
1. Metody numeryczne (analiza numeryczna) – Dział matematyki stosowanej zajmujący się opracowaniem metod
przybliżonego rozwiązywania skomplikowanych zagadnień matematycznych, których rozwiązanie byłoby nadzwyczaj
żmudne lub niemożliwe choćby poprzez konieczność wykonania nieskończenie wielu operacji.
2. Układ równań zawierający n niewiadomych
{
a
11
x
1
a
12
x
2
...a
1n
x
n
=b
1
a
21
x
1
a
22
x
2
...a
2n
x
n
=b
2
..............
a
n1
x
1
a
n2
x
2
...a
nn
x
n
=b
n
3. Macierzowa reprezentacja układu n niewiadomych
A
⋅X=B → X=A
−1
⋅B
, gdzie:
A
=
[
a
11
a
12
...
a
1n
a
21
a
22
...
a
2n
...
...
...
...
a
n1
a
n2
...
a
nn
]
X
=
[
x
1
x
2
...
x
n
]
B
=
[
b
1
b
2
...
b
n
]
A – macierz główna układu
X – wektor wyrazów wolnych
B – wektor wyrazów wolnych
Układ równań posiada jedno rozwiązanie tylko wtedy, gdy jest oznaczony, tzn. macierz główna układu równań A nie jest
osobliwa.
4. Układ równań, w którym tylko główna przekątna macierzy A ma elementy niezerowe
{
a
11
x
1
=b
1
a
22
x
2
=b
2
...
a
nn
x
n
=b
n
Algorytm:
x
i
=
b
i
a
ii
, a
ii
≠0, i=1,2 , ..., n
5. Trójkątny układ równań
{
a
11
x
1
a
12
x
2
...a
1n
x
n
=b
1
a
22
x
2
...a
2n
x
n
=b
2
..............
a
nn
x
n
=b
n
Algorytm:
x
n
=
b
n
a
nn
, x
i
=
b
i
−
∑
s
=i1
n
a
is
x
s
a
ii
, i
=n−1, n−2, ...,1
Przy czym:
a
ii
≠0 , i=1,2 ,... , n
6. Metoda Thomasa dla układów trójprzekątniowych:
[
b
1
c
1
a
2
b
2
c
2
a
3
b
3
c
3
..
..
..
a
n
−1
b
n
−1
c
n
−1
a
n
b
n
]
⋅
[
x
1
x
2
x
3
...
x
n
−1
x
n
]
=
[
d
1
d
2
d
3
...
d
n
−1
d
n
]
Algorytm:
a
i
x
i
−1
b
i
x
i
c
i
x
i
1
=d
i
, i
=1,2 , ..., n
a
1
=0 , c
n
=0
Wzory:
1
=−
c
1
b
1
,
1
=
d
1
b
1
, x
n
=
n
, x
i
=
i
⋅x
i
1
i
dla :
i
=n−1, n−1, ...,1
i
=−
c
i
a
i
i
−1
b
i
,
i
=
d
i
−a
i
i
−1
a
i
i
−1
b
i
dla :
i
=2,3 , ..., n
7. Metoda Cramera (Wyznacznikowa)
W
=
[
a
11
a
12
...
a
1n
a
21
a
22
...
a
2n
...
...
...
...
a
n1
a
n2
...
a
nn
]
Algorytm
:
x
n
=
[W
n
]
[W ]
,
∣W ∣≠0
b podstawiamy w kolumnę odpowiednią liczonemu x
8. Metoda eliminacji Gaussa: Jest to metoda służąca jedynie do upraszczania układów. Jej celem jest sprowadzenie n
pierwszych kolumn macierzy C do macierzy trójkątnej. Następnie pozostaje już tylko rozwiązanie macierzy trójkątnej.
Macierze A i B zapisujemy to w postaci macierzy C, w której macierz główną uzupełnia się dodatkową kolumną
zawierającą wektor wyrazów wolnych B.
C
=
[
a
11
a
12
... a
1n
b
1
a
21
a
22
... a
2n
b
2
...
...
...
...
...
a
n1
a
n2
... a
nn
b
nn
]
=
[
c
11
c
12
...
c
1n
c
1, n
1
c
21
c
22
...
c
2n
c
2, n
1
...
...
...
...
...
c
n1
c
n2
...
c
nn
c
n ,n
1
]
Kroki
Jeżeli
c
11
≠0
Odejmujemy pierwsze równanie pomnożone przez
c
i1
c
11
od każdego kolejnego i-tego równania, przy
czym:
i
=
2,3
,
...
, n
zaś obliczone współczynniki zapisujemy w miejscu poprzednich. Następnie przeprowadzamy
analogiczne operacje aż do uzyskania macierzy trójkątnej. Po n-1 krokach mamy:
C
n
−1
=
[
c
11
c
12
c
13
...
c
1n
c
1, n
1
0
c
22
1
c
23
1
...
c
2n
1
c
2, n
1
1
0
0
c
33
2
...
c
3n
2
c
3, n
1
2
...
...
...
...
...
...
0
0
0
... c
nn
n−1
c
n , n
1
c−1
]
Algorytm:
{
s
=1,2, ... , n−1
{
i
=s1, s2,... , n
c
ij
s
=c
ij
s−1
−
c
is
s−1
c
ss
s−1
⋅c
sj
s−1
j
=s1, s2, ..., n1
9. Aproksymacja funkcji jednej zmiennej – Dana jest funkcja jednej zmiennej
y
=f x , x ∈[a , b]
Należy dobrać taką
funkcję
F
x , p
1
, ... , p
k
, x ∈[a , b]
aby możliwie jak najdokładniej odtworzyć przebieg funkcji f(x), czyli
zminimalizować różnice pomiędzy odpowiednimi wartościami w punktach
x
i
, y
i
, i=1,2, ..., n
Gdzie:
p
1
, ..., p
k
To parametry wzoru empirycznego.
Aproksymacja polega na dobraniu parametrów
p
1
, ... , p
k
wzoru empirycznego w taki sposób aby pełnione było
kryterium minimalizacji odchyłek.
Rodzaje aproksymacji:
Aproksymacja punktowa – funkcja f(x) jest zadana jako zbiór punktów
f
x
1
=y
1
, f
x
2
=y
2,
... , f
x
n
=y
n
Aproksymacja integralna - funkcja f(x) jest zadana w formie wzoru analitycznego
10.Odchyłka -
i
=F x
i
, p
1
, ... , p
k
−y
i
Kryteria minimalizacji odchyłek:
~wybranych punktów
~średnich
~sumowania bezwzględnych wartości
~najmniejszych kwadratów
11.Metoda najmniejszych kwadratów -
Dobór współczynników funkcji
F
∑
i
=1
n
i
2
=min
Kryterium najmniejszych kwadratów
∑
i
=1
n
[F x
i
, p
1
,... , p
k
−y
i
]
2
=min
Zalety:
~kryterium jest mocne, zawiera kwadraty odchyłek, a więc liczby nieujemne
~Prostota obliczeń minimum funkcji pod warunkiem, że rozpatruje się aproksymację w klasie wielomianów
uogólnionych:
F
x , p
1
, ... , p
k
=p
1
1
x p
2
2
x...p
k
k
x
12.Aproksymacja liniowa funkcji jednej zmiennej -
Dany jest zbiór punktów:
x
1
, y
1
, x
2
, y
2
, ..., x
n
, y
n
Funkcja aproksymująca:
y
=p
1
p
2
x
Kryterium najmniejszych kwadratów:
S
p
1
, p
2
=
∑
i
=1
n
[p
1
p
2
x
i
−y
i
]
2
=min
Warunek konieczny istnienia ekstremum funkcji dwóch zmiennych:
∂S p
1
, p
2
∂ p
1
=2
∑
i
=1
n
[p
1
p
2
x
i
−y
i
]=0
∂S p
1
, p
2
∂ p
2
=2
∑
i
=1
n
[ p
1
p
2
x
i
−y
i
]⋅x
i
=0
Forma 1
∑
i
=1
n
[p
1
p
2
x
i
−y
i
]=0
∑
i
=1
n
[p
1
x
i
p
2
x
i
2
−y
i
x
i
]=0
Forma 2
p
1
n
p
2
∑
i
=1
n
x
i
=
∑
i
=1
n
y
i
p
1
∑
i
=1
n
x
i
p
2
∑
i
=1
n
x
i
2
=
∑
i
=1
n
y
i
x
i
Forma 3
[
n
∑
i
=1
n
x
i
∑
i
=1
n
x
i
∑
i
=1
n
x
i
2
]
⋅
[
p
1
p
2
]
=
[
∑
i
=1
n
y
i
∑
i
=1
n
y
i
x
i
]
X
⋅P=Y ⇒ P=X
−1
⋅Y
Przypadek dla trzech punktów aproksymacji
y
=p
1
p
2
x
p
3
1
x
S
p
1
, p
2
, p
3
=
∑
i
=1
n
[p
1
p
2
x
i
p
3
1
x
i
−y
i
]
2
=min
∂S p
1
, p
2
, p
3
∂ p
1
=2
∑
i
=1
n
[p
1
p
2
x
i
p
3
1
x
i
−y
i
]=0
∂S p
1
, p
2
, p
3
∂ p
2
=2
∑
i
=1
n
[p
1
p
2
x
i
p
3
1
x
i
−y
i
]⋅x
i
=0
∂S p
1
, p
2
, p
3
∂ p
3
=2
∑
i
=1
n
[ p
1
p
2
x
i
p
3
1
x
−y
i
]⋅
1
x
i
=0
[
n
∑
i
=1
n
x
i
∑
i
=1
n
1
x
i
∑
i
=1
n
x
i
∑
i
=1
n
x
i
2
n
∑
i
=1
n
1
x
i
n
∑
i
=1
n
1
x
i
2
]
⋅
[
p
1
p
2
p
3
]
=
[
∑
i
=1
n
y
1
∑
i
=1
n
x
i
y
i
∑
i
=1
n
1
x
i
y
i
]
X
⋅P=Y⇒ P=X
−1
⋅Y
13.Aproksymacja Funkcji dwóch zmiennych -
Dany jest zbiór punktów
x
1,
y
1,
z
1
,x
2,
y
2,
z
2
, ... ,x
n
, y
n
, z
n
Aproksymacją tego zbioru punktów ma być funkcja liniowa, np.:
z=Fx , y , p
1,
p
2,
p
3
=p
1
p
2
x
p
3
y
S
p
1,
p
2,
p
3
=
∑
i
=1
n
p
1
p
2
x
i
p
3
y
i
−z
i
2
=min
∂S
∂ p
1
=2
∑
i
=1
n
p
1
p
2
x
i
p
3
y
i
−z
i
=0
∂S
∂ p
1
=2
∑
i
=1
n
p
1
p
2
x
i
p
3
y
i
−z
i
x
i
=0
∂S
∂ p
1
=2
∑
i
=1
n
p
1
p
2
x
i
p
3
y
i
−z
i
y
i
=0
[
n
∑
i
=1
n
x
i
∑
i
=1
n
y
i
∑
i
=1
n
x
i
∑
i
=1
n
x
i
2
∑
i
=1
n
x
i
y
i
∑
i
=1
n
y
i
∑
i
=1
n
x
i
y
i
∑
i
=1
n
y
i
2
]
⋅
[
p
1
p
2
p
3
]
=
[
∑
i
=1
n
z
i
∑
i
=1
n
z
i
x
i
∑
i
=1
n
z
i
y
i
]
P
=X
−1
⋅Y
14.Interpolacja – Jej zadaniem jest wyznaczenie przybliżonych wartości funkcji w punktach nie będących węzłami oraz
oszacowanie błędu tych przybliżonych wartości.
Dana jest funkcja
y
=f x , x ∈[x
0
, x
n
]
dla której znamy tablicę jej wartości.
f
x
0
=y
0
, f
x
1
=y
1
, ..., f
x
n
=y
n
oraz n+1 węzłów interpolacji:
x
0
, y
0
,x
1
, y
1
, ..., x
i
, y
i
, x
n
, y
n
Należy wyznaczyć funkcję W(x) tak aby:
W
x
0
=y
0
, W
x
1
=y
1
, ..., W
x
n
=y
n
15.Węzeł interpolacji – Jest to jeden z punktów na bazie których została wyznaczona funkcja interpolująca i którego
wartość musi być dokładnie osiągnięta przez funkcję interpolującą.
16.Funkcja interpolująca – jest to taka funkcja, która w węzłach interpolacji przyjmuje takie same wartości co funkcja
y=f(x)

17.Wielomian uogólniony – Metoda doboru funkcji W(x) w postaci kombinacji liniowej n+1 funkcji bazowych
0
x ,
1
x ,... ,
n
x
W
x=
∑
i
=0
n
a
i
i
x = x⋅A
X
=
[
0
x
0
1
x
0
......
n
x
0
0
x
1
1
x
1
......
n
x
1
......
......
......
......
0
x
n
1
x
n
......
n
x
n
]
Y
=
[
y
0
y
1
...
y
n
]
I jeżeli macierz X nie jest osobliwa
A
=X
−1
⋅Y
Więc
W
x=x ⋅X
−1
⋅Y
18.Macierz bazowa -
=[
0
x ,
1
x ,... ,
n
x ]
19.Wektor współczynników -
A
T
=[a
0
, a
1
, ... ,a
n
]
20.Interpolacja wielomianowa (wielomian w postaci naturalnej) – Funkcję bazową przyjmuje się w postaci
jednomianów:
0
x=1,
1
x=x ,
2
x=x
2
, ...,
n
x=x
n
Warunkiem jest:
{
a
0
a
1
x
0
...a
n
x
0
n
=y
0
a
0
a
1
x
1
...a
n
x
1
n
=y
1
.....................................
a
0
a
1
x
n
...a
n
x
n
n
=y
n
Ponadto kolejne wartości
x
0
, x
1
,... , x
n
muszą się różnić między sobą oraz wyznacznik główny układu musi być różny
od 0
∣X∣=detX=
[
1
x
0
....
x
0
n
1
x
1
....
x
1
n
.... ....
.... ....
1
x
n
....
x
n
n
]
=
∏
i
j
x
i
−x
j
≠0
Przykład
Wyznaczyć wielomian w postaci naturalnej dla węzłów:
0,6,1,4, 2,12
Więęęęc:
x
=
[
0
1
2
]
y
=
[
6
4
12
]
X
=
[
x
0
0
x
0
1
x
0
2
x
1
0
x
1
1
x
1
2
x
2
0
x
2
1
x
2
2
]
=
[
1
0
0
1
1
1
1
2
4
]
Zaś z ciekawości:
A
=X
−1
⋅Y=
[
6
−7
5
]
W
s =a
0
a
1
s
a
2
s
2
=6−7s5s
2
21.Macierz Lagrange'a – Macierz
X
−1
dla bazy wielomianowej.
22.Interpolacja Lagrange'a -
Funkcja bazowa:
{
0
x = x−x
1
x−x
2
x−x
3
... x−x
n
1
x = x−x
0
x−x
2
x−x
3
... x−x
n
.....................................
i
x=x−x
0
...x−x
i
−1
x−x
i
1
...x
i
−x
n
.....................................
n
x = x−x
0
x−x
1
x−x
2
... x−x
n
−1
Współczynniki:
X
=
[
0
x
0
0
......
0
0
1
x
1
......
0
......
......
......
......
0
0
......
n
x
n
]
,
{
a
0
=
y
0
0
x
0
a
1
=
y
1
1
x
1
...
a
n
=
y
n
n
x
n
Toteż
W
x=a
0
0
x a
1
1
x...a
n
n
x
W
x=
∑
i
=0
n
y
i
x−x
0
...x−x
i
−1
x−x
i
1
...x−x
n
x
i
−x
0
...x
i
−x
i
−1
x
i
−x
i
1
...x
i
−x
n
Lub można się wycwanić:
W
x=
∑
i
=0
n
∏
j
≠i
x−x
j
∏
j
≠i
x
i
−x
j
, j
=0,1 ,... , n
Dla mathcada:
W
s =
∑
i
=0
n
−1
∏
j
=0
n
−1
if
j=i,1 ,
s
−x
j
x
i
−x
j
Przykład Zinterpoluj wielomian Lagrange'a dla węzłów
0,4,1,2, 2.5 ,2.75
W
s =4
s−1s−2.5
0−10−2.5
2
s−0s−2.5
1−01−2.5
2.75
s−0s−1
2.5−02.5−1
W
s =s
2
−3s4
23.Symbol Newtona – Funkcja dwóch argumentów całkowitych nieujemnych o postaci
n
k
=
n !
k !
n−k !
czytana
jako n po k
24.Różnice skończone– Dla funkcji stabelaryzowanych przy stałym kroku
h
=x
i
1
−x
i
wprowadza się pojęcie różnicy
skończonej rzędu k
y
i
=y
i
1
−y
i
2
y
i
=[ y
i
]= y
i
1
− y
i
=y
i
2
−2y
i
1
y
i
.....................
k
y
i
=[
k
−1
y
i
]=
k
−1
y
i
1
−
k
−1
y
i
=
=
∑
j
=0
k
−1
j
k
j
y
i
k− j
Na podstawie wzoru wartości funkcji
y
i
=f x
i
x
i
1
−x
i
=h=const
budujemy tablicę różnic skończonych o
strukturze podobnej do trójkąta Pascala
nr
x
y
y
2
y
3
y
0
x
0
y
0
y
0
2
y
0
3
y
0
1
x
1
y
1
y
1
2
y
1
...
2
x
2
y
2
y
2
...
...
3
x
3
y
3
...
...
...
...
...
...
...
...
3
y
n
−3
...
...
...
...
2
y
n
−2
...
...
...
y
n
−1
n
x
n
y
n
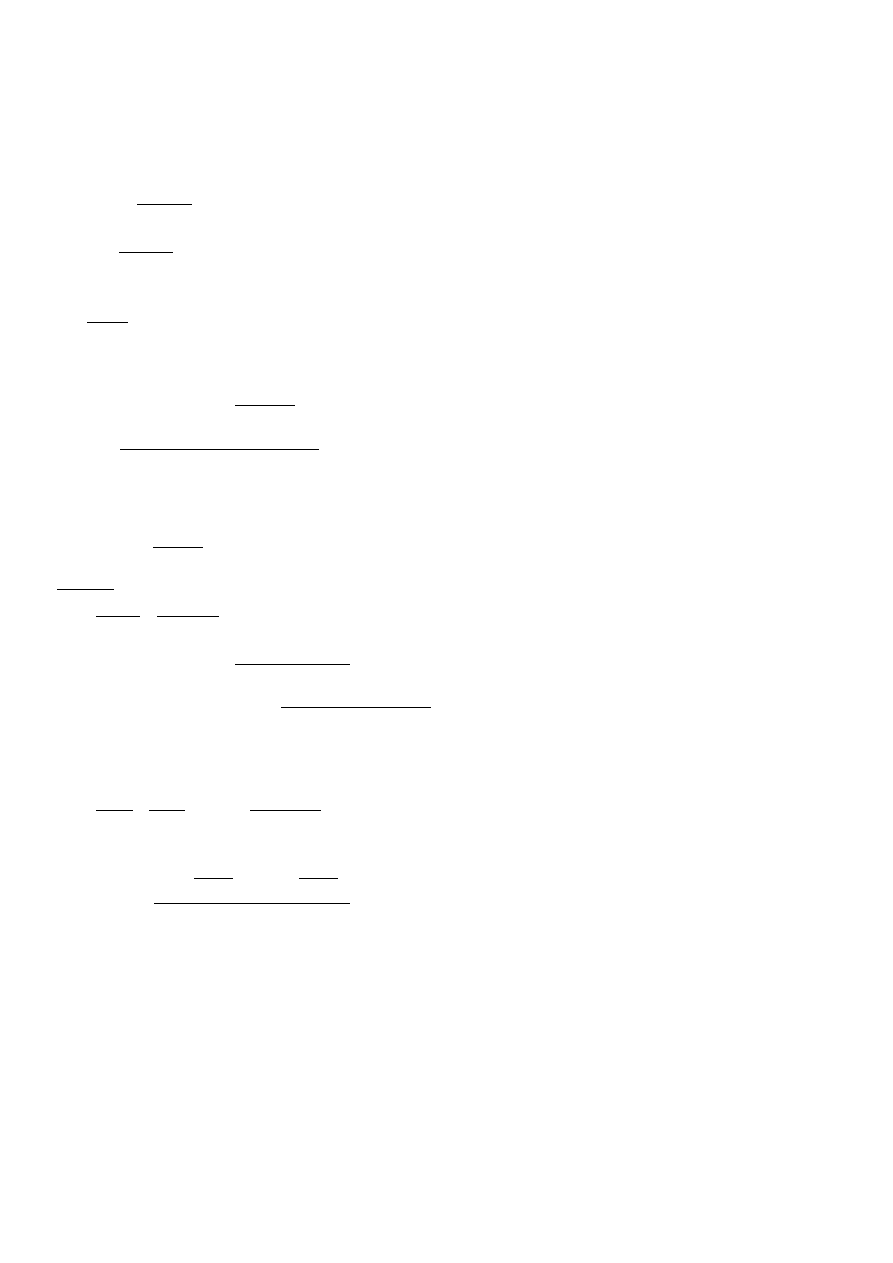
Przykład:
Dla podanych więzów zbudować tablicę różnic skończonych
0.2 ,0.259 ,0.4 ,0 .364,0.6 ,0 .448,0.8 ,0 .517,
1,0.577 ,1.2,0 .631
nr
x
y
y
2
y
3
y
4
y
5
y
0
0.2
0.259
0.105
-0.021
0.006
0
-0.003
1
0.4
0.364
0.084
-0.015
0.006
-0.003
2
0.6
0.448
0.069
-0.009
0.003
3
0.8
0.517
0.06
-0.006
4
1
0.577
0.054
5
1.2
0.631
25.Własności różnic skończonych -
y
=C ⇒ y=0
y
=C⋅f x ⇒C⋅ f x
y
∑
k
f
k
x ⇒ y=C f
k
x
y
=x
n
⇒ y=xh
n
−x
n
=nhx
n
−1
...h
n
y
=a
0
a
1
x
...a
n
x
n
⇒ y=b
0
b
1
x
...b
n
−1
x
n
−1
Jeżeli wielomian jest stopnia n, to różnica skończona rzędu n ten funkcji jest stała, a kolejne zerami. Prawdziwe jest
również twierdzenie odwrotne.
26.Interpolacja argumentów równoodległych w przód– Dla zbioru n+1 więzów
x
0
, x
1
=x
0
h , x
2
=x
0
2h ,... , x
n
=x
0
nh
oraz wartości funkcji
f
x
0
=y
0
, f
x
1
=y
1
, ..., f
x
n
=y
n
Mamy Wielomian interopolacyjny :
W
x=a
0
a
1
q
x a
2
q
x q x−1
a
3
q
xq x −1 q x−2...
a
n
q
x q x−1q x−2 ...q x −n1
q
x=
x
−x
0
h
Przy czym:
q
x
0
=0
q
x
1
=1
...
q
x
n
=n
Funkcje bazowe:
0
x =1
1
x=q x
2
x=q xq x−1
3
x=q xq x−1q x−2
......
n
x=q xq x−1q x −2... q x −n1
Układ równań do wyznaczenia współczynników:
X
⋅A=Y
X
=
[
1
0
0
0
...
0
1
1
0
0
...
0
1
2
2
0
...
0
1
3
6
6
...
0
...
...
...
...
...
...
1
n
n
n−1 n n−1 n−2 ... n !
]
A
=
[
a
0
a
1
...
a
n
]
Y
=
[
y
0
y
1
...
y
n
]
A
=X
−1
⋅Y

a
0
=y
0
a
1
= y
0
⇔
y
1
=a
0
a
1
a
2
=
2
y
0
2!
⇔ y
2
=a
0
2a
1
2a
2
a
3
=
3
y
0
3!
⇔ y
3
=a
0
3a
1
6a
2
6a
3
....
a
n
=
n
y
0
n !
⇔ y
n
=a
0
na
1
n n−1 a
2
...n ! a
n
27.Pierwszy wzór interpolacyjny Newtona – interpolacja wprzód
W
x=y
0
q y
0
q
q−1
2 !
2
y
0
...
q
q−1 q−2... q−n1
n !
n
y
0
W
x=
∑
i
=0
n
a
i
⋅
i
x=
∑
i
=0
n
i
y
0
i !
⋅
∏
j
=0
i
if
j=0,1, q− j1
Przykład1: Znajdź wielomian interpolacyjny z dokładnością
3
dla
x
0
=0.4
i wylicz jego wartość w punkcie
x
=0.5
q
=
x
−x
0
h
=
x
−0.4
0.2
=5x−2
W
x=y
0
q y
0
q q−1
2
y
0
2!
q q−1q−2
3
y
0
3!
W
x=0.125 x
3
−0.0375 x
2
0.9175x0.038
W
0.5=0.418625
28.Interpolacja argumentów równoodległych w tył - Dla zbioru n+1 więzów
x
0
, x
1
=x
0
−h , x
2
=x
0
−2h ,... , x
n
=x
0
−nh
oraz wartości funkcji
f
x
0
=y
0
, f
x
1
=y
1
,... , f
x
n
=y
n
Mamy Wielomian interopolacyjny :
W
x=a
0
a
1
q
xa
2
q
xq x1
a
3
q
xq x1q x 2...
a
n
q
x q x 1 q x2...q xn−1
q
x=
x
−x
n
h
q
x
0
=−n
q
x
1
=−n1
q
x
2
=−n2
...
q
x
n
=0
Funkcje bazowe -
0
x =1
1
x=q x
2
x=q xq x1
3
x=q xq x1q x2
......
n
x=q xq x1q x 2... q x n−1
Układ równań do wyznaczenia współczynników:
X
=
[
1
−n −n 1−n −n 1−n 2−n ... n !⋅−1
n
...
...
...
...
...
...
1
−3
6
−6
...
0
1
−2
2
0
...
0
1
−1
0
0
...
0
1
0
0
0
...
0
]
A
=
[
a
0
a
1
...
a
n
]
Y
=
[
y
0
y
1
...
y
n
]
A
=X
−1
⋅Y
a
0
=y
n
a
1
= y
n
−1
⇔ y
n
−1
=a
0
a
1
a
2
=
2
y
n
−2
2 !
⇔ y
n
−2
=a
0
2a
1
2a
2
a
3
=
3
y
n
−3
3!
⇔ y
n
−3
=a
0
3a
1
6a
2
6a
3
....
a
n
=
n
y
0
n !
⇔ y
0
=a
0
na
1
n n−1 a
2
...n ! a
n
29.Drugi wzór interpolacyjny Newtona – interpolacja wstecz
W
x=y
n
q y
n
−1
q
q1
2 !
2
y
n
−2
...
q
q 1q 2... qn−1
n !
n
y
0
W
x=
∑
i
=0
n
a
i
⋅
i
x
W
x=
∑
i
=0
n
i
y
n
−i
i !
⋅
∏
j
=0
i
if
j=0,1 , q j−1
Przykład: Oblicz wartość w punkcie pośrednim tabeli dla
x
=1.1 , x
n
=1.2
q
=
x
−x
n
h
=
1.1
−1.2
0.2
=−0.5
W
x=y
n
q y
n
−1
q
q1
2
y
n
−2
2 !
W
1.1=0.631−0.5⋅0.054
−0.5⋅0.5⋅−0.006
2
W
1.1=0.60475
30.Interpolacja Czebyszewa -
Współrzędną
x
∈< a , b >
normalizujemy do
c
∈<−1,1 >
za pomocą wzoru:
x
=
a
b
2
b
−a
2
⋅c ⇒ c=
2x
−a−b
b
−a
Analogicznie postępujemy ze współrzędną y normalizując ją do h .
Następnie tworzymy bazę Czebyszewa z zależności:
T
0
c=1, T
1
c=c , T
j
c=2c⋅T
j
−2
c−T
j
−1
c
lub:
T
j
c =
c
c
2
−1
j
c−
c
2
−1
j
2
albo jeszcze fajniej:
T
j
c =cos j⋅arccosc
Na podstawie tego tworzymy układ równań o postaci T*A=H
[
T
0
c
0
T
1
c
0
.... T
n
c
0
T
0
c
1
T
1
c
1
.... T
n
c
1
....
....
....
....
T
0
c
n
T
1
c
n
.... T
n
c
n
]
⋅
[
A
0
A
1
....
A
n
]
=
[
h
0
h
1
....
h
n
]
Znormalizowany wielomian interpolujący przybierze postać:
W
c=
∑
j
=0
n
A
j
⋅T
j
c
Aby otrzymać rzeczywistą funkcję należy przebudować wielomian W(c) do postaci W(x).
W tym celu modyfikujemy układ równań
[
T
0
c
0
T
1
c
0
.... T
n
c
0
T
0
c
1
T
1
c
1
.... T
n
c
1
....
....
....
....
T
0
c
n
T
1
c
n
.... T
n
c
n
]
⋅
[
B
0
B
1
....
B
n
]
=
[
y
0
y
1
....
y
n
]
Zaś zaś za c podstawiamy wartość wyrażoną w x
Ostatecznie:
W
x=
∑
j
=0
n
B
i
⋅T
j
2x
−a−b
b
−a
Ponadto poprzez przyjęcie węzłów z zależności:
x
j
=cos
2j1
2n
2
, j
=0,1 ,... , n
oraz modyfikację pierwszego
punktu bazy
T
0
c=
1
2
upraszcza się wyznaczanie macierzy A i B.
A
B=
2
n
1
T
T
⋅H Y
Własność tą wykorzystujemy wpierw określając znormalizowane punkty, następnie przeliczając je na odpowiadające
im współrzędne w przyjętym przedziale, by ostatecznie zmierzyć w nich wartości funkcji.
31.Interpolacja trygonometryczna – Rozważmy funkcję o okresie
2
dla której znamy wartości w
2n
1
węzłach
x
j
∈< 0,2 >
Węzły te określamy z zależności:
x
j
=
2j
2n
1
, j
=0,1 ,... ,2 n
Rozpatrywana funkcja przybierze taką postać:
W
x=
A
0
2
A
1
sin1x
A
2
cos1x
...
A
2n
−1
sin
nxA
2n
cos
nx
lub krócej:
W
x=
A
0
2
∑
j
=1
n
A
2j
⋅cos j⋅x
∑
j
=1
n
A
2j
−1
⋅sin j⋅x
Współczynniki A wyznaczymy z układu: T*A=Y, gdzie:
T
=
[
1
2
0
1
...
0
1
1
2
sin x
1
cos x
1
...
sin
n⋅x
1
cos
n⋅x
1
1
2
sin x
2
cos x
2
...
sin
n⋅x
2
cos
n⋅x
2
...
...
...
...
...
...
1
2
sin x
2n
cos x
2n
... sin
n⋅x
2n
cos n⋅x
2n
]
Lub prościej z trzech równań:
T
0
x =
1
2
T
j
x=sin
j
1
2
⋅x
dla j
=1,3, ...,2 n−1
T
j
x =cos
j
2
⋅x
dla j
=2,4 , ...,2 n
A
=
[
A
0
A
1
...
A
2n
]
Y
=
[
y
0
y
1
...
y
2n
]
Przy czym należy pamiętać, że również:
A
=
2
2n
1
T
T
⋅Y
32.Kwadratury interpolacyjne – Mamy funkcję f(x) ciągłą i ograniczoną w przedziale <a,b>. Przedział ten dzielimy na
skończoną liczbę pod-przedziałów, wyróżniając na osi x zbiór punktów o stałym kroku
h
=x
i
1
−x
i
=
b
−a
n
=const
który przybierze postać siatki:
a
=x
0
x
1
x
2
...x
i
x
i
1
...x
n
=b
i=0,1,...,n
Wynika z tego, że:
∫
x
0
=a
x
n
=b
f
x dx=
∑
i
=0
n
−1
∫
x
i
x
i
1
f
x dx=
∑
i
=0
n
−1
i
Zaś po przybliżeniu wielomianem interpolacyjnym W(x) (np. Newtona 1)
i
=
∫
x
i
x
i
1
f
x dx≈
∫
x
i
x
i
1
W
x dx
33.Całkowanie metodą prostokątów – Bardzo przyjemne i relaksujące dopóki nie trzeba go robić ręcznie. Przyjmijmy, że
n o wartościach poniżej 1000 dla nas nie istnieje.
W
x=y
i
, x
∈< x
i
, x
i
1
>
i
=
∫
x
i
x
i
1
y
i
dx
=h
∫
0
1
y
i
dq
=h⋅y
i
Z 'niedomiarem'
∫
a
b
f
x dx=h
∑
i
=0
n
−1
y
i
=w
Z 'nadmiarem'
∫
a
b
f
x dx=h
∑
i
=1
n
y
i
=W
Punkty przygotowujemy tak:
x
i
=ah⋅i
y
i
=f x
i
Interesujące wyniki można uzyskać poprzez wyliczenie średniej
W
w
2
Bardzo interesujące.
34.Całkowanie metodą trapezów -
W
x=y
i
q⋅ y
i
, x
∈< x
i
, x
i
1
>
i
=
∫
x
i
x
i
1
W
x dx=
∫
x
i
x
i
1
y
i
q⋅ y
i
dx
=
1
2
h
y
i
y
i
1
Z 'niedomiarem'
∫
a
b
f
x dx=h
∑
i
=0
n
−1
y
i
y
i
1
2
=
=h
[
∑
i
=1
n
−1
y
i
y
0
y
n
2
]
=h
[
∑
i
=0
n
y
i
−
y
0
y
n
2
]
Z 'nadmiarem'
∫
a
b
f
x dx=h
∑
i
=1
n
y
i
y
i
−1
2
Tym razem wyliczanie średniej nie da już tak spektakularnych efektów, nie mamy nawet pewności czy rzeczywiście
jedna z funkcji będzie miała wartość mniejszą od rzeczywistej, a druga większą. Nie róbmy więc tego. Liczymy
pierwszym wzorkiem.
35.Kwadratury Gaussa – mamy funkcję f(x) rozpatrywaną i ciągłą w przedziale <a,b>.
Postać całki tej funkcji po danym obszarze normalizujemy
∫
a
b
f
x dx ⇒
∫
−1
1
F
d
,gdzie:
x
=
a
b
2
b
−a
2
⇒ =
2x
−a −b
b
−a
dx
=
b
−a
2
d
⇒ d =
2dx
b
−a
∫
−1
1
F
d =
b
−a
2
∫
−1
1
f
a
b
2
b
−a
2
d
F
=
b
−a
2
⋅f
a
b
2
b
−a
2
Następnie tą znormalizowaną postać przybliżamy wielomianem:
F
=a
0
a
1
a
2
2
...a
2n
−1
2n
−1
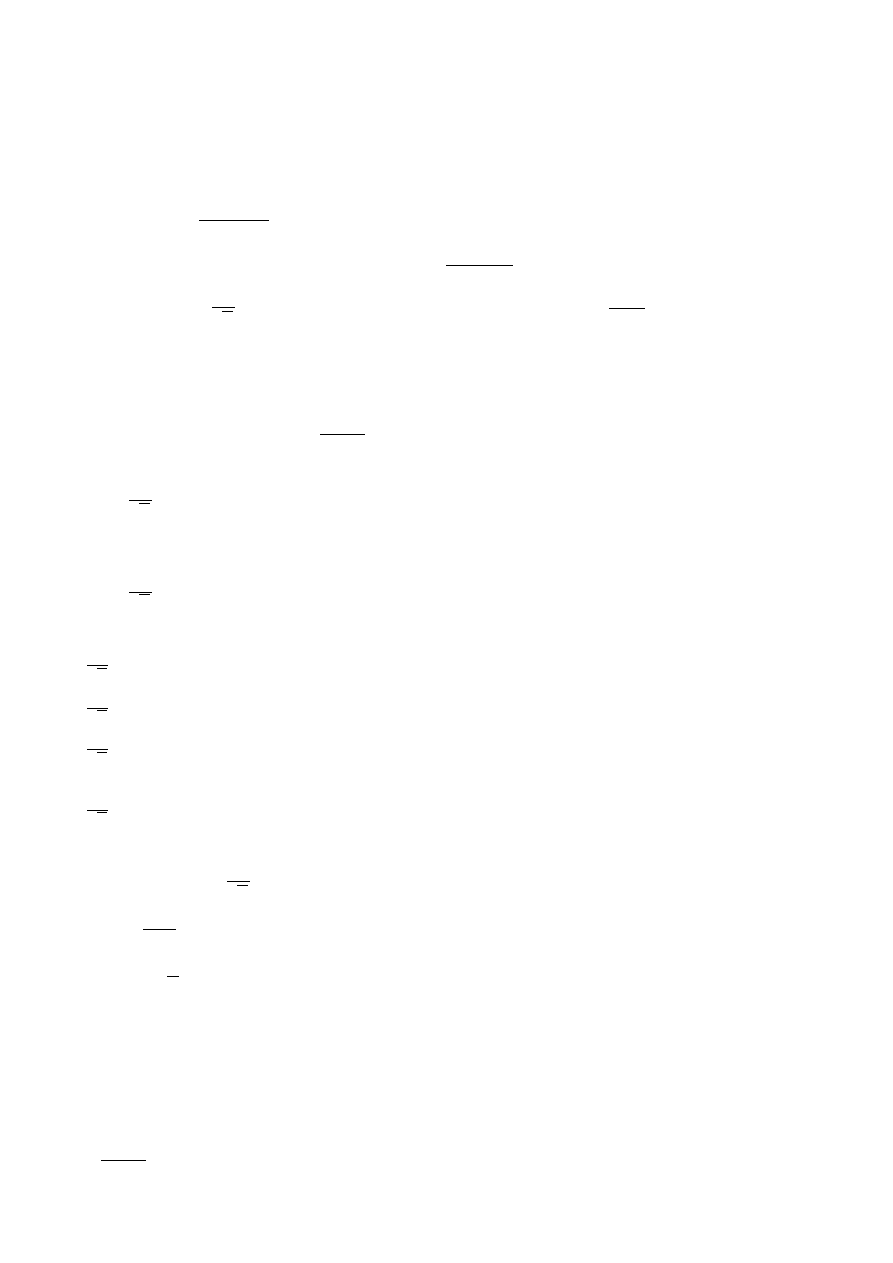
∫
−1
1
F
d ≈
∑
i
=1
n
F
i
w
i
,gdzie:
∈<−1,1 >
odcięte punktów Gaussa
w
i
współczynniki wagowe
n
ilość punktów Gaussa
n
i
w
i
2
-0.57735
0.57735
1
1
3
-0.7746
0
0.7746
0.(5)
0.(8)
0.(5)
36. Całka podwójna po trójkącie (Kubatury Gaussa) – Dana jest funkcja dwóch zmiennych f(x,y) ciągła i ograniczona w
obszarze trójkątnym D wyznaczonym przez nieleżące na jednej prostej wierzchołki trójkąta D:
x
1,
y
1
; x
2,
y
2
; x
3,
y
3
Celem jest policzenie wyrażenia
∬
D
f
x , y dxdy
Normalizujemy w tym celu całkę sprowadzając trójkąt D do trójkąta jednostkowego prostokątnego o wierzchołkach
x
1,
y
1
0,0
x
2,
y
2
1,0
x
3,
y
3
0,1
przez podstawienie
x
=x
1
x
2
−x
1
⋅x
3
−x
1
⋅
y
=y
1
y
2
−y
1
⋅ y
3
−y
1
⋅
Wraz ze zmianą okładu współrzędnych należy funkcję podcałkową wymnożyć przez jakobian przekształcenia
J
=
∣
dx
d
dx
d
dy
d
dy
d
∣
=
∣
x
2
−x
1
x
3
−x
1
y
2
−y
1
y
3
−y
1
∣
∣J∣=2⋅∣D∣
gdzie:
|D| - pole wyjściowego trójkąta D
Postać funkcji podcałkowej
F
,=∣J∣⋅f [ x
1
x
2
−x
1
x
3
−x
1
,
y
1
y
2
−y
1
y
3
−y
1
]
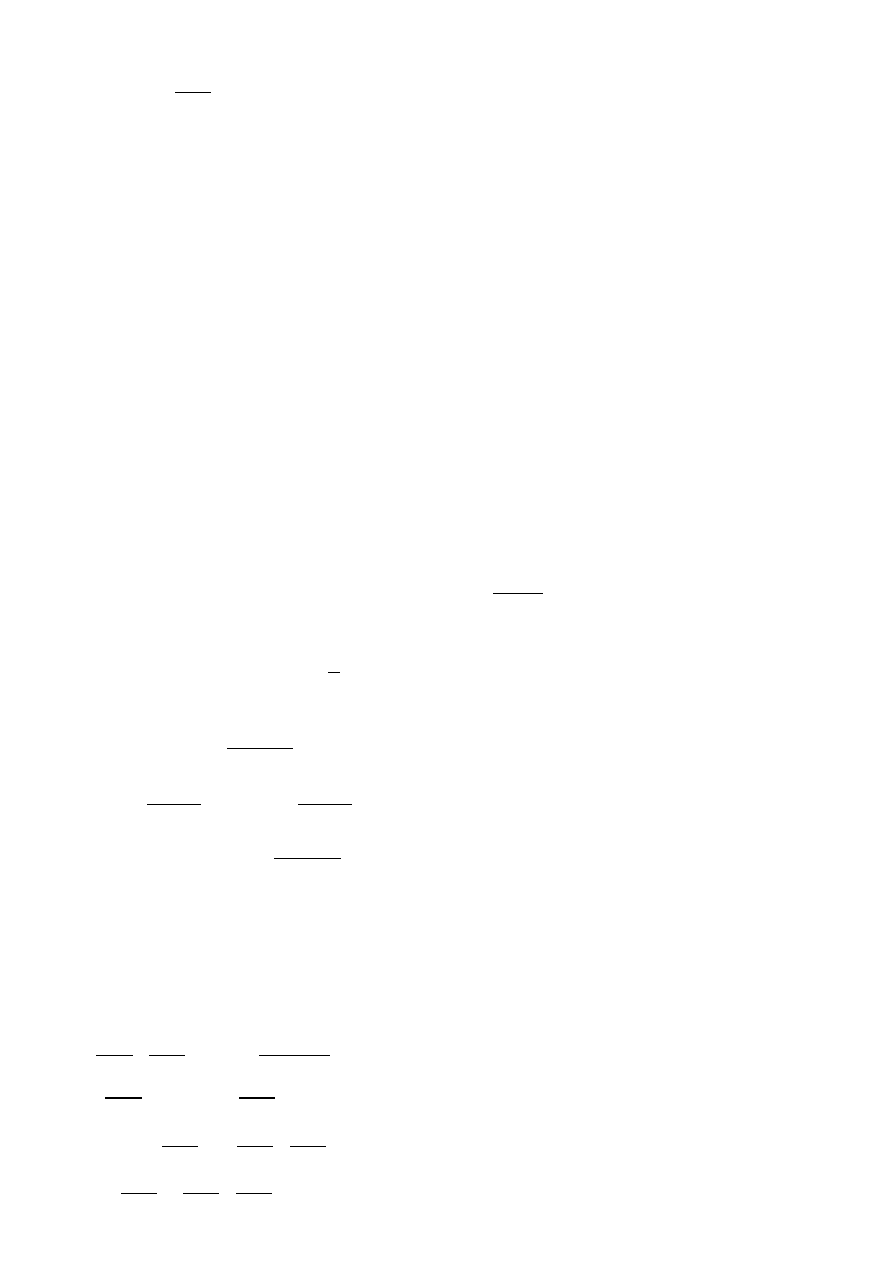
Postać końcowa
∫
0
1
∫
0
1
−
F
, d ≈
1
2
∑
i
=1
n
F
i
,
i
w
i
i
,
i
- współrzędne punktów Gaussa
w
i
- wagi punktów Gaussa
n
- liczba punktów Gaussa
Wartości te odczytujemy z tablic:
n
i
i
w
i
1 - liniowa
1/3
1/3
1
3 - kwadratowa
0.5
0
0.5
0.5
0.5
0
1/3
1/3
1/3
37.Przybliżone metody rozwiązywania równań – Polegają na tworzeniu wzorów rekurencyjnych określających sposób
wyznaczenia kolejnych wyrazów ciągu liczbowego, którego granicą jest szukane rozwiązanie równania F(x)=0.
Podstawowe problemy:
~Lokalizacja pierwiastka (dobór punktu startowego)
~Obliczanie przybliżeń pierwiastków
~Zbieżność procesu iteracyjnego
Popularne metody:
~Bisekcji
~Cięciw
~Stycznych
38.Twierdzenia o lokalizacji pierwiastków:
Pierwsze - Bolzano-Cauchy'ego – Jeżeli funkcja F(x) jest ciągła w przedziale <a,b> i na jego końcach przyjmuje wartości
różnych znaków tzn.
F
a⋅F b0
, to między punktami a i b znajduje się co najmniej jeden pierwiastek równania
F(x)=0.
Drugie – Jeżeli w przedziale <a,b> spełnione są założenia twierdzenia Bolzano-Cauchy'ego i dodatkowo pierwsza
pochodna F(x) jest stałego znaku w tym przedziale (funkcja stale rosnąca lub malejąca) to przedział ten jest
przedziałem izolacji pierwiastków równania F(x)=0, co znaczy, że w tym przedziale jest tylko jeden pierwiastek.
Trzecie – Jeżeli
F
x=a
n
x
n
a
n
−1
x
n
−1
...a
1
x
a
0
, a
n
≠0
to pierwiastki równania F(x)=0 są zawarte w
przedziale
∣x∣1
M
∣a
n
∣
, gdzie
M
=max {∣a
0
∣, ∣a
1
∣,... , ∣a
n
−1
∣}
39.Metoda bisekcji – Niech <a,b> będzie przedziałem izolacji pierwiastków równania F(x)=0. Jako dwa pierwsze wyrazy
ciągu przybliżeń przyjmujemy:
x
1
=a ,
x
2
=b
Kolejne przybliżenia przyjmujemy według wzoru:
x
i
=
x
i
−1
x
k
2
, k
∈< 1,i−2, i2
∣x
i
−x
i
−1
∣≈∣x
i
−x
k
∣, Fx
i
−1
⋅F x
k
0
Metoda jest zbieżna, gdyż przybliżenia znajdują się każdorazowo w przedziałach izolacji.
∣x
i
1
−x
i
∣∣x
i
−x
i
−1
∣
Zaletą jest prostota, wadą wolna zbieżność procesu iteracyjnego.
40.Metoda cięciw – Jeżeli funkcja F(x) jest funkcją klasy
C
2
w przedziale izolacji pierwiastka, to rozwiązanie równania
F(x)=0 przybliżamy ciągiem miejsc zerowych cięciw poprowadzonych między punktami stanowiącymi końce kolejnych
przedziałów izolacji.
Równanie Cięciw
y
−F x
i
−1
F
x
k
−F x
i
−1
=
x
−x
i
−1
x
k
−x
i
−1
, gdzie
x
k
jest drugim krańcem przedziału izolacji
x
i
−1
, x
k
Pierwszą cięciwę prowadzimy między punktami:
a , F a, b , F b
Dla
y
=0
x
i
=x
i
−1
−F x
i
−1
⋅
x
k
−x
i
−1
F
x
k
−Fx
i
−1
Punkt kontrolny
z
=
a
b
2
będziemy go używać do sprawdzani wartości
Określanie stałego punktu pęku cięciw
x
∈a , b, F ' x⋅F ' ' x0 x
k
=x
2
=b
x
∈a , b, F ' x⋅F ' 'x 0 x
k
=x
1
=a
Metoda ta jest zawsze zbieżna i to szybciej niż bisekcji.
41.Metoda stycznych Newtona – Przybliżamy F(x)=0 w przedziale izolacji <a,b> wyrazami ciągu utworzonego przez
miejsca zerowe stycznych do funkcji F(x).
Równanie stycznej w punkcie o odcietej
x
i
−1
y
−f x
i
−1
=F 'x
i
−1
⋅ x−x
i
−1
Dla
y=0
x
i
=x
i
−1
−
F
x
i
−1
F '
x
i
−1
, i
1
Wybór pierwszego przybliżenia
x
1
x
∈a , b, F' x⋅F '' x0 x
1
=b
x
∈a , b, F 'x ⋅F ' 'x 0 x
1
=a
Jeżeli druga pochodna nie ma stałego znaku to proces iteracyjny może być rozbieżny.
42.Równania różniczkowe zwyczajne – przybliżone rozwiązywanie
Sposoby rozwiązywania
Szeregi -
~współczynników nieoznaczonych
~kolejnego różniczkowania (metoda jednego punktu)
~kolejnych przybliżeń Picarda
Dyskretne – Rozpatrujemy równanie różniczkowe rzędu pierwszego wraz z warunkiem początkowym
y '
=F x , y , y x
0
=y
0
Zakładamy, że F(x,y) jest ciągła oraz ograniczona w pewnym obszarze płaskim
, w
którym spełnia warunek Cauchy'ego-Lipschitza względem y, tzn. istnieje taka liczba K, że dla wszystkich par punktów
P
1
x , y
2
, P
2
x , y
2
, P
1
, P
2
∈
spełniona jest nierówność
∣Fx , y
1
−F x , y
2
∣K y
1
−y
2
~łamanych Eulera
~ulepszenia metody Eulera
~wzory Rungego-Kutty
~metody wielokrokowe
43.Metoda łamanych Eulera – Polega na przybliżonym rozwiązaniu równania
y
x
i
1
=y
i
1
=y
i
∫
x
i
x
i
1
F
[x , y x]dx
Funkcję F(x,y) traktujemy na odcinku
[x
i
, x
i
1
]
jako stałą i równą wartości F w punkcie
x
i
, y
i
∫
x
i
x
i
1
F
[x , y x]dx=h
i
F
x
i
, y
i
, h
i
=x
i
1
−x
i
Ostatecznie otrzymujemy wzór rekurencyjny w postaci:
y
i
1
=y
i
h
i
F
x
i
, y
i
, h
i
=x
i
1
−x
i
, i
=1,2, ... , n
Pochodna y' została zastąpiona ilorazem różnicowym.
y
i
1
−y
i
h
i
czyli krzywą całkową na odcinku
[x
i
, x
i
1
]
aproksymuje się odcinkiem stycznej do niej,
przechodzącej przez punkt
x
i
, y
i
zwykle przyjmujemy
h
i
=const=h
44.Pierwsze ulepszenie metody łamanych – Styczna do łuku
A
x
i
, y
i
, Bx
i
1
, y
i
1
w punkcie o odciętej
x
*
= x
i
x
i
1
/2
jest równoległa do cięciwy AB.
Wzory:
x
*
=
1
2
x
i
x
i
1
y
*
=y
i
0.5⋅h⋅F x
i
, y
i
m
*
=F x
*
, y
*
y
i
1
=y
i
h⋅m
*
45.Drugie ulepszenie metody łamanych Eulera-Cauchy'ego – Współczynnik
kierunkowy siecznej AB jest średnią arytmetyczną współczynników
kierunkowych stycznych w punktach A i B.
Wzory:
x
*
=x
i
1
=x
i
h
y
*
=y
i
h⋅F x
i
, y
i
m
*
=F x
*
, y
*
y
i
1
=y
i
0.5⋅h [F x
i
, y
i
m
*
]
Wyszukiwarka
Podobne podstrony:
MN Esencja 1 id 304074
MN Esencja 1
MN Esencja 1
Podstawy MN 2007
Uczestnicy s mn
Wyklad mn 2
Wyklad mn 9
Bahuvedaniya Sutta-wiele rodzajów uczuć MN 2;59, Kanon pali -TEKST (różne zbiory)
Vitakkasanthana Sutta MN 20.Sutta o opanowaniu złych myśli, Kanon pali -TEKST (różne zbiory)
MN energetyka zadania od wykładowcy 09-05-14, STARE, Metody Numeryczne, Część wykładowa Sem IV
8 krokiew ugiecie mn, Budownictwo Politechnika Rzeszowska, Rok IV, Konstrukcje Drewniane, drewno mat
MN 3 Statystyczne własności błędów zaokrągleń
mn
Metody numeryczne PDF, MN macierze 01 1
MN 238 revII
więcej podobnych podstron