Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
100
XII. LEPKOSPRĘŻYSTOŚĆ
1. Liniowe ciała z pamięcią
Ciało liniowo sprężyste posiada pamięć prostą, czyli pamięta jedną konfigurację którą jest bez-
odkształceniowy stan początkowy. Istnieją materiały, które pamiętają przeszłość. Wśród tej gru-
py materiałów można wyróżnić takie dla których przyczyna i skutek są liniowo zależne.
W rozdziale tym rozważane są materiały, dla których zależność pomiędzy naprężeniem i od-
kształceniem jest liniowa ale jednocześnie zależna od czasu. Dla tej klasy materiałów aktualny
stan odkształcenia zależy od całej historii obciążenia. Materiały takie zwane są materiałami lep-
kosprężystymi.
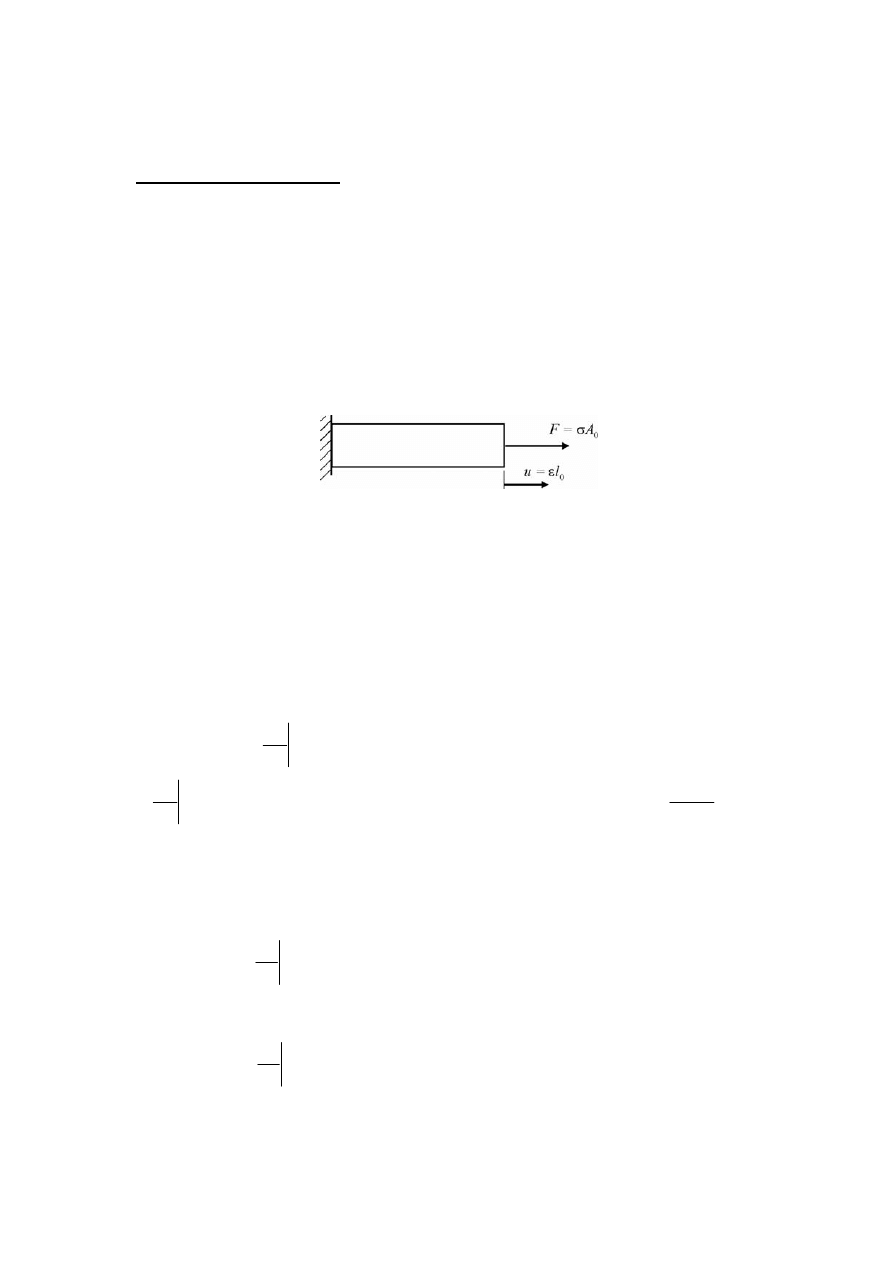
Jako ilustrację problemu rozważamy przykład pręta rozciąganego siłą osiową F jak to pokazano
na rys. 12.1. W chwili t siła o wartości F(t) wywoła wydłużenie u(t). Wydłużenie u(t) zależy od
historii obciążenia aż do chwili t. Gdy funkcja F(t) jest ciągła i różniczkowalna, to w ciągu nie-
skończenie małego przedziału czasu dτ w chwili τ<t przyrost obciążenia wyniesie (dF/dt)dτ.
Przyrost ten działa na pręt wywołując przyrost wydłużenia du(t) w chwili t ze współczynnikiem
proporcjonalności C zależnym od wielkości przedziału czasu t
−
τ. Zatem
τ
τ
−
=
τ
=
d
d
d
)
(
)
(
d
t
t
F
t
C
t
u
,
(12.1)
gdzie
τ
=
t
t
F
d
d
jest wartością pochodnej w chwili t=τ; pochodna ta jest równa
τ
τ
d
)
(
dF
jeśli zmien-
ną t zastąpimy przez τ przed różniczkowaniem.
Ponieważ siła osiowa F(t) jest proporcjonalna do naprężenia a przemieszczenie u(t) proporcjo-
nalne do odkształcenia, w dalszym ciągu będziemy używali wielkości lokalnych, a w takim razie
równanie (1) zapiszemy w postaci
τ
σ
τ
−
=
ε
τ
=
d
d
d
)
(
)
(
d
t
t
t
c
t
,
(12.2)
Sumując przyrosty odkształceń w ciągu całej historii otrzymujemy
τ
σ
τ
−
=
ε
τ
=
∫
d
d
d
)
(
)
(
0
t
t
t
t
c
t
.
(12.3)
Jeżeli „obciążeniem” pręta będzie zmienne w czasie odkształcenie (przemieszczenie) to wów-
czas odwracają się role odpowiednio naprężenia i odkształcenia w równaniu (3), stąd
Rys. 12.1.
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
101
τ
ε
τ
−
=
σ
τ
=
∫
d
d
d
)
(
)
(
0
t
t
t
t
k
t
.
(12.4)
Powyższe równania są liniowe, przy czym
c(t) – funkcja pełzania; jest wydłużeniem wywołanym nagłym przyłożeniem naprężenia o
intensywności jednostkowej w chwili t=0,
),
(
)
(
t
H
t
=
σ
k(t) – funkcja relaksacji; jest naprężeniem wywołanym odkształceniem jednostkowym za-
danym w chwili t=0,
),
(
)
(
t
H
t
=
ε
gdzie funkcja Heaviside’a jest równa
⎪
⎩
⎪
⎨
⎧
<
=
>
=
0
dla
0
0
dla
2
/
1
0
dla
1
)
(
t
t
t
t
H
.
(12.5)
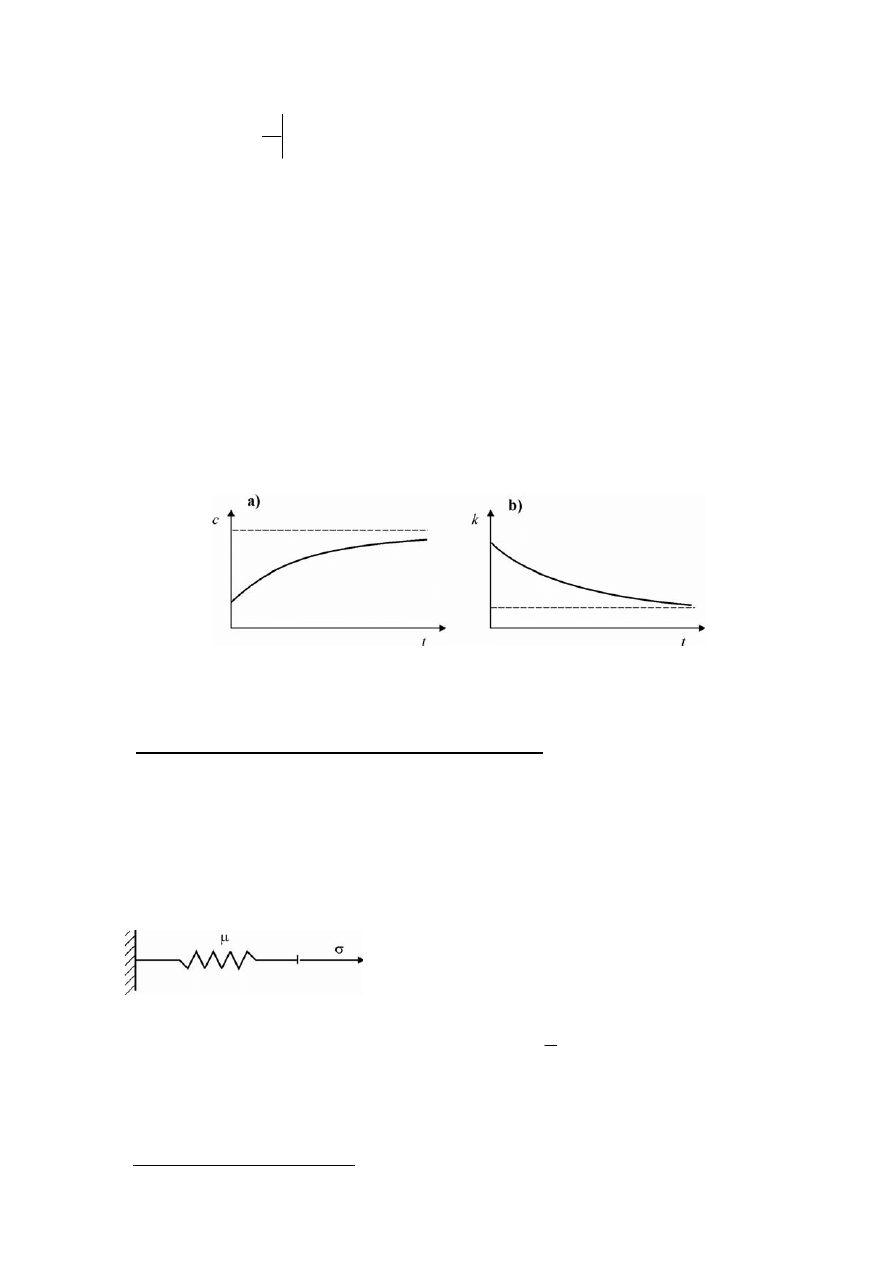
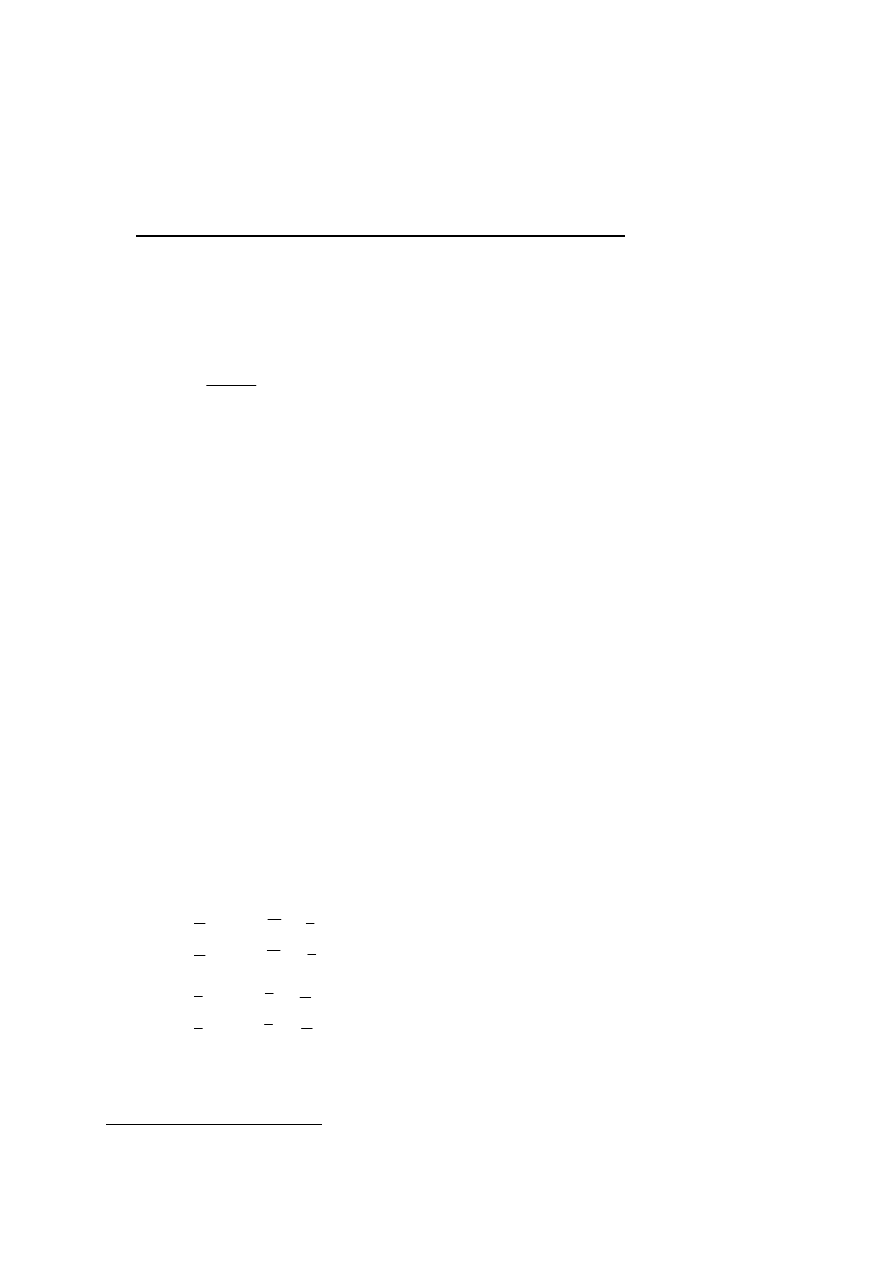
Dla materiału wykazującego cechy sprężyste i lepkie typowe funkcje pełzania i relaksacji są po-
kazane na rys. 12.2.
2. Mechaniczne modele materiału lepkosprężystego
Na wstępie rozważamy mechaniczne modele lepkosprężyste materiału, których budowę można
zilustrować graficznie. Podstawowymi elementami modeli lepkosprężystych są: model materiału
idealnie sprężystego i model materiału idealnie lepkiego
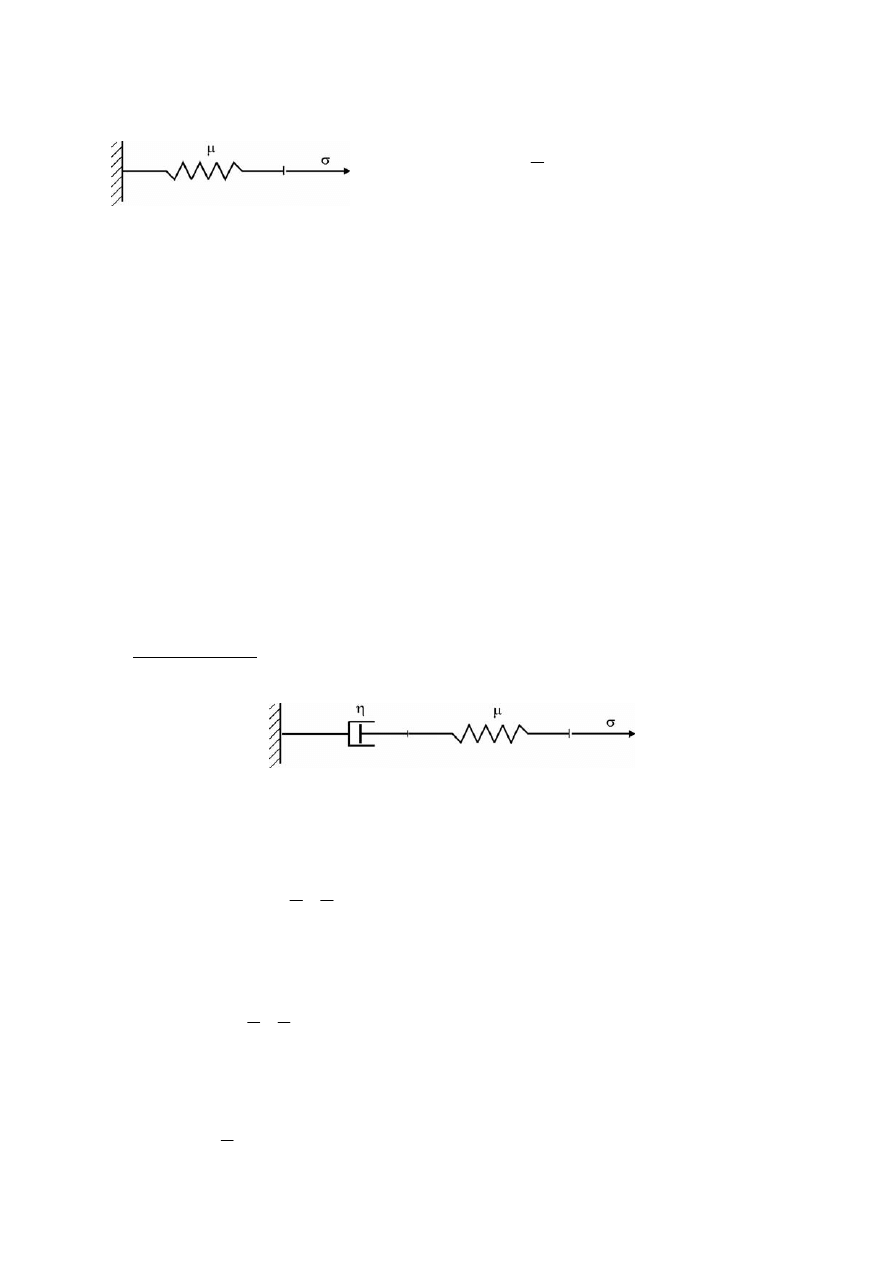
a) Model materiału idealnie sprężysty
Równanie konstytutywne:
με
=
σ
,
(12.6)
gdzie
μ - moduł sprężystosci.
Funkcja pełzania
μ
=
1
c
.
(12.7)
Funkcja relaksacji
μ
=
k
. (12.8)
b) Model materiału idealnie lepki
Rys. 12.2. Typowa funkcja pełzania (a) oraz funkcja relaksacji (b)
Rys. 12.3. Model sprężysty materiału
Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
102
Równanie konstytutywne:
η
σ
=
ε&
, (12.9)
gdzie
η − współczynnik lepkości.
Funkcja pełzania
η
= /
)
(
t
t
c
. (12.10)
Funkcja relaksacji
Odkształcenie przyjmujemy w postaci:
)
(
)
(
t
H
t
=
ε
,
po podstawieniu do (9) mamy
)
(
)
(
)
(
t
t
H
t
k
ηδ
=
η
=
ε
η
=
&
&
,
(12.11)
gdzie δ(t) - funkcja Diraca
⎪
⎩
⎪
⎨
⎧
>
ε
=
≠
=
∫
ε
ε
−
0
dla
)
0
(
d
)
(
)
(
0
dla
0
)
(
f
t
t
t
f
t
t
δ
δ
(12.12)
Wykorzystując podstawowe modele opisane wyżej możemy budować złożone modele lepko-
sprężyste, łącząc elementy podstawowe równolegle i/lub szeregowo. Poniżej pokazano niektóre
z takich modeli.
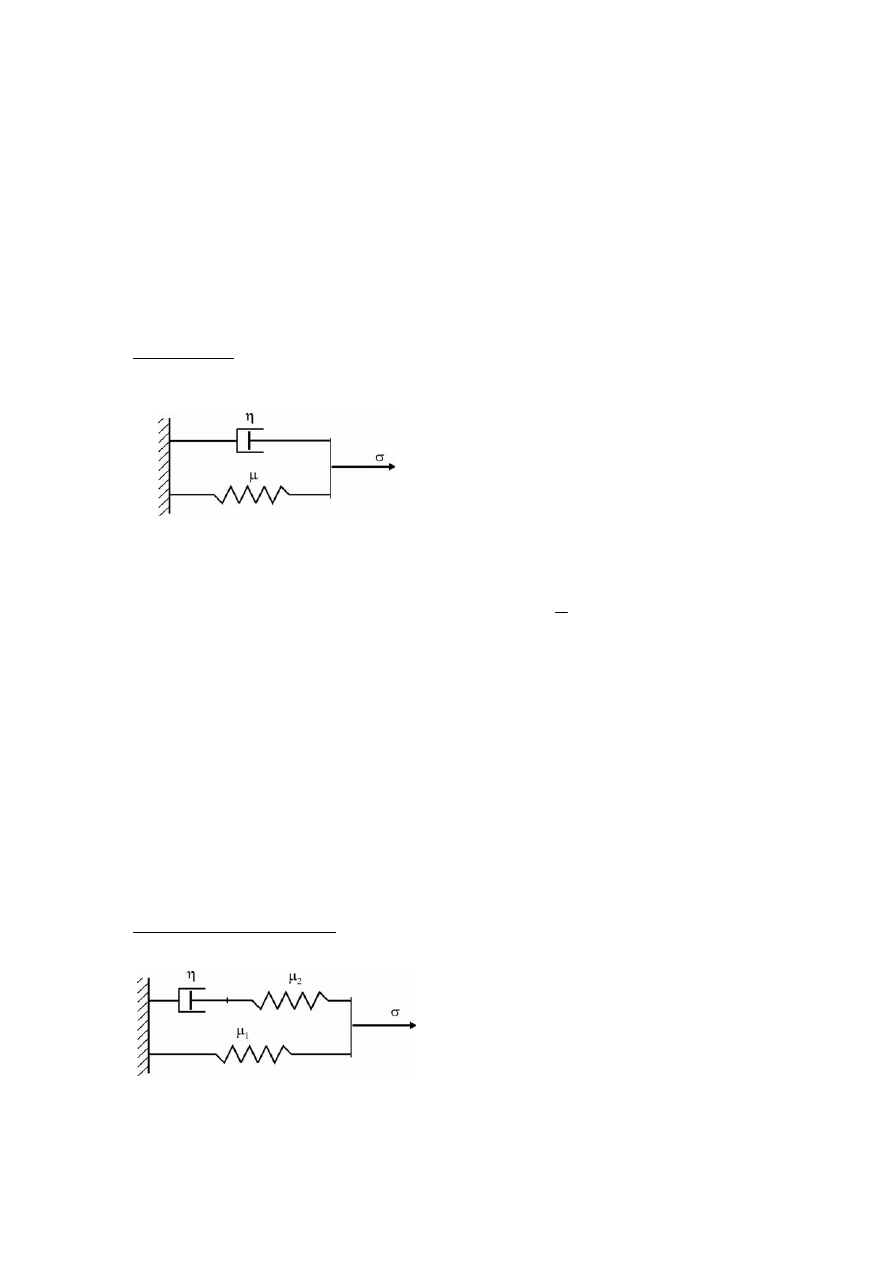
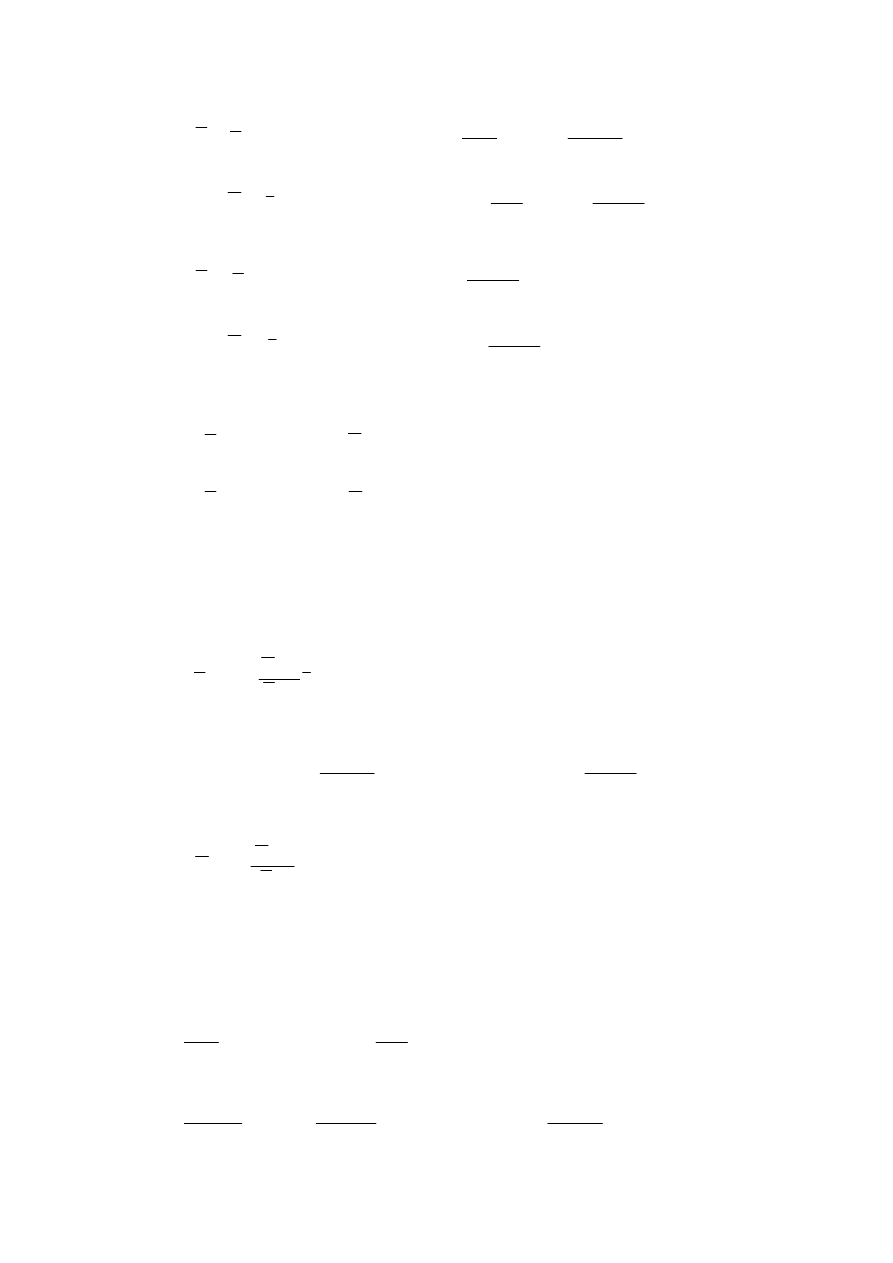
c) Model Maxwella
Równanie konstytutywne
Odkształcenie jest superpozycją odkształcenia elementu lepkiego i sprężystego, stąd
μ
σ
+
η
σ
=
ε
+
ε
=
ε
μ
η
&
&
&
&
.
(12.13)
Funkcja pełzania
Podstawiając funkcję jednostkowego naprężenia )
(
)
(
t
H
t
=
σ
do (13) i całkując po czasie
)
(
1
)
(
t
H
t
t
c
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
+
η
=
.
(12.14)
Funkcja relaksacji
Rozwiązując równanie różniczkowe
)
(t
H
k
k
μ
=
η
μ
+
&
(12.15)
Rys. 12.3. Model sprężysty materiału
Rys. 12.5. Schemat modelu Maxwella
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
103
otrzymano
)
(
)
(
)
/
(
t
H
e
t
k
t
η
μ
−
μ
=
.
(12.16)
W materiale o modelu Maxwella nagłe przyłożenie siły wywołuje natychmiastowe odkształcenie
dzięki elementowi sprężystemu. W dalszych chwilach obserwuje się pełzanie związane z istnie-
niem elementu tłumika. Również nagłe odkształcenie wywołuje natychmiastową reakcję (naprę-
żenie) elementu sprężystego, której wartość zmniejsza się wykładniczo z czasem na skutek zja-
wiska relaksacji naprężeń. Czynnik η/µ o wymiarze czasu nazywamy czasem relaksacji – jest
miarą szybkości zanikania naprężenia w elemencie sprężystym.
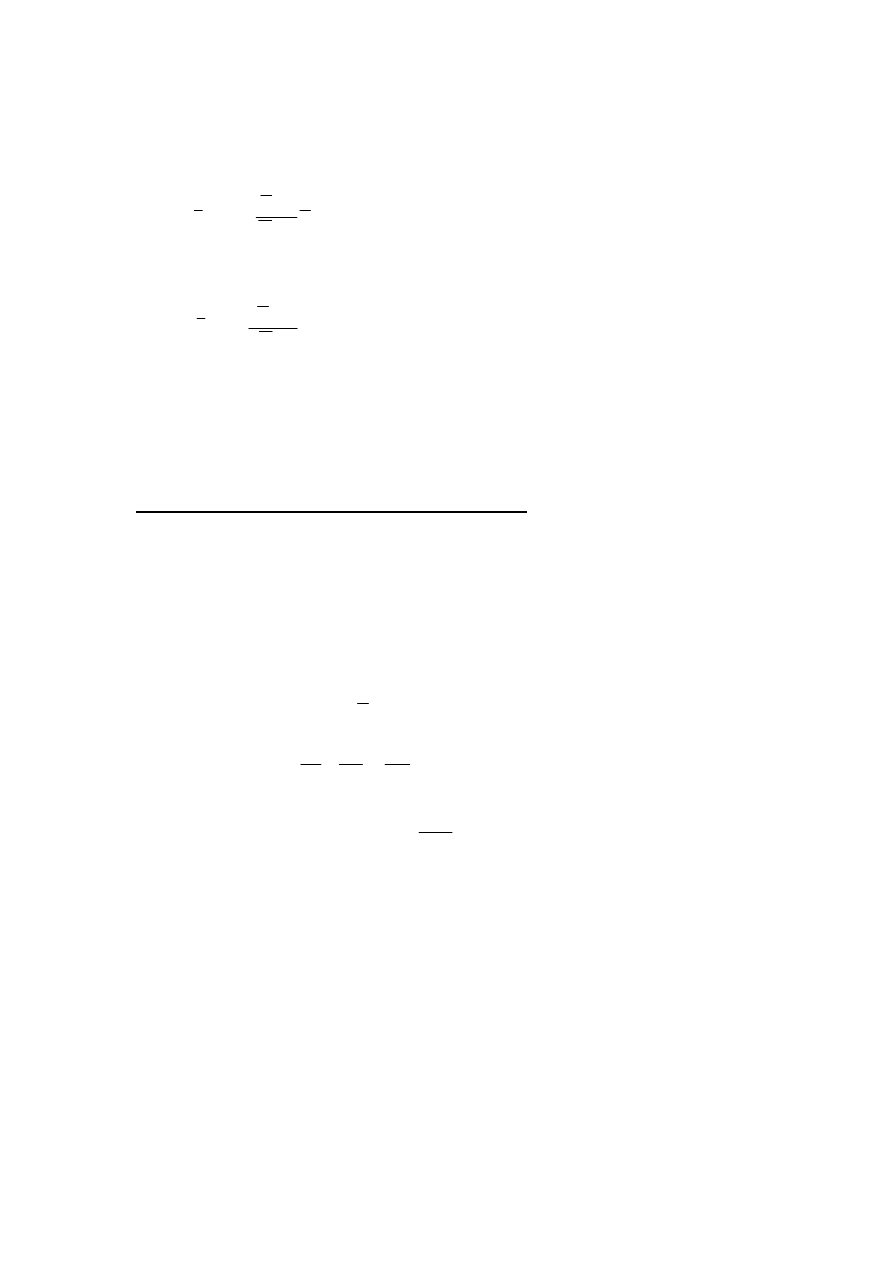
d) Model Voigta
Równanie konstytutywne
Naprężenie jest sumą naprężenia w ele-
mencie lepkiem i sprężystym, stąd
με
+
ε
η
=
σ
+
σ
=
σ
μ
η
&
. (12.17)
Funkcja pełzania
Podstawiając funkcję jednostkowego na-
prężenia
)
(
)
(
t
H
t
=
σ
do (17) i całkując po
czasie mamy
(
)
)
(
1
1
)
(
)
/
(
t
H
e
t
c
t
η
μ
−
−
μ
=
. (12.18)
Funkcja relaksacji
Podstawiając bezpośrednio do równania (...)
)
(
)
(
t
H
t
=
ε
mamy
)
(
)
(
)
(
t
H
t
t
k
μ
+
ηδ
=
.
(12.19)
W materiale o modelu Voigta nagłe przyłożenie naprężenia (siły) nie wywoła natychmiastowego
odkształcenia (wydłużenie) ponieważ element tłumiący wstawiony równolegle z elementem
sprężystym nie pozwala na natychmiastowe odkształcenie. Odkształcenie zaczyna natychmiast
narastać ale stopniowo, dopóki element sprężysty nie przejmie całego naprężenia (obciążenia).
Relaksacja tłumika ma charakter wykładniczy a η/µ jest czasem relaksacji (obrazuje szybkość
zanikania odkształcenia (przemieszczania tłoka tłumika)).
e) Model liniowy standardowy
Równanie konstytutywne
Model standardowy jest szeregowym połą-
czeniem modelu Maxwella i modelu sprę-
żystego. Naprężenie jest sumą naprężenia
w elemencie Maxwella i sprężystym, stąd
E
M
E
M
ε
=
ε
=
ε
σ
+
σ
=
σ
.
(12.20)
Z równania (13) mamy
Rys.12.6. Schemat modelu Voigta
Rys.12.7. Schemat modelu standardowego
Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
104
2
2
M
2
M
M
D
s
ημ
η
+
μ
σ
=
ε
⇒
μ
σ
+
η
σ
=
ε
M
M
&
&
, (12.21)
gdzie oznaczono operator różniczkowy
t
d
/
d
D
≡
.
Wyznaczając
σ
M
z (21) oraz podstawiając do (20
1
) mamy
ε
⎥
⎦
⎤
⎢
⎣
⎡
η
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
μ
+
+
μ
=
σ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
η
+
⇒
ε
η
+
μ
μ
+
ημ
=
σ
η
+
μ
⇒
ε
μ
+
ε
η
+
μ
ημ
=
σ
D
1
D
1
D)]
(
D
[
D)
(
D
D
2
1
1
2
2
1
2
2
1
2
2
(12.22)
a po rozpisaniu pochodnych otrzymujemy równanie konstytutywne w postaci równania róż-
niczkowego
ε
η
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
μ
+
+
ε
μ
=
σ
μ
η
+
σ
&
&
2
1
1
2
1
.
(12.23)
Funkcja pełzania
Podstawiając funkcję jednostkowego naprężenia
)
(
)
(
t
H
t
=
σ
do (23) mamy
)
(
)
(
1
2
2
1
1
t
H
t
H
c
c
&
&
μ
η
+
=
η
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
μ
+
+
μ
.
(12.24)
Korzystając z transformacji Laplace’a mamy
3
c
s
c
s
c
⇒
μ
η
+
=
η
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
μ
+
+
μ
2
2
1
1
1
1
,
(12.25)
gdzie
)]
(
[
)
(
t
c
s
c
L
=
jest transformatą Laplaca
4
funkcji pełzania. Po dokonaniu odwrotnej
transformaty mamy
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
+
μ
−
μ
+
μ
+
μ
=
η
μ
μ
+
μ
μ
−
t
e
t
c
2
2
1
1
1
1
1
1
)
(
2
1
1
2
1
. (12.26)
Funkcja relaksacji
Podobnie jak wyżej podstawiając do równania (23)
)
(
)
(
t
H
t
=
ε
oraz przyjmując )
(
)
(
t
k
t
≡
σ
mamy
)
(
1
)
(
2
1
1
2
t
H
t
H
k
k
&
&
η
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
μ
+
+
μ
=
μ
η
+
.
(12.27)
Korzystając z transformacji Laplace’a można otrzymać rozwiązanie równania (27) w postaci
(
)
)
(
1
)
(
)
(
)
/
(
1
2
1
)
/
(
2
1
2
2
t
H
e
t
H
e
t
k
t
t
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
μ
+
μ
=
μ
+
μ
=
η
μ
−
η
μ
−
. (12.28)
3
wg [10] Roylance D.: Engineering Viscoelasticity.
4
Transformata Laplace’a:
∫
∞
−
=
=
0
d
)
(
)
(
)]
(
[
t
e
t
f
s
f
t
f
st
L
.
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
105
W literaturze funkcje pełzania i relaksacji przedstawiane są również w równoważnej postaci
)
(
1
1
1
)
(
/
R
t
H
e
E
t
c
t
⎥
⎦
⎤
⎢
⎣
⎡
⋅
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
τ
τ
−
−
=
σ
τ
−
σ
ε
,
(12.29)
)
(
1
1
)
(
/
R
t
H
e
E
t
k
t
⎥
⎦
⎤
⎢
⎣
⎡
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
τ
τ
−
−
=
ε
τ
−
ε
σ
.
(12.30)
gdzie stałe
1
2
1
2
2
'
μ
μ
+
μ
μ
η
=
τ
μ
η
=
τ
σ
ε
(12.31)
są odpowiednio czasem relaksacji obciążenia przy stałym odkształceniu i czasem relaksacji od-
kształcenia przy stałym obciążeniu, natomiast gdy
t→∞ element tłumiący doznaje całkowitej
relaksacji, zatem zależność naprężenie-odkształcenie staje się podobna jak dla elementu spręży-
stego i charakteryzuje ją stała
E
R
=
μ
1
nazywana modułem sprężystym relaksacji.
Dla porównania funkcje pełzania i relaksacji dla modeli Maxwella, Voigta i modelu standardo-
wego pokazane są odpowiednio na rys. 12.8 i rys. 12.9.
Rys.12.9. Funkcje relaksacji dla modelów (a) Maxwella, (b) Voigta, (c) standardowego.
Rys.12.8. Funkcje pełzania dla modelów (a) Maxwella, (b) Voigta, (c) standardowego.
Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
106
Rys. 12.10. Złożone modele materiału lepkosprężystego
Na podobnej zasadzie jak to pokazano dla modelu standardowego można budować bardziej zło-
żone modele lepkosprężyste. Przykładowo na rys. 12.10 pokazano schematy złożonych modeli
mechanicznych materiału lepkosprężystego.
Dla modelu pokazanego na rys. 12.10a, będący uogólnieniem modelu Kelvina, mamy
,
...
oraz
...
,
D
,
2
1
2
1
2
1
1
0
n
ε
+
+
ε
+
ε
=
ε
σ
=
ε
η
+
ε
μ
σ
=
ε
μ
(12.32)
stąd
.
1
D
1
...
D
1
1
1
1
1
0
ε
=
σ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
μ
+
η
+
μ
+
+
η
+
μ
+
μ
+
n
n
n
(12.33)
Analogicznie dla modelu pokazanego na rys. 12.10b (uogólnienie modelu Maxwella) mamy
...
,
D
1
1
,
D
,
1
1
1
1
1
1
1
1
1
1
1
σ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
η
+
μ
=
ε′′
+
ε′
=
ε
⇒
σ
=
ε′′
η
σ
=
ε′
μ
(12.34)
stąd
.
D
D
D
...
D
D
...
1
1
1
1
1
0
1
1
0
ε
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
η
+
η
+
μ
η
μ
+
+
η
+
μ
η
μ
+
μ
+
=
σ
+
+
σ
+
σ
=
σ
+
+
n
n
n
n
n
n
(12.35)
Aby otrzymać jawną postać konstytutywnego równania różniczkowego z równań (33) i (35) na-
leży przedstawić je w postaci wielomianu eliminując mianowniki ułamków, a następnie iloczyny
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
107
operatora różniczkowego D i funkcji naprężenia oraz odkształcenia traktować jako pochodne po
czasie.
3. Równania konstytutywne ciała lepkosprężystego
Zależności między naprężeniem a odkształceniem sformułowane w poprzednich rozdziałach
uogólniono na kontinuum trójwymiarowe. W tym celu zastąpiono zależność naprężenie-
odkształcenie zależnością tensorową.
Przyjęto, że układem odniesienia będzie kartezjański układ współrzędnych i promień wektor
dowolnego punktu ma współrzędne
(
)
3
2
1
,x
,x
x
=
= x
r
.
Wprowadza się następujące oznaczenia: tensor naprężenia σ
ij
, tensor odkształcenia
ε
ij
w każdym
punkcie x ciała w przedziale czasu
(
)
+∞
<
<
∞
−
t
. Zakłada się że pole odkształceń
ε
ij
(x
,t), pole
przemieszczeń
u
i
(x,
t) i pole prędkości v
i
(x,
t) są nieskończenie małe.
Stąd pochodna cząstkowa względem czasu
t
ij
∂
ε
∂
jest równa pochodnej materialnej
ij
ε& z dokład-
nością do nieskończenie małych pierwszego rzędu.
Liniowy materiał lepkosprężysty dla kontinuum trójwymiarowe dla ciągłego i różniczkowalnego
pola odkształceń można zdefiniować następująco:
τ
τ
τ
∂
ε
∂
τ
−
=
σ
∫
∞
−
d
)
,
(
)
,
(
)
,
(
x
t
x
G
t
x
t
kl
ijkl
ij
(12.36)
Jest to prawo naprężenie-odkształcenie typu relaksacyjnego.
G
ijkl
jest polem tensorowym 4-tego
rzędu
− tensorową funkcją relaksacyjną. Równanie postaci (36) w literaturze nosi nazwę splotu
całkowego funkcji
G
ijkl
oraz
ε
ij
.
Jeżeli przyjąć, że dla
t<0 naprężenie
σ
ij
=0 i
ε
ij
=0 oraz
ε
ij
≠0 dla
t=0 wówczas równanie (36)
przyjmuje postać
τ
τ
τ
∂
ε
∂
τ
−
+
ε
=
σ
∫
+
d
)
,
(
)
,
(
)
0
,
(
)
,
(
)
,
(
0
x
t
x
G
x
t
x
G
t
x
t
kl
ijkl
kl
ijkl
ij
(12.37)
W przypadku występowania nieciągłości pola odkształceń w postaci „skoków” pola odkształceń,
wówczas dla każdej takiej nieciągłości pola odkształcenia o wartość
ij
ε
Δ w chwili t=ξ równanie
(37) należy dodatkowo uzupełnić o człon
)
(
)
,
(
)
,
(
ξ
−
ξ
ε
Δ
t
H
x
t
x
G
kl
ijkl
.
Podobnie definiujemy prawo naprężenie-odkształcenie typu pełzania (uzupełniając to równanie
w dodatkowe człony w przypadku nieciągłości pola naprężeń)
τ
τ
τ
∂
σ
∂
τ
−
=
ε
∫
∞
−
d
)
,
(
)
,
(
)
,
(
,
x
t
x
J
t
x
t
l
k
ijkl
ij
(12.38)
gdzie
J
ijkl
jest polem tensorowym 4-tego rzędu
− tensorową funkcją pełzania.
W dalszym ciągu dla uproszczenia zapisu wprowadza się skrócony zapis iloczynu splotowego.
Oznaczając przez
φ i ψ funkcje określone odpowiednio w przedziałach 0≤ t <∞ i -∞< t <∞ moż-
Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
108
na przedstawić następujące wyrażenie całkowe
)
0
(
)
(
)
(
d
d
)
(
)
(
0
ψ
ϕ
+
τ
τ
τ
ψ
τ
−
ϕ
=
∫
t
d
t
t
I
t
.
(12.39)
Jeśli całka istnieje dla każdego
t z przedziału (0,∞) to funkcja I(t) nazywana jest splotem φ i ψ i
w skrócie jest oznaczana jako
ψ
∗
ϕ
=
d
)
(t
I
.
(12.40)
Iloczyn splotowy ma następujące własności:
– przemienność:
ϕ
ψ
=
ψ
∗
ϕ
d
*
d
,
– łączność:
θ
ψ
∗
ϕ
=
θ
ψ
∗
ϕ
d
*
)
d
(
)
d
*
d(
, (12.41)
– rozdzielność:
θ
ϕ
+
ψ
∗
ϕ
=
θ
+
ψ
∗
ϕ
d
*
d
)
d(
.
Zatem wzory (36) oraz (38) można zapisać następująco:
ijkl
kl
kl
ijkl
ij
G
G
d
d
∗
ε
=
ε
∗
=
σ
,
(12.42)
ijkl
kl
kl
ijkl
ij
J
J
d
d
∗
σ
=
σ
∗
=
ε
.
(12.43)
Aksjomat o nieistnieniu wstecznego działania mówi, że dla czasu
−∞< t <0
G
ijkl
= 0 oraz
J
ijkl
=
0.
(12.44)
W przypadku materiału izotropowego tensor
G
ijkl
charakteryzuje się niezmienniczością wzglę-
dem obrotu układu współrzędnych. Zatem
G
ijkl
musi być tensorem izotropowym i wówczas
można go przedstawić w postaci
(
)
jk
il
jl
ik
kl
ij
ijkl
G
G
G
G
δ
δ
+
δ
δ
+
δ
δ
−
=
2
3
1
1
2
,
(12.45)
gdzie G
1
, G
2
są funkcjami skalarnymi spełniającymi warunek (44) i nazwane funkcjami relaksa-
cyjnymi dla ścinania i izotropowe ściskania. Funkcje te są odpowiednikami modułu Kirchhoffa
μ oraz modułu ściśliwości K dla ciał sprężystych izotropowych.
W takim razie dla materiału izotropowego związek konstytutywny (42) można zapisać równo-
ważnie jako prawo zmiany postaci i prawo zmiany objętości
kk
kk
kk
ij
ij
ij
G
G
G
G
ε
∗
=
∗
ε
=
σ
ε
∗
=
∗
ε
=
σ
d
d
'
d
d
'
'
2
2
1
1
(12.46)
gdzie
ij
ij
'
,
'
ε
σ
są składowymi dewiatora naprężenia i odkształcenia:
kk
ij
ij
ij
kk
ij
ij
ij
ε
δ
−
ε
=
ε
σ
δ
−
σ
=
σ
3
1
'
,
3
1
'
(12.47)
Analogicznie prawo naprężenie-odkształcenie typu pełzania dla ciała izotropowego ma postać
kk
kk
kk
ij
ij
ij
J
J
J
J
σ
∗
=
∗
σ
=
ε
σ
∗
=
∗
σ
=
ε
d
d
'
'
d
d
'
'
2
2
1
1
(12.48)
gdzie
J
1
, J
2
– funkcje pełzania dla ścinania i izotropowe ściskania.
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
109
Jeśli
G
ijkl
,
J
ijkl
lub
G
1
, G
2
,
J
1
, J
2
są funkcjami Heaviside’a (ze względu na czas) to związki kon-
stytutywne redukują się do związków konstytutywnych dla ciała liniowo sprężystego.
4. Równania konstytutywne w formie równań różniczkowych
W przypadku, kiedy funkcja relaksacyjna składa się ze skończonego widma, wówczas możliwe
jest przedstawienie równań konstytutywnych dla materiału lepkosprężystego w postaci równania
różniczkowego.
Niech D
k
oznacza się operator różniczkowania względem czasu
k
k
k
t
t
f
f
∂
∂
=
)
(
D
.
(12.49)
Definiujemy wielomianowe operatory różniczkowe postaci
,
D
Q
,
D
P
,
D
Q
,
D
P
2
2
1
1
0
0
2
2
m
0
k
1
0
1
∑
∑
∑
∑
=
=
=
=
=
=
=
=
n
k
m
k
k
k
k
k
k
k
n
k
k
k
d
c
b
a
(12.50)
gdzie
a
k
,
b
k
,
c
k
,
d
k
są funkcjami rzeczywistymi współrzędnych przestrzennych
x
1
,
x
2
,
x
3
, przy
czym współczynniki główne
a
n
1
,
b
m
1
,
c
n
2
,
d
m
2
są różne od zera, tak więc wielomiany P
1
, P
2
, Q
1
,
Q
2
są odpowiednio rzędu
n
1
,
n
2
,
m
1
,
m
2
.
Na podstawie powyższych założeń równania konstytutywne dla izotropowego liniowego mate-
riału lepkosprężystego (46) można przedstawić w równoważnej postaci
⎩
⎨
⎧
ε
=
σ
ε
=
σ
kk
kk
ij
ij
2
2
1
1
Q
P
'
Q
'
P
(12.51)
Jeśli równanie konstytutywne dla danego materiału może być wyrażone w postaci całkowej i
różniczkowej to można określić zależność między funkcją relaksacyjną (lub pełzania) a operato-
rami różniczkowymi.
1. Dokonujemy transformacji Laplace’a równań
5
(46) i (48)
),
(
)
(
)
(
),
(
'
)
(
)
(
'
2
1
s
s
G
s
s
s
s
G
s
s
kk
kk
ij
ij
ε
=
σ
ε
=
σ
(12.52)
).
(
)
(
)
(
),
(
'
)
(
)
(
'
2
1
s
s
J
s
s
s
s
J
s
s
kk
kk
ij
ij
σ
=
ε
σ
=
ε
(12.53)
2. Podobnie transformujemy równania (51)
5
Transformacja Laplace’a splotu: L[f *g] = L[f] L[g]
Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
110
,
)
0
(
'
)
0
(
'
)
0
(
'
)
(
'
)
(
)
0
(
'
)
0
(
'
)
0
(
'
)
(
'
)
(
1
1
1
1
1
2
1
1
1
1
2
1
1
1
∑
∑
=
−
−
−
−
−
−
−
−
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
ε
∂
+
+
∂
ε
∂
+
ε
−
ε
=
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
σ
∂
+
+
∂
σ
∂
+
σ
−
σ
m
k
k
ij
k
ij
k
ij
k
k
ij
k
ij
k
ij
k
ij
k
n
k
k
ij
t
t
s
s
b
s
s
Q
t
t
s
s
a
s
s
P
L
L
(12.54)
,
)
0
(
)
0
(
)
(
)
(
)
0
(
)
0
(
'
)
(
'
)
(
2
2
1
1
1
1
2
1
1
1
1
2
∑
∑
=
−
−
−
−
−
−
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
ε
∂
+
+
ε
−
ε
=
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
σ
∂
+
+
σ
−
σ
m
k
k
jj
k
jj
k
k
jj
k
ij
k
jj
k
n
k
k
jj
t
s
d
s
s
Q
t
s
c
s
s
P
L
L
(12.55)
gdzie
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
=
=
=
∑
∑
∑
∑
=
=
=
=
2
2
1
1
0
0
2
2
m
0
k
1
0
1
)
(
,
)
(
)
(
,
)
(
n
k
m
k
k
k
k
k
k
k
n
k
k
k
s
d
s
Q
s
c
s
P
s
b
s
Q
s
a
s
P
(12.56)
3. To czy równania (54) i (55) mogą być traktowane jako prawo relaksacyjne czy pełzania zale-
ży od tego czy odpowiednio
n
1
≥m
1
,
n
2
≥m
2
.
4. Jeśli
n
1
≥m
1
wtedy (54) ma postać:
)
(
'
)
(
)
(
)
(
'
1
1
s
s
P
s
Q
s
ij
ij
ε
=
σ
,
(12.57)
jeżeli spełniony jest warunek początkowy
0
)
0
(
'
)
0
(
'
)
0
(
'
)
0
(
'
1
1
1
1
1
1
1
1
1
1
≡
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
ε
∂
+
+
ε
−
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
∂
σ
∂
+
+
σ
∑
∑
=
−
−
−
−
−
−
=
m
k
k
ij
k
ij
k
k
k
ij
k
ij
k
n
k
k
t
s
b
t
s
a
L
L
. (12.58)
Wówczas równanie (57) można traktować jako prawo relaksacyjne gdzie
)
(
)
(
)
(
1
1
1
s
P
s
s
Q
s
G
=
.
(12.59)
5. Warunek początkowy (58) jest wielomianem wielkości
s. Każdy współczynnik wielomianu
musi być równy zero.
Tak więc gdy
n
1
=m
1
to
⎪
⎪
⎪
⎪
⎩
⎪⎪
⎪
⎪
⎨
⎧
ε
+
+
∂
ε
∂
=
σ
+
+
∂
σ
∂
+
∂
σ
∂
ε
+
∂
ε
∂
=
σ
+
∂
σ
∂
ε
=
σ
−
−
−
−
−
−
−
−
−
).
0
(
'
)
0
(
'
)
0
(
'
)
0
(
'
)
0
(
'
),
0
(
'
)
0
(
'
)
0
(
'
)
0
(
'
),
0
(
'
)
0
(
'
1
1
1
1
2
2
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
1
ij
n
ij
n
n
ij
n
ij
n
n
n
ij
n
n
ij
n
ij
n
ij
n
ij
n
ij
n
ij
n
b
t
b
a
t
a
t
a
b
t
b
a
t
a
b
a
K
K
L
(12.60)
Jeśli
m
1
<n
1
wtedy współczynniki w równaniach (58) ze wskaźnikami
k>m
1
muszą być zastą-
Konderla P. Mechanika ośrodków ciągłych
________________________________________________________________________________________
111
pione przez zera.
6. Jeśli
n
1
≤m
1
wtedy (54) ma postać:
)
(
'
)
(
)
(
)
(
'
1
1
s
s
Q
s
P
s
ij
ij
σ
=
ε
(12.61)
jeśli zachodzi warunek początkowy (58).
Wówczas równanie (57) można traktować jako prawo pełzania gdzie
)
(
)
(
)
(
1
1
1
s
Q
s
s
P
s
J
=
.
(12.62)
7. Jeśli
n
1
=m
1
wtedy materiał może być zdefiniowany przez prawo konstytutywne typu pełzania
lub relaksacyjnego.
5. Zagadnienie graniczne (początkowo-brzegowe)
Ruch ciała lepkosprężystego podporządkowany jest prawom zachowania masy i pędu, zależno-
ściom między naprężeniem i odkształceniem, warunkom brzegowym i początkowym.
Oznaczamy przez
u
i
,
ε
i
, σ
ij
,
X
i
odpowiednio składowe kartezjańskie przemieszczenia, odkształ-
cenia, naprężenia i sił masowych na jednostkę objętości, a przez
ρ – gęstość masy. Dla ciał lep-
kosprężystych jednorodnych izotropowych i nieskończenie małych przemieszczeń możemy za-
pisać następujące równania
definicja
odkształcenia
(
)
i
j
j
i
ij
u
u
,
,
2
1
+
=
ε
,
(12.63)
równanie
ciągłości
0
=
⎟
⎠
⎞
⎜
⎝
⎛
∂
∂
ρ
∂
∂
+
∂
ρ
∂
t
u
x
t
i
i
,
(12.64)
równanie ruchu
2
2
,
t
u
X
i
i
j
ij
∂
∂
=
+
ρ
σ
,
ji
ij
σ
σ
=
, (12.65)
równania konstytutywne w trzech możliwych sformułowaniach:
a) prawo relaksacyjne
1
'
'
dG
ij
ij
∗
ε
=
σ
2
dG
kk
kk
∗
ε
=
σ
(12.66a)
b) prawo pełzania
1
'
'
dJ
ij
ij
∗
σ
=
ε
2
dJ
kk
kk
∗
σ
=
ε
(12.66b)
c) w postaci równań różniczkowych
kk
kk
ij
ij
ε
=
σ
ε
=
σ
2
2
1
1
Q
P
'
Q
'
P
(12.66c)
warunki
początkowe dla stanu naturalnego:
0
=
σ
=
ε
=
ij
ij
ij
u
dla
-∞<t<0
(12.67)
W przypadku stosowania równań (66c) w chwili początkowej
t=0 zachodzi skok ciągłości de-

Kurs na Studiach Doktoranckich Politechniki Wrocławskiej (wersja: styczeń 2007)
________________________________________________________________________________________
112
wiatora odkształcenia bądź naprężenia, wówczas warunki początkowe muszą określać pole od-
kształcenia i pochodne tego pola w chwili początkowej
),
0
(
'
...
),
0
(
'
),
0
(
'
+
+
+
∂
ε
∂
∂
ε
∂
ε
n
ij
n
ij
ij
t
t
(12.68)
jak również pole naprężenia i jego pochodne
),
0
(
'
...
),
0
(
'
),
0
(
'
+
+
+
∂
σ
∂
∂
σ
∂
σ
n
ij
n
ij
ij
t
t
(12.69)
a ponadto powyższe wartości muszą spełniać warunki konieczne (60)
,
,...,
2
,
1
dla
)
0
(
'
)
0
(
'
n
r
t
b
t
a
r
k
ij
r
k
n
r
k
k
r
k
ij
r
k
n
r
k
k
=
∂
ε
∂
=
∂
σ
∂
+
−
−
=
+
−
−
=
∑
∑
(12.70)
gdzie
n jest liczbą większą z dwóch liczb będących stopniami wielomianu P
1
i Q
1
.
Warunki brzegowe mogą mieć postać albo zadanych sił powierzchniowych na powierzchni
S
σ
z
normalną zewnętrzną
n
i
(warunki kinetyczne)
i
j
ij
p
n
=
σ
na
S
σ
,
(12.71)
albo zadanych przemieszczeń na powierzchni
S
u
i
i
z
u
= na S
u
,
(12.72)
gdzie
p
i
, z
i
są z góry danymi funkcjami miejsca i czasu oraz
S = S
σ
+ S
u
.
Zagadnienie teorii lepkosprężystości liniowej polega na wyznaczeniu
u
i
,
e
ij
,
σ
ij
dla zadanych
X
i
,
p
i
,
z
i
oraz danych warunków początkowych. Z wyjątkiem prawa konstytutywnego (prawa naprę-
żenie-odkształcenie) identyczne równania mamy w liniowej teorii sprężystości.
Wyszukiwarka
Podobne podstrony:
1 35id 8281 Nieznany (2)
Gor±czka o nieznanej etiologii
02 VIC 10 Days Cumulative A D O Nieznany (2)
Abolicja podatkowa id 50334 Nieznany (2)
45 sekundowa prezentacja w 4 ro Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
Mechanika Plynow Lab, Sitka Pro Nieznany
katechezy MB id 233498 Nieznany
2012 styczen OPEXid 27724 Nieznany
metro sciaga id 296943 Nieznany
Mazowieckie Studia Humanistyczn Nieznany (11)
cw 16 odpowiedzi do pytan id 1 Nieznany
perf id 354744 Nieznany
DO TEL! 5= Genetyka nadci nieni Nieznany
Opracowanie FINAL miniaturka id Nieznany
3 Podstawy fizyki polprzewodnik Nieznany (2)
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
więcej podobnych podstron