Fizyka - Literatura
Autor
Tytuł
Wyd.
D. Halliday,
R. Resnick,
J. Walker
Podstawy fizyki, cz. 1-5, PWN, Warszawa
2003
A. Rogalski
Podstawy fizyki dla elektroników,
Skrypt WAT
2002
J. Orear
Fizyka, cz. 1 i 2, WNT, Warszawa
1997
Cz. Bobrowski Fizyka, WNT, Warszawa
1997
Raszewski i
inni
Fizyka ogólna. Przykłady i zadania z fizyki, cz. I.
Rozwiązania i odpowiedzi do zadań z fizyki, cz.II.
Skrypt WAT
1994
T. Kostrzyński
i inni
Ćwiczenia laboratoryjne z fizyki, Skrypt WAT
2007
WWW
www.wtc.wat.edu.pl/ift/dydaktyka.html
Istota fizyki
poszukiwanie i poznawanie
podstawowych praw przyrody
fizyka klasyczna – opis makroświata
fizyka współczesna – opis mikroświata
kamienie milowe: teoria względności
i mechanika kwantowa
FIZYCZNE PODSTAWY
MECHANIKI
Kinematyka zajmuje się
opisem ruchu ciał bez
uwzględniania przyczyn
które ten ruch wywołały
(Galileusz, XVII w.)
Podstawowe definicje
układ odniesienia - kartezjański
układ współrzędnych prostokątnych
punkt materialny- ciało o znikomo
małych rozmiarach o danej masie i
położeniu
położenie cząstki – podanie
współrzędnych cząstki (wektor
położenia)
ruch – zmiana położenia względem
układu odniesienia
tor (trajektoria) cząstki – linia którą
zakreśla poruszająca się cząstka
przemieszczenie
k
z
j
y
i
x
z
y
x
r
r
r
r
r
⋅
+
⋅
+
⋅
=
=
)
,
,
(
ϕ
θ
)
,
,
(
θ
ϕ
r
r =
r
ϕ
θ
cos
sin
r
x =
ϕ
θ
sin
sin
r
y =
θ
cos
r
z =
w układzie sferycznym
X
Y
Z
A
r
z
y
x
k
r
j
r
i
r
A
B
r
r
r
r
r
r
−
=
Δ
B
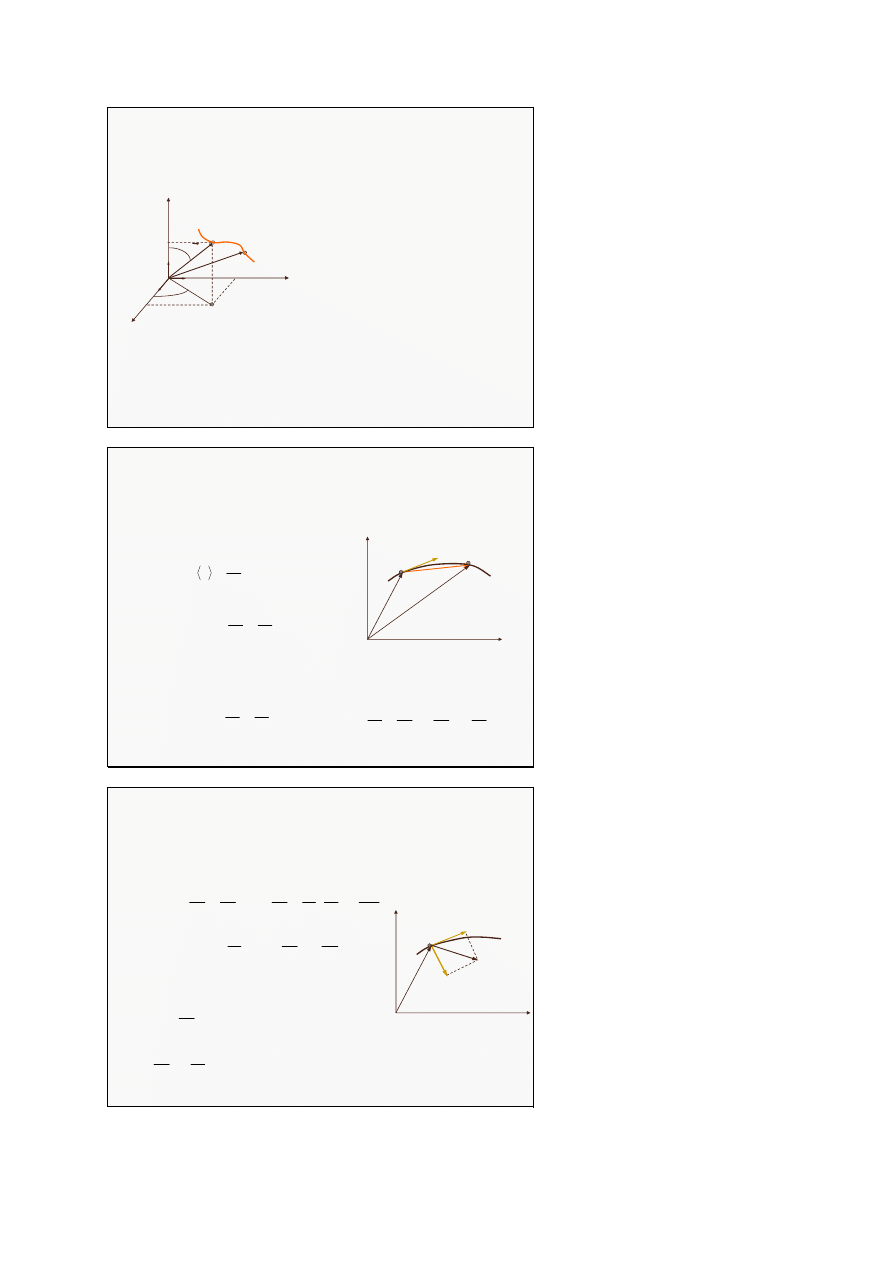
Prędkość
cząstka porusza się po krzywoliniowym torze z
punktu A do B w czasie Δt przebywając drogę Δs
prędkość średnia
prędkość chwilowa
wartość liczbowa prędkości
jest równa pochodnej drogi
względem czasu
t
r
v
Δ
Δ
=
r
r
dt
r
d
t
r
v
t
r
r
r
=
Δ
Δ
=
→
Δ
lim
0
dt
ds
t
s
v
t
=
Δ
Δ
=
→
Δ
lim
0
k
dt
dz
j
dt
dy
i
dt
dx
dt
r
d
v
r
r
r
r
r
+
+
=
=
y
x
A
B
( )
t
rr
(
)
r
r
t
t
r
r
r
r
Δ
+
=
Δ
+
rr
Δ
s
Δ
vr
tor
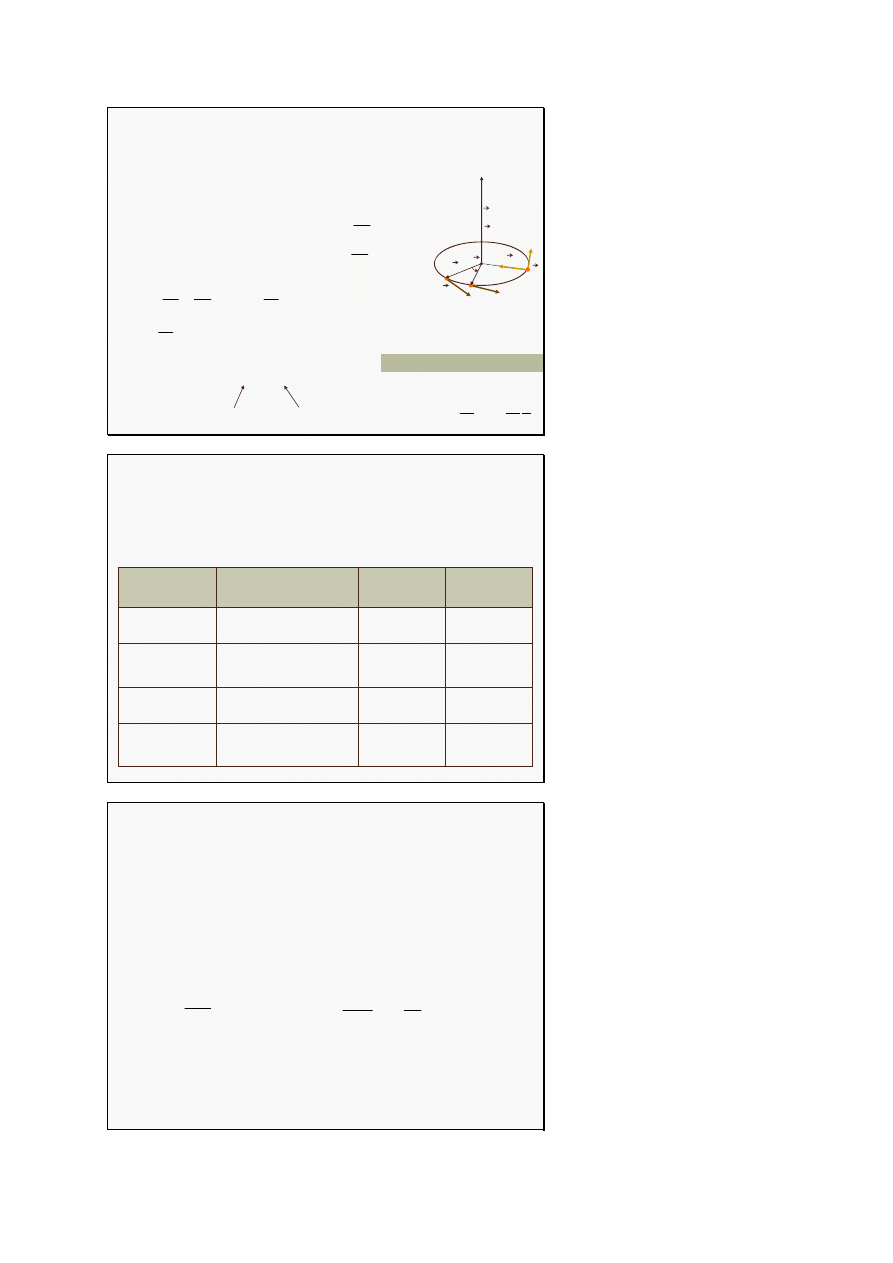
Przyspieszenie
dt
v
d
t
v
a
t
r
r
r
=
Δ
Δ
=
→
Δ
lim
0
2
2
dt
r
d
dt
r
d
dt
d
dt
v
d
a
r
r
r
r
=
⎟
⎠
⎞
⎜
⎝
⎛
=
=
t
i
v
v
r
r =
( )
v
dt
i
d
i
dt
dv
i
v
dt
d
a
t
t
t
r
r
r
r
+
=
=
n
t
a
a
a
r
r
r
+
=
dt
dv
a
t
=
r
v
v
dt
di
a
t
n
2
=
=
przyspieszenie styczne
szybkość zmiany wartości v
przyspieszenie normalne
szybkość zmiany kierunku ruchu
(r – promień krzywizny)
i
t
wektor jedn.
styczny do toru
y
x
( )
t
rr
ar
t
ar
tor
n
ar
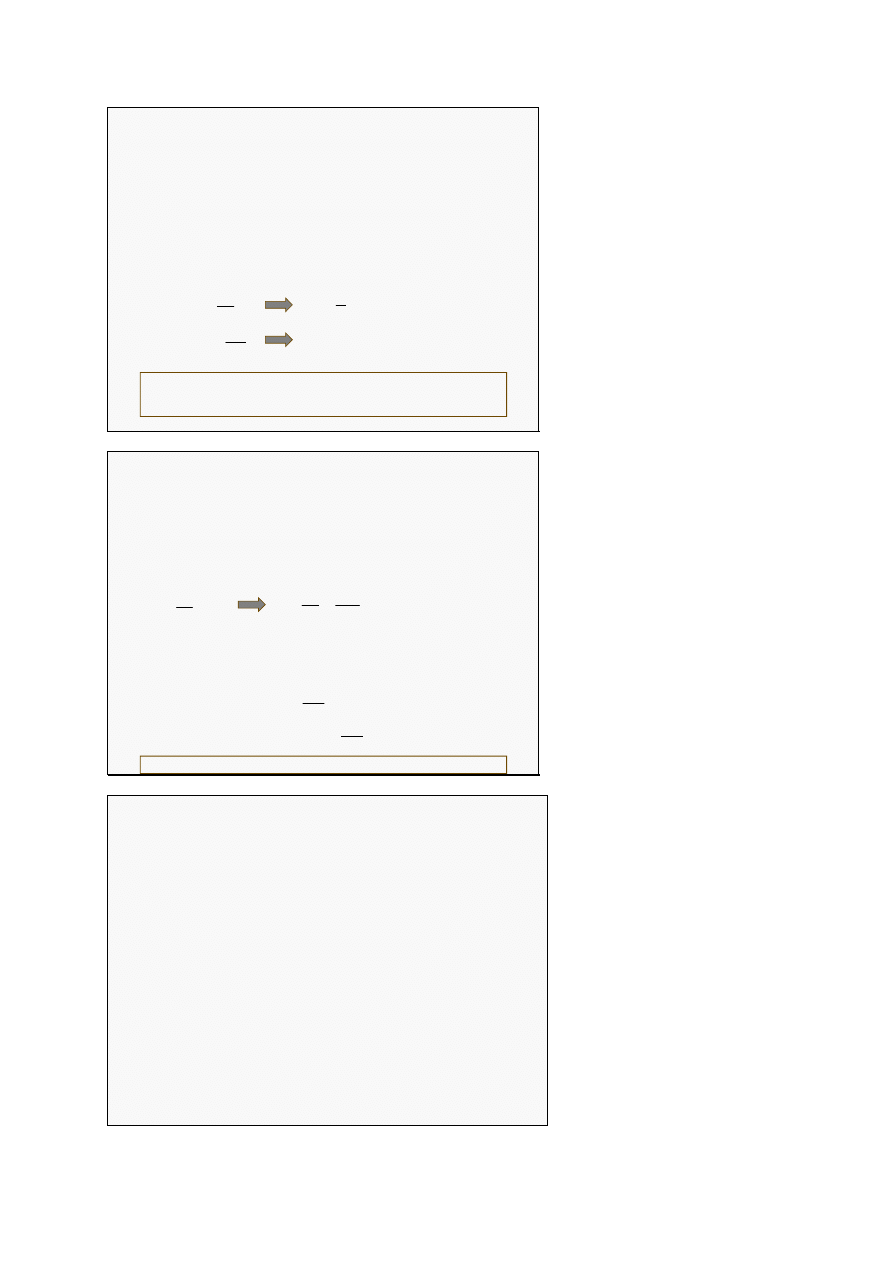
Ruch po okręgu
Ruch po okręgu - przypadek ruchu krzywoliniowego,
gdy promień jest stały r=const
r
v
r
r
r
×
=
ω
ω - prędkość kątową
ε - przyspieszenie kątowe
Przyspieszenie liniowe:
dt
d
α
ω
r
r =
dt
d
ω
ε
r
r =
dt
r
d
r
dt
d
dt
v
d
a
r
r
r
r
r
r
×
+
×
=
=
ω
ω
Przyspieszenie styczne i normalne (dośrodkowe)
r
r
a
a
a
n
t
r
r
r
r
r
r
⋅
−
×
=
+
=
2
ω
ε
)
(
)
(
)
(
b
a
c
c
a
b
c
b
a
r
r
r
r
r
r
r
r
r
⋅
−
⋅
=
×
×
tożsamość
(
)
(
)
(
)
r
r
r
r
v
dt
r
d
r
r
r
r
3
2
1
r
r
r
r
r
r
r
r
r
r
2
0
ω
ω
ω
ω
ω
ω
ω
ω
ω
−
=
⋅
⋅
−
⋅
⋅
=
×
×
=
×
=
×
=
r
s
⋅
Δ
=
Δ
α
r
v
⋅
=
ω
W układzie biegunowym do opisu ruchu stosujemy:
α - położenie kątowe
r
v
Δs
Δα
ω
ε
a
t
a
n
r
r
r
v
r
r
v
a
n
r
r
r
2
2
2
−
=
−
=
Dynamika – badanie przyczyn
ruchu (Newton, XVIII w.)
Oddziaływania fundamentalne
Oddziaływania
Źródło
Intensywność
względna
Promień
działania
Grawitacyjne
Masa
10
-39
Daleko-
zasięgowe
Słabe
Cząstki elementarne
10
-15
Krótko-
zasięgowe
(10
-15
m)
Elektro-
magnetyczne
Ładunki elektryczne
10
-2
Daleko-
zasięgowe
Jądrowe (silne)
Hadrony (protony,
neutrony, mezony)
1
Krótko-
zasięgowe
(10
-15
m)
Zasady dynamiki Newtona
Ciało pozostaje w spoczynku lub porusza się
ruchem jednostajnym prostoliniowym dopóki nie
zostanie zmuszone za pomocą odpowiednich sił do
zmiany tego stanu (zasada bezwładności)
Szybkość zmiany pędu ciała jest równa sile
wypadkowej działającej na to ciało
Gdy dwa ciała oddziaływują wzajemnie to siła
wywierana przez ciało drugie na ciało pierwsze jest
równa i przeciwnie skierowana do siły z jaką ciało
pierwsze działa na ciało drugie
A
B
B
A
F
F
⇐
⇐
−
=
r
r
wyp
F
dt
p
d
r
r
=
wyp
F
a
m
dt
v
d
m
dt
v
dm
r
r
r
r
=
=
=
(
)
t
v
r
F
F
,
, r
r
r
r
=
dt
v
d
m
a
m
F
r
r
r
=
=
dt
m
F
v
∫
=
r
r
Z równania ruchu można otrzymać prędkość i tor ciała w
dowolnej chwili czasu , odtworzyć ruch przeszły i przewidzieć
poruszanie się w przyszłości ⇒ charakter deterministyczny
Jeżeli znamy masę i siłę działającą na ciało to
II zasada Newtona określa tzw. równanie ruchu
dt
v
r
∫
= r
r
Równanie ruchu
(
)
dt
r
d
t
r
v
v
r
r
r
r
=
=
,
Przykład rozwiązywania
równania ruchu
gdzie stałą C
1
wyznaczamy z warunków
początkowych: x
0
, v
0
– położenie i
prędkość w początkowej chwili czasu t
0
=0
Z równania ruchu otrzymujemy wyrażenia prędkość i tor ciała
Rozpatrzmy ruch jednowymiarowy pod wpływem stałej siły F
masa ciała m, przyspieszenie a=F/m=const.
Oś OX wybieramy w kierunku działania siły, więc
(
)
0
,
0
,
x
r
=
r
2
2
dt
x
d
dt
dv
a
=
=
1
C
at
dt
a
v
+
=
=
∫
( )
1
1
0
0
0
C
C
a
v
v
=
+
⋅
=
=
0
v
at
v
+
=
(
)
2
0
2
0
2
C
t
v
at
dt
v
at
dt
v
x
+
+
=
+
=
=
∫
∫
( )
2
0
0
C
x
x
=
=
0
0
2
2
x
t
v
at
x
+
+
=
(
)
0
,
0
,
F
F
=
r
dt
v
d
a
r
r =
(
)
0
,
0
,
v
v
=
r
Zasady zachowania –
najbardziej
fundamentalne prawa
wyrażają stałość danej wielkości
fizycznej w trakcie określonych
procesów fizycznych
zasady zachowania: pędu, momentu
pędu, energii;
ładunku, liczby nukleonów, liczby
leptonowej
Prawo zachowania energii
mechanicznej
Energia mechaniczna układu jest sumą energii potencjalnej
i kinetycznej wszystkich jego składników
gdy układ jest izolowany od otoczenia i siła zachowawcza
wykonuje pracę W
AB
nad jednym z ciał układu to zachodzi
zmiana energię kinetycznej ciała w energię potencjalną układu
jeżeli wszystkie siły działające na cząstkę są zachowawcze, to
całkowita energia cząstki w każdym jej położeniu jest
wielkością stałą, zwaną całkowitą energią mechaniczną
AB
W
K =
Δ
AB
W
U
−
=
Δ
U
+
K
E
mech
=
mech
B
B
A
A
E
const
=
U
+
K
=
U
+
K
=
(
)
A
B
A
B
U
U
=
K
K
−
−
−
Zasada zachowania energii
jeżeli w układzie oprócz sił zachowawczych działa siła
niezachowawcza (rozpraszająca) np. siła tarcia, to zmiana
energii kinetycznej cząstek jest równa:
korzystając z definicji energii potencjalnej otrzymujemy, że
praca sił rozpraszających jest <0 i równa zmianie E
mech
energia układu izolowanego może przekształcać się z jednej
postaci w inną, jednak energia całkowita w jej różnorodnych
formach nie może być ani stworzona z niczego, ani też
unicestwiona
całkowita energia układu izolowanego nie może się zmieniać
mech
A
B
A
B
AB
E
U
K
U
U
K
K
rozp
W
Δ
=
Δ
+
Δ
=
−
+
−
=
)
(
)
(
)
(
)
(
)
(
rozp
W
zach
W
W
K
AB
AB
AB
+
=
=
Δ
0
=
Δ
+
Δ
+
Δ
wew
E
U
K
(
)
rozp
W
E
bo
AB
wew
−
=
Δ
Zasada zachowania pędu
całkowity pęd izolowanego i zamkniętego układu cząstek pozostaje
stały
(jeśli na układ cząstek nie działają siły zewnętrzne lub ich wypadkowa
jest równa zeru, to całkowity pęd układu nie ulga zmianie)
pęd początkowy jest równy pędowi końcowemu
jeśli wypadkowa sił zewnętrznych jest wzdłuż pewnej osi równa zeru,
to składowa pędu w tym kierunku nie ulega zmianie
const
v
m
v
m
v
m
v
m
N
i
i
i
N
N
=
=
+
+
+
∑
=1
2
2
1
1
r
r
L
r
r
konc
pocz
p
p
r
r
=
konc
x
pocz
x
p
p
=
const
p
dt
dp
F
=
⇒
=
⇒
=
0
0
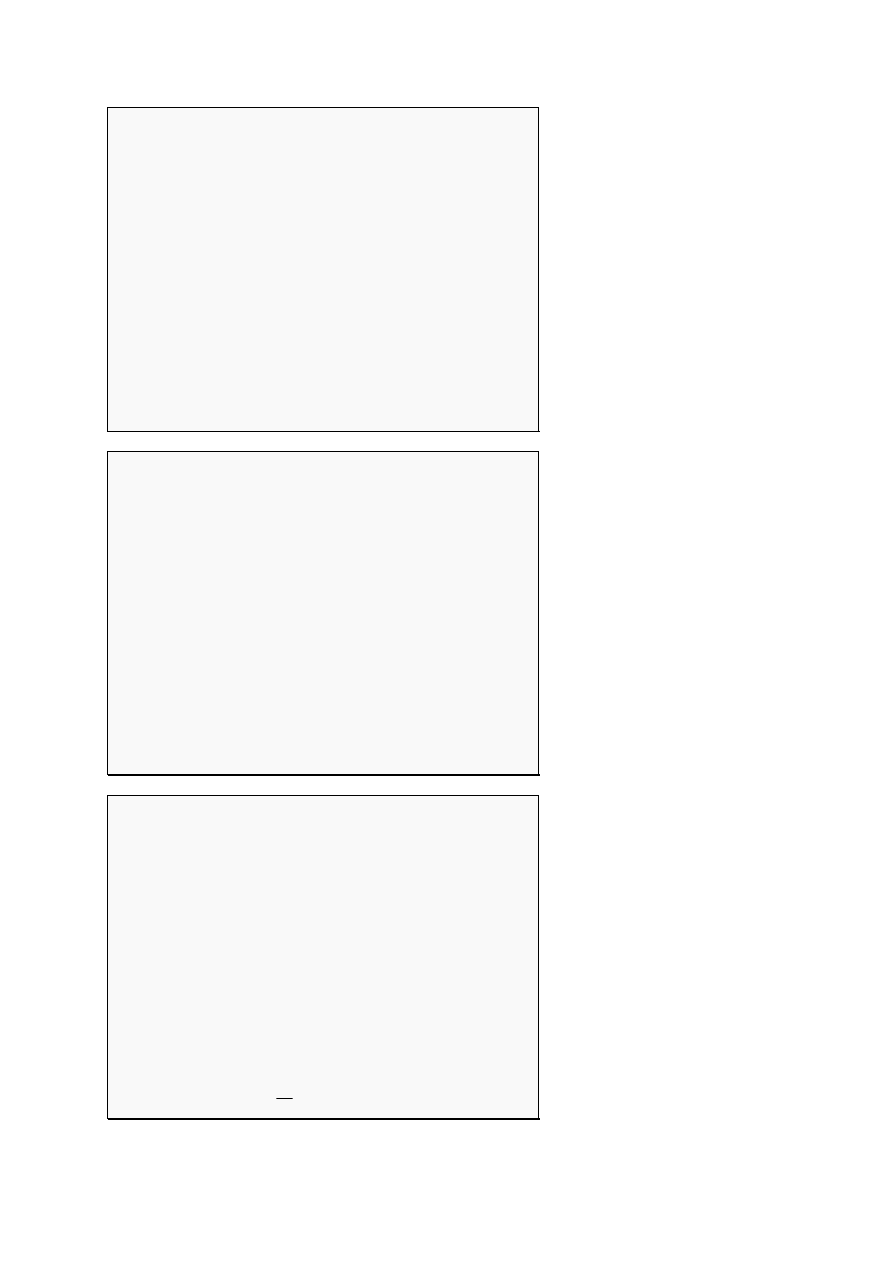
Przykład:
Zderzenie niesprężyste (idealne)
1
1
V
m
2
2
V
m
1
2
1
u
m
m
+
Zasada zachowania pędu
Zasada zachowania energii
(
)
1
2
1
2
2
1
1
u
m
m
V
m
V
m
⋅
+
=
+
(
)
E
u
m
m
V
m
V
m
Δ
+
⋅
+
=
+
2
2
2
2
1
2
1
2
2
2
2
1
1
E
Δ
2
1
2
2
1
1
1
m
m
v
m
v
m
u
+
+
=
strata energii
Momentu pędu
moment pędu (kręt) cząstki o pędzie p i znajdującej się w
punkcie określonym wektorem wodzącym r wynosi:
wektor momentu pędu jest prostopadły do płaszczyzny
wyznaczonej przez p i r przedstawiamy go w postaci:
p
r
v
m
r
=
L
r
r
r
r
r
×
=
×
(
)
(
)
(
)
x
y
z
x
y
z
z
y
x
yp
xp
k
xp
zp
j
zp
yp
i
p
p
p
z
y
x
k
j
i
L
−
+
−
+
−
=
=
=
r
r
r
r
r
r
r
p
sin
mv
r
=
L
⊥
= r
φ
φ
L
r
rr
p
r
x
z
y
⊥
r
r
Zachowanie momentu pędu
moment siły
zmiana momentu pędu w czasie
jeżeli wypadkowy moment sił zewnętrznych
działających na układ jest równy zeru, to
całkowity moment pędu tego układu jest stały
0
F
r
T
=
×
=
r
r
r
∑
const
=
L
r
F
r
T
r
r
r
×
=
(
)
T
=
F
r
=
F
r
dt
p
r
d
=
dt
L
d
r
r
r
r
r
3
2
1
r
r
r
r
r
×
×
+
×
=
×
=0
p
v
T=0 gdy: r=0, lub F=0, lub F || r
Obracający się dysk
rozważmy ciało obracające się z prędkością
ω
wokół osi przechodzącej przez środek masy ciała
m
j
Δ
L
j
v
( )
(
)
ω
ω
∑ Δ
=
Δ
∑
=
Δ
∑
j
2
j
j
j
j
j
j
j
m
r
r
m
r
v
m
r
=
L
ω
I
=
L
mj
r
=
I
2
j
Δ
∑
∫
dm
2
r
=
I
gdzie
nazywamy momentem bezwładności
ε
ω
r
r
r
r
I
dt
d
I
=
dt
L
d
=
=
T
2
I
2
1
ω
=
K
konc
pocz
ω
ω
konc
pocz
I
I
=
Dzielimy ciało na małe elementy o masie Δm
j
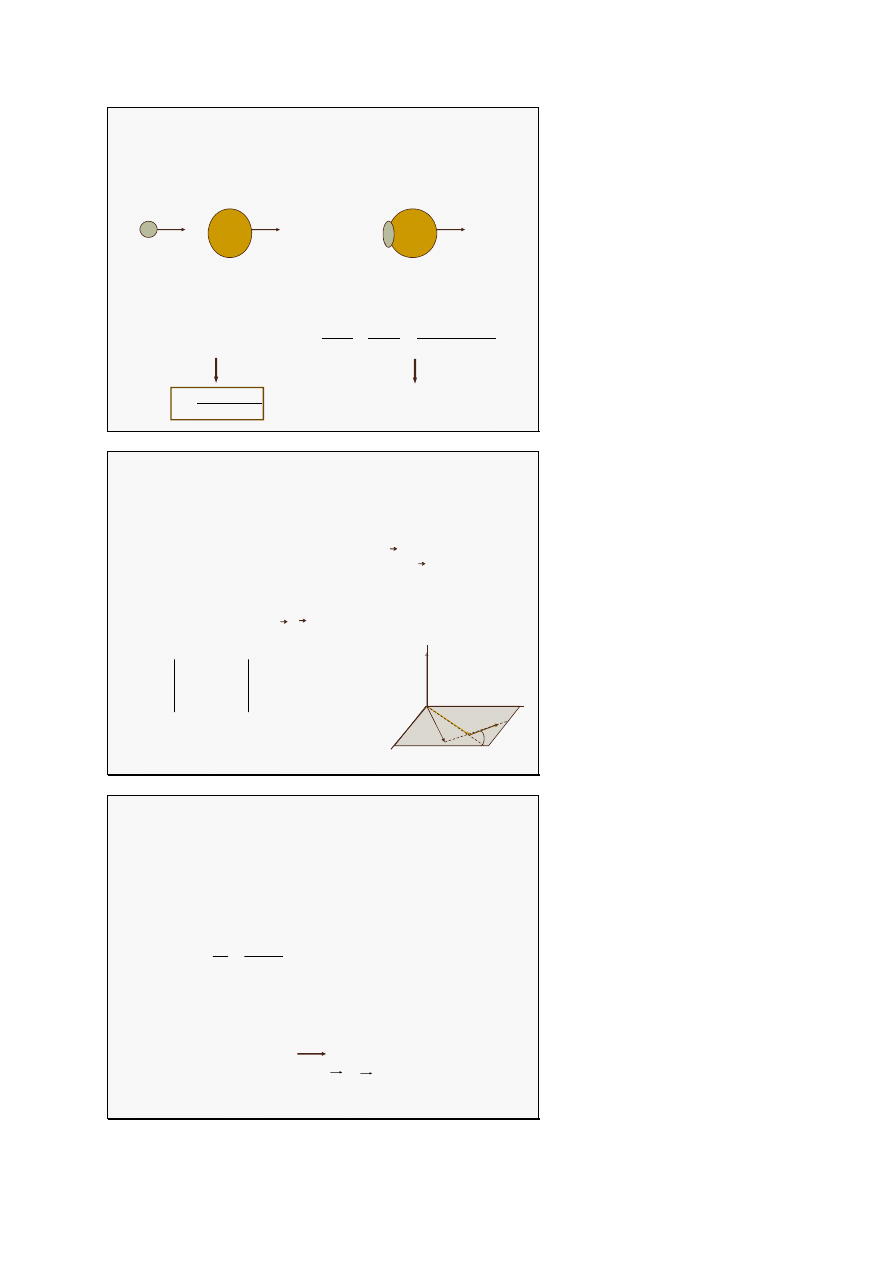
Precesja pod wpływem siły
ciężkości
F
r
T
r
r
r
×
=
dt
L
d
T
r
r =
t
T
L
Δ
=
Δ
r
r
gr
r
r
m
r
T
×
=
L
L
L
r
r
r
Δ
+
=
'
Lr
Tr
Lr
Δ
moment siły, tak więc i zmiana
momentu pędu jest skierowana
w naszą stronę w płaszczyźnie
poziomej powodując precesję
g
m
R
r
r
−
=
Na obracające się koło o
momencie pędu L działa moment
siły T powodujący zmianę ΔL
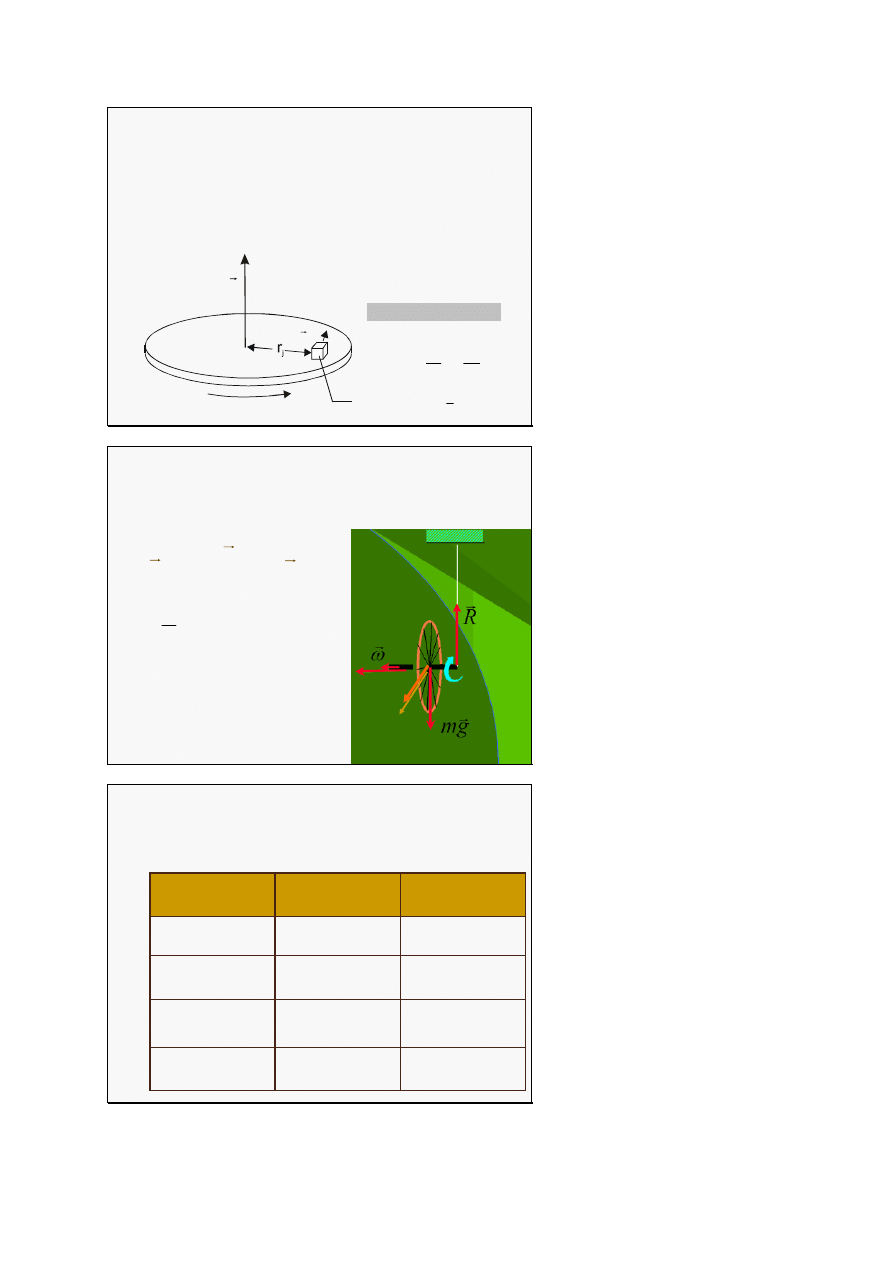
Analogia ruchu
postępowego i obrotowego
Ruch
postępowy
Ruch
obrotowy
Wielkości
m, v, a
I, ω, ε
Energia
kinetyczna
mv
2
/2
Iω
2
/2
II Zasada
dynamiki
F=ma
F=dp/dt
T=Iε
T=dL/dt
pęd, moment
pędu
p=mv
L=Iω
Wyszukiwarka
Podobne podstrony:
2010 01 Mechanik Pojazdow Samochodowych Teoretyczny
01 Mechanika
Płaski układ sił, fizyka edu liceum, 01 Mechanika[M], M2.D Dynamika, Warunki rownowagi sil. Maszyny
AGH e-Fizyka 01 Mechanika 1, Fizyka i Fizyka chemiczna
2010 01 Mechanizm haseł jednorazowych [Bezpieczenstwo]
Kraków dnia 01, mechanika plynów
2010 01 Mechanik Pojazdow Samochodowych Teoretyczny
01 mechanika podstawowa
mechanik maszyn i urzadzen drogowych 833[01] z1 01 n
optyk mechanik 731[04] z1 01 u
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z2 04 n
mechanik pojazdow samochodowych 723[04] z2 01 n
optyk mechanik 731[04] z1 01 n
optyk mechanik 731[04] z4 01 n
mechanik precyzyjny 731[03] z1 01 n
mechanik automatyki przemyslowej i urzadzen precyzyjnych 731[01] z1 02 n
01-diagnostyka samochodowa, Instrukcje BHP, XV - MECHANIKA I LAKIERN. SAMOCH
więcej podobnych podstron