SPRAWOZDANIE
1. Cel
ć
wiczenia.
Identyfikacja modelu
ż
urawia na
ś
ciennego poprzez pomiar sił obci
ąż
aj
ą
cych
urz
ą
dzenie podczas podnoszenia ładunku oraz teoretyczne oszacowanie jego
działania.
2. Przebieg
ć
wiczenia
Podczas
ć
wiczenia wyznaczyli
ś
my pr
ę
dko
ść
podnoszenie
ż
urawia mierz
ą
c czas,
w którym ładunek przebył jeden metr.
S
1 m
⋅
:=
t
12 s
⋅
:=
vp
S
t
5
m
min
⋅
=
:=
Nast
ę
pnie za pomoc
ą
siłomierza podł
ą
czonego do komputera PC wykonali
ś
my
pomiar przebiegu siły działaj
ą
cej na
ż
uraw podczas podnoszenia. Wyniki pomiaru
przedstawia wykres F(t).
3. Obliczenia
W pierwszym kroku wyznaczamy mas
ę
ładunku z cz
ęś
ci wykresu F(t), gdzie
ładunek ju
ż
si
ę
wyrównowa
ż
ył, mi
ę
dzy 6 a 9,5 sekund
ą
. Siła była mierzona w
kilogramach siły [kG], wi
ę
c jej
ś
rednia arytmetyczna b
ę
dzie równa co do warto
ś
ci
masie w kilogramach [kg].
m
173.6 kg
⋅
:=
Nast
ę
pnie tworzymy wykres siły pochodz
ą
cej od mechanizmu nap
ę
dowego P(t)
odejmuj
ą
c od zmierzonej siły ci
ęż
ar ł
ą
dunku czyli 173,6 kG. Z tego wykresu
mo
ż
emy w prosty sposób wyznaczy
ć
okres drga
ń
licz
ą
c
ś
redni
ą
arytmetyczn
ą
z
21 okresów.
21T
3 s
⋅
:=
21
T
3
21
s
⋅
0.143 s
⋅
=
:=
Obliczamy cz
ę
stotliwo
ść
drga
ń
.
ω
2 π
⋅
T
43.982
1
s
=
:=
f
1
T
7 Hz
⋅
=
:=
Wyznaczamy logarytmiczny dekrement tłumienia.
n
Xn
h
1
457 1,4593693
2
371 0,4479971
3
348 1,4225977
4
284 0,7814798
5
254 -0,581466
6
276 1,9130533
7
210 -0,132079
8
214 1,2501315
9
179 0,8735354
10
158 -0,951314
11
181 0,9071498
12
159 0,1333374
13
156 2,0137745
14
117 -0,235316
15
121
δ
=
ln
Xn
Xn
=
h T
⋅
h
=
1
T
ln
Xn
Xn
np.
ln
457
371
T
1.459
1
s
=
hśr
=0,664
1
s
Dziel
ą
c warto
ś
ci siły przez mas
ę
otrzymujemy wykres przyspieszenia a(t).
Poprzez jego scałkowanie numeryczne metod
ą
trapezów otrzymujemy wykres
pr
ę
dko
ś
ci v(t).
Całkuj
ą
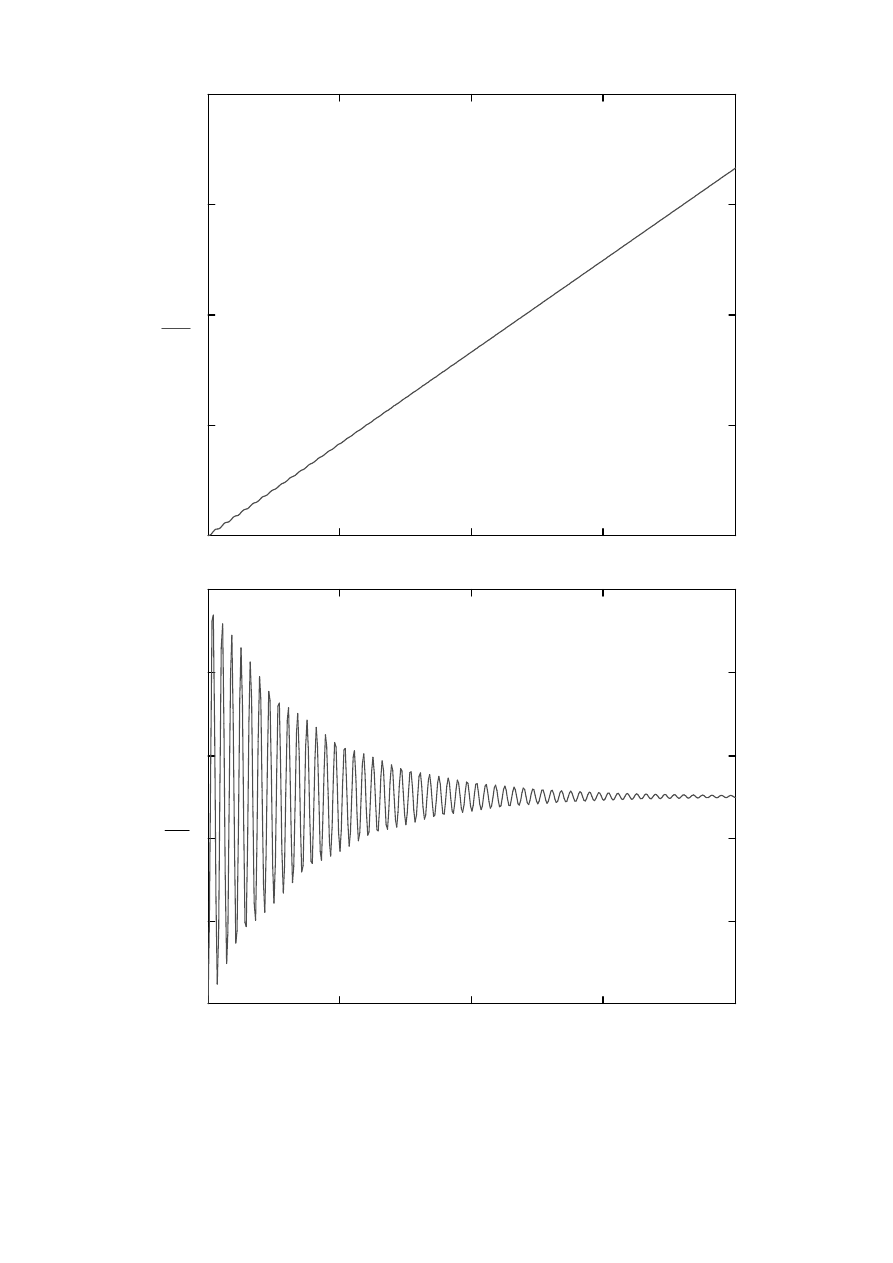
c ponownie otrzymujemy wykres przemieszczenia x(t).
Wykresy przewidywane otrzymamy z poni
ż
szych równa
ń
podstawiaj
ą
c do nich wcze
ś
niej obliczone
warto
ś
ci pr
ę
dko
ś
ci podnoszenia, cz
ę
stotliwo
ś
ci drga
ń
oraz współczynnika tłumienia.
x t
( )
vp t
e
h
−
t
⋅
ω
sin ω t
⋅
(
)
⋅
−
⋅
:=
v t
( )
vp 1 e
h
−
t
⋅
h
ω
sin ω t
⋅
(
)
⋅
cos ω t
⋅
(
)
−
⋅
+
⋅
:=
a t
( )
vp e
h
−
t
⋅
⋅
ω
2
h
2
−
ω
sin ω t
⋅
(
)
⋅
2 h
⋅
cos ω t
⋅
(
)
⋅
+
⋅
:=
0
2
4
6
8
0
20
40
60
80
x t
( )
t
WYKRESY PRZEWIDYWANE
[cm]
0
2
4
6
8
0
2
4
6
8
10
v t
( )
t
[
m
min
]

0
2
4
6
8
4
−
2
−
0
2
4
a t
( )
t
[
m
s
2
]
WNIOSKI:
Wykresy rzeczywiste i przewidywane s
ą
zbli
ż
one jednak w rzeczywisto
ś
ci osi
ą
gamy
mniejsze przyspieszenia, pr
ę
dko
ś
ci oraz przemieszczenia. Powodem tego mo
ż
e by
ć
uproszczenie modelu dynamicznego
ż
urawia. Masa obci
ąż
enia została wyznaczona
na podstawie wykresu pomiarowego i jej niedokładne wyznaczenie niesie za sob
ą
niedokładno
ść
kolejnych wykresów rzeczywistych.
Wyszukiwarka
Podobne podstrony:
Mathcad, d2
Mathcad przepona kotwiczna projekt 2
Mathcadtymczasowy
d2 (3)
Mathcad fundamenty ramowe
Chopin Bourrée No 2, Op D2 No 2
Mathcad Projekt metal
Mathcad TW kolos 2
Mathcad Sprzeglo id 287200
Mathcad filarek wewnetrzny 1 kondygnacj
5 Mathcad Zapis i odczyt danych
Mathcad filarek zewnetrzny 1 kondygnacj
mathcad 5
p4 OBLICZENIA W PROGRAMIE MATHCAD
Mathcad opracowanie
Mathcad projekt
Mathcad Cw3
Mathcad pasowaz
więcej podobnych podstron