Sprawozdanie laboratorium 6
Badanie powtarzalności robota Adept Viper
Roboty przemysłowe
Prowadzący: dr Inż. J. Bednarz
Imię: Michał
Nazwisko: Grudziński
IMIR Grupa 24
1. Opis stanowiska laboratoryjnego.
Stanowisko laboratoryjne składa się z robota Adept Viper oraz z dwóch czujników
położenia z diodą laserową OMRON Z4M. Sygnał wzmacniany jest przez
wzmacniacz OMRON W100 i przesyłany za pośrednictwem rejestratora cyfrowego
TEAC GX-1 do komputera pomiarowego z oprogramowaniem GX-1 Navigator i Gx
View.
2. Opis przeprowadzonego pomiaru.
Celem wykonania pomiarów było wyznaczenie powtarzalności robota Adept Viper.
Pomiar przeprowadzono dla 4 kombinacji prędkości oraz zadanych punktów P1 i P2.
W każdym pomiarze trajektoria wykonywana była 20 razy. Czujniki mierzyły
odległość do punktu PP w dwóch kierunkach, x i y.
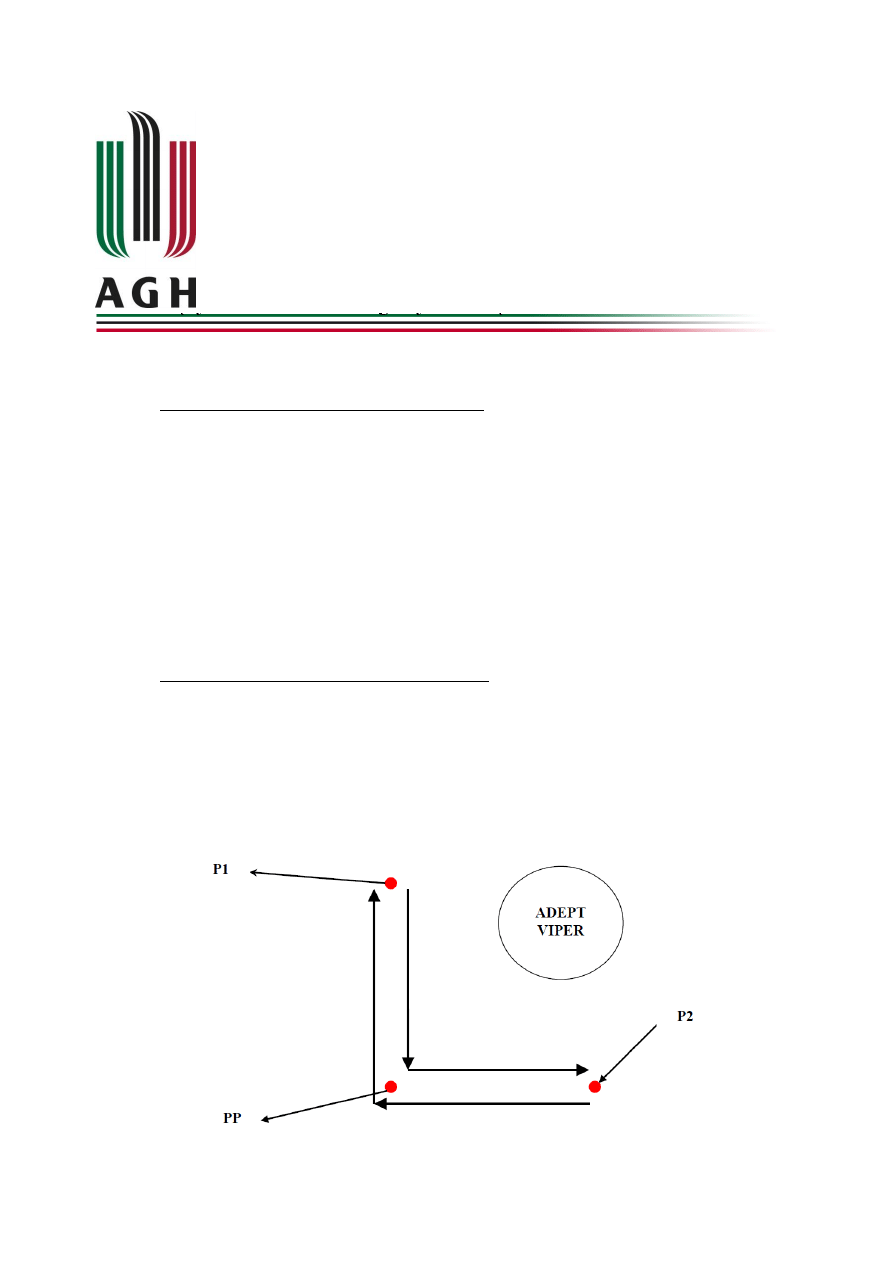
Sekwencja ruchów:
Ruch z P1 do PP - dojście z kierunku X,
Postój 1 sekunda w PP,
Ruch z PP do P2,
Ruch z P2 do PP – dojście z kierunku Y,
Postój 1 sekunda w PP,
Ruch z PP do P1 .
Zadane położenia punktów P1 i P2, oraz prędkości manipulatora:
P1X P1Y, prędkość 40%
P1X P1Y, prędkość 75%
P3X P2Y, prędkość 75%
P3X P2Y, prędkość 40%
3.
Algorytm wyznaczenia powtarzalności pozycjonowania
Określenie przedziałów, dla których czujniki rejestrują odległość od punktu
PP w momencie postoju efektora.
Uśrednienie odległości.
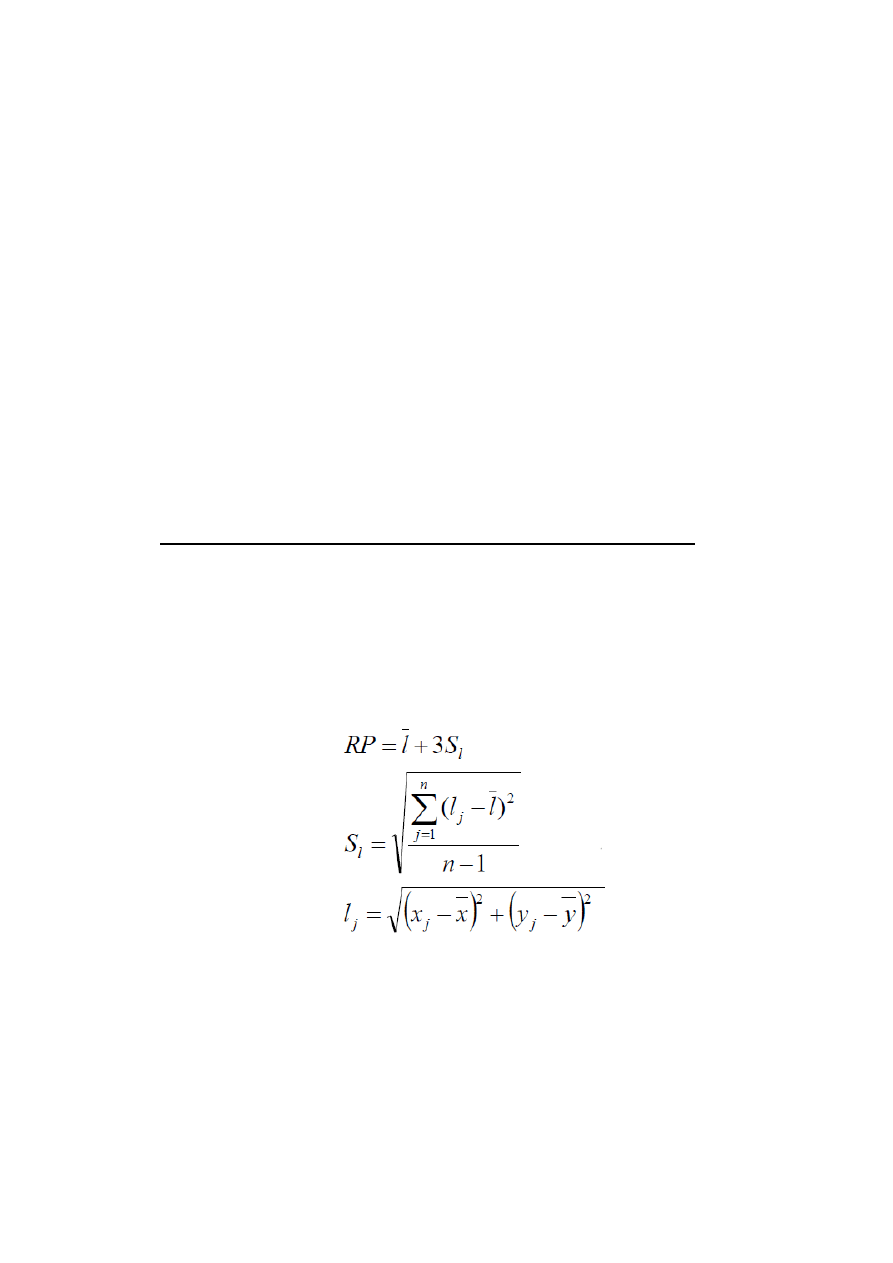
Obliczenie powtarzalności w oparciu o następujące wzory:
Powtarzalności dla każdego pomiaru była liczona osobno na kierunkach X i Y.
Przeskalowanie otrzymanego w voltach wyniku na milimetry ( 0.1 V/mm).
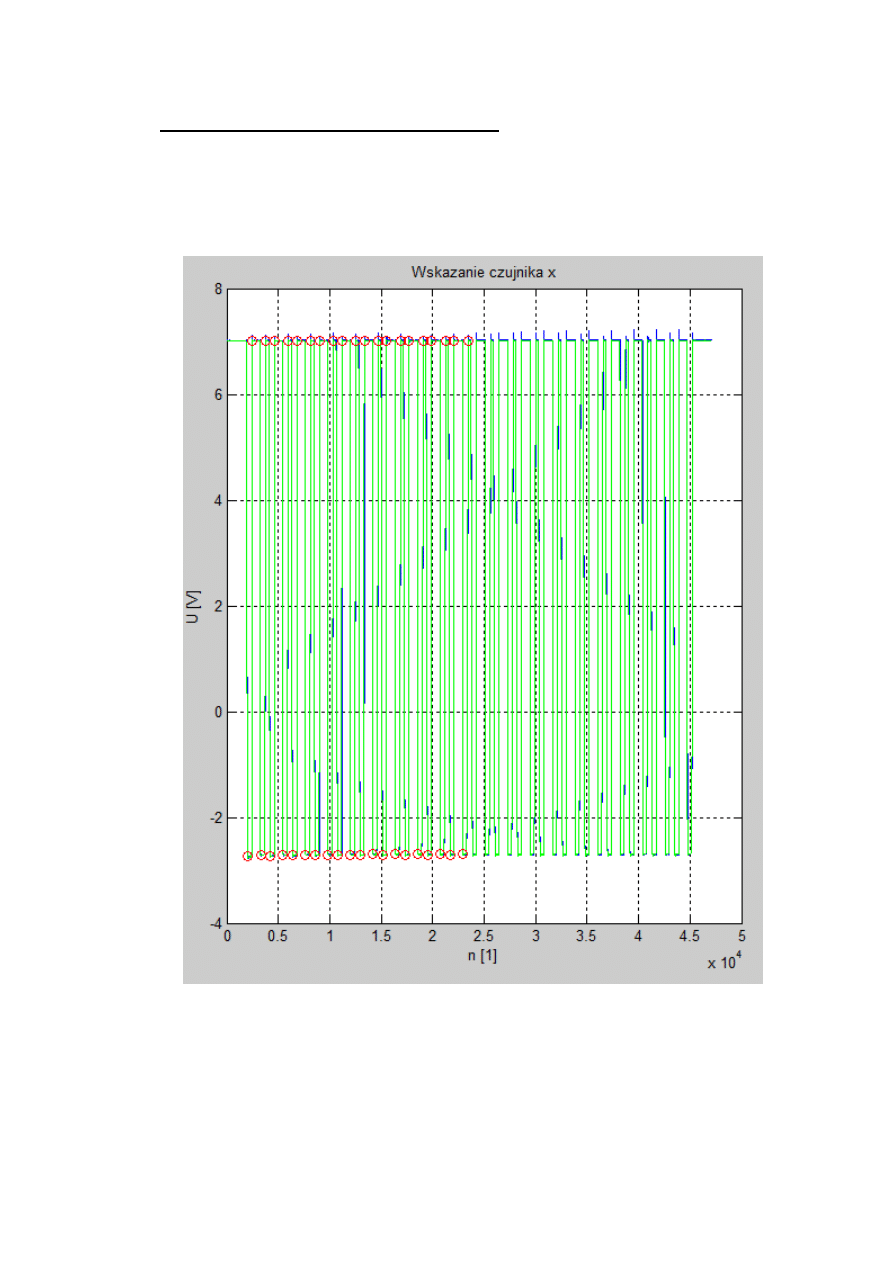
4. Opis zarejestrowanych przebiegów
Wykresy dotyczą pierwszego z przeprowadzonych pomiarów:
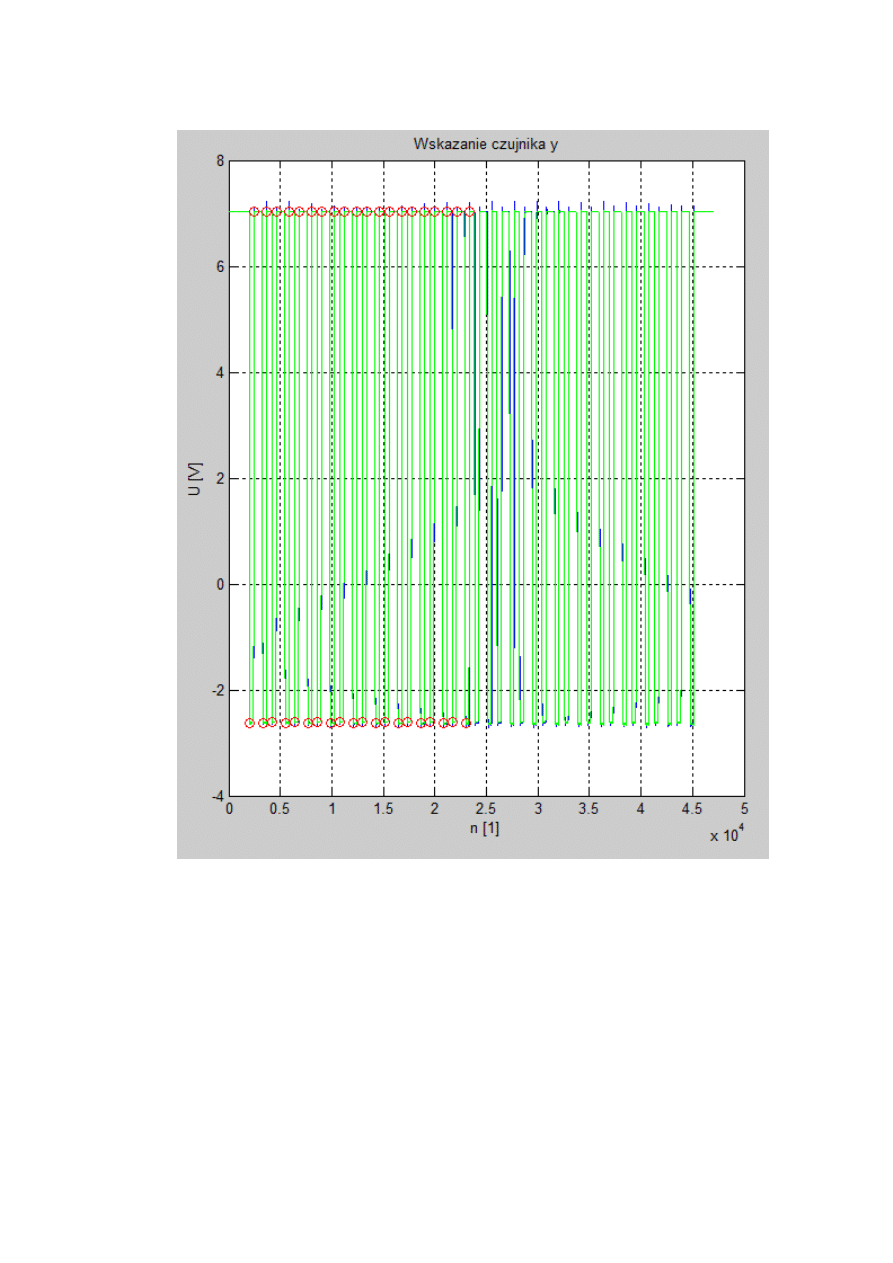
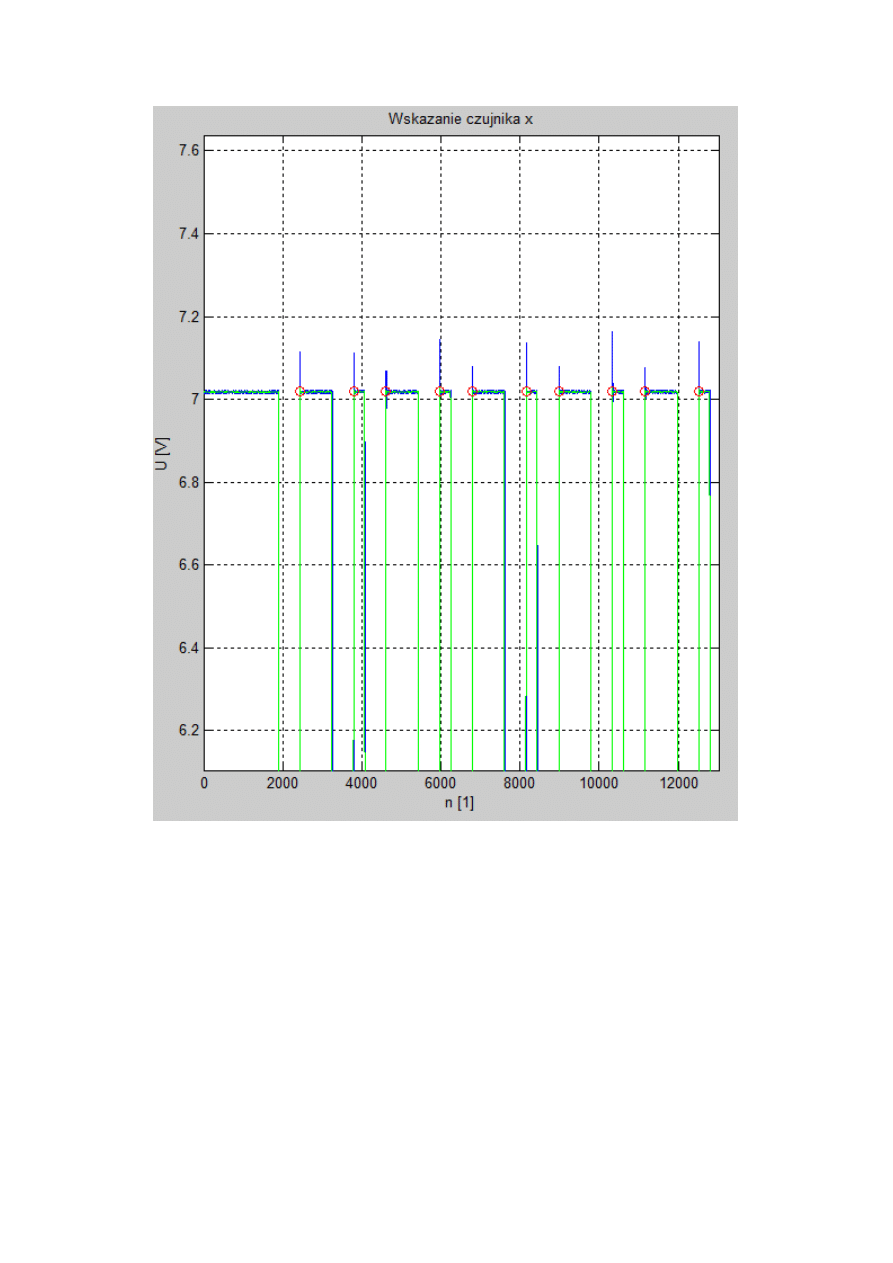
P1X P1Y, prędkość 40%
RPpx = 0.2934
RPpy = 0.2375
P1X P1Y, prędkość 75%
RPpx = 0.2802
RPpy = 0.2809
P3X P2Y, prędkość 75%
RPpx = 0.3039
RPpy = 0.2538
P3X P2Y, prędkość 40%
RPpx = 0.3037
RPpy = 0.2220

6. Wnioski.
Powtarzalność jest zależna od kierunku z którego efektor zbliżał się do punktu
pomiarowego.
W pierwszych dwóch pomiarach powtarzalność z kierunku x jest zawsze lepsza w
stosunku do powtarzalności z kierunku y, natomiast w pozostałych dwóch możemy
zaobserwować sytuację odwrotną.
Wraz ze wzrostem prędkości efektora pogarsza się powtarzalność, wynika to ze
wzrostu siły bezwładności, co bezpośrednio prowadzi do pojawienia się drgań
efektora.
Wyszukiwarka
Podobne podstrony:
Lab6 5 id 260087 Nieznany
konspekt lab6 id 245555 Nieznany
JPPO Lab6 id 228824 Nieznany
dsp lab6 id 144061 Nieznany
lab6(1) 3 id 260153 Nieznany
AKiSO lab6 id 53769 Nieznany
Grudziński gr24a lab6
Lab6 5 id 260087 Nieznany
Lab2a Grudzinski Krawiec id 259 Nieznany
lab6 rozwiazywanie rownan id 26 Nieznany
INFO za GRUDZIEN 2009 id 213302 Nieznany
lab6 sprawozdanie id 604266 Nieznany
Lab6 OZE id 260136 Nieznany
Lab2 Grudzinski Krawiec id 2593 Nieznany
Lab6 KWW TOPCAM id 260126 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
więcej podobnych podstron