1. Metody numeryczne (analiza numeryczna) – Dział matematyki
stosowanej zajmujący się opracowaniem metod przybliżonego
rozwiązywania skomplikowanych zagadnień matematycznych, których
rozwiązanie byłoby nadzwyczaj żmudne lub niemożliwe choćby poprzez
konieczność wykonania nieskończenie wielu operacji.
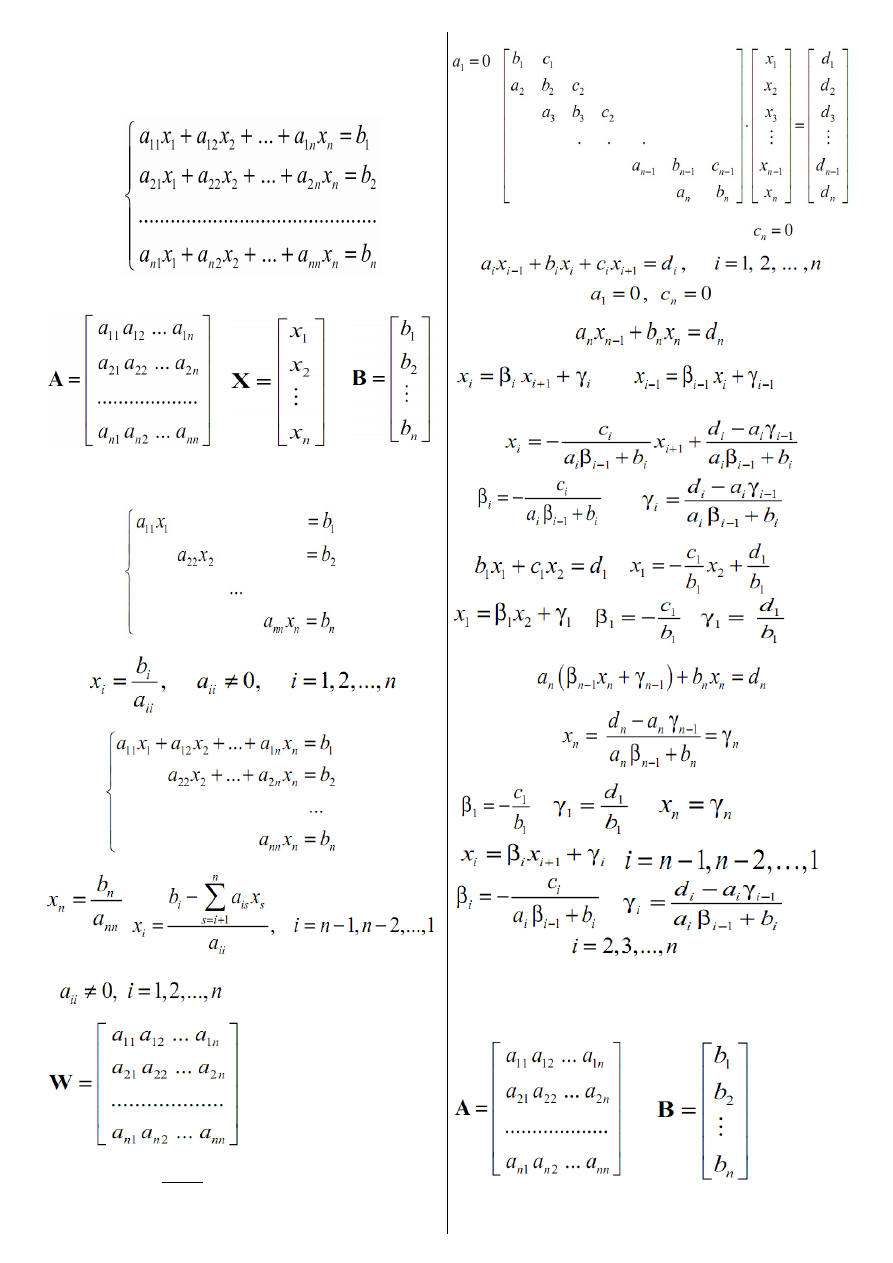
2. Układ równań zawierający n niewiadomych
3. Macierzowa reprezentacja układu n niewiadomych
A⋅X=B→ X=A
−
1
⋅
B
, gdzie
Układ równań posiada jedno rozwiązanie tylko wtedy gdy jest oznaczony,
tzn. macierz główna układu równań A nie jest osobliwa.
4. Układ równań, w którym tylko główna przekątna macierzy A ma
elementy niezerowe
Algorytm:
5. Trójkątny układ równań
Algorytm:
Przy czym:
6. Metoda Cramera (Wyznacznikowa)
Algorytm:
xn=
[
Wn]
[
W ]
, |W| != 0
b podstawiamy w kolumnę odpowiednią liczonemu ixowi
7. Metoda Thomasa dla układów trójprzekątniowych:
Algorytm:
Stąd:
Zapisując inaczej:
Po podstawieniu:
Wyznaczamy wartości początkowe:
Łączymy drugi algorytm z czwartym
Stąd:
Ostatecznie: !!!!!!!!!
8. Metoda eliminacji Gaussa: Jest to metoda służąca jedynie do
upraszczania układów. Jej celem jest sprowadzenie n pierwszych
kolumn macierzy C do macierzy trójkątnej. Następnie pozostaje już tylko
rozwiązanie macierzy trójkątnej.
Mamy:
Następnie zapisujemy to w postaci macierzy C, w której macierz główną
uzupełnia się dodatkową kolumną zawierającą wektor wyrazów wolnych
B.
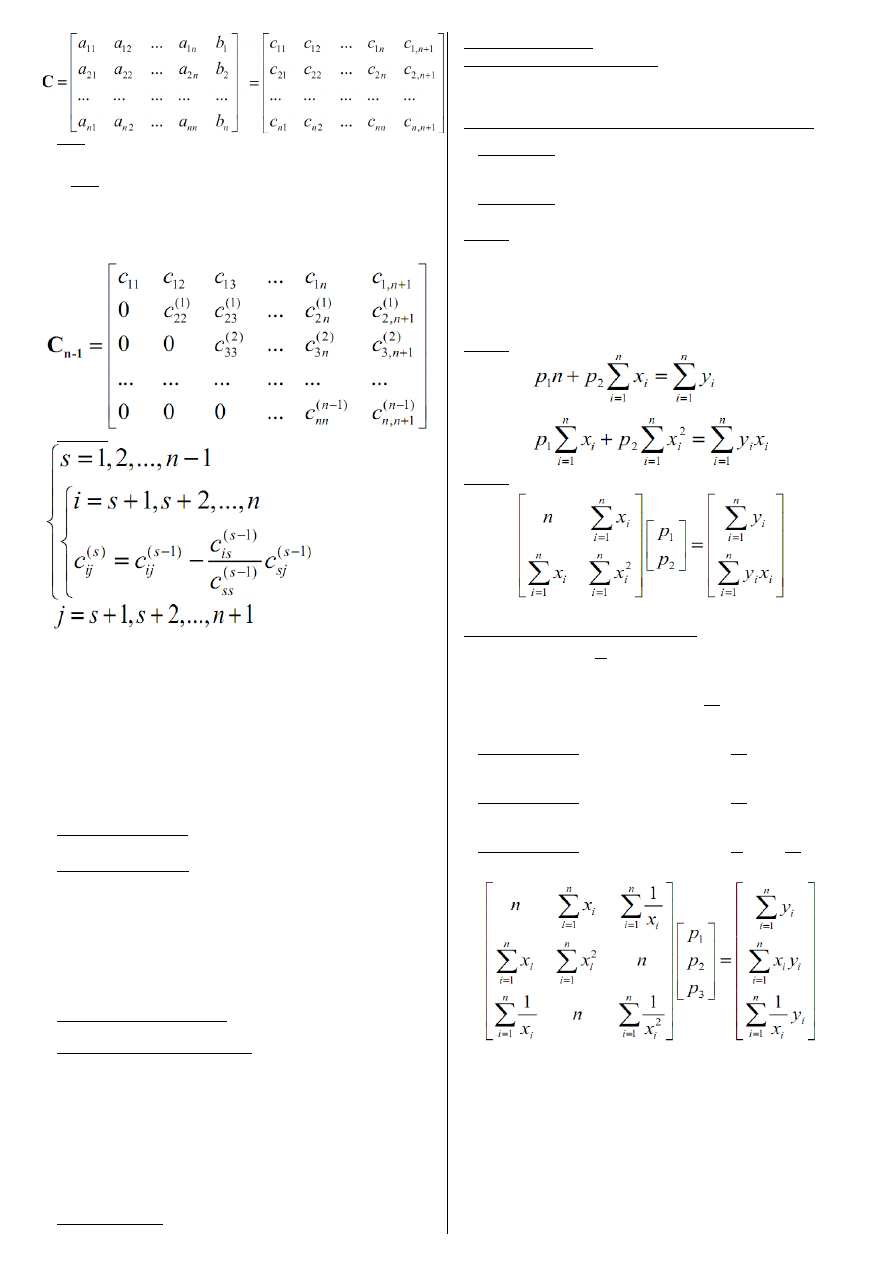
Kroki
Jeżeli
c11≠0
Odejmujemy pierwsze równanie pomnożone przez
ci1
c11
od każdego kolejnego i-tego równania, przy czym:
i=
2,3
,
...
,n
zaś obliczone współczynniki zapisujemy w miejscu
poprzednich. Następnie przeprowadzamy analogiczne operacje aż do
uzyskania macierzy trójkątnej. Po n-1 krokach mamy:
Algorytm:
9. Aproksymacja funkcji jednej zmiennej – Dana jest funkcja jednej
zmiennej
y=f x , x ∈[a , b]
Należy dobrać taką funkcję
F x , p
1
, ... , p
k
, x ∈[a , b]
aby możliwie jak najdokładniej
odtworzyć przebieg funkcji f(x), czyli zminimalizować różnice pomiędzy
odpowiednimi wartościami w punktach
x
i
, y
i
, i=1,2, ..., n
Gdzie:
p
1
, ..., p
k
To parametry wzoru empirycznego.
Aproksymacja polega na dobraniu parametrów
p
1
, ... , p
k
wzoru
empirycznego w taki sposób aby pełnione było kryterium minimalizacji
odchyłek.
Rodzaje aproksymacji:
Aproksymacja punktowa – funkcja f(x) jest zadana jako zbiór punktów
f x
1
=
y
1
, f x
2
=
y
2,
... , f x
n
=
y
n
Aproksymacja integralna - unkcja f(x) jest zadana w formie wzoru
analitycznego
10.Odchyłka -
i
=
F x
i
, p
1
, ... , p
k
−
y
i
11.Kryteria minimalizacji odchyłek:
~wybranych punktów
~średnich
~sumowania bezwzględnych wartości
~najmniejszych kwadratów
12.Metoda najmniejszych kwadratów -
Dobór współczynników funkcji
F
∑
i=1
n
i
2
=
min
Kryterium najmniejszych kwadratów
∑
i=1
n
[
F x
i
, p
1
,... , p
k
−
y
i
]
2
=
min
Zalety:
~kryterium jest mocne, zawiera kwadraty odchyłek, a więc liczby
nieujemne
~Prostota obliczeń minimum funkcji pod warunkiem, że rozpatruje się
aproksymację w klasie wielomianów uogólnionych:
F x , p
1
, ... , p
k
=
p
1
1
x p
2
2
x...p
k
k
x
13.Aproksymacja liniowa funkcji jednej zmiennej -
Dany zbiór punktów
x
1
, y
1
, x
2
, y
2
, ..., x
n
, y
n
Funkcja aproksymująca
y=p
1
p
2
x
Kryterium najmniejszych kwadratów
S p
1
, p
2
=
∑
i=1
n
[
p
1
p
2
x
i
−
y
i
]
2
=
min
Warunek konieczny istnienia ekstremum funkcji dwóch zmiennych
∂
S p
1
, p
2
∂
p
1
=
2
∑
i=1
n
[
p
1
p
2
x
i
−
y
i
]=
0
∂
S p
1
, p
2
∂
p
2
=
2
∑
i=1
n
[
p
1
p
2
x
i
−
y
i
]⋅
x
i
=
0
Forma 1
∑
i=1
n
[
p
1
p
2
x
i
−
y
i
]=
0
∑
i=1
n
[
p
1
x
i
p
2
x
i
2
−
y
i
x
i
]=
0
Forma 2
Forma 3
X⋅P=Y ⇒ P=X
−
1
⋅
Y
Przypadek dla trzech punktów aproksymacji
y=p
1
p
2
xp
3
1
x
S p
1
, p
2
, p
3
=
∑
i=1
n
[
p
1
p
2
x
i
p
3
1
x
i
−
y
i
]
2
=
min
∂
S p
1
, p
2
, p
3
∂
p
1
=
2
∑
i=1
n
[
p
1
p
2
x
i
p
3
1
x
i
−
y
i
]=
0
∂
S p
1
, p
2
, p
3
∂
p
2
=
2
∑
i=1
n
[
p
1
p
2
x
i
p
3
1
x
i
−
y
i
]⋅
x
i
=
0
∂
S p
1
, p
2
, p
3
∂
p
3
=
2
∑
i=1
n
[
p
1
p
2
x
i
p
3
1
x
−
y
i
]⋅
1
x
i
=
0
X⋅P=Y ⇒ P=X
−
1
⋅
Y
Wyszukiwarka
Podobne podstrony:
MN Esencja 1
MN wyklad id 304106 Nieznany
MN rozdz 2 id 286501 Nieznany
MN rozdz 3 id 286502 Nieznany
MN Esencja 1
MN Esencja 1
MN I id 304086 Nieznany
MN id 304064 Nieznany
Antysemityzm w MN id 66622 Nieznany
CHWY MOJ RK I ID ZA MN
13 ZMIANY WSTECZNE (2)id 14517 ppt
!!! ETAPY CYKLU PROJEKTU !!!id 455 ppt
Podstawy MN 2007
2 Podstawowe definicje (2)id 19609 ppt
2 Realizacja pracy licencjackiej rozdziałmetodologiczny (1)id 19659 ppt
więcej podobnych podstron