Energia sprzężonych zwojnic
(
)
(
)
(
)
1
2
1
2
1
2
1
2
,
,
1
2
2
1
1 1
2 2
1
1
2
1
0
0
,
,
1 1
1
1
2
2
1
2 2
2
1 1
1
1 2
2 2
2
0
0
2
2
1 1
1 2
2 2
(
)
1
1
2
2
I I
I I
I I
I I
di
di
di
di
W
u i
u i dt
L
M
i
L
M
i dt
dt
dt
dt
dt
L i di
Mi di
Mi di
L i di
L i di
Md i i
L i di
L I
MI I
L I
⎡
⎤ ⎡
⎤
⎛
⎞
⎛
⎞
=
+
=
+
+
+
=
⎜
⎟
⎜
⎟
⎢
⎥ ⎢
⎥
⎝
⎠
⎝
⎠
⎣
⎦ ⎣
⎦
=
+
+
+
=
+
+
=
=
±
+
∫
∫
∫
∫
można również napisać
(
) (
)
2
1 1
2
2
1
2
1 2
1
2
W
L I
L I
L L
M I I
=
±
−
m
energia jest zawsze
0
W
≥
stąd w szczególności gdy
1
2
2
1
I
L
I
L
= +
wynika stąd nierówność
1
2
M
L L
≤
1
2
M
k
L L
=
-- współczynnik sprzężenia zwojnic
Energia sprzężonych zwojnic
Gdy k=1 sprzężenie idealne ( ścisłe ).
Sprzężenie idealne nie jest możliwe, gdyż wówczas otrzymuje się W=0, a w
rzeczywistości zawsze istnieje pole, więc W>0.
Wzór na energię można również zapisać w postaci:
(
)
(
)
(
)
1 1
2
1
2 2
1
2
1 1
2 2
1
1
1
2
2
2
W
L I
MI
I
L I
MI I
I
I
=
±
+
±
=
Ψ + Ψ
lub
(
)
2
1 1
2 2
1 1
2 2
1 2
1
1
1
2
2
2
S
S
M
W
L I
L I
n I
n I
n n
=
+
+
±
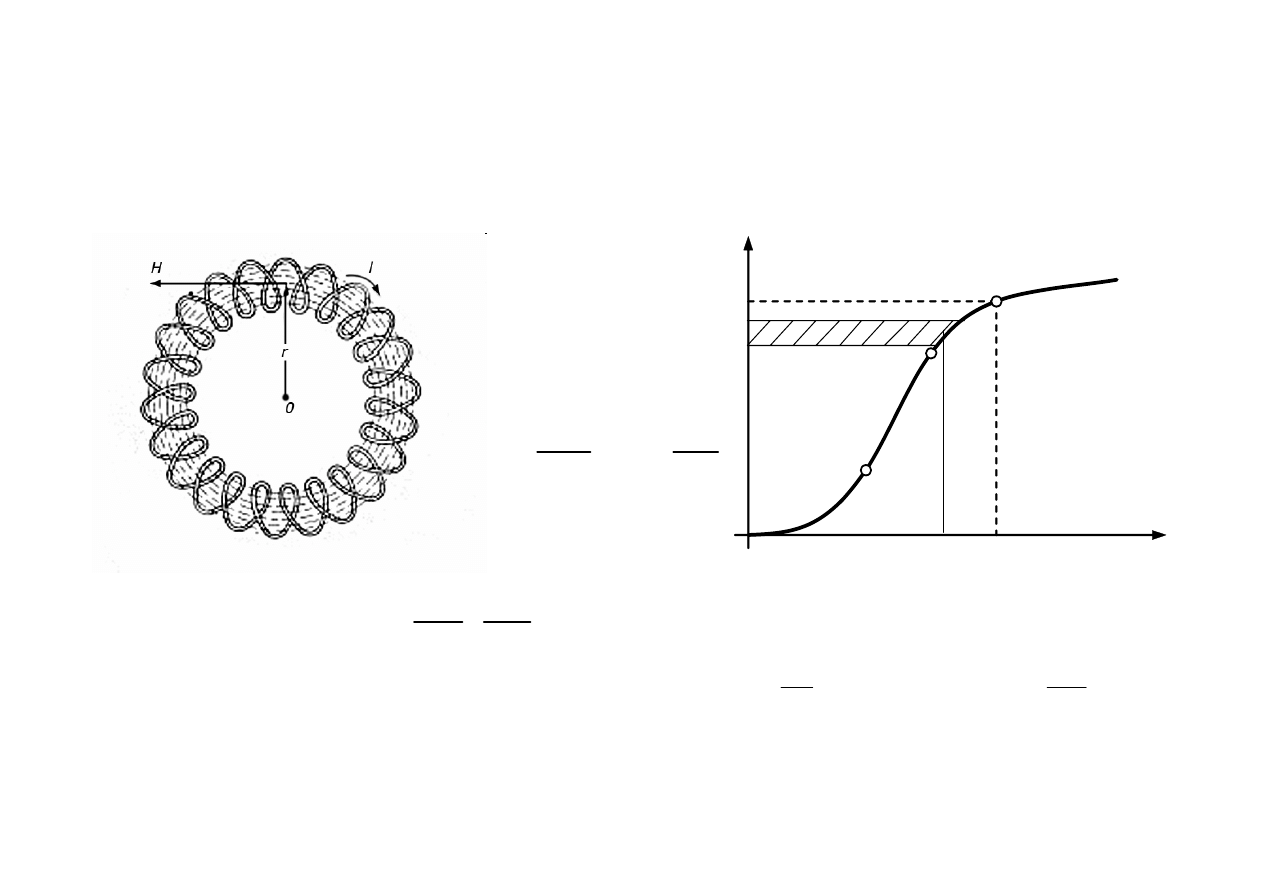
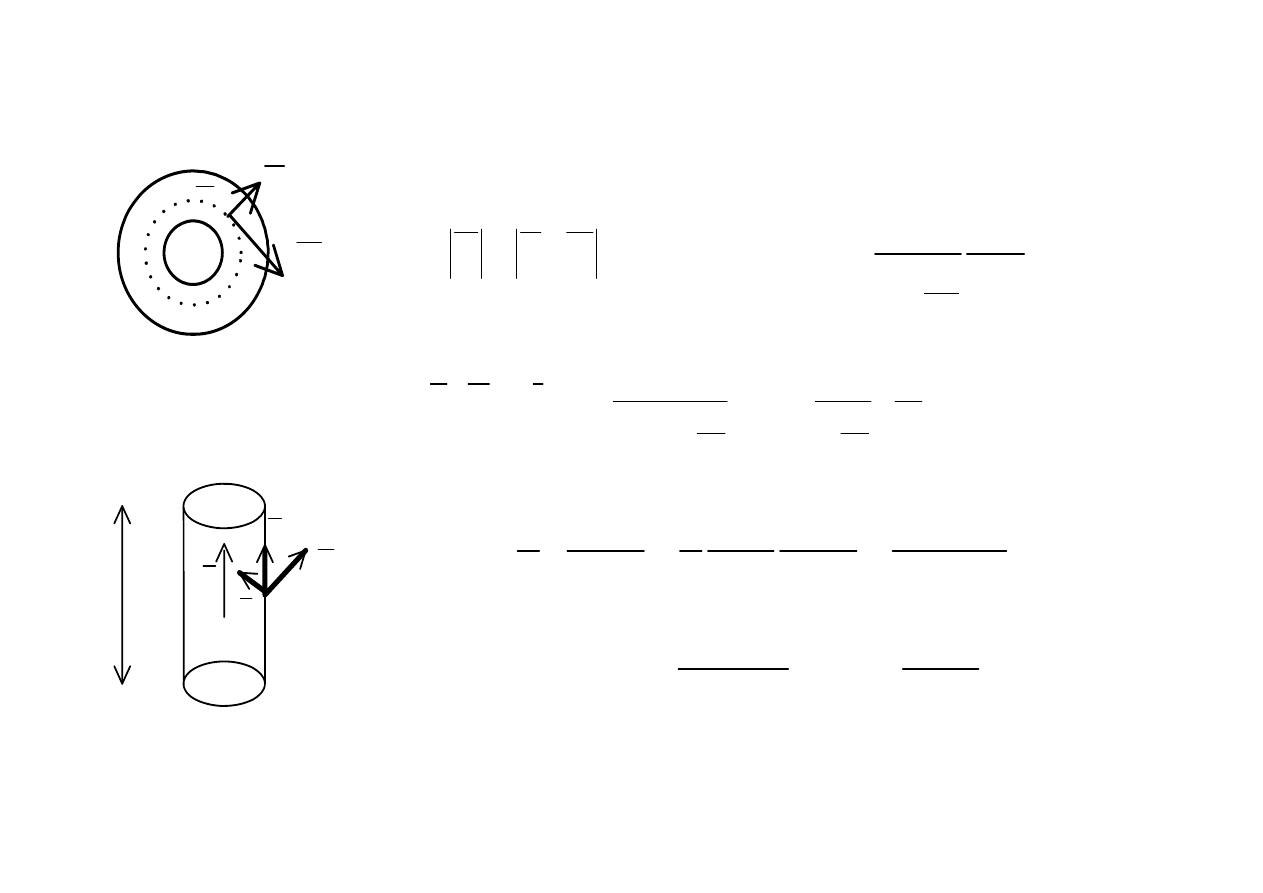
Energia i gęstość energii
Zwojnicy z rdzeniem ferromagnetycznym
H
B
0
1
2
3
H
n
B
n
dB
H
Hl
ni
BS
d
dB
u
n
nS
dt
dt
=
Φ =
Φ
=
=
dB Hl
W
uidt
nS
dt
SlHdB
dt
n
=
=
⋅
=
∫
∫
∫
0
0
'
'
B
B
W
Sl HdB
V HdB
=
=
∫
∫
Gęstość energii
3
0
'
B
W
J
HdB
V
m
ω
⎡
⎤
= =
⎢
⎥
⎣
⎦
∫
pole nieliniowego trójkata
Energia i gęstość energii
W środowisku liniowym
2
0
0
'
1
'
'
2
B
B
B
B
H
HdB
dB
B
ω
μ
μ
μ
= ⇒
=
=
=
∫
∫
2
2
1
1
1
1
2
2
2
2
B
H
HB
H B
ω
μ
μ
=
=
=
=
o
stąd energia zgromadzona w polu magnetycznym
1
2
V
V
W
dv
H Bdv
ω
=
=
∫
∫
o
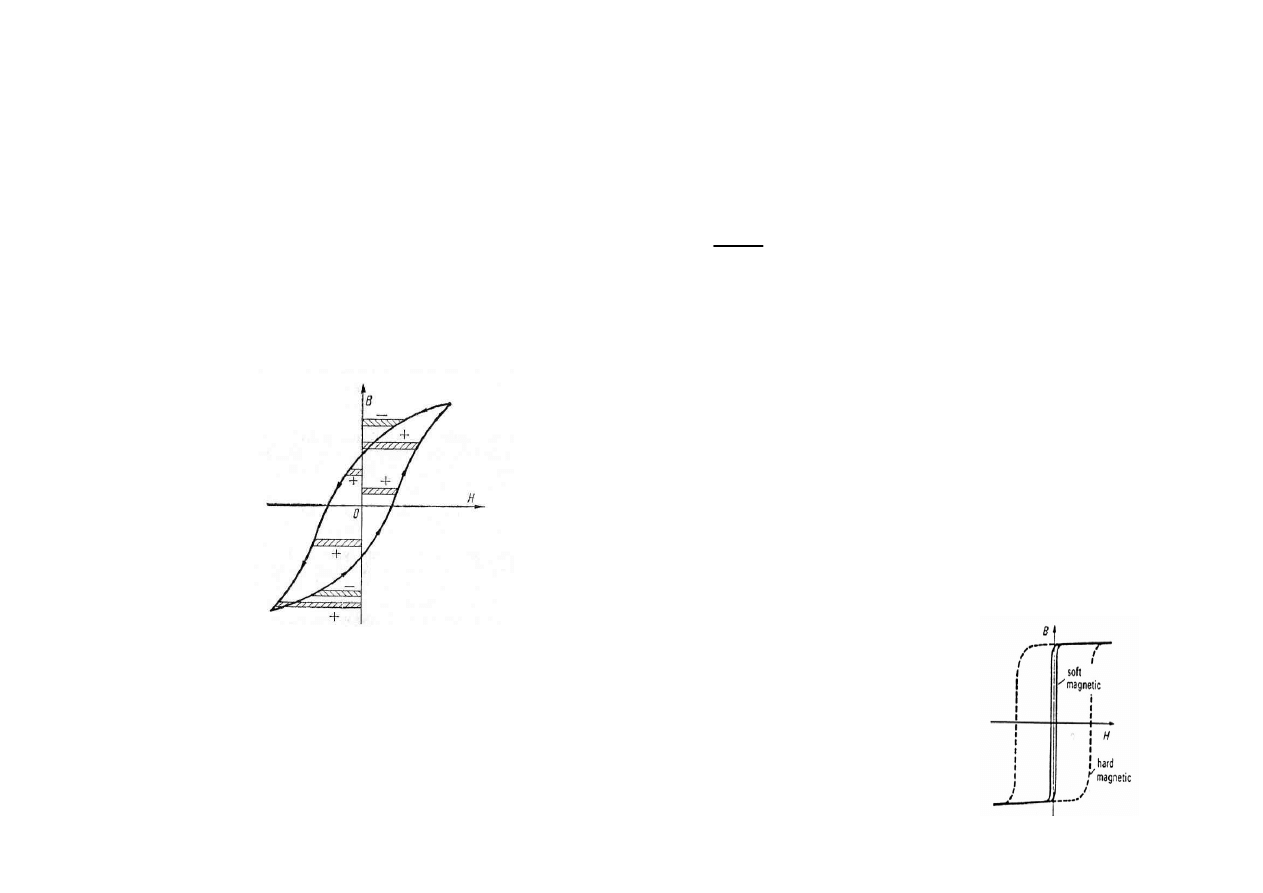
Straty energii związane z histerezą
W
HdB
V
ω
=
=
∫
podczas jednego cyklu straty/m
3
są proporcjonalne
do powierzchni wewnętrznej pętli histerezy.
Moc strat na histerezę za okres odniesiona do jednostki
objętości rdzenia
h
P
f
HdB
=
∫
h
h
W
VtP
=
Straty energii
minimalizacja P
h
– ferromagnetyki miękkie
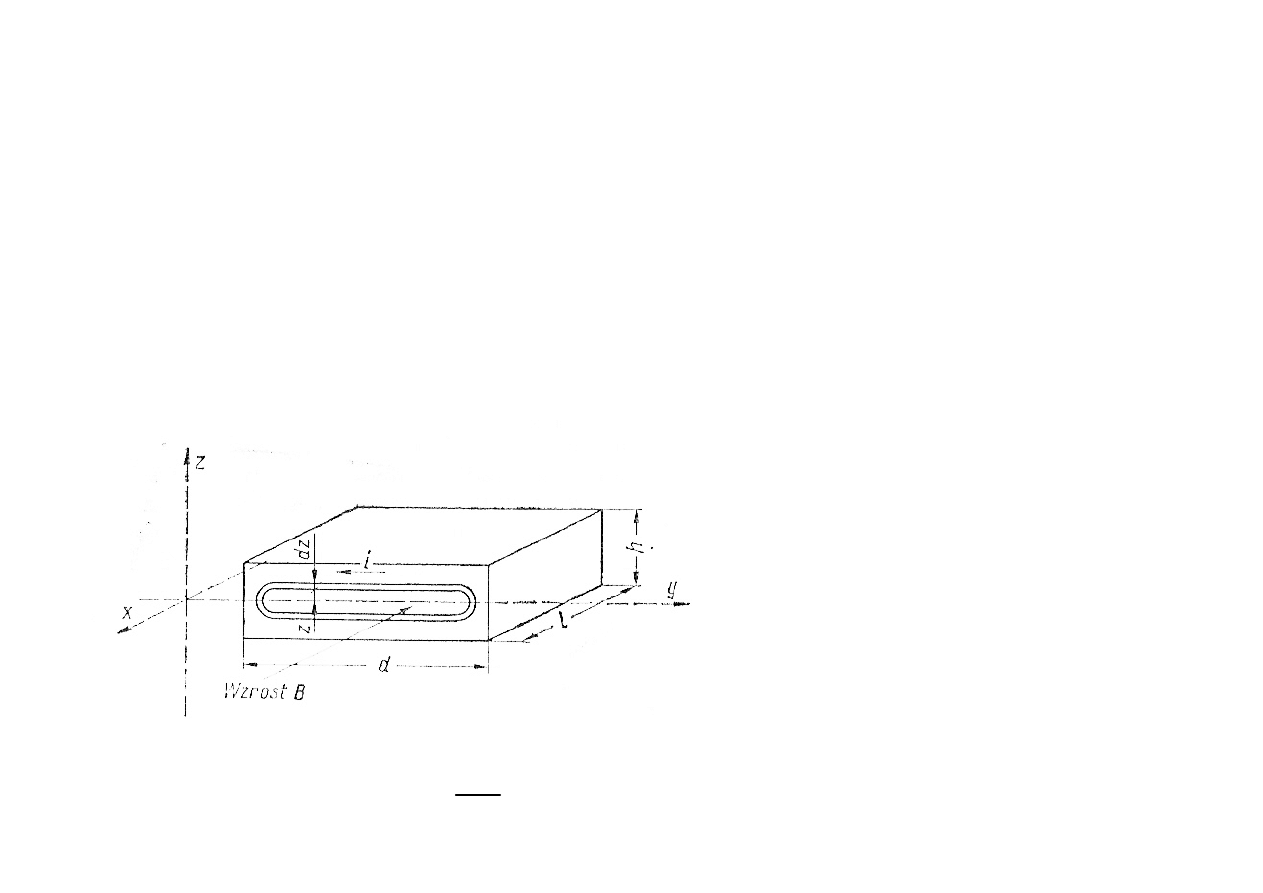
Straty na prądy wirowe
Prądy wirowe są to prądy indukowane w rdzeniu magnetycznym na skutek zmiennego
pola magnetycznego.
Wartość prądów wirowych zależy od:
- częstotliwości zmian pola magnetycznego
- od indukcji magnetycznej w rdzeniu
- od właściwości fizycznych rdzenia, a w szczególności od konduktywności i grubości
Załóżmy:
0
sin
B
B
t
ω
=
h
d
-
-
-pomijamy wpływ „wtórny”
prądów wirowych na „pierwotny”
strumień magnetyczny
- pole magnetyczne w rdzeniu
jest jednorodne
z prawa Faraday’a
0
~
2
cos
d
e
zdB
t
dt
ω
ω
Φ
≈ −
= −
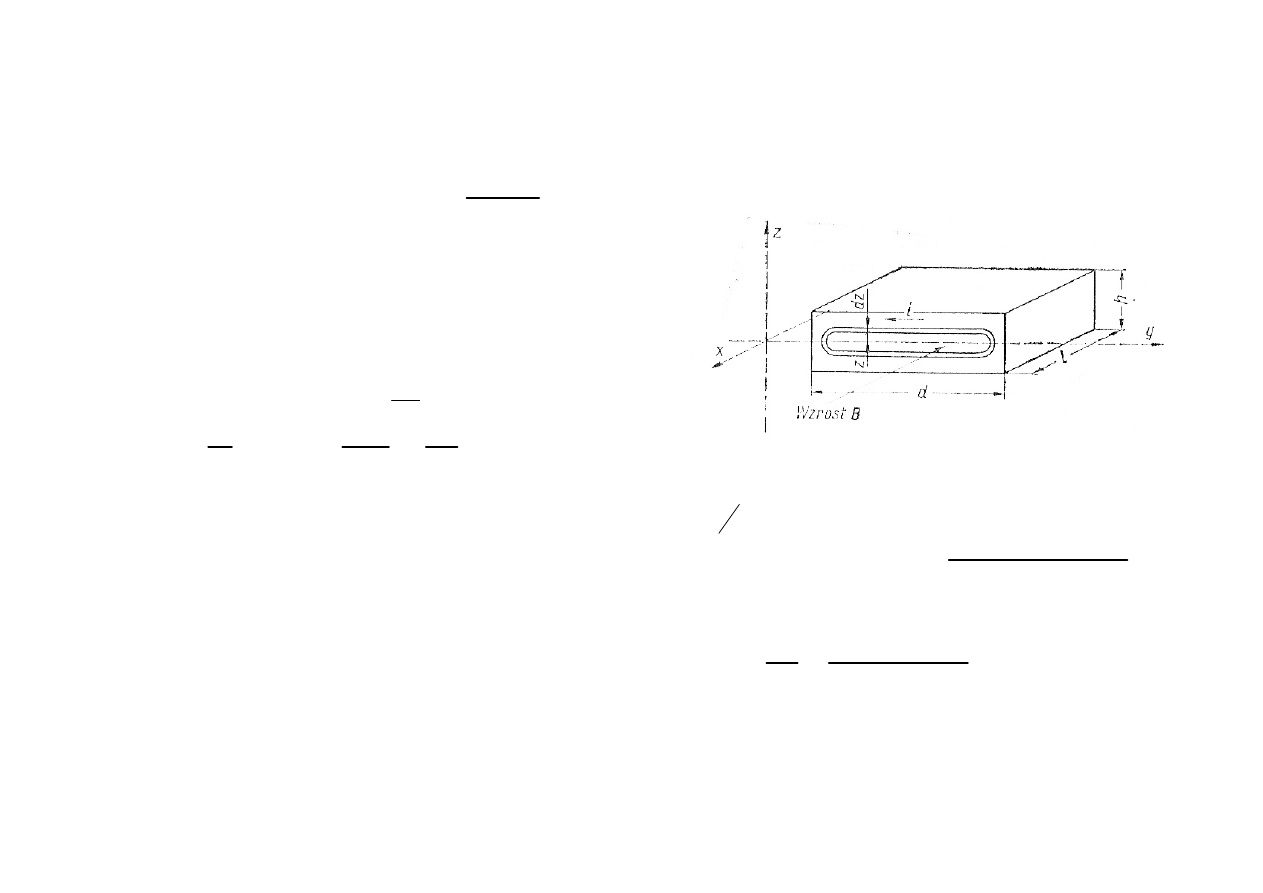
Straty na prądy wirowe
Opór pętli
2d
R
ldz
γ
≈
średnia moc za okres T, tracona
na ciepło w elementarnej pętli
2
2
2
2
2
0
0
0
1
2
T
w
e
dP
eidt
dt
dB lz dz
T
R
ω
ω
ω
γ
Π
=
=
=
Π
∫
∫
Średnia moc tracona w całym rdzeniu
2
2
2
3
2
2
2
2
0
0
0
6
h
w
ldB f
h
P
B ld z dz
γ
ω
γ
Π
=
=
∫
Gęstość mocy tracona na prądy wirowe
2
2
2
2
2
2
2
0
0
6
w
w
P
B f h
p
Kh f
B
V
γ
γ
Π
=
=
=
minimalizacja p
w
: - wykonywać rdzenie z bardzo cienkich blach wzajemnie izolowanych
- stosować materiały magnetyczne o małej konduktywności np. ferryty
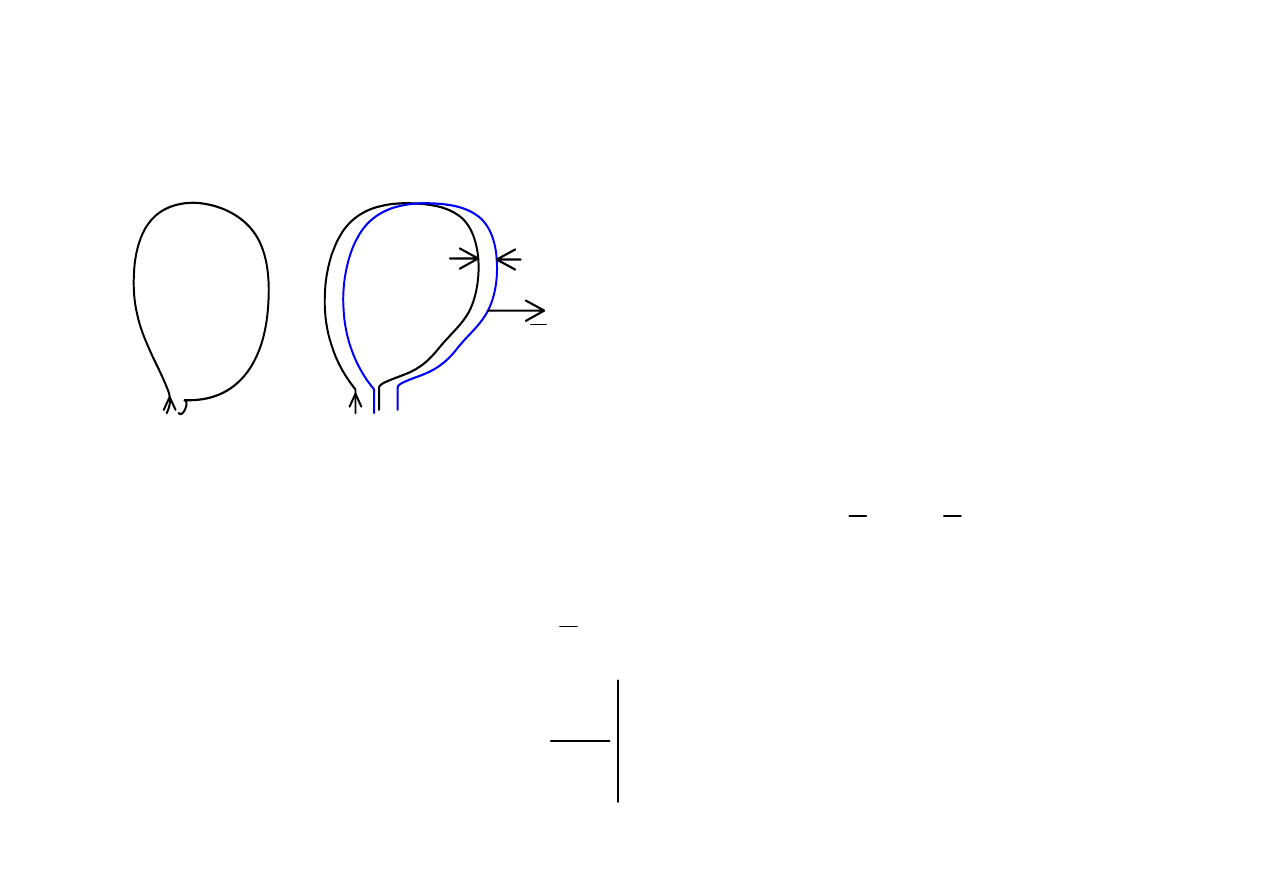
Siły mechaniczne między zwojnicami
1
i
2
i
dx
1
u
2
u
F
Bilans energii przy elementarnym przesunięciu o dx
praca zasilania=wzrost energii pola + praca mech.
1 1
2 2
(
)
x
u i
u i dt
dW
F dx
+
=
+
1
1
2
2
x
i d
i d
dW
Fdx
Ψ +
Ψ =
+
1
1
2
2
1
1
2
2
1
1
2
2
x
i d
i d
d
i
i
Fdx
⎡
⎤
Ψ +
Ψ =
Ψ +
Ψ +
⎢
⎥
⎣
⎦
zakładamy, że i
1
=const. i i
2
= const.
stąd
1
1
2
2
1
(
)
2
x
x
i d
i d
Fdx
czyli
dW
F dx
Ψ +
Ψ =
=
[ ]
1
2
x
i
const
i
const
W
F
N
x
=
=
∂
=
∂
Siły mechaniczne między zwojnicami
rozpiszmy
2
2
1 1
1 2
2 2
1 2
1
1
2
2
x
W
M
F
L i
Mi i
L i
i i
x
x
x
∂
∂
∂
⎛
⎞
=
=
+
+
=
⎜
⎟
∂
∂
∂
⎝
⎠
ponieważ
1
2
0;
0
L
L
x
x
∂
∂
=
=
∂
∂
1 2
x
M
F
i i
x
∂
=
∂
2
1
2
1
R
R
R
d
R
d
(
)
2
2
2
2
0
2
2
0 1 2
1
2
1 1
1
12
3
3
2
2
2
2
2
2
1
1
1
1
2(
)
2
x
x
H
R n
n n R R
i n R
H
M
i
i
R
d
R
d
μ
μ
Π
Π
Φ
=
⇒
=
=
=
+
+
2
2
2
2
0
1 2 1 2
1
2
0
1 2 1 2
1
2
1 2
1 2
5
4
2
2
2
1
3
3
2
2(
)
x
x
i i n n R R d
i i n n R R
M
M
F
i i
F
i i
x
d
d
R
d
μ
μ
Π
Π
∂
∂
=
=
=
= −
≅ −
∂
∂
+
Znak „-” oznacza w tym przypadku wzajemne przyciąganie się cewek,
Co ma zawsze miejsce przy indukcyjności wzajemnej dodatniej
Można powiedzieć, że kierunek wzajemnego oddziaływania cewek
będzie zawsze taki, aby wynikłe stąd przesunięcie powodowało
wzrost indukcyjności wzajemnej.
Siła oddziaływania magnesu
2
2
0
0
1
2
2
2
2
B
B S
Fdl
dW
Sdl
F
μ
μ
⎡
⎤
⎛
⎞
−
=
=
⇒
= − ⎜
⎟
⎢
⎥
⎣
⎦
⎝
⎠
Dla pojedynczej przerwy
2
2
0
0
1
2
2
2
B S
F
B
F
p
HB
S
μ
μ
= −
⇒
=
=
=
Wzór ten pozwala obliczyć siły działające w:
- przekaźnikach
- wirujących maszynach
- lewitacji magnetycznej
Dla B=1T →p=4 KG/cm
2
Przykład:
Elektromagnes w kształcie „U” ma dźwignąć masę 400kg ( razem z masą kotwicy
elektromagnesu ). Żelazne jarzmo ( µr=3000 ) ma przekrój 40 cm2 i średnią
długość 50 cm. Przerwa powietrzna wynosi 0,1 mm .
Zaniedbując reluktancję kotwicy obliczyć wymaganą liczbę zwoi cewki przy prądzie
wymuszającym 1 A.
7
4
2
2
400 9,8 4
10
0
2
40 10
0
2
1,11
2
p
p
B S
mg
Wb
F
mg
B
S
m
μ
μ
−
−
×
× Π×
×
=
=
⇒
=
=
=
z teorii obwodów magnetycznych:
(
)
p
NI
j
ε
=
= Φ ℜ + ℜ
6
6
0
0
6 10
5 10
,
48
48
p
j
p
j
r
l
l
S
S
μ
μ μ
⋅
⋅
ℜ =
=
ℜ =
=
Π
Π
6
6 5
p
p
j
NI
p
ε
ε
ℜ
=
=
ℜ + ℜ
+
ponieważ
0
0
11
162
6
p p
p p
p p
p
B l
B l
H l
N
zwoje
I
μ
μ
ε
=
=
⇒
=
−
Indukcyjność torów symetrycznych
N
1
2
3
0
2r
2
N
r
1N
a
2N
a
3N
a
12
a
23
a
31
a
1
1
2
2
3
3
N
N
A
I
B
I
C
I
N
A
B
C
I
I
I
I
=
+ +
l
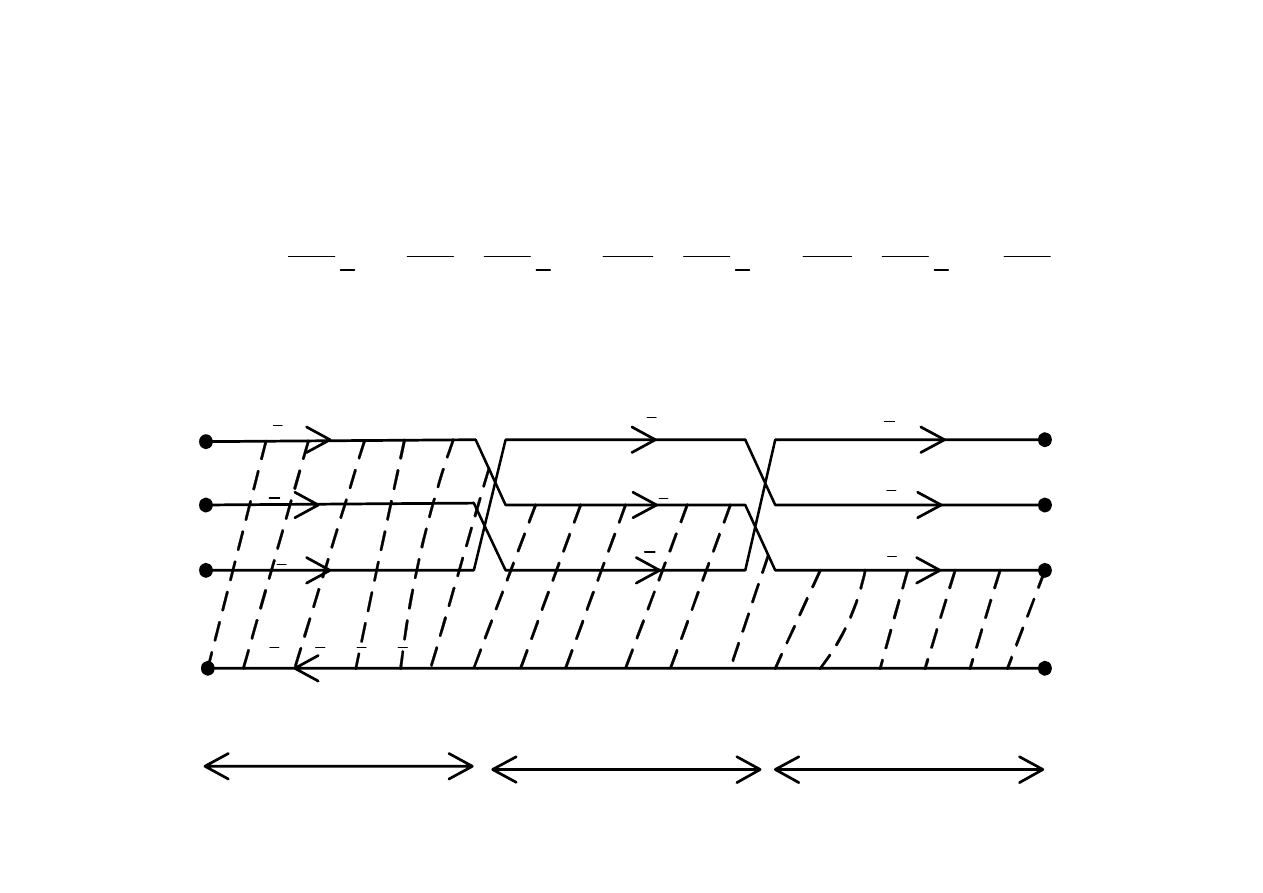
Indukcyjność torów symetrycznych
Strumień okna: przewód 1; przewód N
1
2
3
1
1
0
12
31
ln
ln
ln
ln
2
2
2
2
N
N
N
N
A
B
C
N
N
N
a
a
a
a
l
l
l
l
I
I
I
I
r
a
a
r
μ
μ
μ
μ
Φ =
+
+
+
Π
Π
Π
Π
Symetryzacja toru
1
1
2
2
3
3
N
N
A
I
B
I
C
I
N
A
B
C
I
I
I
I
=
+ +
/ 3
l
/ 3
l
/ 3
l
A
I
A
I
B
I
B
I
C
I
C
I
Indukcyjność torów symetrycznych
Strumień między prądem fazy A a przewodem neutralnym
1
2
3
'
'
'
?
AN
N
N
N
Φ
= Φ + Φ
+ Φ
=
Cykliczna zmiana indeksów co l/3
1
2
3
1
1
0
12
31
'
ln
ln
ln
ln
6
6
6
6
N
N
N
N
A
B
C
N
N
N
a
a
a
a
l
l
l
l
I
I
I
I
r
a
a
r
μ
μ
μ
μ
Φ
=
+
+
+
Π
Π
Π
Π
2
3
1
2
2
0
23
12
'
ln
ln
ln
ln
6
6
6
2
N
N
N
N
A
B
C
N
N
N
a
a
a
a
l
l
l
l
I
I
I
I
r
a
a
r
μ
μ
μ
μ
Φ
=
+
+
+
Π
Π
Π
Π
3
1
2
3
3
0
31
23
'
ln
ln
ln
ln
6
6
6
2
N
N
N
N
A
B
C
N
N
N
a
a
a
a
l
l
l
l
I
I
I
I
r
a
a
r
μ
μ
μ
μ
Φ
=
+
+
+
Π
Π
Π
Π
stąd
1
2
3
1
2
3
1
2
3
1
2
3
3
3
0
12
23 31
12
23 31
ln
ln
ln
ln
6
6
6
2
N
N
N
N
N
N
N
N
N
N
N
N
A
B
C
N
AN
N
a a a
a a a
a a a
a a a
l
l
l
l
I
I
I
I
r
a a a
a a a
r
μ
μ
μ
μ
Φ
=
+
+
+
Π
Π
Π
Π
Indukcyjność torów symetrycznych
1
0
. Przy obciążeniu symetrycznym
0
0
120
240
;
;
0
j
j
B
A
C
A
N
I
I e
I
I e
I
−
−
=
=
=
12
23 31
1
6
3
0
ln
l
A
A
AN
a a a
I
L I
r
μ
Π
Φ
=
=
[ ]
3
12
23 31
1
2
0
ln
2
a a a
l
L
L
H
r
μ
=
=
Π
Indukcyjność toru dla składowej zgodnej
i przeciwnej
2
0
. Przy obciążeniu zerową kolejnością faz
0
0
;
3
A
B
C
N
I
I
I
I
I
I
=
=
=
=
6
1
2
3
0
0
6
3 9
2
0
12
23 31
(
)
ln
(
)
l
N
N
N
A
AN
N
a a a
I
L I
r r a a a
μ
Π
Φ
=
=
[ ]
2
1
2
3
0
2
2
3
3
0
12
23 31
(
)
ln
(
)
l
N
N
N
A
N
a a a
L
I
H
r r a a a
μ
Π
=
Indukcyjność toru dla składowej
symetrycznej zerowej
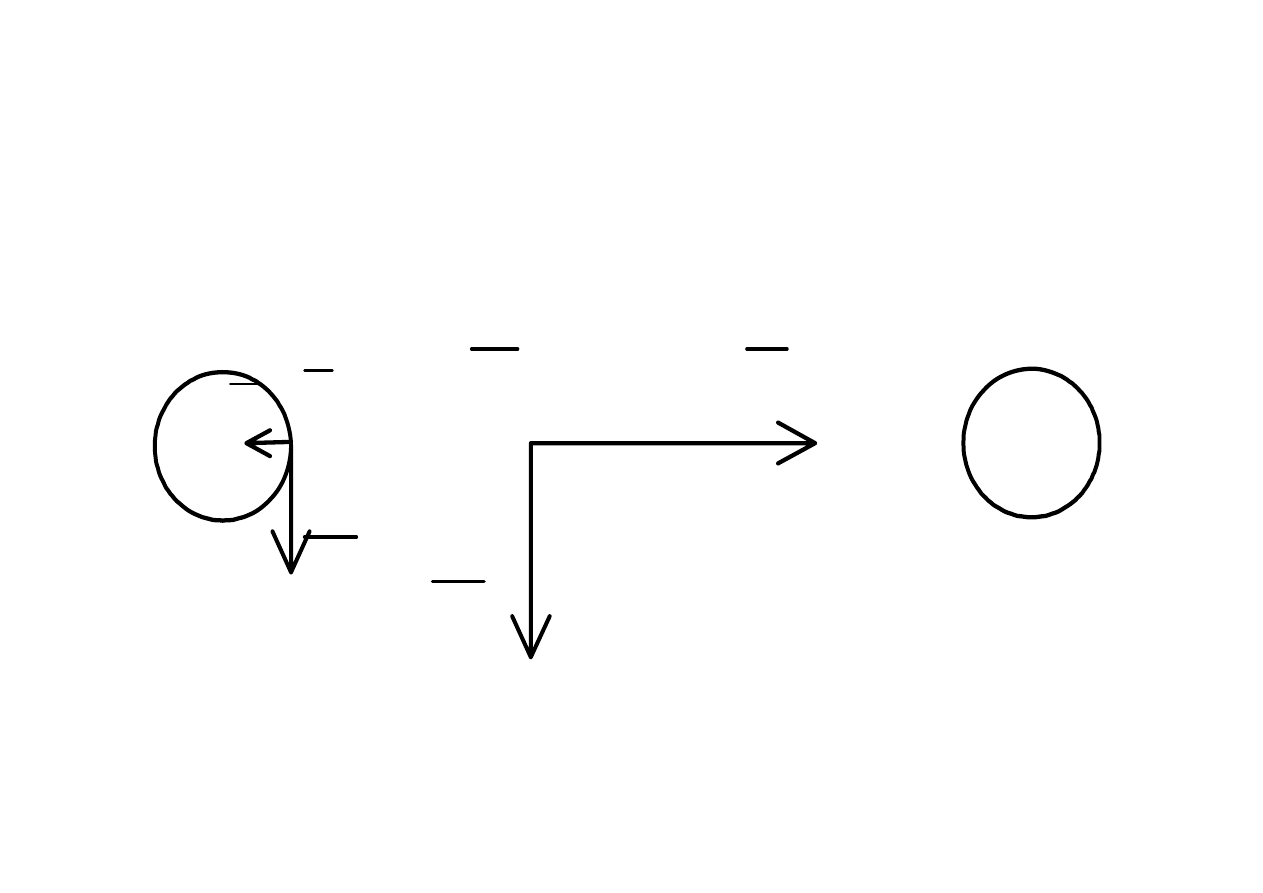
Ruch ładunku w jednorodnym polu magnetycznym
×
×
×
×
×
×
q
B
v
ma
qv B
=
×
d v
m
qv B
dt
=
×
Zakładamy, że
(0, 0,
)
z
B
B
=
(
)
,
,
,
, 0
y
x
z
y
z
x
z
dv
dv
dv
m
m
m
q v B
v B
dt
dt
dt
⎛
⎞
=
−
⎜
⎟
⎝
⎠
1)
2)
3)
0
0
x
y
z
x
x
z
z
z
dv
m
qv B
dt
dv
m
qv B
dt
dv
m
v
konst
dt
=
= −
= ⇒
=
=
z 1)
x
y
z
dv
m
v
qB dt
=
i wstawiamy do 2)
2
2
2
2
x
z
x
z
z
d v
qB
m
qv B
qB
dt
m
= −
2
2
2
2
2
0
x
z
x
d v
q B
v
dt
m
+
=
Ruch ładunku w jednorodnym polu magnetycznym
jeżeli oznaczymy
2
2
0
0
2
0
x
z
x
d v
qB
v
m
dt
ω
ω
=
⇒
+
=
równanie to ma rozwiązanie
1
0
2
0
sin
cos
x
v
A
t
A
t
ω
ω
=
+
1
0
2
0
0
1
cos
sin
x
y
dv
v
A
t
A
t
dt
ω
ω
ω
=
=
−
współczynniki A
1
i A
2
wyznaczamy z warunków początkowych,
np. jeśli dla t=0
0
0
0
0
(0)
( , 0, 0)
(cos
, sin
, 0)
v
v
v
v
t
t
ω
ω
=
⇒
=
−
czyli rozpatrywana cząstka porusza się ze stałą prędkością v
0
po leżącym na
płaszczyźnie xy okręgu o promieniu R=v
0
/ω
0
Jeżeli cząstka ma niezerową składową v
z
to tor ruchu cząstki staje się linią śrubową
Pole elektromagnetyczne
Pojęcie prądu przesunięcia
( )
S V
j
j
j
j
prąd wypływający z zamkniętej powierzchni S(V) wynosi:
( )
( )
( )
S V
S V
S V
dQ
d
D
j d s
D d s
d s
dt
dt
t
∂
= −
= −
= −
∂
∫
∫
∫
o
o
o
stąd
( )
0
S V
V
D
D
j
d s
div j
dv
dt
dt
⎛
⎞
⎛
⎞
∂
∂
+
= =
+
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
∫
∫
o
Z dowolności V wynika
0
D
div j
dt
⎛
⎞
∂
+
=
⎜
⎟
⎝
⎠
Czyli, wektor
D
j
dt
∂
+
- jest bezźródłowy ( o wymiarze A/m
2
)
Całkując równanie po dowolnej powierzchni S
Pole elektromagnetyczne
Maxwell zaproponował rozszerzenie prawa przepływu dla pól zmiennych o
składową prądu przesunięcia
D
rot H
j
t
∂
= +
∂
co stanowi uogólnienie prawa przepływu dla magnetostatyki
D
t
∂
∂
- gęstość prądu przesunięcia
D
j
t
∂
+
∂
- gęstość prądu całkowitego
Jest to II równanie Maxwella dla pól elektromagnetycznych
Pole elektromagnetyczne
otrzymamy całkową postać II równania Maxwella
S
S
D
rot H d s
j
d s
czyli
t
⎛
⎞
∂
=
+
⎜
⎟
∂
⎝
⎠
∫
∫
o
o
( )
L S
S
S
D
H d l
j d s
d s
t
∂
=
+
∂
∫
∫
∫
o
o
o
Prąd transportu
Prąd przesunięcia
gdy
0
j
=
to przy
0
D
t
∂
≠
∂
pole H jest wirowe
0
rot H
≠
Prąd polaryzacji i straty energii w dielektryku
Prąd przesunięcia składa się z dwóch części
0
D
E
P
t
t
t
ε
∂
∂
∂
=
+
∂
∂
∂
S
P
d s
t
∂
∂
∫
o
-prąd polaryzacji związany z przemieszczaniem i obrotem dipoli
- w próżni jest on zerowy
-ze wzrostem częstotliwości rośnie składowa prądu polaryzacji
obroty dipoli związane są ze stratami energii
Np. dla kondensatora płaskiego w jednostce objętości
1
1
D
uidt
El
j
Sdt
E
jdt
E d D
V
V
t
⎛
⎞
∂
=
+
=
+
⎜
⎟
∂
⎝
⎠
∫
∫
∫
∫
o
o
o
Ciepło Joule’a
Energia pobrana
przez pole w materii
Równania Maxwella
D
rot H
j
t
∂
= +
∂
( )
(
)
L S
S
D
H d l
j
d s
t
∂
=
+
∂
∫
∫
o
o
Postać całkowa
Postać różniczkowa
I równanie Maxwella
( )
L S
S
d
E d l
B d s
dt
= −
∫
∫
o
o
B
rot E
t
∂
= −
∂
II równanie Maxwella
III równanie Maxwella
( )
v
S V
V
D d s
q dv
=
∫
∫
o
v
divD
q
=
IV równanie Maxwella
( )
0
S V
B d s
=
∫
o
0
divB
=
Równania materiałowe
0
0
0
v
D
E
P
B
H
M
j
E
q u
ε
μ
μ
γ
=
+
=
+
=
+
0
0
r
r
D
E
E
B
H
E
ε
ε ε
μ
μ μ
=
=
=
=
Warunki brzegowe
2
1
2
1
t
t
n
n
H
H
K
B
B
−
=
=
1
2
1
2
1
2
1
2
0
n
H
n
H
K
n
D
n
D
×
+ ×
=
+
=
o
o
1
2
2
1
t
t
s
n
n
E
E
q
j
j
t
=
∂
−
= −
∂
Pole elektryczne
1
2
2
1
t
t
n
n
s
E
E
D
D
q
=
−
=
1
2
1
2
1
2
1
2
0
s
n
E
n
E
n
D
n
D
q
×
+ ×
=
+
=
o
o
Pole magnetyczne
Pole przepływowe
1
2
1
2
1
2
1
2
0
s
n
E
n
E
q
n
j
n
j
t
×
+ ×
=
∂
+
= −
∂
o
o
Wektor Poyntinga
V
dV
Energia pobrana przez obszar dV
przez czas dt
(
)
dW
E
jdt
H d B
E d D dV
=
+
+
o
o
o
B
D
dW
E
j
H
E
dVdt
t
t
⎛
⎞
∂
∂
=
+
+
⎜
⎟
∂
∂
⎝
⎠
o
o
o
Moc pobierana przez element dV
dW
B
D
E
j
H
E
dV
dt
t
t
⎛
⎞
∂
∂
=
+
+
⎜
⎟
∂
∂
⎝
⎠
o
o
o
a przez cały obszar V
V
B
D
P
E
j
H
E
dV
t
t
⎛
⎞
∂
∂
=
+
+
⎜
⎟
∂
∂
⎝
⎠
∫
o
o
o
(
)
(
)
(
)
B
D
E
j
H
E
E
j
H
rot E
E
rot H
j
t
t
Erot H
Hrot E
div E H
⎛
⎞
∂
∂
+
+
=
+
−
+
−
=
⎜
⎟
∂
∂
⎝
⎠
=
−
= −
×
o
o
o
o
o
o
Wektor Poyntinga
(
)
(
)
( )
V
S V
P
div E H dV
E H
d s
= −
×
= −
×
∫
∫
o
Moc wyprowadzenia energii poza obszar V
(
)
( )
S V
P
E H
d s
− =
×
∫
o
Strumień wektora
(
)
E H
×
Jest mocą wypromieniowaną z obszaru V
Wektor
(
)
E H
Π =
×
- wektor Poyntinga - wektor gęstości mocy [ W/m
2
]
V
dV
Transport mocy w kablu jedno żyłowym
koncentrycznym
×
I
⊗
E
H
Π
2
1
sin 90
2
ln
o
U
I
E H
EH
EH
R
r
r
R
Π = ×
=
=
=
Π
(
)
2
2
1
1
2
2
2
2
0
1
1
2
ln
ln
R
R
S
R
R
UI
UI
dr
E H
d s
rdrd
UI
P
moc
R
R
r
r
R
R
ϕ
Π
×
=
=
=
= =
Π
∫
∫ ∫
∫
o
2
2
2
3
1
1
1
1
1
1
2
2
2
I
I
I
I
EH
j
R
R
R
R
γ
γ
γ
=
=
=
Π
Π
Π
Π
2
2
2
1
1
2
3
2
1
1
2
2
2
S
I
l
EHds
EH
R l
R l
I
RI
R
R
γ
γ
=
Π
=
Π
=
=
Π
Π
∫
j
E
H
l
Π
Energia płynie do odbiornika przez przestrzeń otaczającą przewody
i częściowo dopływa ( jest tracona na ciepło ) do wnętrza przewodu
Linia 2 przewodowa
×
•
⊗
E
H
Π
⊗
H
Π
E
Wyszukiwarka
Podobne podstrony:
OBWODY ELEKTRYCZNE i MAGNETYCZNE w5
OBWODY ELEKTRYCZNE i MAGNETYCZNE wyklad 1
OBWODY ELEKTRYCZNE i MAGNETYCZNE w2
OBWODY ELEKTRYCZNE i MAGNETYCZNE w4
OBWODY ELEKTRYCZNE i MAGNETYCZNE w7
OBWODY ELEKTRYCZNE i MAGNETYCZNE w3
OBWODY ELEKTRYCZNE i MAGNETYCZNE w5
Obwody sprzężone magnetycznie, ►Studia, Semestr 3, Elektrotechnika Laboratorium, Instrukcje
Obwody elektryczne
Obwody elektryczne I
4 Elektryczność i magnetyzm
Korzybski Obwody elektryczne 3 Laboratorium
,Elektrycznosc i magnetyzm, prz Nieznany (2)
więcej podobnych podstron