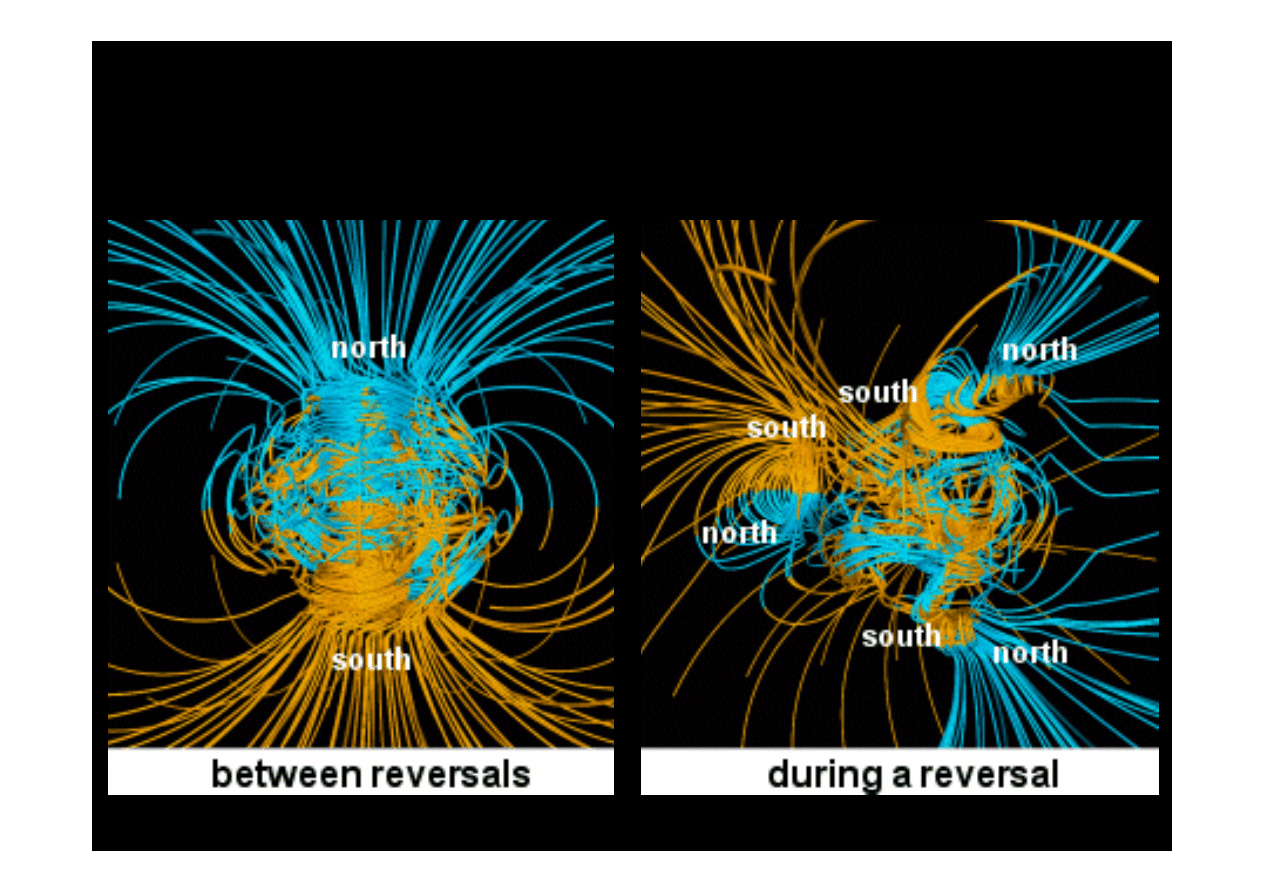
Pole magnetyczne

Obserwacja
Ładunki elektryczne
w spoczynku
⇒ oddziaływania
elektrostatyczne; pole E
Ładunki elektryczne
w ruchu
⇒ oddziaływania
elektryczne i magnetyczne; pole E i B
Źródło pola magnetycznego :
elementarne:
⇒
elementarny ładunek elektryczny
poruszający się z prędkością v
praktyczne:
⇒
prąd elektryczny
pole B ?
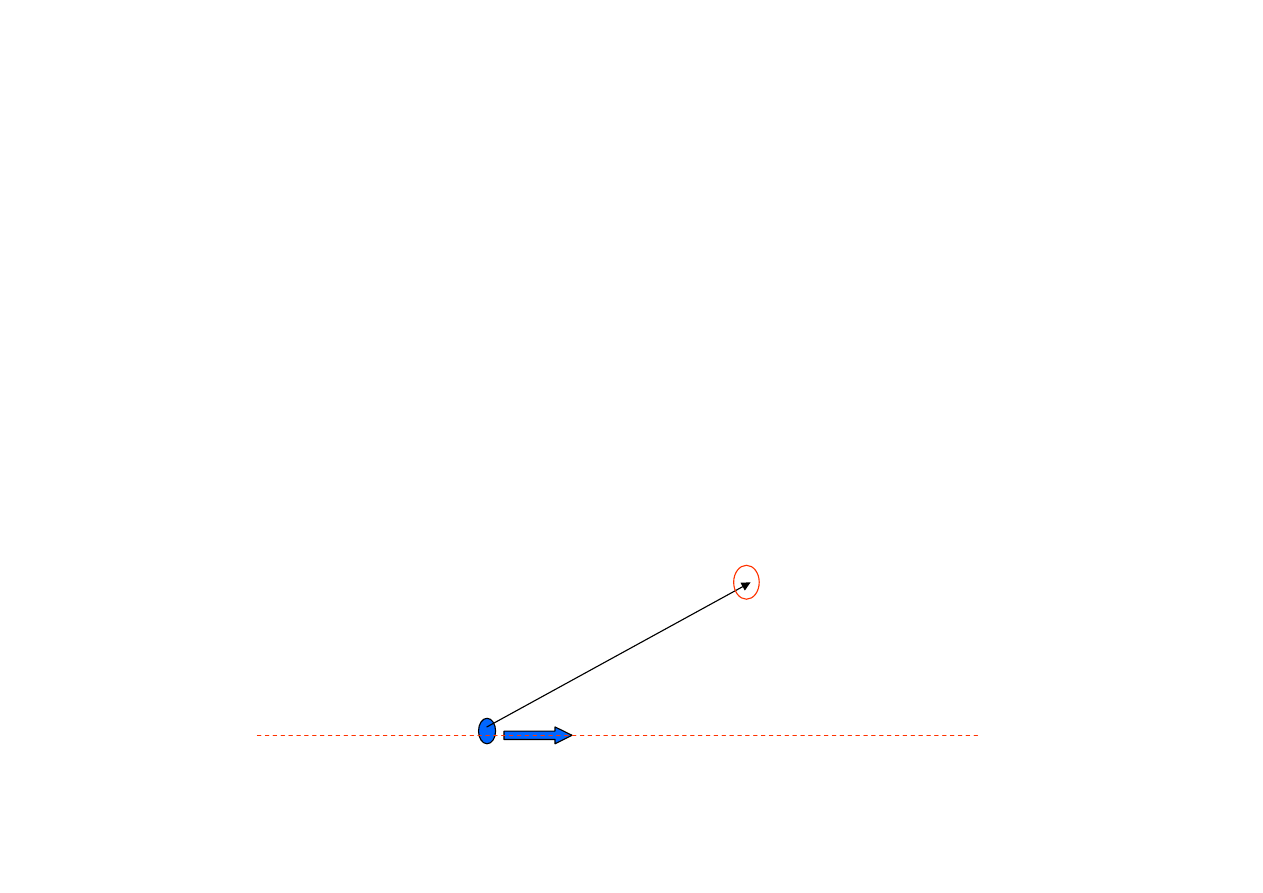
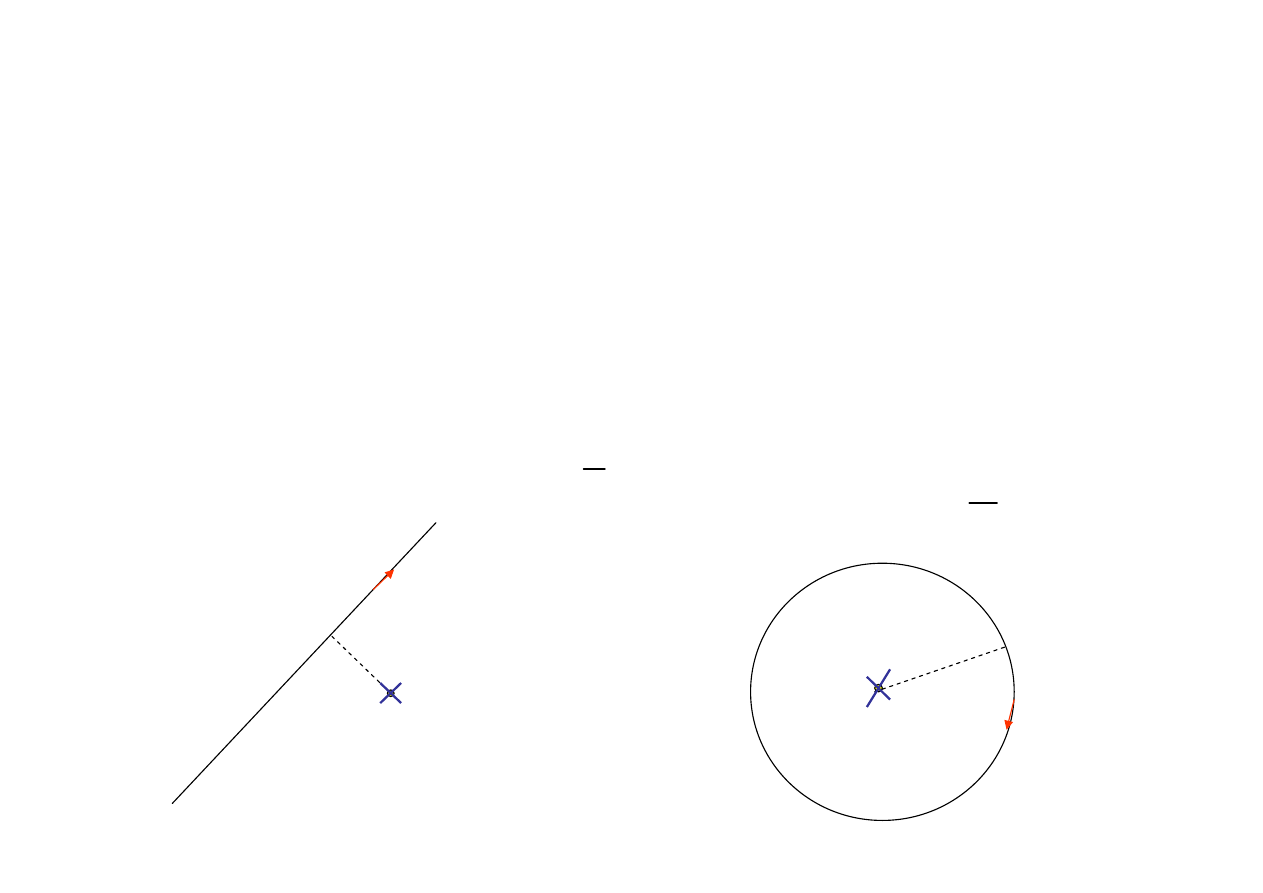
Jakie pole B wytwarza poruszający się ładunek?
Argumenty logiki i symetrii
1. „złamanie” izotropowości przestrzeni – wyróżniony kierunek,
2. B= f(q,v, r)
Wnioski: symetria osiowa pola B,
B~ q(v x r), B~ 1/r
2
v
r
q
Jakie pole B wytwarza poruszający się ładunek?
Wyniki doświadczenia (v
<<c)
(ładunek q poruszający się z prędkością v)
,
(
μ
o
= 4
π 10
-7
H/m)
3
)
(
4
r
r
x
v
q
B
o
r
r
r
π
μ
=
Uwaga1
Wielkość B jest pseudowektorem
Uwaga 2
Wektor B podlega superpozycji: B
w
=
Σ
B
i
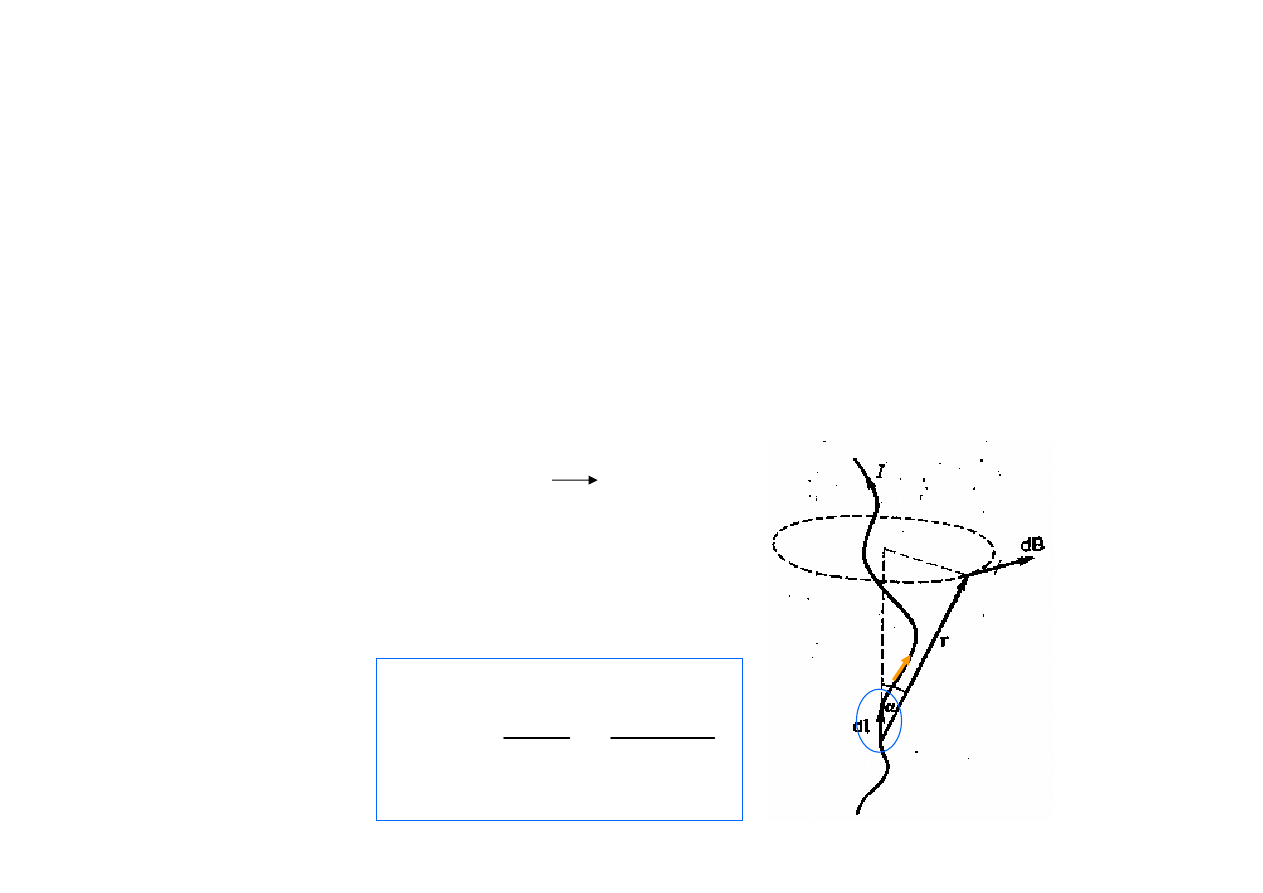
Pole B wytwarzane przez prąd I:
Prawo Biota-Savarta-Laplace’a
(q·v)
(I ·dl)
Dla prądu o natężeniu I:
dB
=
3
4
r
r
x
l
d
I
o
r
r
π
μ
Uwaga
Pole magnetyczne może również być reprezentowane przez linie
pola, równoległe do B
Przykłady źródeł pola magnetycznego
- prąd prosty B=
2(
μ
o
/4
π)
b
I
R
I
B
B
I
b
- prąd kołowy (w środku)
B=
2
π(μ
o
/4
π)
I
R
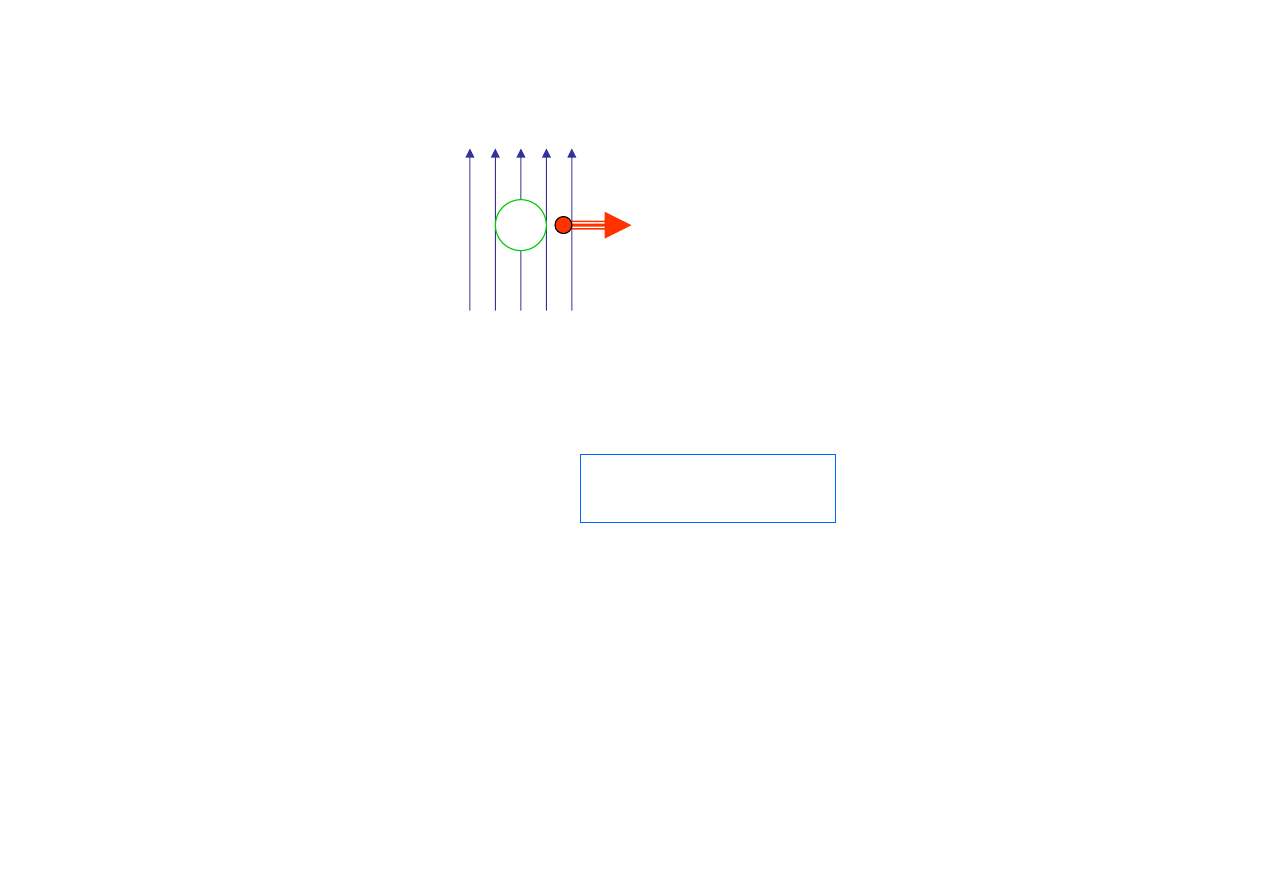
Siła oddziaływania pola B na poruszający się ładunek q:
obserwacja:
Ładunki elektryczne w ruchu generują pole B
pole B oddziałuje tylko na ładunki elektryczne w ruchu
F
B
= ?
Siła oddziaływania pola B na poruszający się ładunek q
:
Wyniki doświadczenia
(v
<<c)
Siła Lorentza: F
q,B
=q v x B
Uwaga
Siła magnetyczna F
q,B
nie wykonuje pracy nad ładunkiem,
ponieważ
F
q,B
⊥ v
(o ile się pojawia)
v
B
F
•
Gdy prędkość ładunku
v
⊥
jest prostopadła
do pola magnetycznego B, to
F
q,B
= q
v
⊥
x B = q
v
⊥
B
= max
Definicja
Indukcją magnetyczną B nazywamy pseudowektor
B = F
q,B
/q v
⊥
W przypadku, gdy naładowana cząstka porusza się
z prędkością
v
w polach
B
i
E
, doznaje działania siły
F = qE + q v x B
Uwaga :
F
q,B
/
F
e
= (v
2
/c
3
)
v
F
qB
F
e
B
-q
-q
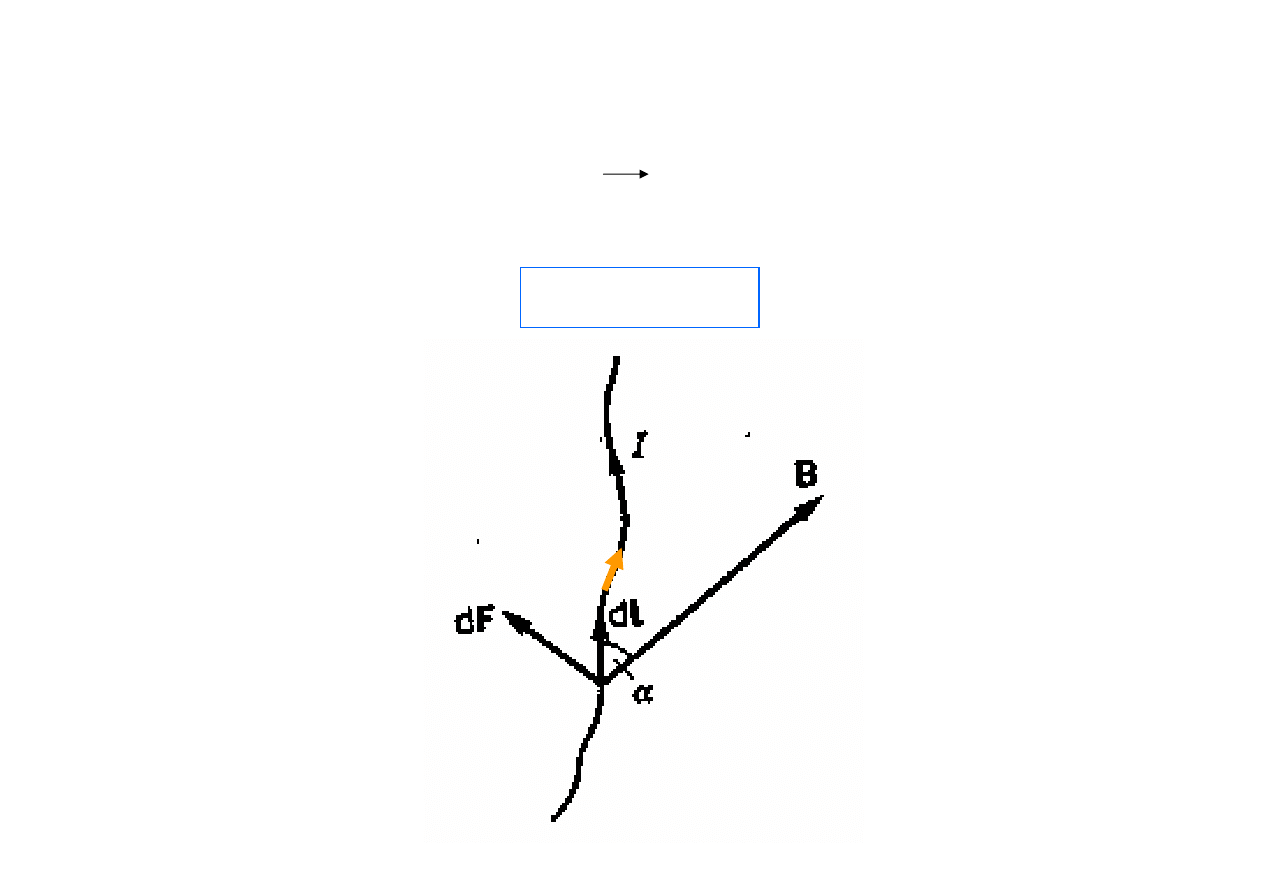
Siła oddziaływania pola B na prąd o natężeniu I
(q
·
v I
·
dl):
Prawo Ampere’a:
dF = I dl x B
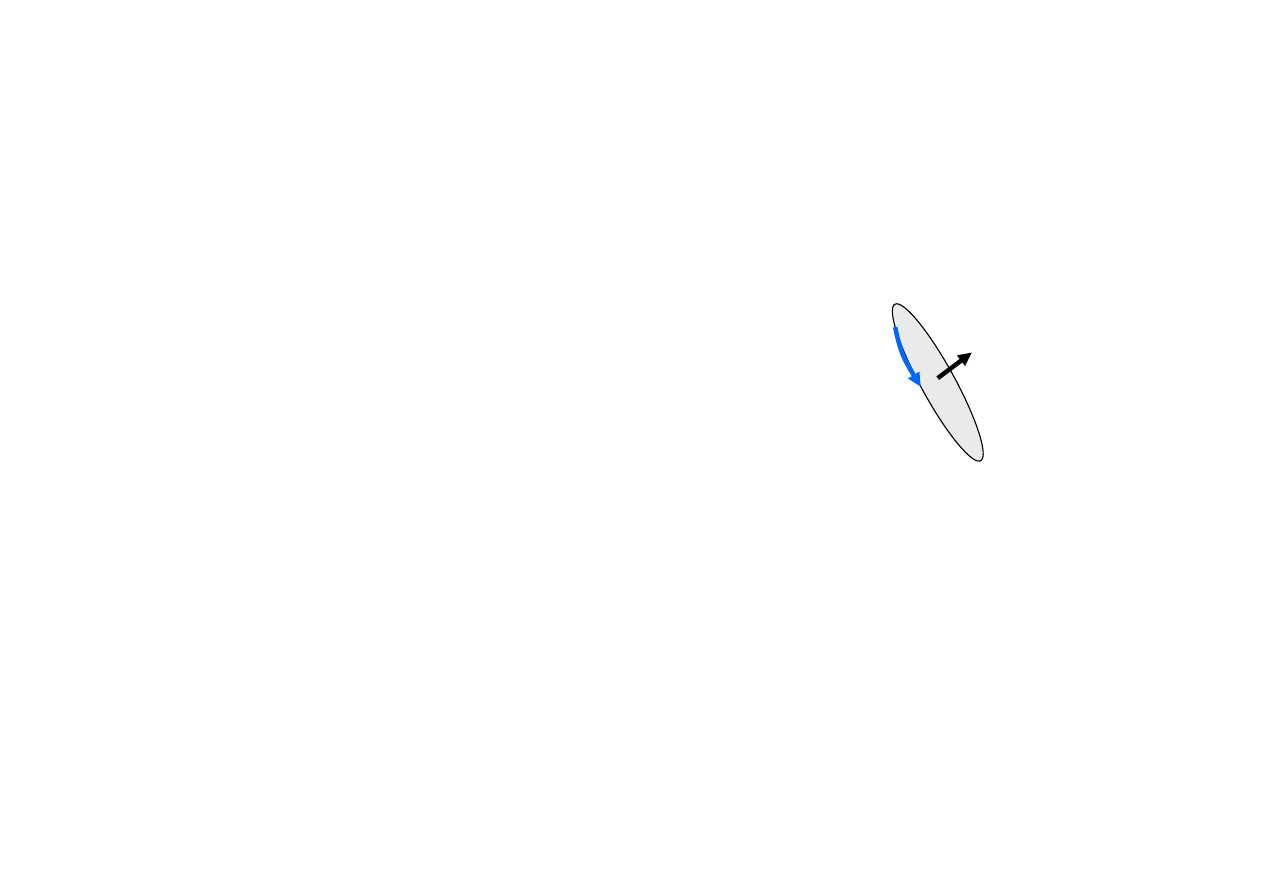
Definicja
Momentem magnetycznym p
m
płaskiego obwodu zamkniętego z prądem
I
nazywa się wielkość wektorową
p
m
= I dS
,
(dS = n
+
dS)
n
+
I
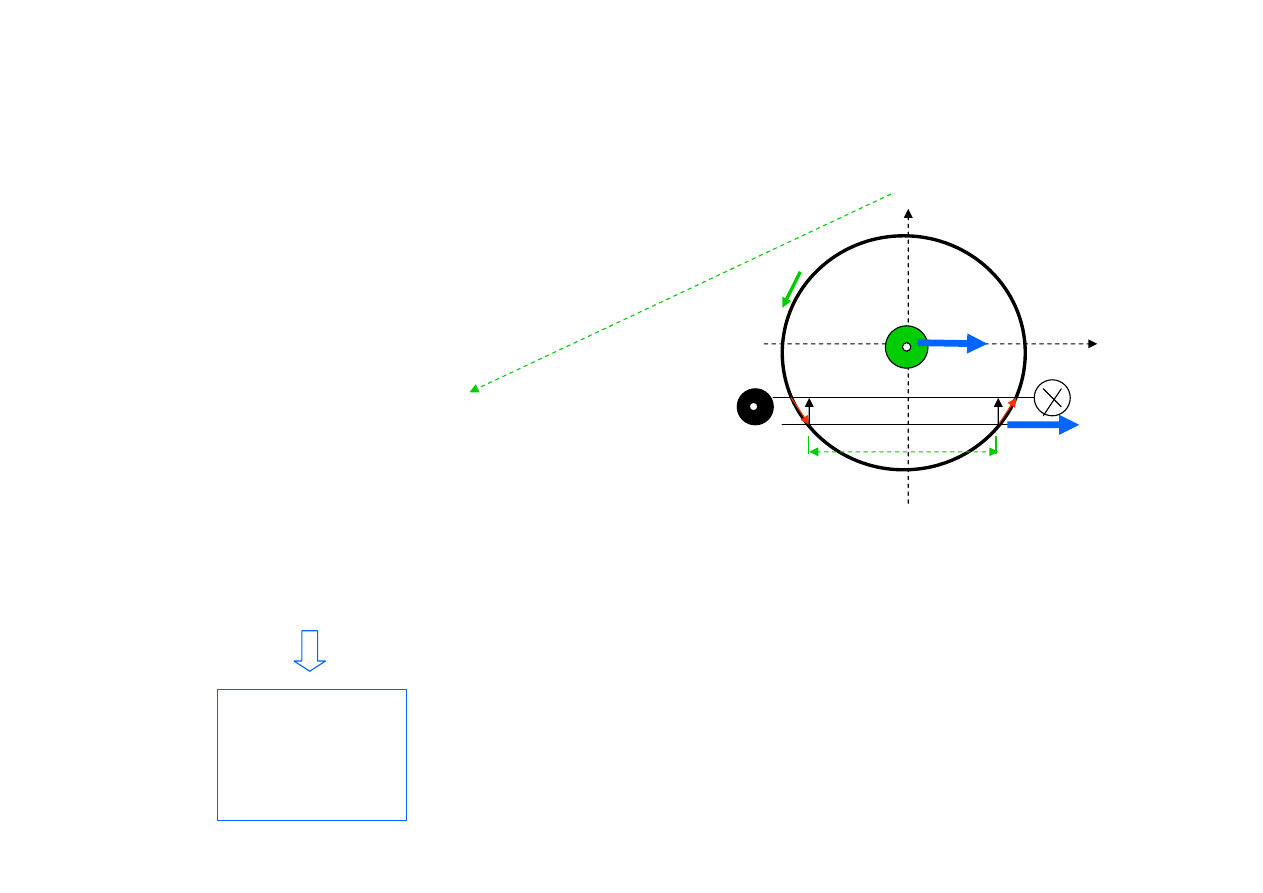
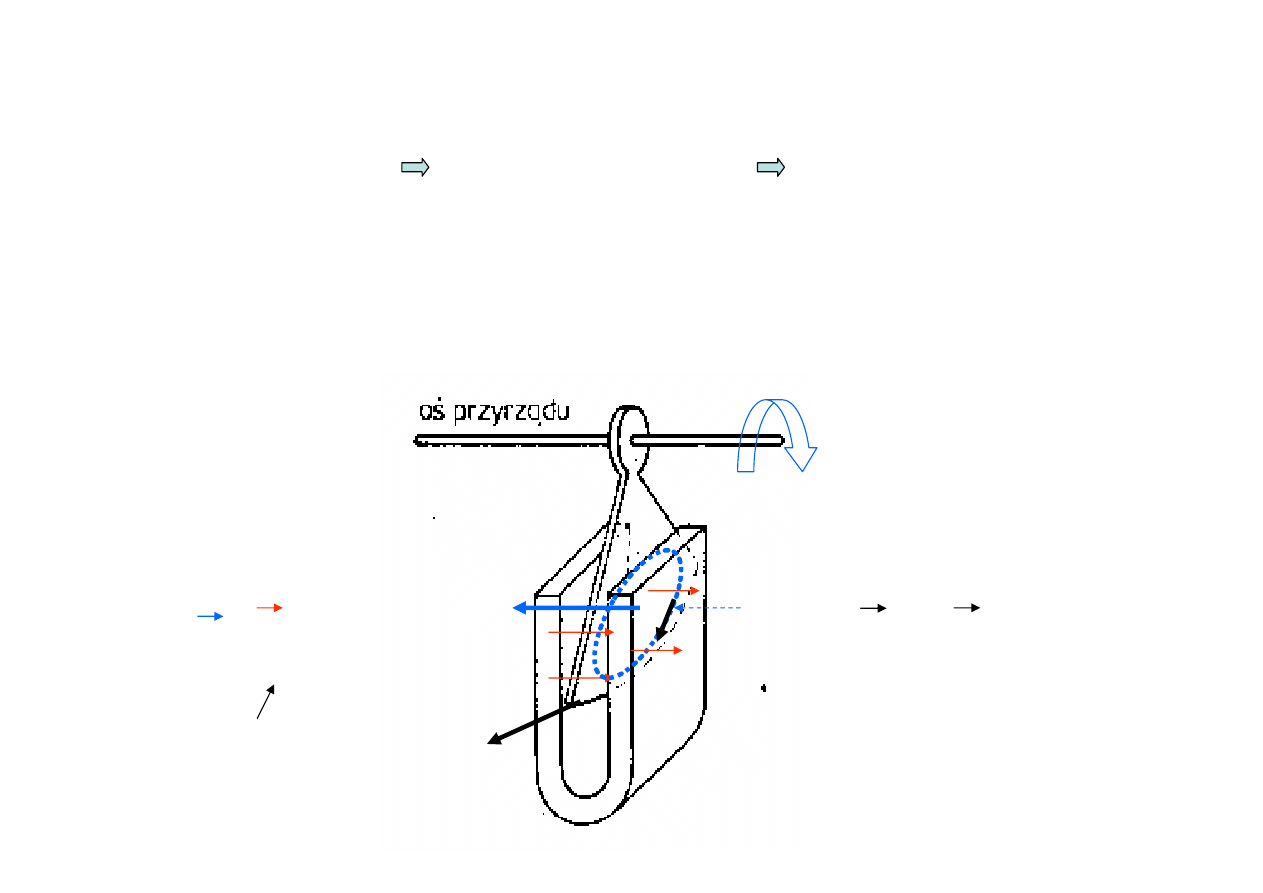
Obwód z prądem w polu magnetycznym
dF = I dlxB, dF = IB dl sin
α = IB
dl cos
β
= (IB
dy)
Moment pary sił dF:
dN = r
FF
x dF,
dN = 2
x
dF = I(2
x
dy
)B
dN = I dSxB
ogólnie N = I S x B ;
p
m
= IS moment magnetyczny
więc N = p
m
xB {analogia do dipola elektrycznego N=
μ
e
xE}
oraz W
m
=-p
m
•B
”
W
e
=-
μ
e
•E
∫
∫
∫
=
=
=
=
B
x
S
I
xB
S
d
I
B
x
S
Id
N
d
N
r
r
r
r
r
r
r
dF =
I
dl
x
B
y
x
I
dl
dF
dF
B
x
n
dy
Prawo Gaussa dla pola B
(twierdzenie o strumieniu wektora B)
Strumień wektora indukcji magnetycznej przez dowolną
powierzchnię zamkniętą jest równy zeru:
φ
B
=
= 0
korzystając z Tw. O-G uzyskuje się
div B (=
∇B) = 0
∫∫
S
S
d
B
r
r
Twierdzenie o cyrkulacji wektora B :
Cyrkulacja wektora indukcji magnetycznej po dowolnym
konturze zamkniętym jest równa - z dokładnością do stałej-
prądowi obejmowanemu przez ten kontur:
korzystając z Tw. S.
uzyskuje się:
rot B (=
∇
xB) =
μ
o
j
∫
Γ
=
I
l
d
B
o
μ
r
r
•
Γ
I

Wniosek
Pole magnetyczne B jest polem wirowym bezźródłowym
Pole magnetyczne B nie jest polem zachowawczym
Uwaga 6
Ze względu na w/w Wniosek
nie istnieje funkcja potencjału* pola magnetycznego
Pole magnetyczne w materii
Namagnesowanie
Założenie Ampere’a:
molekularne prądy kołowe I
cz
o gęstości j
cz
;
pod wpływem
zewnętrznego pola B
o
proces:
chaos
⇒ orientacja,
od prądów I
cz
powstaje pole
B’
(wewnętrzne)
Zatem całkowite pole wewnątrz materii: B =B
o
+ B’
rot B =
μ
o
( j+ j
cz
)
n
+
I
n
+
n
+
I
n
+
n
+
I
n
+
n
+
p
m
= I dS ,
(dS = n
+
dS)
Definicja
Namagnesowanie
J
jest sumą momentów magnetycznych jednostki objętości materiału
J = (1/V)
Σ
V
p
m
n
+
I

Definicja
Natężeniem pola magnetycznego H
nazywamy wielkość:
H
= (B
o
/
μ
o
) – J
Założenie:
J =
χ H,
χ
- podatność magnetyczna,
stąd
H = B/
μ
o
–
χ H,
lub
H (1 +
χ) = B/μ
o
B =
μ
o
(
1 +
χ
) H
Definicja 6
Bezwymiarową wielkość
μ
= (
1 +
χ
) nazywa się względną
przenikalnością magnetyczną (przenikalnością magnetyczną) substancji;
wobec tego:
B =
μ
μ
o
H
Uwaga 7
Podatność magnetyczna
χ
może być liczbą dodatnią lub ujemną,
wobec tego przenikalność magnetyczna
μ
może być większa lub mniejsza od jedności
W próżni brak dipoli
→ J = χ H =0
χ = 0
μ = (1 + χ) =1
B =
μ μ
o
H
→
B
o
=
μ
o
H
W magnetyku
→ B = μ μ
o
H ;
μ<1, μ>1
Twierdzenie o cyrkulacji wektora natężenia pola
magnetycznego H
Cyrkulacja
wektora
natężenia pola magnetycznego H
po dowolnym konturze zamkniętym jest równa
algebraicznej sumie prądów (makroskopowych)
obejmowanych przez ten kontur :
H dl = I
(ponieważ cyrkulacja wektora indukcji magnetycznej B
po dowolnym konturze zamkniętym jest równa :
B dl =
μ μ
o
I oraz H = B /
μ μ
o
)
lub (tw.S.): rot H = j
tylko prądy makroskopowe!
∫
L
I
L
∫
L
Twierdzenie o strumieniu
wektora natężenia pola magnetycznego H
Strumień wektora natężenia pola magnetycznego
przez dowolną powierzchnię zamkniętą jest równy zeru:
φ
H
=
= 0
korzystając z tw. O-G uzyskuje się
div H (=
∇H) = 0
∫∫
S
S
d
H
r
r
Rodzaje magnetyków
1. diamagnetyki
⇒ χ< 0, χ ≈ 10
-10
m
3
/mol, (
μ ≤ ≈ 1),
np. woda
μ
=0,999991
2. paramagnetyki
⇒ χ> 0, χ ≈ 10
-10
m
3
/mol, (
μ ≥ ≈ 1),
np. glin m=1,000008
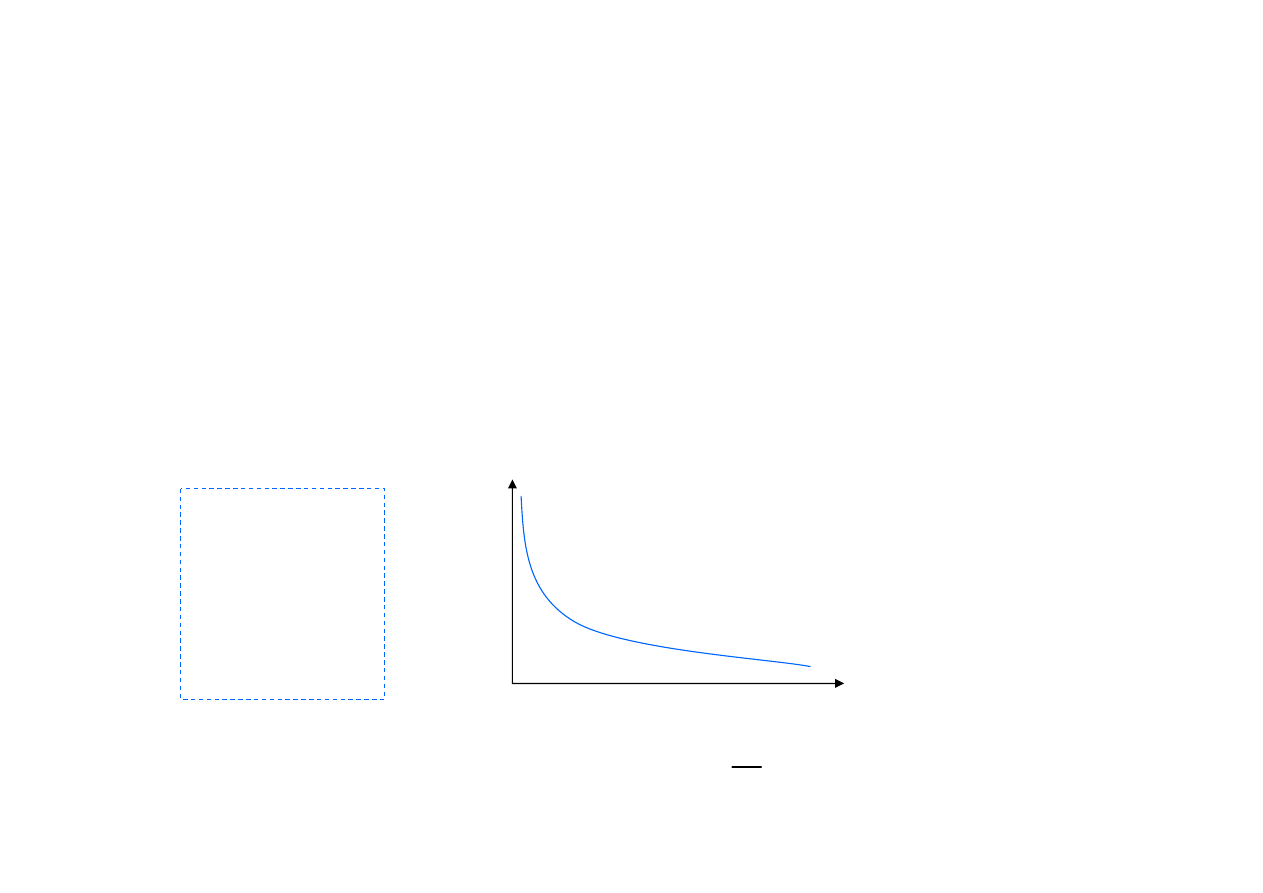
Prawo Curie:
(C – stała Curie)
χ
T
w ośrodku
B =
μ
μ
o
H
w próżni
B =
μ
o
H
T
C
=
χ
χ=
μ
-1
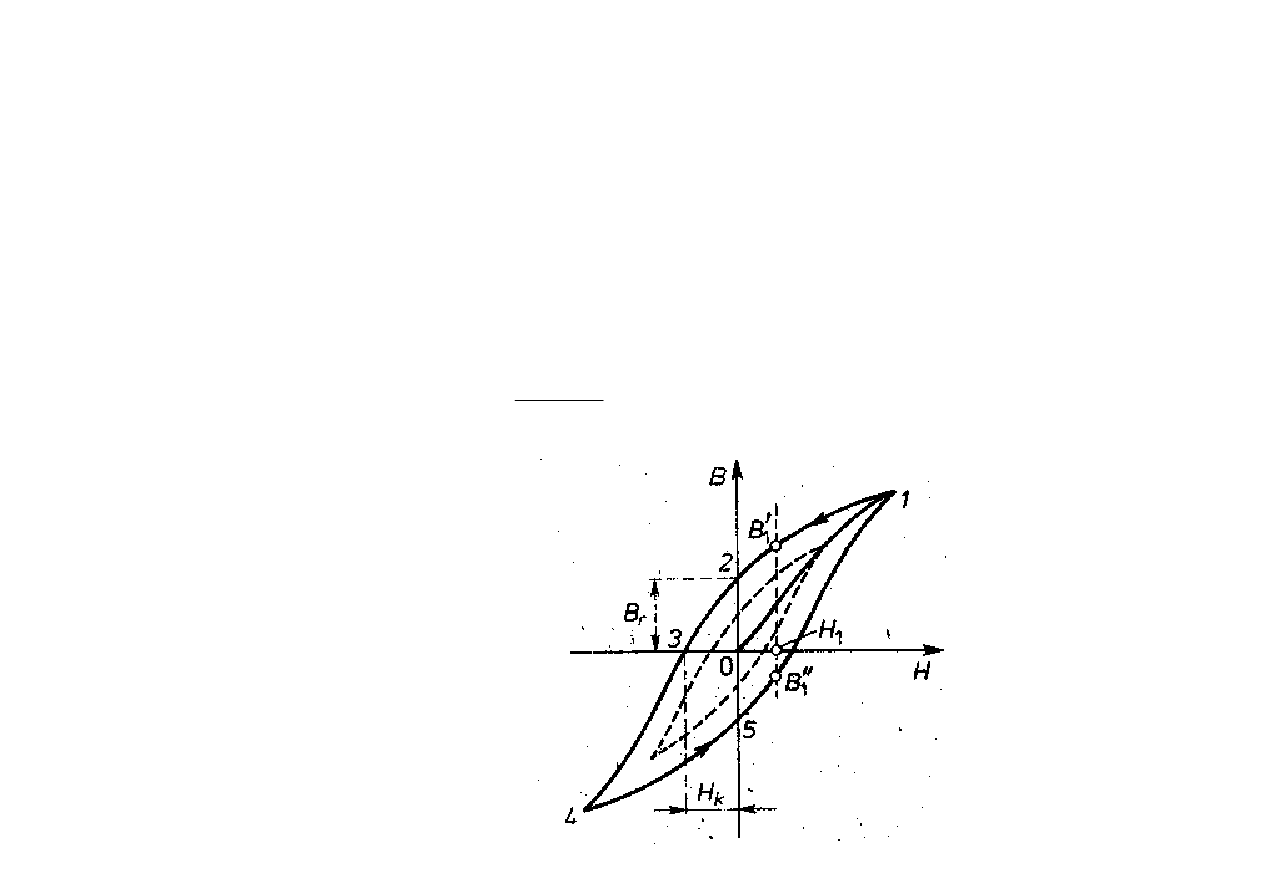
3. Ferromagnetyki
⇒ χ ≈ 1 m
3
/mol,
¾
wysoka przenikalność
μ (kilka tysięcy),
¾
μ(H), t.zn. J(H), B(H), jest funkcją nieliniową,
¾
histereza J(H), B(H).
np. stal
μ
=300 (zależy od natężenia pola)
Prawo Curie-Weissa
,
(T
c
- temperatura Curie)
4. antyferromagnetyki
ferromagnetyk
c
T
T
C
−
=
χ
Indukcja elektromagnetyczna
Michael Faraday (1831)
SEM
ind
(=
ΔV
ind
) = -
[volt],
Uwaga
SEM
ind
nie jest pochodzenia elektrostatycznego i nie tworzy
pola potencjalnego:
dt
d
B
Φ
]
/
[
2
m
Wb
S
d
B
S
B
∫∫
=
Φ
L
r
r
l
d
E
r
r
∫
=
Δ
L
ind
ind
V
0
l
d
E
≠
∫
r
r
L
ind
=
Δ
=
Φ
−
ind
B
V
dt
d
Φ
B
L
S
l
d
E
r
r
∫
L
ind
∫∫
−
=
S
S
d
B
dt
d
r
r
t
B
∂
∂
−
=
r
r
ind
E
rot
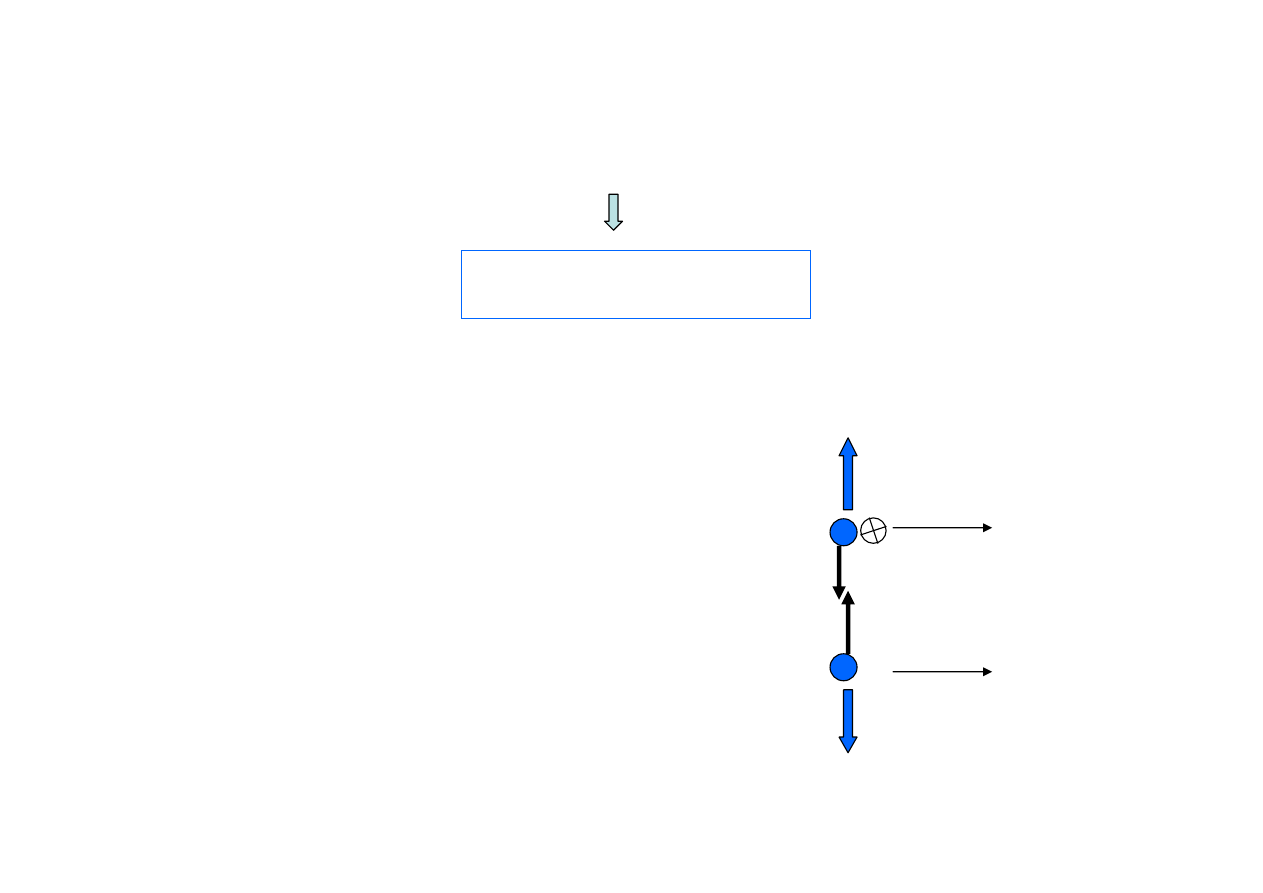
Reguła Lenza
SEM
ind
(=
ΔV
ind
)
(ośrodek przew.
σ
)
prąd indukcyjny
I
ind
Prąd indukcyjny jest zawsze skierowany tak, aby przeciwdziałać
przyczynie, która go wywołuje
(-)
⇒
prądy Foucaulta
B,
Φ
B
SEM
ind
dt
d
SEM
B
ind
Φ
−
=
p
m
W
m
=-p
m
•B
p
m
I
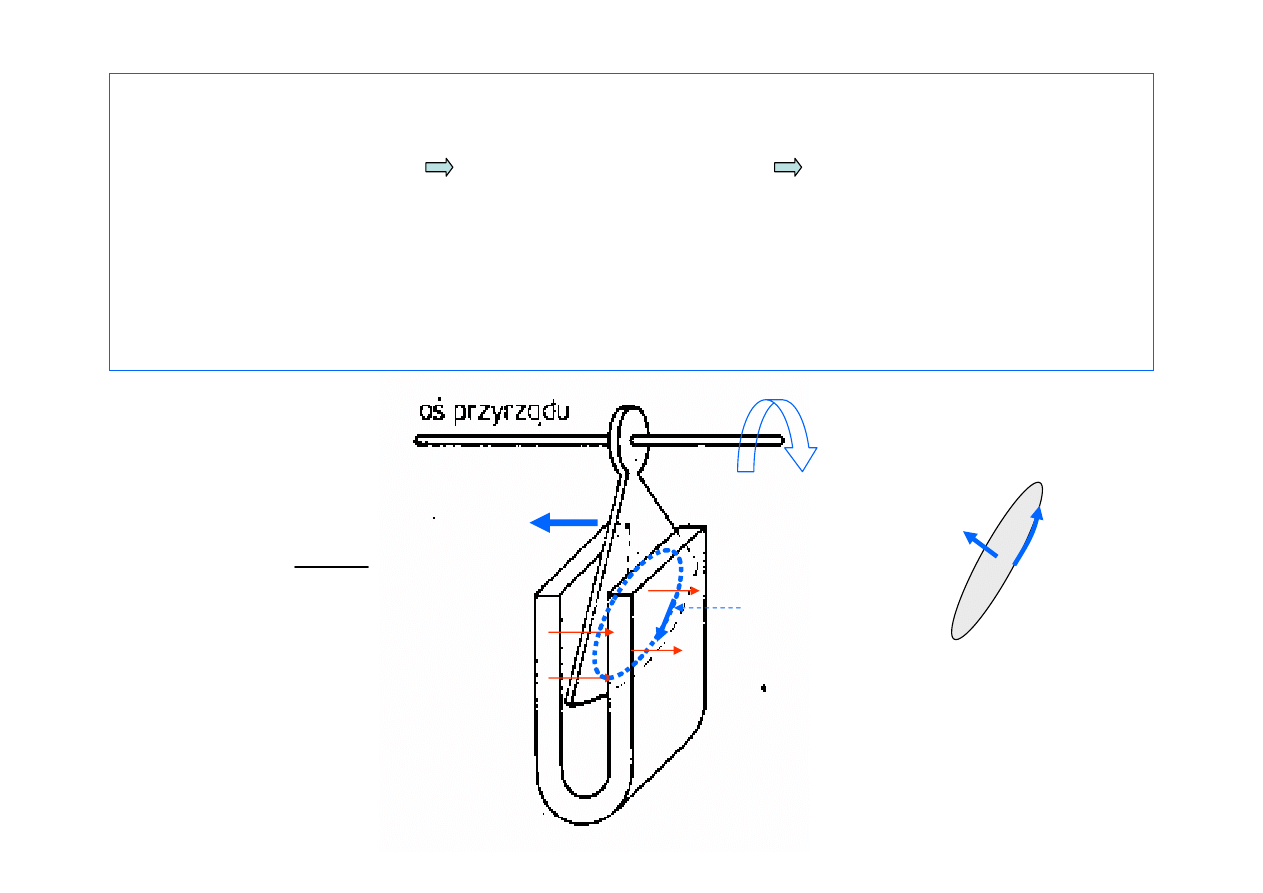
Reguła Lenza
SEM
ind
(=V
ind
)
(ośrodek przew.
σ
)
prąd indukcyjny
I
ind
Prąd indukcyjny jest zawsze skierowany tak, aby przeciwdziałać
przyczynie, która go wywołuje (-)
⇒
prądy Foucaulta
B,
Φ
B
SEM
ind
I
ind
-B
-B, p
m
W
m
=-
p
m
•
B
=
+
p
m
•
B ,
F = -
∇W
F
Zjawisko samoindukcji
dI
⇒ dB ⇒ dφ
B
⇒ SEM
ind
⇒ - dI
ind
w tym samym obwodzie
ponieważ (dla nie-ferromagnetyków):
B
∼ I
⇒
φ = L• I
, L [H-henr]– indukcyjność
obwodu
L=const(I),
zależy od kształtu prądu, tj. obwodu,
⇒
SEM
samoind
= - L
Uwaga
Indukcyjność L zależy od geometrii obwodu (kształtu i rozmiarów);
dt
dI
Document Outline
- Pole magnetyczne
- Obwód z prądem w polu magnetycznym
- Pole magnetyczne w materii
- Indukcja elektromagnetyczna
- Reguła Lenza SEMind (=Vind) (ośrodek przew. ) prąd indukcyjny Iind
- Reguła Lenza SEMind (=Vind) (ośrodek przew. ) prąd indukcyjny Iind
- Zjawisko samoindukcji
Wyszukiwarka
Podobne podstrony:
MAGNETOTERAPIA I MAGNETOSTYMULACJA 2010
2010 w15 Magnetyzm cz I
2010 w16B Magnetyzm materii
UAM-wyniki pomiarów podatności magnetycznej, Geologia GZMiW UAM 2010-2013, II rok, Geofizyka, CD-1
Rozmowy z TU 154 na startowym punkcie dowodzenia lotniska Smoleńsk Północny od 8 40 do 10 43 10 04 2
spis lab I sem 2010
2010 ZMP studenci
W4 2010
Metoda magnetyczna MT 14
wyklad 14 15 2010
MAGNETOTERAPIA PREZENTACJA
W 8 Hormony 2010 2011
RI 12 2010 wspolczesne koncepcje
2009 2010 Autorytet
wyklad 2 2010
Wykład 3 powtórzenie 2010 studenci (1)
więcej podobnych podstron