Elementy animacji – sterowanie manipulatorem
1
Cel zadania
Wykształcenie umiej˛etno´sci korzystania z szablonów std::vector<> i std::list<>.
2
Opis zadania
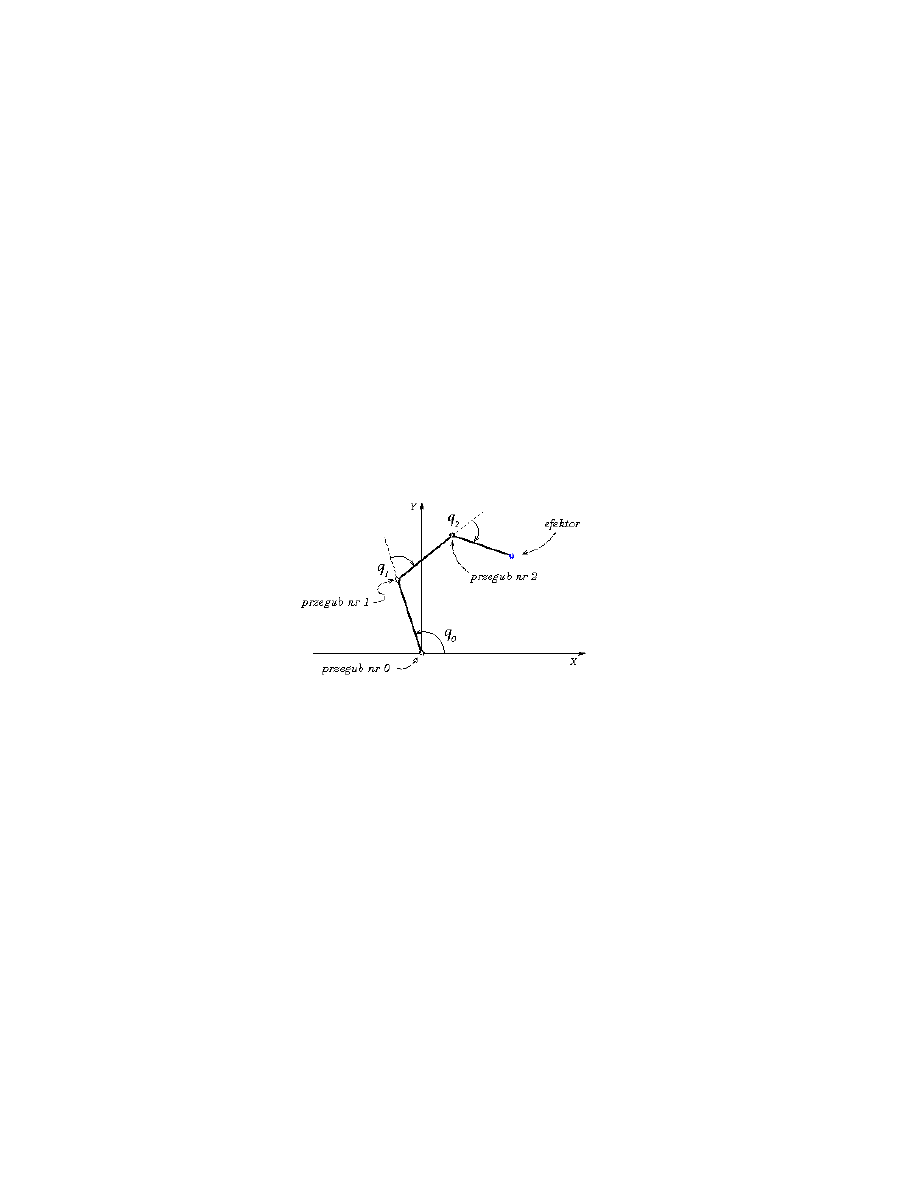
Nale˙zy napisa´c program, który umo˙zliwi wyznaczenie konfiguracji (postury) manipulatora. Za-
kładamy, ˙ze manipulator przedstawiony jest schematycznie w postaci łamanej (patrz rysunek
poni˙zej). Ka˙zdy z segmentów łamanej ma symbolizowa´c pojedynczy segment ramienia mani-
pulatora. Tak wi˛ec w ten sposób przedstawione zadanie sprowadza si˛e do wyznaczenia poło˙ze-
nia poszczególnych przegubów manipulatora i jego efektora. Postura manipulatora jest zadana
poprzez warto´sci k ˛
atów q
0
, q
1
, q
2
, . . . mi˛edzy jego kolejnymi segmentami ramienia. Dla uprosz-
czenia, postury manipulatora b˛ed ˛
a rozwa˙zane tylko w jednej płaszczy´znie X OY . Zakłada si˛e,
Rysunek 1: Szkielet manipulatora i zaznaczonymi k ˛
atami pozwalaj ˛
acymi sterowanie nachyle-
niem poszczególnych segmentów manipulatora.
˙ze ilo´s´c segmentów ramienia nie jest ograniczona (w uproszczonej wersji zadania – słabiej oce-
nianej – mo˙zna przyj ˛
a´c, ˙ze liczba ta jest stała i wynosi 3). Ponadto przyjmuje si˛e, ˙ze długo´s´c
wszystkich segmentów jest jednakowa. Warto´s´c parametru okre´slaj ˛
acego długo´s´c mo˙ze by´c
zmieniana w trakcie działania programu. Wyznaczone współrz˛edne maj ˛
a by´c zapisane do pliku
o ustalonej nazwie manipulator.dat.
3
Format zapisu współrz˛ednych
Przyjmuje si˛e, ˙ze współrz˛edne kolejnych przegubów zapisywane s ˛
a w pliku tekstowym. Ka˙zda
para współrz˛ednych zapisana zostaje w osobnej linii. W pierwszej linii zapisane s ˛
a zawsze
współrz˛edne pocz ˛
atku układu współrz˛ednych. Przykładowa posta´c pliku ze współrz˛ednymi
przedstawiona jest poni˙zej.
0
0
-2.4
10.23
7.3
20.14
15.1
16.23
18.21
23.19
1

4
Wizualizacja
Chc ˛
ac zobaczy´c, postur˛e manipulatora w ´srodowisku systemu Unix/Linux mo˙zna skorzysta´c z
programu gnuplot (znajduje si˛e on w ka˙zdej dystrybucji Linuksa). Program ten jest dost˛epny
równie˙z dla systemu MS Windows. Adres strony umo˙zliwiaj ˛
acej pobranie programu to:
http://sourceforge.net/project/showfiles.php?group_id=2055
4.1
Wersja uproszczona
W tej wersji zadania mo˙zna ograniczy´c si˛e do r˛ecznego uruchamiania programu gnuplot po
ka˙zdorazowym przeliczeniu współrz˛ednych przegubów. Program gnuplot uruchamiamy w
osobnym okienku terminala graficznego po wcze´sniejszym przej´sciu do podkatalogu, w którym
znajduje si˛e plik manipulator.dat.
4.1.1
Uruchomienie rysowania z linii polecenia
Przykładowy sposób uruchomienia programu:
echo "plot ’manipulator.dat’; pause 999" | gnuplot
Przerwanie działania programu realizujemy poprzez naci´sni˛ecie przycisków Ctrl-C, gdy focus
znajduje si˛e w okienku, w którym on został uruchomiony.
4.1.2
Uruchomienie rysowania z w trybie interakcjnym
Z programem gnuplot mo˙zna pracowa´c w trybie interakcyjny. Uruchamiamy go poleceniem
gnuplot
, nast˛epnie wydajemy polecenie plot ’manipulator.dat’. Wyj´scie z programu po-
przez polecenie exit.
Uwaga: W przypadku pracy w trybie interakcyjnym nie ma sensu ko´nczy´c jego działanie po jed-
nokrotnym narysowaniu łamanej. Po ponownym przeliczeniu współrz˛ednych mo˙zna powtórzy´c
polecenie plot ’manipulator.dat’ (program gnuplot pami˛eta histori˛e polece´n, przej´scie
do poprzedniego polecenia dokonuje si˛e poprzez naci´sni˛ecie strzałki w gór˛e), które spowoduje
zaktualizowanie poprzedniego rysunku. Przykład sesji z programem gnuplot.
diablo@jkowalsk> gnuplot
G N U P L O T
Version 4.0 patchlevel 0
last modified Thu Apr 15 14:44:22 CEST 2004
System: SunOS 5.10
...
gnuplot>
plot ’manipulator.dat’
gnuplot>
plot ’manipulator.dat’
...
gnuplot>
plot ’manipulator.dat’
gnuplot>
exit
diablo@jkowalsk> _
2

4.2
Wersja podstawowa
W tej wersji proponuje si˛e u˙zycie zewn˛etrznego modułu lacze_do_gnuplota. Znajduje si˛e
on kartotece ˜bk/edu/po/zad/z-manipulator1/przyklad_2D wraz z przykładem jego wy-
korzystania. Wspomniany moduł pozwala uruchomi´c program gnuplot z poziomu własnego
programu i przesła´c do niego polecenie wykonania rysunku. Ponadto umo˙zliwia na ustalenie
zakresu osi współrz˛ednych OX i OY .
5
Przykład działania programu
Niniejszy przykład nie obejmuje widoku okienka z rysunkiem wygenerowanym przez program
gnuplot
.
jkowalsk@panamint: rozwiazanie> ./manipulator
Aktualne wspolrzedne i parametry:
q0 =
105
Przegub_0: (0, 0)
q1 =
-70
Przegub_1: (-2.59, 9.66)
q2 =
-60
Przegub_2: (5.6, 15.4)
Efektor: (14.7, 11.2)
l = 10
Menu:
0 - Zmiana kata q0
1 - Zmiana kata q1
2 - Zmiana kata q2
z - zmiana ilosc segmentow
l - zmiana dlugosci segmentu
? - ponowne wyswietlenie menu
k - koniec programu
Twoj wybor?> 0
Wprowadz q0: 82
Aktualne wspolrzedne i parametry:
q0 =
82
Przegub_0: (0, 0)
q1 =
-70
Przegub_1: (1.39, 9.9)
q2 =
-60
Przegub_2: (11.2, 12)
Efektor: (17.9, 4.55)
l = 10
Menu:
0 - Zmiana kata q0
1 - Zmiana kata q1
2 - Zmiana kata q2
z - zmiana ilosc segmentow
l - zmiana dlugosci segmentu
? - ponowne wyswietlenie menu
k - koniec programu
3
Twoj wybor?> k
jkowalsk@panamint: rozwiazanie> _
6
Rozszerzenie (nieobowi ˛
azkowe)
W wersji rozszerzonej proponuje si˛e dodatkowe elementy:
• Animacj˛e zmiany pozycji danego segmentu. Chodzi o zapewnienie płynnej zmiany po-
zycji segmentu (tak jak to jest zrealizowane w dostarczonym przykładzie).
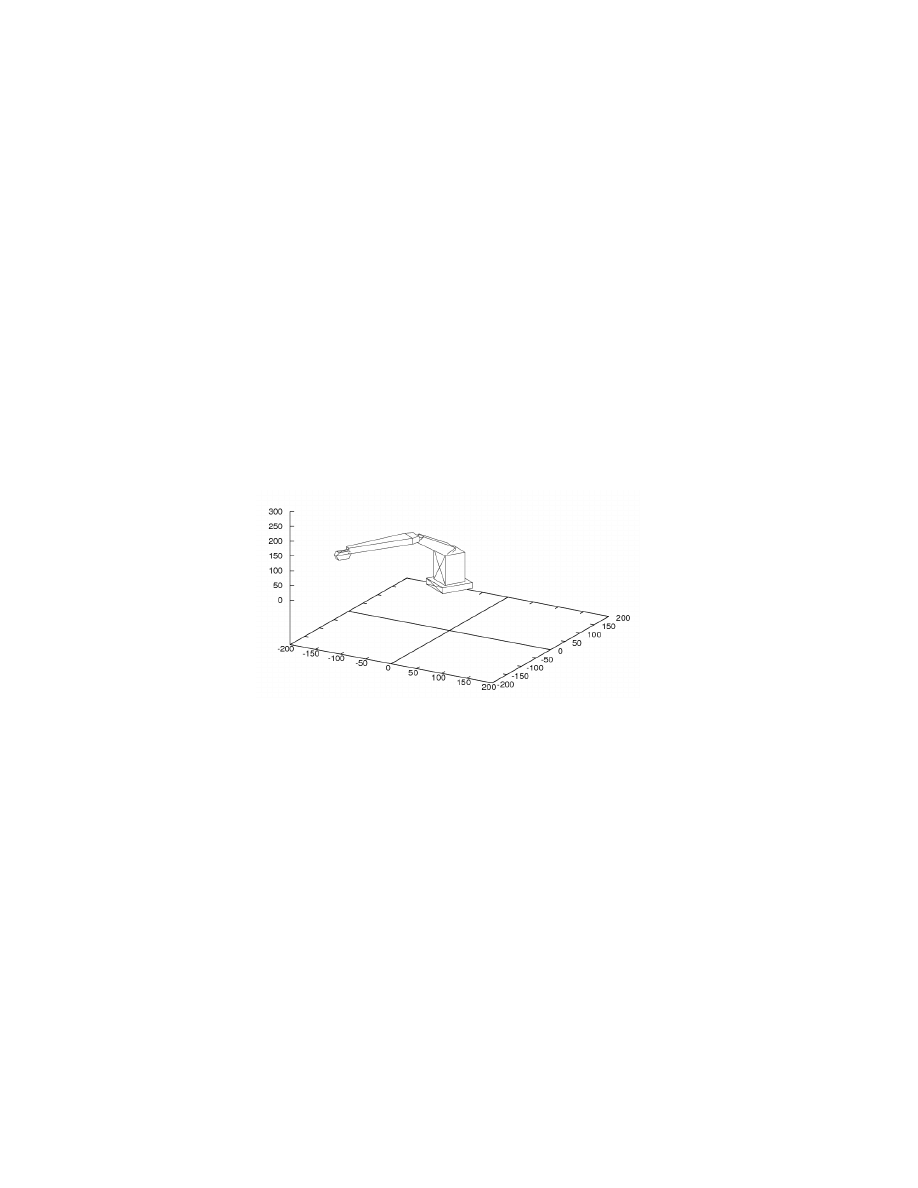
• Skonstruowanie trójwymiarowego rysunku manipulatora. Mo˙zna tego dokona´c wykorzy-
stuj ˛
ac moduł lacze_do_gnuplota. Przykład jego u˙zycia dla wersji 3D jest umieszczony
w kartotece
˜bk/edu/po/zad/z-manipulator1/przyklad_3D
Wspomniany moduł pozwala uruchomi´c program gnuplot z poziomu programu i prze-
sła´c do niego polecenie wykonania rysunku. W tej wersji programu zakłada si˛e, ˙ze kon-
strukcja manipulatora jest w programie zaszyta na sztywno (bez mo˙zliwo´sci zmiany ilo´sci
segmentów i ich długo´sci). Przykład wizualizacji manipulatora znajduje si˛e na zamiesz-
Rysunek 2: Przykład wizualizacji manipulatora zrealizowany w ramach studenckich zaj˛e´c la-
boratoryjnych
czonym rysunku.
7
Obliczanie współrz˛ednych przegubów
Wyznaczanie współrz˛ednych przegubów i efektora najłatwiej jest zrealizowa´c ł ˛
acz ˛
ac z ka˙zdym
z przegubów i efektorem lokalny układ współrz˛ednych. Przeguby znajduj ˛
a si˛e w pocz ˛
atku ta-
kich układów współrz˛ednych. Dzi˛eki temu i-ty przegub (oznaczony jako punkt P
i
) w swoim
lokalnym układzie współrz˛ednych X
i
OY
i
ma współrz˛edne P
i
i
= (0, 0). Zastosowane oznacze-
nie P
i
i
odzwierciedla fakt, ˙ze s ˛
a to współrz˛edne punktu P
i
w układzie współrz˛ednych i-tego
przegubu. To samo dotyczy efektora.
Naszym zadaniem jest wyliczenie współrz˛ednych poszczególnych punktów w układzie glo-
balnym X
O
OY
O
. W przedstawionym przykładzie mo˙zna to zrealizowa´c dokonuj ˛
ac nast˛epuj ˛
a-
4
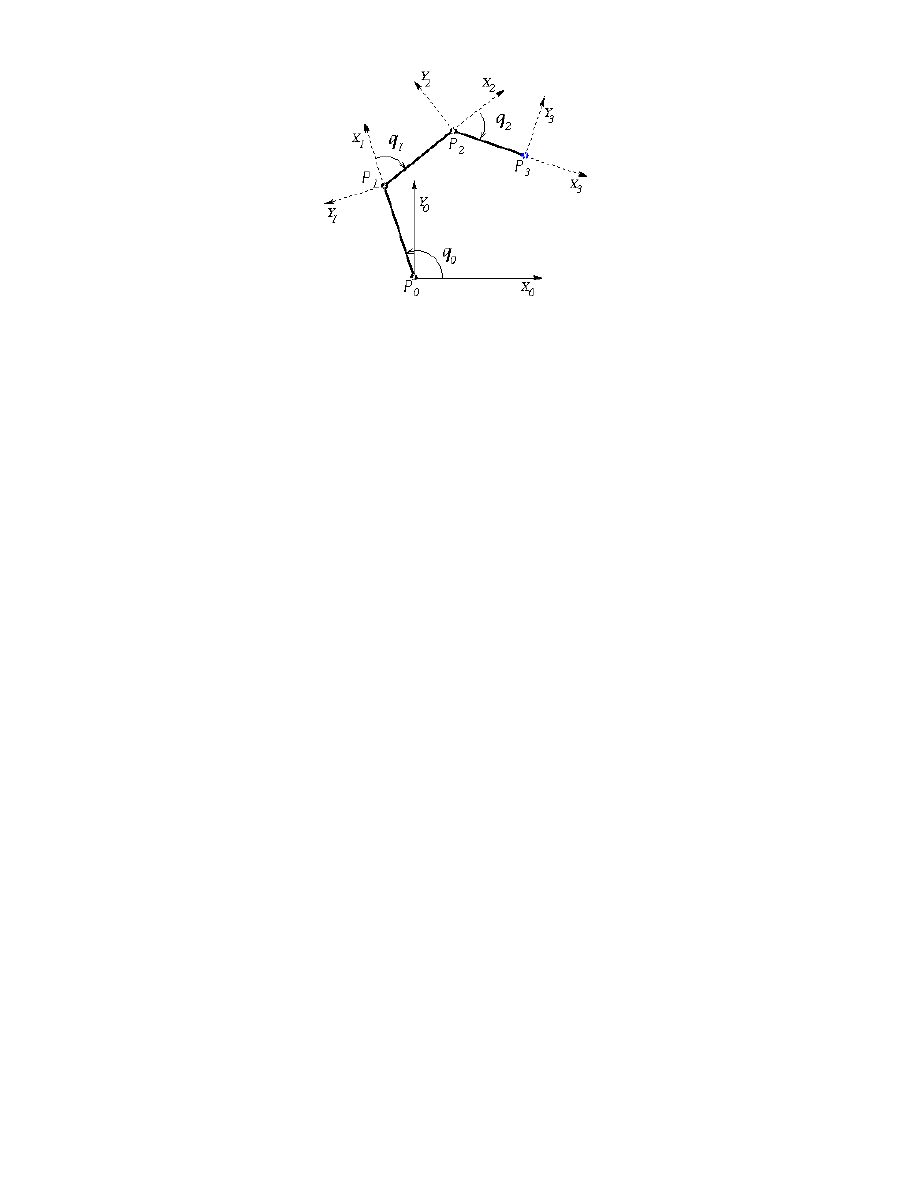
Rysunek 3: Lokalne układy współrz˛ednych zwi ˛
azane z ka˙zdym z przegubów.
cych transformacji:
P
0
0
= [0 0]
T
,
P
1
0
= R(q
0
) · (P
1
1
+ T ),
P
2
0
= R(q
0
) ·
³
R
(q
1
) · (P
2
2
+ T ) + T
´
,
P
3
0
= R(q
0
) ·
³
R
(q
1
) ·
³
R
(q
2
) · (P
3
3
+ T ) + T
´
+ T
´
.
(1)
Współrz˛edne punktu we wzorze przedstawionym powy˙zej reprezentowane s ˛
a jako macierz jed-
nokolumnowa. Natomiast T to wektor translacji reprezentowany przez macierz jednokolum-
now ˛
a [l 0]
T
, gdzie l jest długo´sci ˛
a segmentu. R(q
i
) jest macierz ˛
a rotacji w współczynnikach
postaci:
R
(q
i
) =
· cos q
i
− sin q
i
sin q
i
cos q
i
¸
(2)
Nale˙zy zauwa˙zy´c, ˙ze wyliczanie współrz˛ednych przegubu np. P
2
jest ci ˛
agiem transformacji
do układów współrz˛ednych kolejnych przegubów reprezentowanych przez punkty P
1
i P
0
. Po-
dobnie dla P
3
jest to ci ˛
ag transformacji do układów współrz˛ednych zwi ˛
azanych z przegubami
reprezentowanych przez punkty P
2
, P
1
oraz P
0
. Tak wi˛ec wyliczenie współrz˛ednych przegubu
P
3
mo˙zna byłoby rozpisa´c nast˛epuj ˛
aco:
P
3
2
= R(q
2
) · (P
3
3
+ T ),
P
3
1
= R(q
1
) · (P
3
2
+ T ),
P
3
0
= R(q
0
) · (P
3
1
+ T ).
(3)
To spostrze˙zenie nale˙zy wykorzysta´c przy implementacji rozwi ˛
azania zadania.
8
Materiały pomocnicze
Dodatkowe pomocnicze elementy ułatwiaj ˛
ace rozpocz˛ecie realizacj˛e zadania znale´z´c mo˙zna na
serwerze diablo lub panamint w katalogu ˜bk/edu/po/zad/z-manipulator1. W katalogu
tym znajduj ˛
a si˛e nast˛epuj ˛
ace podkatalogi i pliki:
˜bk/edu/po/zad/z-manipulator1/.
bin.diablo/manipulator
bin.panamint/manipulator
przyklad_2D/Makefile
5

przyklad_2D/src/start.cpp
przyklad_2D/src/lacze_do_gnuplota.cpp
przyklad_2D/inc/lacze_do_gnuplota.hh
przyklad_3D/Makefile
przyklad_3D/src/start.cpp
przyklad_3D/src/lacze_do_gnuplota.cpp
przyklad_3D/inc/lacze_do_gnuplota.hh
przyklad_3D/inc/prostopadloscian1.dat
przyklad_3D/inc/prostopadloscian2.dat
przyklad_3D/inc/prostopadloscian3.dat
bin.diablo/manipulator, bin.panamint/manipulator
S ˛
a to programy binarne. Stanowi ˛
a one
przykład realizacji programu, w wersji podstawowej (z dodatkiem animacji), który został skom-
pilowany odpowiednio na serwerze diablo i na serwerze panamint.
przyklad_2D
Katalog zawiera przykład u˙zycia modułu lacze_do_gnuplota pozwalaj ˛
acego
uruchomi´c program gnuplot z poziomu własnego programu i nawi ˛
aza´c z nim komunikacj˛e. W
przykładzie pokazane jest rysowanie z wykorzystaniem grafiki 2D.
przyklad_3D
Katalog zawiera przykład u˙zycia modułu lacze_do_gnuplota pozwalaj ˛
acego
uruchomi´c program gnuplot z poziomu własnego programu i nawi ˛
aza´c z nim komunikacj˛e. W
przykładzie pokazane jest rysowanie z wykorzystaniem grafiki 3D.
6
Wyszukiwarka
Podobne podstrony:
Elementy animacji – sterowanie manipulatorem
Sterowanie manipulatorem w obecno´ sci przeszkód
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Elementy systemów sterowania maszyn zwiazane z bezpieczenstwem
sprawko robotyka, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt3, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt góra, R
projekt1hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt g
projekt 1 hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Charakterystyka dynamiczna wybranego elementu ukladu sterowania, Inż + seminarium
1c algorytmy sterowania manipulatorów
Elementy informacyjne i sterownicze
Dobór parametrów oraz elementów układu sterowania pieca
praca dyplomowa sterowanie ruchem manipulatora 34B5NKP667NNVLV4KF3B37RICEOPWVJMZUAHENI
więcej podobnych podstron