M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Charakterystyki czasowe
92
Charakterystyką (odpowiedzią) czasową nazywamy przebieg w czasie
odpowiedzi układu (sygnału wejściowego) na określone, standardowe
pobudzenie u(t) podane na wejście układu będącego w stanie równowagi.
Najpopularniejsze charakterystyki:
1. Odpowiedź na skok jednostkowy (odpowiedź skokowa)
2. Odpowiedź na impuls jednostkowy (odpowiedź impulsowa)
UWAGA: pobudzenie impulsowe nie jest realizowane fizycznie!
úû
ù
êë
é
=
î
í
ì
³
<
=
×
=
-
)
(
)
(
0
dla
1
0
dla
0
)
(
)
(
1
s
G
s
a
L
t
h
t
t
t
a
t
u
1
[
]
)
(
)
(
1
)
(
,
0
dla
0
dla
0
)
(
)
(
1
-
s
G
L
t
g
t
t
t
t
t
u
-
¥
¥
=
=
î
í
ì
=
¥
¹
=
=
ò
d
d
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Charakterystyki czasowe
93
Najpopularniejsze charakterystyki:
3. Odpowiedź na pobudzenie rampą
4. Odpowiedź na sygnał sinusoidalny
úû
ù
êë
é
=
î
í
ì
³
×
<
=
×
×
=
-
)
(
)
(
0
dla
0
dla
0
)
(
)
(
2
1
s
G
s
b
L
t
v
t
t
b
t
t
t
b
t
u
1
úû
ù
êë
é
+
=
=
-
)
(
)
(
)
sin(
)
(
2
1
s
G
s
L
t
y
t
A
t
u
w
w
w
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon bezinercyjny
94
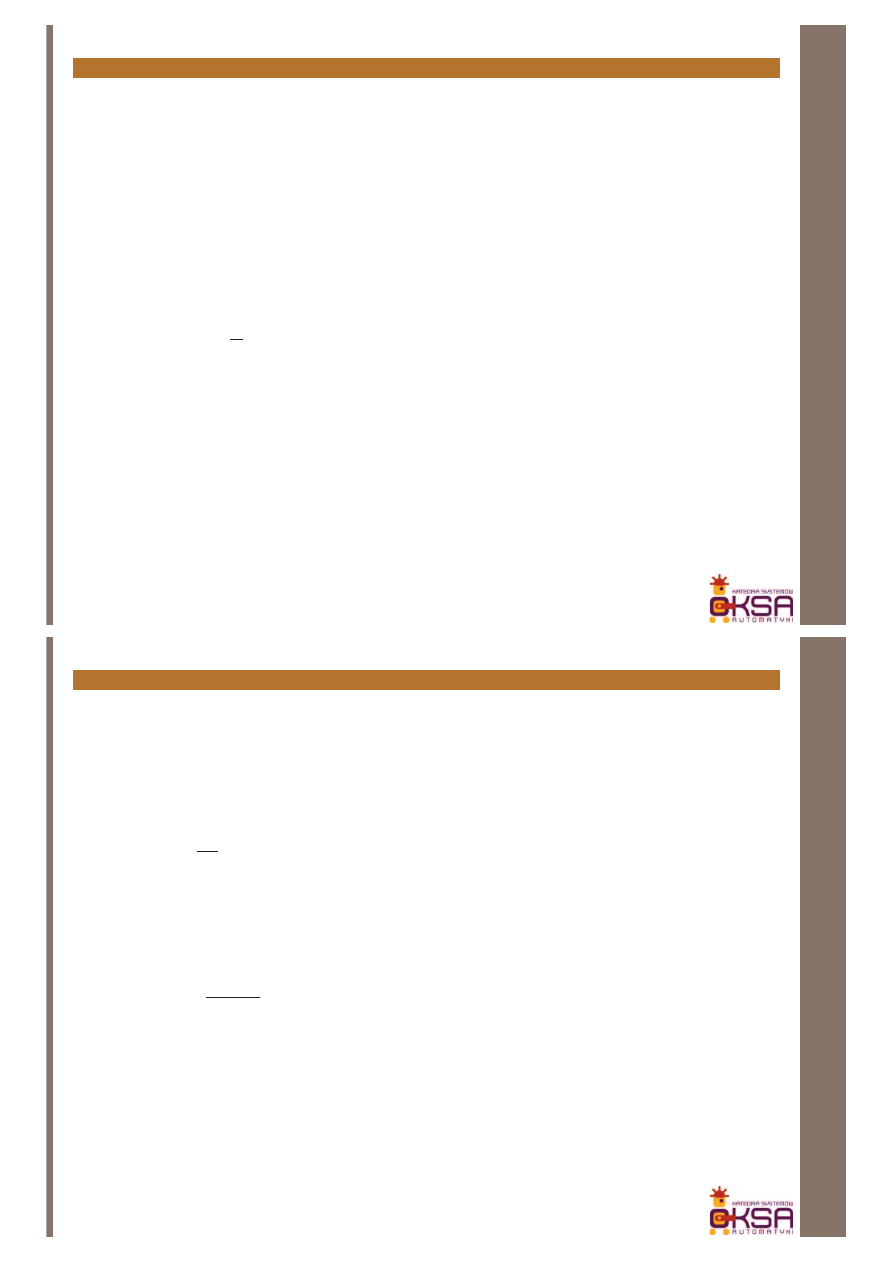
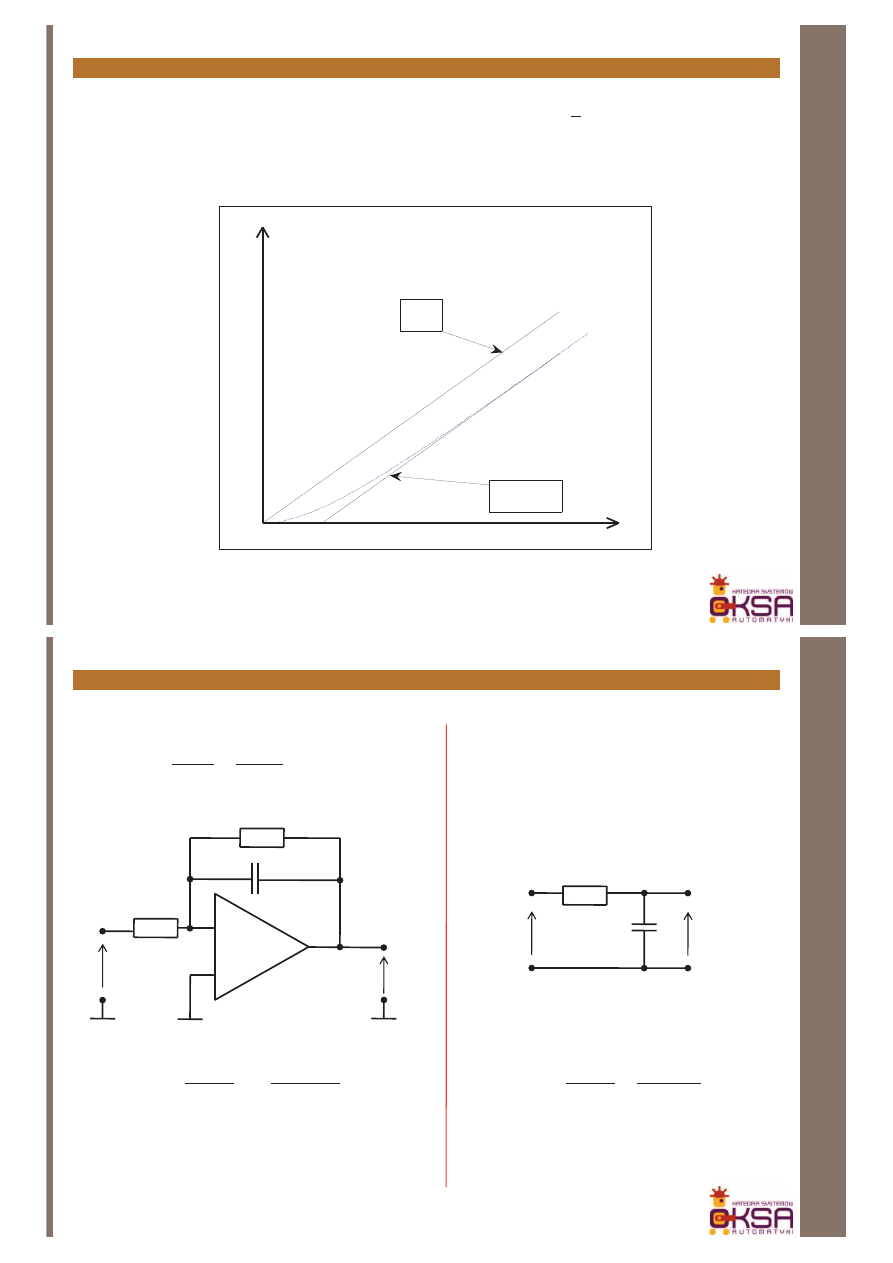
1. Człon bezinercyjny (wzmacniający)
y(t)
u(t)
)
(
)
(
t
ku
t
y
=
y(t)
t
k
u
1
(t)
u
2
(t)
R
1
R
2
2
1
2
1
2
)
(
)
(
)
(
R
R
R
s
U
s
U
s
G
+
=
=
f
1
(t)
f
2
(t)
L
1
L
2
2
1
1
2
)
(
)
(
)
(
L
L
s
F
s
F
s
G
-
=
=
k
s
G
=
)
(
Inżynieria systemów dynamicznych
G(s)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon bezinercyjny, przykład
95
R
2
+
_
R
1
u
1
(t)
u
2
(t)
1
2
1
2
)
(
)
(
)
(
R
R
s
U
s
U
s
G
-
=
=
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon całkujący
96
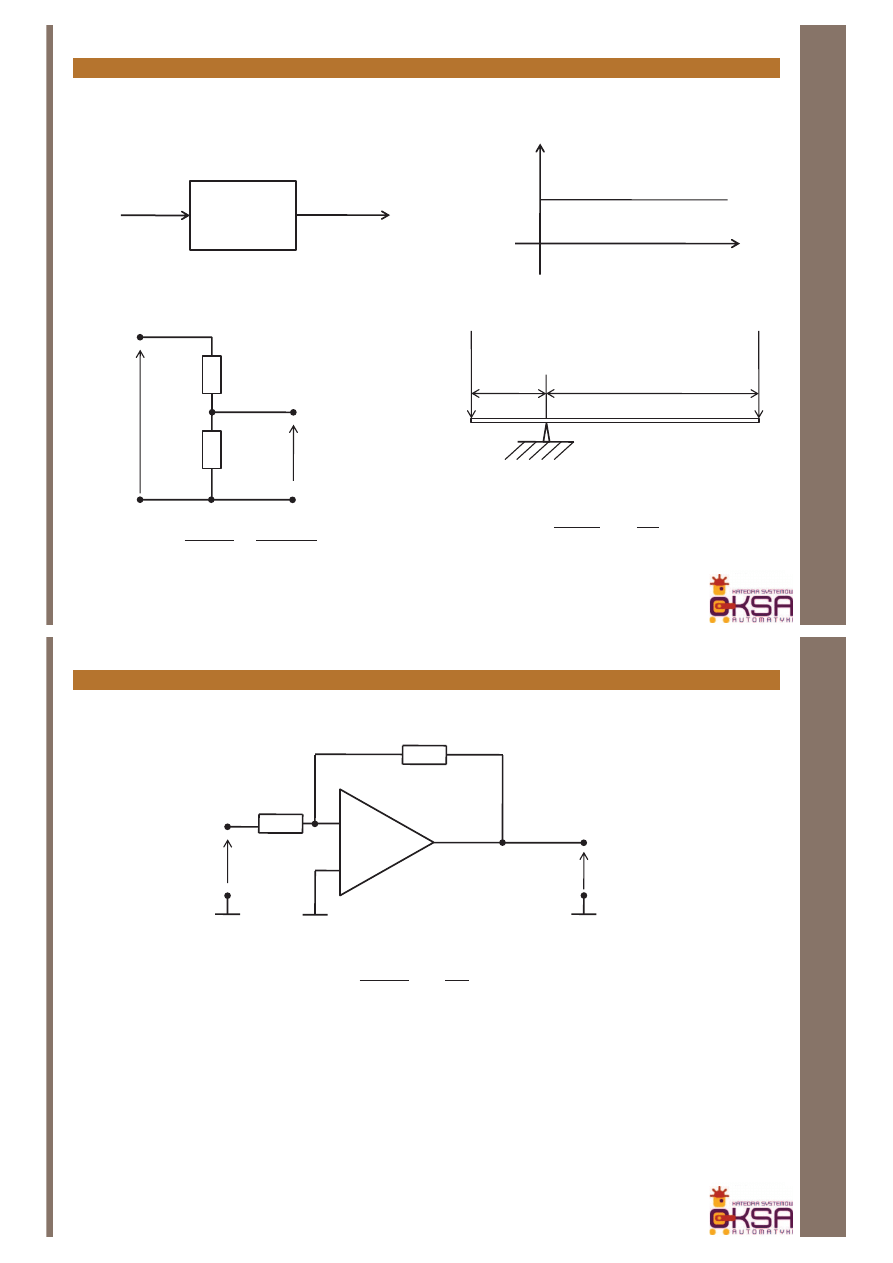
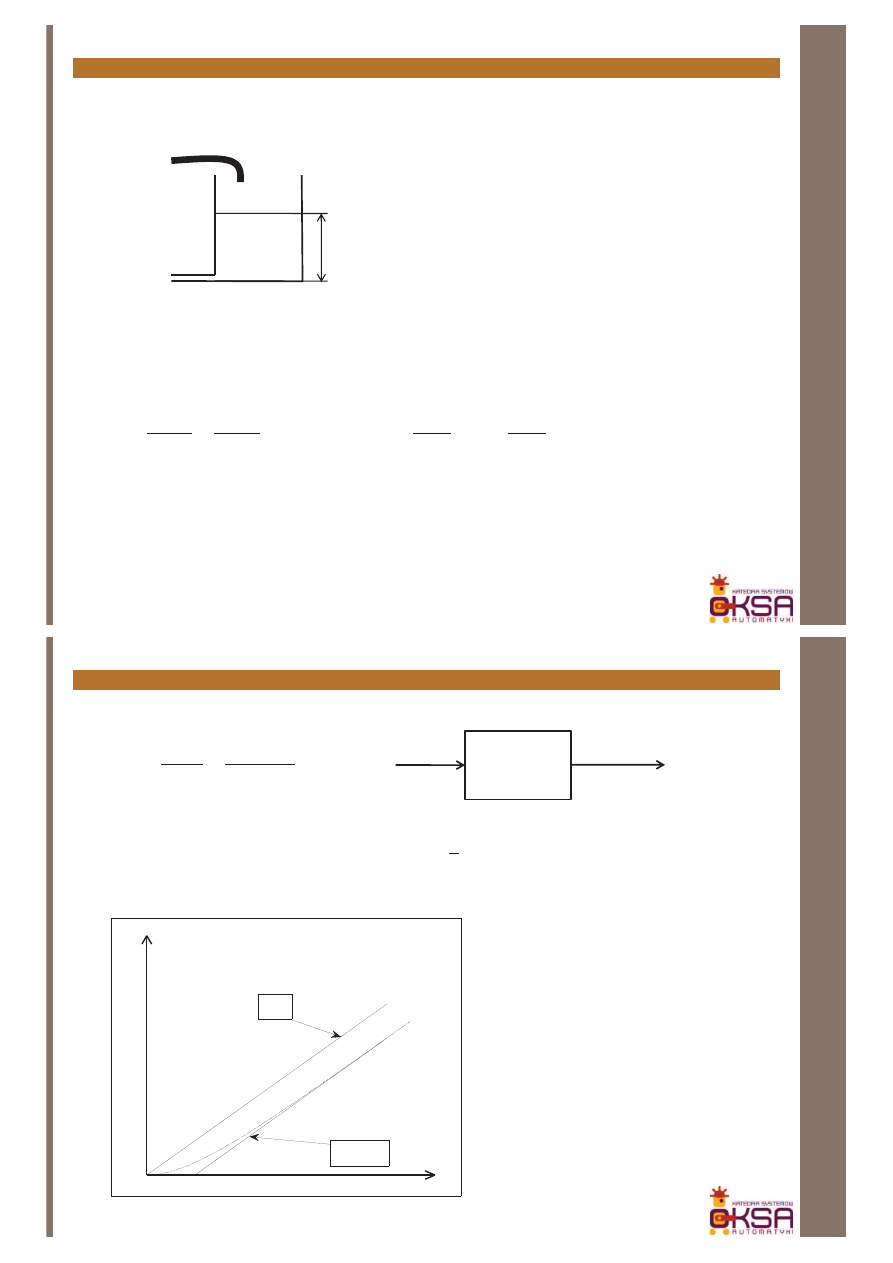
2. Człon całkujący
y(t)
u(t)
ò
×
=
t
I
u
k
t
y
0
d
)
(
)
(
t
t
Odpowiedź skokowa
s
k
s
U
s
Y
s
G
I
=
=
)
(
)
(
)
(
t
y(t)
k
I
1
)
(
)
(
)
(
)
(
t
t
k
t
y
t
t
u
I
1
1
×
×
=
Þ
=
Inżynieria systemów dynamicznych
G(s)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon całkujący
97
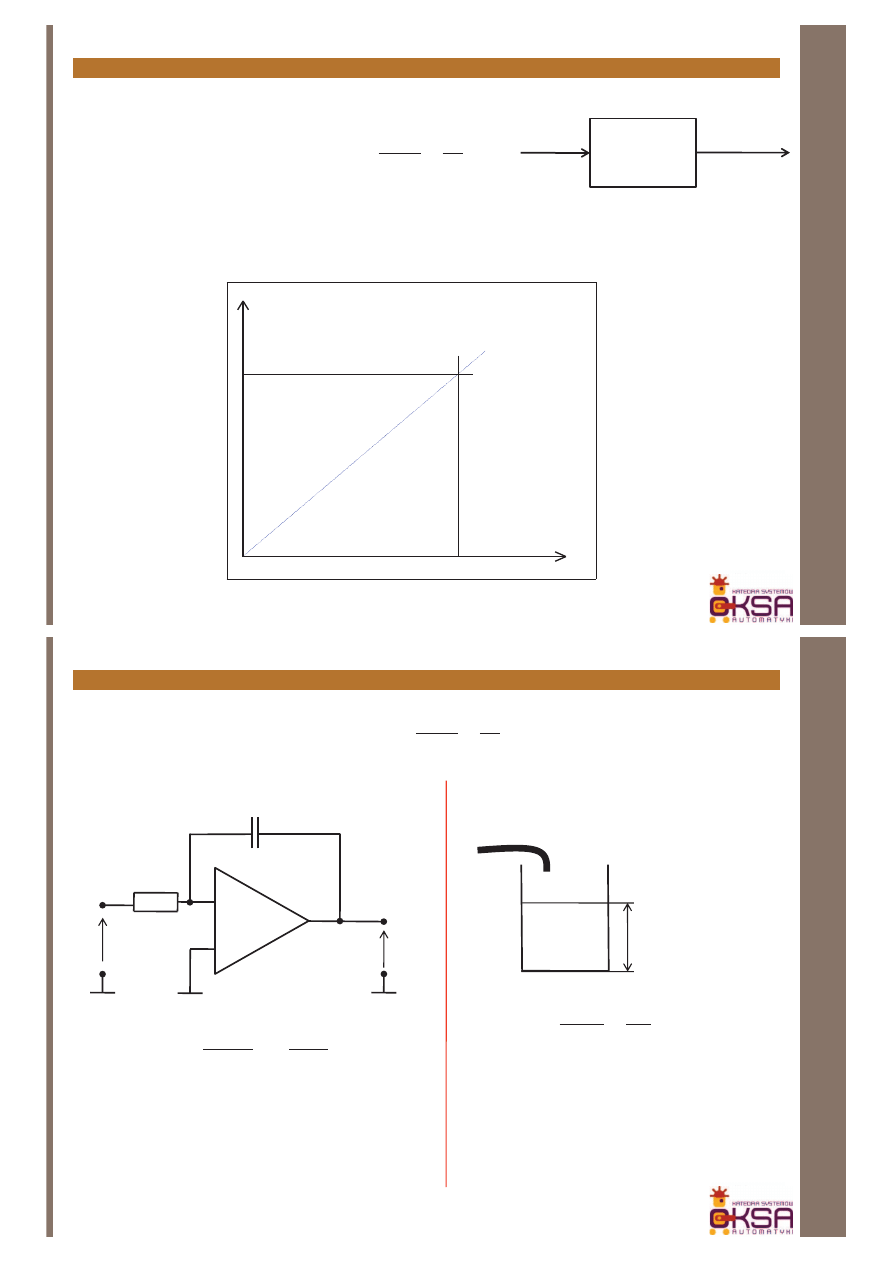
h(t)
As
s
Q
s
H
s
G
1
)
(
)
(
)
(
=
=
q(t)
q(t)-natężenie przepływu [m
3
/s]
A – powierzchnia dna zbiornika [m
2
]
C
+
_
R
u
1
(t)
u
2
(t)
RCs
s
U
s
U
s
G
1
)
(
)
(
)
(
1
2
-
=
=
s
k
s
U
s
Y
s
G
I
=
=
)
(
)
(
)
(
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu
98
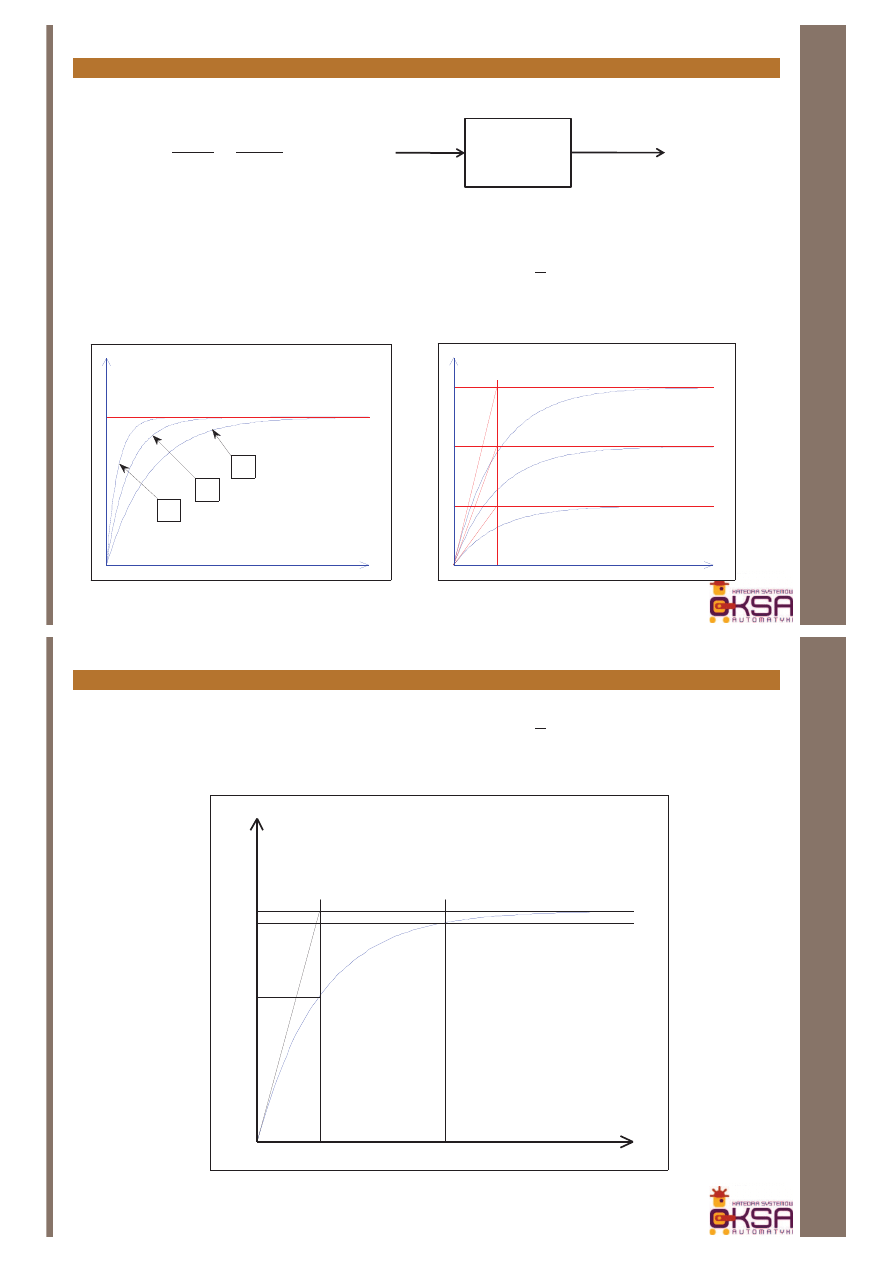
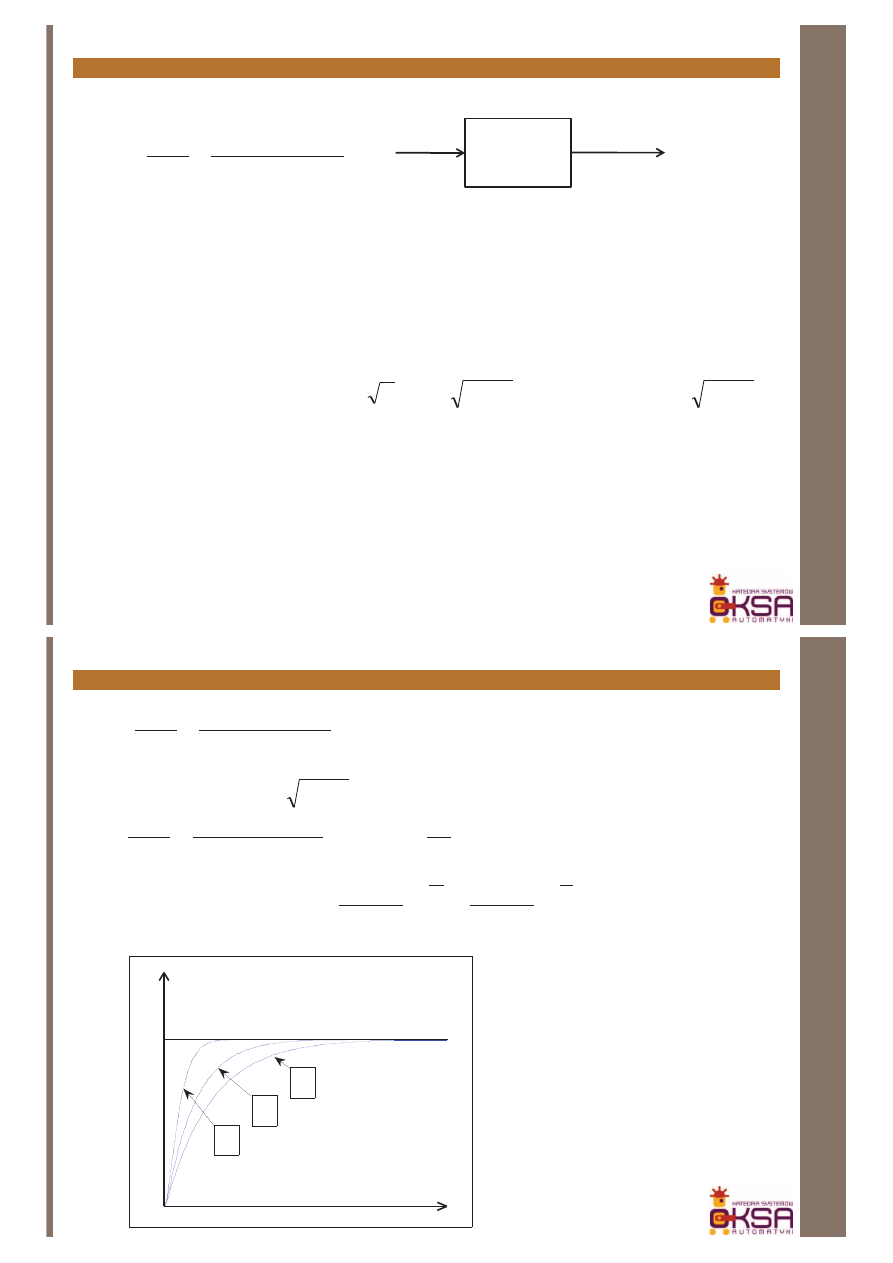
3. Człon inercyjny I rzędu
y(t)
u(t)
1
)
(
)
(
)
(
+
=
=
Ts
k
s
U
s
Y
s
G
t
y(t)
T
1
T
2
k
T
3
T
1
<T
2
<T
3
t
y(t)
k
1
k
2
k
3
T
k
1
<k
2
<k
3
Odpowiedzi skokowe dla różnych parametrów transmitancji
)
(
1
)
(
)
(
)
(
t
e
k
t
y
t
t
u
T
t
1
1
×
ú
û
ù
ê
ë
é
-
=
Þ
=
-
Inżynieria systemów dynamicznych
G(s)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu, parametry odpowiedzi skokowej
99
)
(
1
)
(
)
(
)
(
t
e
k
t
y
t
t
u
T
t
1
1
×
ú
û
ù
ê
ë
é
-
=
Þ
=
-
t
y(t)
0,63k
0,95k
k
T
3T
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu, parametry odpowiedzi na rampę
100
)
(
)
(
)
(
)
(
t
Te
T
t
k
t
y
t
t
t
u
T
t
1
1
×
ú
û
ù
ê
ë
é
+
-
=
Þ
×
=
-
t
y(t)
T
k(t-T)
kt
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu, przykłady
101
C
+
_
u
1
(t)
u
2
(t)
1
/
)
(
)
(
)
(
2
1
2
1
2
+
-
=
=
Cs
R
R
R
s
U
s
U
s
G
1
)
(
)
(
)
(
+
=
=
Ts
k
s
U
s
Y
s
G
R
2
R
1
R
u
1
(t)
u
2
(t)
C
1
1
)
(
)
(
)
(
1
2
+
=
=
RCs
s
U
s
U
s
G
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu
102
h(t)
1
)
(
)
(
)
(
+
=
=
Ts
k
s
Q
s
H
s
G
q(t)
Uwaga: wypływ ze zbiornika laminarny (natężenie przepływu zależy liniowo
od ciśnienia na dnie zbiornika ze współczynnikiem α).
q
2
(t)=αp(t)= αρgh(t)
q
2
(t)
g
A
g
k
ar
ar
=
=
T
,
1
q(t)-natężenie przepływu [m
3
/s]
A – powierzchnia dna zbiornika [m
2
]
p(t) – ciśnienie przy odpływie [Pa]
g – przyśpieszenie ziemskie [m/s
2
]
ρ -gęstość cieczy [kg/m
3
]
Uwaga 2: w przypadku, gdyby w rurze na wylocie zbiornika znajdowała się
kryza (gwałtowne przewężenie) lub zawór, to charakterystyka wypływu
miałaby charakter pierwiastkowy (patrz zbiór zadań)
gdzie:
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu
103
4. Człon całkujący z inercją
y(t)
u(t)
)
1
(
)
(
)
(
)
(
+
=
=
Ts
s
k
s
U
s
Y
s
G
Odpowiedź skokowa:
)
(
)
(
)
(
)
(
t
Te
T
t
k
t
y
t
t
u
T
t
1
1
×
ú
û
ù
ê
ë
é
+
-
=
Þ
=
-
t
y(t)
T
k(t-T)
kt
Typowy układ: silnik prądu stałego,
gdzie wejściem jest podane napięcia
a wyjściem kąt o jaki obrócił się wał
silnika
Inżynieria systemów dynamicznych
G(s)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon inercyjny I rzędu
104
5. Człon II rzędu
y(t)
u(t)
2
2
2
2
)
(
)
(
)
(
n
n
n
s
s
k
s
U
s
Y
s
G
w
zw
w
+
+
=
=
Jak pamiętamy, postać odpowiedzi układu zależy od miejsc zerowych wielomianu
mianownika transmitancji, które w omawianym przypadku wynoszą:
(
)
1
1
2
1
4
4
4
2
12
2
2
2
2
2
2
-
±
-
=
Þ
-
=
D
Þ
-
=
-
=
D
z
w
zw
z
w
z
w
w
w
z
n
n
n
n
n
n
s
0
0
>
³
n
w
z
gdzie:
- współczynnik tłumienia
- pulsacja drgań naturalnych
Inżynieria systemów dynamicznych
G(s)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ dwuinercyjny
105
2
2
2
2
)
(
)
(
)
(
n
n
n
s
s
k
s
U
s
Y
s
G
w
zw
w
+
+
=
=
Przypadek pierwszy: wielomian mianownika ma dwa pierwiastki rzeczywiste ujemne
1
1
2
12
-
±
-
=
Þ
³
z
w
zw
z
n
n
s
12
12
2
1
1
gdzie
,
)
1
)(
1
(
)
(
)
(
)
(
s
T
s
T
s
T
k
s
U
s
Y
s
G
=
+
+
=
=
)
(
1
)
(
)
(
)
(
1
2
2
1
1
2
1
2
t
e
T
T
T
e
T
T
T
k
t
y
t
t
u
T
t
T
t
1
1
×
ú
ú
û
ù
ê
ê
ë
é
-
-
-
+
=
Þ
=
-
-
Inżynieria systemów dynamicznych
t
y(t)
1
z
2
z
3
z
1
1=
z
1
<
z
2
<
z
3
,
w = const
Uwaga: Dla ζ=1 odpowiedź
aperiodyczna krytyczna, najszybsza
możliwa odpowiedź bez
przeregulowań
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ oscylacyjny
106
Przypadek drugi: wielomian mianownika ma dwa pierwiastki zespolone sprzężone
2
12
1
1
0
z
w
zw
z
-
±
-
=
Þ
<
<
n
n
j
s
(
)
)
(
1
sin
1
1
1
)
(
)
(
)
(
2
2
t
e
t
k
t
y
t
t
u
t
n
n
1
1
×
ú
ú
û
ù
ê
ê
ë
é
×
+
-
×
-
-
×
=
Þ
=
-
zw
j
z
w
z
t
y(t)
k
w
1
w
3
w
2
w
1
<
w
2
<
w
3
,
z=const
t
y(t)
k
z
2
z
3
z
1
0<
z
1
<
z
2
<
z
3
<1 ,
w = const
( )
z
j
arccos
=
gdzie:
Inżynieria systemów dynamicznych
t
y(t)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
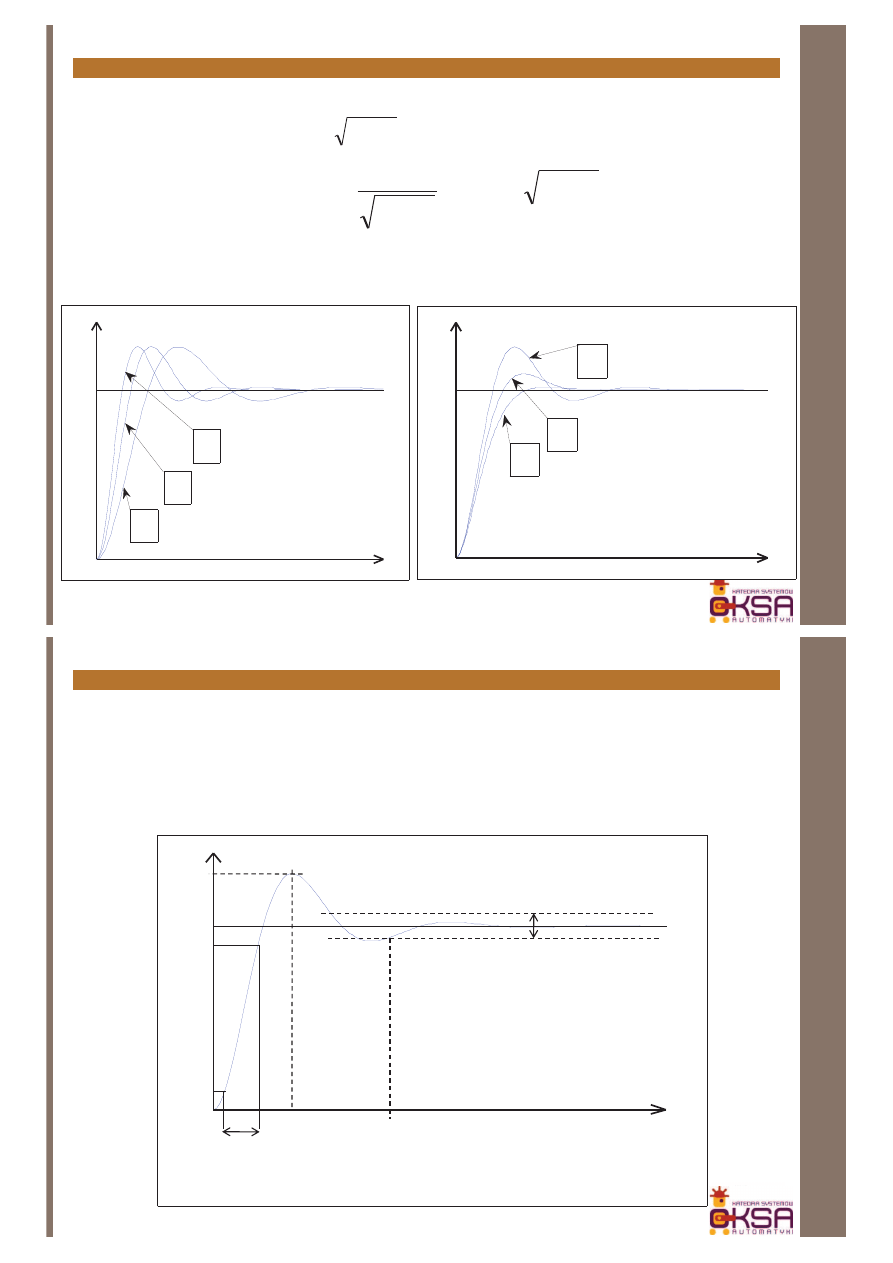
Człony układów regulacji – układ oscylacyjny – parametry odpowiedzi skokowej
107
T
n
– czas narastania odpowiedzi
T
d
– czas ustalania (d – najczęściej w procentach)
T
P
– czas maksymalnego przeregulowania
M
P
– maksymalne przeregulowanie
Inżynieria systemów dynamicznych
k
0.9k
0.1k
2dk
T
n
T
P
T
d
M
P
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ oscylacyjny – parametry odpowiedzi skokowej
108
T
n
– czas narastania odpowiedzi
T
d
– czas ustalania (d – najczęściej w procentach)
T
P
– czas maksymalnego przeregulowania
M
P
– maksymalne przeregulowanie
lub w procentach:
Inżynieria systemów dynamicznych
n
n
T
w
8
,
1
=
n
n
T
T
zw
zw
3
,
4
%
5
%
2
=
=
2
1
z
w
p
-
=
n
P
T
÷
÷
ø
ö
ç
ç
è
æ
+
=
-
-
2
1
1
z
zp
e
k
M
P
%
100
%
100
2
1
%
×
=
×
-
=
-
-
z
zp
e
k
k
M
M
P
P
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ oscylacyjny
109
Przypadek trzeci: wielomian mianownika ma dwa pierwiastki urojone sprzężone
n
j
s
w
z
±
=
Þ
=
12
0
( )
[
]
)
(
cos
1
)
(
)
(
)
(
t
t
k
t
y
t
t
u
n
1
1
×
-
×
=
Þ
=
w
Inżynieria systemów dynamicznych
t
y(t)
k
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ II rzędu, przykłady, układy RLC
110
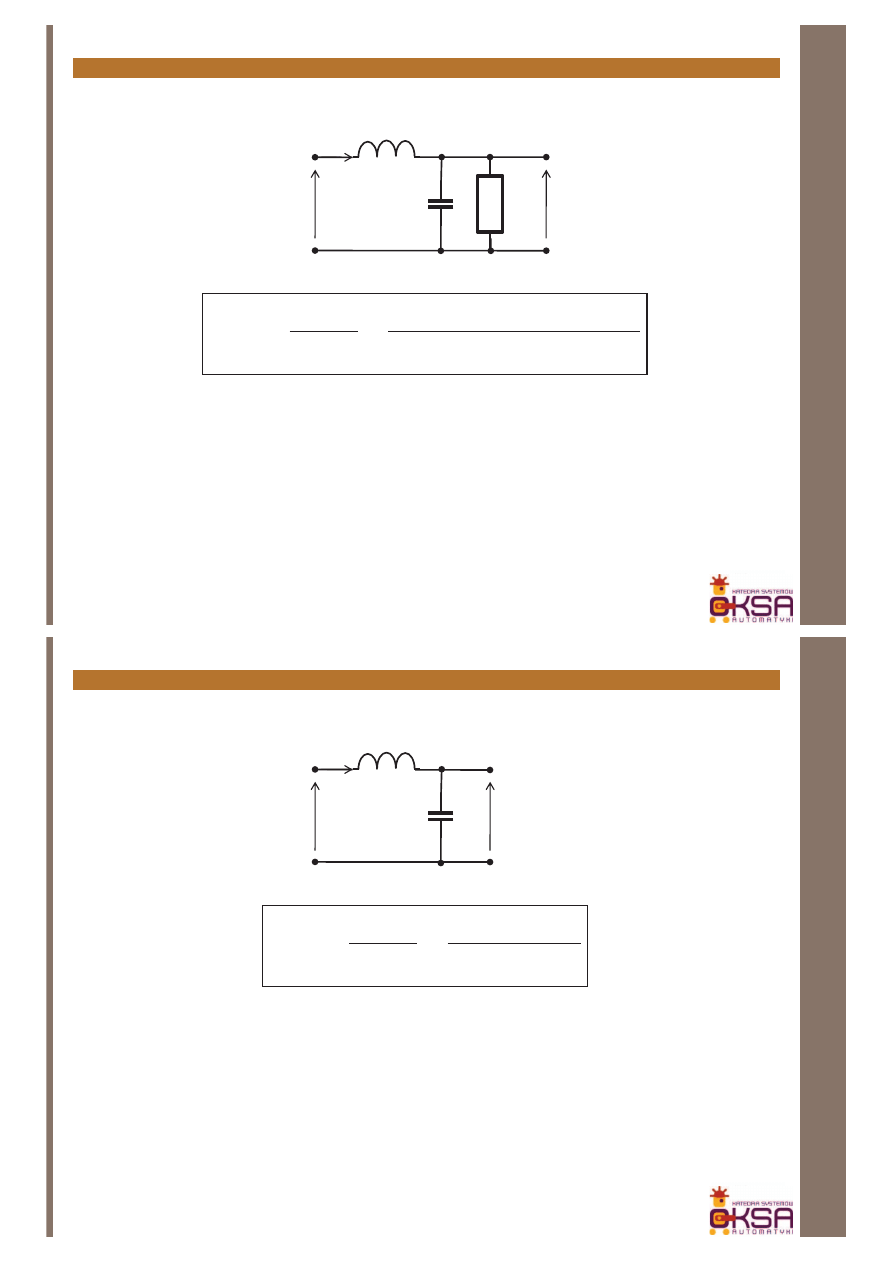
Układ RLC
R
u
2
(t)
u
1
(t)
L
C
i
L
(t)
)
/(
1
)
/(
1
)
/(
1
)
(
)
(
)
(
2
1
2
LC
s
RC
s
LC
s
U
s
U
s
G
+
+
=
=
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ II rzędu, przykłady, układy RLC
111
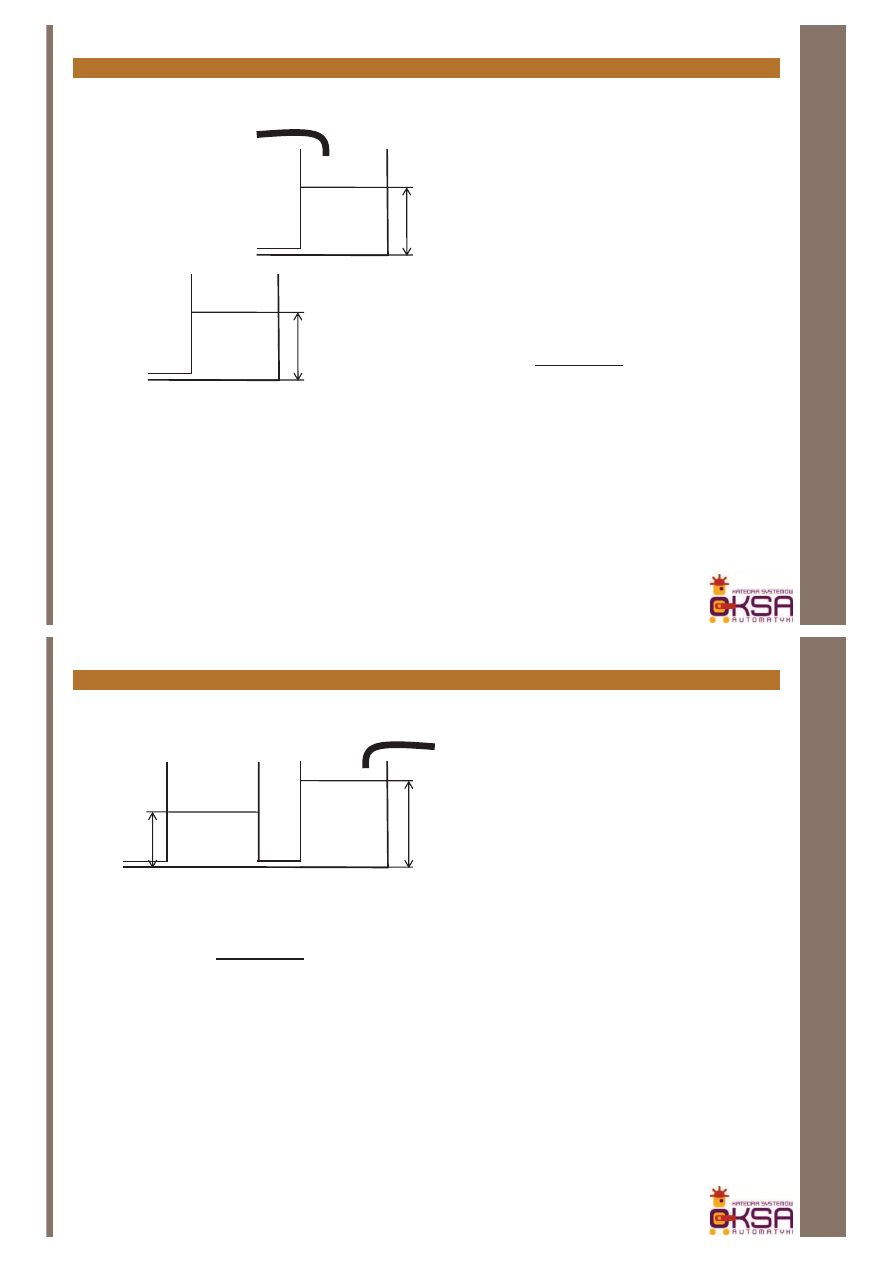
Układ LC
u
2
(t)
u
1
(t)
L
C
i
L
(t)
)
/(
1
)
/(
1
)
(
)
(
)
(
2
1
2
LC
s
LC
s
U
s
U
s
G
+
=
=
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ II rzędu, przykłady, układy hydrauliczne
112
Dwa zbiorniki
h
1
(t)
q
1
(t)
q
2
(t)
h
2
(t)
q
3
(t)
?
)
(
)
(
)
(
1
2
=
=
s
Q
s
H
s
G
Uwaga: wypływ ze zbiornika laminarny (patrz przykład dla członu inercyjnego
I rzędu). Założyć, że gęstość cieczy, powierzchnie den zbiorników oraz
współczynniki
α
i
są znane.
q
i
(t)= αρgh
i-1
(t)
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ II rzędu, przykłady, układy hydrauliczne
113
Dwa zbiorniki
h
1
(t)
q
1
(t)
q
2
(t)
h
2
(t)
q
3
(t)
?
)
(
)
(
)
(
1
2
=
=
s
Q
s
H
s
G
Uwaga: wypływ ze zbiornika laminarny (patrz przykład dla członu inercyjnego
I rzędu). Założyć, że gęstość cieczy, powierzchnie den zbiorników oraz
współczynniki
α
i
są znane.
q
i
(t)= αρgh
i-1
(t)
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – układ II rzędu, przykłady, układy mechaniczne
114
Układ mechaniczny
f(t)
b
k
m
1
x
1
(t)
m
k
s
m
b
s
m
s
F
s
X
s
G
+
+
=
=
2
1
/
1
)
(
)
(
)
(
Inżynieria systemów dynamicznych
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
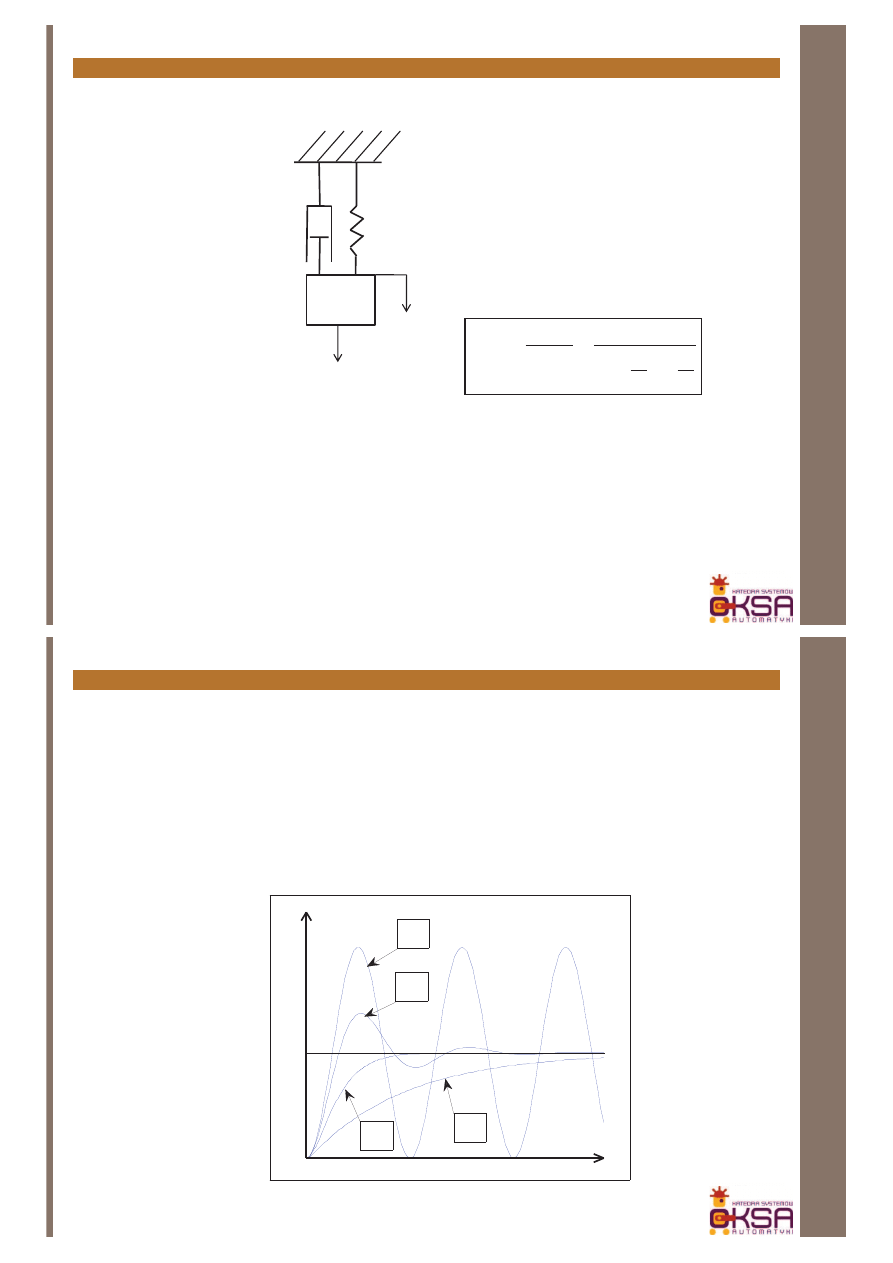
Człony układów regulacji – układ II rzędu - podsumowanie
115
Inżynieria systemów dynamicznych
t
y(t)
k
0<
z<1
z=1
z>1
z=0
Odpowiedzi układu II rzędu
ζ=0 – sinusoida (bieguny urojone sprzężone)
0<ζ<1 – tłumiona sinusoida (bieguny zespolone sprzężone) – odpowiedź niedotłumiona
ζ =1 – odpowiedź aperiodyczna krytyczna (podwójny biegun rzeczywisty)
ζ >1 – odpowiedź aperiodyczna (dwa różne bieguny rzeczywiste) –odpowiedź
przetłumiona
ζ <0 – układ niestabilny – narastające oscylacje
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – rzeczywisty człon różniczkujący
116
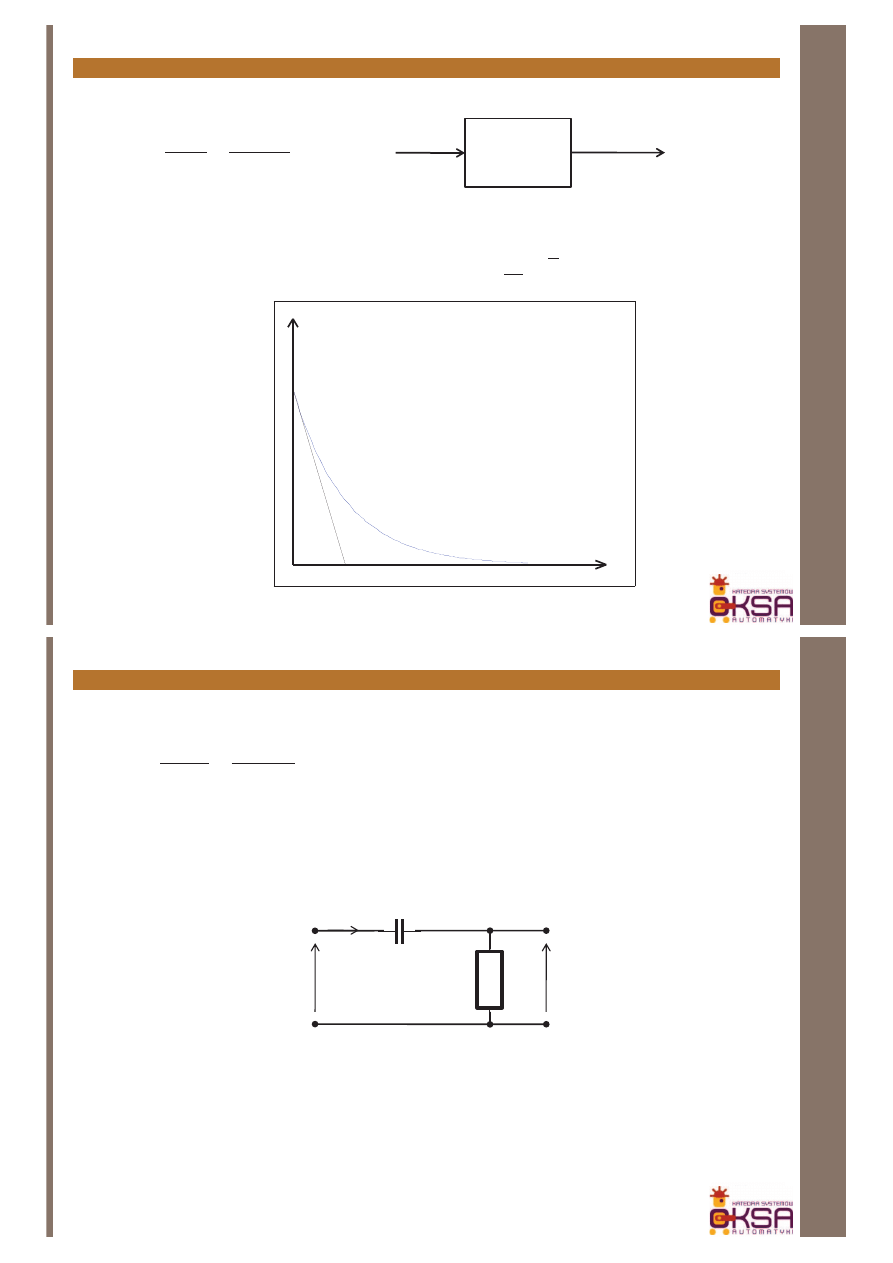
6. Rzeczywisty człon różniczkujący
y(t)
u(t)
)
1
(
)
(
)
(
)
(
+
×
=
=
Ts
s
k
s
U
s
Y
s
G
Odpowiedź skokowa:
)
(
)
(
)
(
)
(
t
e
T
k
t
y
t
t
u
T
t
1
1
×
=
Þ
=
-
Inżynieria systemów dynamicznych
t
y(t)
k/T
T
G(s)
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – rzeczywisty człon różniczkujący, przykład RC
117
Przykład: układ RC
1
)
(
)
(
)
(
1
2
+
×
=
=
RCs
s
RC
s
U
s
U
s
G
Inżynieria systemów dynamicznych
R
u
2
(t)
u
1
(t)
C
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon opóźniający
118
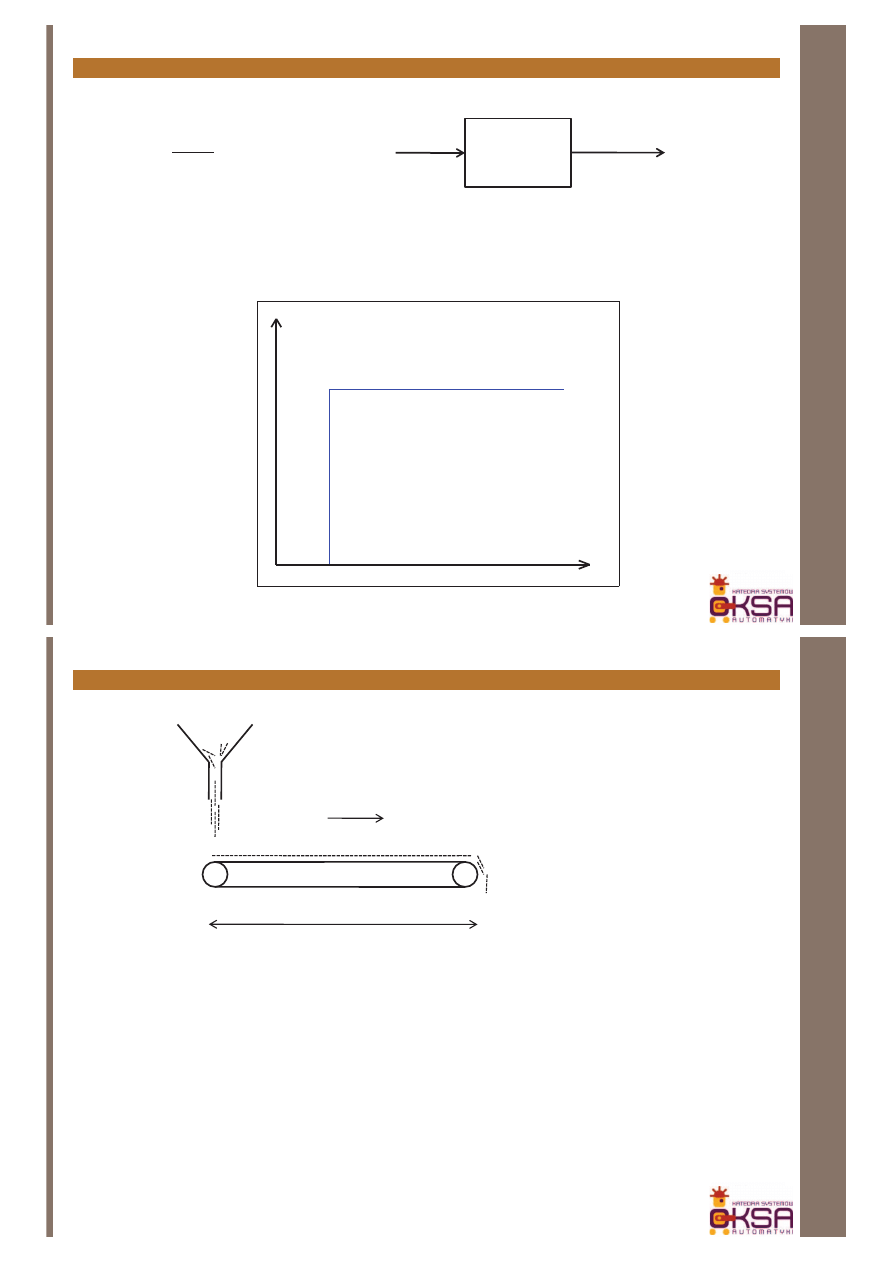
7. Człon opóźniający
y(t)
u(t)
s
e
k
s
U
s
Y
s
G
t
-
×
=
=
)
(
)
(
)
(
Odpowiedź skokowa:
)
(
)
(
)
(
)
(
t
-
×
=
Þ
=
t
k
t
y
t
t
u
1
1
Inżynieria systemów dynamicznych
G(s)
)
(
)
(
t
-
×
=
t
u
k
t
y
t
y(t)
k
t
M
E
T
O
D
Y
O
P
IS
U
U
K
Ł
A
D
Ó
W
Człony układów regulacji – człon opóźniający
119
Przykład
Inżynieria systemów dynamicznych
u(t)
y(t)=u(t-τ)
l
v
τ
=l/v
Inne przykłady: rurociąg ciepłej wody, linia długa, kanał wentylacyjny (czyli
wszędzie tam, gdzie transportowane jest medium) stąd
τ
bywa też
nazywane opóźnieniem transportowym
Wyszukiwarka
Podobne podstrony:
Wyk4 term
wyk4 3
INSTRUKCJA OBSŁUGI DEKODER SAGEM ISD 4285 PL
isd wyk3
su-wyk4, Ekonomicznie, System Ubezpieczeń
isd cwiczenia
tow-wyk4, Logistyka, rok2, towarnoznastwo, wyklady
mb-wyk4, UE Katowice FiR, marketing bankowy
af-wyk4, FIR UE Katowice, SEMESTR V, Analiza finansowa
wyk4
mark-wyk4, UE Katowice FiR, marketing
wyk4 grupa społ
wyk4-7, BO wyk 4
Iinstrukcja Sagem ISD 83
di-wyk4
WYK4, Y'=*cos(*t)
WYK4, Y'=*cos(*t)
więcej podobnych podstron