2010-02-12
1
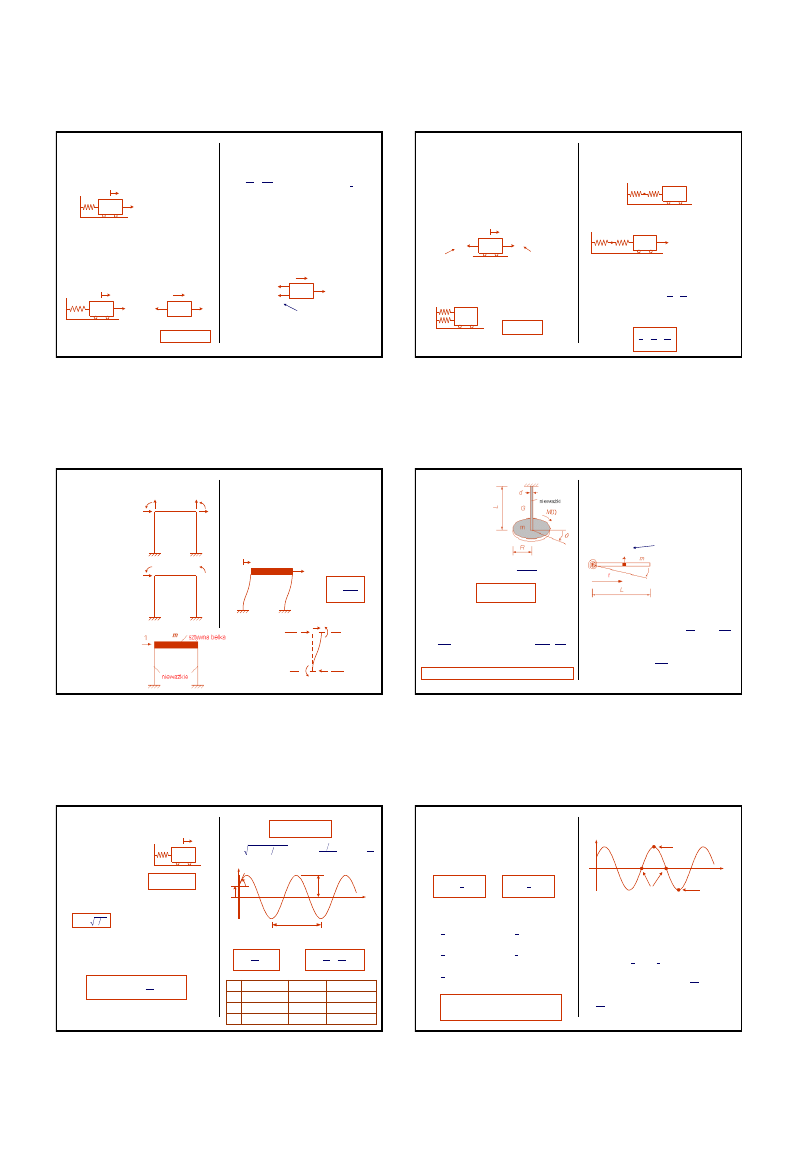
Rozważamy układ o jednym stopniu swobody (1SS)
złożony z masy m połączonej z ostoją za pomocą
więzi sprężystej o sztywności k.
Dynamika konstrukcji 1.1
1SS - Wprowadzenie
W położeniu równowagi statycznej u = 0
k (N/m)
Druga zasada dynamiki Newtona
)
t
(
p
u
k
u
m
)
t
(
u
k
)
t
(
p
F(t)
)
t
(
u
m
Zasada
D’Alemberta
0
)
t
(
u
m
)
t
(
u
k
)
t
(
p
fikcyjna siła bezwładności
Równowaga dynamiczna
Równanie ruchu można wyprowadzić dwojako.
Układ
jest
w
równowadze
dynamicznej.
Wprowadzając siłę bezwładności o zwrocie
przeciwnym do zwrotu
przyśpieszenia, równą
iloczynowi
masy
i
przyśpieszenia
można
układać równania równowagi statycznej.
Siły działające na oswobodzoną masę
k
m
)
(t
u
)
(t
p
k
m
0
>
)
(t
u
)
(t
p
)
(t
p
)
(t
ku
)
(t
u
)
(t
p
)
(t
ku
)
(t
u
)
(t
u
m
)
t
(
F
u
E
u
L
s
Całkowitą siłę działającą na punkt materialny z
więzami można zapisać także jako:
2
u
k
(t)
)
t
(
2
1
s
E
u
p
L
gdzie
Sztywność k
Definicja
sztywności k jest taka sama jak w
metodzie
przemieszczeń:
Sztywność k jest równa reakcji (sile
zewnętrznej) potrzebnej do utrzymania
układu w równowadze pod działaniem
przemieszczenia u = 1.
Dynamika konstrukcji 1.2
Połączenie równoległe dwóch sprężyn
Sztywność układu:
2
1
k
k
k
Połączenie szeregowe dwóch sprężyn
k
m
1
=
u
.1
k
1
k
m
2
k
1
k
m
2
k
1
F
d ,
1
m
1
=
u
k
2
2
F
d ,
Sztywność układu:
2
2
2
d
k
F
d
k
F
1
1
1
k
F
F
2
1
:
statyka
1
1
2
1
2
1
k
k
k
k
d
d
2
1
1
1
1
k
k
k
więź sprężysta
siła zewnętrzna
Przykład
3
24
L
EI
k
Rama
może mieć 1SS
jeśli
składa
się
z
ciężkiego dachu opartego
na lekkich kolumnach.
Dynamika konstrukcji 1.3
1
2
6
5
4
3
1
2
3
1
=
u
k
1
3
12
L
EI
2
6
L
EI
3
12
L
EI
2
6
L
EI
Niektóre konstrukcje można liczyć jako 1SS
W zadaniu statyki, ta
rama ma 6 stopni
swobody.
Pomijając odkształcalność
podłużną odrzucamy 3
stopnie swobody.
Masą m układu 1SS jest masa dachu.
Sztywność można określić tradycyjnie:
Ruch obrotowy
)
(
:
t
M
C
J
dynamice
w
V
R
R
h
h
R
m
dr
r
d
h
dV
r
mR
J
2
0
4
2
0
3
2
2
2
2
L
V
mL
dr
A
AL
m
r
dV
r
0
2
2
2
3
d
m
r
r
J
m
Dynamika konstrukcji 1.4
Układ o 1SS może
znajdować się w ruchu
obrotowym.
L
G
d
π
C
C
M
:
statyce
w
32
4
J
Przykład:
Obliczenie J
dla obracającego się pręta
J
– moment bezwładności tarczy kołowej
względem osi pręta d:
moment wynikający z bezwładności obrotowej
elementarna siła
bezwładności
dm
r
3
2
mL
J
1SS
– Drgania swobodne
Drgania własne
)
sin(
B
)
cos(
A
)
(
t
t
t
u
n
n
m
k
n
n
t
t
u
u
u
u
u
u
B
A
o
o
o
o
0
0
)
sin(
C
)
(
t
t
u
n
(s)
T
n
n
2
(Hz)
T
f
n
n
n
2
1
(rad/s)
A i B
określa się z warunków początkowych
co można zapisać w postaci:
częstość kołowa
Dynamika konstrukcji 1.5
Układ drga wokół
położenia równowagi
statycznej bez siły
wymuszającej.
Równanie ruchu:
0
u
k
u
m
Rozwiązanie:
)
sin(
)
cos(
)
(
o
o
t
u
t
u
t
u
n
n
n
k
m
)
(t
u
C
sin
C
cos
)
(
C
o
o
o
o
u
u
u
u
n
n
2
2
okres drgań
częstość fizyczna
o
u
o
u
n
T
u
t
C
ω=2π/T [rad/s]
f=1/T [Hz]
n=60/T [c/min]
ω=
1
6,283
0,1047
f=
0,1592
1
0,0167
n=
9,549
60
1
Energia w drganiach własnych
W
każdej chwili czasowej energia całkowita
E jest
sumą energii kinetycznej E
k
oraz
energii
odkształcenia sprężystego E
s
.
2
2
1
)
(
)
(
t
u
m
t
E
k
2
2
1
)
(
)
(
t
u
k
t
E
s
)
(
C
)
(
sin
C
)
(
cos
C
)
sin(
C
)
cos(
C
)
(
)
(
)
(
m
k
k
t
k
t
m
t
k
t
m
t
E
t
E
t
E
n
n
n
n
n
n
n
s
k
2
2
2
2
2
2
2
2
2
2
1
2
1
2
1
2
1
2
1
E(t)
jest stała, czyli układ wykonuje
drgania zachowawcze.
Uwaga :
zasadę zachowania energii można
zapisać za pomocą równania różniczkowego.
2
2
2
1
2
1
u
k
u
m
t
E
)
(
0
d
d
t
E
0
0
ku
u
m
u
ku
u
u
m
t
E
d
d
Dynamika konstrukcji 1.6
u
t
max
=
0
=
k
E
s
E
0
=
=
k
E
s
E
max
0
=
=
k
E
s
E
max
Układ zachowawczy
2010-02-12
2
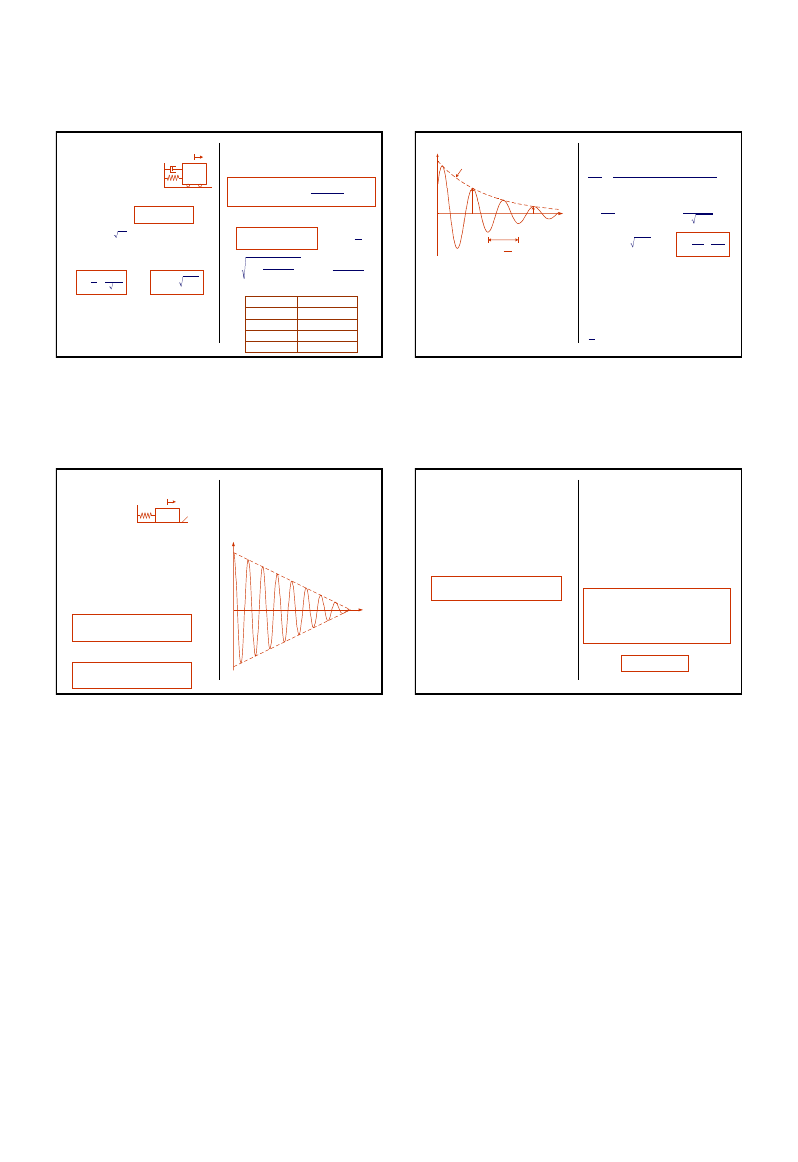
DRGANIA SWOBODNE TŁUMIONE
0
u
k
u
c
u
m
km
c
c
gdy
r
2
)
sin(
B
)
cos(
A
)
(
t
t
t
u
D
D
t
n
e
km
c
c
c
r
2
2
1
n
D
ω
)
cos(
B
)
sin(
A
)
sin(
B
)
cos(
A
)
(
t
t
t
t
t
u
D
D
D
D
D
D
t
t
n
n
n
e
e
D
n
t
t
u
u
u
u
u
u
ω
ξω
B
A
A
o
o
0
o
o
0
)
sin(
)
cos(
)
(
o
o
o
t
u
u
t
u
t
u
D
D
D
n
t
n
e
)
sin(
C
)
(
t
t
u
D
t
n
e
D
u
u
n
ω
ξω
θ
C
cos
o
o
Opory ruchu
w
układzie
można
przedstawić
w
postaci liniowej
więzi lepkiej
(wiskotycznej), w
której siła
oporu jest proporcjonalna
do
prędkości ruchu:
)
(t
u
c
f
D
A i B
określa się z warunków początkowych
Rozwiązanie można zapisać także w postaci:
Dynamika konstrukcji 1.7
Równanie ruchu:
współczynnik tłumienia
częstość drgań
2
2
D
u
u
u
n
ω
ξω
o
o
o
C
C
sin
o
u
θ
k
m
)
(t
u
c
to rozwiązaniem jest:
Konstrukcje
γ=2ξ
Stalowe
0,010-0,025
Drewniane
0,030-0.050
Murowe
0,040-0,080
Żelbetowe
0,050-0,100
Współczynniki tłumienia
Zanikanie ruchu
D
pT
t
t
n
p
n
D
D
D
D
D
pT
n
)
pT
(t
n
t
p
n
n
n
n
n
n
n
)
)
pT
(t
(
)
t
(
u
u
ξω
ξω
ξω
e
θ
ω
e
θ
ω
e
sin
C
sin
C
2
n
n
n
p
n
n
1
p
T
p
u
u
D
2
ln
p
n
n
u
u
p
ln
2
1
.
1
1
1
0
2
p
Dynamika konstrukcji 1.8
Pomiar
drgań swobodnych może dostarczyć
informację o częstości drgań i współczynniku
tłumienia konstrukcji
D
D
T
2
t
e
n
C
n
t
p
n
t
+
n
u
p
n
u
+
u
t
odstęp czasu między dwoma
maksymalnymi wychyleniami
p
n
n
u
i
u
Energia całkowita w trakcie drgań tłumionych jest
zużywana na pokonywanie oporów ruchu, kosztem
energii kinetycznej
0
E
E
dt
d
2
s
k
u
c
u
u
m
ku
u
u
m
u
ku
Liczbę ξ dla p=1, tj. przy dwóch kolejnych
maksymalnych wychyleniach nazywamy
logarytmicznym dekrementem tłumienia
Dynamika konstrukcji 1.9
Drgania swobodne z tłumieniem COULOMBA
k
m
)
(t
u
dry friction
Tłumienie Coulomba
wynika z tarcia między
dwoma suchymi
powierzchniami.
Siła oporu tarcia F =
N, gdzie
oznacza
współczynnik tarcia kinetycznego, a N jest siła
normalną między powierzchniami kontaktu.
Zakładamy, że F nie zależy od prędkości
ruchu a jej zwrot jest przeciwny do kierunku
wychylenia.
Równanie ruchu z lewej do prawej strony:
F
u
k
u
m
k
F
t
t
t
u
n
n
/
)
sin(
B
)
cos(
A
)
(
1
1
Równanie ruchu z prawej do lewej strony:
F
u
k
u
m
k
F
t
t
t
u
n
n
/
)
sin(
B
)
cos(
A
)
(
2
2
Stałe A
1
, B
1
, A
2
, B
2
zależą od warunków
początkowych ruchu w kolejnych półokresach.
Typowy wykres ruchu:
u
t
Dynamika konstrukcji 1.10
UKŁAD O SKOŃCZONEJ LICZBIE
STOPNI SWOBODY - WSS
)
t
(
)
t
(
p
u
k
u
c
u
m
1
p
q
k
q
c
q
m
WSS
SS
m
c
k
Macierze mas i
sztywności można otrzymać
np. na podstawie dyskretyzacji konstrukcji
(elementami
skończonymi).
Macierz
tłumienia musi być określona w inny
sposób.
TŁUMIENIE
Występują różne modele tłumienia, jednak
najczęściej stosuje się liniowy model tłumienia
wiskotycznego z
dwóch powodów:
• równania ruchu są proste
• wyniki otrzymane na podstawie tego
modelu
są dość zgodne z wynikami
eksperymentu
Jednak wtedy
współczynnik tłumienia
można określić jedynie doświadczalnie.
macierz sztywności
macierz tłumienia
macierz mas (bezwładności)
P
q
K
q
C
q
B
Wyszukiwarka
Podobne podstrony:
4) Drgania swobodne ukladu o dw Nieznany
Cw5 Drganie relaksacyjne id 123 Nieznany
IMIR drgania EM prady zmienne i Nieznany
2010 01 Wykład 6 Obwód LC drgania swobodne (2)
Lab 6 Drgania Swobodne Liniowych Układów Dyskretnych
Drgania swobodne tłumione
9 Skrecanie Swobodne id 48098 Nieznany (2)
Drgania Skretne Ukladu o Wielu Nieznany
konwekcja swobodna id 247083 Nieznany
drgania swobodne KOCT5NISA3EPEZYO7YVO455OTJAFVILQC6MZVZQ
Drgania swobodne, DLA KAROLINY
lop drgania w03 id 273123 Nieznany
drgania belka id 141945 Nieznany
Drgania swobodne
17 Drgania swobodne
7 Drgania i fale id 45166 Nieznany
Cw5 Drganie relaksacyjne id 123 Nieznany
IMIR drgania EM prady zmienne i Nieznany
2010 01 Wykład 6 Obwód LC drgania swobodne (2)
więcej podobnych podstron