1.1
Chapter One
Euclidean Three-Space
1.1 Introduction.
Let us briefly review the way in which we established a correspondence between
the real numbers and the points on a line, and between ordered pairs of real numbers and
the points in a plane. First, the line. We choose a point on a line and call it the origin.
We choose one direction from the origin and call it the positive direction. The opposite
direction, not surprisingly, is called the negative direction. In a picture, we generally
indicate the positive direction with an arrow or a plus sign:
Now we associate with each real number r a point on the line. First choose some
unit of measurement on the line. For r
>
0, associate with r the point on the line that is a
distance r units from the origin in the positive direction. For r
<
0, associate with r the
point on the line that is a distance r units from the origin in the negative direction. The
number 0 is associated with the origin. A moments reflection should convince you that
this procedure establishes a so-called one-to-one correspondence between the real
numbers and the points on a line. In other words, a real number determines exactly one
point on a line, and, conversely, a point on the line determines exactly one real number.
This line is called a real line.
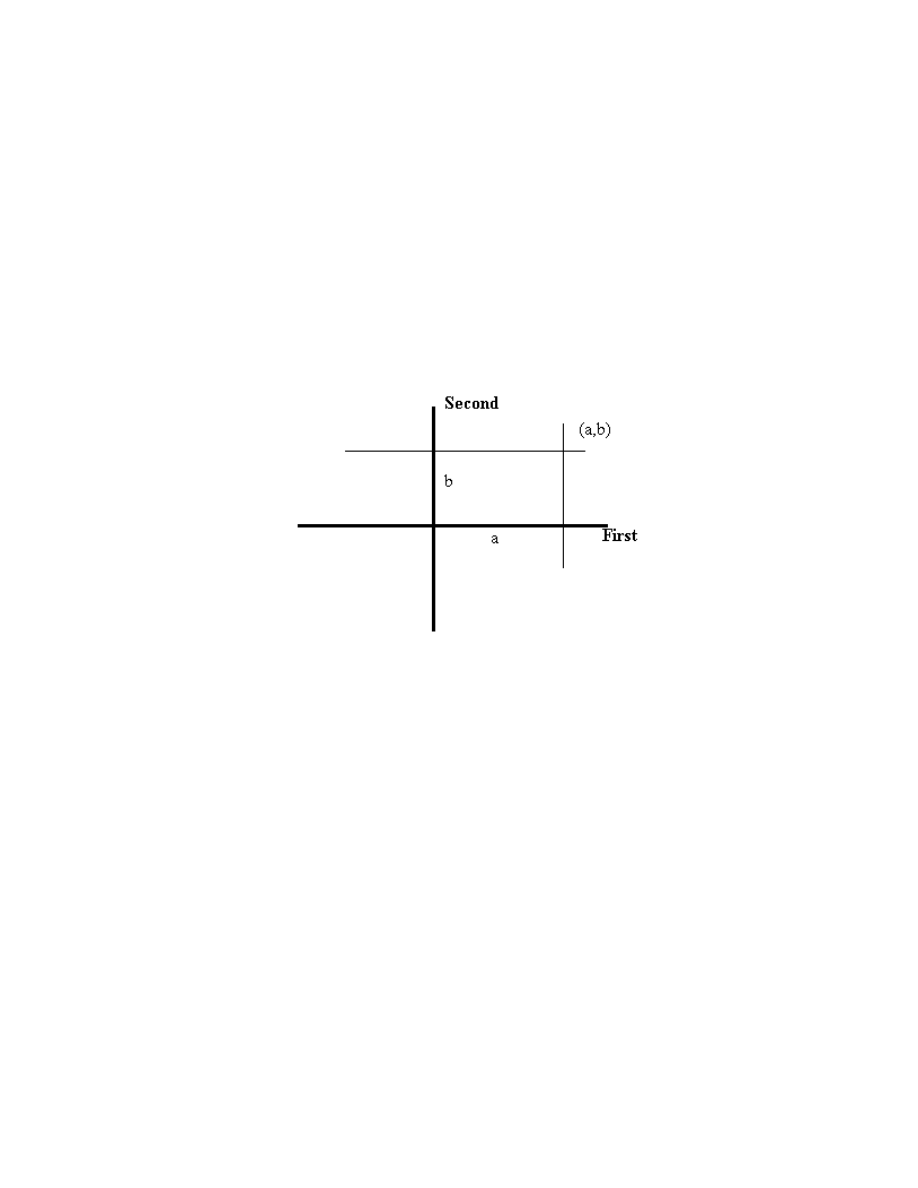
Next we establish a one-to-one correspondence between ordered pairs of real
numbers and points in a plane. Take a real line, called the first axis, and construct another
real line, called the second axis, perpendicular to it and passing through the origin of the
first axis. Choose this point as the origin for the second axis. Now suppose we have an
ordered pair (
,
)
x x
1
2
of reals. The point in the plane associated with this ordered pair is
1.2
found by constructing a line parallel to the second axis through the point on the first axis
corresponding to the real number x
1
, and constructing a line parallel to the first axis
through the point on the second axis corresponding to the real number
x
2
. The point at
which these two lines intersect is the point associated with the ordered pair (
,
)
x x
1
2
. A
moments reflection here will convince you that there is exactly one point in the plane thus
associated with an ordered pair (a, b), and each point in the plane is the point associated
with some ordered pair (a, b):
It is traditional to assume the point of view we have taken in this picture, in which
the first axis is horizontal, the second axis is vertical, the positive direction on the first
axis is to the right, and the positive direction on the second axis is up. We thus usually
speak of the horizontal axis and the vertical axis, rather than the first axis and the second
axis. We also frequently abuse the language by speaking of a point (
,
)
x x
1
2
when, of
course, we actually mean the point associated with the ordered pair (
,
)
x x
1
2
. The
numbers x
1
and
x
2
are called the coordinates of the point- x
1
is the first coordinate and
x
2
is the second coordinate.
Given any collection of ordered pairs( A collection of ordered pairs is called a
relation.), a picture of the collection is obtained by simply looking at the set of points in
the plane corresponding to the pairs in the given collection. Suppose we have an equation
1.3
involving two variables, say x and y. Then this equation defines a collection of ordered
pairs of numbers, namely all ( , )
x y that satisfy the equation. The corresponding picture
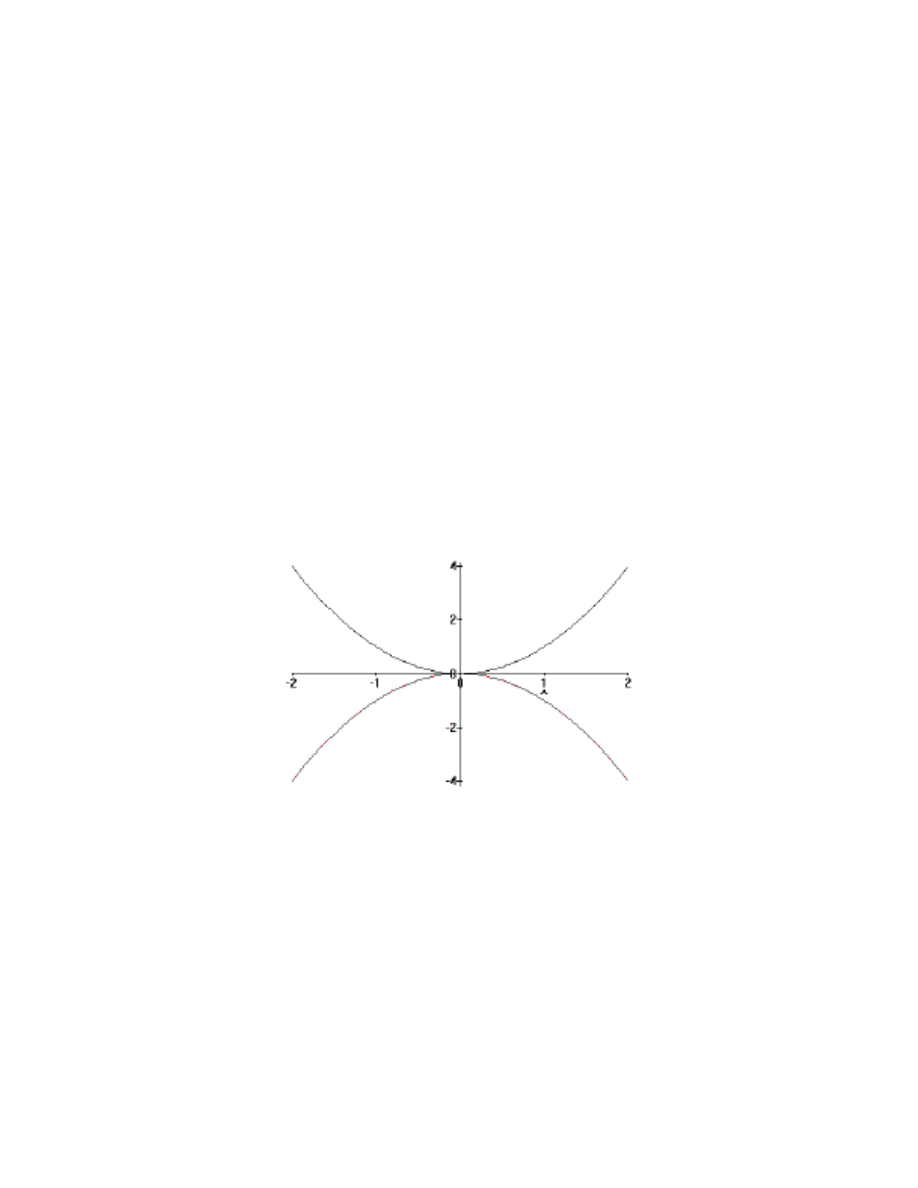
in the plane is called the graph of the equation. For example, consider the equation
y
x
2
4
=
. Let’s take a look at the graph of this equation. A little algebra (very little,
actually), convinces us that
{( , ):
}
{( , ):
}
{( , ):
}
x y y
x
x y y
x
x y y
x
2
4
2
2
=
=
=
∪
= −
,
and we remember from the sixth grade that each of the sets on the right hand side of this
equation is a parabola:
What do we do with all this? These constructions are, of course, the bases of
analytic geometry, in which we join the subjects of algebra and geometry, to the benefit of
both. A geometric figure (a subset of the plane ) corresponds to a collection of ordered
pairs of real numbers. Algebraic facts about the collection of ordered pairs of real are
reflected by geometric facts about the subset of the plane, and, conversely, geometric

1.4
facts about the plane subset are reflected by algebraic facts about the collection of pairs of
reals.
Exercises
Draw a picture of the given relation:
1.
R
x y
x
y
=
≤ ≤
≤ ≤
{( , ):
,
}
0
1
1
4
and
2.
R
x y
x
x
y
x
=
− ≤ ≤
−
≤ ≤
{( , ):
,
}
4
4
2
2
and
3.
R
x y
y
x y y
x
=
≤ ≤ ∩
≥
{( , ):
}
{( , ):
}
1
2
2
4.
S
x y x
y
x
=
+
=
≥
{( , ):
}
2
2
1
0
, and
5.
S
x y x
y
x y y
x
=
+
≤ ∩
≤
{( , ):
}
{( , ):
}
2
2
2
1
6.
E
r s
r
s
=
=
{( , ):| | | |}
7.
T
u v
u
v
=
+ =
{( , ):| | | |
}
1
8.
R
u v u
v
=
+ ≤
{( , ):| | | |
}
1
9.
T
x y x
y
=
=
{( , ):
}
2
2
10. A
x y x
y
=
≤
{( , ):
}
2
2
1.5
11. G
s t
s t
=
=
{( , ):
{| |,| |}
}
max
1
12. B
s t
s t
=
≤
{( , ):
{| |,| |}
}
max
1
1.2 Coordinates in Three-Space
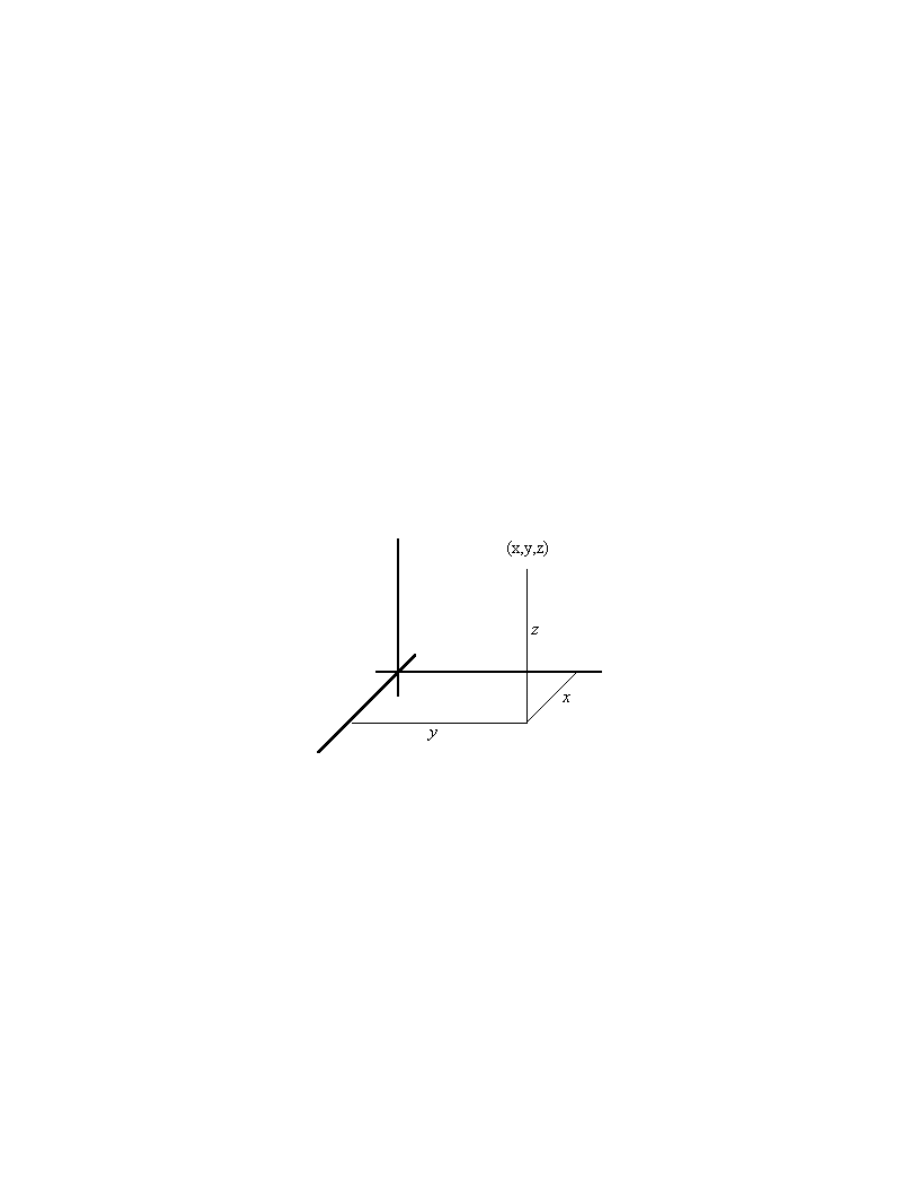
Now let’s see what’s doing in three dimensions. We shall associate with each
ordered triple of real numbers a point in three space. We continue from where we left off
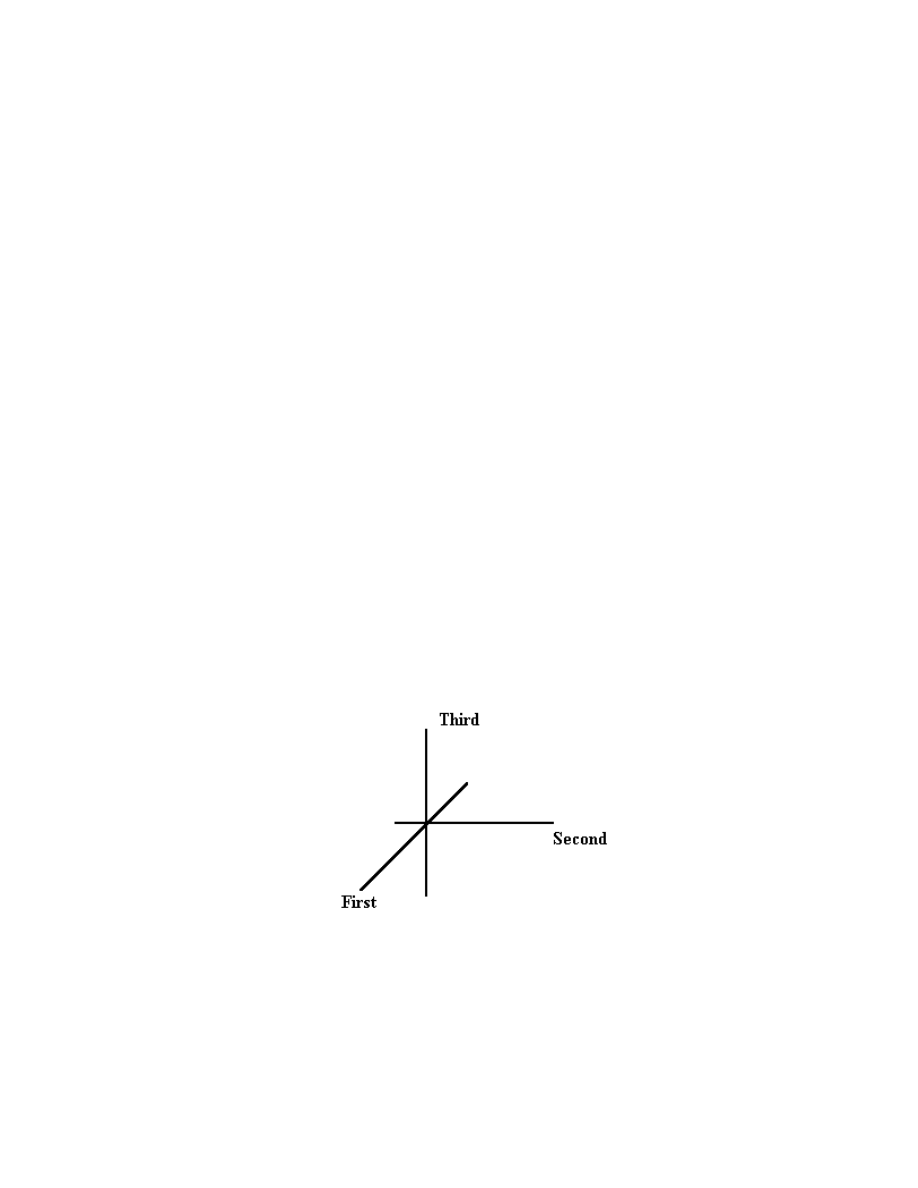
in the previous section. Start with the plane constructed in the previous section, and
construct a line perpendicular to both the first and second axes, and passing through the
origin. This is the third, axis. Now we must be careful about which direction on this
third axis is chosen as the positive direction; it makes a difference. The positive direction
is chosen to be the direction in which a right-hand threaded bolt would advance if the
positive first axis is rotated to the positive second axis:
We now see how to define a one-to-one correspondence between ordered triples
of real numbers (
,
,
)
x x x
1
2
3
and the points in space. The association is a simple extension
of the way in which we established a correspondence between ordered pair and points in
1.6
a plane. Here’s what we do. Construct a plane perpendicular to the first axis through the
point x
1
, a plane perpendicular to the second axis through
x
2
, and a plane perpendicular
to the third axis through x
3
. The point at which these three planes intersect is the point
associated with the ordered triple (
,
,
)
x x x
1
2
3
. Some meditation on this construction
should convince you that this procedure establishes a one-to-one correspondence between
ordered triples of reals and points in space. As in the two dimensional, or plane, case, x
1
is called the first coordinate of the point,
x
2
is called the second coordinate of the point,
and x
3
is called the third coordinate of the point. Again, the point corresponding to
( , , )
0 00 is called the origin, and we speak of the point (
,
,
)
x x x
1
2
3
, when we actually mean
the point which corresponds to this ordered triple.
The three axes so defined is called a coordinate system for three space, and the
three numbers x, y, and z , where ( , , )
x y z is the triple corresponding to the point P, are
called the coordinates of P. The coordinate axes are sometimes given labels-most
commonly, perhaps, the first axis is called the x axis, the second axis is called the y axis,
and the third axis is called the z axis.
1.7
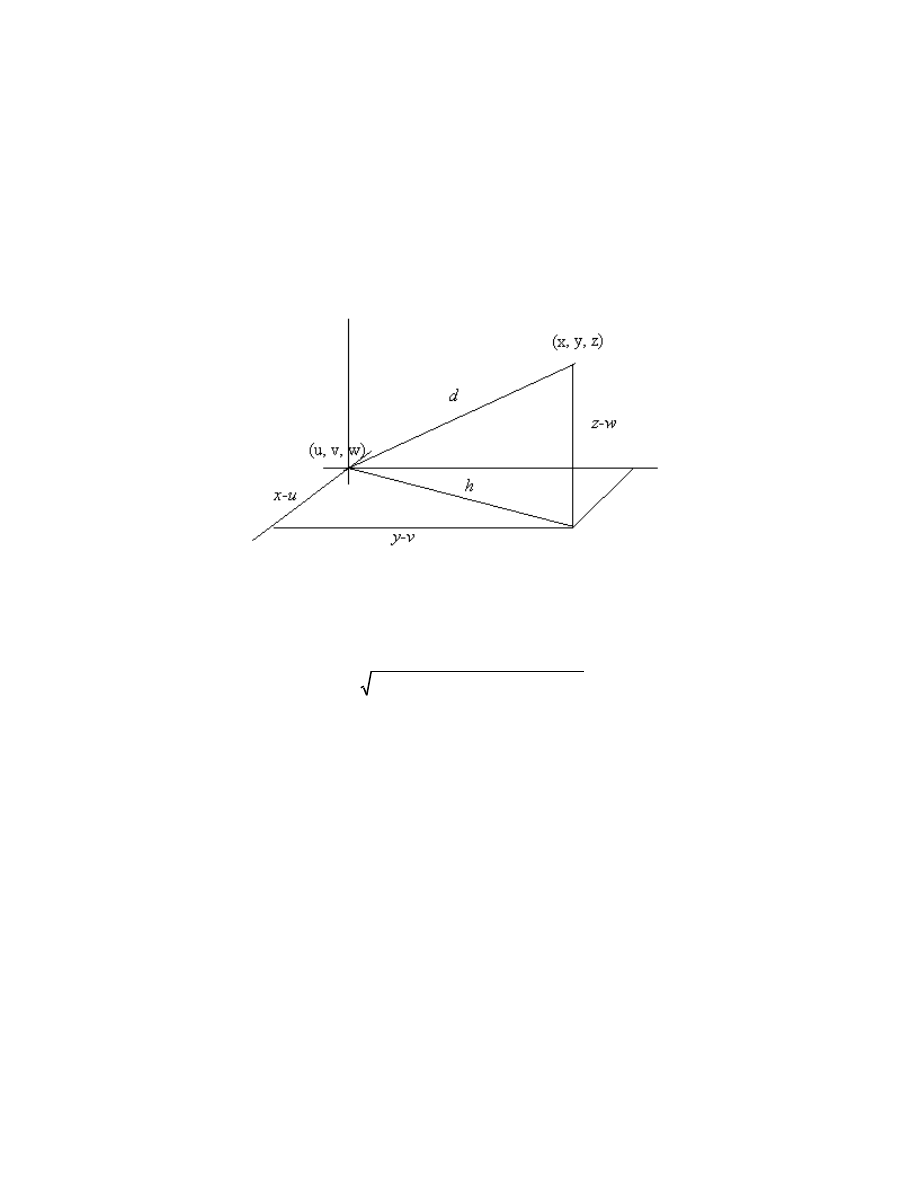
1.3 Some Geometry
Suppose P and Q are two points, and suppose space is endowed with a
coordinate system such that P
x y z
=
( , , ) and Q
u v w
=
( , , ) . How do we find the distance
between P and Q ? This simple enough; look at the picture:
We can see that d
h
z
w
2
2
2
=
+ −
(
) and h
x
u
y
v
2
2
2
=
−
+
−
(
)
(
) . Thus we have
d
x
u
y
v
z
w
2
2
2
2
=
−
+ −
+ −
(
)
(
)
(
) , or
d
x
u
y
v
z
w
=
−
+
−
+ −
(
)
(
)
(
)
2
2
2
.
We saw that in the plane an equation in two variables defines in a natural way a collection
of ordered pairs of numbers. The analogous situation obtains in three-space: an equation
in three variables defines a collection of ordered triples. We thus speak of the collection
of triples ( , , )
x y z which satisfy the equation
x
y
z
2
2
2
1
+
+
=
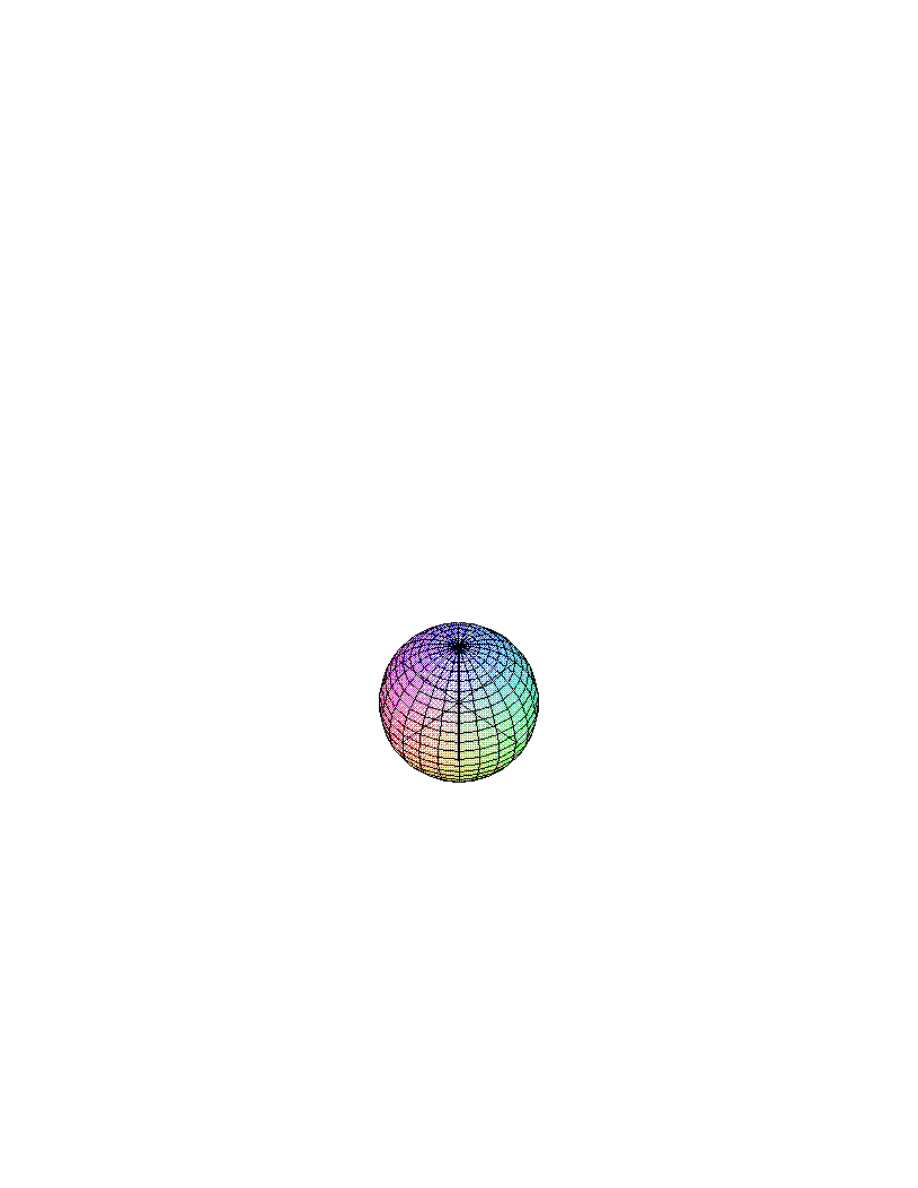
1.8
The collection of all such points is the graph of the equation. In this example, it is easy
to see that the graph is precisely the set of all points at a distance of 1 from the origin-a
sphere of radius 1 and center at the origin.
The graph of the equation x
=
0 is simply the set of all points with first
coordinate 0, and this is clearly the plane determined by the second axis and the third axis,
or the y axis and the z axis. When the axes are labeled x, y, and z, this is known as the yz
plane. . Similarly, the plane y
=
0 is the xz plane, and z
=
0 is the xy plane. These
special planes are also called the coordinate planes.
More often than not, it is difficult to see exactly what a graph of equation looks
like, and even more difficult for most of us to draw it. Computers can help, but they
usually draw rather poor pictures whose main application is in stimulating your own
imagination sufficiently to allow you to see the graph in your mind’s eye. An example:
This picture was drawn using Maple.
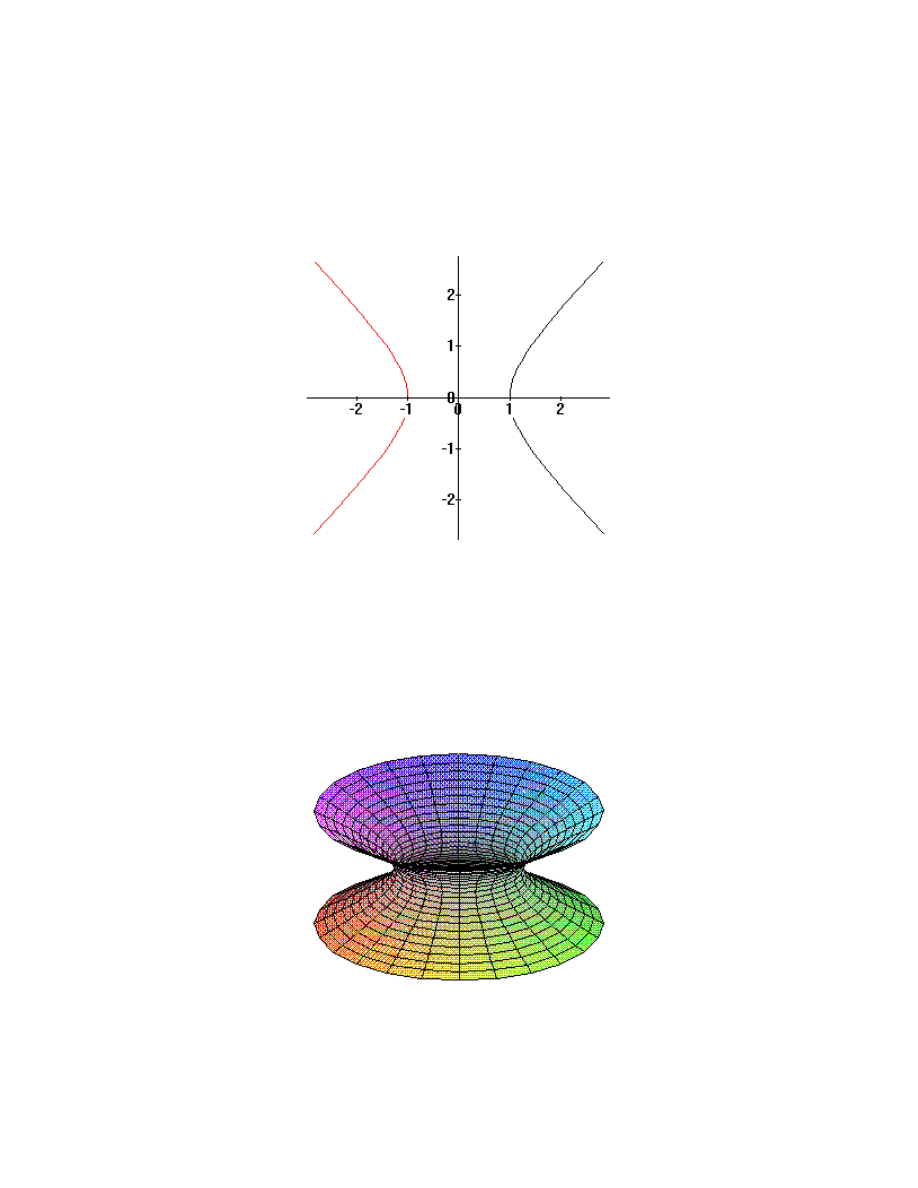
Let’s look at a more complicated example. What does the graph of
x
y
z
2
2
2
1
+
−
=
look like? We’ll go after a picture of this one by slicing the graph with the coordinate
planes. First, let’s slice through it with the plane z
=
0 ; then we see
1.9
x
y
2
2
1
+
=
,
a circle of radius 1 centered at the origin. Next, let’s slice with the plane y
=
0 . Here we
see x
z
2
2
1
−
=
, a hyperbola:
We, of course, see the same hyperbola when we slice the graph with the plane
x
=
0 . What the graph looks like should be fairly clear by now:

1.10
This graph has a name; it is called a hyperboloid.
Exercises
13. Describe the set of points S
x y z x
y
z
=
≥
≥
≥
{( , , ):
,
}
0
0
0
, and
.
14. Describe the following sets
a) S
x y z
=
≥
{( , , ): z
0}
b) S
x y z
x
=
≥
{( , , ):
}
5
c) R
x y z
x
y
=
+
≤
{( , , ):
}
2
2
1
d) T
r s t
r
s
t
=
+
+ ≤
{( , , ):
}
2
2
2
4
15. Let G be the graph of the equation x
y
z
2
2
2
4
9
36
+
+
=
.
a)Sketch the graphs of the curves sliced from G by the coordinate planes x
=
0 ,
y
=
0 , and z
=
0 .
b)Sketch G. (This graph is called an ellipsoid.)
16. Let G be the graph of the equation x
y
z
2
2
2
3
4
12
−
+
=
.
a)Sketch the graphs of the curves sliced from G by the coordinate planes x
=
0 ,
y
=
0 , and z
=
0 .
b)Sketch G. (Does this set look at all familiar to you?.)
1.4 Some More Geometry-Level Sets
The curves that result from slicing the graphs with the coordinate planes are
special cases of what are called level sets of a set. Specifically, if S is a set, the
intersection of S with a plane z
=
constant is called a level set. In case the level set is a
1.11
curve, it is frequently called a level curve. (The slices by planes x = constant, or y =
constant are also level sets.) A family of level sets can provide a nice stimulant to your
powers of visualization. Everyday examples of the use of level sets to describe a set are
contour maps, in which the contours are, of course, just level curves ; and weather maps,
in which, for instance, the isoclines on a 500mb chart are simply level curves for the
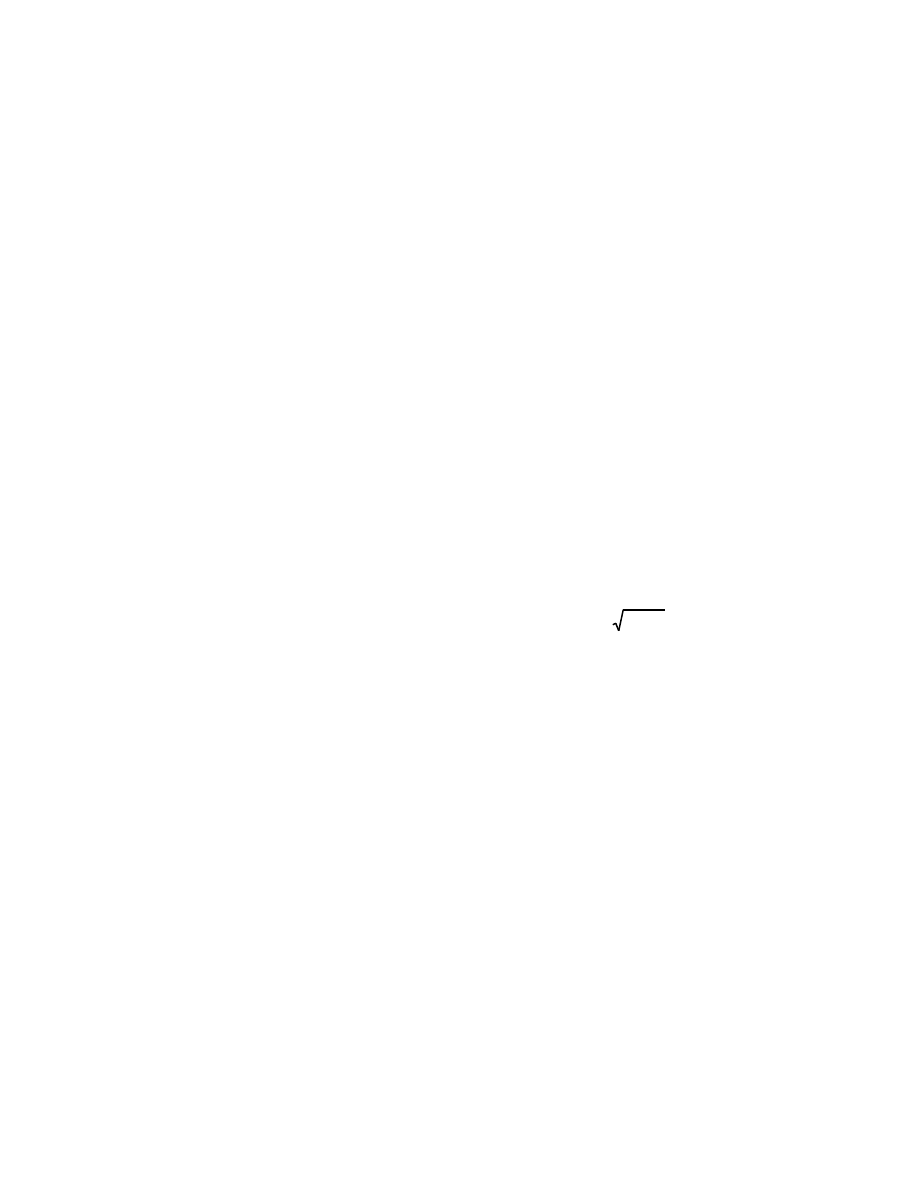
500mb surface. Let’s illustrate with an example.
Let S be the graph of
z
y
x
2
2
2
1
−
−
=
Now we look at the level set z
c
=
:
c
y
x
2
2
2
1
−
−
=
, or
x
y
c
2
2
2
1
+
=
−
.
Notice first that we have the same curve for z = c and z = -c. The graph is symmetric
about the plane z = 0. We shall thus look at just that part of the graph that is above the
xy plane.
It is clear that these curves are concentric circles of radius
c
2
1
−
centered at the
origin. There are no level sets for | |
c
<
1, and for c = 1 or -1, the level set is a single point,
the origin.
1.12
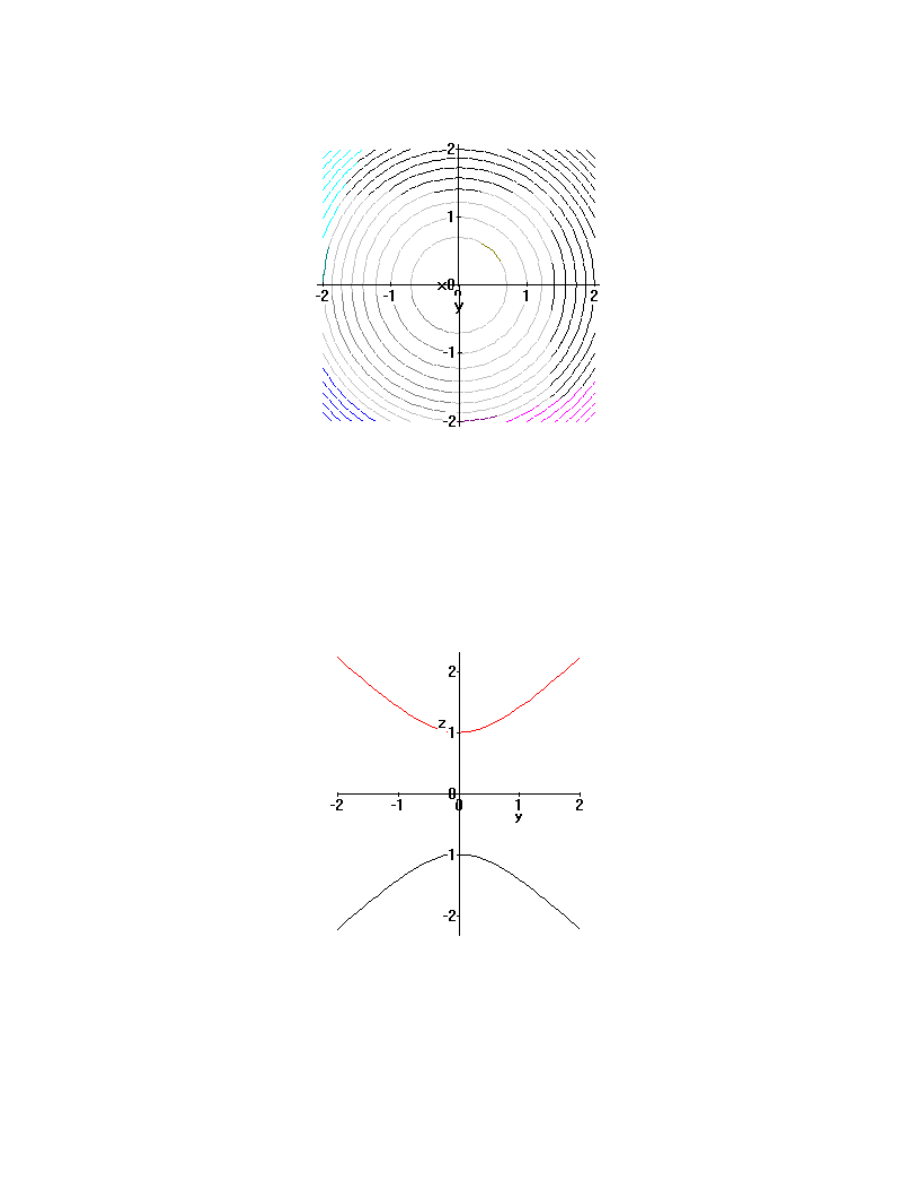
Next, slice with the planes x = 0 and y = 0 to get a better idea of what this thing
looks like. For x = 0, we see
z
y
2
2
1
−
=
,
a hyperbola:
The slice by y = 0, of course, is the same. It is rather easy to visualize this graph. Here is
a Maple drawn picture:
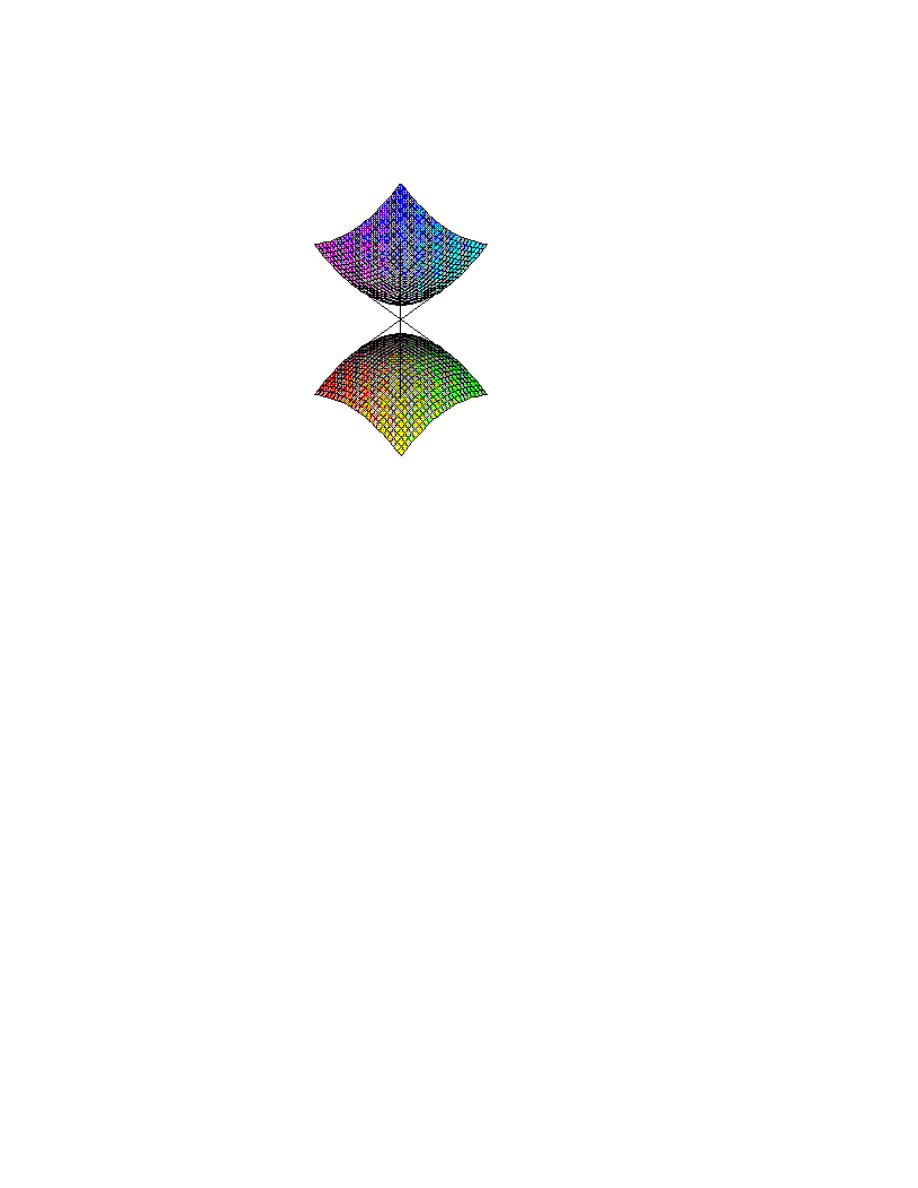
1.13
This also is called a hyperboloid. This is a hyperboloid of two sheets, while the
previously described hyperboloid is a hyperboloid of one sheet.
Exercises
17. Let S
x x x
x
x
x
=
+
+
=
{(
,
,
):|
| |
| |
|
}
1
2
3
1
2
3
1 .
a)Sketch the coordinate plane slices of S.
b)Sketch the set S.
18. Let C be the graph of the equation z
x
y
2
2
2
4
=
+
(
) .
a)Sketch some level sets z = c.
b)Sketch the slices by the planes x = 0 and y = 0.
c)Sketch C. What does the man on the street call this set?
19. Using level sets, coordinate plane slices, and whatever, describe the graph of the
equation z
x
y
=
+
2
2
. (This one has a name also; it is a paraboloid.).

1.14
20. Using level sets, coordinate plane slices, and whatever, describe the graph of the
equation z
x
y
=
−
2
2
.
Wyszukiwarka
Podobne podstrony:
Multivariable Calculus, cal14
Multivariable Calculus, cal6
Multivariable Calculus, cal19
Multivariable Calculus, cal2
Multivariable Calculus, cal16
Multivariable Calculus, cal8
Multivariable Calculus, cal18
Multivariable Calculus, cal12
Multivariable Calculus, cal15
Multivariable Calculus, cal9
Multivariable Calculus, cal11
Multivariable Calculus, cal5
Multivariable Calculus, cal10
Multivariable Calculus, ta
Multivariable Calculus, cal3
Multivariable Calculus, cal7
Multivariable Calculus, cal13
Multivariable Calculus, cal4
Multivariable Calculus, cal17
więcej podobnych podstron