1
1
Agata Nawrocka
Agata Nawrocka
Katedra Automatyzacji Proces
Katedra Automatyzacji Proces
ó
ó
w
w
Akademia G
Akademia G
ó
ó
rniczo
rniczo
-
-
Hutnicza
Hutnicza
Automatyka i Robotyka
Automatyka i Robotyka
2
2
Plan wyk
Plan wyk
ł
ł
adu
adu
9
Wprowadzenie
9
Synteza metodami klasycznymi
9
Dobór parametrów regulatora
metoda Zieglera – Nicholsa
metoda charakterystyk częstotliwościowych
metoda linii pierwiastkowych
9
Synteza układów sterowania z uwzględnieniem
wskaźników jakości. Metoda przestrzeni stanów.
Automatyka i Robotyka
Wykład nr 10
3
3
Synteza układów sterowania, polega na doborze takiej
struktury układu i parametrów regulatora, by układ
mógł wykonać postawione przed nim zadania.
Postępowanie jest dwuetapowe:
9
Pierwszy etap
: określenie struktury układu regulacji i
typu regulatora (członu korekcyjnego). Zadania tego
etapu są najtrudniejszymi zagadnieniami zarówno teorii,
jak i praktyki sterowania.
9
Drugi etap
: dobór wartości parametrów regulatora.
Wprowadzenie
Automatyka i Robotyka
Wykład nr 10
4
4
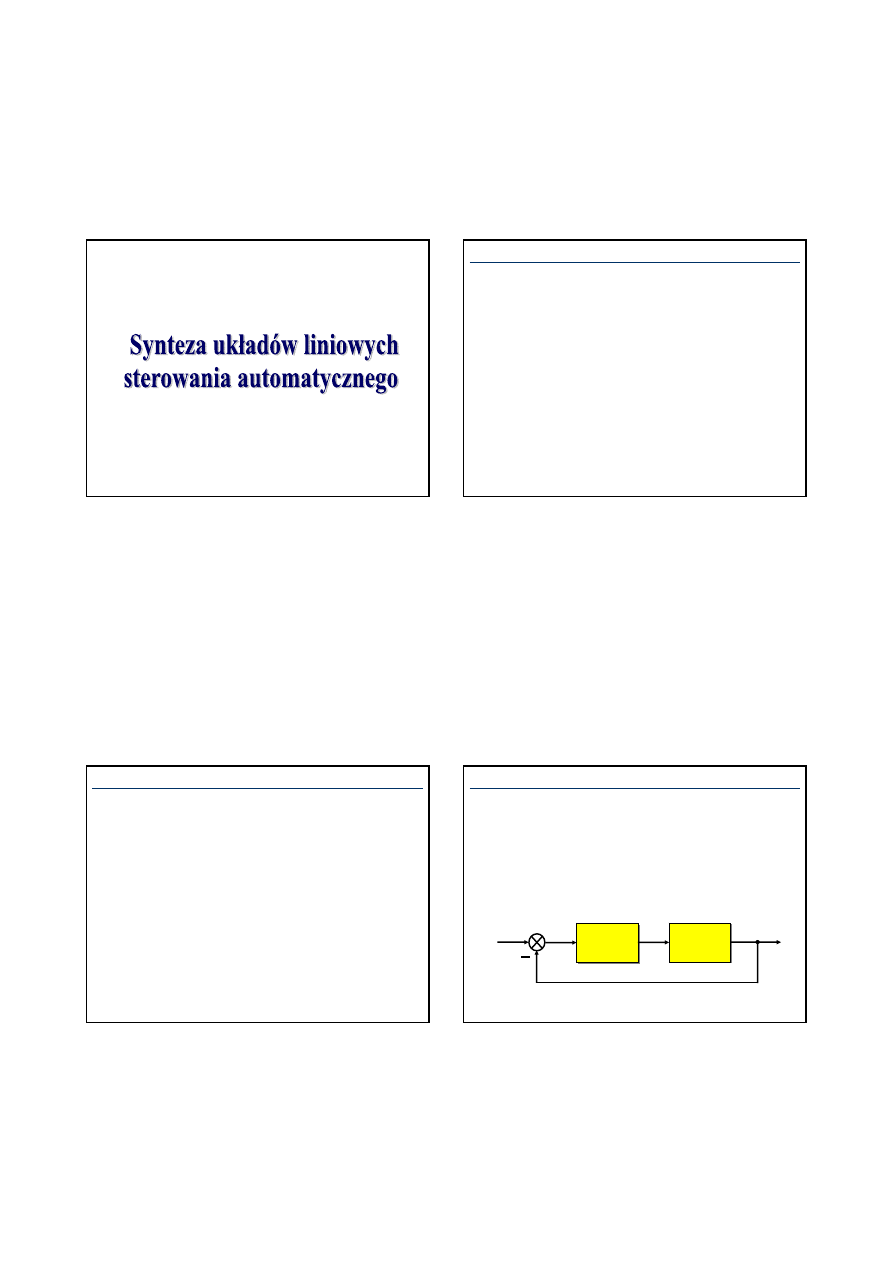
Najczęściej stosowana jest struktura szeregowa, w której
regulator jest włączony w tor główny układu regulacji czyli
szeregowo z obiektem.
Struktura szeregowa układu regulacji
Sygnałem wejściowym regulatora jest sygnał uchybu
e(t
e(t
)
)
,
,
sygnałem wyjściowym - sterowanie obiektu
u(t)
u(t)
.
.
w
w
e
e
u
u
y
y
R
R
O
O
Automatyka i Robotyka
Wykład nr 10
5
5
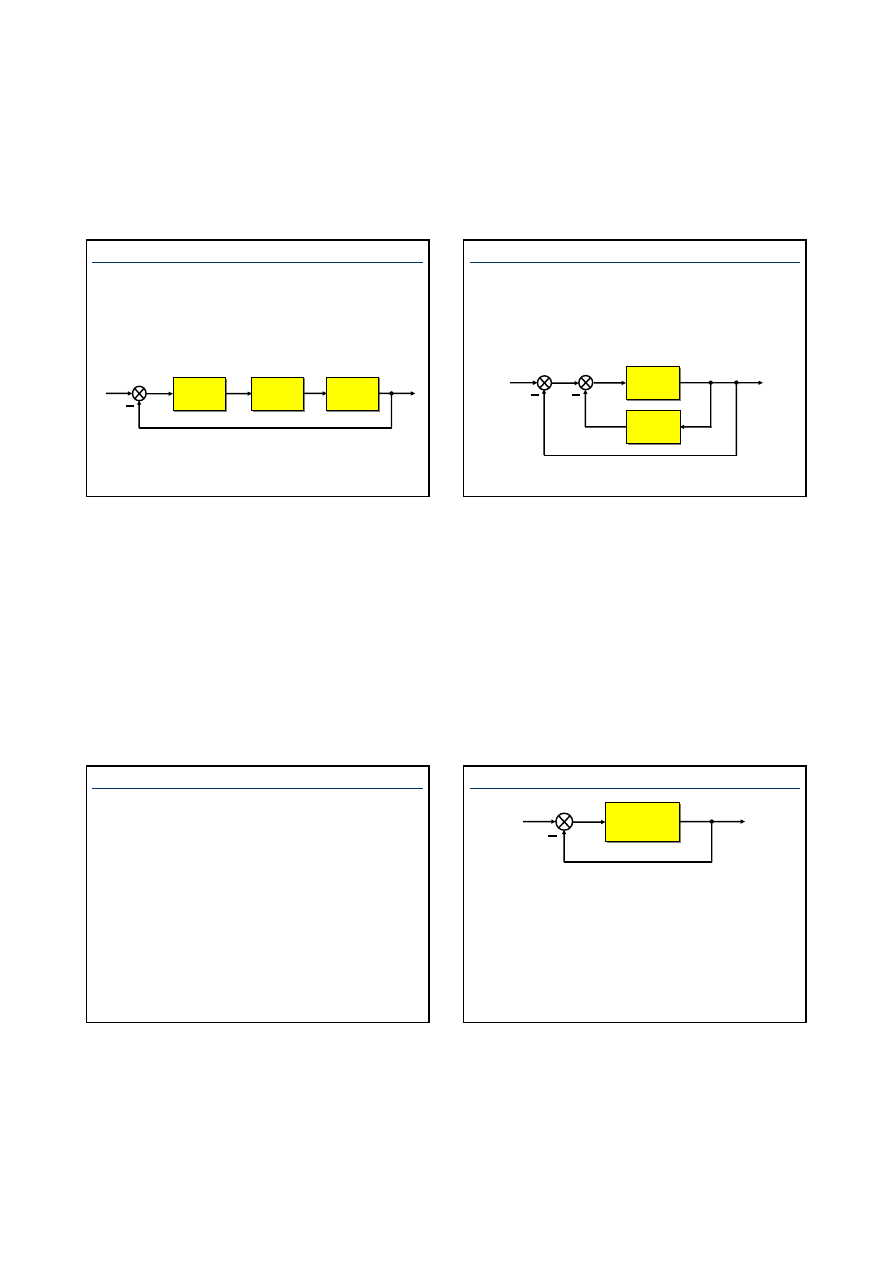
Niekiedy przed regulatorem włączany jest dodatkowo
element (człon) korekcyjny, którego zadaniem jest wstępne
uformowanie sygnału uchybu.
Włączanie członu korekcyjnego przed regulatorem
w
e
u
Człon
korekcyjny
Człon
korekcyjny
Regulator
Regulator
Obiekt
Obiekt
y
Automatyka i Robotyka
Wykład nr 10
6
6
Inną, często stosowaną - zwłaszcza w automatyce napędu -
strukturą układu regulacji jest struktura z dodatkowym
sprzężeniem zwrotnym, w którym człon korekcyjny jest
włączany w tor dodatkowego sprzężenia zwrotnego wokół
obiektu.
Struktura układu regulacji z dodatkowym sprzężeniem
zwrotnym
w
e
u
Człon
korekcyjny
Człon
korekcyjny
Obiekt
Obiekt
y
Automatyka i Robotyka
Wykład nr 10
7
7
W obu powyższych przypadkach regulator i człon
korekcyjny mają za zadanie taką modyfikację właściwości
obiektu, by działanie skorygowanego układu zamkniętego
było zadowalające z punktu widzenia przyjętego kryterium
jakości.
Kryterium to łączy zwykle wiele elementów – takich jak:
9
uzyskanie odpowiednich parametrów odpowiedzi
skokowej na wymuszenie zewnętrzne w(t),
9
odporność na zakłócenia, zwłaszcza oddziałujące na
wejście obiektu.
Automatyka i Robotyka
Wykład nr 10
8
8
Podstawowymi wymaganiami stawianymi
jednowymiarowym układom regulacji automatycznej są:
Skorygowany układ zamknięty regulacji
9
dokładność statyczna,
9
zakres regulacji wielkości wyjściowej,
9
pasmo robocze (pasmo przenoszonych częstotliwości),
9
zapas stabilności.
w
e
y
Układ
zmodyfikowany
Układ
zmodyfikowany
Automatyka i Robotyka
Wykład nr 10
9
9
Synteza metodami klasycznymi
Synteza metodami klasycznymi
Przy klasycznej metodzie syntezy układów sterowania
najpierw zestawia się dane wyjściowe obejmujące zadanie
stawiane układowi, model matematyczny obiektu,
ograniczenia i warunki pracy. Na tej podstawia określa się
wymagania i ustala założenia.
Do podstawowych wymagań należą:
9
dokładność w stanach ustalonych,
9
zakres, w jakim wielkość
wyjściowa ma być
regulowana, stabilność i odpowiedni jej zapas,
9
charakter przebiegu procesów przejściowych (pasmo
przenoszonych częstotliwości).
Automatyka i Robotyka
Wykład nr 10
10
10
9
wyboru struktury układu,
9
dobiera wstępnie elementy i podzespoły,
9
sprawdza dokładność w stanie ustalonym,
9
sprawdza zakres regulacji.
Jeżeli nie odpowiadają one założonym, wprowadza się
odpowiednią korekcję właściwości statycznych przez
zmiany parametrów lub nastaw niektórych elementów.
Po przyjęciu założeń dokonuje się:
Automatyka i Robotyka
Wykład nr 10
11
11
9
Jeżeli uda się uzyskać wymaganą dokładność w stanie
ustalonym i zakres regulacji, należy z kolei zbadać
stabilność tego układu.
9
Ponieważ parametry układu mogą ulegać zmianie (np.
zależnie od warunków otoczenia oraz przebiegu procesu
technologicznego w obiekcie sterowania) należy
zapewnić
stabilność
w najbardziej niekorzystnym
przypadku.
9
Uzyskuje się to przez zaprojektowanie układu z
odpowiednim marginesem bezpieczeństwa, biorąc pod
uwagę stabilność i jakość regulacji. Dogodnie jest to
wyrazić np. przez zapas amplitudy i zapas fazy.
Automatyka i Robotyka
Wykład nr 10
12
12
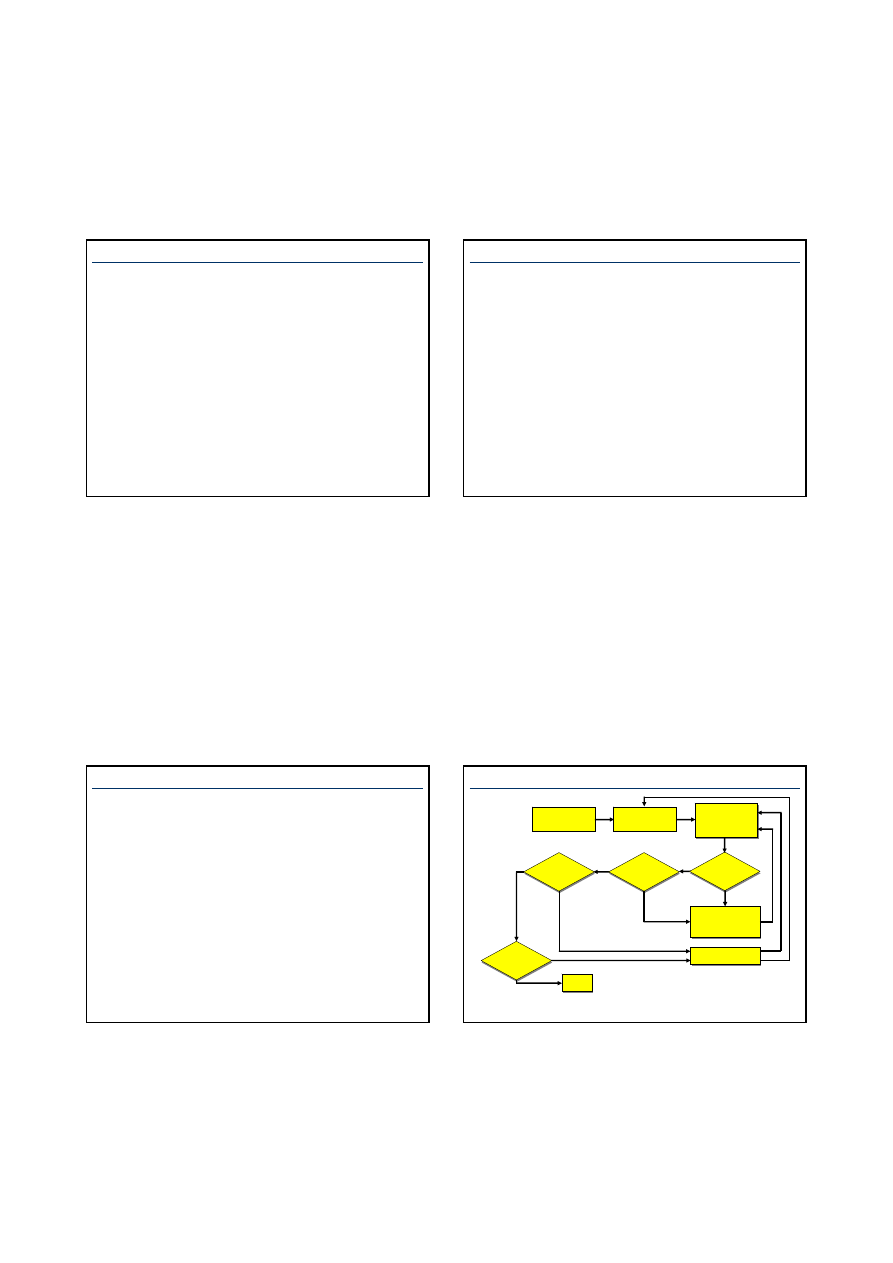
Schemat postępowania przy syntezie układu sterowania metodami
klasycznymi
Ustalenie
założeń
Ustalenie
założeń
Dokładność
w stanie
ustalonym
Stabilność i
jej zapas
tak
tak
tak
tak
nie
nie
nie
Korekcja
właściwości w
stanie ustalonym
Korekcja
właściwości w
stanie ustalonym
Korekcja
dynamiczna
Korekcja
dynamiczna
STOP
STOP
Właściwości
dynamiczne
Wybór struktury
Wybór struktury
Dobór
elementów i
podzespołów
Dobór
elementów i
podzespołów
Wymagania
dodatkowe
nie
Automatyka i Robotyka
Wykład nr 10
13
13
Dob
Dob
ó
ó
r parametr
r parametr
ó
ó
w regulatora
w regulatora
9
Metoda Zieglera
Metoda Zieglera
-
-
Nicholsa
Nicholsa
Są to najbardziej znane i najprostsze w zastosowaniu
reguły, sformułowane na początku lat czterdziestych w
wyniku prowadzonych badań doświadczalnych.
Jak wykazano znacznie później, reguły te prowadzą do
minimalizacji całki z modułu uchybu (kryterium całkowe I).
Korzystanie z tych reguł wymaga wstępnego wprowadzenia
dwóch pojęć:
9
wzmocnienia krytycznego
wzmocnienia krytycznego
K
K
kr
kr
9
okresu drga
okresu drga
ń
ń
krytycznych
krytycznych
T
T
os
os
Automatyka i Robotyka
Wykład nr 10
14
14
Wzmocnienie krytyczne
Wzmocnienie krytyczne
to wzmocnienie regulatora
proporcjonalnego, który połączony szeregowo z obiektem
spowoduje znalezienie się układu zamkniętego na granicy
stabilności (pojawiają się niegasnące drgania okresowe).
Okres tych drgań
nazywany jest
okresem drga
okresem drga
ń
ń
krytycznych
krytycznych
T
T
os
os
.
Ponieważ bezpośrednie doświadczalne wyznaczenie tych
parametrów ze względów bezpieczeństwa jest trudne
stosuje się metody pośrednie.
Automatyka i Robotyka
Wykład nr 10
15
15
Automatyka i Robotyka
Wykład nr 10
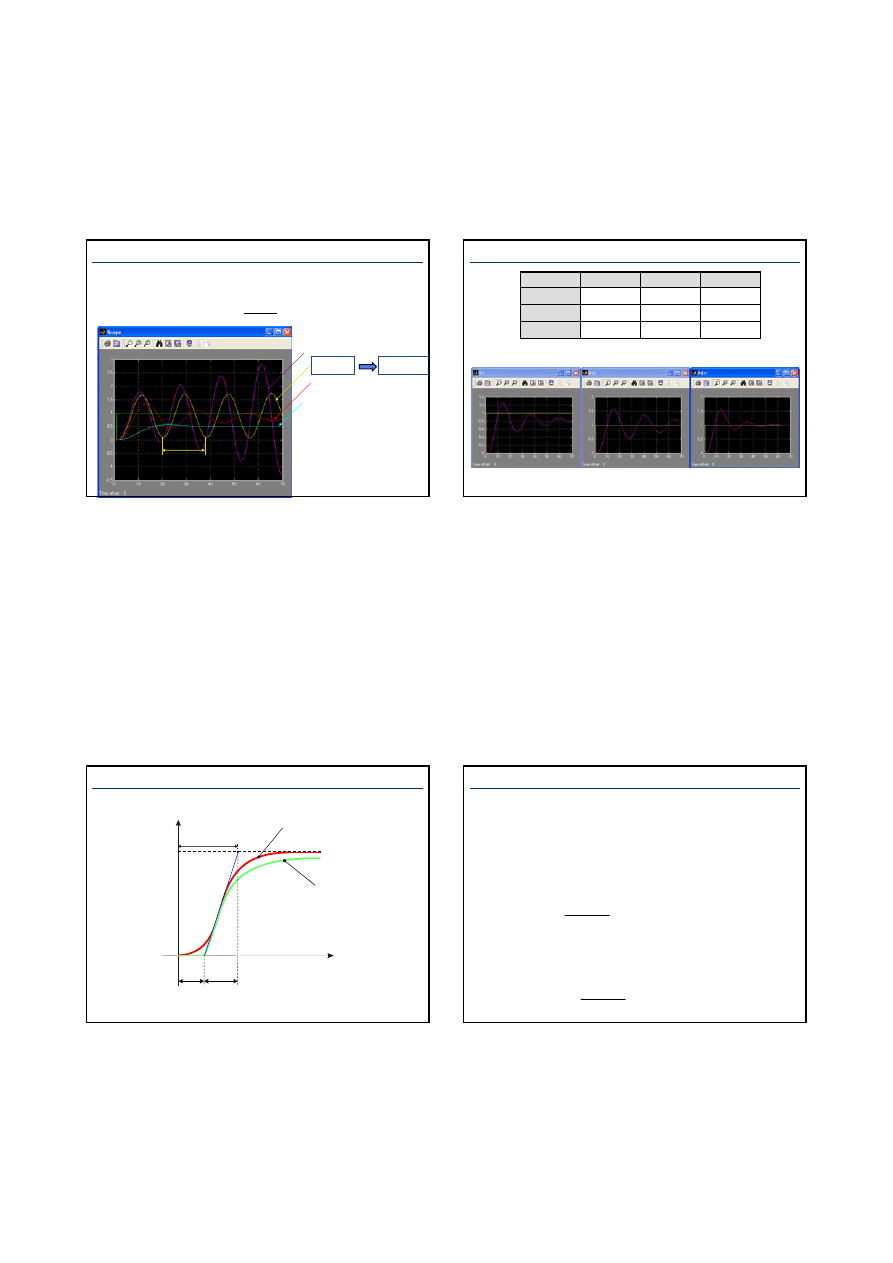
Wariant 1
Wariant 1
Kroki eksperymentu Z-N:
9
Ustawić regulator na działanie proporcjonalne P
9
Stopniowo zwiększając doprowadzić układ zamknięty do
granicy stabilności
9
Zapisać wzmocnienie krytyczne
K
K
kr
kr
i okres oscylacji
T
T
os
os
9
Określić nastawy według reguł podanych w tabeli dla
wybranego typu regulatora
0.125T
os
0.5T
os
0.6K
gr
PID
PID
-
0.83T
os
0.45K
gr
PI
PI
-
-
0.5K
gr
P
P
T
d
T
i
K
r
Regulator
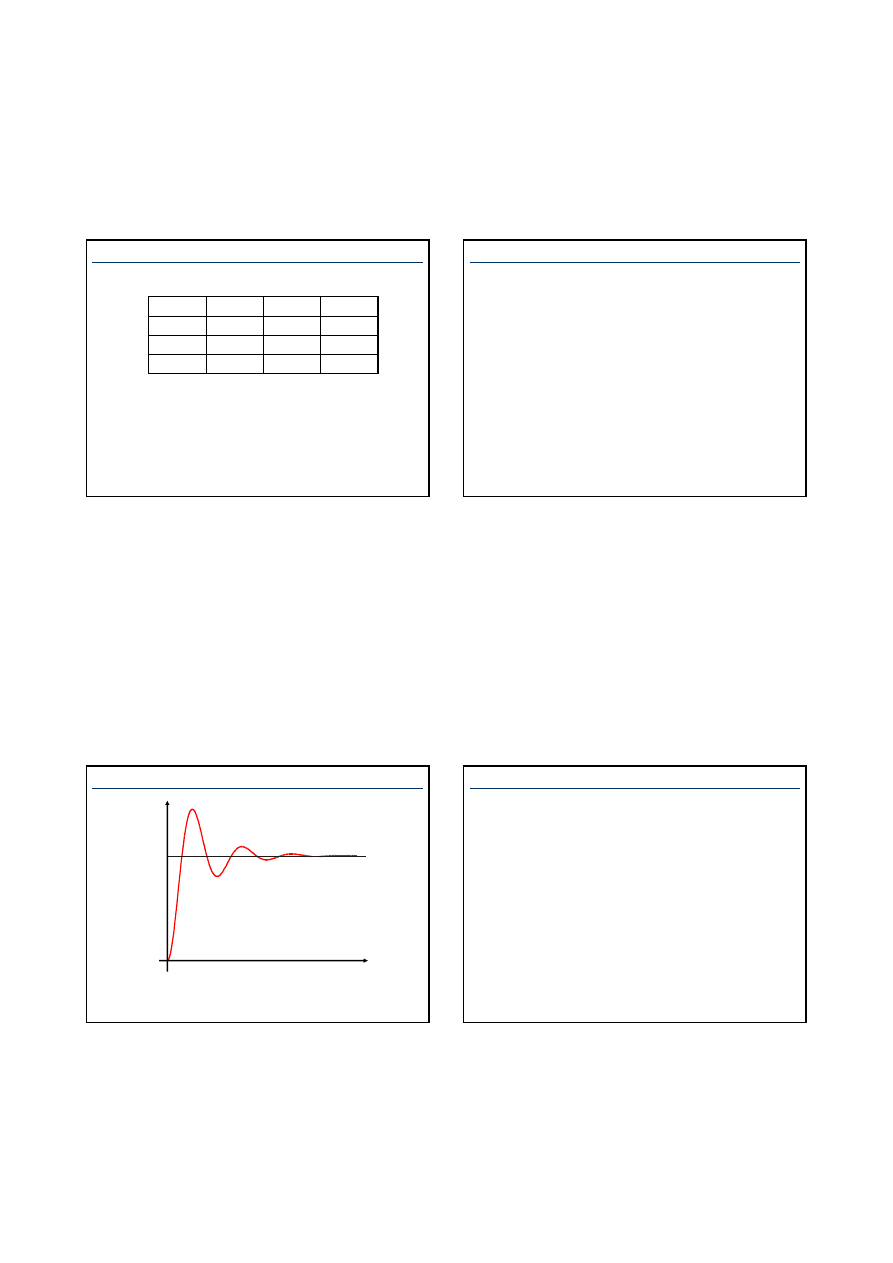
16
16
Automatyka i Robotyka
Wykład nr 10
Ograniczenia tej metody:
9
nie zawsze można przeprowadzić eksperyment
9
zakres współczynnika k
p
może być zbyt mały, aby
wzbudzić drgania
9
obiekt nie może być wzbudzony, bo jest stabilny
Nastawy bezpieczne:
9
zaczynamy od małego k
p
i stopniowo go zwiększamy
9
zaczynamy od dużego T
p
i stopniowo ja zmniejszajmy
9
zaczynamy od małego T
d
i stopniowo ja zwiększamy
17
17
Automatyka i Robotyka
Wykład nr 10
Dobrać nastawy regulatora P, PI, PID metoda Zieglera-
Nicholsa dla obiektu
Przyk
Przyk
ł
ł
ad
ad
( )
(
)
2
1
5
1
+
=
s
s
G
o
K
K
p
p
=10
=10
K
K
p
p
=8.2
=8.2
K
K
p
p
=1
=1
K
K
p
p
=5
=5
K
K
pkr
pkr
=8.2
=8.2
T
T
osc
osc
=17.8s
=17.8s
18
18
Automatyka i Robotyka
Wykład nr 10
2.14
8.9
4.92
PID
PID
-
15.18
3.69
PI
PI
-
-
4.1
P
P
T
d
T
i
K
r
Regulator
19
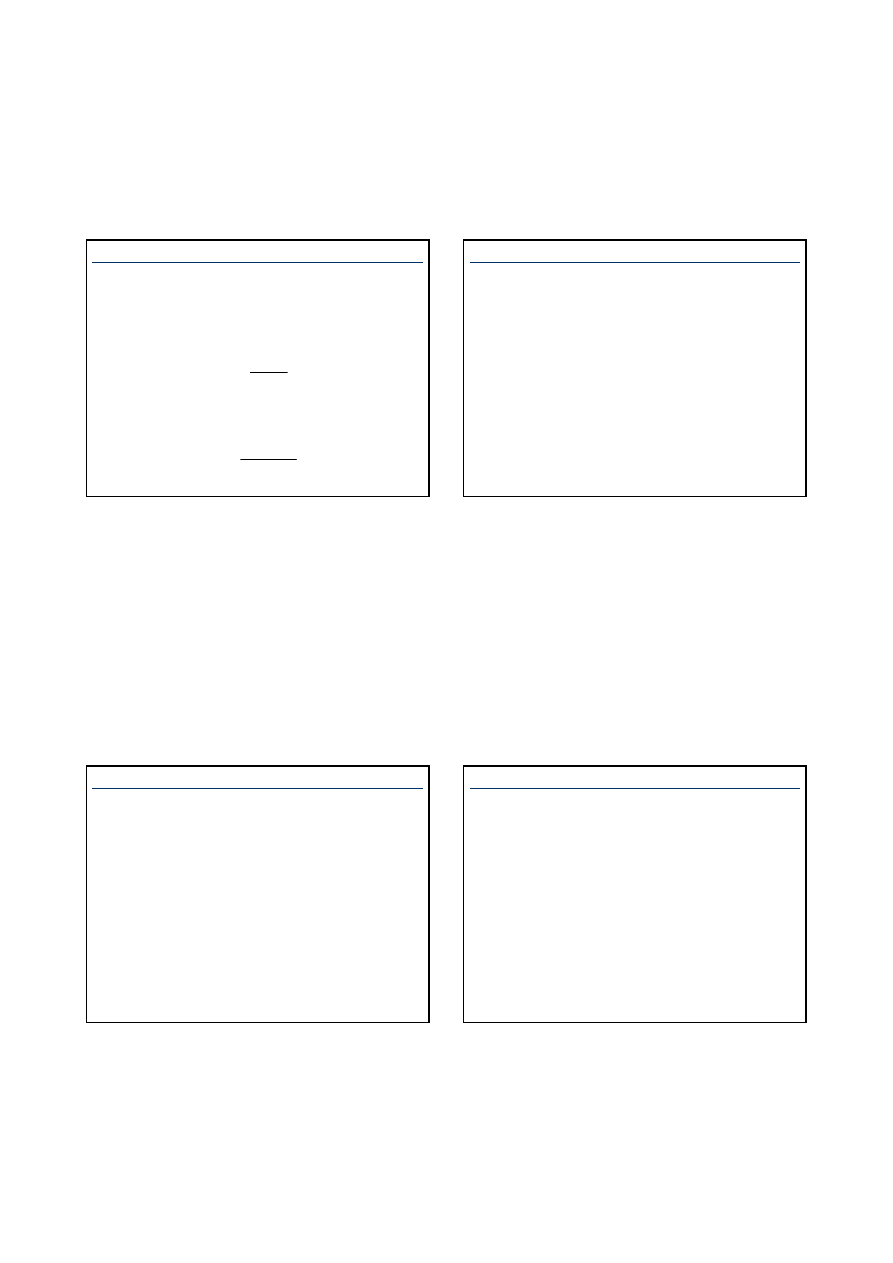
19
t
h(t)
T
τ
1 – charakterystyka
rzeczywista
2 – charakterystyka
przybliżona
1
Przybliżenie odpowiedzi skokowej obiektu statycznego
T
2
Automatyka i Robotyka
Wykład nr 10
Wariant 2
Wariant 2
20
20
Metody te oparte są na przybliżeniu odpowiedzi skokowej
obiektu statycznego (krzywa 1) - charakterystyką skokową
członu inercyjnego pierwszego rzędu z opóźnieniem
(krzywa 2) o transmitancji operatorowej
τ
s
e
Ts
s
G
−
+
=
1
1
)
(
0
τ
−
=
2
T
T
;
Według Zieglera i Nicholsa parametry K
kr
i T
os
wyrażone są
wzorami:
τ
τ
−
=
2
T
K
kr
τ
4
=
os
T
;
Automatyka i Robotyka
Wykład nr 10
21
21
Nastawy regulatorów według Zieglera i Nicholsa
0,125
0,5
0,6
PID
PID
-
0,83
0,45
PI
PI
-
-
0,5
P
P
T
d
T
os
T
i/
T
os
K/K
kr
Regulator
Przyjęcie nastaw regulatorów z powyższej tabeli, pozwala
uzyskać przebiegi przejściowe o charakterze zbliżonym do
przedstawionego na następnym rysunku. Przeregulowanie
jest rzędu 15 - 20%, a liczba oscylacji nie przekracza
dwóch.
o
r
K
K
K
=
- iloczyn wzmocnień regulatora i obiektu
Automatyka i Robotyka
Wykład nr 10
22
22
Automatyka i Robotyka
Wykład nr 10
Cechy tej metody:
9
szybka metoda doboru nastaw na podstawie modelu
obiektu
9
prostota, wymagany jest skok jednostkowy
9
układ regulacji jest stabilny
9
jakość regulacji nie jest wysoka
9
nie można jej stosować dla
τ >T
2
, wrażliwa przy
τ = T
2
9
do zastosowania do obiektów z wyrównaniem
9
duży skok może ujawnić istotne nieliniowości
9
wrażliwa na zakłócenia
23
23
Odpowiedź skokowa układu regulacji przy nastawach
regulatora według Zieglera i Nicholsa
h(t)
1
0
t
Automatyka i Robotyka
Wykład nr 10
24
24
9
przebiegu aperiodycznego o najkrótszym czasie
regulacji,
9
minimum całki z kwadratu uchybu,
9
przebiegu o 20% przeregulowaniu i najkrótszym
czasie regulacji.
Bardziej szczegółową analizę doboru nastaw regulatorów
przeprowadził zespół pracujący pod kierunkiem Cypkina.
Opublikował on zestaw nomogramów, umożliwiający dobór
nastaw regulatorów dla trzech zasadniczych kryteriów
jakości:
Automatyka i Robotyka
Wykład nr 10
25
25
Nomogramy te opracowano dla regulatorów
P
,
I
,
PI
i
PID
,
przy czym uwzględniano zarówno:
9
obiekty statyczne opisane transmitancją operatorową
9
jak i obiekty astatyczne o transmitancji operatorowej
τ
s
e
Ts
s
G
−
+
=
1
1
)
(
0
τ
s
e
Ts
s
K
s
G
−
+
=
)
1
(
)
(
0
0
Automatyka i Robotyka
Wykład nr 10
26
26
Metoda charakterystyk
Metoda charakterystyk
cz
cz
ę
ę
stotliwo
stotliwo
ś
ś
ciowych
ciowych
Dobór regulatora lub członu korekcyjnego możemy również
przeprowadzić
na podstawie analizy charakterystyk
częstotliwościowych układu.
Określić z nich można przede wszystkim:
9
zapas stabilności,
9
czas regulacji (oceniany na podstawie pulsacji
przecięcia),
9
przeregulowanie (oceniane na podstawie zapasu fazy).
Automatyka i Robotyka
Wykład nr 10
27
27
1.
wykreślić charakterystyki częstotliwościowe obiektu,
2.
wyznaczyć
minimalną
wartość
wzmocnienia,
konieczną
ze względu na ograniczenie uchybu
ustalonego,
3.
wyznaczyć minimalne wartości zapasu modułu i
zapasu fazy, konieczne ze względu na ograniczenie
przeregulowania oraz obszar zabroniony dla
charakterystyki częstotliwościowej układu otwartego,
Tok postępowania jest następujący:
Automatyka i Robotyka
Wykład nr 10
28
28
4.
wyznaczyć minimalną wartość pulsacji przecięcia
(powyżej której moduł transmitancji układu otwartego
jest mniejszy od jedności) układu skorygowanego,
konieczną ze względu na ograniczenie czasu regulacji,
5.
wybrać typ regulatora i naszkicować charakterystykę
układu z regulatorem,
6.
sprawdzić, czy warunki 2-4 są spełnione,
7.
jeśli wybrany typ regulatora nie spełnia postawionych
warunków bez względu na dobór nastaw, wybrać inny
regulator i powtórzyć postępowanie.
Automatyka i Robotyka
Wykład nr 10
29
29
Metoda linii pierwiastkowych
Metoda linii pierwiastkowych
Metoda linii pierwiastkowych (metoda miejsc
geometrycznych pierwiastków) - umożliwia wyznaczenie
położenia pierwiastków równania charakterystycznego
układu zamkniętego na podstawie rozmieszczenia zer
i biegunów transmitancji układu otwartego.
Ze zmianą wzmocnienia układu otwartego pierwiastki te
poruszają się po liniach pierwiastkowych, będących
miejscem geometrycznym pierwiastków.
Automatyka i Robotyka
Wykład nr 10
30
30
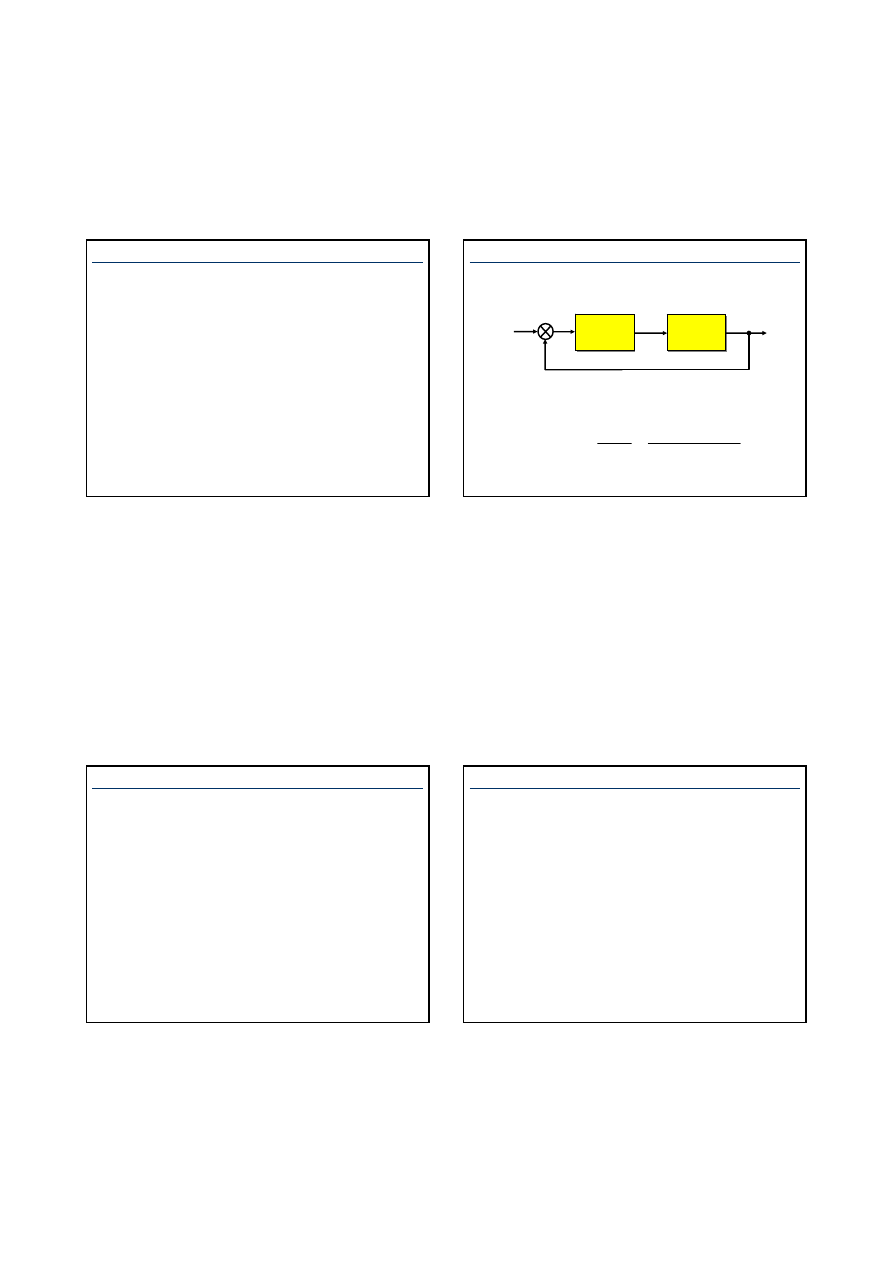
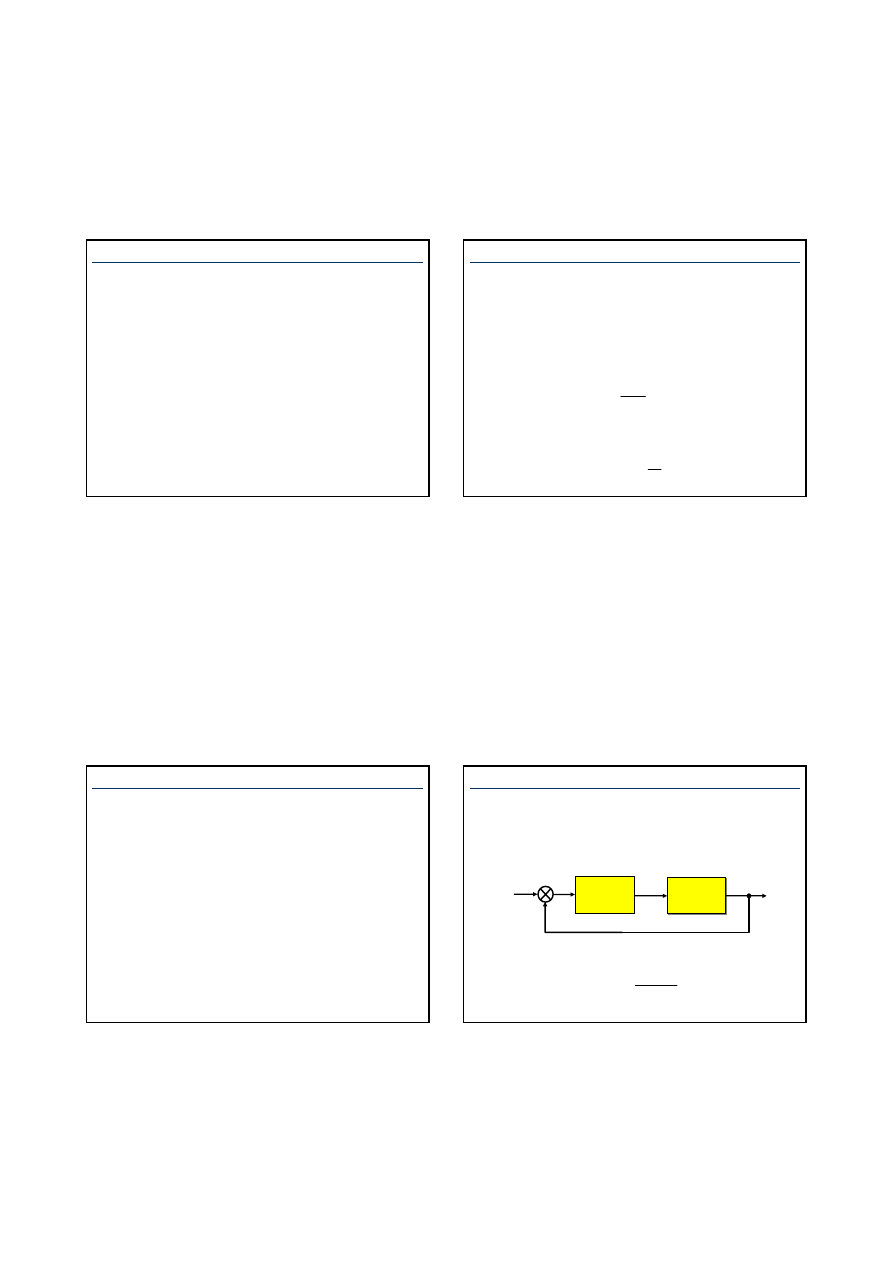
Rozpatrzymy układ ze sprzężeniem zwrotnym
Transmitancja układu zamkniętego wynosi
)
(
1
)
(
)
(
)
(
)
(
0
0
0
0
s
G
K
K
s
G
K
K
s
W
s
Y
s
G
p
p
Z
+
=
=
Regulator
K
p
Regulator
K
p
Obiekt
K
o
G
o
(s)
Obiekt
K
o
G
o
(s)
–
W(s)
W(s)
E(s)
E(s)
U(s)
U(s)
Y(s)
Y(s)
Automatyka i Robotyka
Wykład nr 10
31
31
Równanie charakterystyczne, którego pierwiastki są
biegunami transmitancji ma postać
0
)
(
1
0
0
=
+
s
G
K
K
p
Pierwiastki układu zamkniętego zależą od współczynnika
wzmocnienia
K
K
p
p
, tym samym możemy mieć wpływ na
odpowiedź dynamiczną układu zamkniętego przez dobór
odpowiedniej wartości
K
K
p
p
.
Rozważmy mechanizm konstruowania wykresu
pierwiastków przy wykorzystaniu wzmocnienia jako
zmiennego parametru.
Automatyka i Robotyka
Wykład nr 10
32
32
Założymy, że transmitancja układu otwartego K
p
K
0
G
0
(s)
jest funkcją wymierną, licznik ma postać K
p
K
0
b(s)
, gdzie
b(s)
jest wielomianem stopnia m
∏
=
−
−
=
−
−
−
=
=
+
+
+
=
m
i
i
m
m
m
m
z
s
z
s
z
s
z
s
b
s
b
s
s
b
1
2
1
1
1
)
(
)
)...(
)(
(
...
)
(
∏
=
−
−
=
+
+
+
=
n
i
i
n
n
n
p
s
a
s
a
s
s
a
1
1
1
)
(
...
)
(
Mianownik jest wielomianem a(s) n-tego stopnia, a n
≥
m
Automatyka i Robotyka
Wykład nr 10
33
33
Dla potrzeb analizy załóżmy, że wzmocnienie obiektu K
0
jest dodatnie, oraz zdefiniujmy parametr miejsca
geometrycznego jako
0
K
K
K
p
=
Miejsca zerowe (pierwiastki) b(s) = 0 są
zerami
zerami
transmitancji
transmitancji
G
Z
(s)
i oznaczamy je jako
z
z
i
i
, podobnie
miejsca zerowe (pierwiastki) a(s) = 0
są
biegunami
biegunami
transmitancji
transmitancji
G
Z
(s)
i oznaczamy je jako
p
p
i
i
.
Automatyka i Robotyka
Wykład nr 10
34
34
Możemy teraz przedstawić
położenie pierwiastków
równania na kilka możliwych sposobów. Każde z
poniższych równań ma te same pierwiastki
0
)
(
1
0
=
+
s
KG
0
)
(
)
(
1
=
+
s
a
s
b
K
0
)
(
)
(
=
+
s
Kb
s
a
K
s
G
1
)
(
0
−
=
Automatyka i Robotyka
Wykład nr 10
35
35
9
Równania te określa się często jako formuły pierwiastków
równania charakterystycznego.
9
Linia pierwiastkowa jest zbiorem wartości s, dla których
w powyższych równaniach zachowana jest dodatnia
wartość K (oraz K
p
).
9
Rozwiązaniami równań
są
pierwiastki układu
zamkniętego, więc można powiedzieć, że metoda linii
pierwiastkowych jest sposobem wnioskowania o
własnościach układu zamkniętego na podstawie
transmitancji układu otwartego KG
0
(s).
Automatyka i Robotyka
Wykład nr 10
36
36
Przykład
Transmitancja obiektu ma postać
)
1
(
)
(
0
0
+
=
s
s
K
s
G
Wyznaczyć położenie pierwiastków układu zamkniętego ze
względu na K
p
.
Regulator
K
p
Regulator
K
p
Obiekt
G
o
(s)
Obiekt
G
o
(s)
–
W(s)
W(s)
E(s)
E(s)
U(s)
U(s)
Y(s)
Y(s)
Automatyka i Robotyka
Wykład nr 10
37
37
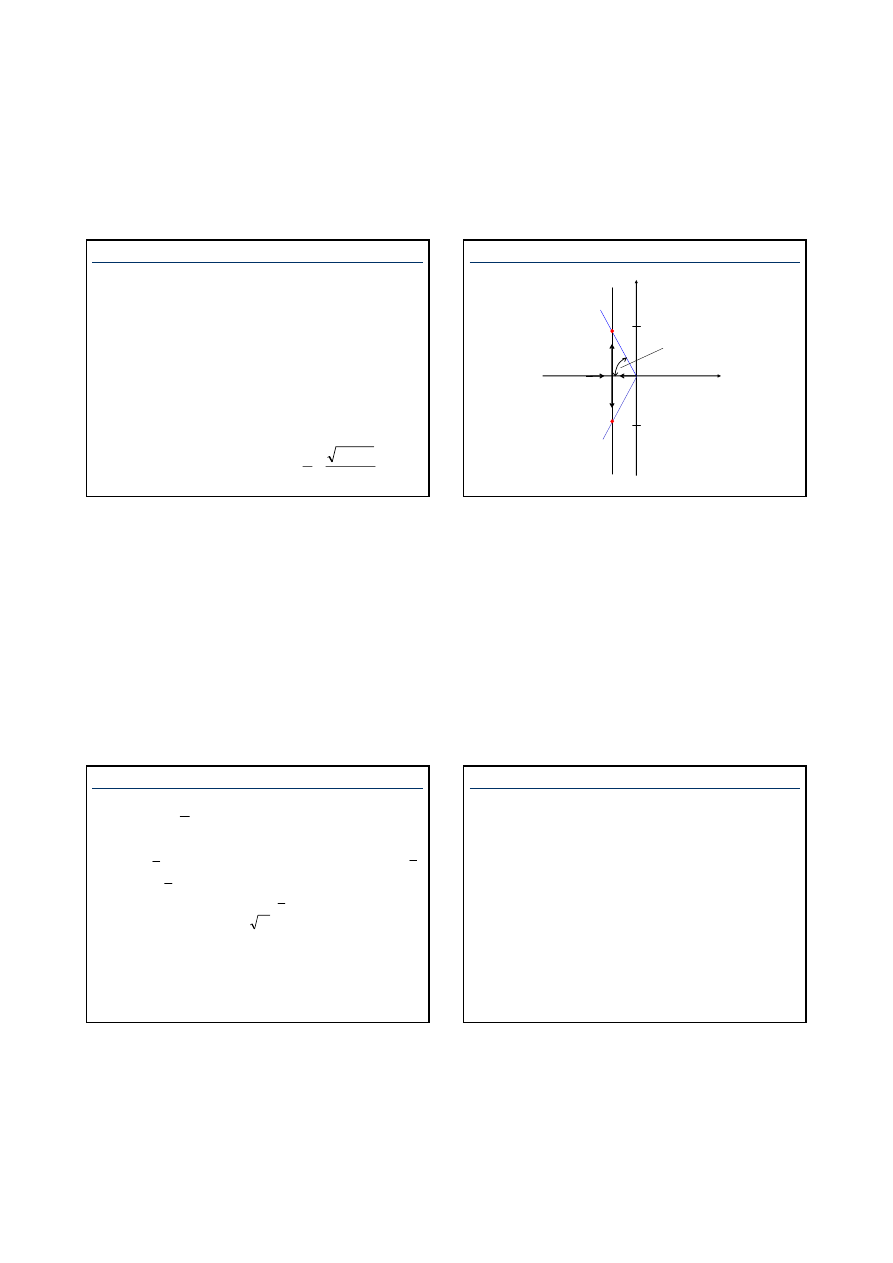
Charakterystyka położenia pierwiastków jest graficznym
przedstawieniem pierwiastków równania:
0
2
=
+
+
K
s
s
2
4
1
2
1
,
2
1
K
s
s
−
±
−
=
Rozwiązania mają postać:
czyli
0
)
(
)
(
=
+
s
Kb
s
a
m=
0
n=
2
K
0
=
1
a
(s)=s
2
+s
b
(s)=1
K = K
p
p
i
=
0, -1
Wykorzystując przyjęte wcześniej formy zapisu
Automatyka i Robotyka
Wykład nr 10
38
38
Re
Im
1
-1
-1
Szkic położenia pierwiastków
x
x
°
=
=
30
ξ
cos
θ
-1
Automatyka i Robotyka
Wykład nr 10
39
39
Zmieniając wartość K możemy umiejscowić bieguny układu
zamkniętego w dowolnych punktach należących do
charakterystyki pierwiastków.
9
Dla
pierwiastki przyjmują wartości rzeczywiste z
przedziału (-1,0).
4
1
0
≤
≤ K
9
Dla
istnieją dwa pierwiastki o wartościach równych
4
1
=
K
2
1
−
9
Dla
pierwiastki są liczbami zespolonymi, których
część rzeczywista ma wartość
, natomiast część urojona
wzrasta proporcjonalnie do
.
4
1
>
K
2
1
−
K
Automatyka i Robotyka
Wykład nr 10
40
40
Metoda klasyczna syntezy układu sterowania umożliwia
przyjęcie jednego z rozwiązań, natomiast nie daje podstawy
dla ustalenia, które z nich jest optymalne.
Ograniczeń takich nie mają np.
metody wykorzystujące
wskaźniki jakości
. Umożliwiają
one wyznaczenie
rozwiązań optymalnych tzn. takich, które zapewniają
minimalizację
przyjętego wskaźnika jakości -
przy
spełnieniu warunków wynikających z narzuconych
ograniczeń.
Synteza układów sterowania z uwzględnieniem
wskaźników jakości. Metoda przestrzeni stanów
Automatyka i Robotyka
Wykład nr 10
41
41
Automatyka i Robotyka
Wykład nr 10
Można wyróżnić następujące kryteria:
9
całki z wartości bezwzględnej odchyłki (ang. IAE)
9
całki z kwadratu odchyłki (ang. ISE)
9
całki z czasu pomnożonego przez wartość bezwzględną
odchyłki (ang. ITAE)
9
całki z kwadratu czasu pomnożonego przez odchyłkę,
wyrażenie całkowane i podniesione do kwadratu (ang. ISTES)
9
całki z kwadratu czasu pomnożonej przez kwadrat odchyłki
(ang. ISTSE)
( )
∫
∞
=
0
dt
t
e
I
( )
∫
∞
=
0
2
dt
t
e
I
( )
∫
∞
⋅
=
0
dt
t
t
e
I
( )
(
)
∫
∞
⋅
=
0
2
2
dt
t
t
e
I
( )
∫
∞
⋅
=
0
2
2
dt
t
t
e
I
42
42
Wskaźniki jakości bywają różne w zależności od rodzaju
układu, warunków jego pracy i postawionych mu wymagań.
Najczęściej formułuje się je jako funkcjonały całkowe, które
dla jednowymiarowych ciągłych i stacjonarnych układów
sterowania mają postać:
1
)]
(
,)
(
,...,
)
(
),
(
[
0
−
≤
=
∫
•
n
k
dt
t
u
t
y
t
y
t
y
f
I
k
t
t
r
gdzie: n - rząd równania opisującego układ sterowania.
Automatyka i Robotyka
Wykład nr 10
43
43
Przy takim sformułowaniu problemu sterowania występują
dwa zagadnienia:
9
znalezienie struktury i parametrów układu, przy
których dla danych ograniczeń i zadanych typowych
przebiegów sygnału sterującego, wskaźnik jakości
osiąga minimalną wartość - jest to zagadnienie
syntezy układu sterowania.
9
wyznaczanie takiego sterowania u(t), które
przeprowadza dany układ z pewnego stanu
początkowego do pewnego stanu końcowego w
sposób zapewniający minimalizację wskaźnika jakości
przy zachowaniu narzuconych ograniczeń.
Automatyka i Robotyka
Wykład nr 10
44
44
Ponieważ
całkowe kryteria jakości stosuje się
w
przypadkach, gdy głównym celem staje się ocena jakości
pracy układu, w wybranym przedziale czasowym często
stosuje się kryterium całki kwadratu uchybu w postaci:
(
)
∫
+
=
s
t
T
T
dt
Ru
u
Qx
x
J
0
gdzie:
Q
i R - dodatnio określone macierze wagowe,
x
i u - odpowiednio wektory stanu i wektor sterowań.
Automatyka i Robotyka
Wykład nr 10
45
45
Kryterium jakości w formie kwadratowej zawiera odchylenia
zarówno zmiennych stanu x, jak i zmiennych sterujących u,
od ich wartości optymalnych dla stanu ustalonego w
zakresie rozpatrywanego przedziału czasu sterowania t
s
.
Jeżeli układ sterowania opisany jest równaniem stanu:
)
(
)
(
)
(
t
Bu
t
Ax
t
x
+
=
i czas sterowania t
s
jest zadany, zadanie polega na
wyznaczeniu sterowania spełniającego powyższe równanie,
oraz minimalizującego funkcjonał (wskaźnik jakości).
Automatyka i Robotyka
Wykład nr 10
46
46
W zagadnieniach związanych z syntezą często spotykany
jest wskaźnik jakości będący całką kwadratu uchybu w
postaci:
∫
+∞
=
0
2
)
( dt
t
E
J
d
E
którą wyznacza się dla typowych stanów przejściowych w
rozważanym układzie.
Gdy układ jest stabilny asymptotycznie, a jego parametry są
tak dobrane, że odpowiedź jednostkowa ma przebieg
aperiodyczny, to wtedy przy zmniejszeniu wskaźnika jakości
zmniejszają
się
czasy t
m
, t
r
oraz maksymalne
przeregulowanie.
Automatyka i Robotyka
Wykład nr 10
47
47
Wyszukiwarka
Podobne podstrony:
8 synteza układu regulacji nowy
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
L2 PAA Modelowanie układu regulacji automatycznej z wykorzystaniem pakietu MATLAB Simulink(1)
Przemiennik? DC Wpływ parametrów układu regulacji na pracę napędu prądu stałego
7 ?danie układu regulacji temperatury
4 Synteza ukladu automatycznej Nieznany (2)
04 Wplyw parametrow ukladu regulacji na prace napedu pradu stalego
Badanie ukladu regulacji id 781 Nieznany (2)
cw 2 - Badanie modelu transformatorowego układu regulacji napięcia - Gustav, Politechnika Lubelska,
Analiza podstawowych członów układu regulacji
09 Analizowanie struktury układu regulacji
uklady zasilania cygana, Stopień niejednostajności regulatora cygana, Stopień niejednostajności regu
Analizowanie struktury układu regulacji i charakterystyk regulatorów
BADANIE UKŁADU REGULACJI DWUPOŁOŻENIOWEJ
Przemiennik AC-DC, Wpływ parametrów układu regulacji na pracę napędu prądu stałego - pytania
BADANIE UKLADU REGULACJI CIAGLE Nieznany (2)
L2 PAA Modelowanie układu regulacji automatycznej z wykorzystaniem pakietu MATLAB Simulink(1)
Projektowanie ukladu regulacji rozmytej
więcej podobnych podstron