Roboty P
rzemysłowe
4. Badanie
powtarzalności pozycjonowania robota
Adept Viper
W czasie zajęć należy wyznaczyć powtarzalność pozycjonowania robota Adept Viper dla
różnych wartości prędkości ruchu oraz różnych punktów startowych.
1.
Układ pomiarowy:
−
C
zujnik położenia z diodą laserową OMRON Z4M - pomiar w kierunku Y.
−
Wzmacniacz pomiarowy OMRON W100.
−
Czujnik położenia z diodą laserową OMRON ZX2-LD100 - pomiar w kierunku X.
−
Wzmacniacz pomiarowy OMRON ZX2-LDA41.
−
Rejestrator cyfrowy TEAC GX-1.
−
Komputer pomiarowy z oprogramowaniem GX-1 Navigator i GxView.
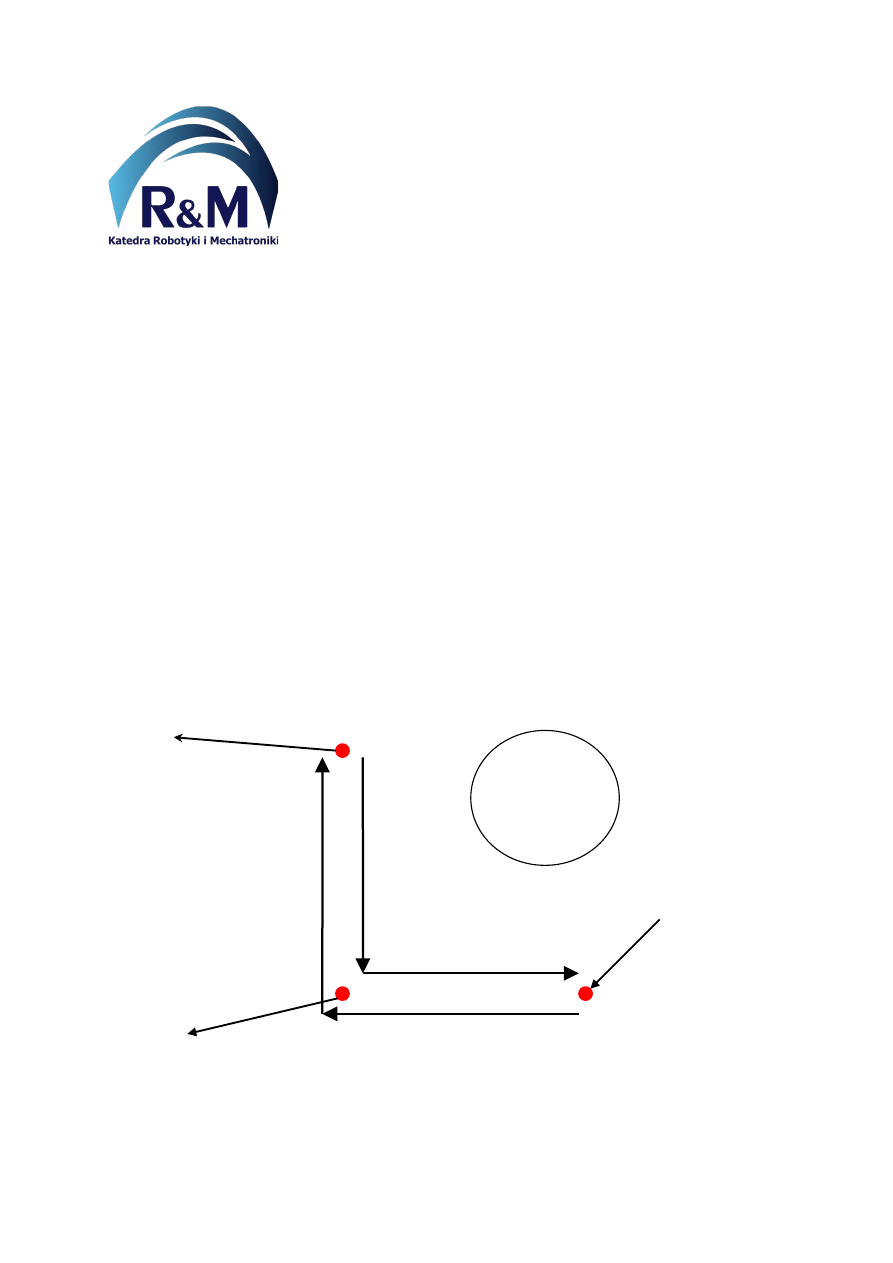
2. Opis pomiaru
−
Należy zarejestrować przebieg przemieszczenia efektora robota dla zadanej
trajektorii:
ruch z punktu 1 ( P1) do punktu pomiarowego,
postój 2 sekundy w punkcie pomiarowym (PP),
ruch do punktu 2 (P2) z punktu pomiarowego,
ruch do punktu pomiarowego z punktu 2 (P2),
postój 2 sekunda w punkcie pomiarowym (PP),
ruch do punktu 1 (P1) z punktu pomiarowego.
−
W trakcie pomiaru manipulator wykonuje zadaną trajektorię 20-sto krotnie.
−
Ruch manipulatora prostoliniowy wzdłuż kierunków X i Y.
−
Ustawienia rejestratora:
Częstotliwość próbkowania 500 Hz.
ADEPT
VIPER
P1
P2
PP

Częstotliwość odcięcia filtru dolnoprzepustowego: 200 Hz.
Wejście rejestratora: DC.
Zakres pomiarowy: ±10V.
Czułość czujnika położenia OMRON Z4M: 1V/cm.
Czułość czujnika położenia OMRON ZX2-LD100: 1,43 V/cm.
−
Wyniki pomiaru zostaną zapisane w pliku tekstowym.
3. Wyniki przeprowadzonych
badań należy zestawić w sprawozdaniu, które powinno
zawierać:
1. Opis stanowiska laboratoryjnego.
2.
Algorytm wyznaczenia powtarzalności pozycjonowania
3. Opis zarejestrowanych przebiegów
4.
Obliczone wartości powtarzalności pozycjonowania (RP) dla zadanego położenia.
5. Wnioski.
Document Outline
Wyszukiwarka
Podobne podstrony:
Lab04 Konfiguracja DHCP
plan pkm lab04
LAB04 2
AiP Lab04
Lab04 Ćwiczenie
Inf Lab04
lab04, I , II semestr, PEiTC
lab04-help
sop-2009-lab04
plan pkm lab04
infa Inf Lab04
Lab04 Sprawozdanie id 258808 Nieznany
Lab04 Network Design
Inf Lab04
Lab04
lab04
SiS LAB04 Dawid Warchoł EF-DI1 2008 L14, Studia, Semestr 1, Sygnały i Systemy, Sprawozdanie 4
lab04 instr
więcej podobnych podstron