
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Jerzy Kozłowicz
Obsługiwanie zespołów napędowych i nastawczych
731[01].Z2.02
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
dr inż. Edward Tyburcy
mgr inż. Krzysztof Idzior
Opracowanie redakcyjne:
mgr inż. Jerzy Kozłowicz
Konsultacja:
mgr inż. Ryszard Dolata
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 731[01].Z2.02
„Obsługiwanie zespołów napędowych i nastawczych”, zawartego w modułowym programie
nauczania dla zawodu mechanik automatyki przemysłowej i urządzeń precyzyjnych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1.
3
2.
5
3.
6
4.
Wprowadzenie
Wymagania wstępne
CC Cele kształcenia
Materiał nauczania
7
4.1. Podłączanie silnika elektrycznego jednofazowego do układu sterowania
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
9
4.1.3. Ćwiczenia
9
4.1.4. Sprawdzian postępów
10
4.2. Podłączanie silnika trójfazowego do układu sterowania oraz dobieranie
jego zabezpieczenia
11
4.2.1. Materiał nauczania
11
4.2.2. Pytania sprawdzające
14
4.2.3. Ćwiczenia
14
4.2.4. Sprawdzian postępów
16
4.3. Regulowanie i podłączanie mikrosilników
17
4.3.1. Materiał nauczania
17
4.3.2. Pytania sprawdzające
20
4.3.3. Ćwiczenia
20
4.3.4. Sprawdzian postępów
22
4.4. Wykonywanie połączenia siłownika pneumatycznego i hydraulicznego
z układem sterującym
23
4.4.1. Materiał nauczania
23
4.4.2. Pytania sprawdzające
27
4.4.3. Ćwiczenia
28
4.4.4. Sprawdzian postępów
29
4.5. Wyznaczanie charakterystyki zaworu
30
4.5.1. Materiał nauczania
30
4.5.2. Pytania sprawdzające
34
4.5.3. Ćwiczenia
34
4.5.4. Sprawdzian postępów
35
4.6. Regulacja siłownika elektrycznego liniowego i łączenie siłownika
z zaworem
36
4.6.1. Materiał nauczania
36
4.6.2. Pytania sprawdzające
41
4.6.3. Ćwiczenia
41
4.6.4. Sprawdzian postępów
42
4.7. Konfigurowanie struktury siłownika sterowanego prądowo i wyposażonego
w mikrokontroler
43
4.7.1. Materiał nauczania
43
4.7.2. Pytania sprawdzające
48
4.7.3. Ćwiczenia
48
4.7.4. Sprawdzian postępów
49
5. Sprawdzian osiągnięć
50
6. Literatura
55
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy o zasadach uruchamiania silników,
siłowników i zaworów.
W poradniku zamieszczono:
−
wymagania
wstępne,
czyli
wykaz
umiejętności,
jakie
powinieneś
umieć
przed przystąpieniem do nauki,
−
cele kształcenia, jakie powinieneś osiągnąć w czasie zajęć edukacyjnych tej jednostki
modułowej,
−
materiał nauczania – czyli wiadomości dotyczące metod badania i uruchamiania silników
i siłowników,
−
zestawy pytań, które pomogą Ci sprawdzić, czy opanowałeś podane treści nauczania,
−
ćwiczenia, które umożliwią Ci nabycie umiejętności praktycznych,
−
sprawdzian postępów,
−
sprawdzian osiągnięć,
−
wykaz literatury.
W materiale nauczania opisano budowę i zasady uruchamiania różnych silników
oraz zasady doboru zabezpieczeń. Opisano również budowę i zasady uruchamiania
siłowników elektrycznych, pneumatycznych i hydraulicznych. Przedstawiono sposoby
połączeń siłowników z zaworami oraz metodę komputerowego konfigurowania siłownika.
Poza przedstawieniem teoretycznej części dotyczącej silników i siłowników zaproponowano
w części ćwiczeniowej zestawy układów praktycznych, które będą wykonywane przez grupy
ćwiczeniowe.
Z rozdziałem Pytania sprawdzające możesz zapoznać się:
–
przed przystąpieniem do rozdziału Materiał nauczania – poznając przy tej okazji
wymagania wynikające z potrzeby zawodu,
–
po zapoznaniu się z rozdziałem Materiał nauczania, aby sprawdzić stan swojej wiedzy,
która będzie Ci potrzebna do wykonywania ćwiczeń.
Wykonując ćwiczenia zawarte w Poradniku lub zaproponowane przez nauczyciela
poznasz zasady uruchamiania podstawowych urządzeń automatyki.
Po wykonaniu ćwiczeń sprawdź poziom swoich postępów rozwiązując test Sprawdzian
postępów, zamieszczony po ćwiczeniach. W tym celu:
–
przeczytaj pytania i odpowiedz na nie,
–
podaj odpowiedź wstawiając X w odpowiednie miejsce.
Odpowiedź NIE wskazuje na luki w Twojej wiedzy, informuje Cię również o pewnych
brakach w przyswajanej przez Ciebie wiedzy. Oznacza to konieczność powrotu do treści,
które nie są dostatecznie opanowane.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości na temat
uruchamiania przetworników i regulatorów będzie podstawą do przeprowadzenia przez
nauczyciela sprawdzianu poziomu przyswajanych wiadomości i ukształtowaniu umiejętności.
W rozdziale 5 tego poradnika jest zamieszczony Sprawdzian osiągnięć, zawiera on:
–
instrukcję, w której omówiono tok postępowania podczas przeprowadzania sprawdzianu,
–
zestaw zadań testowych,
–
przykładową kartę odpowiedzi, w której, w przeznaczonych miejscach wpisz odpowiedź
na pytania; będzie to stanowić dla Ciebie trening przed sprawdzianem zaplanowanym
przez nauczyciela.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
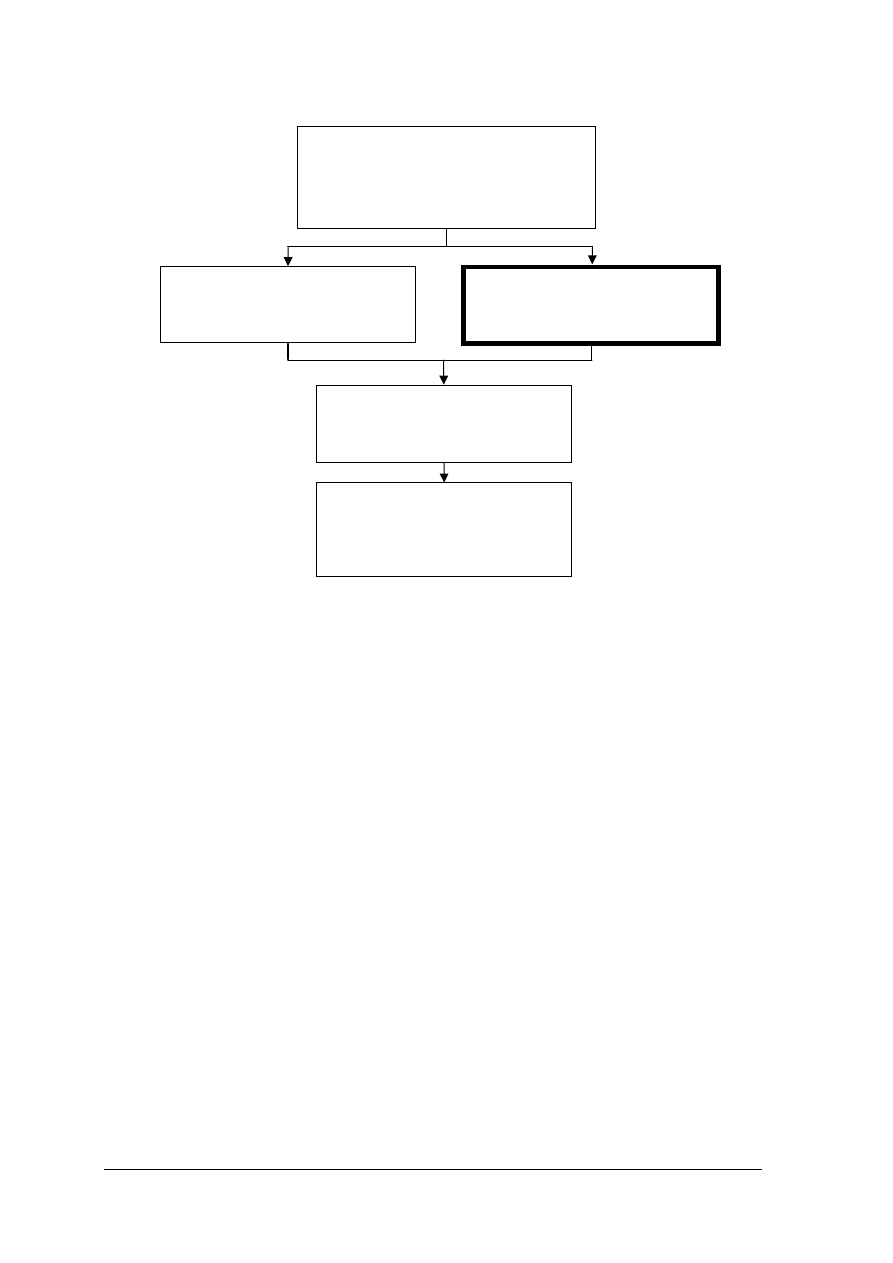
Schemat układu jednostek modułowych
731[01].Z2
Układy automatyki przemysłowej
i urządzenia precyzyjne
731[01].Z2.01
Uruchamianie przetworników
i regulatorów
731[01].Z2.02
Obsługiwanie zespołów
napędowych i nastawczych
731[01].Z2.04
Stosowanie elementów sterowania
i zabezpieczeń w urządzeniach
precyzyjnych
731[01].Z2.03
Określanie konstrukcji wybranych
urządzeń precyzyjnych

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
korzystać z różnych źródeł informacji,
−
stosować jednostki układu SI,
−
przeliczać jednostki,
−
wykonywać wykresy funkcji,
−
użytkować komputer,
−
wyjaśniać znaczenie członów automatyki,
−
stosować i znać symbole elektrycznych elementów stykowych,
−
stosować symbole elementów automatyki,
−
podłączać aparaturę kontrolno – pomiarową elektryczną i mechaniczną,
−
dobierać zakresy pomiarowe mierników elektrycznych,
−
współpracować w grupie,
−
stosować przepisy BHP.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
wyjaśnić działanie silników prądu stałego i przemiennego,
−
podłączyć silnik jedno i trójfazowy do układu sterowania,
−
dobrać zabezpieczenie dla podłączanego silnika,
−
zinterpretować informacje zawarte na tabliczce znamionowej silnika,
−
zastosować metody regulacji obrotów silników prądu stałego i przemiennego,
−
odczytać schematy pneumatycznych i hydraulicznych elementów wykonawczych,
−
objaśnić metody sterowania siłownikami pneumatycznymi i hydraulicznymi,
−
dobrać siłownik elektryczny do rodzaju elementu nastawczego,
−
podłączyć siłownik elektryczny oraz wyregulować elementy sterujące w siłowniku,
−
objaśnić działanie elementów nastawczych (zaworów, zasuw),
−
połączyć siłownik liniowy z elementem nastawczym i dokonać regulacji,
−
podłączyć
elektryczny
siłownik
uruchamiany
z
wykorzystaniem
programu
komputerowego do jednostki sterującej,
−
rozróżnić charakterystyki elementów nastawczych (zaworów),
−
zastosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
oraz ochrony środowiska.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4. MATERIAŁ NAUCZANIA
4.1. Podłączanie silnika elektrycznego jednofazowego do układu
sterowania
4.1.1. Materiał nauczania
Silnik indukcyjny jednofazowy składa się ze stojana i wirnika. Nieruchomy stojan jest
wykonany z izolowanych wzajemnie blach stalowych, charakteryzujących się wyciętymi
żłobkami na swym wewnętrznym obwodzie. W obszarze 2/3 wszystkich żłobków stojana jest
umieszczone uzwojenie główne (robocze) silnika, natomiast w pozostałej części znajduje
się nawinięte uzwojenie fazy pomocniczej (rozruchowej). Wirnik wykonany jest w formie
klatki dla silników małych mocy lub pierścieni dla silników dużej mocy.
Uzwojenie główne UG zasilane jest napięciem jednofazowym i wytwarza w stojanie
strumień magnetyczny zmieniający się w czasie. Wytworzone pole magnetyczne jest
pulsujące (oscylujące). Aby uzyskać niezbędne do wytworzenia początkowego momentu
rozruchowego przesunięcie w czasie prądu uzwojenia pomocniczego względem prądu
uzwojenia głównego, uzwojenie pomocnicze wykonuje się cieńszym przewodem lub do tego
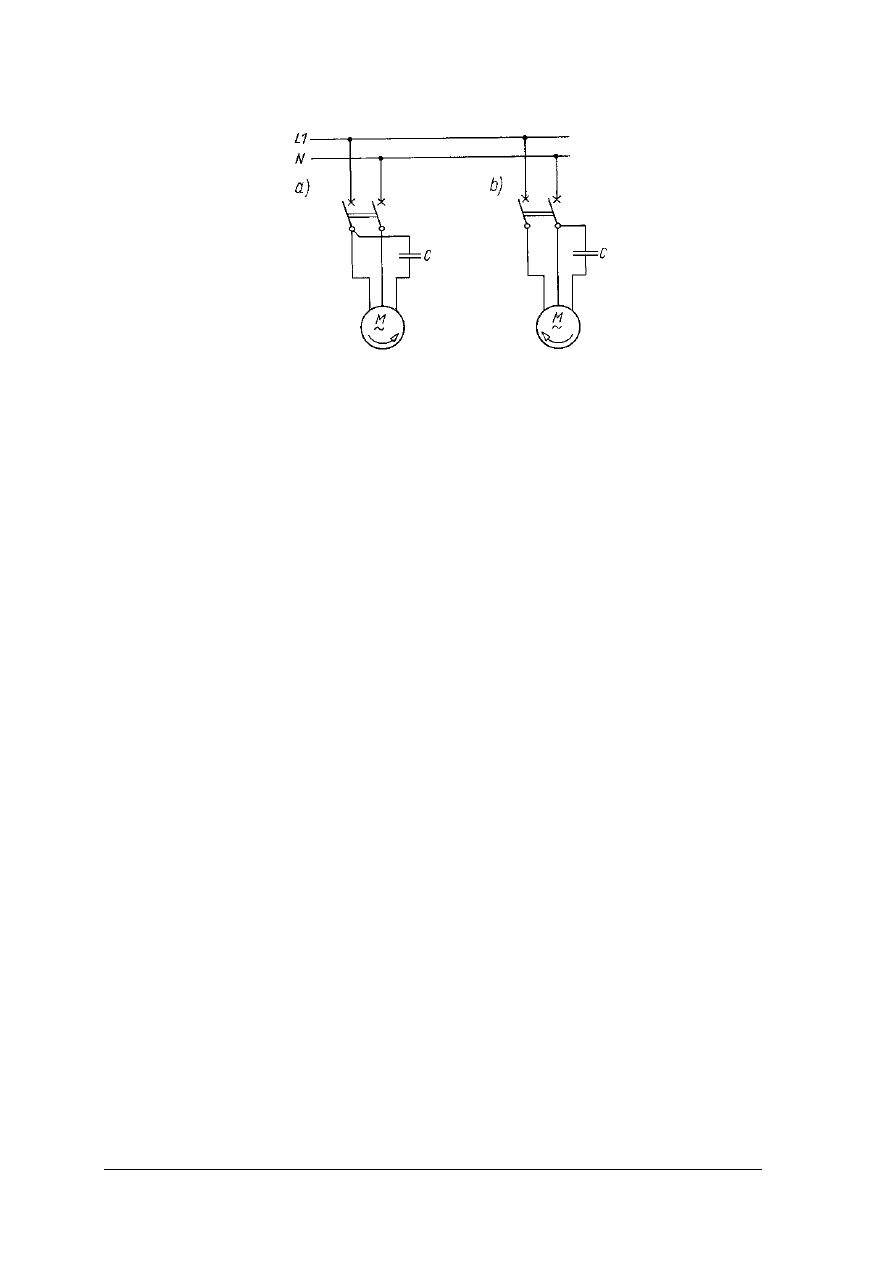
uzwojenia dołącza się kondensator. Silniki z kondensatorem rozruchowym wykazują znacznie
lepsze właściwości niż te z cieńszym przewodem. Uzwojenie rozruchowe musi być odłączone
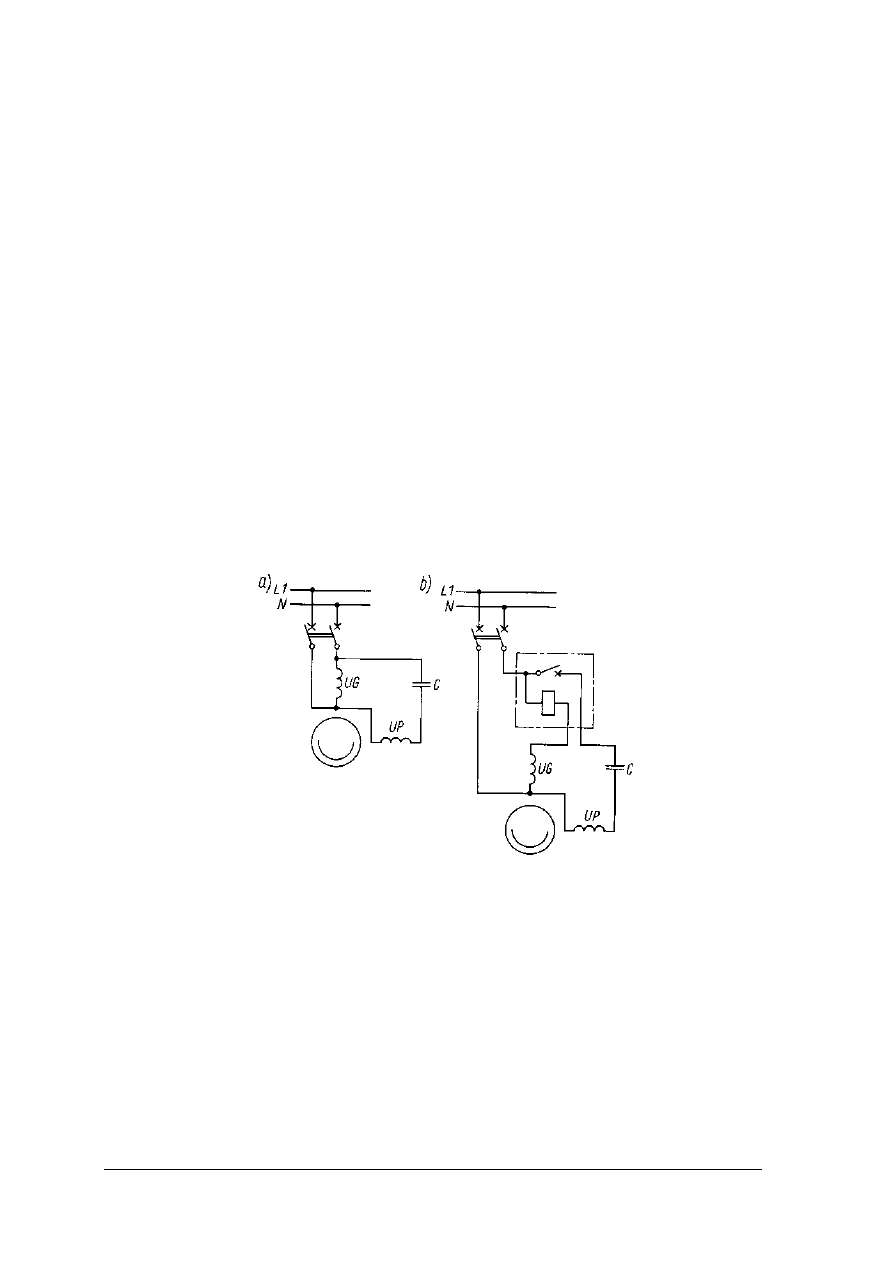
po rozruchu silnika. Sposoby podłączenia silnika przedstawia rysunek 1.
Rys. 1.
Schemat połączeń silnika indukcyjnego jednofazowego: a) z kondensatorem pracy, b)
z kondensatorem rozruchowym wyłączanym przez wyłącznik elektromagnetyczny [7,
s. 276]
Silnik komutatorowy jednofazowy stosuje się w wielu urządzeniach gospodarstwa
domowego oraz w wiertarkach. Zależnie od budowy silniki dzielimy na:
–
silniki komutatorowe jednofazowe szeregowe,
–
silniki komutatorowe jednofazowe repulsyjne.
W silnikach komutatorowych jednofazowych szeregowych strumień magnetyczny jest
wytwarzany przez uzwojenie wzbudzenia umieszczone na biegunach jawnych. Rdzeń bieguna
i nabiegunniki tworzą zwykle jedną całość z jarzmem stojana. Uzwojenie wzbudzenia jest
połączone szeregowo z uzwojeniem twornika za pośrednictwem szczotek i komutatora.
Silniki te często wykonuje się jako uniwersalne przeznaczone do pracy przy napięciu stałym
UG – uzwojenie główne,
UP – uzwojenie pomocnicze
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
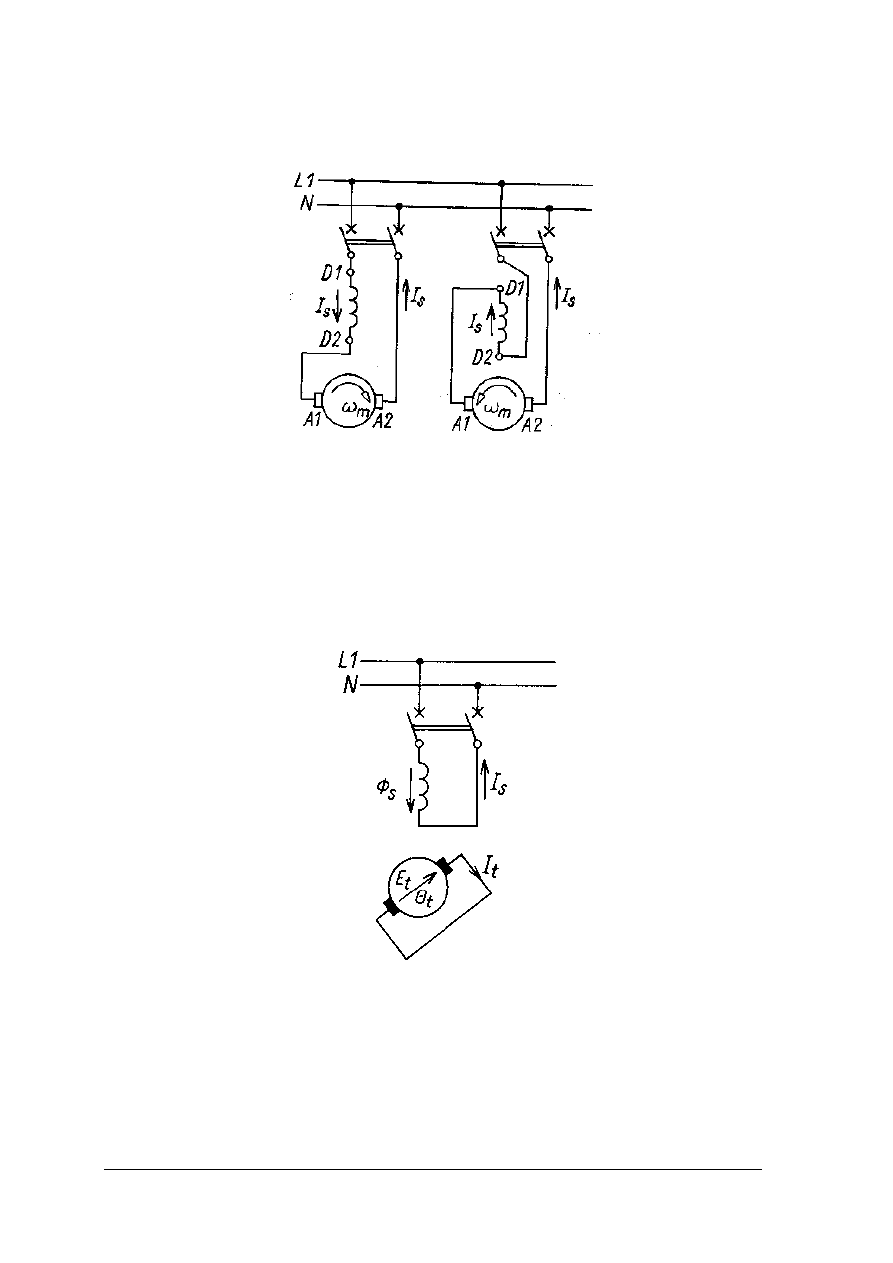
i przemiennym. Schemat połączeń silnika komutatorowego szeregowego jednofazowego
przedstawia rysunek 2.
Rys. 2.
Schemat
podłączeń
silnika
komutatorowego
szeregowego
jednofazowego przy lewym lub prawym kierunku wirowania [7, s.
304]
W silnikach komutatorowych jednofazowych repulsyjnych uzwojenie twornika znajduje
się na wirniku i jest połączone z komutatorem, po którym ślizgają się szczotki. Szczotki są
osadzone w obsadach. W silniku repulsyjnym szczotki są zwarte, zwierają, więc obwód
uzwojenia twornika. Wirnik jest umieszczony w cylindrycznym stojanie. W jego żłobkach
jest umieszczone uzwojenie jednofazowe, zasilane z sieci prądem przemiennym. Schemat
połączeń przedstawia rysunek 3.
Rys. 3. Schemat połączeń silnika komutatorowego jednofazowego repulsyjnego [7, s. 305]
Silniki trójfazowe małej mocy mogą pracować przy zasilaniu z sieci jednofazowej
(rys. 4). We wszystkich przypadkach kondensator C ma za zadanie przesunąć prąd w części
uzwojenia trójfazowego. Pojemność tego kondensatora można wyznaczyć według wzoru:
(
)
N
P
8
,
0
70
60
C
⋅
÷
≈
gdzie: P
N
−
moc znamionowa silnika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Dla zmiany kierunku obrotów silnika należy zmienić miejsce podłączenia kondensatora.
Rys. 4. Podłączenie silnika trójfazowego do sieci jednofazowej
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak działa silnik jednofazowy?
2. Jak zbudowany jest silnik komutatorowy?
3. Jak dzielimy silniki komutatorowe?
4. Gdzie znajdują zastosowanie silniki komutatorowe?
5. Jak podłączamy silnik trójfazowy do zasilania jednofazowego?
6. Od czego zależy kierunek obrotów silnika jednofazowego?
7. Jak dobieramy kondensator do silnika trójfazowego zasilanego z sieci jednofazowej?
4.1.3. Ćwiczenia
Ćwiczenie 1
Podłącz silnik indukcyjny jednofazowy do autotransformatora i regulując napięcie
zasilania wyznacz charakterystykę silnika. Wyznacz dla różnych wartości napięcia
zasilającego pobór prądu oraz obroty. Na podstawie wykonanych pomiarów wykonaj
wykresy:
a)
( )
I
f
U
=
,
b)
( )
U
f
n
=
.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć silnik na stanowisku pomiarowym zgodnie ze schematem przedstawionym
na rysunku 1 Poradnika dla ucznia,
2) odczytać mierzone wielkości dla biegu jałowego silnika,
3) wykonać charakterystyki silnika,
4) przeprowadzić analizę wykonanych obliczeń.
Wyposażenie stanowiska pracy:
–
silnik indukcyjny jednofazowy 0,37 kW i obroty 1410 obr./min,
–
autotransformator,
–
woltomierz,
–
miliamperomierz,
–
stroboskop,
–
arkusz pomiarowy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Ćwiczenie 2
Podłącz silnik komutatorowy zgodnie ze schematem przedstawionym na rysunku
3 poradnika. Wyznacz charakterystyki silnika dla biegu jałowego tak, jak w ćwiczeniu 1.
Na podstawie wykonanych pomiarów wykonaj wykresy:
a)
( )
I
f
U
=
,
b)
( )
U
f
n
=
.
Po wykonaniu pomiarów wyniki nanieś na wykres mierzonych wielkości w zależności
od napięcia zasilania.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć silnik na stanowisku pomiarowym zgodnie ze schematem przedstawionym
na rysunku 3 Poradnika dla ucznia,
2) odczytać mierzone wielkości dla biegu jałowego silnika,
3) wykonać wykresy charakterystyk,
4) przeprowadzić analizę wykonanych obliczeń.
Wyposażenie stanowiska pracy:
–
silnik komutatorowy szeregowy małej mocy 75 W i obroty 8500 obr./min,
–
autotransformator,
–
woltomierz,
–
miliamperomierz,
–
stroboskop,
–
arkusz pomiarowy.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić sposób podłączenia silnika jednofazowego?
2)
wykonać podłączenie silnika komutatorowego?
3)
podłączyć silnik trójfazowy jako jednofazowy?
4)
wykonać charakterystyki silników?
5)
przeanalizować wpływ zasilania na charakterystykę?
6)
określić jak zmieniamy kierunek wirowania silnika?
7)
określić co to jest silnik repulsyjny?
8)
dobrać kondensator do silnika trójfazowego?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
4.2. Podłączanie silnika trójfazowego do układu sterowania oraz
dobieranie zabezpieczenia
4.2.1. Materiał nauczania
Asynchroniczny silnik trójfazowy jest najczęściej stosowanym silnikiem prądu
przemiennego. W zależności od rodzaju wirnika rozróżniamy silniki klatkowe i silniki
pierścieniowe.
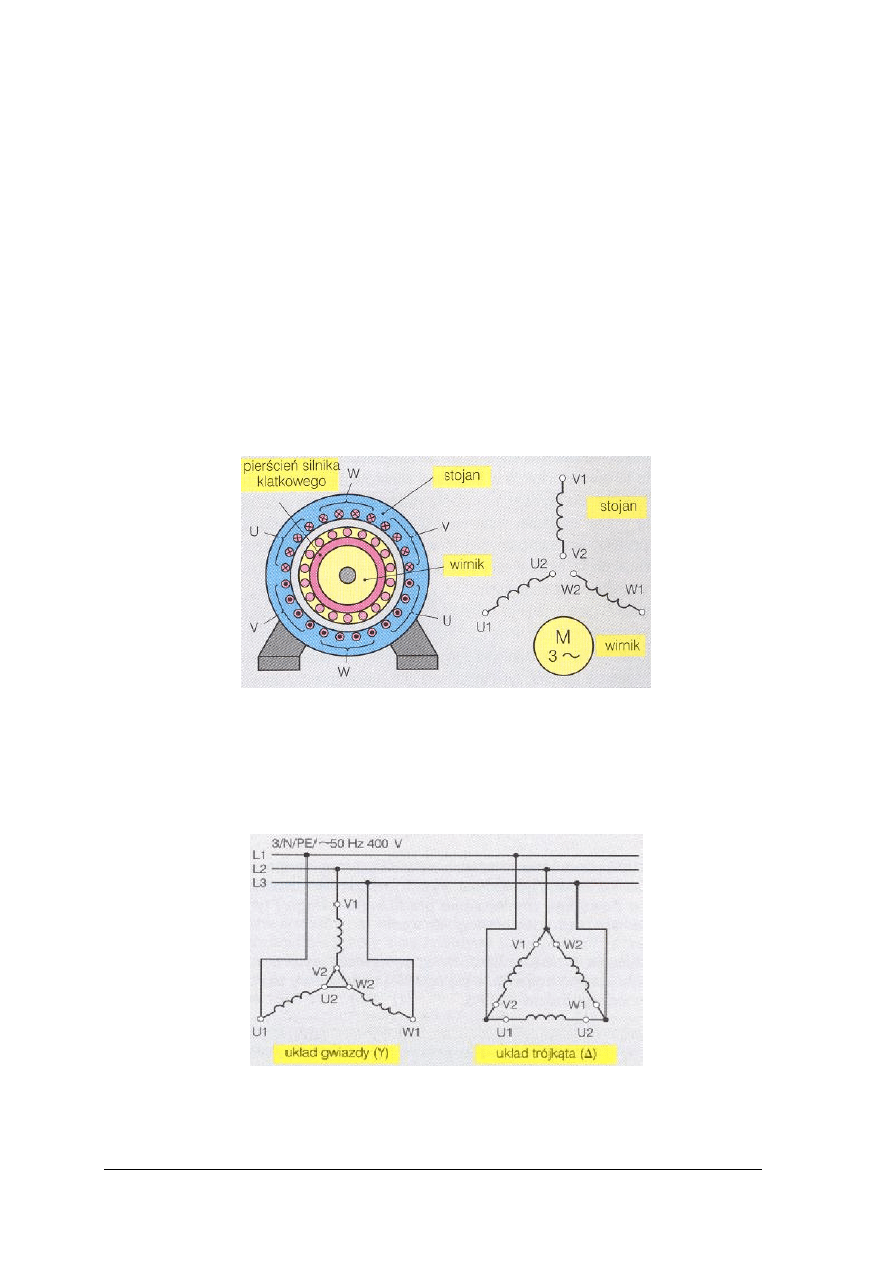
Silnik klatkowy (rys. 5) zbudowany jest z wirnika wykonanego w postaci walca
pakietowanego z blach ze żłobkami na aluminiowe lub miedziane pręty oraz czołowych
pierścieni wykonanych odpowiednio z aluminium lub miedzi. Części aluminiowe są
bezpośrednio połączone z pakietem blach. Ta część bez pakietu blach ma wygląd klatki. Pręty
klatki są ustawione ukośnie, przez co uzyskujemy równomierne obroty silnika. Stojan tego
silnika jest uzwojony, a początki i końce uzwojeń wyprowadzone do puszki zaciskowej.
Doprowadzając do silnika napięcie trójfazowe wytwarzamy w trzech fazach uzwojenia
stojana wirujące pole magnetyczne.
Rys. 5. Schemat budowy silnika asynchronicznego [5, s. 42]
Uzwojenia silnika
trójfazowego mogą być różnie rozmieszczone na obwodzie stojana;
opisuje to tzw. liczba biegunów silnika, która ma wpływ na wielkość obrotów znamionowych
silnika. Silniki asynchroniczne klatkowe można podłączyć do sieci trójfazowej w układzie
połączenia uzwojeń w gwiazdę lub w trójkąt (rys. 6). Sposób podłączenia zależny jest od
mocy silnika.
Rys. 6. Układ połączeń w gwiazdę i w trójkąt silników trójfazowych [5, s. 45]
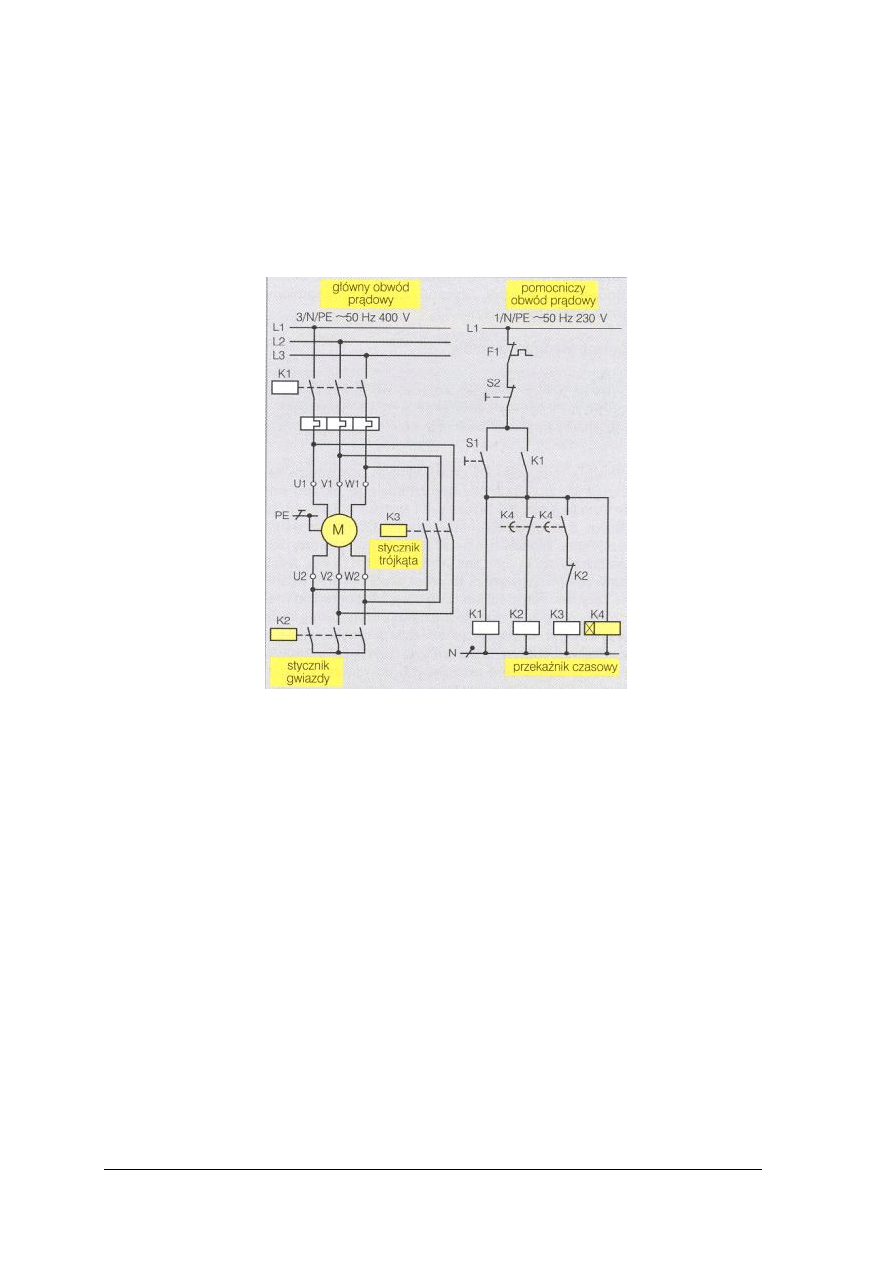
Trójfazowe silniki klatkowe o mocy ponad 4kW nie mogą być bezpośrednio włączane
do sieci w układzie połączenia w trójkąt ze względu na znaczne prądy rozruchu. Stosuje
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
się wtedy układ rozruchowy gwiazda–trójkąt, który realizowany jest przez zespół styczników
i przekaźników. Na rysunku 7 przedstawiono układ rozruchowy z zabezpieczeniem
termicznym. Wciskając przycisk S1 następuje uruchomienie stycznika K1, który podłącza
końce uzwojeń U1, V1, W1 do sieci oraz przez stycznik K2, który drugie końce uzwojeń
U2, V2, W2 łączy w układ gwiazdy (ROZRUCH). Jednocześnie stycznik K1 podaje napięcie
na przekaźnik czasowy K4, którego styk po nastawionym czasie opóźnienia wyłącza
K2 i włącza K3 łącząc układ w trójkąt. Taki układ zmniejsza prąd rozruchu i moment
rozruchu do jednej trzeciej.
Rys. 7. Stycznikowy układ rozruchu gwiazda–trójkąt [5, s. 45]
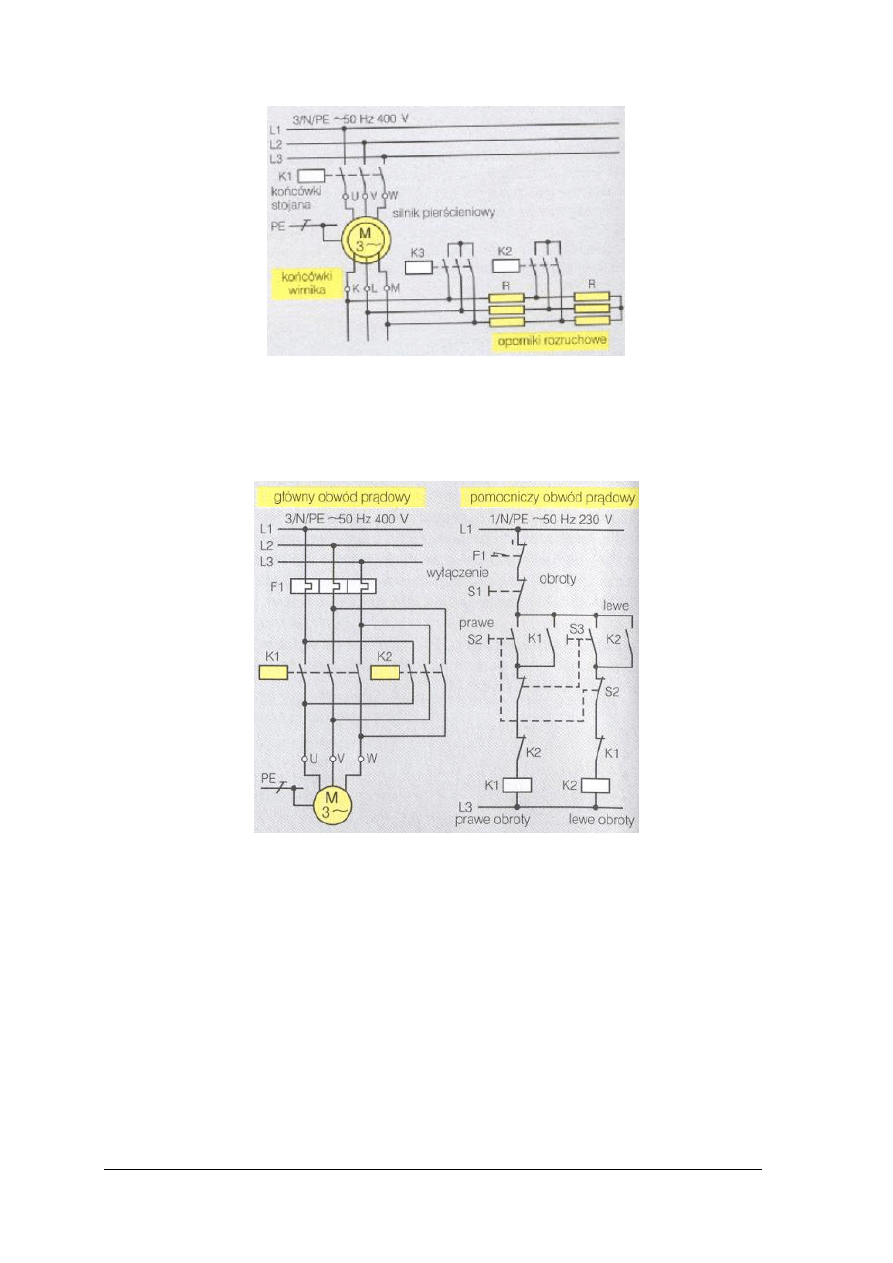
Silnik pierścieniowy zbudowany jest podobnie jak klatkowy z pakietów blach, z tym,
że w żłobkach pakietu znajduje się trzyczęściowe uzwojenie. To uzwojenie połączone jest
w gwiazdę. Pozostałe trzy końce uzwojeń są wyprowadzone na zewnątrz do końcówek
K, L, M przez trzy pierścienie ślizgowe i trzy szczotki. Podczas normalnej pracy silnika
końcówki K, L, M są zwarte; podczas rozruchu i sterowaniu obrotami silnika poprzez
te końcówki dołącza się dodatkowe rezystancje (rys. 8).
Silniki pierścieniowe włącza się do sieci trójfazowej z dodatkowymi rezystorami
w obwodzie wirnika, które zmniejszają prąd pobierany z sieci (rys. 8). Stycznik K1 włącza
silnik, a ze wzrostem obrotów bocznikowane są oporniki rozruchowe za pomocą styczników
K2 i K3.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Rys. 8. Układ rozruchowy silnika pierścieniowego [5, s. 46]
Zmianę kierunku obrotów wirnika w silnikach trójfazowych uzyskuje się poprzez zamianę
miejscami dwóch z trzech przewodów uzwojeń stojana. Zamianę tą realizuje się za pomocą
stycznikowego układu nawrotnego (rys. 9).
Rys. 9. Stycznikowy układ nawrotny [5, s. 46]
Bardzo ważnym elementem podłączenia silnika do układu zasilania trójfazowego
jest właściwie dobrane zabezpieczenie. Stosuje się następujące rodzaje zabezpieczeń:
1) zabezpieczenie zwarciowe przed skutkami zwarć,
2) zabezpieczenie przeciążeniowe przed przekroczeniem temperatury uzwojeń,
3) zabezpieczenie zanikowe przed znacznym obniżeniem napięcia lub zanikiem fazy.
Zabezpieczenie zwarciowe stosowane jest w każdej z faz zasilających silnik. Prąd
znamionowy zabezpieczenia zwarciowego bezpieczników lub wyzwalaczy powinien być jak
najmniejszy, ale tak dobrany, aby zabezpieczenie nie reagowało na prądy szczytowe
występujące w czasie normalnej pracy i rozruchu.
Zabezpieczenie przeciążeniowe powinno stanowić zabezpieczenie każdego silnika,
można jednak nie stosować tego zabezpieczenia w przypadkach:
1) silników, których prąd znamionowy jest mniejszy niż 4A,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
2) silników do pracy ciągłej o mocy nieprzekraczającej 10kW,
3) silników do pracy przerywanej.
W charakterze zabezpieczenia stosowane są wyzwalacze termiczne lub przekaźniki
cieplne. Prąd nastawczy wyzwalaczy nie powinien przekraczać 1,1 krotnej wartości prądu
znamionowego silnika.
Zabezpieczenie zanikowe powinno być stosowane do silników, dla których praca przy
znacznym obniżeniu napięcia nie jest możliwa, a zabezpieczenie przeciążeniowe nie jest
stosowane. Szczególnie zaleca się stosowanie tego typu zabezpieczenia do silników
pierścieniowych, których rozruch przy zwartym rozruszniku jest niedopuszczalny.
Prąd znamionowy wkładki bezpiecznikowej musi być tak dobrany, aby przy
największym prądzie szczytowym, występującym w zabezpieczanym obwodzie, wkładka nie
uległa przepaleniu. Wartości prądów rozruchowych silników w stosunku do prądów
znamionowych I
n
są następujące:
1) silniki pierścieniowe
−
1,7–2I
n
,
2) silniki klatkowe włączane bezpośrednio do sieci:
a) szybkobieżne (do 3000obr./min)
−
5,5–7,5I
n
,
b) wolnobieżne (poniżej 1000obr./min)
−
4–5I
n
,
3) silniki włączane przez przełącznik gwiazda – trójkąt:
a) szybkobieżne (do 3000obr./min)
−
1,8–2,5I
n
,
b) wolnobieżne (poniżej 1000obr./min) – 1,3–1,7I
n
.
Po dobraniu wkładki bezpiecznikowej według powyższych zależności należy sprawdzić
czy wkładka nie przepali się podczas występowania prądów szczytowych.
Wartości prądów znamionowych odczytujemy z kart katalogowych silników lub
z tabliczki znamionowej silnika. Na rysunku 9 przedstawiono układ podłączenia silnika
poprzez wyzwalacze termiczne jako zabezpieczenie przeciążeniowe. Doboru zabezpieczenia
zwarciowego i przeciążeniowego silników możemy również dokonać programem
komputerowym, który zainstalujemy jako program pod nazwą „suwak” ze strony
Internetowej www.elektryk.ovg.org (www.moeler.pl).
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak dzielimy silniki trójfazowe?
2. Jak zbudowany jest silnik klatkowy?
3. Jak zbudowany jest silnik pierścieniowy?
4. Od czego zależy prędkość obrotów wirnika?
5. Jak zmieniamy kierunek obrotów silnika?
6. Jakie są rodzaje zabezpieczeń silników?
4.2.3. Ćwiczenia
Ćwiczenie 1
Podłącz silnik asynchroniczny klatkowy do układu nawrotnego według rysunku
9 poradnika. Wykonaj to połączenie dla silnika o mocy 0,25 kW stosując dostępne styczniki.
Zastosuj układ połączenia uzwojeń silnika w gwiazdę oraz w trójkąt. Pomierz prądy rozruchu,
a wyniki umieść w tabeli.
Podczas włączania układu przestrzegaj przepisy bezpieczeństwa.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć silnik na stanowisku pomiarowym zgodnie ze schematem przedstawionym
na rysunku 9 Poradnika dla ucznia,
2) odczytać mierzone wielkości prądu dla różnych połączeń,
3) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
silnik asynchroniczny klatkowy 0,25 kW,
–
zestawy styczników 230 V, 50 Hz,
–
amperomierze prądu przemiennego,
–
przewody zasilające.
Ćwiczenie 2
Podłącz silnik asynchroniczny klatkowy do układu rozruchowego gwiazda–trójkąt
zgodnie z rysunkiem 7 poradnika dla ucznia stosując odpowiednie zabezpieczenie
przeciążeniowe i zwarciowe. Do pomiarów użyj dostępnego silnika większej mocy.
Przeanalizuj zasadę pracy układu podczas przełączania z układu gwiazda w układ trójkąta.
Podczas włączania układu przestrzegaj przepisy bezpieczeństwa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć silnik na stanowisku pomiarowym zgodnie ze schematem,
2) dobrać zabezpieczenia przeciążeniowe silnika,
3) ustawić parametry przekaźnika czasowego,
4) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
silnik asynchroniczny klatkowy,
–
zestawy styczników 230 V, 50 Hz,
–
elementy zabezpieczeń przeciążeniowych (wyzwalacze lub inne dostępne),
–
przekaźniki,
–
przekaźnik czasowy,
–
przewody zasilające.
Ćwiczenie 3
Odczytaj dane z tabliczek znamionowych różnych silników. Na ich podstawie dobierz
wymagane zabezpieczenia. Dokonaj przeglądu parametrów silników z dostępnych katalogów
silników asynchronicznych. Odczytane dane silników przeanalizuj z danymi katalogowymi.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) odczytać dane katalogowe silników trójfazowych,
2) dobrać zabezpieczenia przeciążeniowe silnika,
3) przeprowadzić analizę wykonanych obliczeń.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Wyposażenie stanowiska pracy:
–
silniki asynchroniczne różnych typów,
–
karty katalogowe silników,
–
karty katalogowe elementów zabezpieczeń silników.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić sposób podłączenia silnika klatkowego?
2)
wykonać podłączenie silnika klatkowego?
3)
podłączyć silnik trójfazowy pierścieniowy?
4)
dobrać zabezpieczenie silnika?
5)
określić typ silnika z tabliczki znamionowej?
6)
określić rodzaje zabezpieczeń silników?
7)
dokonać analizy charakterystyk silnika?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.3. Regulowanie i łączenie mikrosilników
4.3.1. Materiał nauczania
Do grupy mikrosilników zaliczają się silniki krokowe zwane często skokowymi,
mikrosilniki bezszczotkowe i komutatorowe prądu stałego. Silniki krokowe są bardzo często
stosowane ze względu na możliwości łatwego sterowania nimi poprzez układy komputerowe.
Poniżej przedstawiono typy tych silników oraz sposób ich działania.
Obecnie istnieje duża
liczba różnorodnych typów silników krokowych i jest możliwe pojawienie się nowych.
Rys. 10.
Podział silników krokowych
Silniki o zmiennej reluktancji
Oprócz szeroko stosowanych jednosegmentowych silników krokowych często bywają
stosowane silniki wielosegmentowe. Wśród jednosegmentowych silników krokowych
o wirniku reluktancyjnym rozróżnić można takie, w których na jeden biegun stojana przypada
jeden ząb wirnika i takie, w których na jeden biegun stojana przypada kilka zębów wirnika.
Pod pojęciem reluktancja – czyli opór magnetyczny należy rozumieć stosunek siły
magnetomotorycznej, doprowadzonej do obwodu magnetycznego, do wytwarzanego w nim
strumienia magnetycznego.
Działanie silnika skokowego o wirniku reluktancyjnym opiera się na wykorzystaniu
momentu reluktancyjnego. Silnik ten składa się z rotora o wielu zębach wykonanego
z miękkiej stali i uzwojonego stojana. Kiedy uzwojenia stojana są zasilane prądem stałym,
bieguny namagnesowują się. Ruch pojawia się na skutek przyciągania zębów rotora przez
zasilane bieguny stojana (rys. 11).
Rys. 11.
Powstawanie momentu reluktancyjnego [opracowanie własne]
Silniki o magnesach stałych
Silniki krokowe o magnesach stałych (rys. 12) mogą być wykonane w wersji
jednosegmentowej i wielosegmentowej. Silnik jednosegmentowy może mieć na wirniku
Elektryczne
silniki skokowe
Wirujące
Liniowe
O wirniku
reluktancyjnym
O magnesach
trwałych
Hybrydowy
O zmiennej
reluktancji
Hybrydowy
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
podobnie do klasycznej maszyny synchronicznej bieguny jawne – czyli jednoznacznie
określone lub utajone – zmieniające się z obrotem wirnika. Wirnik silnika stanowią magnesy
trwałe. Silnik tego typu jest tani, charakteryzuje się niską rozdzielczością o typowych
wartościach kąta 7,5
o
−
15
o
tj. 24
−
48 kroków na obrót. Rotor silnika nie posiada zębów, lecz
jest namagnesowany naprzemiennie biegunami N i S tak, iż bieguny te są usytuowane w linii
prostej równoległej do osi rotora. Namagnesowane bieguny rotora wpływają na zwiększenie
indukcji magnetycznej, dlatego silnik z magnesem trwałym w porównaniu z silnikami
o zmiennej reluktancji mają lepszą charakterystykę momentową.
Rys. 12.
Silnik krokowy o magnesach trwałych z biegunami: a) jawnymi, b) utajonymi
jednosegmentowy
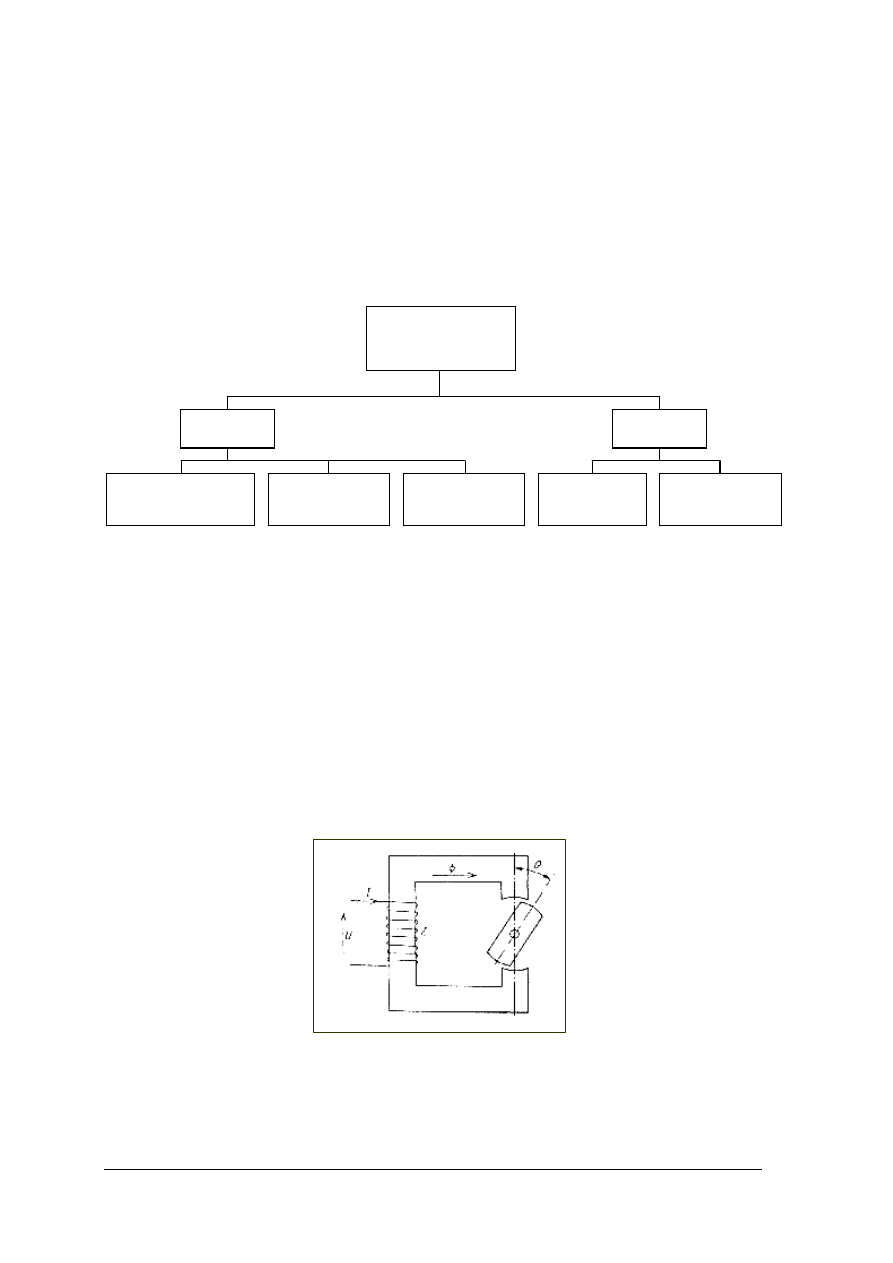
Silniki hybrydowe
Są najnowocześniejszym typem silników krokowych. Silnik hybrydowy jest bardziej
kosztowny niż silnik z magnesem trwałym, ale cechuje się za to lepszymi parametrami:
rozdzielczości i szybkości. Zasada działania silnika opiera się na tym, że magnes trwały
umieszczony na wirniku lub na stojanie wytwarza jednako biegunowy strumień magnetyczny,
który zamyka się w obwodzie magnetycznym: stojan – szczelina powietrzna
−
wirnik. Po
zasileniu uzwojenia stojana impulsem sterującym, wzbudzony strumień magnetyczny pod
jednym biegunem stojana dodaje się do strumienia magnesów trwałych, pod drugim zaś
odejmuje się. Wirnik zostaje wprowadzony w ruch tak, by osie zębów stojana i wirnika
bieguna o strumieniu wzmacniającym pole magnetyczne pokryły się. Silnik hybrydowy łączy
zalety silnika ze zmienną reluktancją i silnika z magnesem stałym. Rotor silnika ma wiele
zębów i posiada osiowo namagnesowane magnesy umieszczone koncentrycznie wokół osi.
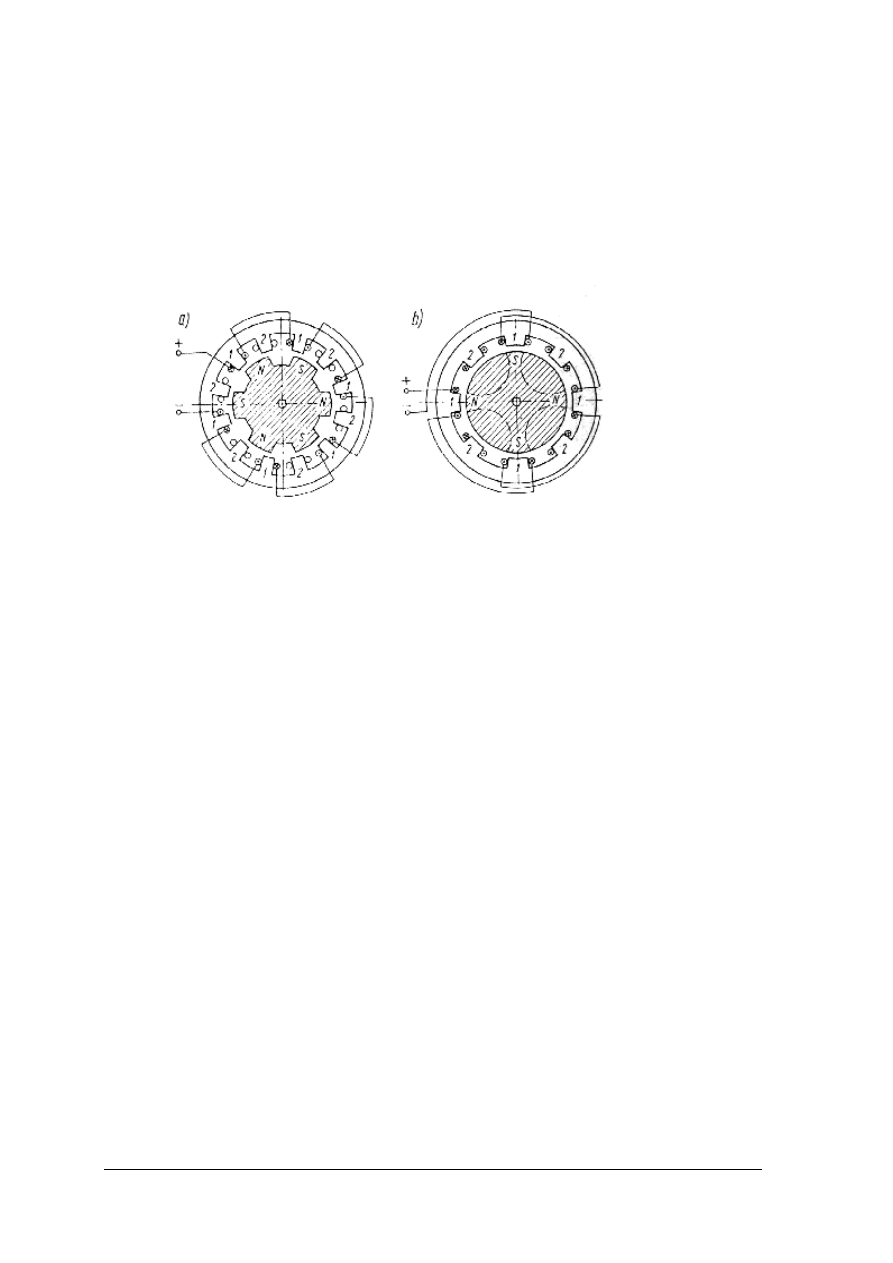
Silniki prądu stałego
W zależności od sposobu wytworzenia przez stojan pola magnetycznego
rozróżnia się
silniki bocznikowe, obcowzbudne, ze wzbudzeniem magnesami trwałymi i wzbudzane
szeregowo. Układy połączeń silników prądu stałego przedstawia rysunek 13.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Rys. 13. Układy połączeń silników prądu stałego [5, s. 53]
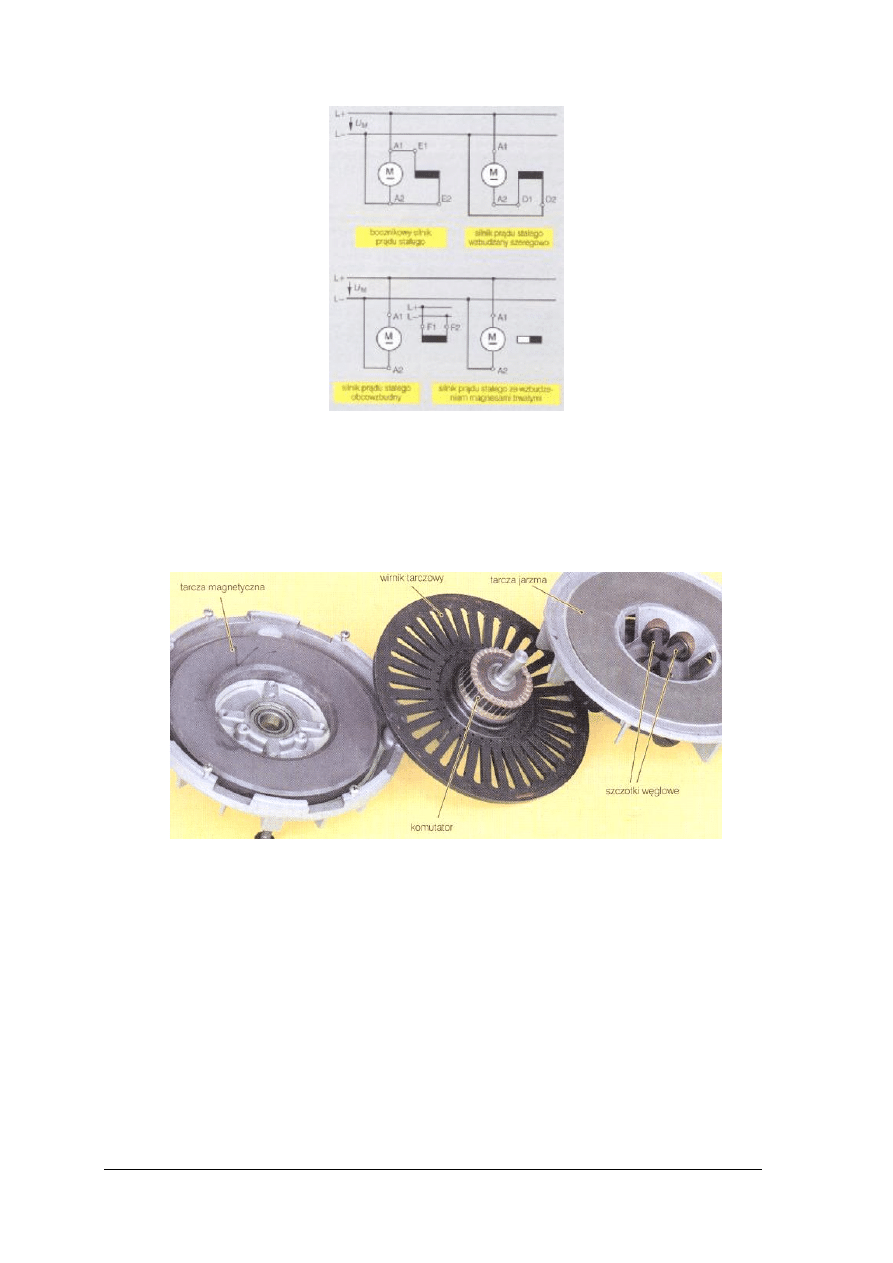
Silnik prądu stałego ma w stojanie uzwojenie wytwarzające strumień magnetyczny od
jednego nabiegunnika do drugiego lub nabiegunniki w postaci magnesów trwałych. Wirnik
posiada uzwojenie ułożone na ogół w żłobkach. Silniki prądu stałego wzbudzane szeregowo
mają duży moment rozruchowy. Szczególną odmianę silników prądu stałego stanowią silniki
z wirnikami tarczowymi (rys. 14). Silniki te charakteryzują się dużą szybkością reakcji dzięki
małej masie wirnika.
Rys. 14.
Silnik prądu stałego z wirnikiem tarczowym [5, s. 54]
Silniki bezszczotkowe typu BLDC
Bezszczotkowe silniki DC są znane od bardzo dawna, jednak ich powszechne
zastosowanie umożliwiły dopiero tanie scalone sterowniki impulsowe. Budowa silnika
z wirującym magnesem jest „odwróceniem” budowy silnika komutatorowego z magnesem
trwałym. Uzwojenia znajdują się w stojanie, a wirnik wykonany jest z odpowiednio
ukształtowanego magnesu. W terminologii angielskiej używa się dla silników
bezszczotkowych akronimu BLDC, (ang. Brushless DC Motor). Ze względu na liczbę
uzwojeń, wyróżniamy silniki bezszczotkowe 2
−
fazowe i 3
−
fazowe, natomiast w zależności
od sposobu zasilania uzwojeń silniki unipolarne i bipolarne. Parametry mechaniczne
bezszczotkowych silników DC są porównywalne z silnikami komutatorowymi z magnesem
trwałym
−
podobna moc i moment obrotowy przy zbliżonych wymiarach i masie. Istotnymi
ich zaletami są:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
–
wysoka trwałość, ograniczona praktycznie wytrzymałością łożysk wirnika,
–
możliwość bardzo precyzyjnej regulacji obrotów – dzięki zaawansowanym układom
sterowników można sterować kątem obrotu wirnika podobnie jak w silnikach
krokowych.
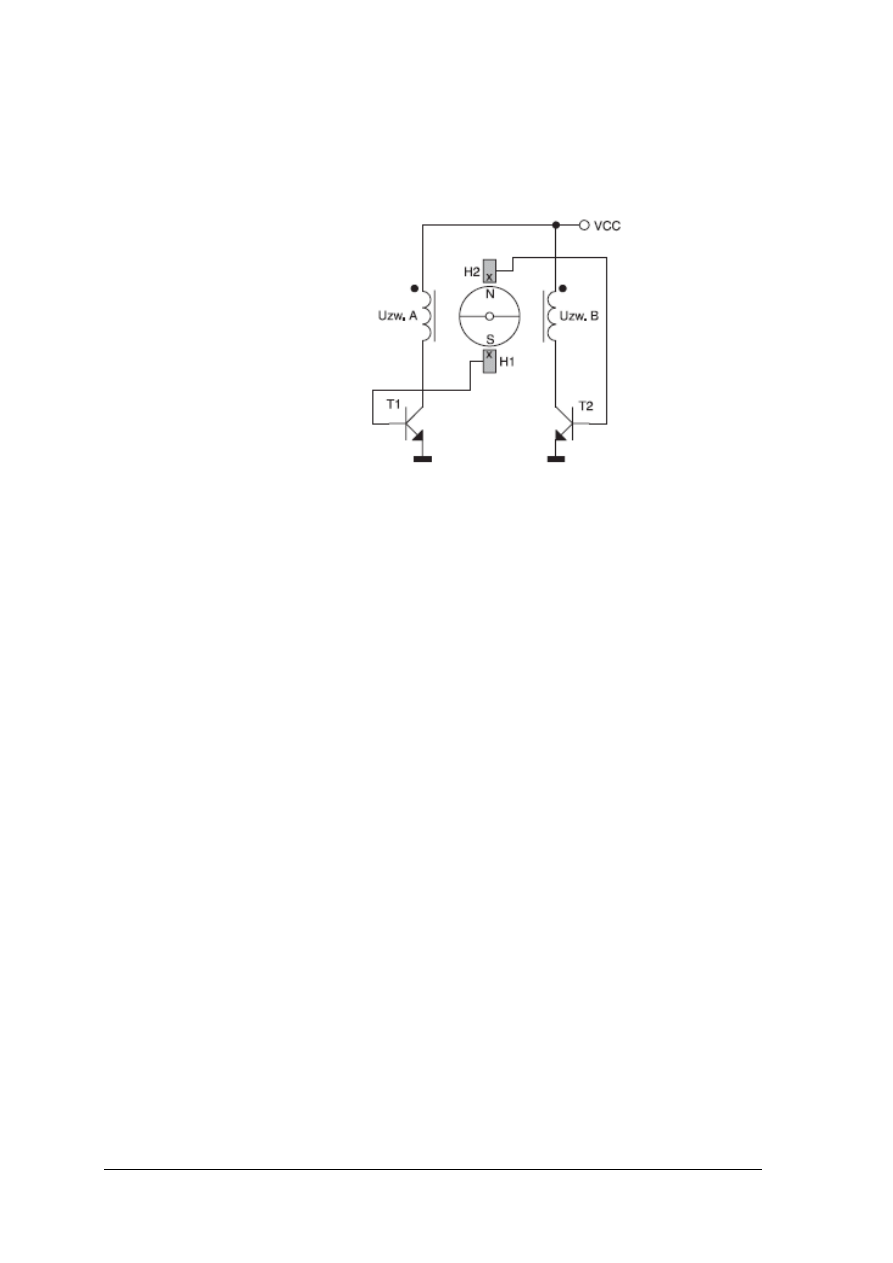
Na rysunku 15 przedstawiono przykład sterowania silnikiem BLDC.
Rys. 15.
Zasada działania i sterowanie silnikiem dwufazowym BLDC
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak dzielimy silniki krokowe?
2. Jak działa silnik krokowy reluktancyjny?
3. Jak działa silnik skokowy o magnesach trwałych?
4. Jakie znasz silniki prądu stałego?
5. Jak zbudowany jest silnik prądu stałego?
6. Z jakich elementów zbudowany jest silnik tarczowy?
7. Co to jest silnik BLDC?
4.3.3. Ćwiczenia
Ćwiczenie 1
Podłącz silnik krokowy reluktancyjny według schematu do układu sterowania.
Zmieniając częstotliwość impulsów sterujących doprowadzonych do sterownika wyznacz
charakterystykę silnika na hamowni ciernej jako zależność momentu hamującego w funkcji
częstotliwości.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
dynamometry
Zasilanie 24VDC
sznurek
tarcza na wałku
silnika
r
Impulsy
z generatora
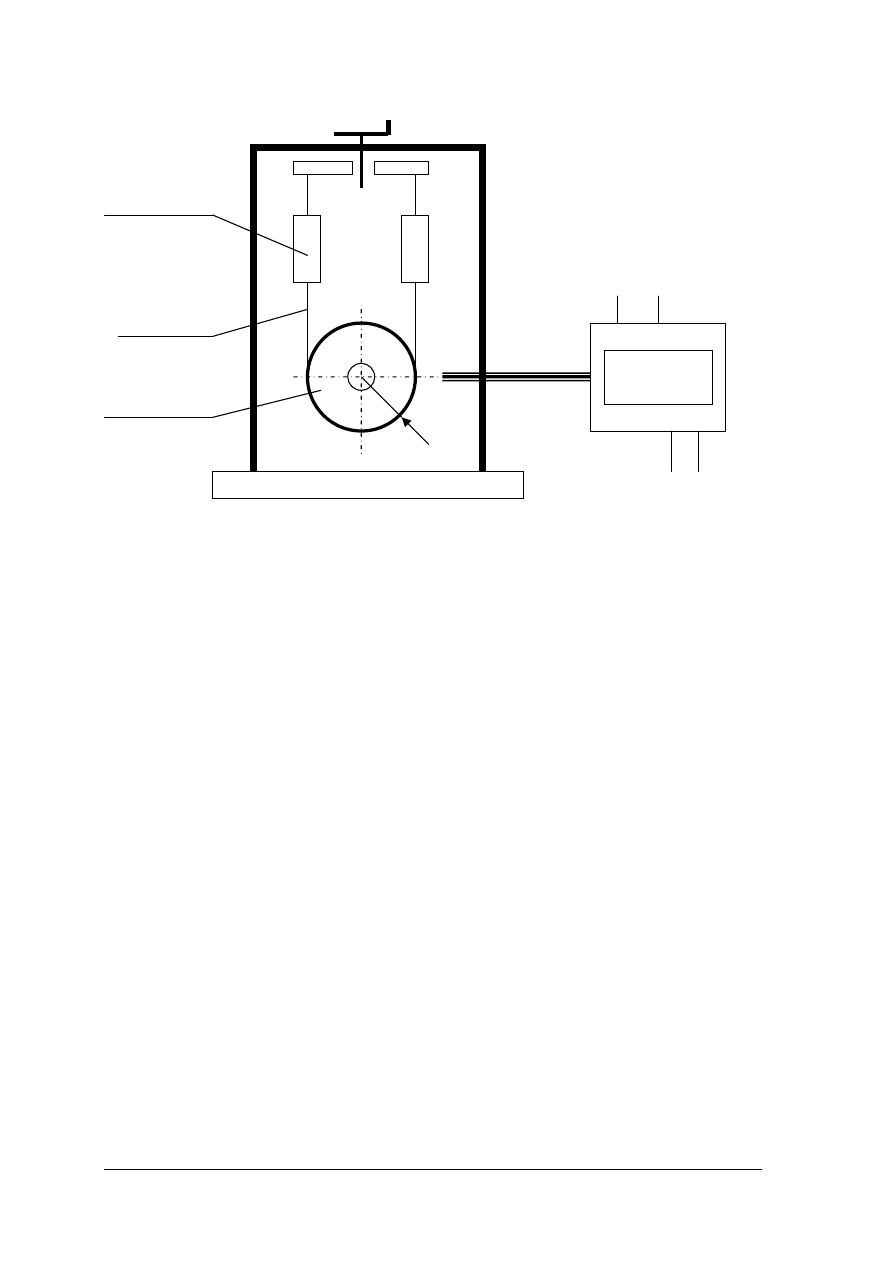
Rys. do ćwiczenia 1. Stanowisko do badań silnika krokowego na hamowni ciernej
Moment obrotowy na tej hamowni wyznaczamy według wzoru:
(
)
r
F
F
M
2
1
.
obr
⋅
−
=
gdzie: F
1
−
siła z pierwszego dynamometru,
F
2
−
siła z drugiego dynamometru,
r
−
promień tarczy na wałku silnika.
Charakterystykę należy wyznaczyć dla obrotów prawych i lewych zadając różne
częstotliwości na sterownik silnika. Zmieniając naciąg sznurka hamowni możemy wyznaczyć
charakterystyki momentu obrotowego w funkcji częstotliwości impulsów z generatora.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć silnik na stanowisku pomiarowym zgodnie ze schematem,
2) ustawić zakres pomiaru momentu dynamometrami,
3) zmieniając częstotliwość z generatora odczytać siły z dynamometrów,
4) obliczyć momenty dla różnych prędkości silnika krokowego,
5) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
silnik krokowy,
–
zasilacz prądu stałego 24VDC,
–
hamownia silnika krokowego,
–
generator impulsów prostokątnych z regulowaną częstotliwością,
–
przewody zasilające.
Sterownik
silnika

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Ćwiczenie 2
Podłącz silnik bocznikowy prądu stałego do zasilacza z regulowanym napięciem
i wyznacz charakterystyki silnika:
a)
( )
I
f
U
=
,
b)
( )
U
f
n
=
.
gdzie: U – napięcie zasilania, I – pobór prądu nieobciążonego silnika, n – obroty silnika.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć silnik na stanowisku pomiarowym,
2) zmieniając napięcie zasilania wyznaczyć charakterystyki,
3) zapisać wyniki pomiarów do tabeli,
4) wykonać charakterystyki,
5) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
silnik bocznikowy prądu stałego,
–
zasilacz prądu stałego z regulowanym napięciem,
–
tachometr lub stroboskop,
–
amperomierz prądu stałego,
–
woltomierz prądu stałego,
–
przewody zasilające.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić rodzaje silników krokowych?
2)
wykonać podłączenie silnika krokowego?
3)
podłączyć silnik prądu stałego?
4)
wykonać charakterystyki silnika prądu stałego?
5)
określić typ silnika z tabliczki znamionowej?
6)
odczytać parametry silnika z tabliczki znamionowej?
7)
określić zastosowanie silników BLDC?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
4.4. Wykonywanie
połączenia
siłownika
pneumatycznego
i hydraulicznego z układem sterującym
4.4.1. Materiał nauczania
W układach automatyki siłownikami nazywamy elementy napędowe służące
do nastawiania położenia zaworów, przepustnic lub innych elementów nastawczych.
W zależności od rodzaju zasilania siłowniki dzielimy na pneumatyczne, hydrauliczne,
elektryczne i mieszane.
Istnieją dwa podstawowe rodzaje siłowników pneumatycznych: membranowe i tłokowe.
W obu rodzajach występują siłowniki ze sprężyną zwrotną i bezsprężynowe. Typowy
siłownik membranowy o działaniu prostym P i odwrotnym R z zakładów POLNA S.A.
przedstawiono na rysunku 16.
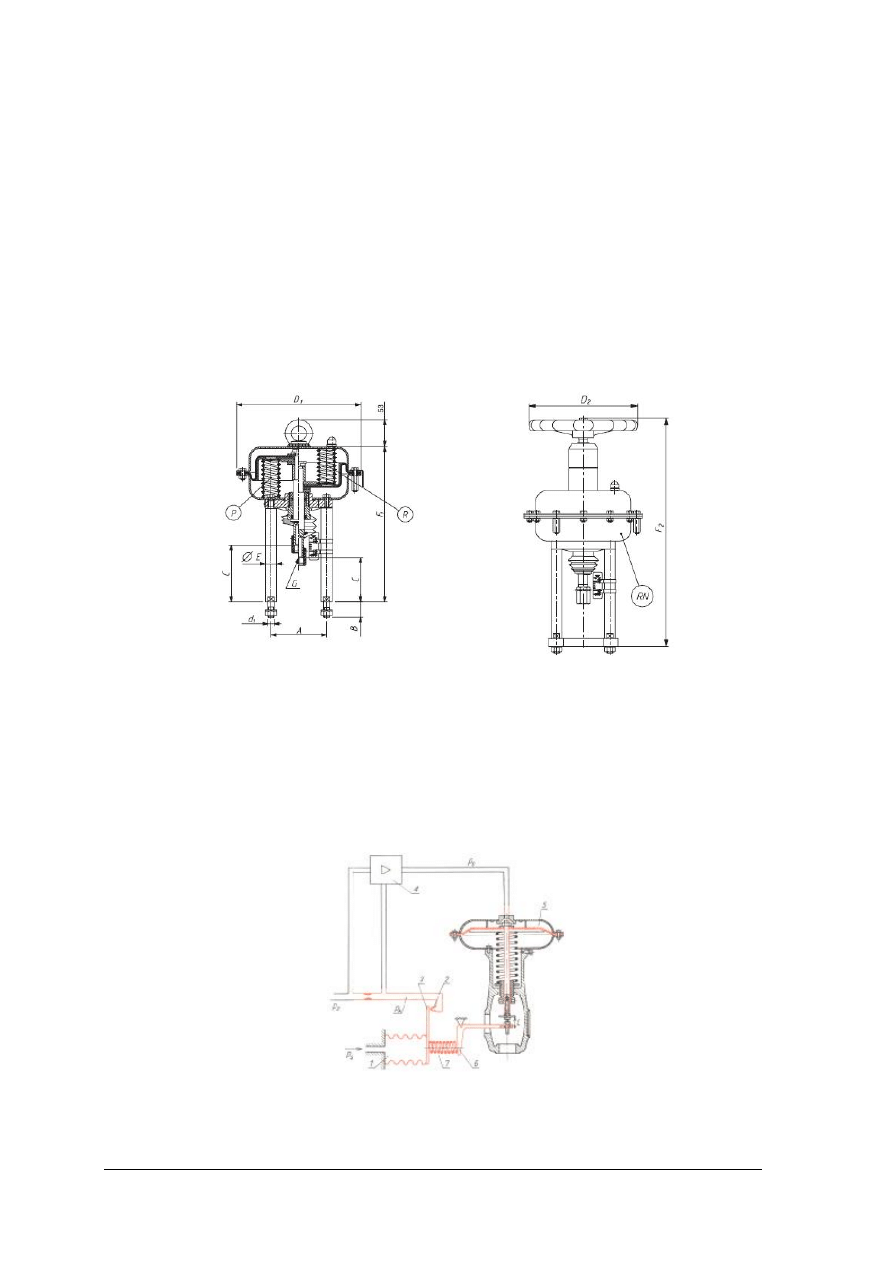
Rys. 16. Siłowniki pneumatyczne membranowe Przedstawione wymiary na
rysunku należy kojarzyć z katalogiem siłowników membranowych
[POLNA S.A.]
Działanie P oznacza, że wzrost ciśnienia sterującego powoduje wysuwanie trzpienia
siłownika, a działanie R oznacza, że wzrost ciśnienia sterującego powoduje wciąganie
trzpienia. Siłownik po prawej stronie wyposażony jest w dodatkowy napęd ręczny
RN. Siłowniki membranowe wyposaża się często w ustawniki pozycyjne sterowane sygnałem
pneumatycznym 20...100kPa lub elektrycznym 4...20 mA. Zadaniem ustawnika
pozycyjnego
jest utrzymywanie trzpienia siłownika w pozycji proporcjonalnej do sygnału
zadanego.
Rys. 17.
Siłownik pneumatyczny membranowy z ustawnikiem pozycyjnym
pneumatycznym: 1 – mieszek sprężysty, 2 – dysza, 3 – przysłona, 4 –
wzmacniacz, 5 – siłownik, 6 – dźwignia, 7 – sprężyna, 8 – stabilizator
ciśnienia [3, s. 141]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
Zastosowanie ustawnika pozycyjnego daje kilkunastokrotne zmniejszenie histerezy
i wpływu sił obciążenia na położenie trzpienia. Na rysunku 17 przedstawiono siłownik
pneumatyczny z ustawnikiem pozycyjnym pneumatycznym. Siłowniki membranowe są
sterowane z regulatorów pneumatycznych lub elektrycznych. Działanie regulatorów poznałeś
w jednostce modułowej 731[01].Z2.01.
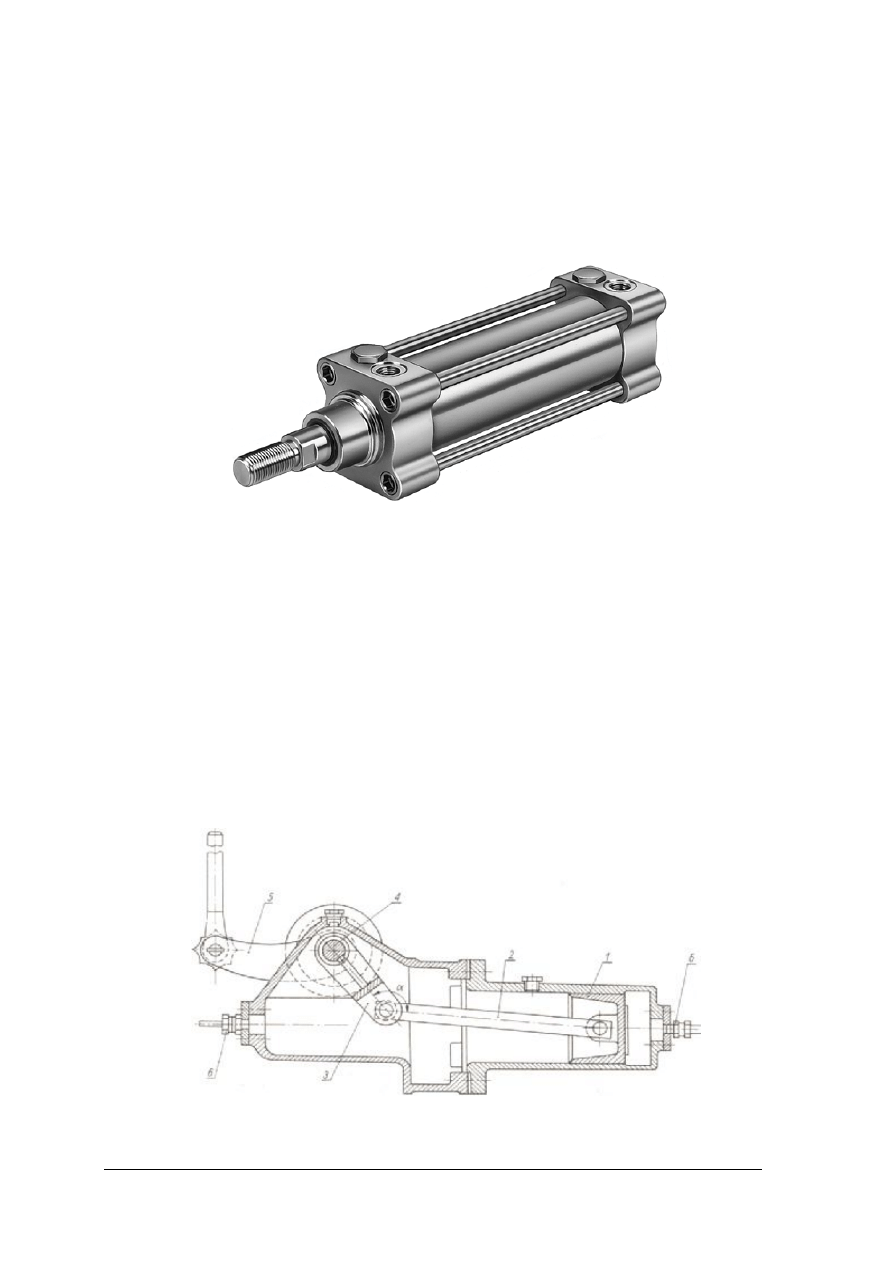
Siłowniki pneumatyczne tłokowe są bardziej rozpowszechnione jako siłowniki
w układach sterowania. Na rysunku 18 przedstawiony jest siłownik tłokowy firmy FESTO.
Rys. 18.
Siłownik pneumatyczny tłokowy [Festo]
Jest to siłownik dwustronnego działania
−
to znaczy doprowadzenie ciśnienia sterującego
nad tłok powoduje wysuw tłoczyska, a pod tłok wsuw tłoczyska. Inną odmianą są
siłowniki
tłokowe jednostronnego działania, w których ciśnienie doprowadzone jest z jednej strony
tłoka, a ruch powrotny wykonuje sprężyna.
Siłowniki hydrauliczne
Wykonywane są najczęściej jako tłokowe w dwóch odmianach: proste i korbowe.
Odmianą siłownika hydraulicznego jest silnik hydrauliczny obrotowy stosowany głównie
w
napędach obrabiarek. Siłownik hydrauliczny prosty jest siłownikiem działania
dwustronnego. Jego budowa jest podobna do siłownika pneumatycznego. Różnice wynikają
z innych ciśnień roboczych oraz wymagań dotyczących szczelności. W siłownikach
korbowych (rys. 19) ruch posuwisto – zwrotny tłoka przenoszony jest za pośrednictwem
korbowodu na korbę i zamieniany na obrót korby.
Rys. 19. Siłownik hydrauliczny korbowy: 1 – tłok, 2 – korbowód, 3 – korba, 4 – oś,
5 – korba zewnętrzna, 6 – doprowadzenie przewodów sterujących [3, s. 147]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
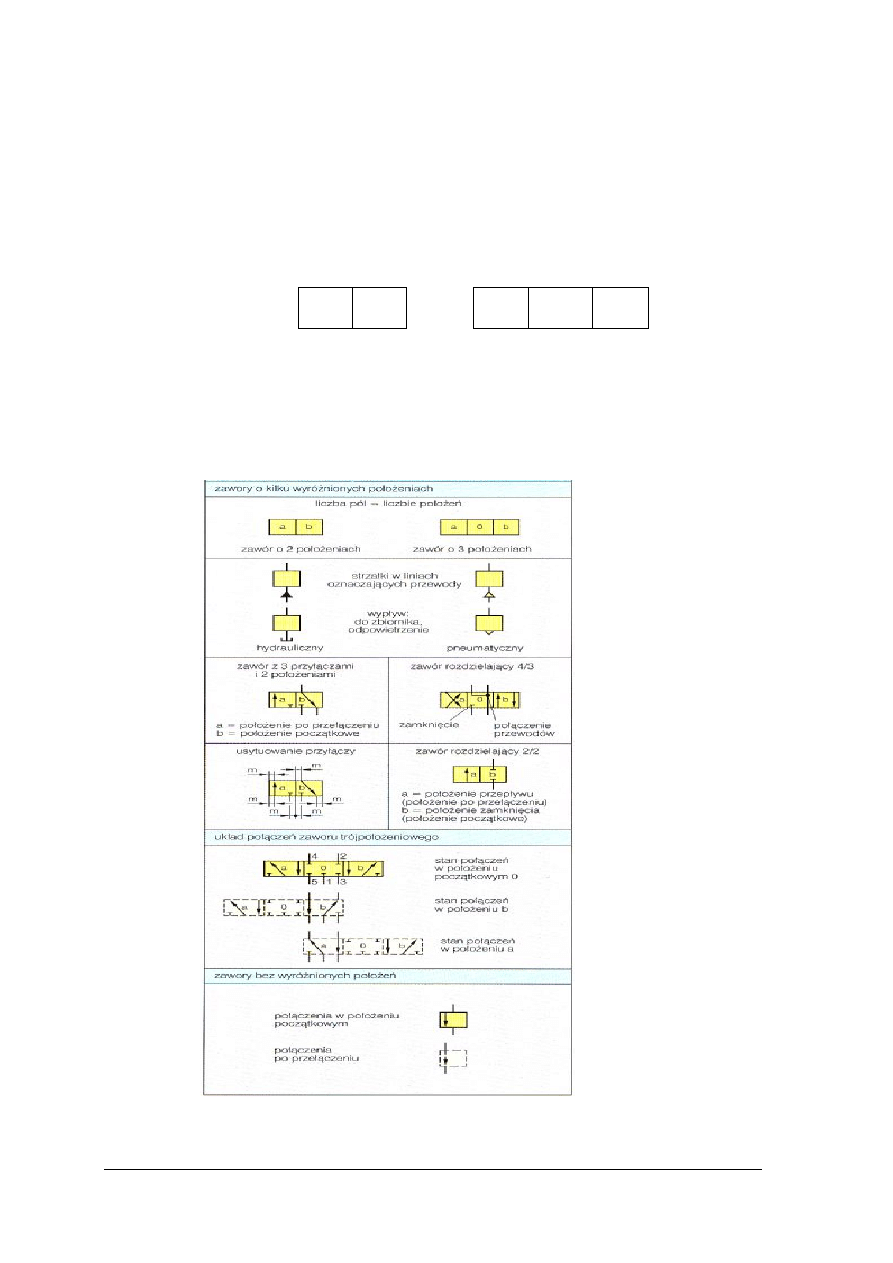
Sterowanie siłownikami pneumatycznymi i hydraulicznymi
Do sterowania siłownikami pneumatycznymi i hydraulicznymi służą zawory. Oznaczenie
symboliczne zaworów hydraulicznych i pneumatycznych jest takie same, różni je w praktyce
czynnik roboczy, którym są zasilane i pełnione funkcje w układzie sterowania. Oznaczenia
poszczególnych typów elementów sterujących są znormalizowane według normy
PN ISO 1219–1:1994. Zawory mogą sterować kierunkiem przepływu, ciśnieniem
i natężeniem medium roboczego. Zawory sterujące przedstawione są symbolicznie w postaci
ułożonych obok siebie pól (bloków). Liczba pól jest równa liczbie położeń zaworu (rys. 20).
zawór o 2 położeniach
zawór o 3 położeniach
Rys. 20. Stany położeń zaworu sterującego
Zawory mogą przyjmować różne stany położeń w wyniku ich
sterowania. Położenia
zaworu oznaczane są literami a, b, 0. Wewnątrz pól połączenia przedstawione są w postaci
linii, a kierunki przepływu w postaci strzałek. Symbolika poszczególnych typów zaworów
przedstawiona jest na rysunku 21.
Rys. 21. Symbolika zaworów z przyłączami [5, s. 75]
a b
a 0 b
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
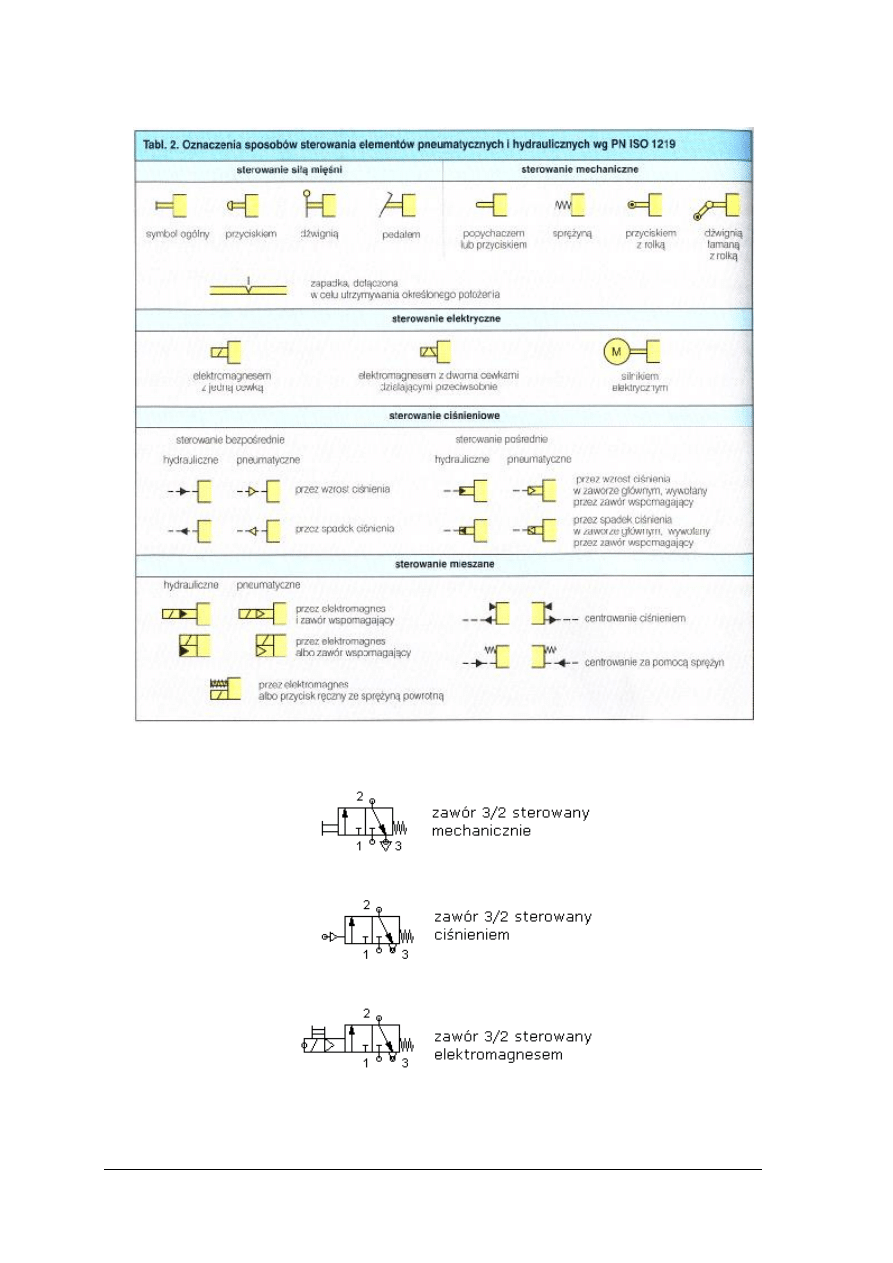
Zawory mogą być sterowane różnymi elementami (rys. 22, 23, 24, 25).
Rys. 22. Wybrane metody sterowania zaworami [5, s. 76]
Rys. 23. Przykłady połączeń zaworu z elementami sterującymi [opracowanie własne]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
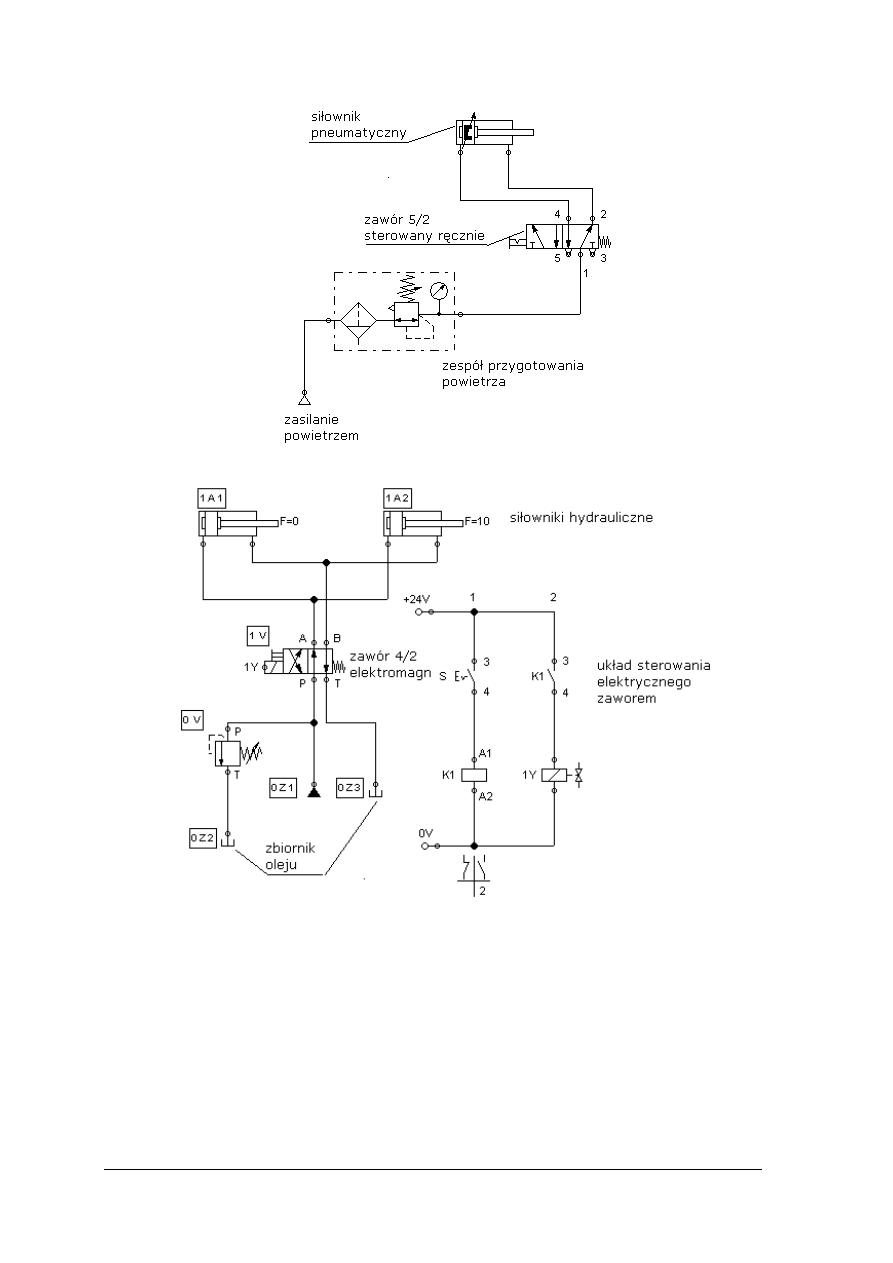
27
Rys. 24. Sterowanie siłownikiem pneumatycznym dwustronnego działania [opracowanie własne]
Rys. 25. Sterowanie siłownikami hydraulicznymi prostymi dwustronnego
działania poprzez zawór elektromagnetyczny 4/2 [opracowanie
własne]
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak dzielimy siłowniki pneumatyczne?
2. Kiedy stosujemy siłownik membranowy?
3. Jaka jest różnica między siłownikiem o działaniu prostym, a odwrotnym?
4. Do czego służy ustawnik pozycyjny?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
5. Czym różni się siłownik tłokowy pneumatyczny od hydraulicznego?
6. Czym sterowane są siłowniki tłokowe?
7. Co oznacza zawór 3/2 oraz 4/2?
8. Jakimi elementami mogą być sterowane zawory sterujące siłownikami?
4.4.3. Ćwiczenia
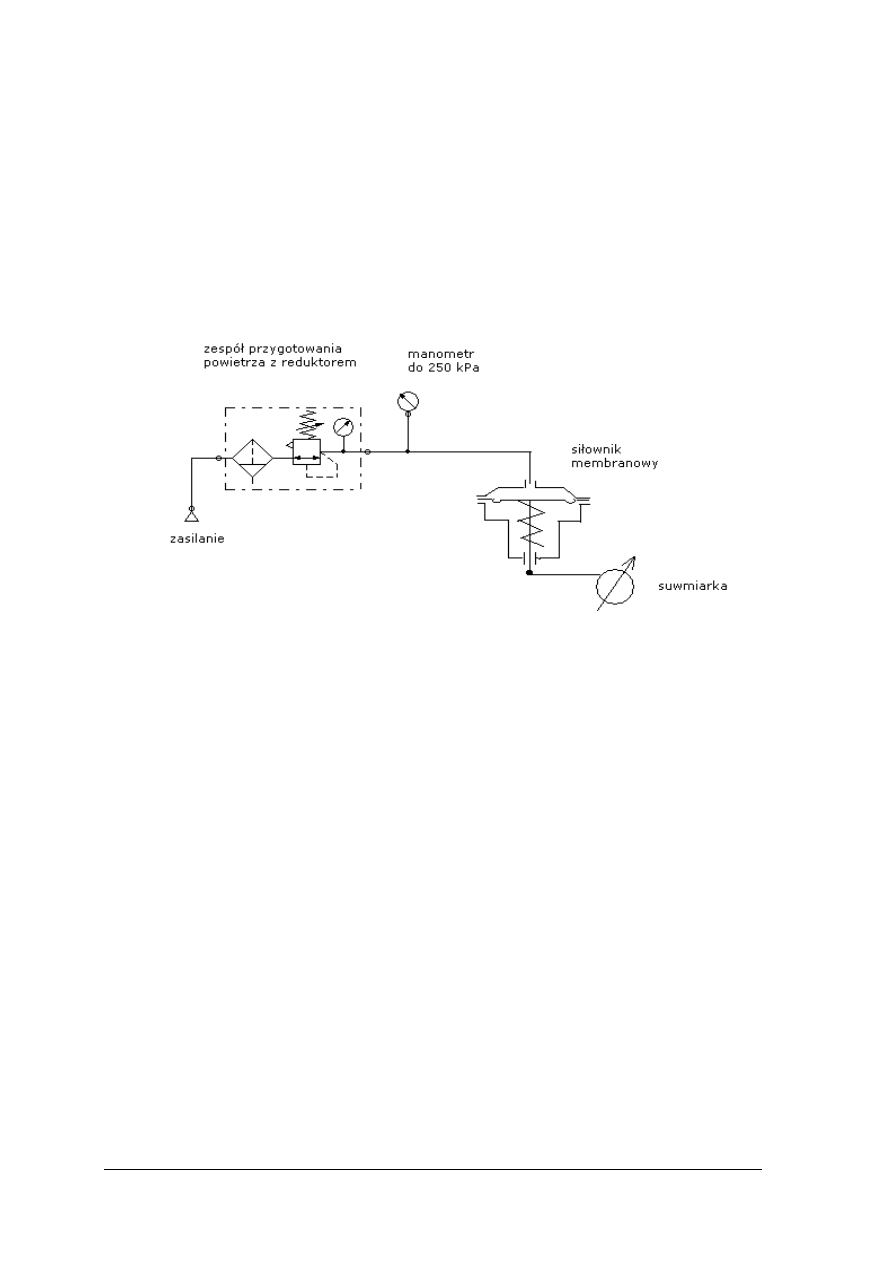
Ćwiczenie 1
Wyznacz charakterystykę statyczną siłownika membranowego. Wykonaj pomiary
dla różnych ciśnień, a wyniki zapisz w tabeli i wykonaj wykres. Dokonaj analizy otrzymanej
charakterystyki i oceń błędy.
Rys. do ćwiczenia 1. Schemat do badania siłownika membranowego
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć siłownik na stanowisku pomiarowym zgodnie ze schematem,
2) zmieniając ciśnienie zasilania wyznaczyć charakterystyki statyczne,
3) zapisać wyniki pomiarów do tabeli,
4) przeprowadzić analizę wykonanych pomiarów.
Wyposażenie stanowiska pracy:
–
siłownik membranowy o działaniu prostym,
–
stanowisko pomiarowe,
–
sprężarka,
–
reduktor,
–
manometr,
–
suwmiarka.
Ćwiczenie 2
Przeanalizuj budowę siłownika hydraulicznego i pneumatycznego dwustronnego
działania oraz wyjaśnij zasady ich sterowania.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) określić miejsca podłączenia sygnałów sterujących,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
2) określić różnice w uszczelnieniach siłowników,
3) pomierzyć skok siłownika,
4) przeprowadzić przegląd kart katalogowych siłowników.
Wyposażenie stanowiska pracy:
–
siłowniki tłokowe pneumatyczne i hydrauliczne różnych typów,
–
plansze z rysunkami siłowników,
–
karty katalogowe siłowników.
Ćwiczenie 3
Podłącz siłownik pneumatyczny do układu sterowania zgodnie z rysunkiem 24 Poradnika
dla ucznia, przeprowadź próbę sterowania dla ciśnień od 120 do 350 kPa ustawianych
reduktorem.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) podłączyć siłownik pneumatyczny do układu sterowania,
2) sterując zaworem 4/2 obserwować ruchy siłownika,
3) wykonać pomiary dla różnych ciśnień zasilających,
4) pomierzyć czasy przejścia tłoczyska siłownika dla różnych ciśnień.
Wyposażenie stanowiska pracy:
–
siłownik tłokowy pneumatyczny dwustronnego działania,
–
zawór sterujący z napędem mechanicznym 4/2,
–
sprężarka,
–
węże łączeniowe.
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
określić funkcje siłownika?
2)
określić jak sterowany jest siłownik membranowy?
3)
odróżnić siłownik pneumatyczny od hydraulicznego?
4)
przedstawić sposoby sterowania siłownikiem pneumatycznym?
5)
określić rodzaje zaworów sterujących siłownikami?
6)
objaśnić na schemacie sposób sterowania zaworem?
7)
objaśnić budowę i działanie zaworów sterujących?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
4.5. Wyznaczanie charakterystyki zaworu
4.5.1. Materiał nauczania
W układach regulacji elementy nastawcze (rys. 26) umożliwiają oddziaływanie
na przepływ czynnika do lub z obiektu regulacji. Najczęściej stosowanym rodzajem urządzeń
nastawczych są zawory.
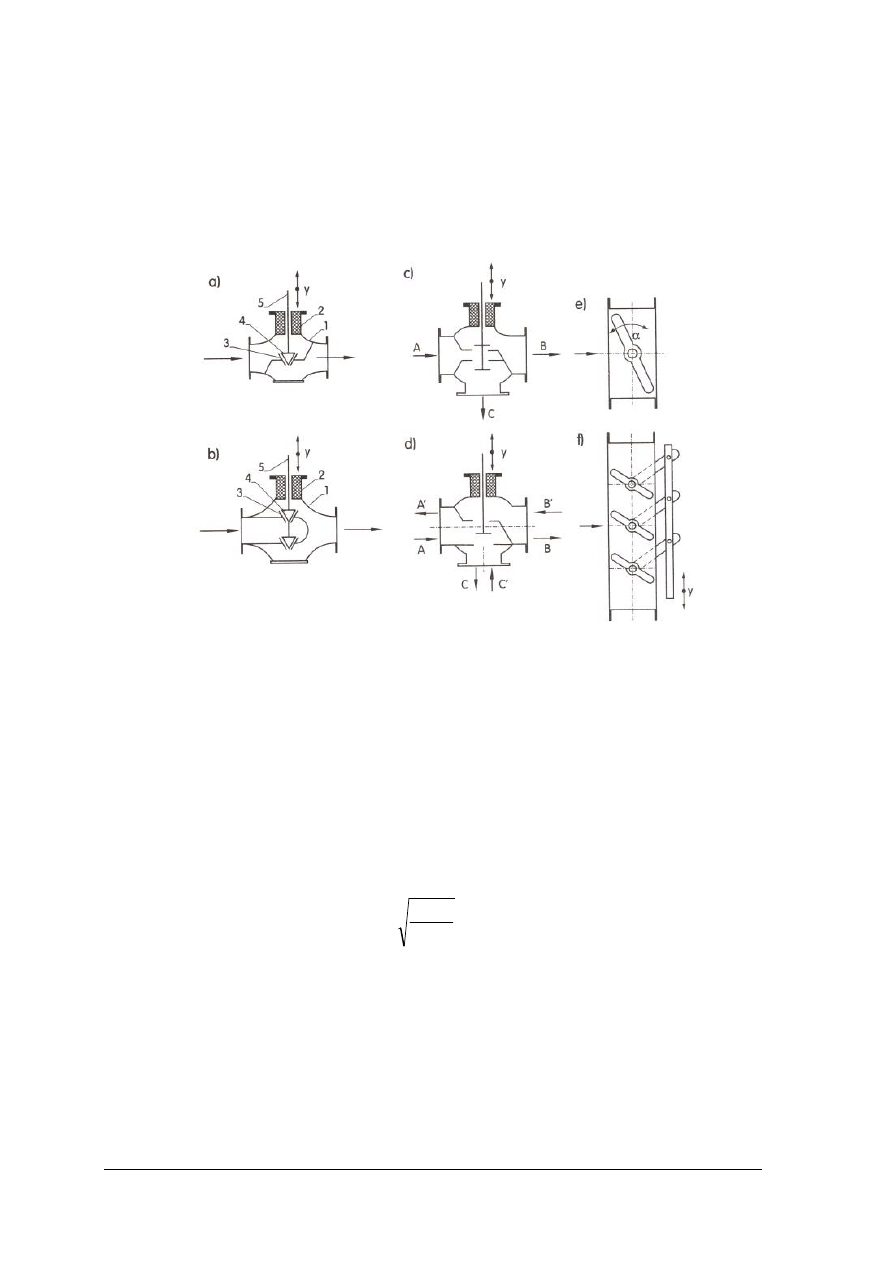
Rys. 26. Rodzaje urządzeń nastawczych: a) zawór jednogniazdowy, b) zawór dwugniazdowy,
c) zawór trójdrogowy rozdzielający, d) zawór trójdrogowy mieszająco – rozdzielający,
e) przepustnica, f) przepustnica żaluzjowa [3, s. 93]
W zaworach dwugniazdowych ciśnienie działa na dwa grzybki w przeciwnych
kierunkach, co zmniejsza siłę obciążającą element napędowy (siłownik). Zawory
jednogniazdowe są szczelniejsze od pozostałych. Zawory trójdrogowe rozdzielające
umożliwiają rozdzielenie strumienia. Zawory mieszająco – rozdzielające jak wskazuje nazwa
mieszają dwa strumienie. Niezależnie od typu każdy zawór składa się z: korpusu 1, dławicy 2,
gniazda 3, grzybka 4, wrzeciona 5 (rys. 26a).
Natężenie przepływu cieczy płynącej przez zawór
Dla cieczy charakteryzujących się lepkością o liczbie Reynoldsa
4000
Re
>
natężenie
przepływu określone jest zależnością:
ρ
∆
=
zaw
v
p
K
Q
[wzór 1]
gdzie: Q – strumień (m
3
/h), K
v
−
współczynnik normalny przepływu,
∆
p
zaw
−
spadek ciśnienia na zaworze,
ρ
−
gęstość
czynnika.
Dla gazów oraz dla cieczy o bardzo dużej lepkości wzór jest bardziej skomplikowany.
Współczynnik K
v
liczbowo jest równy natężeniu przepływu wody o temperaturze
4
o
C i spadku ciśnienia na zaworze
kPa
100
p
zaw
=
∆
. Wartość współczynnika K
v
zależy
od pola przepływu zaworu i dla określonego zaworu zależy od przesunięcia wrzeciona.
Zależność pomiędzy przesunięciem wrzeciona, a wartością współczynnika K
v
nazywa
się charakterystyką wewnętrzną zaworu. Jest to charakterystyka statyczna określająca jego
własności nastawcze. Charakterystykę wewnętrzną zaworu można wyznaczyć znając
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
charakterystykę otwarcia oraz jedną wartość współczynnika K
v
. Zwykle znana jest wartość
współczynnika K
vmax
wyznaczona doświadczalnie i podawana w katalogach. Odpowiada ona
maksymalnemu
przesunięciu
wrzeciona,
czyli
całkowitemu
otwarciu
zaworu.
Charakterystyka otwarcia zaworu jest zależna od kształtu i rozmiarów grzybka. Na rysunku
27 przedstawiono podstawowe charakterystyki zaworów.
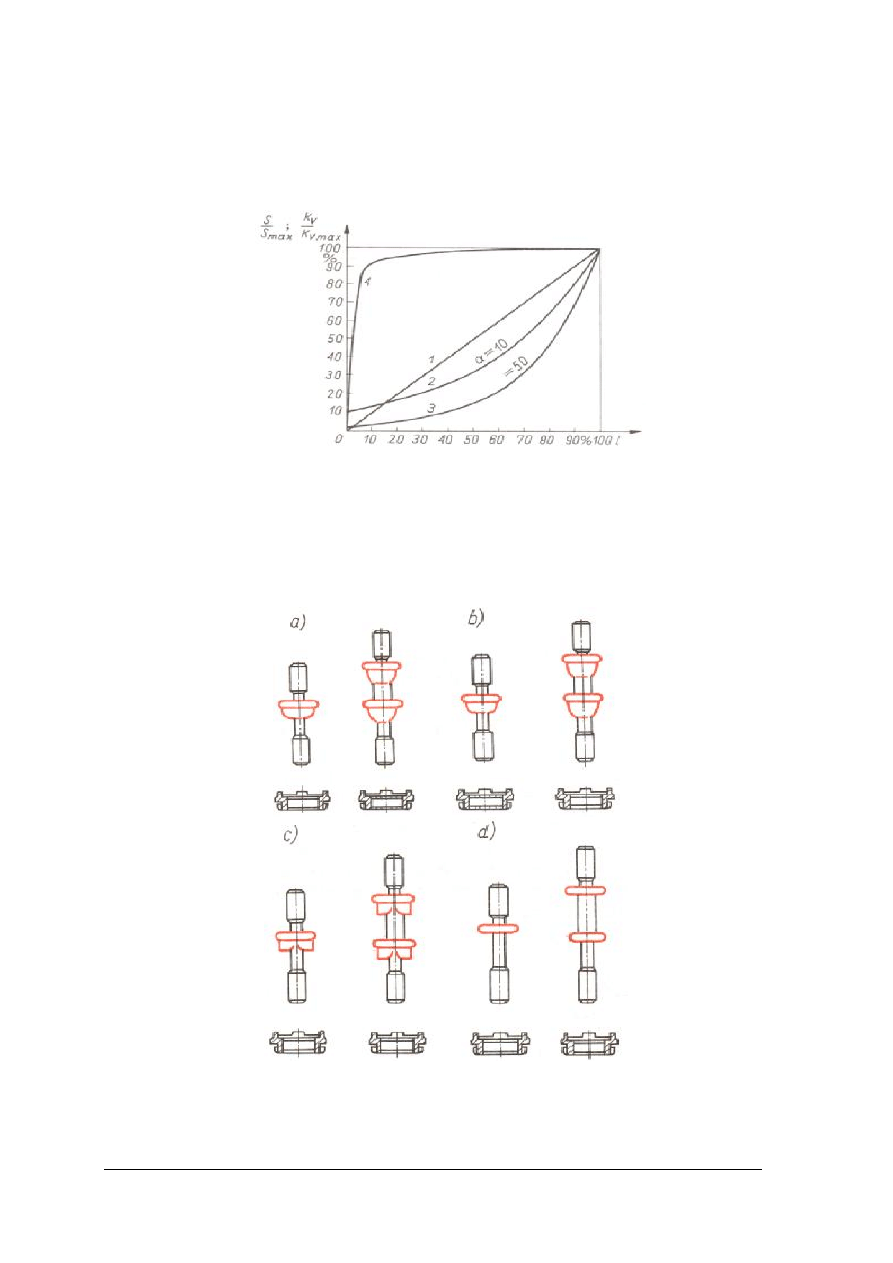
Rys. 27. Charakterystyki otwarcia zaworu: 1 – liniowego, 2, 3 – stałoprocentowego,
4 – szybkootwierającego; gdzie: S – pole przepływu zaworu,
α
−
współczynnik typu zaworu, l – skok wrzeciona zaworu [3, s. 128]
Nazwa charakterystyka stałoprocentowa oznacza, że zmiana położenia wrzeciona
powoduje taką samą procentową zmianę pola przepływu, niezależnie od tego, czy stopień
otwarcia zaworu jest duży czy mały. Kształty grzybków, od których zależy charakterystyka
zaworu przedstawiono na rysunku 28.
Rys. 28. Grzybki stosowane w zaworach: a) stałoprocentowy (konturowy), b)
liniowy, c) stałoprocentowy (tłoczkowy), d) szybkootwierający [3, s. 130]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Zasady doboru zaworu do charakterystyki obiektu regulacji
Dobrze dobrany zawór winien zapewnić wymagany zakres zmian natężenia przepływu.
Urządzeniem, które napędza zawór jest siłownik, dlatego powinna istnieć zdefiniowana
zależność pomiędzy sygnałem wyjściowym z regulatora, a wartością przepływu. Najlepiej,
aby ta zależność była liniowa. Rozróżniamy dwa rodzaje instalacji, w których jako urządzenia
nastawcze stosowane są zawory.
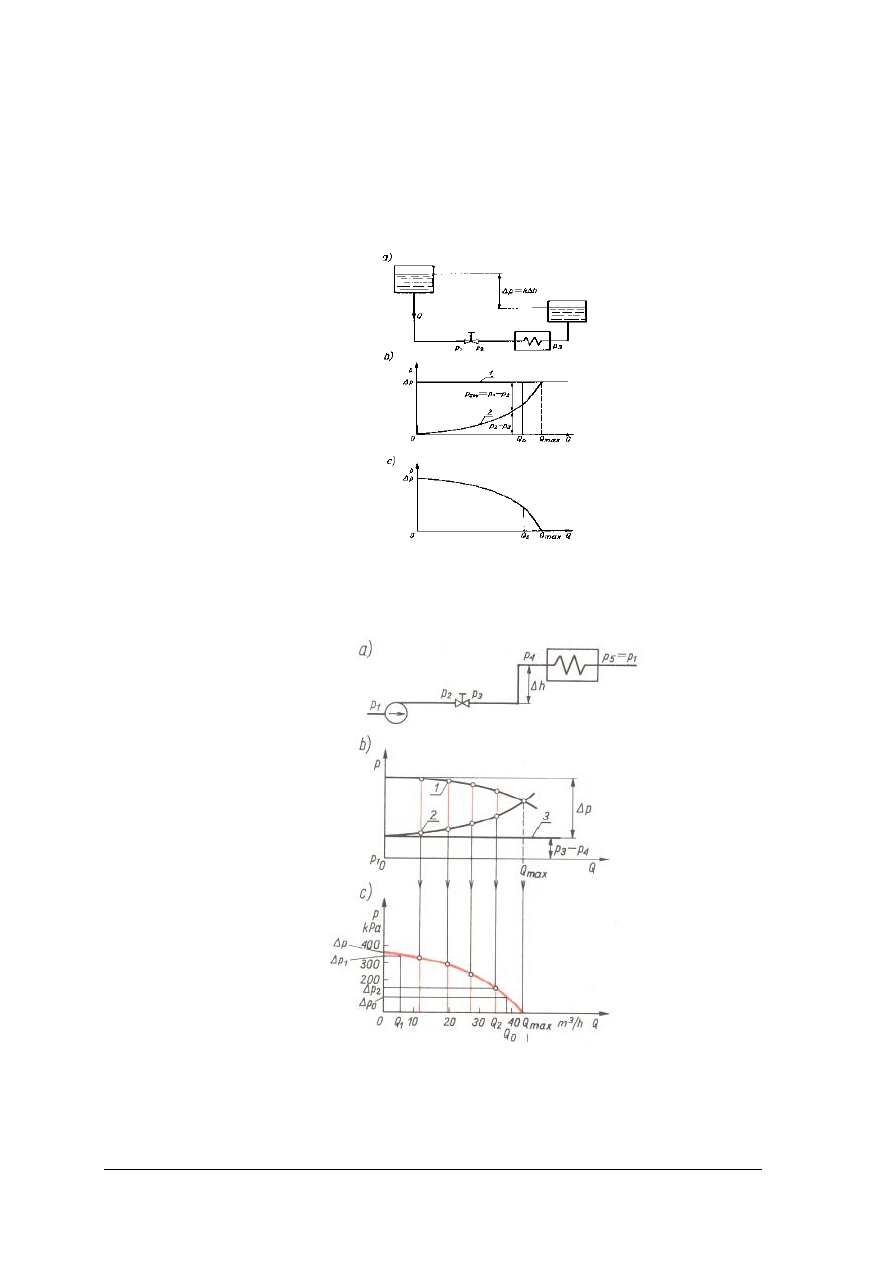
1. Instalacja ze stałym ciśnieniem wymuszającym (rys. 29).
Rys. 29. Instalacja ze stałym ciśnieniem wymuszającym
∆
h = constans
:
a) schemat, b) wykresy
ciśnienia, c) charakterystyka wewnętrzna instalacji; gdzie: 1 – ciśnienie wymuszające, 2
– spadek ciśnienia w instalacji [3, s. 131]
2. Instalacja z pompą wirową (rys. 30).
Rys. 30. Instalacja z pompą wirową: a) schemat, b) wykresy
ciśnienia, c) charakterystyka wewnętrzna instalacji; gdzie:
1 – ciśnienie wytwarzane przez pompę wirową, 2 – spadek
ciśnienia w instalacji, 3 – ciśnienie statyczne, wynikające
z różnicy poziomów na początku i końcu instalacji, Q –
przepływ [3, s. 132]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
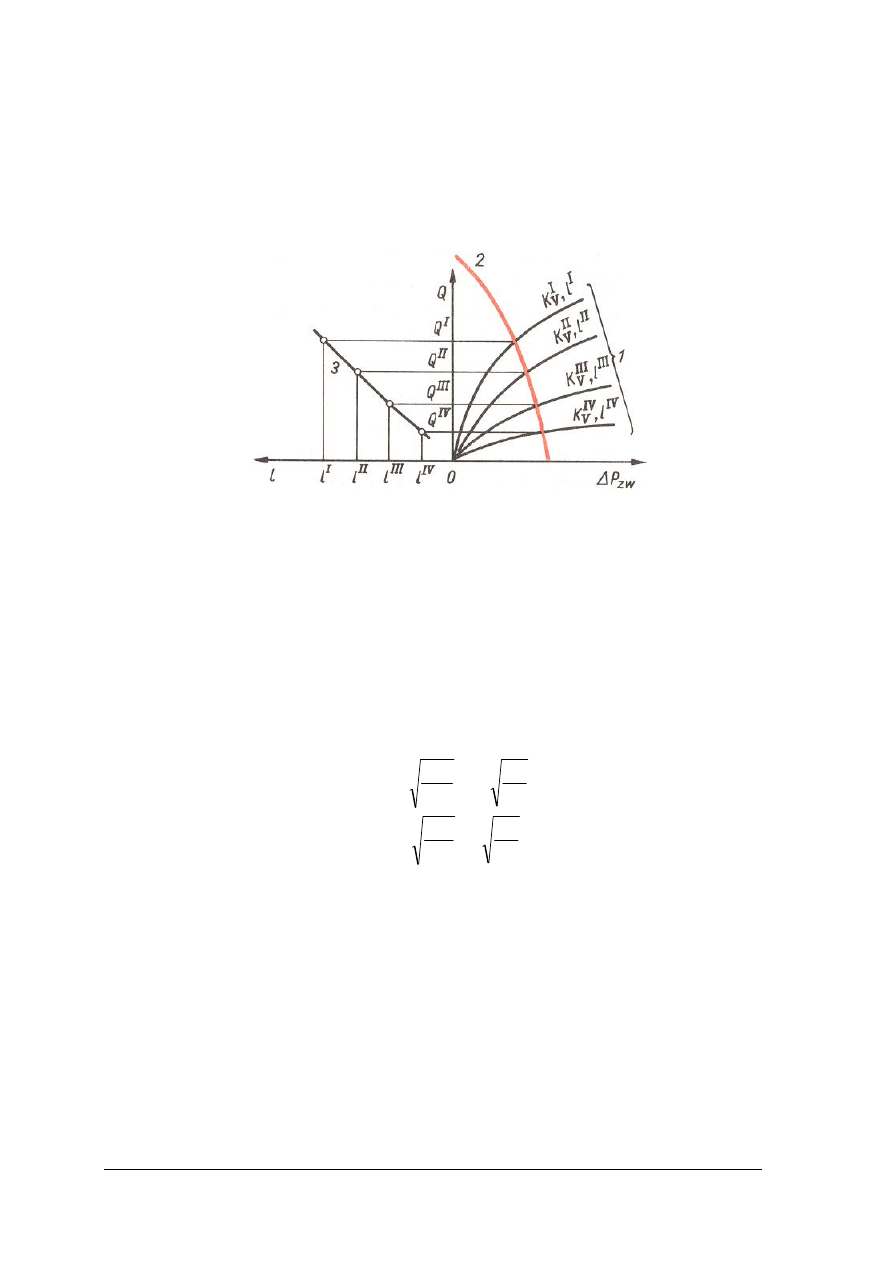
Mając wyznaczoną charakterystykę wewnętrzną instalacji możemy katalogów
charakterystyk zaworów dobrać charakterystykę zaworu. Na rysunku 31 przedstawiono
zasady doboru charakterystyki zaworu do instalacji wewnętrznej. Każdej wartości
współczynnika przepływu K
v
odpowiada określona wartość przesunięcia wrzeciona l.
Uzyskiwane wartości strumienia Q wyznaczają punkty przecięcia charakterystyki
wewnętrznej instalacji z charakterystykami otwarcia zaworu, przy różnych wartościach
przesunięcia wrzeciona l.
Rys. 31. Wyznaczenie charakterystyki roboczej zaworu: 1 – charakterystyki zaworu, 2 –
charakterystyka wewnętrzna instalacji, 3 – charakterystyka robocza zaworu (Q = f(l)) [3,
s. 132]
Przykład doboru wymiaru zaworu do instalacji według rysunku 30.
Q
2
= 35m
3
/h,
Q
1
= 5m
3
/h,
Gęstość
ρ
= 0,9.
Z charakterystyki wewnętrznej instalacji (rys. 30c) uzyskujemy informację, dla jakich
wartości spadku ciśnienia na zaworze uzyskamy założone wartości przepływu
∆
p
1
= 360kPa, a
∆
p
2
= 150kPa
Przekształcając wzór nr 1 otrzymujemy maksymalną i minimalna wartość współczynnika
przepływu poszukiwanego zaworu.
27
3
,
1
9
,
0
35
p
Q
K
2
2
max
v
≈
≈
∆
ρ
=
5
,
2
6
,
3
9
,
0
5
p
Q
K
1
1
min
v
≈
≈
∆
ρ
=
Otrzymaną maksymalną wartość współczynnika przepływu powiększamy o około 40%,
dzięki czemu uzyskujemy możliwość regulacji przepływu zbliżoną do maksymalnej
38
4
,
1
27
K
max
v
≈
⋅
=
Dla wartości K
vmax
znajdujemy w katalogu zawór o średnicy gniazda 50 mm. Należy
jeszcze określić rodzaj zaworu. Charakterystykę zaworu dobieramy korzystając z rodziny
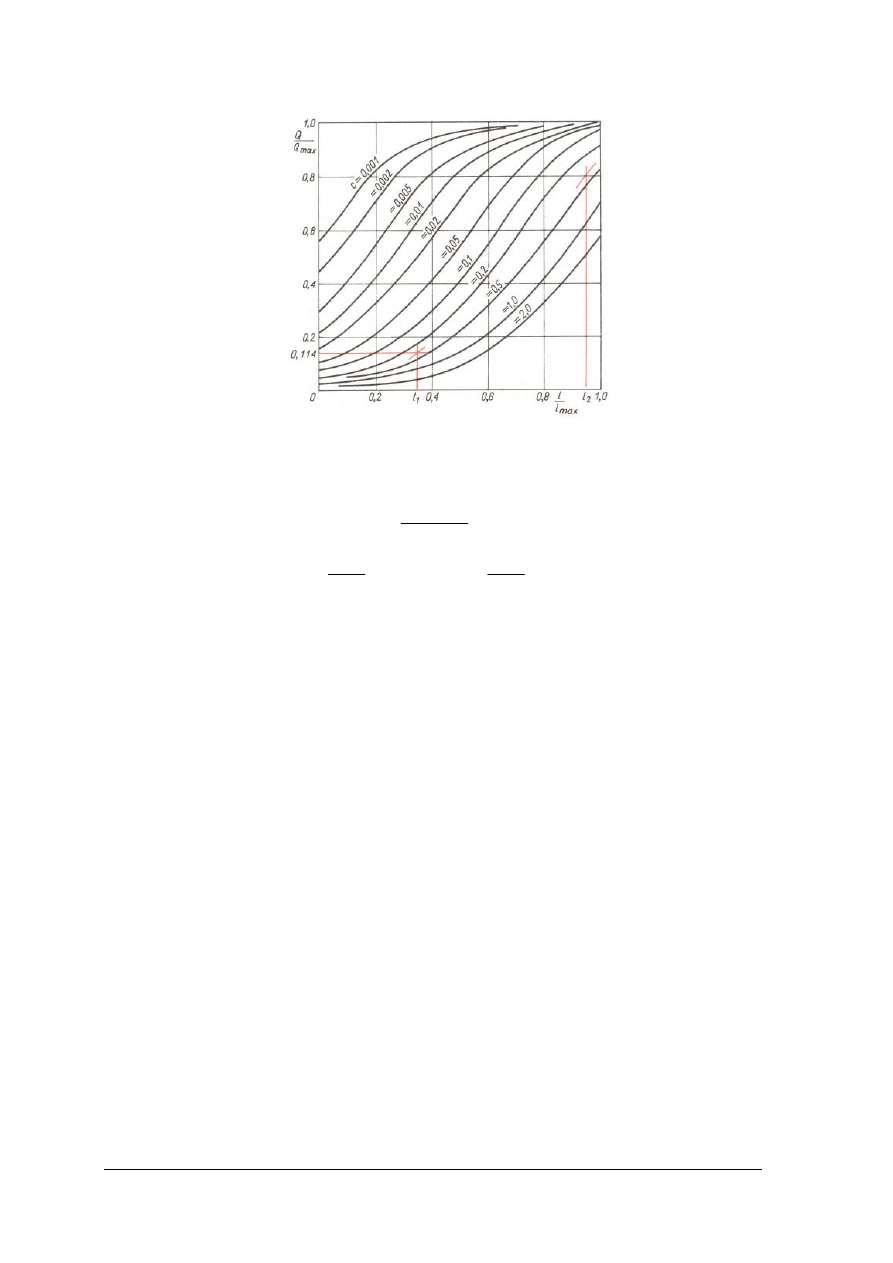
charakterystyk przedstawionych na rysunku 32.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
Rys. 32.
Charakterystyki robocze zaworów stałoprocentowych [3, s. 134]
Z charakterystyki z rysunku 30 odczytujemy Q
max
≈
44m
3
/h,
∆
p
≈
350kPa,
∆
p
o
≈
110kPa.
Na tej podstawie obliczamy
46
,
0
p
p
p
c
o
o
≈
∆
−
∆
∆
=
114
,
0
Q
Q
max
1
≈
,
8
,
0
Q
Q
max
2
≈
Z charakterystyki z rysunku 32 odczytujemy dla obliczonego c wartości l
1
= 0,32
oraz l
2
= 0,92.
Istnieją również prostsze metody doboru zaworu opierając się na programie
komputerowym zakładów POLNA o nazwie diVent 1.3, dostępnym w sieci Internetowej.
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie jest zadanie elementów nastawczych?
2. Z jakich elementów zbudowany jest zawór?
3. Co to jest współczynnik przepływu K
v
?
4. Jakie znasz charakterystyki zaworów?
5. Od czego zależy charakterystyka zaworu?
6. Jakie mogą być rodzaje instalacji przepływowej?
7. Co jest wymagane do określenia charakterystyki roboczej zaworu?
4.5.3. Ćwiczenia
Ćwiczenie 1
Wyznacz
charakterystykę
wewnętrzną
instalacji
na
podstawie
otrzymanych
od nauczyciela danych zgodnych ze schematem z rysunku 30 Poradnika dla ucznia. Przebiegi
ciśnień w instalacji jak na rysunku 30b Poradnika dla ucznia. Narysuj charakterystykę
wewnętrzną instalacji.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować dostarczony przez nauczyciela schemat instalacji,
2) sporządzić na podstawie dostarczonych danych charakterystykę wewnętrzną instalacji,
3) odczytać z charakterystyki dane do doboru zaworu,
4) przeprowadzić analizę wykonanych charakterystyk.
Wyposażenie stanowiska pracy:
–
schematy instalacji przepływowej z danymi,
–
papier milimetrowy do sporządzenia charakterystyk,
–
kalkulator.
Ćwiczenie 2
Wyznacz charakterystykę roboczą zaworu korzystając z danych wyznaczonych
w ćwiczeniu 1 oraz informacji zawartych w przykładzie z Materiału nauczania. Dobierając
zawór korzystaj z katalogów fabrycznych na przykład POLNA S.A. Sprawdź wykonane
zadanie programem komputerowym do doboru zaworów.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować wykonaną charakterystykę wewnętrzną instalacji z ćwiczenia 1,
2) sporządzić charakterystykę roboczą zaworu zgodnie z rysunkiem 28 Poradnika dla
ucznia,
3) dobrać typ zaworu w oparciu o przykład z materiału nauczania,
4) korzystając z kart katalogowych zaworów dobrać zawór.
Wyposażenie stanowiska pracy:
–
charakterystyka wewnętrzna instalacji,
–
karty katalogowe zaworów POLNA S.A.,
–
papier milimetrowy do sporządzenia charakterystyk,
–
kalkulator.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
opisać rodzaje elementów nastawczych?
2)
opisać budowę zaworu?
3)
wyjaśnić co przedstawia charakterystyka zaworu?
4)
sporządzić charakterystykę wewnętrzną instalacji?
5)
dobrać charakterystykę zaworu dla charakterystyki wewnętrznej
instalacji?
6)
skorzystać z katalogów zaworów?
7)
dokonać analizy instalacji wymuszającej?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.6. Regulacja siłownika elektrycznego liniowego i łączenie
siłownika z zaworem
4.6.1. Materiał nauczania
Siłowniki elektromagnetyczne stosowane są do sterowania zaworów o niewielkich
średnicach nominalnych w trybie (otwarty/zamknięty lub sterowanie liniowe). Podstawowym
elementem tego siłownika jest elektromagnes, który pod wpływem doprowadzonego napięcia
otwiera zawór, a po wyłączeniu napięcia sprężyna powoduje zamknięcie zaworu. Stosowane
są również konstrukcje, w których działanie jest odwrotne, to znaczy doprowadzenie napięcia
zamyka zawór, a wyłączenie otwiera. Siłowniki z wyjściem liniowym są wyposażone
w sterownik sterowany standardowym sygnałem prądowym 4...20mA, wysunięcie trzpienia
siłownika jest proporcjonalne do sygnału sterującego.
Siłowniki silnikowe (rys. 33) stosowane są w układach sterowania i regulacji do napędu
różnych elementów nastawczych: zaworów, zasuw oraz przepustnic. Elementem napędowym
w tych siłownikach jest silnik elektryczny jedno, dwu
−
, trójfazowy oraz silniki krokowe.
Silniki elektryczne charakteryzują się dużą prędkością kątową i małym momentem
obrotowym. Do przestawiania elementów nastawczych potrzebne są duże siły i niewielkie
prędkości. Zmniejszenie prędkości i zwiększenia momentu obrotowego uzyskuje się przez
zastosowanie przekładni mechanicznej. Siłowniki w zależności od rodzaju ruchu elementu
wyjściowego dzielimy na:
–
obrotowe,
–
liniowe,
–
wahliwe (korbowe).
W
zależności
od
prędkości
elementu
wyjściowego
siłowniki
mogą
być:
stałoprędkościowe lub zmiennoprędkościowe. Ze względu na wymagania stawiane
w układach regulacji siłowniki mogą być regulacyjne lub sterownicze. Wymagania stawiane
siłownikom regulacyjnym są określone w Polskich Normach i są bardzo zawyżone
w stosunku do siłowników sterowniczych.
Podstawowa konstrukcja siłownika jest oparta na: silniku, przekładni zębatej oraz zespole
elementów, jakimi są mikrowyłączniki ograniczające drogę siłownika, układ zabezpieczenia
przeciążeniowego oraz układ odwzorowania położenia elementu wyjściowego.
Rys. 33. Schemat poglądowy siłownika elektrycznego: 1 – silnik, 2 – przekładnia zębata, 3 –
nakrętka, 4 – śruba, 5 – mikrowyłączniki krańcowe, 6 – styki elementu załączającego [3,
s. 149]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Siłowniki mogą pracować systemem załączony – wyłączony lub mogą być sterowane
standardowym sygnałem sterującym 0...20mA lub 4...20mA. Sterowanie siłowników
systemem załączony – wyłączony:
–
dla siłowników sterowniczych realizują układy styczników,
–
dla siłowników regulacyjnych sterowanie wykonują regulatory trójstanowe.
Siłowniki wyposażone w wewnętrzny sterownik mogą być sterowane sygnałem
analogowym 0...20mA lub 4...20mA.
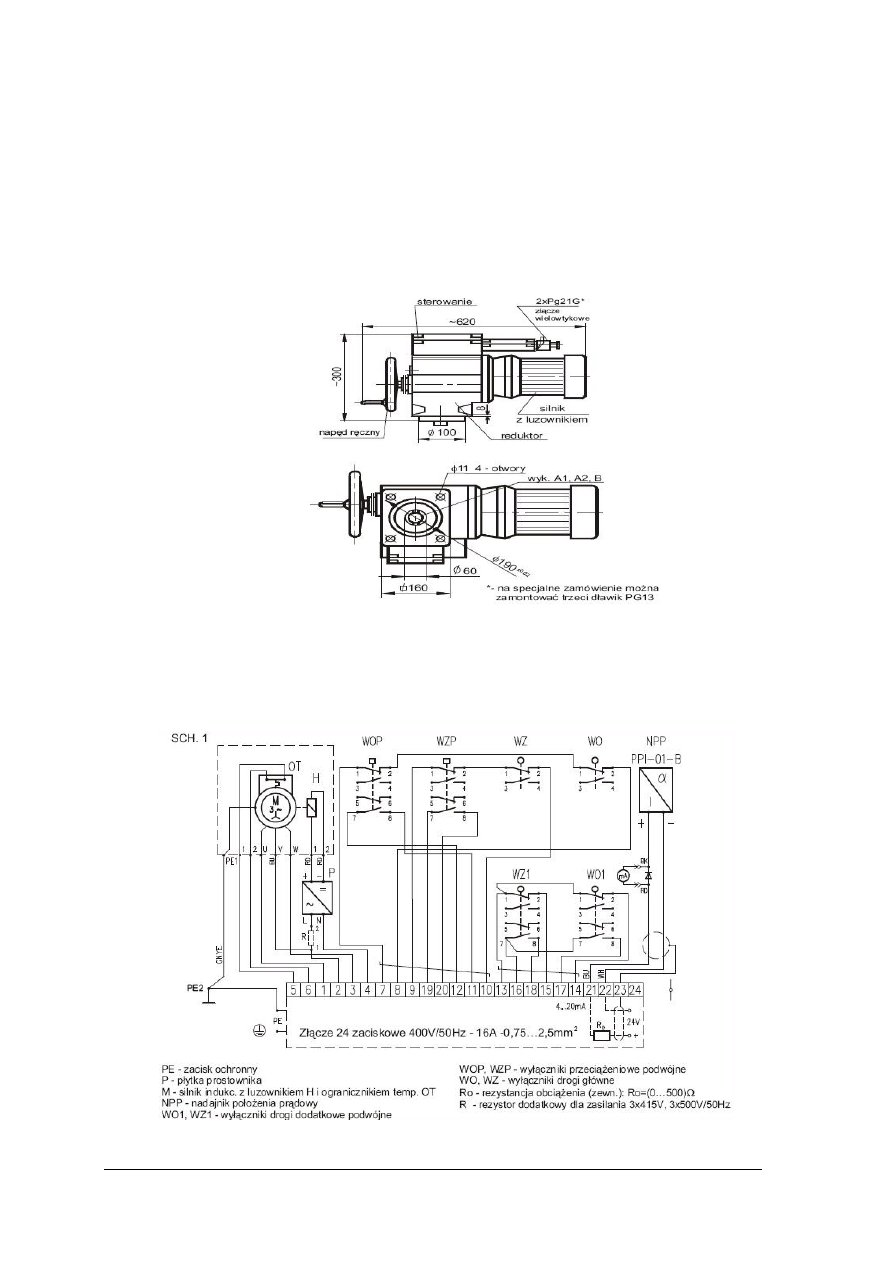
Siłownik obrotowy stałoprędkościowy typu ESO
−
01 produkcji CONTROLMATICA
przedstawiony został na rysunku 34.
Rys. 34. Siłownik obrotowy [CONTROLMATICA S.A.]
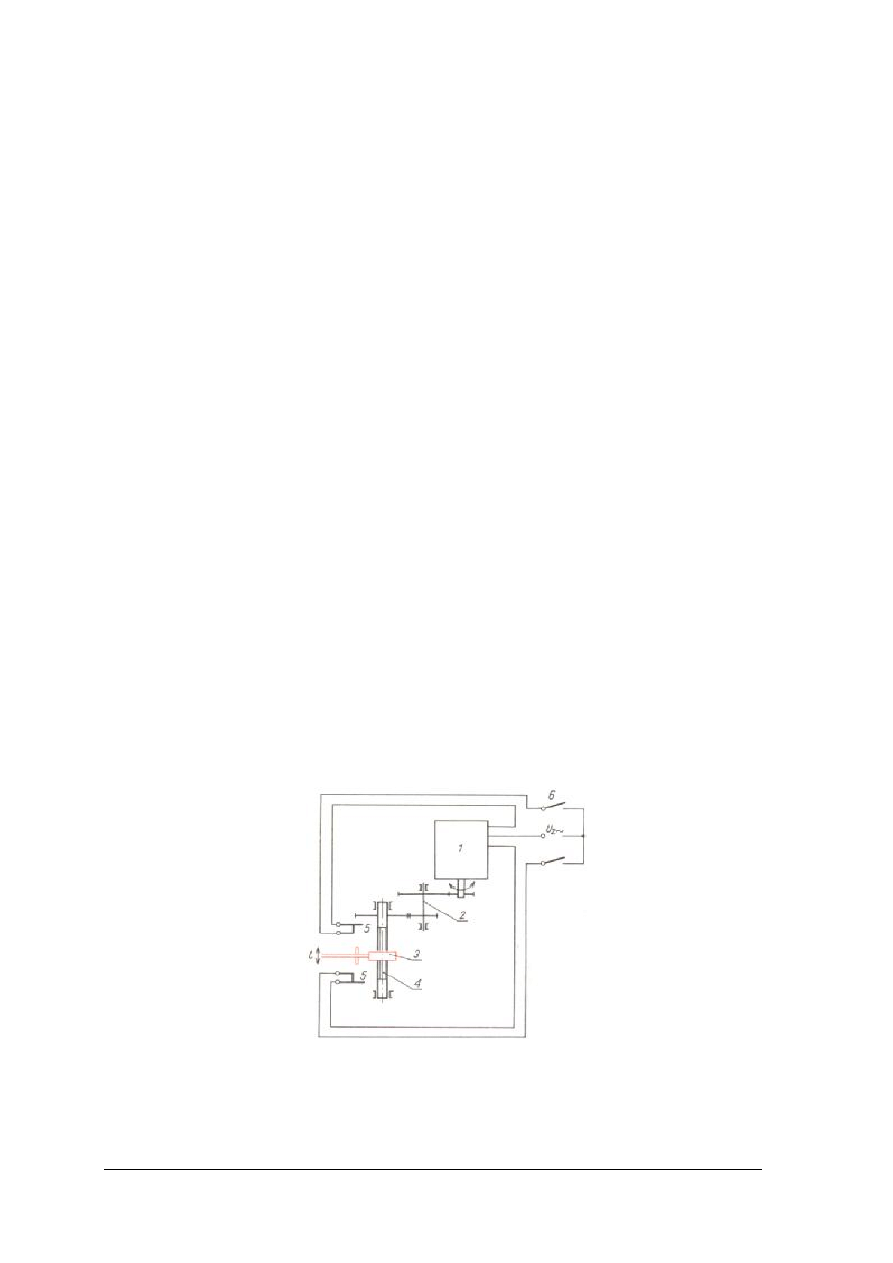
Siłownik może być montowany do zaworu, który posiada obrotowy ruch wrzeciona.
W skrzynce sterowania siłownika (rys. 34) są umieszczone elementy do sterowania
oraz elementy odwzorowania położenia. Zasilanie, sterowanie hamulcem (luzownikiem),
sygnały: sterujący i odwzorowania położenia maja połączenie poprzez złącze wielowtykowe.
Rys. 35. Schemat podłączeń elektrycznych do siłownika [ CONTROLMATICA S.A.]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
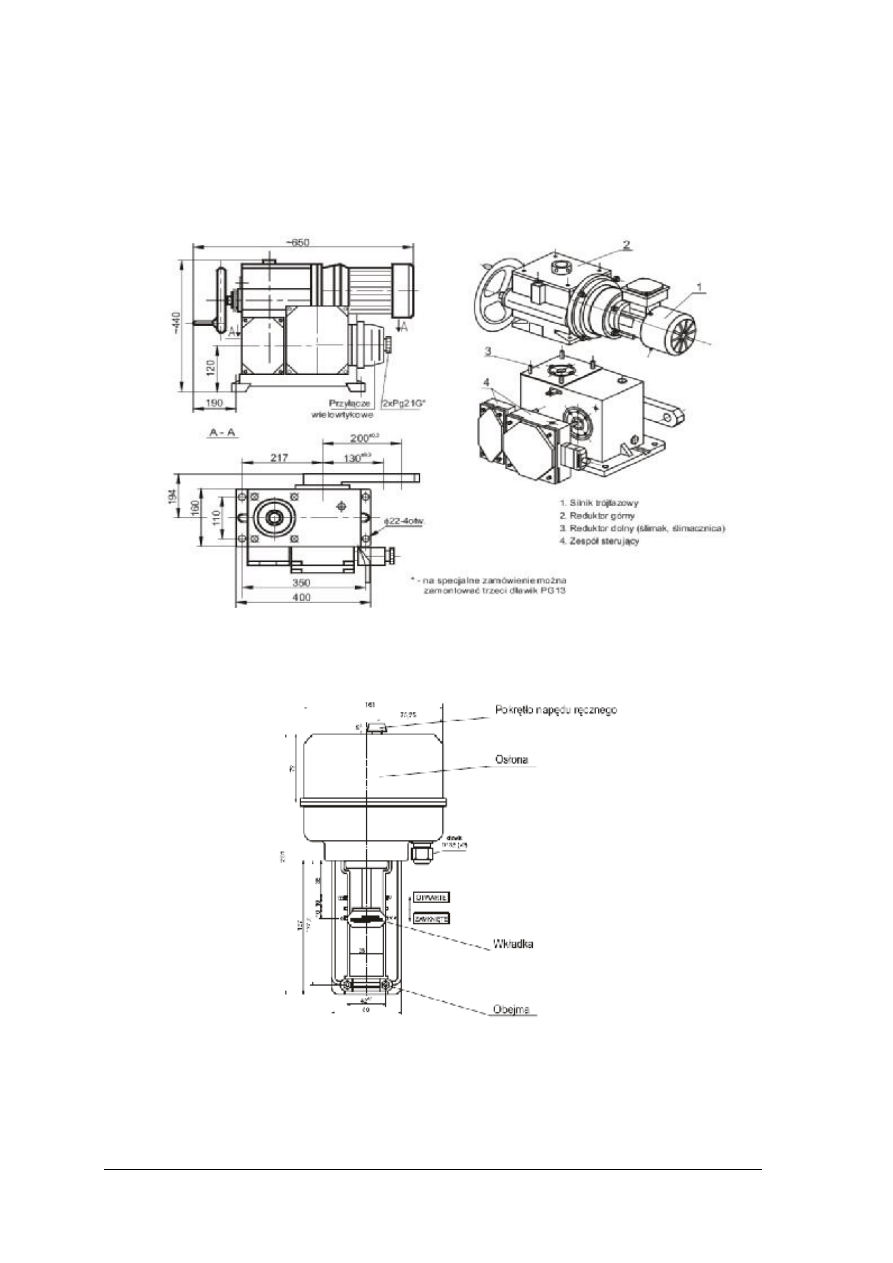
Siłownik wahliwy (korbowy, rys. 36) charakteryzuje się obrotowym ruchem elementu
wyjściowego (korby) w zakresie kąta obrotu 90° lub 120° lub 150°. Jest stosowany do napędu
elementów nastawczych, w których wymagany jest duży moment obrotowy. Połączenie
siłownika z elementem nastawczym następuje poprzez cięgno, które jest przyłączane
do korby. Siłownik może być sterowany sygnałem trójstanowym lub standardowym sygnałem
prądowym. Siłownik łączony jest z elementem nastawczym poprzez korbę.
Rys. 36. Siłownik wahliwy (korbowy) [ CONTROLMATICA S.A.]
Siłownik liniowy (rys. 37) służy do napędu elementów nastawczych, w których
wymagany jest liniowy ruch wrzeciona zaworu.
Rys. 37.
Siłownik liniowy ESL–16 [CONTROLMATICA S.A.]
Siłownik liniowy stosowany jest w systemach grzewczych, klimatyzacyjnych
i wentylacyjnych. Siłownik jest wyposażony w mikroprocesorowy sterownik, który może być
sterowany sygnałem trójstanowym lub ciągłym. Siłownik jest łączony z zaworem
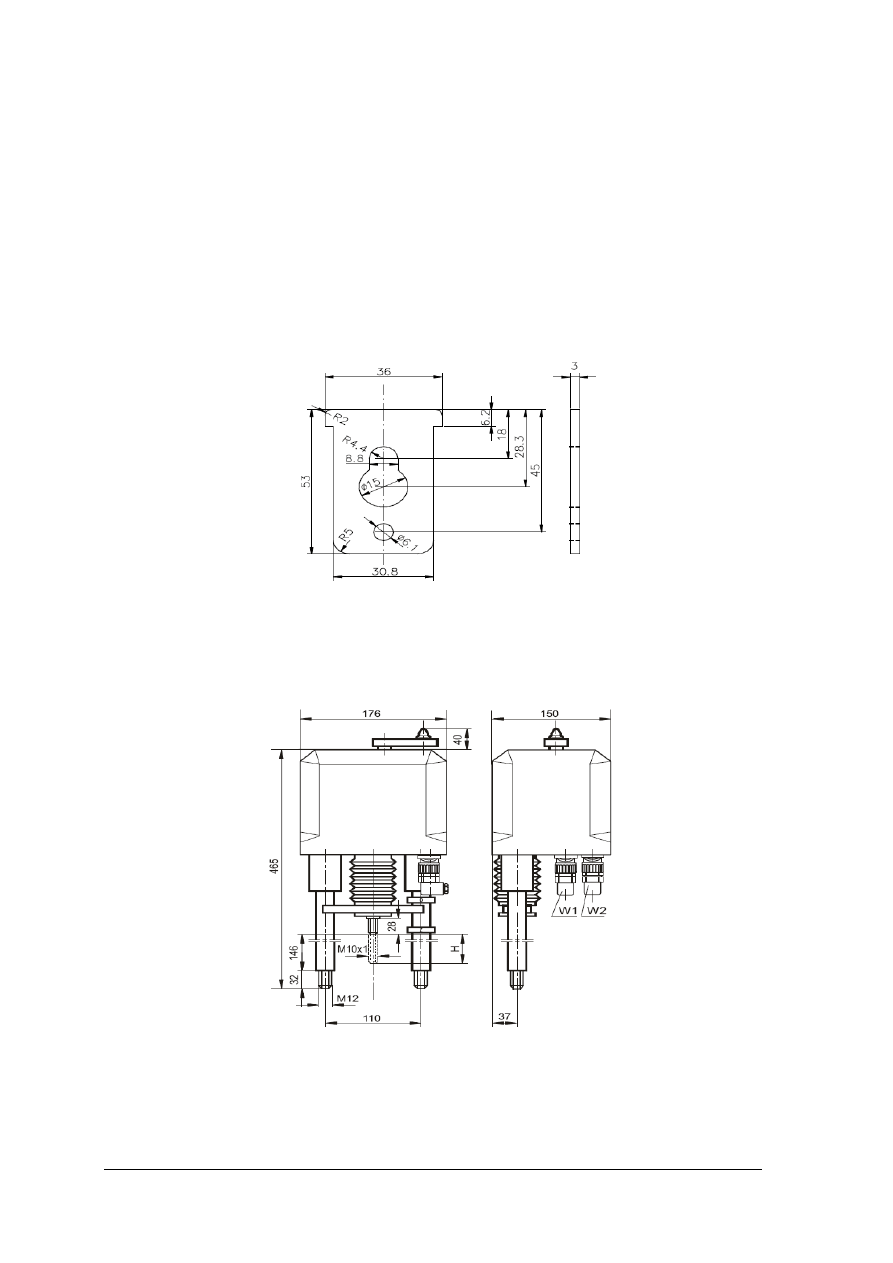
bezpośrednio lub przez wkładkę, której gabaryty przedstawiono na rysunku 38.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Uwagi:
1. Pokrętło napędu ręcznego działa po wciśnięciu w dół.
2. Osłona siłownika jest mocowana do korpusu za pomocą wkrętów M4x65.
3. Obejma wykonana jest z pręta stalowego o średnicy 5mm. Kształtem przypomina literę
„U” o promieniu wewnętrznym ok. 18,5mm. Na końcach obejmy znajdują się 2 nakrętki
M5.
4. Wkładka (dokładne gabaryty poniżej) służy do połączenia z elementem napędzanym
przez trzpień siłownika.
5. Dławiki D13,5 służą do doprowadzenia przewodów: zasilającego i sygnałowego
do siłownika. Maksymalna średnica zewnętrzna przewodów: 10mm.
Wymiary wkładki
Rys. 38.
Wkładka do połączenia siłownika z zaworem [CONTROLMATICA S.A.]
Siła znamionowa na wyjściu trzpienia siłownika może wynosić 600N lub 1000 N dla
skoku elementu wyjściowego 6, 3, 20 lub 25mm.
Siłowniki liniowe mogą być również łączone z zaworami poprzez łącznik i słupy łączące
(rys. 39).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Rys. 39.
Siłownik liniowy z łącznikiem do połączenia z zaworem [CONTROLMATICA S.A.]
Zasady regulacji i łączenia siłownika z zaworem
Po dobraniu jednego z powyższych siłowników do określonego typu elementu
nastawczego dokonujemy połączenia mechanicznego. Po mechanicznym połączeniu
siłownika z zaworem należy ustawić w układzie sterowania siłownika
skok wrzeciona
zaworu. W zależności od konstrukcji układu sterowania siłownika, drogę siłownika (tzn.
maksymalne i minimalne wysunięcie trzpienia) ustawia się za pomocą krzywek wyłączników
drogi WO, WZ, regulacji położenia wyłączników krańcowych WO, WZ lub przez
zaprogramowanie sterownika mikroprocesorowego. Układ przeciążeniowy siłownika jest
ustawiony fabrycznie i zapewnia zabezpieczenie silnika oraz układu mechanicznego.
Prawidłowo dobrany siłownik do zaworu winien zapewnić sterowanie elementu napędzanego
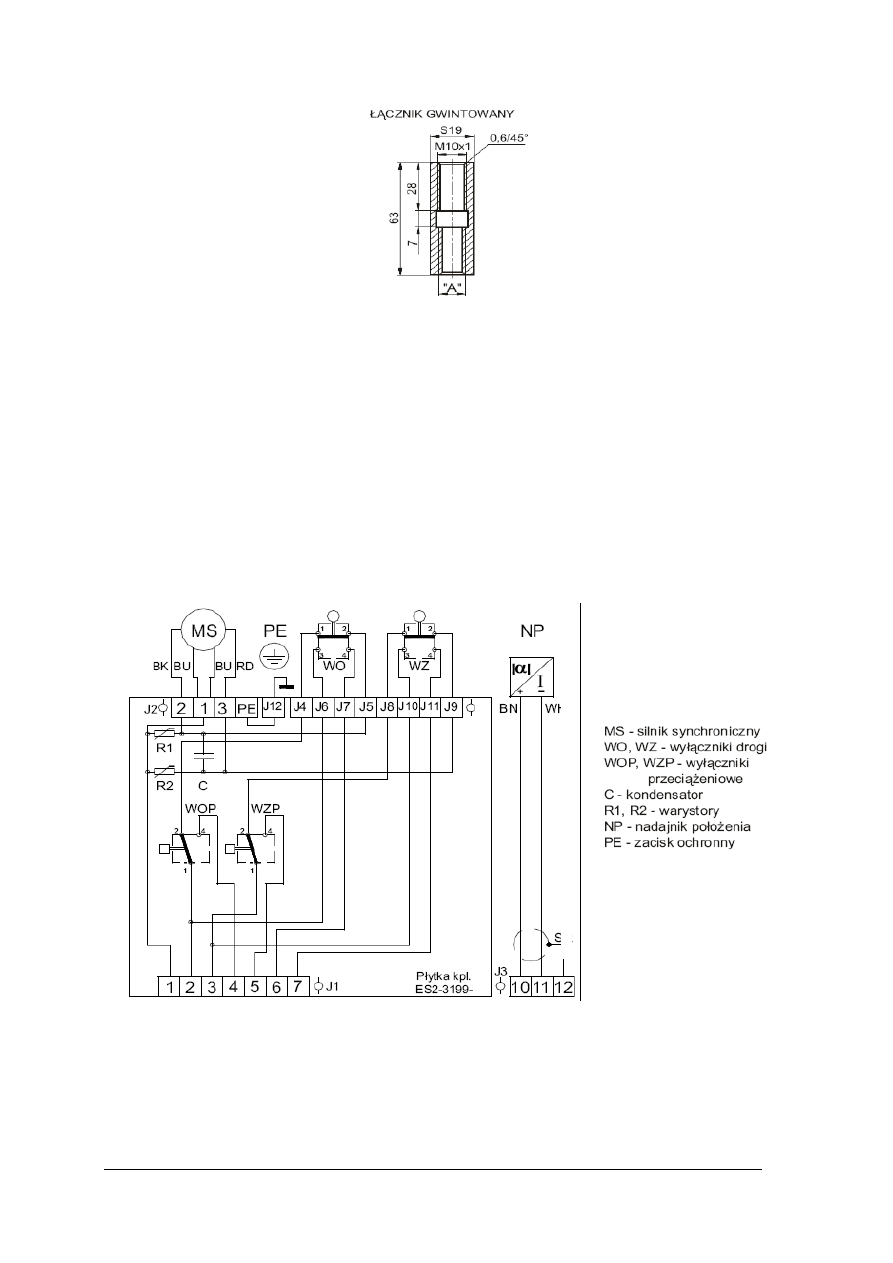
w pełnym zakresie. Na rysunku 40 przedstawiono schemat połączeń siłownika sterowanego
sygnałem trójstanowym 24VAC lub 230VAC.
Rys. 40.
Schemat podłączeń siłownika liniowego [CONTROLMATICA S.A.]
Proces regulacji skoku siłownika sterowanego sygnałem ciągłym przebiega odmiennie
i zostanie opisany w następnym punkcie niniejszego materiału nauczania.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
4.6.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz rodzaje siłowników elektrycznych?
2. Czym charakteryzuje się siłownik elektromagnetyczny?
3. Z jakich elementów zbudowany jest siłownik silnikowy?
4. Do czego stosowane są siłowniki obrotowe?
5. Jaki jest ruch elementu wyjściowego siłownika wahliwego?
6. Jakie są elementy nastawcze w układzie sterowania siłownikiem?
7. Do czego służą wyłączniki krańcowe w siłowniku?
8. Jakim sygnałem może być sterowany siłownik elektryczny?
4.6.3. Ćwiczenia
Ćwiczenie 1
Połącz mechanicznie siłownik elektryczny liniowy z zaworem poprzez wkładkę
i doprowadź sygnały sterujące z układu regulatora z wyjściem trójstanowym. Ustaw skok
siłownika krzywkami z załączaniem wyłączników krańcowych WO i WZ. Wysteruj
ten siłownik z regulatora sygnałem sterowania ręcznego oraz pomierz czas przejścia
siłownika od jednego do drugiego położenia skrajnego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) połączyć siłownik z zaworem,
2) ustawić wyłącznikami krańcowymi skok siłownika dla skoku zaworu,
3) ustawić układ odwzorowania położenia,
4) przeprowadzić sterowanie siłownikiem z regulatora na przykład MRC–03.
Wyposażenie stanowiska pracy:
–
regulator cyfrowy MRC – 03 z wyjściem trójstanowym,
–
siłownik ESL – 16 produkcji CONTROLMATICA S.A.,
–
zawór regulacyjny o skoku 25 mm,
–
przewody łączeniowe,
–
stoper.
Ćwiczenie 2
Dobierz na podstawie danych o zaworze z katalogu zaworów siłownik elektryczny
liniowy z katalogu siłowników. Dokonaj na podstawie danych katalogowych siłownika
analizy metod sterowania siłownikiem.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować dostarczony przez nauczyciela katalog zaworów,
2) przeanalizować katalog siłowników liniowych,
3) dobrać siłownik do zaworu,
4) przeprowadzić analizę metod sterowania siłownikiem.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Wyposażenie stanowiska pracy:
–
katalogi zaworów,
–
katalogi siłowników.
4.6.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
opisać rodzaje siłowników elektrycznych?
2)
opisać budowę siłownika silnikowego?
3)
wyjaśnić, jakie elementy zabezpieczeń są w siłowniku
elektrycznym?
4)
opisać jak łączymy siłownik z zaworem?
5)
wyjaśnić co regulujemy w układzie sterowania siłownika?
6)
wyjaśnić co to jest układ przeciążeniowy siłownik?
7)
podłączyć siłownik do układu sterowania?
8)
dobrać siłownik do zaworu?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
4.7. Konfigurowanie struktury siłownika sterowanego prądowo
i wyposażonego w mikrokontroler
4.7.1. Materiał nauczania
W tym rozdziale opisany zostanie siłownik liniowy ESL–16 przedstawiony
w poprzednim rozdziale (rys. 37) sterowany mikrokontrolerem – urządzenie, które
automatycznie programuje strukturę siłownika. Przed zaprogramowaniem siłownika należy
wykonać następujące czynności:
–
połączyć mechanicznie siłownik z zaworem tak, aby wkładka (rys. 38) wsunęła
się w zamek nacięty na wrzecionie zaworu,
–
zamocować siłownik do zaworu przy pomocy obejmy znajdującej się w stopie siłownika,
–
odkręcić wkręty mocujące osłonę mechanizmu siłownika do korpusu siłownika i zdjąć
osłonę.
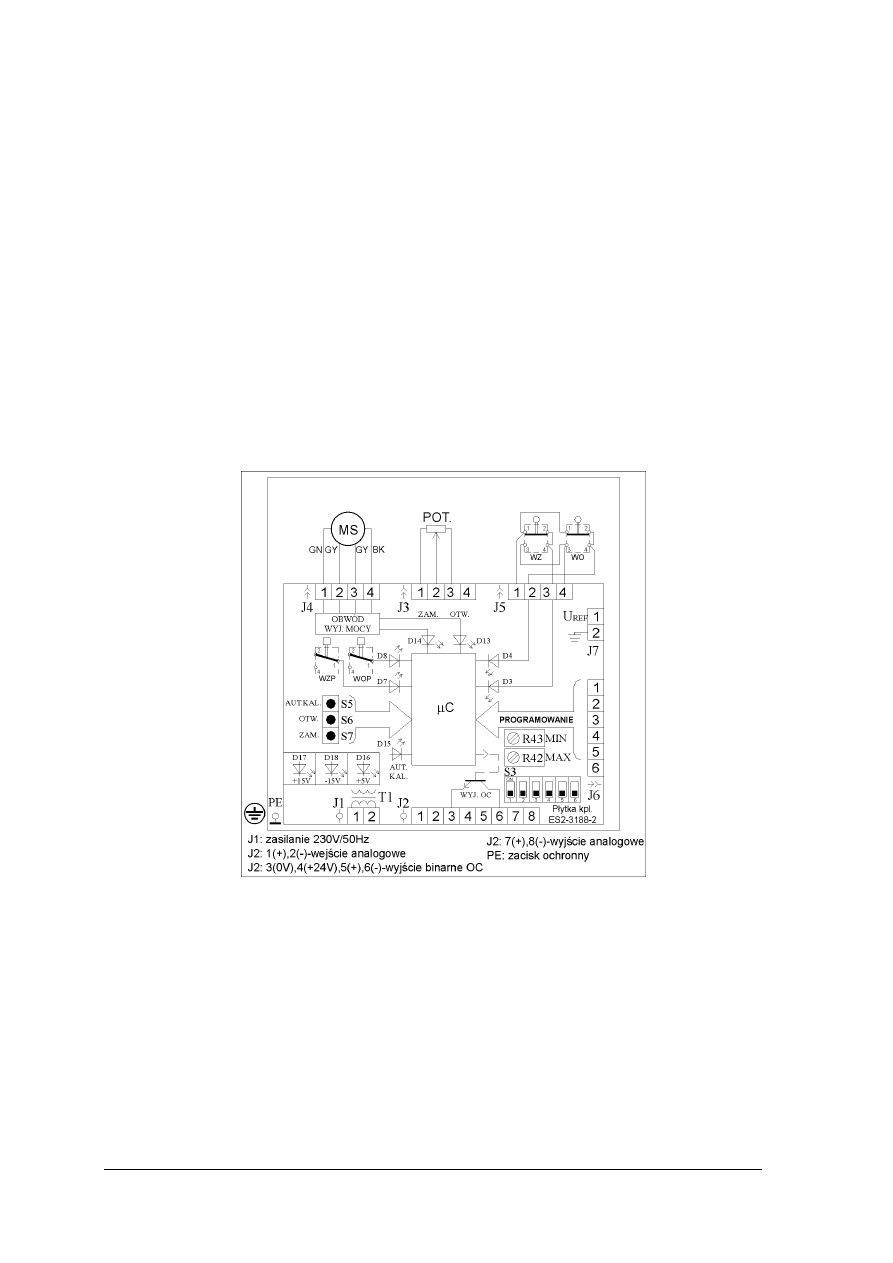
Na rysunku 41 przedstawiono schemat blokowy połączeń wewnętrznych siłownika
sterowanego sygnałem analogowym – zasilanego napięciem 230V/50Hz.
Rys. 41.
Schemat połączeń siłownika z mikrokontrolerem [CONTROLMATICA S.A.]
Złącza: J3, J4, J5 są wykorzystywane do wewnętrznych połączeń siłownika. Złącze J7
jest wewnętrznym złączem kontrolnym, złącze J6 służy do programowania mikrokontrolera
w procesie produkcji. Zasilanie siłownika 230V/50Hz należy podłączyć do zacisków
1 i 2 złącza J1. Maksymalny przekrój żył przewodów wprowadzanych do zacisków złącza J1
wynosi 1,5mm
2
. Sygnały we/wy siłownika złącze J2. Maksymalny przekrój żył przewodów
wprowadzanych do zacisków złącza J2 wynosi 1mm
2
:
–
sygnał wejściowy analogowy: 0...20mA, 4...20mA, 0...10V, 2...10V
−
(zaciski 1, 2). Dla
wartości maksymalnej sygnału sterującego trzpień siłownika osiągnie położenie
minimalnego wysunięcia (położenie „OTWARCIE”), a dla wartości minimalnej sygnału
trzpień
siłownika
osiągnie
położenie
maksymalnego
wysunięcia
(położenie
„ZAMKNIĘCIE”). Wyboru rodzaju sygnału prądowy/napięciowy należy dokonać
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
wykorzystując przełącznik S3 (suwaki 1 i 2, tab. 1), standard sygnału 0...20mA, 0...10V
czy 4...20mA, 2...10V zależy z kolei od ustawienia suwaka nr 5 przełącznika S3, a wybór
charakterystyki sterowania (normalna/odwrotna) dokonuje się za pomocą suwaka nr 6.
–
sygnał wyjściowy analogowy 0...20mA, 4...20mA, 0...10V, 2...10V
−
(zaciski 7, 8).
Standardowo maksymalną wartość sygnału wyjściowego uzyskuje się w położeniu
„OTWARCIE” trzpienia siłownika, natomiast minimalną wartość sygnału uzyskuje
się w położeniu „ZAMKNIĘCIE”. Wyboru rodzaju sygnału prądowy/napięciowy należy
dokonać za pomocą przełącznika S3 (suwak 4)
−
wyjaśnienia w tabeli 1. Dodatkowo
przełącznik
S3
(suwak
6)
umożliwia
konwersję
sygnału
wyjściowego
z 0(0V)...20mA(10V) na 20mA(10V)...0mA(0V) poprzez realizację tzw. „odwrotnej”
charakterystyki sterowania (obowiązuje także dla „niezerowej” wartości początkowej
sygnału, tj. 4mA lub 2V).
–
sygnał wyjściowy binarny: +24V/200mA – zasilanie dołączyć do zacisków 4(+24V)
i 3(0V), a obciążenie należy łączyć na zaciski 5 i 6. Binarną sygnalizację stanu
przeciążenia siłownika, równoznaczną z zadziałaniem jednego z wyłączników
przeciążeniowych WZP i WOP, zapewnia separowany galwanicznie sygnał wyjściowy
typu OC (24VDC, 200mA). Zwarcie zacisków (5) i (6) spowoduje uszkodzenie stopnia
wyjściowego.
Tabela 1. Numery suwaka S3 i odpowiadające mu funkcje [opracowanie własne]
Nr
suwaka
przełącznika S3
Funkcja w pozycji
„OFF”
Funkcja w pozycji „ON”
Opis funkcji
1
Sygnał wej.
0(2)...10V
Sygnał wej. 0(4)...20mA
Zakres
i
rodzaj
sygnału
wejściowego
2
Sygnał wej.
0(2)...10V
Sygnał wej. 0(4)...20mA
Zakres
i
rodzaj
sygnału
wejściowego
3
Sterowanie
sygnałowe
Sterowanie ręczne
Tryb sterowania siłownika
1)
4
Sygnał
wyj.
0(4)...20mA
Sygnał wyj. 0(2)...10V
Rodzaj sygnału wyjściowego
5
0(0V)...20mA(10V)
4(2V)...20mA(10V)
Zakres sygnału wej. i wyj.
6
Normalna
Odwrotna
Charakterystyka sterowania
2)
Uwagi do tabeli 1:
1) Tryb „ręczny” sterowania siłownika (suwak nr 3 w pozycji „ON”) umożliwia sterowanie
trzpieniem siłownika za pomocą umieszczonych na płytce elektronicznej lokalnych
przycisków S6 i S7.
2) Charakterystyka sterowania siłownika jest to zależność wartości skoku siłownika
od wartości analogowego sygnału wejściowego sterującego. Określenie charakterystyki
jako „normalna” oznacza, że przy rosnącym sygnale wejściowym trzpień siłownika
wsuwa się, czyli przemieszcza się w kierunku pełnego otwarcia (przy charakterystyce
określonej jako „odwrotna” trzpień będzie się wysuwał).
Funkcja ta jest realizowana tylko przy nieaktywnej binarnej sygnalizacji stanu
przeciążenia siłownika. Po zmianie wyboru charakterystyki sterowania zaleca
się przeprowadzenie autokalibracji skoku siłownika.
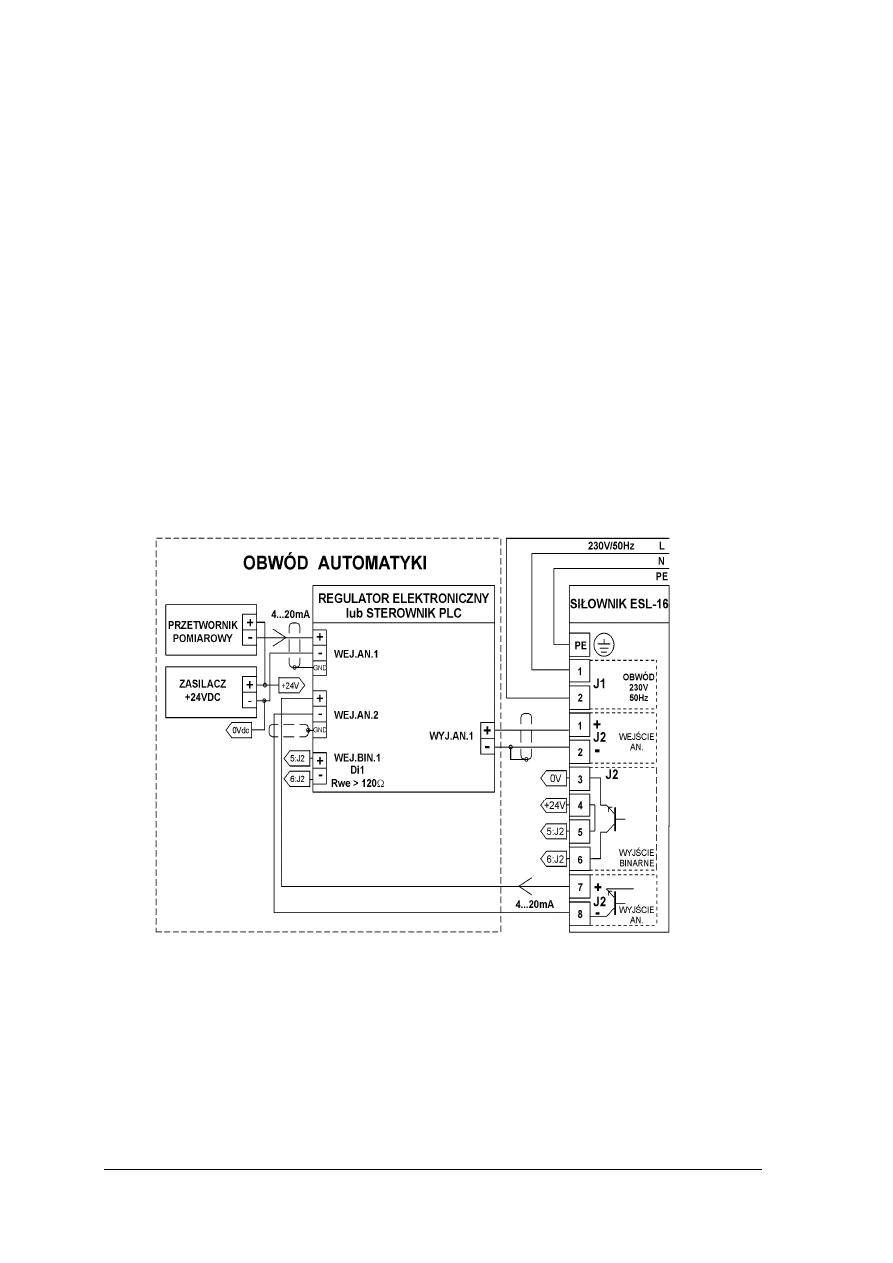
Przykład aplikacji siłownika zasilanego z sieci 230V/50Hz i sterowanego sygnałem
analogowym w układzie automatyki przedstawiono na rysunku 42. W przedstawionym
przykładzie regulator generuje sygnał analogowy (WYJ. AN1) sterujący pracą siłownika.
Siłownik wysyła do regulatora sygnał (mA lub V) informujący o aktualnym położenia
trzpienia.
Ustawianie wyłączników krańcowych w siłowniku sterowanym sygnałem analogowym:
–
zdjąć osłonę mechanizmu siłownika,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
–
ustawić suwaki przełącznika S3 wg parametrów podanych w tabeli 1, zgodnie
ze standardem
wejściowego
sygnału
sterującego
oraz
wyjściowego
sygnału
odwzorowania położenia.
–
w przypadku braku napięcia zasilającego siłownik założyć osłonę siłownika bez
przykręcania wkrętów mocujących, a przez wciśnięcie i pokręcanie pokrętła napędu
ręcznego dokonać pełnego przejścia w kierunku „otwieranie” (wsuwanie trzpienia)
i „zamykanie” (wysuwanie trzpienia), w celu dostosowania położenia wyłączników
krańcowych WZ i WO do wymagań mechanicznych stosowanego zaworu,
–
jeżeli przy regulacji położenia wyłączników WZ i WO do przesuwania trzpienia
siłownika jest wykorzystywany napęd silnika, dla bezpieczeństwa przed podaniem
napięcia zasilającego do siłownika należy napędem ręcznym doprowadzić trzpień
siłownika do pozycji środkowej,
–
suwak 3 przełącznika S3 ustawić w pozycję ON „STEROWANIE RĘCZNE”,
–
podać napięcie zasilające, naciskając przyciski S7 „OTWÓRZ” lub S6 „ZAMKNIJ”
sterować trzpieniem siłownika i następnie dokonać regulacji położenia wyłączników
krańcowych WZ i WO,
–
suwak 3 przełącznika S3 ustawić w pozycję OFF „STEROWANIE SYGNAŁOWE”.
Jeżeli ustawianie WZ i WO wykonywano bez pomocy silnika należy sprawdzić
ustawienie w pozycji „OFF” suwaka nr 3 przełącznika S3 i podać napięcie zasilające
siłownik.
Rys. 42.
Schemat połączenia siłownika z regulatorem [CONTROLMATICA S.A.]
Autokalibracja skoku siłownika
Autokalibracja skoku siłownika jest to proces polegający na automatycznym
dostosowaniu się zakresu sygnału sterującego wejściowego i sygnału wyjściowego
odwzorowania położenia siłownika do skoku ustalonego przez dowolne ustawienie
wyłączników krańcowych WZ i WO. To inteligentne działanie zapewnia właściwe
dopasowanie siłownika do dowolnego zaworu o skoku nieprzekraczającym skoku
znamionowego siłownika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
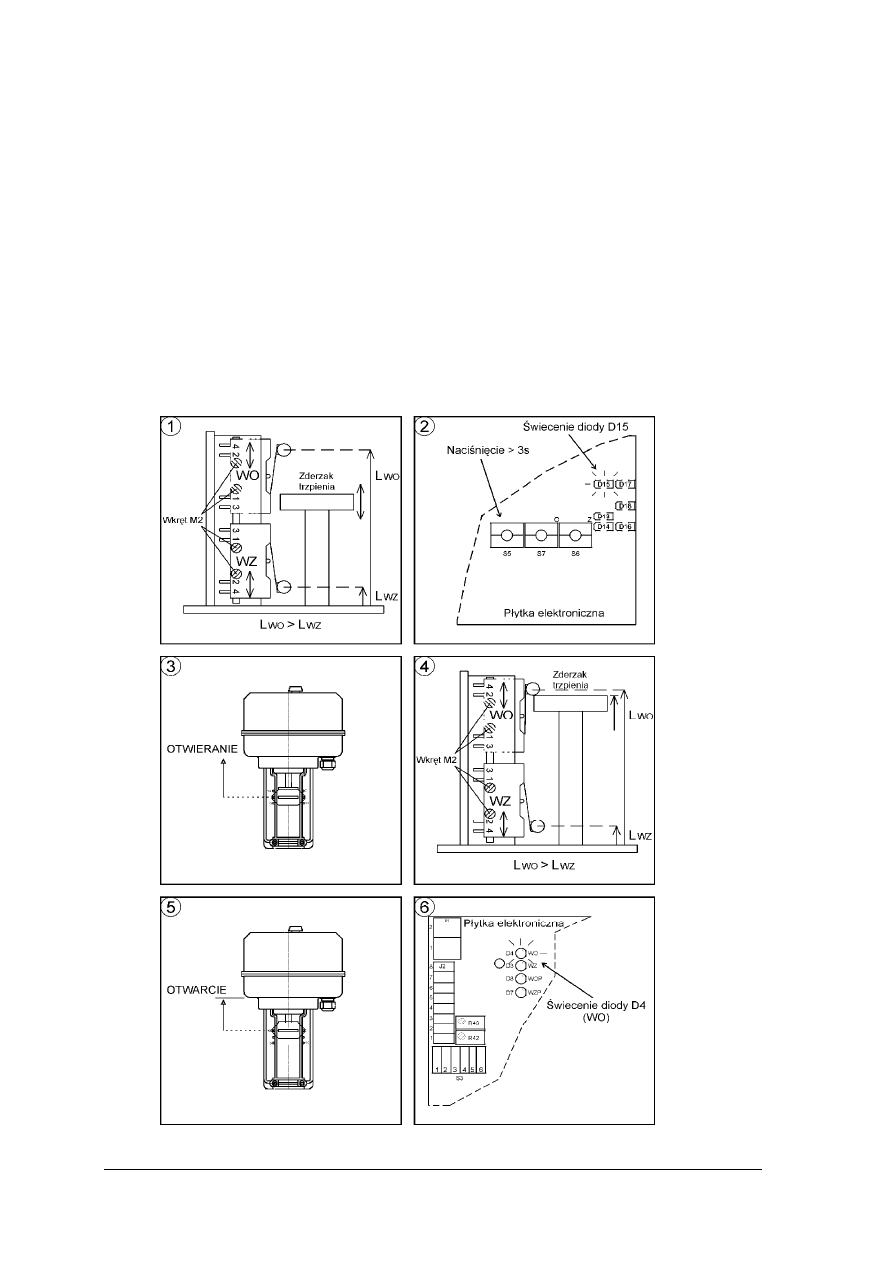
Proces automatycznej kalibracji uruchamia się po wcześniejszym ustaleniu położeń
wyłączników krańcowych WZ i WO. Inicjację autokalibracji siłownika wywołuje się przez
naciśnięcie i przytrzymanie przez ok. 3s przycisku S5 do chwili zapalenia się diody D15
(czerwona). Trzpień siłownika porusza się w kierunku na otwieranie i trwa to do chwili
uruchomienia wyłącznika położenia WO „OTWARCIE”, co sygnalizuje zapalenie się diody
D4. W tym momencie mikrokontroler zapisuje do swojej nieulotnej pamięci EEPROM
wartość skoku odpowiadającą położeniu „OTWARCIE”. Po dokonaniu zapisu pozycji WO,
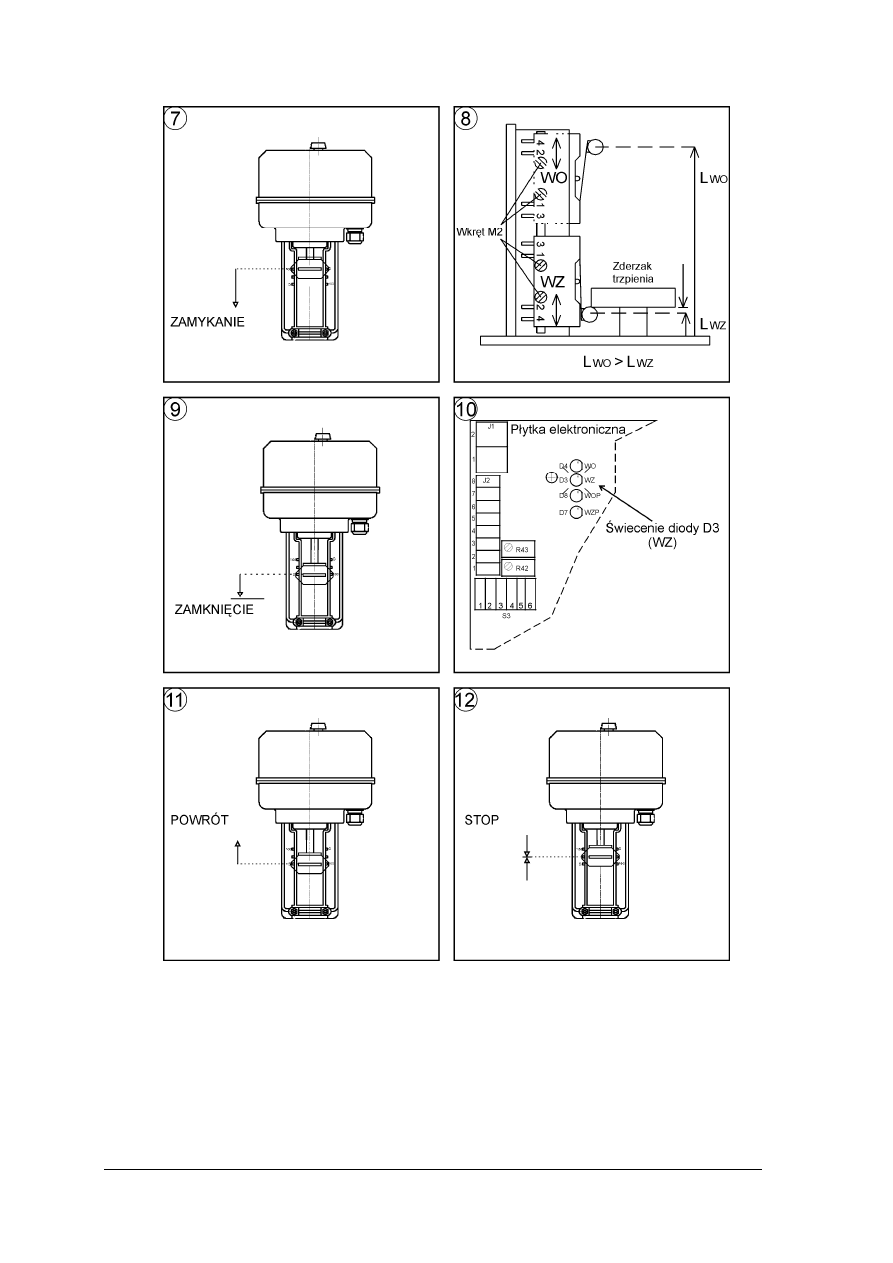
siłownik rozpoczyna ruch w kierunku na zamykanie. Uruchomienie wyłącznika WZ
w położeniu „ZAMKNIĘCIE” jest sygnalizowane zapaleniem się diody D3. Mikrokontroler
zapisuje do swojej nieulotnej pamięci EEPROM wartość skoku odpowiadającą położeniu
„ZAMKNIĘCIE”. Po dokonaniu zapisu pozycji WZ, proces automatycznej kalibracji zostaje
zakończony (dioda sygnalizacyjna D15 gaśnie) i siłownik przechodzi do stanu „PRACA”,
a trzpień siłownika wykonuje ruch w kierunku pozycji odpowiadającej bieżącej wartości
wejściowego sygnału sterującego. Na rysunkach 43 i 44 przedstawia się proces autokalibracji
siłownika, w którym wyróżniono 12 kroków oznaczonych na rysunkach pozycjami od 1 do12.
12. 12.
Rys. 43. 6 kroków procesu autokalibracji siłownika [CONTROLMATICA S.A.]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Rys. 44. Kolejne 6 kroków procesu autokalibracji siłownika [CONTROLMATICA S.A.]
UWAGA: W przypadku wymiany potencjometru POT z uwagi na tolerancję jego
rezystancji znamionowej należy dokonać nastawy wartości minimalnej i maksymalnej
wyjściowego sygnału odwzorowania położenia wykorzystując potencjometry dostrojcze R42
(nastawa wartości maksymalnej) i R43 (nastawa wartości minimalnej „zerowej” tzn. 0mA lub
0V
−
nie dotyczy wartości 4mA i 2V). Po zakończeniu autokalibracji siłownik jest gotowy do
podjęcia pracy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
4.7.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaką funkcję spełnia mikrokontroler w siłowniku?
2. Jakim sygnałem analogowym może być sterowany siłownik?
3. Z jakich elementów zbudowany jest siłownik silnikowy?
4. Dokąd kierowany jest sygnał z nadajnika położenia siłownika?
5. Czego dotyczy autokalibracja?
6. Jaki może być skok elementu wyjściowego siłownika liniowego?
4.7.3. Ćwiczenia
Ćwiczenie1
Ustal położenie wyłączników krańcowych w siłowniku ESL–16 sterowanym prądowo
zgodnie z wytycznymi przedstawionymi na stronie 49 materiału nauczania. Podczas
przeprowadzenia tych czynności przestrzegaj przepisy bezpieczeństwa zgodnie z zaleceniami
w DTR dla tego siłownika.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować zakres czynności ustawiania wyłączników krańcowych,
2) podłączyć siłownik do układu zasilania,
3) przeprowadzić proces ustawienia wyłączników krańcowych,
4) sprawdzić działanie siłownika po regulacji.
Wyposażenie stanowiska pracy:
–
siłownik ESL–16 produkcji CONTROLMATICA S.A.,
–
DTR na powyższy siłownik,
–
przewody łączące
–
katalogi siłowników.
Ćwiczenie 2
Przeprowadź autokalibrację siłownika ESL–16 sterowanego prądowo zgodnie
z zaleceniami przedstawionymi na stronie 42–43 oraz rysunkami 43 i 44 zawartymi
w Materiale nauczania Poradnika dla ucznia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) uważnie przeczytać zakres czynności autokalibracji siłownika,
2) podłączyć siłownik do układu zasilania,
3) przeprowadzić proces autokalibracji,
4) sprawdzić działanie siłownika po regulacji.
Wyposażenie stanowiska pracy:
–
siłownik ESL–16 produkcji CONTROLMATICA S.A.,
–
DTR na powyższy siłownik,
–
przewody łączące,
–
katalogi siłowników.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
4.7.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
scharakteryzować elementy ustawienia skoku siłownika?
2)
wyjaśnić zasady ustawienia skoku siłownika?
3)
wyjaśnić jak przeprowadzamy autokalibrację?
4)
określić jakie są sygnały wyjściowe z siłownika?
5)
wyjaśnić co jest celem autokalibracji?
6)
przeprowadzić ustawienie wyłączników krańcowych?
7)
dopasować siłownik do zaworu?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawdziwa.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi, stawiając w odpowiedniej
rubryce znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem
a następnie ponownie zakreślić odpowiedź prawidłową.
6. Pracuj samodzielnie, gdyż tylko wówczas będziesz miał satysfakcję z wykonanego
zadania.
7. Jeśli udzielanie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci czas wolny.
8. Na rozwiązanie testu masz 25 minut.
Powodzenia!

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
ZESTAW ZADAŃ TESTOWYCH
1. Wirnik silnika jednofazowego jest
a) uzwojony.
b) nieuzwojony.
c) częściowo uzwojony.
d) zbudowany z magnesów.
2. Silnik trójfazowy można podłączyć do sieci jednofazowej przez
a) zwarte uzwojenia z opornikiem.
b) zwarte uzwojenia z kondensatorem.
c) zwarte uzwojenia z cewką.
d) zwarte uzwojenia z opornikiem i cewką.
3. Włączanie silnika przez przełącznik gwiazda–trójkąt służy do
a) zmiany kierunku obrotów silnika.
b) zwiększenia momentu rozruchowego.
c) zmniejszenia momentu rozruchowego.
d) zwiększenia prędkości.
4. Silniki pierścieniowe mają uzwojony
a) wirnik.
b) stojan.
c) wirnik i stojan.
d) dodatkowe uzwojenie.
5. Zmiana kierunku obrotów silnika trójfazowego polega na
a) zamianie dwóch faz.
b) zamianie trzech faz.
c) zamianie zera z fazą.
d) dołączeniu dodatkowego napięcia.
6. Prędkość obrotów silnika krokowego zależy od
a) napięcia.
b) prądu.
c) częstotliwości.
d) napięcia i prądu.
7. Typ siłownika pneumatycznego o działaniu prostym oznacza
a) prostą budowę.
b) wzrost ciśnienia wysuwa wrzeciono.
c) wzrost ciśnienia wsuwa wrzeciono.
d) prosty ruch.
8. Ustawnik pozycyjny w siłowniku pneumatycznym
a) zmniejsza histerezę.
b) zwiększa histerezę.
c) zwiększa skok.
d) zmniejsza skok.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
9. Siłowniki hydrauliczne korbowe charakteryzują się
a) liniowym ruchem.
b) obrotami korby.
c) kątowym ruchem.
d) liniowym i obrotowym ruchem.
10. Zawór sterujący 3/2 ma
a) dwie drogi i trzy położenia.
b) trzy drogi i dwa położenia.
c) dwie drogi i dwa położenia.
d) trzy drogi i trzy położenia.
11. Zawór sterujący 5/3 ma
a) jedno położenie zerowe.
b) dwa położenia zerowe.
c) pięć położeń zerowych.
d) trzy położenia zerowe.
12. Grzybek w zaworze dwugniazdowym ma na celu
a) poprawę szczelności.
b) odciążenie siłownika.
c) mieszanie dwóch czynników.
d) zwiększenie dokładności.
13. Dławica w zaworze służy do
a) uszczelnienia wrzeciona.
b) dławienia ciśnienia.
c) poprawę dokładności zaworu.
d) dławienie przepływu.
14. Współczynnik przepływu jest
a) temperaturą czynnika.
b) natężeniem przepływu wody.
c) wymiarem zaworu.
d) kształtem grzybka.
15. Charakterystyka robocza zaworu zależy od
a) ciśnienia wymuszającego.
b) charakterystyki wewnętrznej instalacji.
c) współczynnika przepływu.
d) temperatury.
16. Prędkość elementu wyjściowego siłownika elektrycznego zależy od
a) rodzaju silnika.
b) napięcia.
c) prądu.
d) zabezpieczenia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
17. Siłownik elektryczny jest sterowany sygnałem nieciągłym przez
a) regulator z wyjściem dwustanowym.
b) regulator z wyjściem prądowym.
c) regulator z wyjściem cyfrowym.
d) regulator z wyjściem trójstanowym.
18. Siłowniki elektryczne wahliwe służą do napędu
a) zasuw.
b) zaworów liniowych.
c) przepustnic.
d) klap.
19. Wyłączniki krańcowe w siłowniku służą do
a) ograniczenia prądu.
b) ograniczenia skoku.
c) ograniczenia napięcia.
d) regulacji przeciążenia.
20. Autokalibracja siłownika to
a) dostosowanie prędkości.
b) dostosowanie skoku do sygnału wejściowego i wyjściowego.
c) dostosowanie przeciążenia.
d) dostosowanie kształtu zaworu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
KARTA ODPOWIEDZI
Imię i nazwisko..........................................................................................
Obsługiwanie zespołów napędowych i nastawczych
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
6. LITERATURA
1. Dąbrowski A.: Pracownia techniczna mechaniki precyzyjnej. WSiP, Warszawa 1985
2. Kamiński L.: Technologia i pomiary dla ZSZ. WSiP, Warszawa 1985
3. Komor Z.: Pracownia automatyki. WSiP, Warszawa 1996
4. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 1994
5. Olszewski M.: Mechatronika. REA, Warszawa 2002
6. Siemieniako F.: Automatyka i robotyka. WSiP, Warszawa 1996
7. Stein Z.: Maszyny elektryczne. WSiP, Warszawa 1999
Czasopisma specjalistyczne:
—
Mechanik, Przegląd mechaniczny, Bezpieczeństwo Pracy, Maszyny technologie
materiały, Elektronika Praktyczna, Elektronika, Pomiary Automatyka Kontrola, Pomiary
Automatyka Robotyka
Wyszukiwarka
Podobne podstrony:
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 03 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 01 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 02 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z3 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 03 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o2 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] o1 03 n
więcej podobnych podstron