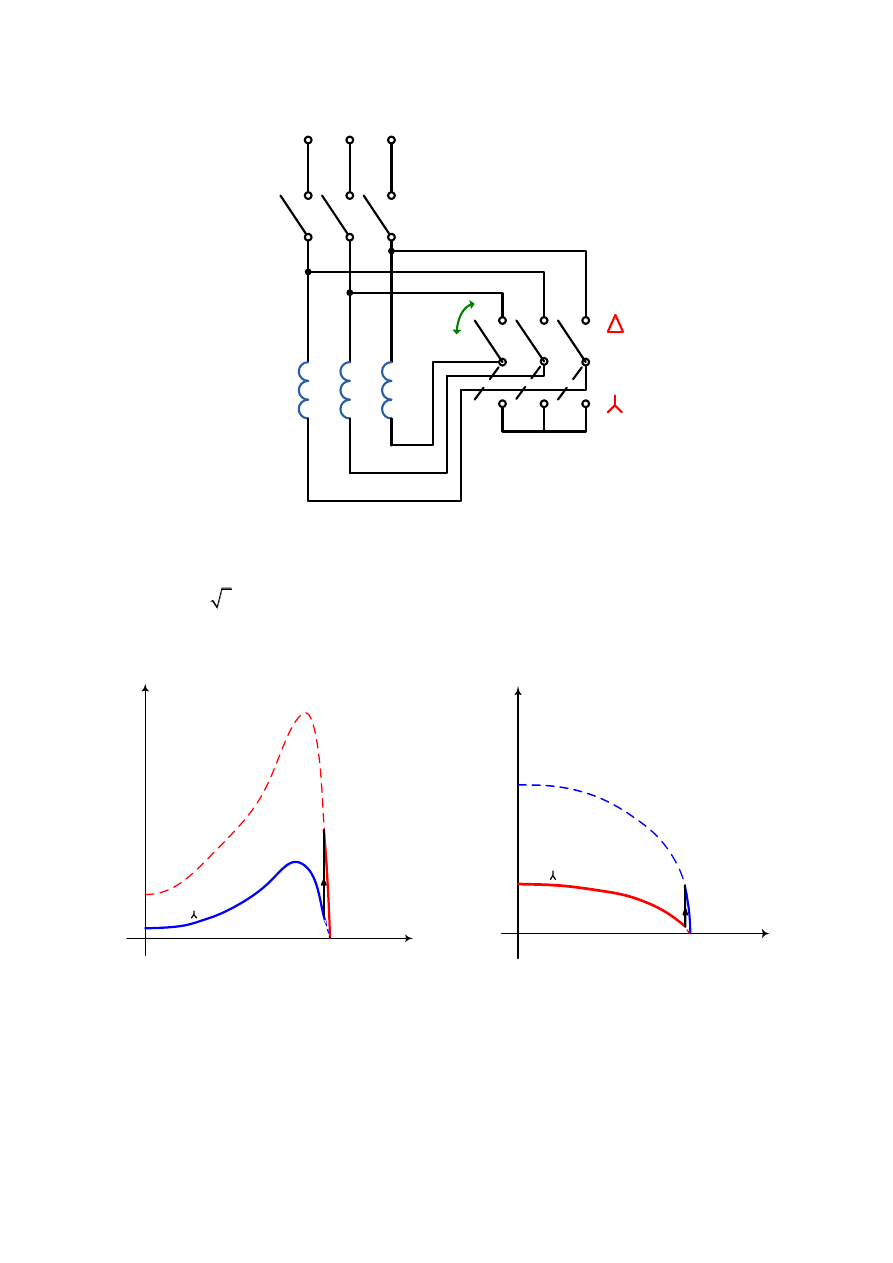
Rozruch za pomocą przełącznika gwiazda-trójkąt
Jest to najczęściej stosowany sposób rozruchu silników małej i średniej mocy
o napięciach zasilających poniżej 1 kV. Podczas rozruchu uzwojenie stojana najpierw łączy
się w gwiazdę (rys.3.29.), wówczas napięcie fazowe uzwojenia stojana jest 3 razy mniejsze
od napięcia znamionowego.
U1
V1 W1
U2
V2 W2
K
L1
L2
L3
Rys.3.29. Schemat układu połączeń do rozruchu silnika indukcyjnego klatkowego za pomocą
przełącznika gwiazda-trójkąt
Tym samym moment rozruchowy zmniejsza się 3-krotnie (rys.3.30.a)), zaś prąd fazowy
zmniejsza się 3 (rys.3.30b)) razy a prąd pobierany z sieci zmniejsza się 3-krotnie.
a)
M
n
s
M
M
D
n
b)
I
s
n
s
I
I
D
Rys.3.30. Przebieg momentu i prądu rozruchowego przy rozruchu za pomocą przełącznika gwiazda-
trójkąt; a) przebieg momentu w funkcji prędkości obrotowej, b) przebieg prądów przewodowych w
funkcji prędkości obrotowej,
Przy prędkości obrotowej zbliżonej do prędkości znamionowej, uzwojenie stojana łączy się w
trójkąt co odpowiada pracy normalnej silnika.
Rozruch za pomocą autotransformatora
Rozruch za pomocą autotransformatora (rys.3.31) jest stosowany do silników dużej
mocy i wysokim napięciu znamionowym. Przy rozruchu z zastosowaniem autotransformatora,
prąd pobierany z sieci jak i moment rozruchowy maleje z kwadratem napięcia zasilającego
uzwojenie stojana.
U
1
U
2
V
1
V
2
W
1
W
2
K
Atr.
L
1
L
2
L
3
Rys.3.31. Schemat układu połączeń do rozruchu silnika indukcyjnego klatkowego za pomocą
autotransformatora.
Rozruch za pomocą sterowników napięcia
Schemat układu do rozruchu silnika indukcyjnego za pomocą sterowników napięcia
przedstawiono na rys.3.32.
L1
T1
T4
T3
T6
T2
U2
V2
W1
W2
T5
V1
U1
L2
L3
Rys.3.32. Układ do rozruchu silnika indukcyjnego klatkowego za pomocą sterowników napięcia.
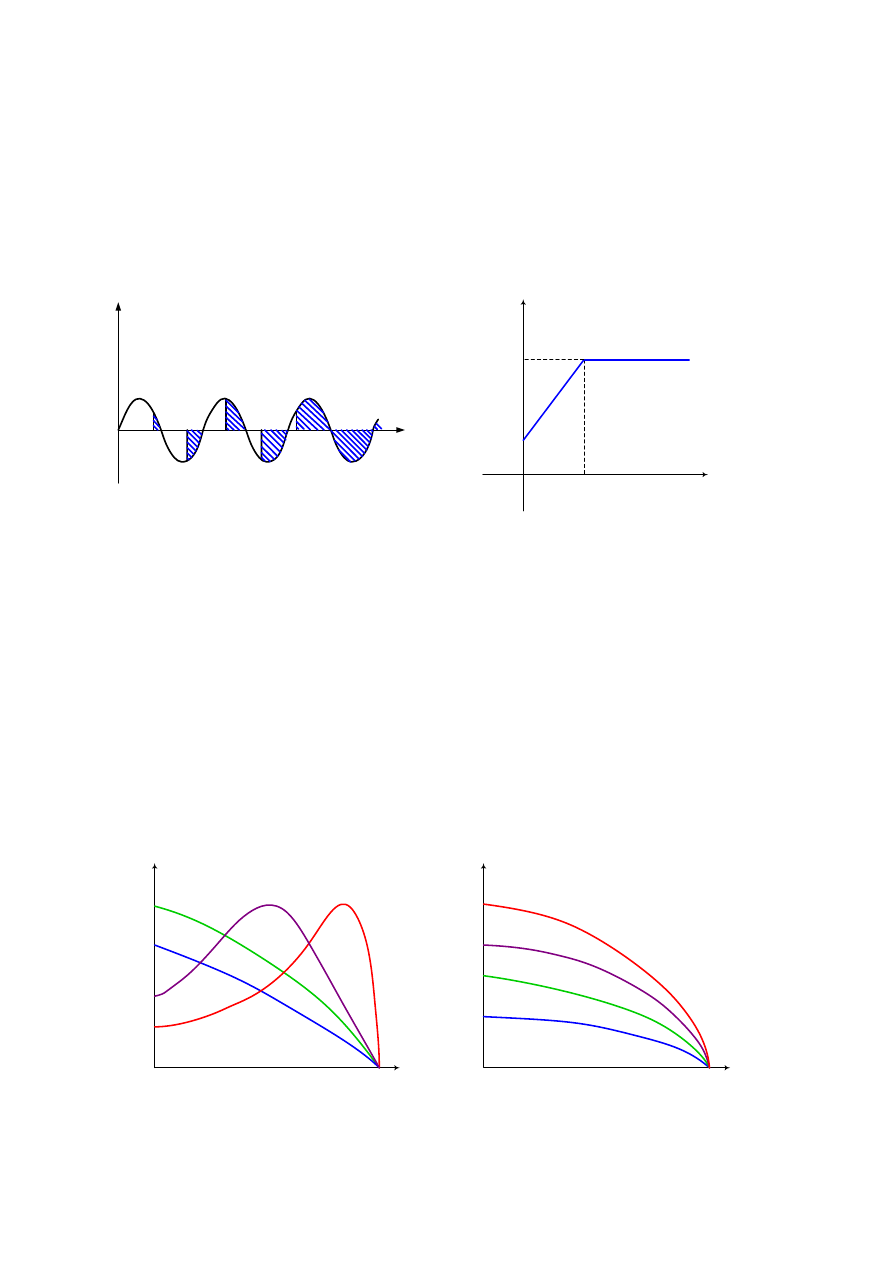
Sterowniki napięcia są to układy energoelektroniczne zbudowane w oparciu
o elementy półprzewodnikowe najczęściej tyrystory pracujące w układzie antyrównoległym.
Podczas rozruchu amplituda napięcia podawanego na uzwojenie silnika zmienia się w czasie
np. w sposób liniowy (rys.3.33), co uzyskuje się poprzez regulację kąta wysterowania
tyrystorów.
a)
U
t
b)
U
t
U
sN
U
min
t
1
Rys.3.33. Przebieg napięcia zasilania podczas rozruchu silnika indukcyjnego za pomocą
sterowników napięcia; a) zasada regulacji napięcia, b) przebieg amplitudy napięcia w funkcji czasu.
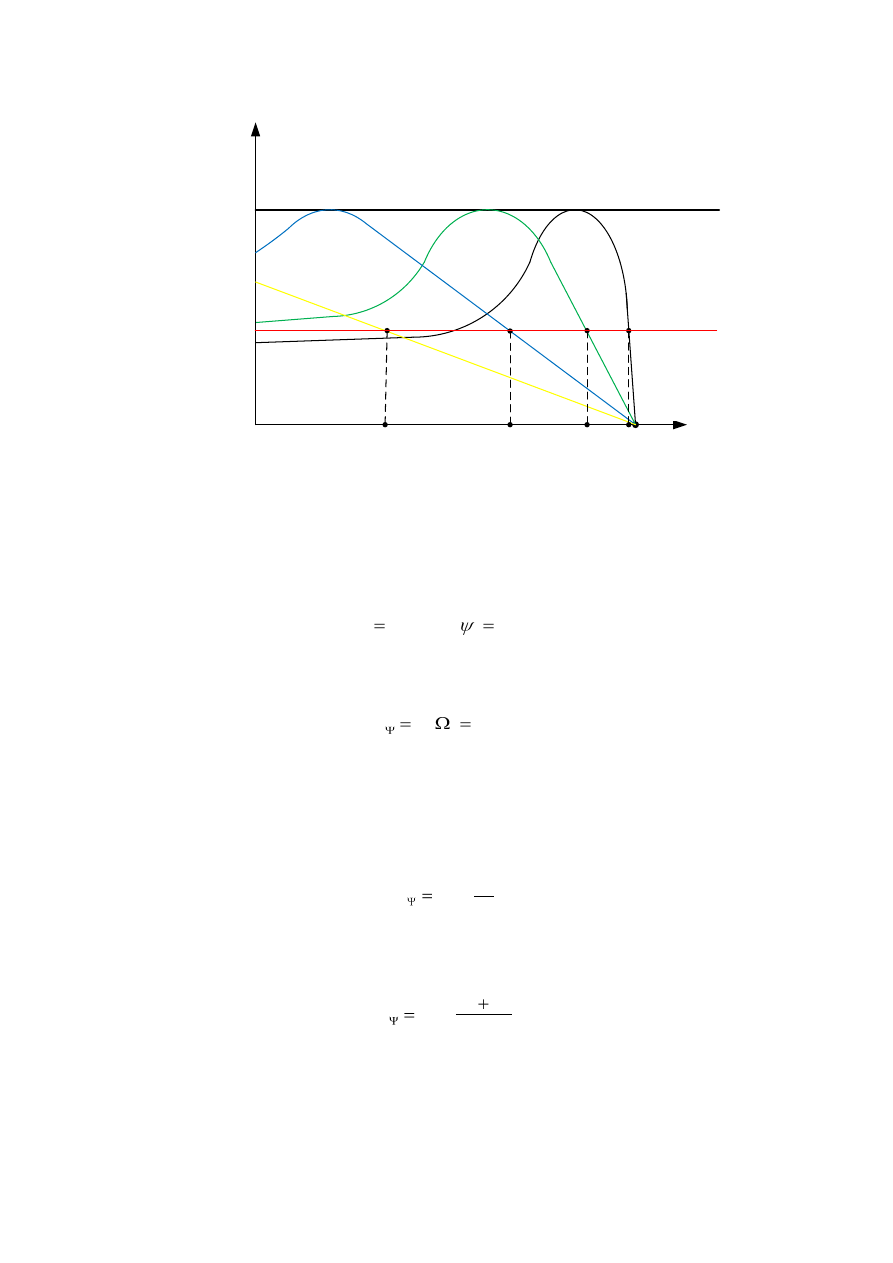
Rozruch silników pierścieniowych
Rozruch silników pierścieniowych przeprowadza się przez włączenie rezystancji
w obwód wirnika. Włączenie rezystancji w obwód wirnika powoduje ze zgodnie ze wzorem
(3.99) zwiększenie się poślizgu krytycznego oraz zmniejszenie prądu rozruchowego stojana,
przy czym moment maksymalny nie ulega zmianie. Wzrost rezystancji dodatkowej powoduje
przesuwanie się maksimum momentu w kierunku rosnących wartości poślizgów przy
równoczesnym zmniejszaniu się prądu rozruchowego (rys.3.34.).
a)
M
n
R
d3
R
d2
R
d1
R
r
n
s
b)
R
d1
R
d2
R
d3
R
r
I
s
n
n
s
Rys.3.34. Wpływ rezystancji dodatkowej Rd na przebieg momentu i pradu silnika indukcyjnego
pierścieniowego; a) przebiegi momentu w funkcji prędkości, b) przebiegi prądu w funkcji prędkości
obrotowej.
Można tak dobrać wartość rezystancji włączonej w obwód wirnika, że moment
maksymalny wystąpi przy poślizgu s =1. Wówczas moment rozruchowy będzie równy
momentowi maksymalnemu. Dalsze zwiększanie rezystancji powoduje zmniejszanie się
momentu rozruchowego. W praktyce rozruchu silnika pierścieniowego dokonuje się za
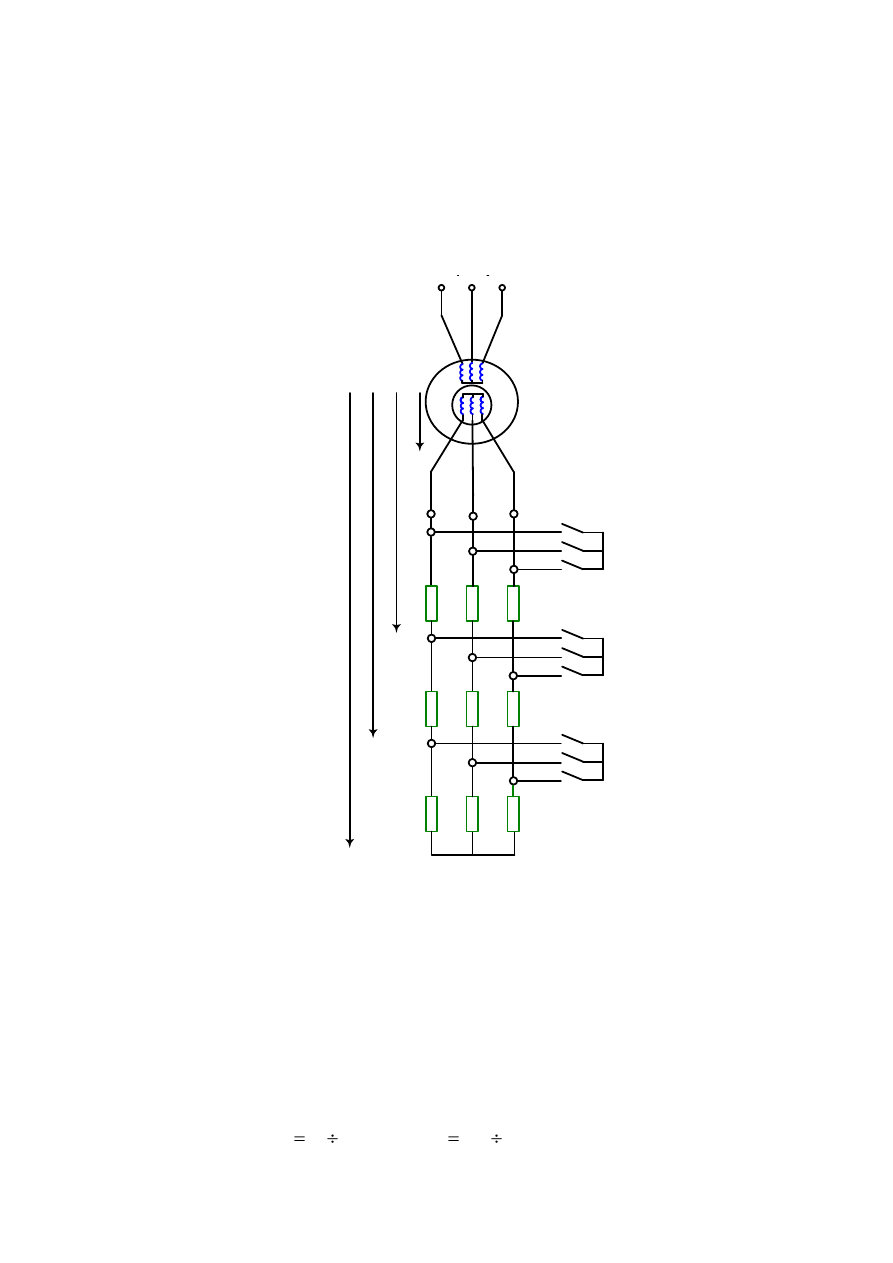
pomocą rezystora sekcyjnego zwanego rozrusznikiem rezystorowym (rys.3.35).
L1 L2
L3
R
d
3
R
d
2
R
d
1
K
L
M
K
1
R
r
K
2
K
3
R
r1
R
r2
R
r3
Rys.3.35. Schemat połączeń do rozruchu silnika indukcyjnego pierścieniowego za pomocą
rozrusznika rezystorowego wielostopniowego.
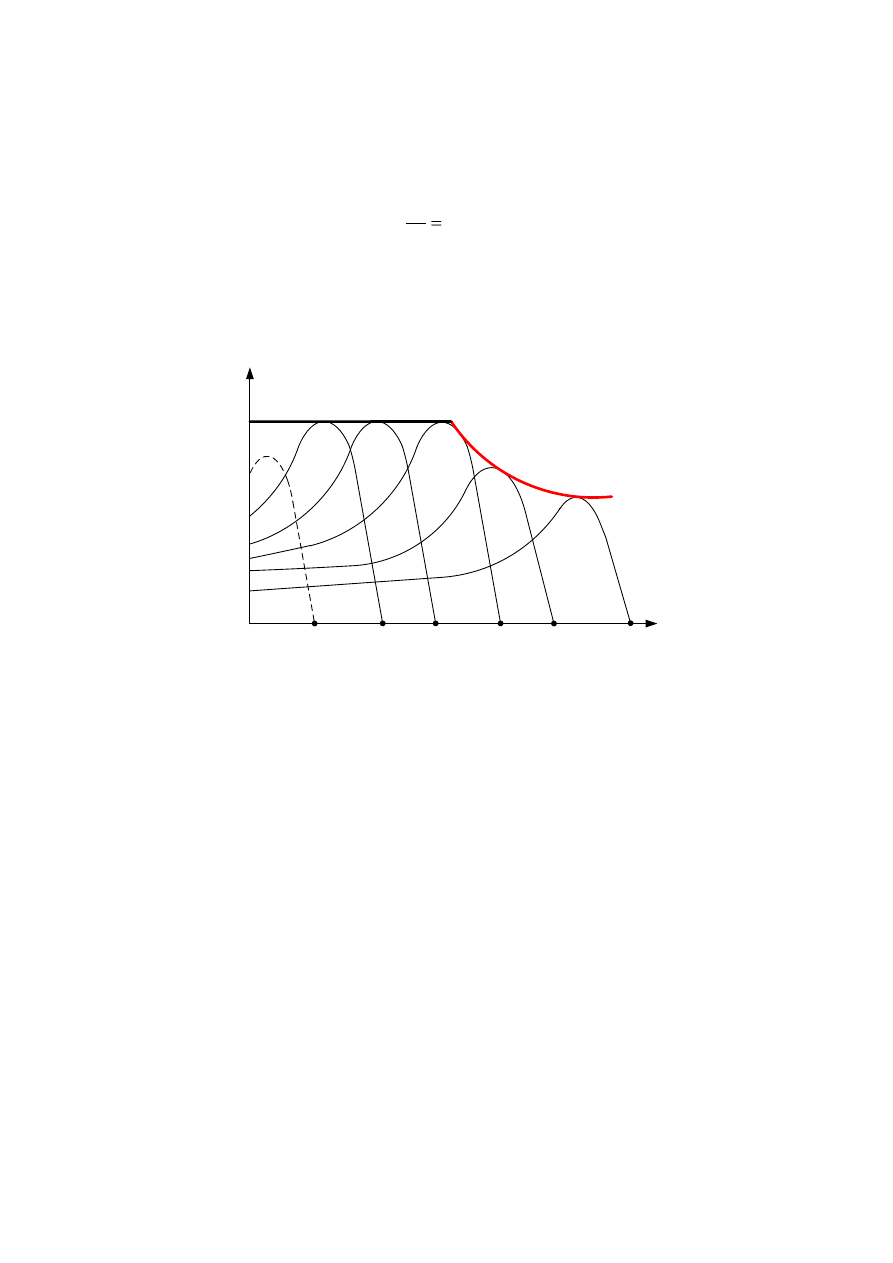
Rozruszniki rezystorowe wielostopniowe pozwalają dowolnie kształtować przebieg
charakterystyk rozruchowych silnika, stosownie do przebiegu momentu hamującego.
Rezystancje na poszczególnych stopniach rozruchowych dobiera się tak, aby w czasie
rozruchu moment zmieniał się na każdym stopniu od wartości maksymalnej M
max
do wartości
minimalnej M
min
(rys.3.26.a)), przy czym wartość minimalna momentu musi być większa od
momentu hamującego. Przy doborze wartości granicznych momentu rozruchowego należy
zachować warunki:
N
M
M
)
5
,
2
2
(
max
,
N
M
M
)
2
.
1
1
.
1
(
min
.
R
d1
R
d2
R
d3
R
r
I
s
n
M
n
R
d3
R
d2
R
d1
R
r
M
max
M
min
M
m
I
max
I
min
Rys.3.36. Przebiegi momentu i prądu silnika indukcyjnego pierścieniowego przy zastosowaniu
rozrusznika rezystorowego wielostopniowego.
Im mniejsze są różnice między momentem maksymalnym a minimalnym tym większa musi
być liczba stopni rozruchowych i rozruch jest bardziej płynny.
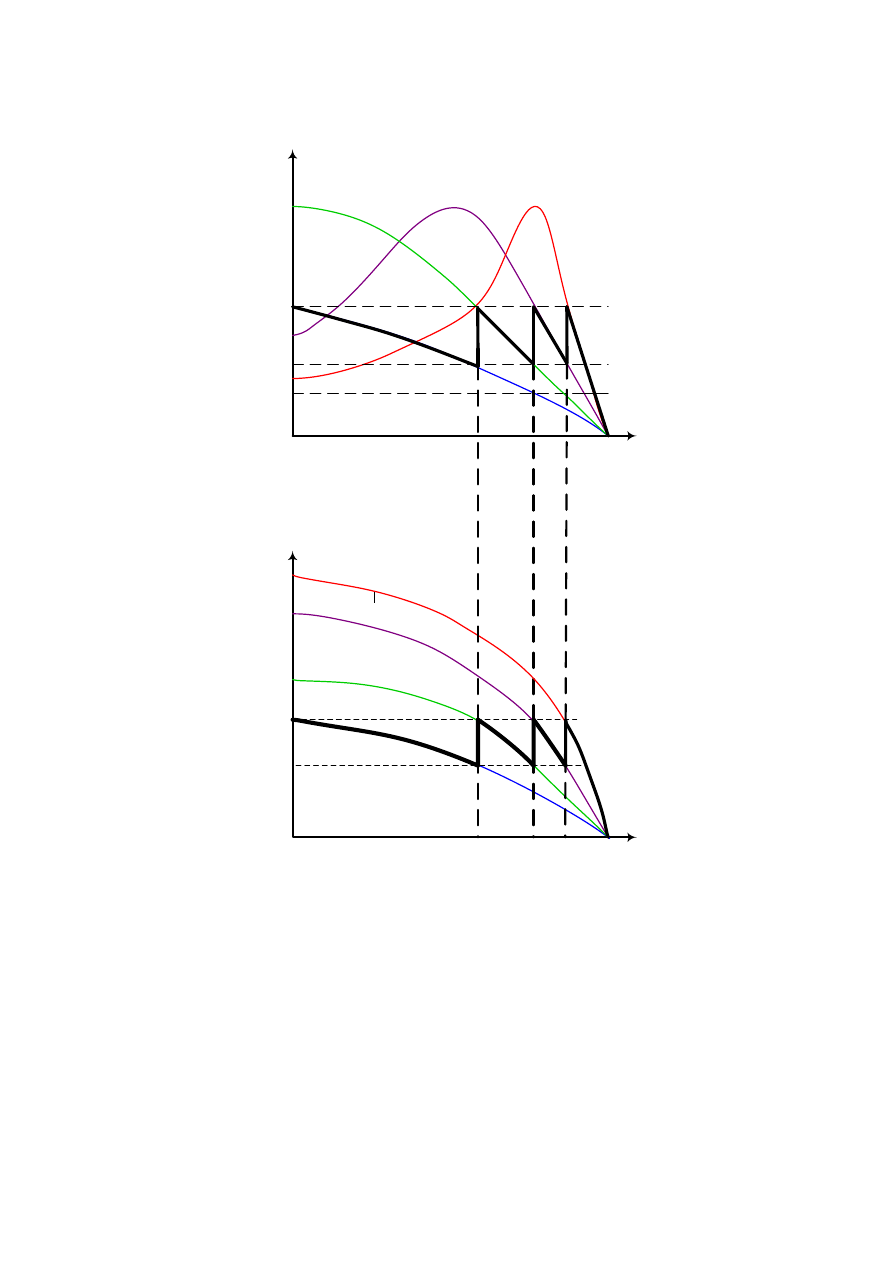
Zamiast rozruchu za pomocą rozrusznika wielostopniowego można zastosować rozruch
rezystorowy za pomocą tyrystorowego modulatora rezystancji (rys.3.37.).
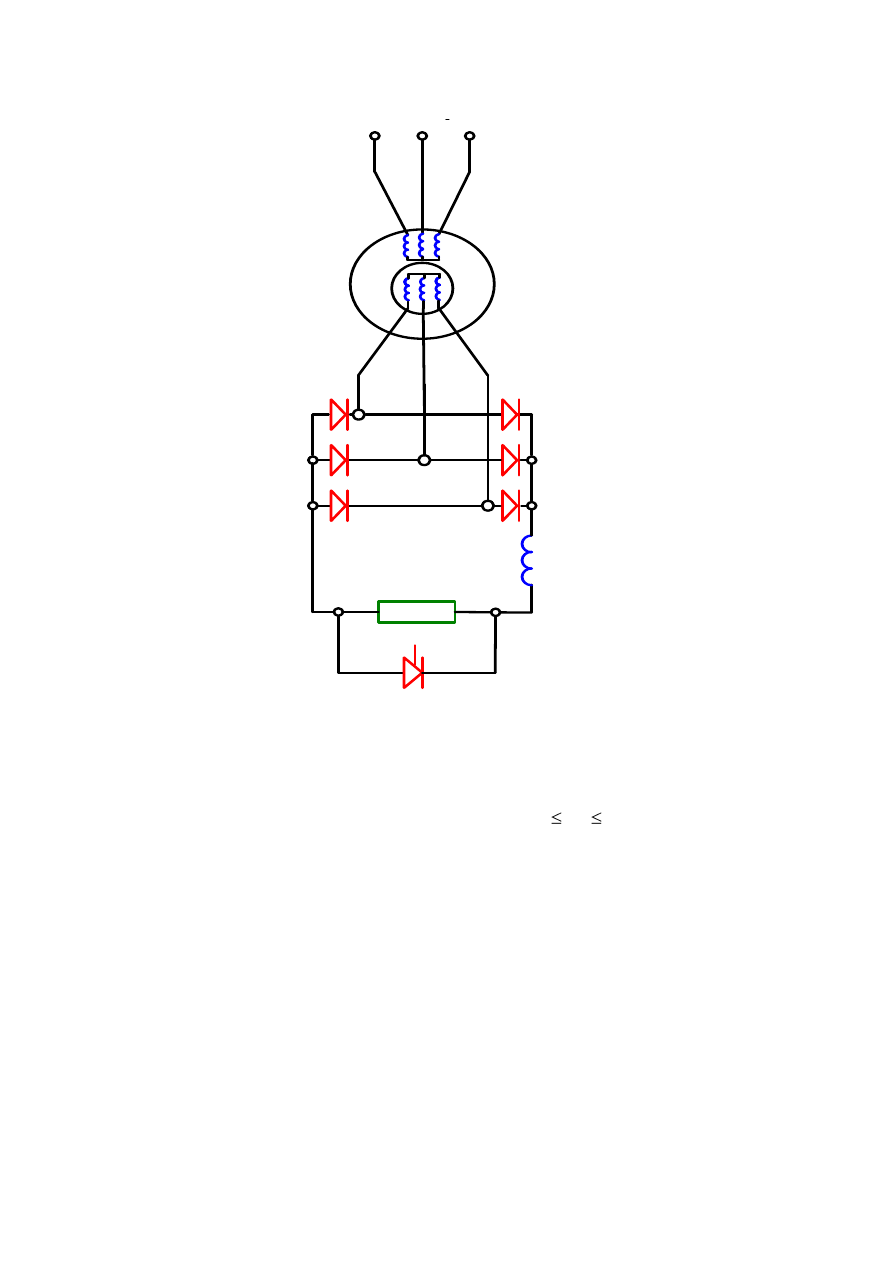
R
D
1
D
3
D
5
D
4
D
6
D
2
T
L
d
L1
L2
L3
Rys.3.37. Rozruch silnika indukcyjnego pierścieniowego za pomocą
tyrystorowego modulatora
rezystancji
Modulator rezystancji jest włączony w obwód wirnika poprzez prostownik diodowy
mostkowy. Równoległe włączenie modulatora do rezystancji R umożliwia uzyskanie
rezystancji modulowanej R
m
, zmieniającej się w granicach 0 R
m
R.
LITERATURA
[1]
Bajorek Z.: Maszyny elektryczne, WNT, Warszawa 1983
[2]
Chapman S.J.: Electric machinery fundamentals, Third Edition, McGraw-Hill Book
Company, Singapore 1999.
[3]
Fitzgerald A. E., Kingsley Ch. Jr., Stephen D. Umans S.D.: Electric machinery, Sixth
edition, McGraw-Hill, USA, New York, 2003.
[4]
Gieras J.F., Wing M.: Permanent magnet motor technology. Design and Application,
Second Edition, Marcel Dekker Inc., New York 2002.
[5]
Krause P.C.: Analysis of electric machinery, McGraw-Hill Book Company, New York
1986.
[6]
Kurdziel R.: Podstawy elektrotechniki, WNT, Warszawa 1972
[7]
Latek W.: Teoria maszyn elektrycznych, WNT, Warszawa 1987
[8]
Plamitzer A.: Maszyny elektryczne, WNT, Warszawa 1982

Projekt „Program Rozwojowy Potencjału Dydaktycznego Politechniki Świętokrzyskiej w Kielcach: kształcenie na miarę sukcesu”
Program Operacyjny Kapitał Ludzki Priorytet IV Działanie 4.1 Poddziałanie 4.1.1
Umowa UDA-POKL.04.01.01-00-175/08-02
Politechnika Świętokrzyska
25-314 Kielce
Al. Tysiąclecia Państwa Polskiego 7
Biuro Projektu - bud. B pok. 324
Projekt współfinansowany przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Wyszukiwarka
Podobne podstrony:
Elektronika 03, Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka, Zadania z Fizyki
antal,elektrotechnika, MASZYNY INDUKCYJNE
DRUTY, maszyny - Silnik asynchroniczny, LABORATORIUM ELEKTROTECHNIKI
Budowa maszyn indukcyjnych 2, ۞ Nauka i Technika, Elektrotechnika, Maszyny elektryczne
Maszyny Elektryczne - Zadanie 7,8, Maszyna Indukcyjna Trójfazowa
Parametry maszyny indukcyjnej, Akademia Morska, 2 rok', Semestr III, II rok Wydział Mech, Maszyny el
Elektronika 03, Mechanika i Budowa Maszyn PWR MiBM, Semestr I, Fizyka, Zadania z Fizyki
Maszyna indukcyjna 2
Podstawowe zależności z teorii maszyn indukcyjnych
Zasada działania maszyny indukcyjnej a
Maszyny indukcyjne
Badanie maszyn indukcyjnych
charakterystyki mechaniczne przy zmianie rezystancji w obwodzie wirnika maszyny indukcyjnej
Maszyny indukcyjne
Maszyna indukcyjna 1 rozwiązanie i parametry
Maszyny indukcyjne w napedzie
Maszyny Indukcyjne
maszyny indukcyjny1
więcej podobnych podstron