BADANIA SYSTEMU POJAZDÓW
PRZEZNACZONYCH DO REALIZACJI LOSOWEJ
LICZBY ZADAŃ TRANSPORTOWYCH
Wprowadzenie
Pojęcie systemu pojazdów przewidywanego
do realizacji losowej liczby zadań i pojęcie
zadania dla tego systemu pojazdów
Schemat problemu decyzyjnego metody
modelowania systemu pojazdów – idea,
parametry systemu, zmienna decyzyjna,
funkcja celu
Heurystyczny algorytm realizacji metody
Symulator cyfrowy realizujący algorytm metody
Sym_Sys_Poj_1
Przykład realizacji metody i zastosowania
symulatora
Podsumowanie
Plik: BO_FT_Badania_Sys_Poj_2007_[v1].doc

Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
1
BADANIA SYSTEMÓW POJAZDÓW
PRZEZNACZONYCH DO REALIZACJI LOSOWEJ
LICZBY ZADAŃ TRANSPORTOWYCH
1. Wprowadzenie
W okresie rosnącej konkurencji na rynku transportowym, zarówno wewnątrzgałęziowym
jak i między różnymi gałęziami transportu, niezbędne są skuteczne narzędzia do ocen
efektywności techniczno-ekonomicznej przedsięwzięć i systemów transportowych.
Określenie efektywności przedsięwzięć transportowych i efektywności funkcjonowania
systemów transportowych wymaga znajomości składowych kosztów (oraz relacji między
nimi) i ich sumy. Koszty działalności ponoszone przez operatora transportu działającego na
rynku usług publicznych, związane są m.in. z użytkowaniem taboru. Taborem dysponuje
najczęściej świadczący usługę na zasadzie własności lub wynajmu.
Dalej rozpatrywany jest problem operatora transportu, który świadczy usługi na rynku
usług publicznych. Do realizacji usług operator dysponuje m.in. systemem pojazdów. Rynek
usług transportowych świadczonych przez operatorów transportu może być określany za
pomocą liczby zadań transportowych.
Niech zadanie transportowe jest to usługa realizowana przez operatora (system) za
pomocą jednego pojazdu w ciągu pewnego okresu czasu (np. jednego dnia kalendarzowego).
Zapotrzebowanie na tak określone zadania transportowe może być losowe. W takiej
sytuacji, u operatorów transportu, zaistnieć może potrzeba racjonalizacji parku własnych
pojazdów gotowych do realizacji zadań transportowych.
W procesie racjonalizacji liczności parku własnych pojazdów, można wykorzystać
kryterium minimum średnich kosztów funkcjonowania systemu pojazdów w długim okresie
czasu.
Dalej pokazane zostanie zastosowanie tego kryterium do oceny dokonywanych zmian w
systemie. W tym celu zbudowane zostaną modele matematyczne systemu pojazdów i za ich
pomocą przedstawiony zostanie przykład badania możliwości realizacji losowej liczby
zadań transportowych przez system pojazdów o określonych parametrach.
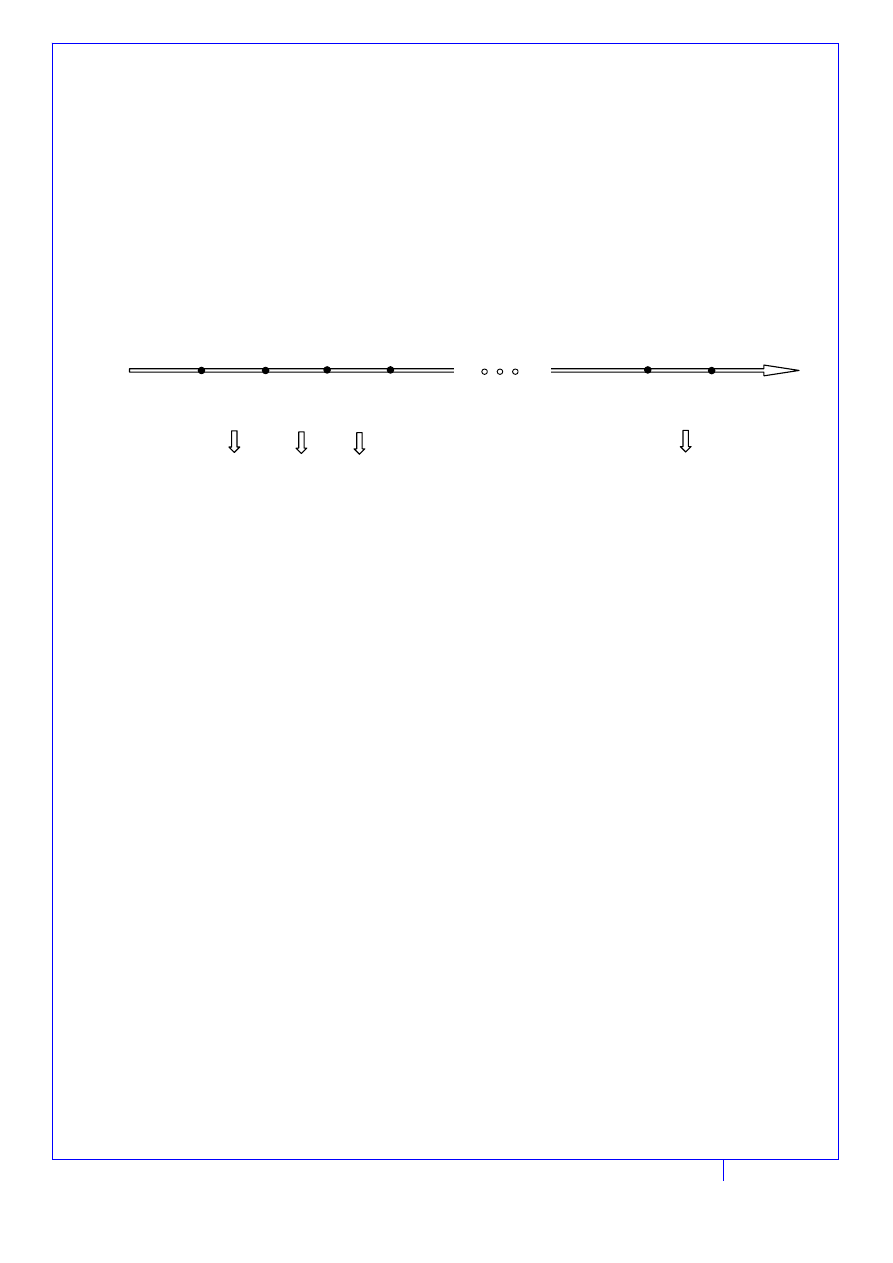
2. Modele matematyczne
1
. System pojazdów pracuje w czasie ciągłym, ale wszystkie możliwe zmiany stanu systemu
dokonywane są w określonych chwilach czasu t
1
, t
2
, ... . W stałych przedziałach czasu
T
i
= < t
i
, t
i+1
) pomiędzy kolejnymi chwilami t
i
( i = 1,2, ... ) stan systemu nie zmienia się.
Długość wszystkich T
i
okresów pracy systemu jest taka sama
Δ
t = t
i+1
- t
i
i wynosi np. 1 dzień kalendarzowy (rys. 1).
T
i-1
T
i
T
i+1
t
i-1
t
i+1
t
i
t
i+2
t
M
t
M+1
T
M
S(T
i
) S(T
i+1
)
S(T
i-1
)
S(T
M
)
K(T
i-1
)
K
śr
(T)
i-1
K
śr
(T)
i
K
śr
(T)
i+1
K
śr
(T)
M
K(T
i
) K(T
i+1
)
K(T
M
)
Rys. 1. Schemat wybranych oznaczeń stosowanych w formułach modeli matematycznych
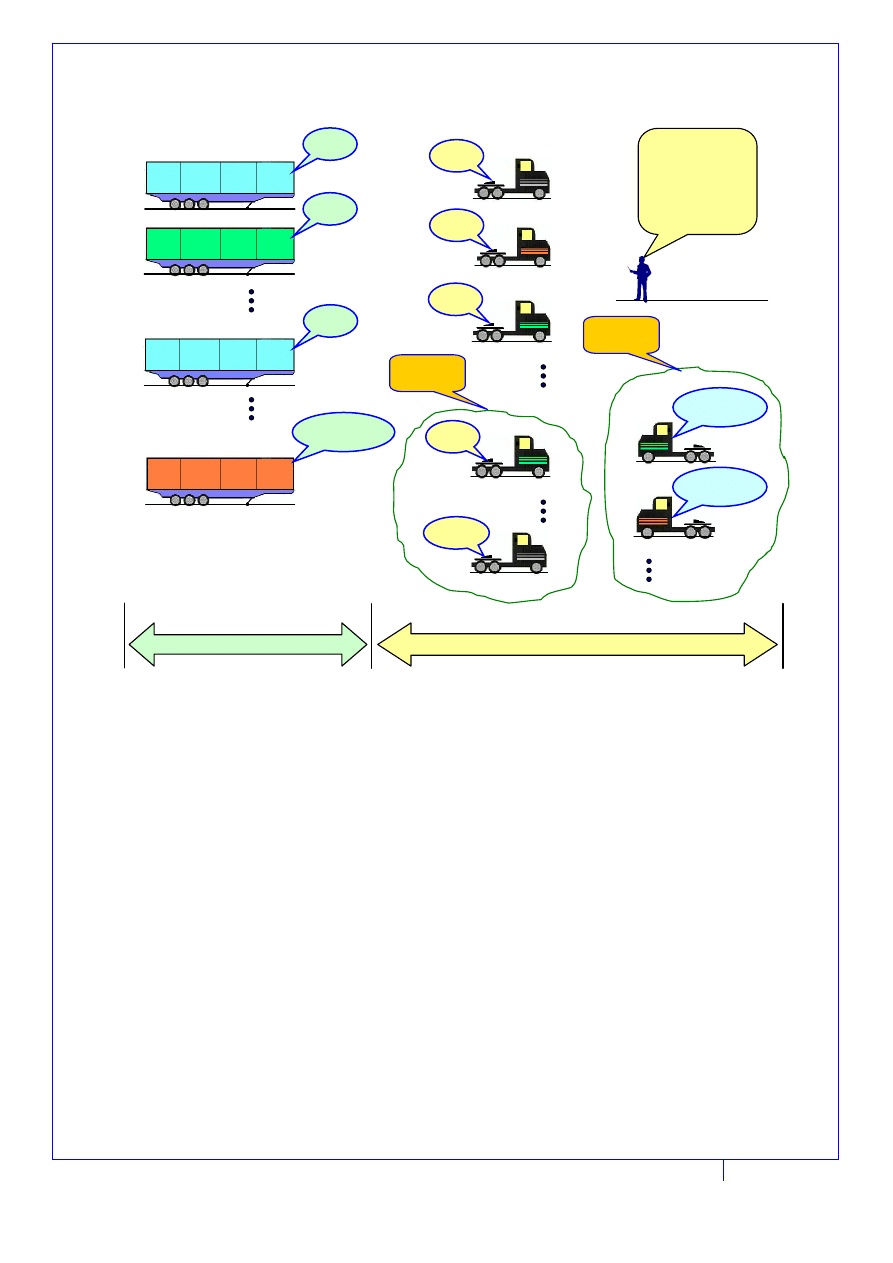
2
. W okresie T
i
, system (rys. 2) dysponuje losową liczbą L
poj
(T
i
) własnych pojazdów
(gotowych do realizacji zadań transportowych) o rozkładzie dyskretnym postaci:
( )
( )
{
}
( )
1
=
∈
=
=
∑
l
i
poj
i
poj
i
poj
l,
T
p
,
l,
l
T
L
P
l,
T
p
N
. (1)
3.
W chwili t
i
określane jest zadanie systemu pojazdów, wyrażające się liczbą pojazdów z,
które są potrzebne do realizacji tego zadania. Rozkład określający liczbę pojazdów, które
realizują zadanie systemu w okresie T
i
, przedstawia zależność:
( )
( )
{
}
( )
1
=
∈
=
=
∑
z
i
popyt
i
popyt
i
popyt
z
,
T
p
,
z
,
z
T
L
P
z
,
T
p
N
. (2)
System pojazdów realizuje wszystkie zgłoszenia zadań transportowych, nawet wtedy gdy
do wykonania ich części istnieje konieczność wynajęcia pojazdu z innego systemu.
4.
Stan systemu pojazdów w okresie T
i
określa wektor:
( )
( )
( )
[
]
i
popyt
i
poj
i
T
L
,
T
L
T
S
=
.
(3)
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
2
1
1
2
3
2
k
L
popyt
(T
i
)
L
poj
(T
i
)
j
L
nad
(T
i
)
L
poj
(T
i
)+1
F
popyt
(l)=?
L
poj
(T
i
)=?
K
śr
(T)
M
=?
k
wł
, k
wy
, k
ut
Zadania do realizacji
Pojazdy do realizacji zadań
L
poj
(T
i
)+2
L
wy
(T
i
)
Rys. 2. Schemat ideowy modelu problemu decyzyjnego realizacji zadań transportowych przez system
pojazdów firmy transportowej (objaśnienie oznaczeń zawarto w tekście)
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
3

5.
Koszty działalności systemu pojazdów wynikają z następujących kosztów jednostkowych
(przypadających na ustalony okres czasu T
i
):
i) k
wl
- jednostkowy średni koszt wykonania zadania transportowego
własnym pojazdem;
ii) k
wy
- jednostkowy średni koszt realizacji zadania transportowego
wynajętym pojazdem;
iii) k
ut
- jednostkowy średni koszt utrzymania własnego pojazdu bez względu na to
czy są dla niego zadania transportowe czy też nie.
W warunkach losowej liczby własnych pojazdów i losowego zapotrzebowania na nie,
generowane są określone całkowite koszty K(T
i
) funkcjonowania systemu w okresie czasu
T
i
. Koszty te przedstawiają następujące modele matematyczne:
a) gdy L
poj
(T
i
)
≥ L
popyt
(T
i
), tzn., że liczba własnych pojazdów gotowych do realizacji
zadań transportowych jest większa lub co najmniej równa zapotrzebowaniu na nie, to
wtedy
( ) (
)
( )
( )
( )
(
)
i
popyt
i
poj
ut
i
popyt
ut
wl
i
T
L
T
L
k
T
L
k
k
T
K
−
⋅
+
⋅
+
=
, (4)
b) gdy L
poj
(T
i
) < L
popyt
(T
i
), tzn., że liczba pojazdów własnych gotowych do realizacji
zadań transportowych jest mniejsza od zapotrzebowania na nie, to wtedy
( ) (
)
( )
( )
( )
(
)
i
poj
i
popyt
wy
i
poj
ut
wl
i
T
L
T
L
k
T
L
k
k
T
K
−
⋅
+
⋅
+
=
. (5)
6.
Rozpatrując funkcjonowanie systemu w długim okresie czasu T takim, że jest on wielokrotnością
okresów T
i
o długości
Δ
t
N
∈
⋅
=
M
,
Δt
M
T
, (6)
lub
, (7)
∑
=
=
M
i
i
T
T
1
można w następujący sposób przedstawić model matematyczny średnich kosztów
funkcjonowania systemu pojazdów w czasie T:
( )
( )
∑
=
⋅
=
M
i
i
M
śr
T
K
M
T
K
1
1
. (8)
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
4
3. Symulator do badania możliwości realizacji losowej liczby zadań
transportowych przez system pojazdów
Modele matematyczne kosztów funkcjonowania systemu pojazdów odwzorowano w
symulatorze cyfrowym Sym_Sys_Poj_1.Xls . Jest to aplikacja komputerowa składająca się z
arkuszy kalkulacyjnych opracowanych w formacie programu Excel. Podstawą symulatora
jest arkusz szablonu do symulacji. Na podstawie tego szablonu tworzone są arkusze do
przeprowadzania kolejnych eksperymentów symulacyjnych. Widok ekranów monitora
przedstawiających początkową i końcową fazę przeprowadzania przykładowej symulacji
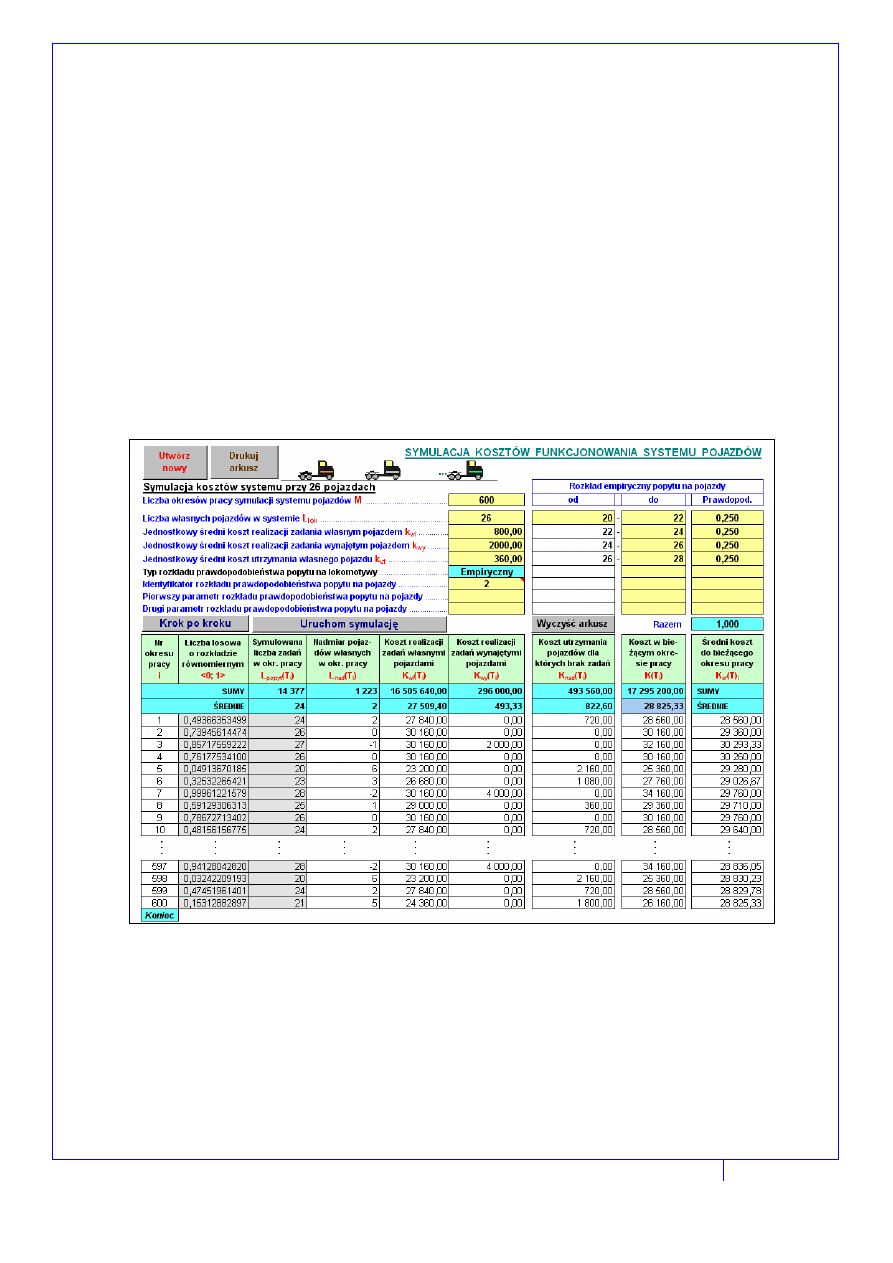
kosztów funkcjonowania systemu pojazdów, pokazano na rys. 3.
Rys. 3. Widok arkusza z danymi i fragmentem wyników symulacji kosztów funkcjonowania
systemu pojazdów dysponującego 26 własnymi pojazdami
Na ekranie zawsze widoczny jest formularz do wprowadzania danych opisujących
warunki eksperymentu symulacyjnego przeprowadzanego w ramach systemu pojazdów. W
formularzu należy zadeklarować:
− liczbę okresów pracy (czas) prowadzenia symulacji,
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
5

− liczbę własnych pojazdów w systemie,
− jednostkowe średnie koszty: realizacji zadań własnym pojazdem, realizacji zadań
wynajętym pojazdem, utrzymania własnego pojazdu,
− identyfikator i parametry rozkładu zapotrzebowania na pojazdy.
Wyniki symulacji po kolejnych doświadczeniach eksperymentu symulacyjnego
zapisywane i zapamiętywane są w bazie danych w układzie kolumnowym (rys. 3). W
kolejnych kolumnach tabeli rejestrowane lub obliczane są następujące wielkości:
− numer i-tego symulowanego okresu pracy odpowiadający numerowi doświadczenia
eksperymentu symulacyjnego,
− liczba losowa o rozkładzie równomiernym na przedziale <0;1> będąca podstawą
generowania zapotrzebowania na pojazdy w kolejnych doświadczeniach eksperymentu
symulacyjnego (z wyłączeniem przypadku, w którym zapotrzebowanie na pojazdy opisuje
rozkład normalny),
− symulowana liczba zadań do realizacji L
popyt
(T
i
) w i-tym okresie pracy eksperymentu
symulacyjnego (odpowiada popytowi na pojazdy),
− nadmiar własnych pojazdów L
nad
(T
i
) = L
poj
(T
i
) - L
popyt
(T
i
) w systemie w stosunku do
symulowanej liczby zadań do realizacji,
− całkowity koszt realizacji zadań własnymi pojazdami, obliczany według zależności:
a) gdy L
poj
(T
i
)
≥ L
popyt
(T
i
), to wtedy
( ) (
)
( )
i
popyt
ut
wl
i
wl
T
L
k
k
T
K
⋅
+
=
, (9)
b) gdy L
poj
(T
i
) < L
popyt
(T
i
), to wtedy
( ) (
)
( )
i
poj
ut
wl
i
wl
T
L
k
k
T
K
⋅
+
=
. (10)
− całkowity koszt realizacji zadań wynajętymi pojazdami, obliczany według zależności:
a) gdy L
poj
(T
i
)
≥ L
popyt
(T
i
), to wtedy
( )
0
=
i
wy
T
K
, (11)
b) gdy L
poj
(T
i
) < L
popyt
(T
i
), to wtedy
( )
( )
( )
(
)
i
poj
i
popyt
wy
i
wy
T
L
T
L
k
T
K
−
⋅
=
. (12)
− całkowity koszt utrzymania pojazdu dla których brak jest zadań, obliczany według
zależności:
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
6
a) gdy L
poj
(T
i
) > L
popyt
(T
i
), to wtedy
( )
( )
( )
(
)
i
popyt
i
poj
ut
i
nad
T
L
T
L
k
T
K
−
⋅
=
, (13)
b) gdy L
poj
(T
i
)
≤ L
popyt
(T
i
), to wtedy
( )
0
=
i
nad
T
K
. (14)
− całkowity koszt funkcjonowania systemu pojazdów w bieżącym (tzn. i-tym) okresie pracy,
obliczany według zależności:
( )
( )
( )
( )
i
nad
i
wy
i
wl
i
T
K
T
K
T
K
T
K
+
+
=
, (15)
− średni koszt funkcjonowania systemu pojazdów do bieżącego (tzn. i-tego) okresu pracy,
obliczany według zależności:
( )
(
∑
=
⋅
=
i
j
j
i
śr
T
K
i
T
K
1
1
)
. (16)
Użytkownik symulatora Sym_Sys_Poj_1.Xls ma do dyspozycji szereg przycisków, które
pozwalają w wygodny sposób prowadzić badania symulacyjne. Do przycisków przypisano
następujące procedury operacyjne (rys. 3):
− tworzenie arkusza roboczego do przeprowadzenia nowego eksperymentu symulacyjnego
na podstawie arkusza szablonu (przycisk »Utwórz nowy«),
− realizacja kolejnego doświadczenia eksperymentu symulacyjnego (przycisk
»Krok po kroku«),
− pełna realizacja (od doświadczenia bieżącego do doświadczenia odpowiadającego
zadeklarowanej liczbie okresów pracy) eksperymentu symulacyjnego (przycisk
»Uruchom symulację«).
− drukowanie wyników eksperymentu symulacyjnego (przycisk »Drukuj arkusz«).
− całkowite czyszczenie bazy danych z wynikami doświadczeń eksperymentu
symulacyjnego (przycisk »Wyczyść arkusz«),
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
7

4. Przykładowy eksperyment symulacyjny
Niech losowy popyt na pojazdy jaki musi zaspokoić system pojazdów określa empiryczny
rozkład prawdopodobieństwa postaci:
⎪
⎪
⎩
⎪⎪
⎨
⎧
≤
<
≤
<
≤
<
≤
≤
=
28
26
25
0
26
24
25
0
24
22
25
0
22
20
25
0
z
.
z
.
z
.
z
.
)
z
,
T
(
p
i
popyt
dla
dla
dla
dla
.
(17)
System wykonuje zadania za pomocą własnych pojazdów i pojazdów wynajętych.
Realizacja w taki sposób zadań transportowych wiąże się z określonymi kosztami.
Jednostkowy średni koszt wykonania zadania własnym pojazdem wynosi 800 zł, zaś
jednostkowy średni koszt wykonania zadania wynajętym pojazdem wynosi 2000 zł.
Dodatkowo, jednostkowy średni koszt utrzymania własnego pojazdu, niezależnie od tego czy
realizuje ona zadania czy też brak dla niego zadań do realizacji, wynosi 360 zł.
Należy wyznaczyć średnie koszty funkcjonowania systemu pojazdów (wyznaczane na
podstawie wzoru (8)) działającego w opisanych warunkach przy różnej liczbie własnych
pojazdów. Na tej podstawie należy ustalić jaką liczbą pojazdów własnych winien
dysponować system aby średnie koszty jego funkcjonowania były jak najmniejsze.
W celu odpowiedzi na postawione pytania przeprowadzono szereg eksperymentów za
pomocą symulatora Sym_Sys_Poj_1.Xls . Sposób przygotowania danych do eksperymentów
symulacyjnych pokazano już na rys. 2. Proces symulacji prowadzono przez M = 600 okresów
pracy – aż do stabilizacji wartości funkcji kryterialnej K
śr
(T)
i
.
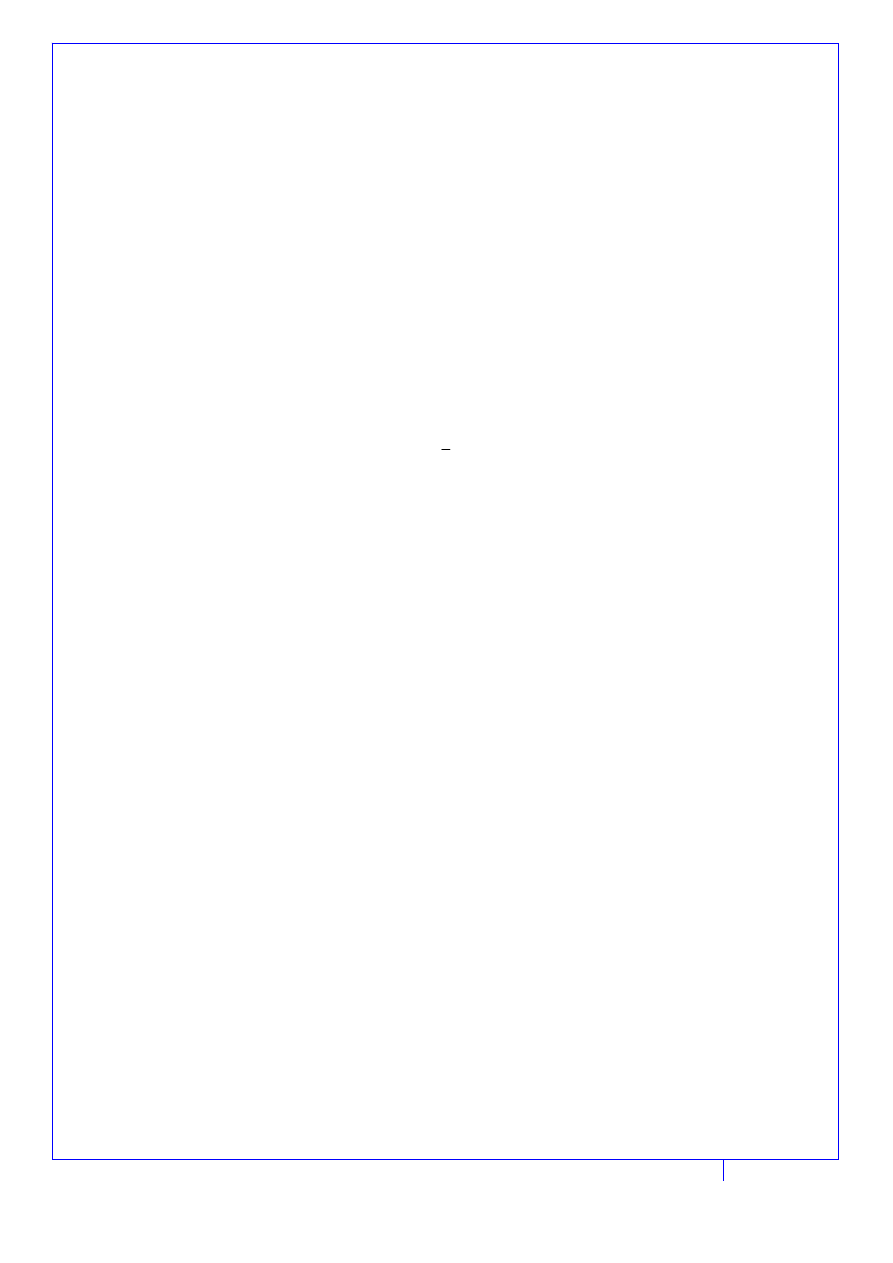
Przykład wyników symulacji kosztów funkcjonowania systemu pojazdów, przeznaczonego
do wykonywania w kolejnych okresach pracy liczby zadań określonej rozkładem
przedstawionym za pomocą formuły (17) a dysponującego do ich realizacji różnymi liczbami
własnych pojazdów, pokazano na rys. 4. Z przeprowadzonych badań symulacyjnych wynika,
że najmniejszą średnią wartością funkcji kryterialnej K
śr
(T)
600
oceny systemu charakteryzuje
się system dysponujący 26 własnymi pojazdami.
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
8
27 500
28 500
29 500
30 500
31 500
32 500
33 500
0
50
100
150
200
250
300
350
400
450
500
550
600
650
Czas symulacji - liczba okresów pracy - i
Ś
redni koszt funkcjonowania systemu - K
śr
(T)
i
22
27
26
Rys. 4. Wybrane wyniki symulacji kosztów funkcjonowania systemu pojazdów przeznaczonego
do realizacji losowej liczby zadań a dysponującego różnymi liczbami własnych pojazdów
5. Uwagi końcowe
Operatorzy transportu, zarówno już działający na rynku, jak i nowo wchodzący i/lub
pragnący poszerzyć swoją ofertę
− swój udział w rynku, narażeni są na duże ryzyko
niepowodzenia. Toteż kluczową sprawą jest określenie sposobu dobrego wykorzystania
istniejącego taboru oraz w przypadku wymiany lub rozbudowy parku pojazdów
− umiejętne i
korzystne dokonywanie zakupów inwestycyjnych.
Wychodząc naprzeciw spodziewanym potrzebom dokonywania analiz funkcjonowania
systemów pojazdów w warunkach losowo określonego zbioru zadań przewozowych,
opracowano modele matematyczne i symulator komputerowy. Główną trudnością jednak jest,
nie budowa poprawnych modeli i symulatorów, ale dotarcie do wiarygodnych źródeł
potrzebnych danych do ich weryfikacji. Z tego względu zaprezentowany w tym opracowaniu
przykład obliczeniowy należy traktować jako pokazanie potencjalnych możliwości
opracowanych modeli. Istnieje uzasadniona nadzieja, że w przypadku zainteresowania
prezentowaną tu problematyką operatorów transportowych, będzie łatwiej skłonić ich do
zbierania i udostępniania odpowiednich danych.
Plik:
AK_Badanie_Sys_Poj_2007_[v1].doc
9
Document Outline
Wyszukiwarka
Podobne podstrony:
2 BO 2 1 PP Przykłady Segregator [v1]
Badanie powietrza atmosferycznego v1, SPRAWKA
opis formatu sprawozdania z BO, Badania operacyjne
Maszyny przeplywowe badanie pompy wirowej v1
Metodyka BO, Badania operacyjne
2 BO 2 1 PP Przykłady Segregator [v1]
Maszyny przeplywowe badanie pompy wirowej v1
badania operacyjne, bo program
BO zadania rozne zestaw1, ZiIP Politechnika Poznańska, Badania Operacyjne
1 BO 1 1 PP Modelowanie Opisowe Segregator [v1]
Bo dyskr, wisisz, wydzial informatyki, studia zaoczne inzynierskie, badania operacyjne
Pojŕcia, badanie kliniczne, sekcja
BO, bo zagadnienie transportowe, Badania operacyjne - wprowadzenie
Cw 1 Badanie ginekologiczne Bo cz 1
BO cw3, ZiIP, II Rok ZIP, Badania operacyjne
BO cw4, ZiIP, II Rok ZIP, Badania operacyjne
więcej podobnych podstron