w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
p r e z e n t a c j a
Wśród rozwiązań napędów dostępnych na rynku dominują systemy zamknięte, o zde-
finiowanej funkcjonalności, na którą użytkownik nie ma wpływu. Realizowane w nich
wszelkie niestandardowe rozwiązania aplikacyjne muszą być wykonane z wykorzysta-
niem sterowania nadrzędnego PLC.
38
p r e z e n t a c j a
serwonapędy B&R ACOPOS
ekstremalnie szybkie, nadzwyczajnie precyzyjne, niezwykle elastyczne
Piotr Huryń – B&R Automatyka Przemysłowa Sp. z o.o.
F
irma
B
&R postanowiła zmienić
tradycyjne podejście do techniki
napędowej, otwierając częściowo sys-
tem operacyjny swoich napędów oraz
udostępniając wyspecjalizowane blo-
ki funkcyjne implementowane przez
użytkownika. W ten sposób użytkow-
nik ma możliwość optymalnego wy-
korzystania wydajnego procesora DSP
(
Digital Signal Processor
) SHARC, wy-
korzystywanego w napędach B
&R, co
gwarantuje realizację złożonych algo-
rytmów bezpośrednio w napędzie
z cyklem 400 µs i przez to odciążenie
oraz jednoczesne uproszczenie nad-
rzędnego systemu sterowania.
bloki funkcyjne ACOPOS
System operacyjny serwonapędów
B
&R ACOPOS składa się z jednostek
funkcyjnych o zdefiniowanych struk-
turach. Przykładami nich są: regulator
prądu, prędkości, pozycji czy też gene-
rator wartości zadanej. W tym przy-
padku użytkownik nie ma możliwo-
ści zmiany struktury jednostek, może
natomiast definiować niektóre ich wej-
ścia i wyjścia. Oprócz tego może two-
rzyć swoje własne algorytmy o zdefi-
niowanych przez siebie strukturach,
wykorzystując opracowane przez B
&R
specjalizowane bloki funkcyjne.
Użytkownik ma do dyspozycji 18
rodzajów bloków funkcyjnych, przy
czym jednocześnie może być użytych
do 8 bloków danego rodzaju. Czas cy-
klu wywoływania bloków funkcyj-
nych jest synchroniczny do cyklu re-
gulatora pozycji (400 µs). Czas wyko-
nania wszystkich bloków funkcyj-
nych jest monitorowany, a przekro-
czenie jego dopuszczalnej wartości
jest sygnalizowane za pomocą odpo-
wiedniego komunikatu.
przykładowe
zastosowania bloków
funkcyjnych ACOPOS
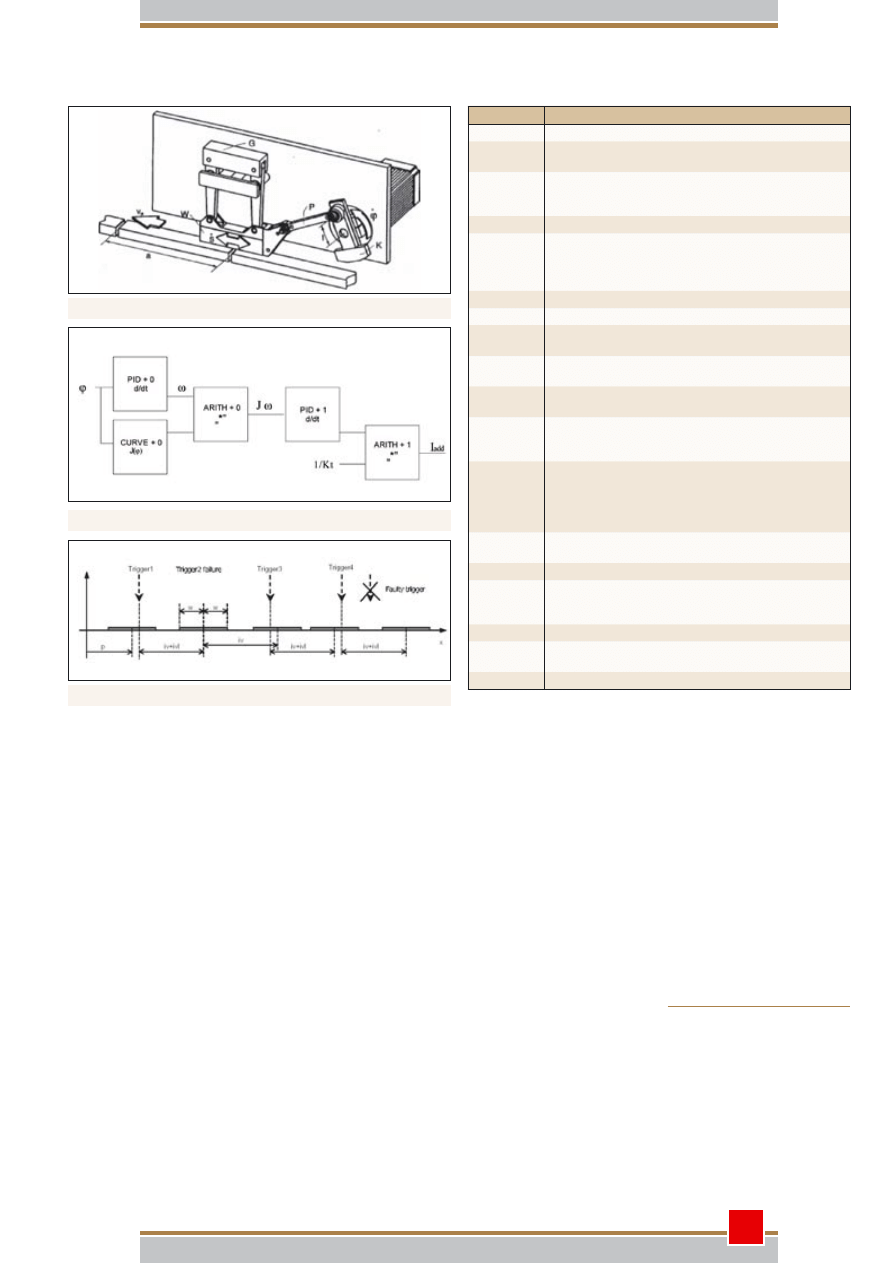
Przełączanie enkoderów „w locie”:
Napęd B
&R ACOPOS posiada dwa
tryby pracy:
praca z jednym enkoderem – za-
montowanym na silniku. Pętle re-
gulacji: prądowej, prędkościowej
i położeniowej korzystają wtedy
z wewnętrznego enkodera silnika,
praca z dwoma enkoderami. Pę-
tla regulacji prądowej i prędko-
ściowej korzysta z wewnętrzne-
go enkodera silnika, natomiast
pętla regulacji położeniowej z ze-
wnętrznego enkodera, zamonto-
wanego bezpośrednio na obciąże-
niu. Umożliwia to uniknięcie błę-
dów położenia wynikających z lu-
zów przekładni, poślizgu itp.
Przykładem aplikacji może być
zadanie cięcia desek pod wymiar.
W tym przypadku w ruchu deski wy-
stępuje faza transportu, w której po-
tencjalny poślizg nie ma wpływu na
parametry procesu, oraz faza cięcia,
w której kluczowe znaczenie ma wy-
eliminowanie poślizgu. W pierwszej
fazie serwonapęd uwzględnia wyłącz-
nie enkoder wewnętrzny silnika.
W fazie drugiej deska zostaje do-
ciśnięta rolką dociskową z zamonto-
wanym zewnętrznym enkoderem.
W momencie, gdy deska jest prawidło-
wo dociskana, następuje przełączenie
serwonapędu w czasie 400 µs na tryb
pracy dwuenkoderowy, co eliminuje
powstawanie błędów pozycji na sku-
tek poślizgu rolki napędzającej.
Wykorzystane bloki funkcyjne to:
EVWR-0 – przełącza na pracę 2-en-
koderową po pojawieniu się zbo-
cza narastającego czujnika deski,
EVWR-1 – przełącza na pracę 1-en-
koderową po pojawieniu się zbo-
cza opadającego czujnika deski.
Innym przykładem zastosowania
pracy dwuenkoderowej może być ma-
szyna CNC do cięcia plazmą, w której
bardzo istotna jest odległość palni-
ka od ciętego materiału. Jako sygnał
zwrotny wysokości palnika nad ma-
teriałem można wykorzystać wartość
analogową czujnika pojemnościowe-
go odległości. Wartość ta może być
podana na blok funkcyjny CURVE,
który realizuje funkcję wysokość =
funkcja (wartość analogowa czujnika
położenia). Wyjście z tego bloku jest
kierowane do regulatora pozycji tak
jak w poprzednim przykładzie.
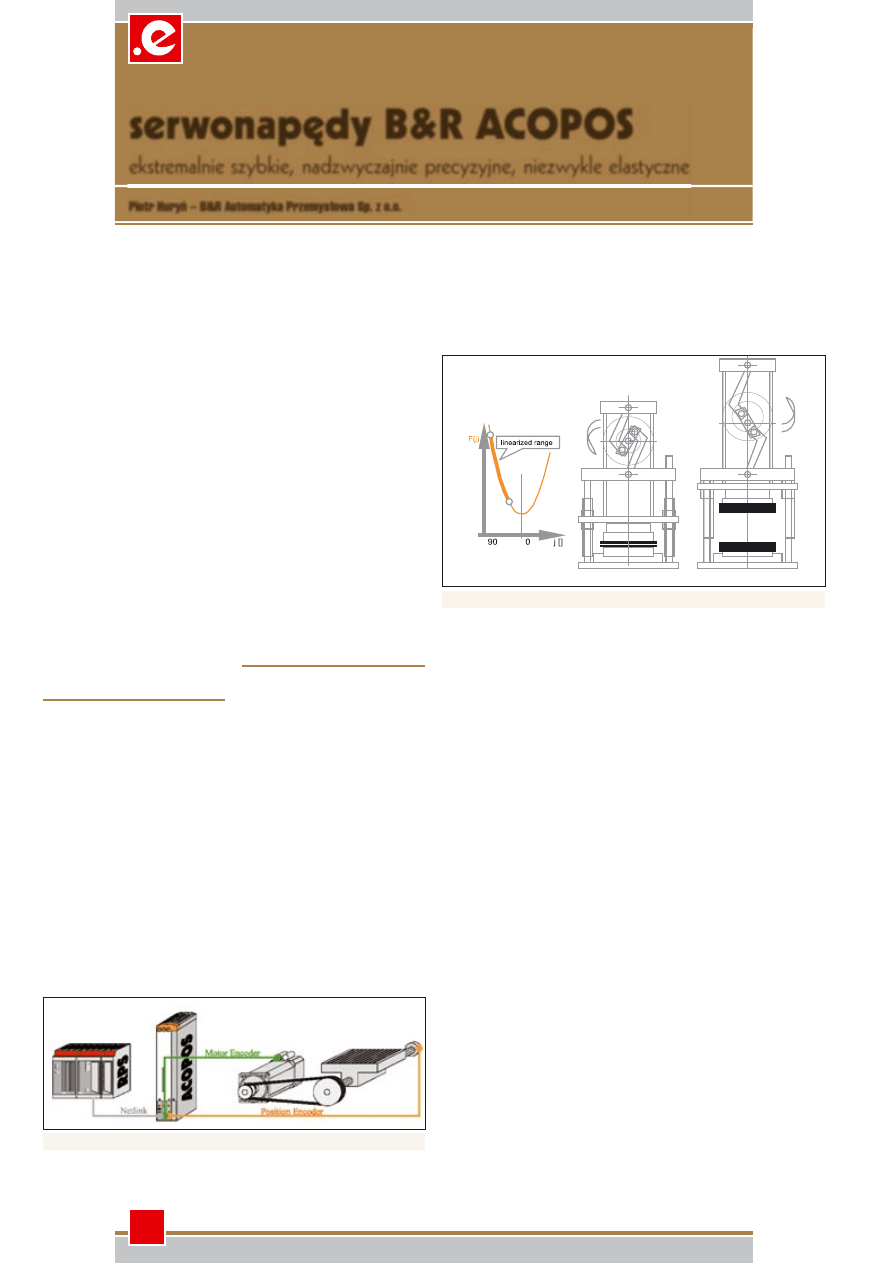
Implementacja mechanizmu kola-
nowego:
W aplikacjach wymagających du-
żej siły docisku, na przykład we wtry-
skarkach, maszynach do termoformo-
wania, rozdmuchiwarkach PET, sto-
suje się serwonapędy w połączeniu
z mechanizmem kolanowym. Zaletą
tego rozwiązania jest duża siła docisku
przy zastosowaniu małego momentu
silnika, wadą natomiast nieliniowa za-
leżność pomiędzy kątem obrotu silni-
ka a położeniem obciążenia.
Rys. 1 Linearyzacja mechanizmu kolanowego
Rys. 2 Praca napędu B&R ACOPOS
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 5
39
Zaimplementowanie matema-
tycznego opisu mechanizmu ko-
lanowego w serwonapędzie B
&R
umożliwia bezpośrednie odwoły-
wanie się do pozycji obciążenia,
a także definiowanie jego profi-
lu prędkości. Zależność pomiędzy
pozycją obciążenia a kątem ϕ na-
pędu można zapisać w postaci funk-
cji, która jest ładowana do napędu
w postaci wielomianów maksymal-
nie 6. rzędu. Napęd synchronizowa-
ny jest do wirtualnej osi, według
załadowanej funkcji ϕ(x). Parame-
try ruchu wirtualnej osi odpowia-
dają wymaganym parametrom ru-
chu obciążenia.
Kompensacja zmiennej inercji ob-
ciążenia w regulatorze prądu:
Dla powyższego przykładu można
wyznaczyć zależność pomiędzy in-
ercją obciążenia a aktualnym kątem
napędu ϕ. Ponieważ w zakresie ru-
chu występują znaczne zmiany war-
tości inercji, mogą się pojawić trudno-
ści z poprawnym dostrojeniem napę-
du. Wyjściem z sytuacji jest zmiana
struktury regulatora prądu poprzez
wprowadzenie elementu addytyw-
nego do zadanego prądu, który bę-
dzie kompensował zmieniające się
obciążenie w zależności od aktual-
nego kąta ϕ.
Funkcję J(ϕ) należy załadować
do napędu i wykorzystać ją w bloku
funkcyjnym CURVE, który na swo-
im wyjściu będzie zwracał aktual-
ną wartość inercji. Operację mnoże-
nia przeprowadzamy za pomocą blo-
ku ARITH, natomiast różniczkowanie
za pomocą bloku PID, z wyłączoną ak-
cją proporcjonalną i całkującą.
Korekcja znacznika folii:
W maszynach pakujących czy dru-
karskich jest to podstawowe zadanie
należące do serwonapędu realizują-
cego posuw folii lub papieru. Sygnał
czujnika znacznika jest podany na
szybkie wejście Trigger (50 µs) w ser-
wonapędzie. Do zapisania wartości
aktualnej pozycji w momencie przyj-
ścia sygnału z czujnika służy blok
funkcyjny LATCH. Można w nim
zdefiniować:
parametr, który ma być zatrzaski-
wany: pozycję enodera silnika lub
enkodera zewnętrznego, pozycje
z innych napędów, wyjścia z in-
nych bloków funkcyjnych itp.,
zdarzenie powodujące zatrzaśnię-
cie pozycji – może to być sygnał
z wejścia cyfrowego, pozycja prze-
słana przez sieć, wyjście z innego
bloku funkcyjnego,
minimalną i maksymalną szero-
kość impulsu; sygnały spoza za-
kresu są ignorowane,
kompensację czasu opóźnienia
czujnika,
okno, czyli zakres pozycji, w któ-
rych jest spodziewany sygnał
z czujnika; ma to zastosowanie
w foliach z kolorowym nadru-
kiem, mogących wprowadzać fał-
szywe sygnały,
zdefiniowane okno jest powie-
lane co zadany interwał, przy
czym istnieje możliwość korek-
cji pozycji okna od miejsca wy-
stąpienia ostatniego sygnału
z ograniczeniem maksymalnej
korekcji.
podsumowanie
Bloki funkcyjne ACOPOS gwaran-
tują dużą elastyczność przy progra-
mowaniu nawet najbardziej skompli-
kowanych zagadnień techniki napę-
dowej, co skutkuje szybkim tworze-
niem efektywnych rozwiązań apli-
kacyjnych.
Rys. 3 Linearyzacja pozycji i kompensacja zmiennej inercji
Rys. 4 Realizacja kompensacji zmiennej inercji obciążenia
Rys. 5 Wykorzystanie funkcji LATCH do korekcji znacznika druku
Nazwa funkcji
Opis
AIO
Obsługa kart analogowych.
ARITH
Operacje arytmetyczne: dodawanie, dodawanie
z czynnikiem wagi, odejmowanie, mnożenie, dzielenie.
CAMCON
Programator krzywkowy: załączanie wyjść w zależności
od pozycji osi Master. Kompensacja czasu załączenia i wyłączenia,
definiowana histereza.
CMP
Komparator, z możliwością definiowania poziomu, okna oraz histerezy.
CURVE
Krzywa – realizuje algorytm y=f(x), gdzie f jest zapisana w postaci
maks. 64 sklejonych wielomianów 6. rzędu. Możliwość skalowania
(przemnażania). Opcja działania cyklicznego, niecyklicznego,
symetrycznego względem osi Y lub środka układu współrzędnych.
DELAY
Opóźnienie: opóźnia zmienne wejściowe o czas 0 – 0.04 s.
DIO
Obsługa kart cyfrowych ACOPOS: we / wy, liczniki.
EEPROM
Możliwość odczytu / zapisu danych umieszczonych
w pamięci flash ACOPOS, enkodera EnDat.
EVWR
Zmiana zadanego parametru po spełnieniu warunku:
osiągnięcia zadanego poziomu lub zbocza określonego parametru.
FIFO
Rejestr przesuwny FIFO z możliwością zarówno definiowania
zdarzenia zapisującego, jak i wypisującego.
IPL
Interpolator – interpoluje dane wejściowe funkcją liniową,
bądź kwadratową. Ustawiany czas otrzymywania zmiennych
wejściowych oraz czas interpolowania.
LATCH
Zatrzaskiwanie zmiennej po wystąpieniu zdefiniowanego zdarzenia.
Możliwość zdefiniowania okna, minimalnego i maksymalnego czasu
wystąpienia zdarzenia, przesuwania okna
w zależności od miejsca wystąpienia poprzedniego zdarzenia,
kompensacji czasu opóźnienia czujnika.
LOGIC
Operacje logiczne na 4 zmiennych wejściowych: AND, NOT, OR, NOR,
EXOR, EXNOR, (1 AND 2) OR (3 AND 4), (1 OR 2) AND (3 OR 4), itp.
MPGEN
Generator profilu ruchu. Zadawane: prędkość, przyspieszenie.
MUX
Multiplekser – w zależności od poziomu zmiennej na wyjście załączane
jest odpowiednie wejście. Załączenie może być: bezpośrednie,
bądź z kompensacją (w celu eliminacji skoków wartości wyjścia).
PID
Regulator PID, z funkcją ograniczenia akcji całkującej.
VAR
Parametry do wykorzystania przez użytkownika:
całkowite oraz rzeczywiste.
VARITH
Operacje matematyczne na dwóch wektorach 5-elementowych.
Tab. 1 Bloki funkcyjne dostępne w serwonapędach B&R ACOPOS
Wyszukiwarka
Podobne podstrony:
ei 2005 07 08 s085 id 154185 Nieznany
ei 2005 07 08 s033 id 154176 Nieznany
ei 2005 07 08 s060
ei 2005 07 08 s010
ei 2005 07 08 s083
ei 2005 07 08 s076
ei 2005 07 08 s050 id 154178 Nieznany
ei 2005 07 08 s079
ei 2005 07 08 s084 id 154184 Nieznany
ei 2005 07 08 s063
ei 2005 07 08 s040
ei 2005 07 08 s070
ei 2005 07 08 s052 id 154179 Nieznany
ei 2005 07 08 s006
ei 2005 07 08 s048
ei 2005 07 08 s029
ei 2005 07 08 s004
ei 2005 07 08 s020 id 154175 Nieznany
ei 2005 07 08 s030
więcej podobnych podstron