1. Trzysygnałowa integracja optomechatroniczna
Ten typ integracji polega na zastosowaniu transformacji i/lub modulacji trzech rodzajów sygnałów – optycznego,
mechanicznego i elektronicznego w jeden z tych trzech. Stosowana jest w wielu układach:
W modulacji/aktywacji:
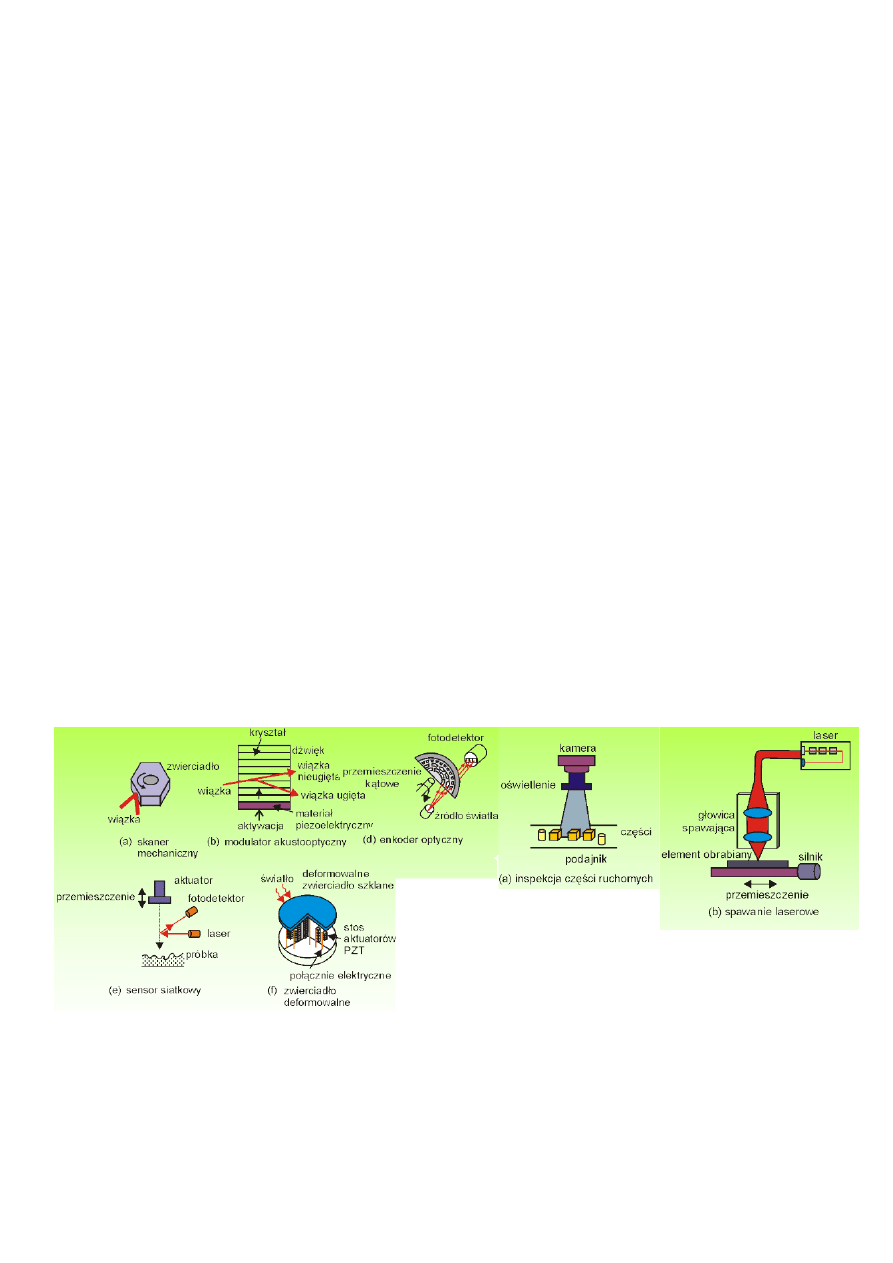
Skaner mechaniczny – wiązka światła laserowego pada na obracające się zwierciadło wielokątne
(transformacja prądu w ruch obrotowy zwierciadła plus modulacja fali świetlnej- zmiana kierunku)
Modulator akustooptyczny – materiał piezoelektryczny generuje drgania fali dźwiękowej, powodujące
miejscowe zmiany współczynnika ugięcia fali (transformacja prądu w drgania piezoelektryka plus modulacja
fali świetlnej- ugięcie fali)
Zwierciadło deformowalne – pod wpływem przyłożenia napięcia do aktuatorów PZT następuje
przemieszczenie zwierciadeł, a zarazem ugięcie fali świetlnej
W detekcji:
Enkoder optyczny – układ stosowany do badania przemieszczenia kątowego obracającego się elementu,
w zależności od odczytywanego stanu impulsu przez dwa detektory ustalane jest położenie kątowe (sygnał
elektryczny jest transformowany na mechaniczny obrót elementu, dodatkowo działa wiązka światła
laserowego. Po przejściu przez tarczę kodową wiązka pada na fotodetektor, gdzie zamieniana jest na sygnał
elektryczny określający położenie kątowe elementu)
Sensor siatkowy – sygnał elektryczny powoduje przesunięcie soczewki. Światło laserowe pada na soczewkę,
należy doprowadzić do stanu gdy wiązka zostaje zogniskowana na elemencie. Ustala się położenie elementu,
a zarazem jego kształt
Zastosowania w procesach produkcyjnych:
Spawanie laserowe – sygnał elektryczny generuje wiązkę laserową, która następnie jest ogniskowana na
elemencie spawanym (prąd -> laser, ogniskowanie przy pomocy układu soczewek regulowanych
mechanicznie)
Inspekcja części ruchomych – tworzona wiązka świetlna pada na zbiór elementów. Odbija się od nich i wraca
do detektora, gdzie sygnał zamieniany jest na elektryczny przez co można rozpoznać element.
Rodzaje integracji optomechatroniczej:
Połączenie optomechatroniczne (optyka jest nieodłączną częścią układu mechatroniki)
System mechatroniczny z wbudowanym układem optycznym (optyka niekonieczna, jednak znacząco polepsza
parametry układu)
Mechatronicznie osadzony układ optyczny (główną częścią układu jest optyka, mechatronika realizuje tylko
funkcje ruchu układem)
2. Podstawowe typy i interfejsy integracji optomechatronicznej
Rozróżnia się kilka typów integracji optomechatronicznej:
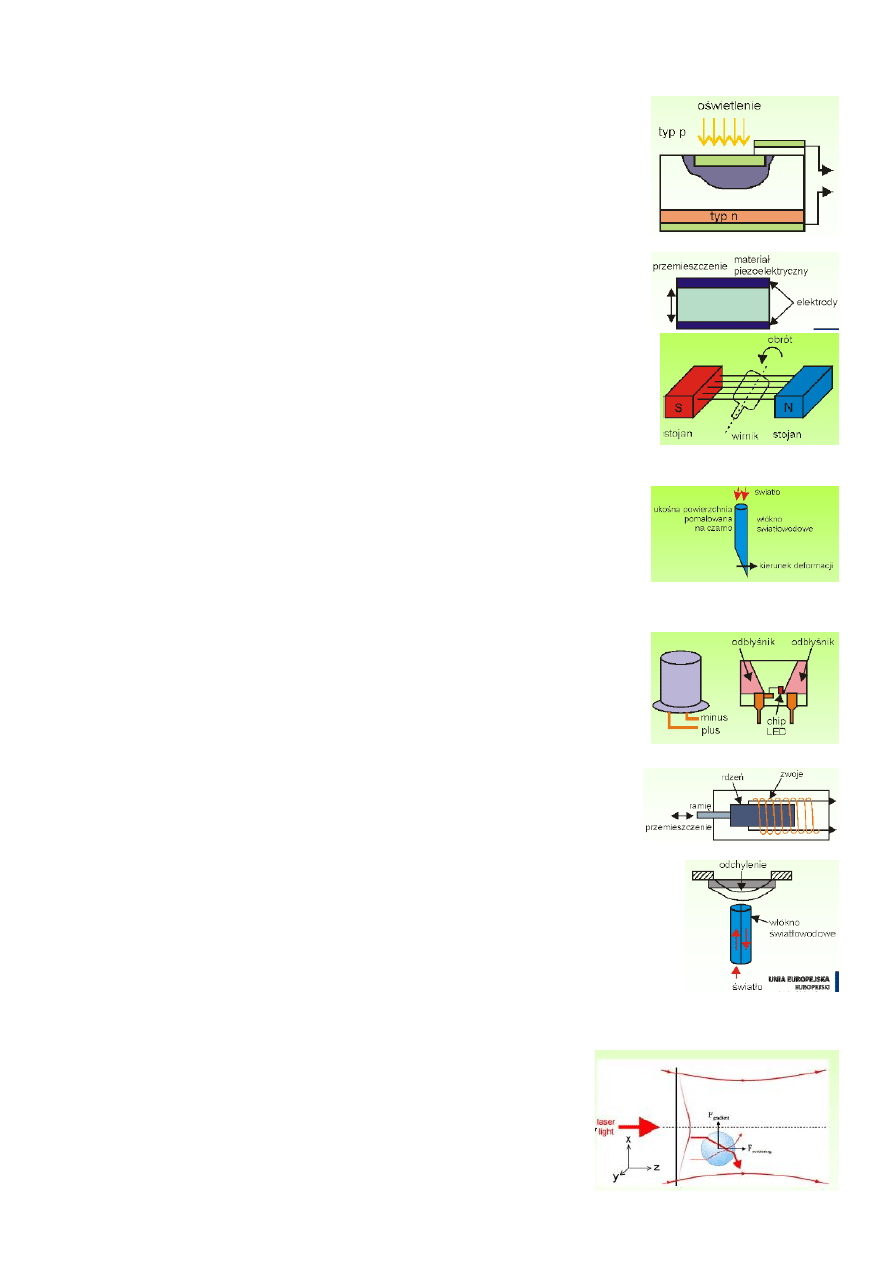
OE – optoelektroniczna (światło w prąd), np. fotodioda
Pod wpływem padającego światła na półprzewodnik fotodiody następuje wzrost ilości
par elektron-dziura, co zarazem powoduje powstanie prądu elektrycznego.
EM – elektromechaniczna (prąd w ruch), np. silnik elektryczny, efekt
piezoelektryczny [jaki?]
Efekt piezoelektryczny – po przyłożeniu napięcia do piezoelektryka, zależnie od
polaryzacji następuje skurcz lub rozkurcz elementu, efekt wykorzystywany w napędach
pełzających.
OM – optomechaniczna/optomechatroniczna (światło w ruch), np. stop
pamiętający kształt
Pod wpływem oświetlenia elementu wiązką światła, powraca on do pierwotnego
kształtu.
EO – elektrooptyczna (prąd w światło), np. dioda laserowa, dioda LED
ME – mechanoelektryczna (ruch w prąd) np. generator elektryczny
Wsunięcie w solenoid pręta powoduje powstawanie, zgodnie z regułą Lenza, siły
elektromotorycznej, której zadaniem jest powstrzymanie zmian pola magnetycznego.
MO – mechanooptyczna (ruch w światło), generator światła wzbudzany ruchem
mechanicznym
[nie jestem w stanie wyjaśnić tego zjawiska]
(pominięto transformacje sygnał w siebie- OO, EE, MM)
Ponadto występują integracje trzech sygnałów (integracja optomechatroniczna- int. OPME):
Szczypce optyczne – silnie zogniskowana wiązka lasera powoduje
powstanie siły przyciągającej lub odpychającej o wartości pN. Zdolna
jest ona przemieszczać bardzo małe obiekty dielektryczne, oraz atomy.
Pozostałe elementy int. OPME opisane zostały w poprzednim poleceniu.

3. Podstawowe role technik optomechatronicznych
a) Oświetlenie – obiekty wykazują różne charakterystyki oddziaływania na światło (absorpcyjne, transmisyjne i
odbiciowe). Zależą one od właściwości materiału, jego powierzchni i charakteru oświetlenia. Korzystając z
detektorów promieniowania można określić właściwości tych materiałów
b) Detekcja/sensoring – badanie parametrów fizycznych i geometrycznych przy zastosowaniu technik
optycznych. Techniki optyczne umożliwiają także badanie składu chemicznego obiektów (spektrometria)
c) Aktywacja – oświetlenie wpływa w sposób bezpośredni lub pośredni na parametry fizyczne materiałów
(przede wszystkim na kształt). Zjawiska te wykorzystywane są przede wszystkim dla stopów SMA (z pamięcią
kształtu, reakcja wywołana jest zmianą temperatury na skutek działania oświetlenia) oraz PZT (stopy
piezoelektryczne, powstałe napięcie elektryczne jest proporcjonalne do natężenia oświetlenia, napięcie
przetwarzane jest na energię mechaniczną)
d) Magazynowanie (odczyt, zapis) danych – oświetlenie dysku optycznego może zmodyfikować współczynnik
odbicia ośrodka rejestrującego (zapis). Odczyt danych realizowany jest poprzez detekcję odbitego światła od
ośrodka rejestrującego za pomocą czujnika optycznego.
e) Transmisja danych – promieniowanie laserowe cechuje się szerokim pasmem, przez co nie jest zaburzane
sygnałem elektromagnetycznym. Ponadto promieniowanie laserowe jest w stanie przenosić dużo informacji.
Można zatem go zastosować w transmisji danych- aby to osiągnąć stosuje się światłowody bezstratne.
f) Wyświetlanie danych – urządzenia wyświetlające są matrycami pikseli, które zawierają trzy elementy
emitujące trzy podstawowe barwy (RGB). Przyłożenie odpowiedniego prądu do pikseli powoduje
wyświetlanie żądanych kolorów
g) Operacje obliczeniowe – elementy elektroniczne mają własne odpowiedniki w dziedzinie optyki. Są to m.in.
przełączniki, bramki, przerzutniki bistabilne. Korzystając z elementów optycznych będzie można zbudować
komputer optyczny
h) Zmiana właściwości materiałów – stosując światło laserowe można doprowadzić do zmiany wymiarów
elementu oraz jego parametrów fizycznych.
i) Skanowanie optyczne
j) Zdalne monitorowanie
4. Procesy optomechatroniczne
[Szersze objaśnienie poruszonych kwestii w pytaniach dotyczących szczegółów]
a) Aktywacja optomechatroniczna
Pobudzanie do określonego działania całego układu, bądź jednego z elementów układu. Rozróżnia się trzy podstawowe
grupy aktywacji OPME:
Aktuatory optyczne z aktywacją wzbudzaną optycznie – źródło światła wywołuje reakcję układu (ten segment
aktuatorów można dodatkowo podzielić na:
fotoelektryczne – natężenie światła zamieniane na prąd elektryczny przy zastosowaniu piezoelektryków bądź
półprzewodnikowych złącz p-n;
fototermiczne – zmiana energii świetlnej na energię termiczną)
Aktuatory mechatroniczne z wbudowanym zespołem optycznym – [ktokolwiek widział, ktokolwiek wie?]
Aktuatory napędzające układy optyczne lub OPME – układ optyczny jest regulowany mechanicznie sygnałem
elektrycznym (na przykład zwierciadło deformowalne opisane w poleceniu 1.)
b) Sensoring optomechatroniczny
Ten dział można podzielić na dwie sekcje:

Sensory optyczne współpracujące z zespołami mechatronicznymi – enkodery inkrementalne oraz absolutne,
interferometry homo- i heterodynowe, interferometr (etalon) Fabry-Perot
Sensory nieoptyczne zawierające elementy/zespoły optyczne [ktokolwiek widział, ktokolwiek wie?]
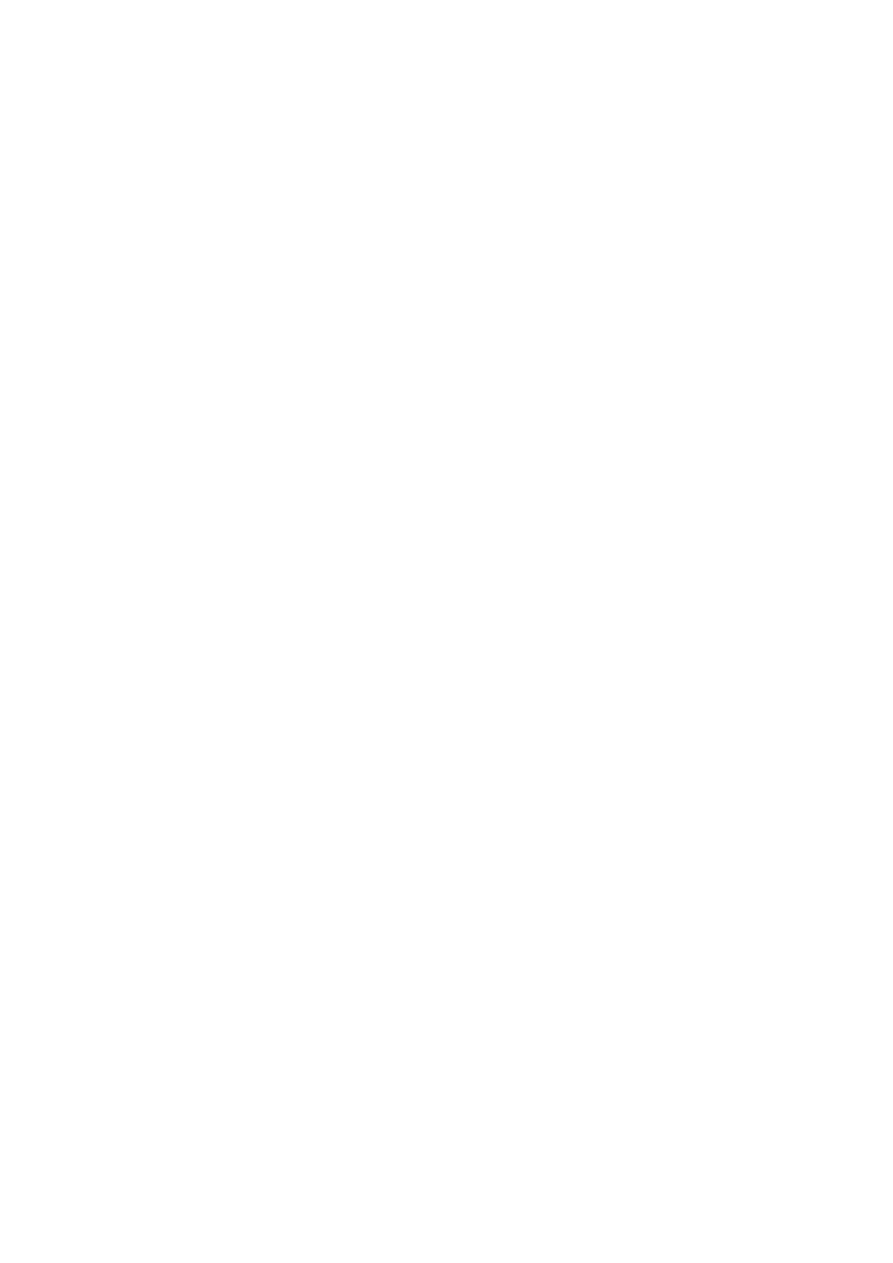
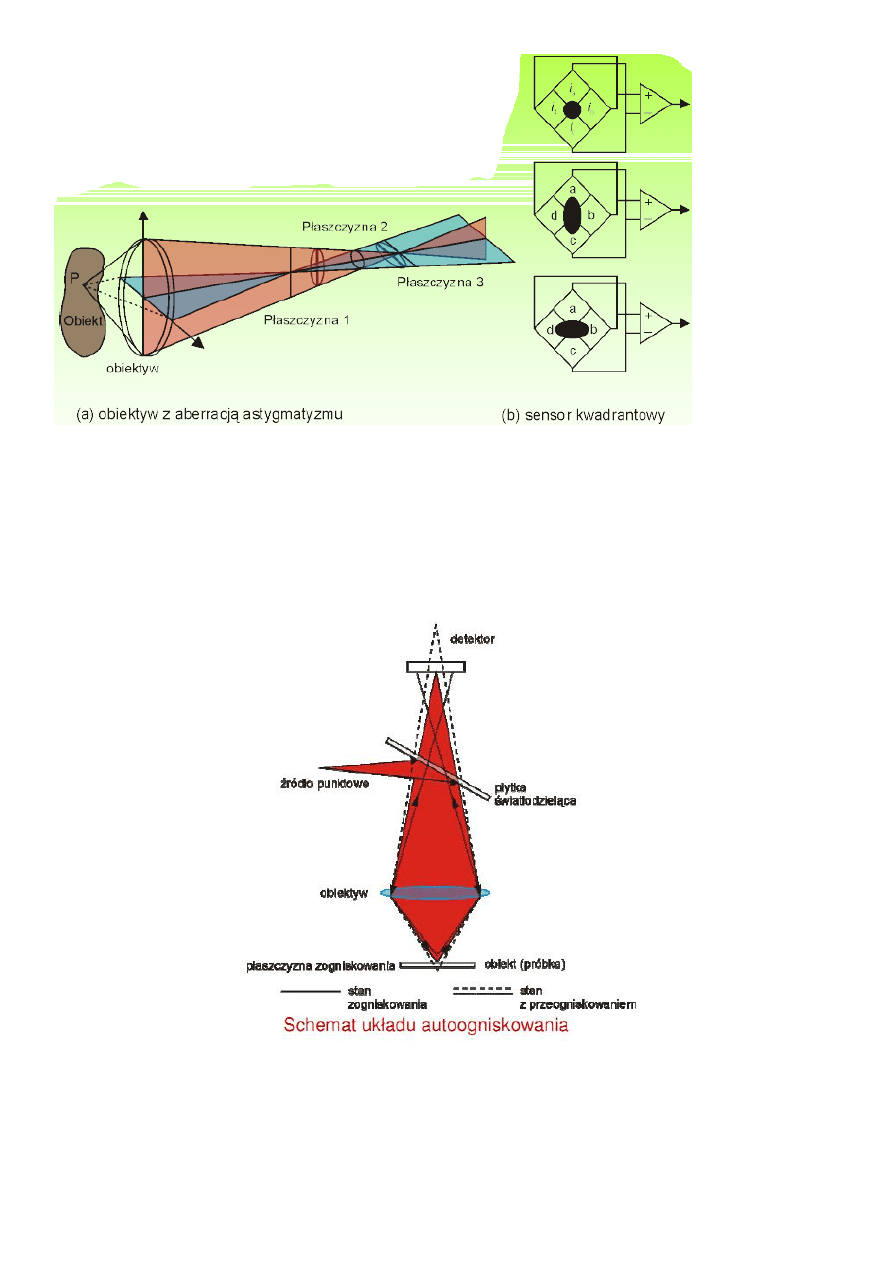
c) Autoogniskowanie obrazu przedmiotu punktowego
Sterowanie automatyczne układu optycznego, celem uzyskania możliwie jak najbardziej wyraźnego obrazu. Znajduje
zastosowania w mikroskopii sił atomowych (AFM), drukarce laserowej oraz układach odczytu/zapisu dysków
optycznych.
d) Modulacja akustooptyczna
Modyfikacja właściwości ośrodka optycznego poprzez zastosowanie drgań akustycznych. Jako rezultat można uzyskać
przesunięcie fazowe fali świetlnej, modulację jej amplitudy, filtrację światła z przestrajaniem amplitudy oraz ugięcie
wiązki proporcjonalne do częstotliwości akustycznej.
Ten typ modulacji stosowany jest w układach przetwarzania, modulacji i wyświetlania informacji, oraz modulatorze
dobroci Q rezonatora lasera
e) Skanowanie optyczne
[ktoś wie, jak to wyjaśnić?] Osiąga się to stosując poniżej przedstawione metody:
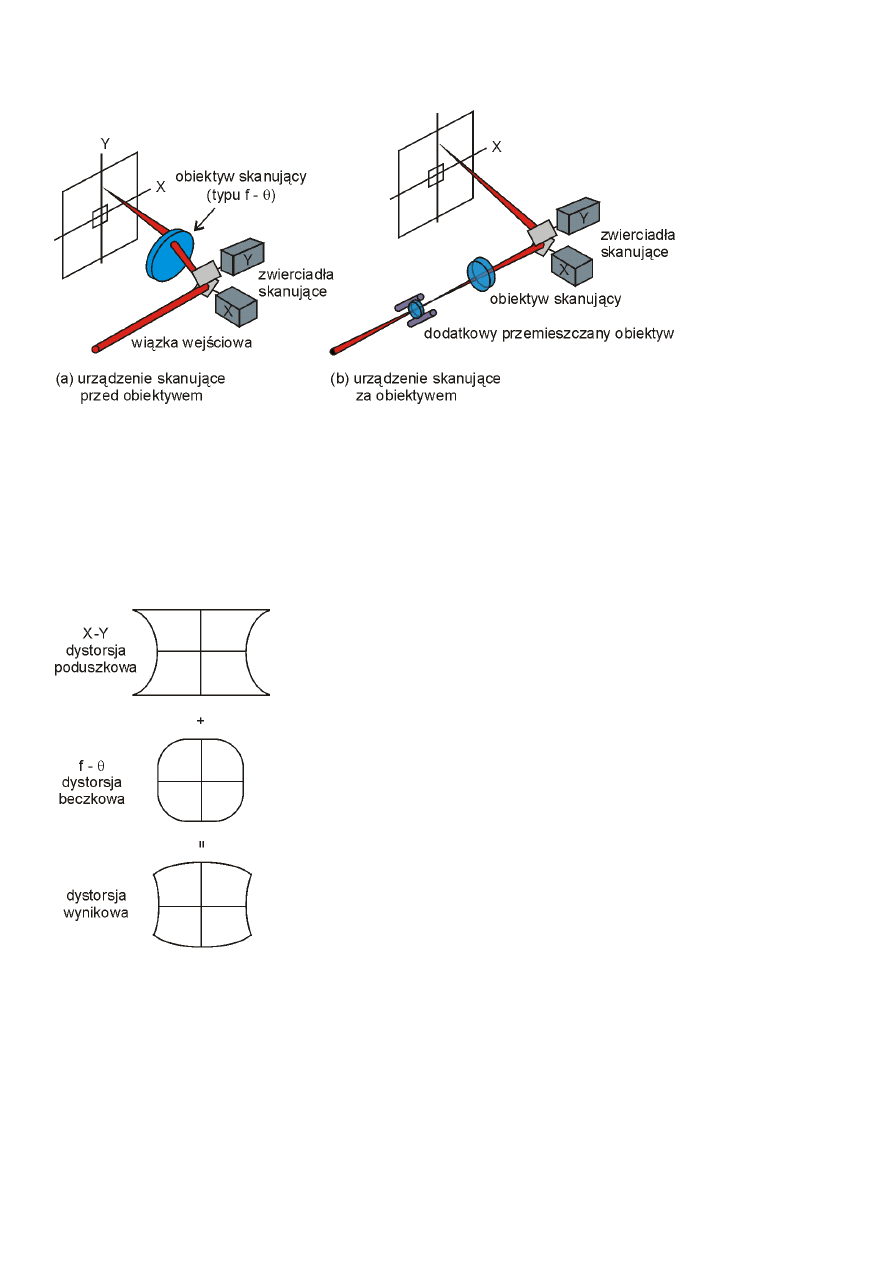
Skanowanie z przemieszczaniem układu optycznego – przemieszczenie wiązki realizowane jest poprzez
przemieszczenie liniowe i kątowe soczewki układu skanującego.
Skanowanie za pomocą układu przemiatającego umiejscowionego przed układem optycznym – do
zastosowania tej metody wymagana jest duża średnica układu optycznego, oraz zapewniona korekcja
krzywizny pola. Położenie plamki nie jest funkcją liniową kąta skanowania.
Skanowanie za pomocą układu przemiatającego umiejscowionego za układem optycznym – w tym przypadku
długość skanowania L jest liniowa w funkcji kąta skanowania. Do korekcji stosowany jest układ ogniskowania
dynamicznego.
Skanowanie przeprowadzone jest za pomocą układu galwanometru, modulatora akustooptycznego, bądź wieloboku
zwierciadlanego
f) Przełączanie optyczne
Układy optyczne umożliwiające przełączanie sygnałów optycznych (włączniki, przełączniki, konektory wielowyjściowe).
Przełączanie sygnału dokonywane jest poprzez zmianę położenia liniowego soczewki, bądź położenia kątowego
zwierciadła. W tym celu stosuje się aktuatory różnego rodzaju.
g) Sterowanie układami zmiennoogniskowymi
Funkcja ta umożliwia zmianę powiększenia obrazu bez zmiany położenia płaszczyzny obrazu. Uzyskuje się to poprzez
dodanie do układu obiektywu dodatkowych soczewek, o zmiennych położeniach. Wraz ze wzrostem ogniskowej,
wzrasta także powiększenie obrazu
h) Autoogniskowanie obrazu przedmiotu rozciągłego
Zadaniem jej jest uzyskanie ostrego obrazu obiektu nie będącego punktem. Funkcja ta znajduje zastosowanie w
metrologii przemysłowej i kontroli jakości, wizyjnym sprzężeniu zwrotnym, układach napędów optycznych oraz
mikroskopii.
[ktokolwiek wie, jaka jest różnica pomiędzy tym, a autoogniskowaniem obrazu przedmiotu punktowego???]
i) Oświetlenie
Funkcja oświetlenia w optomechatronice ma za zadanie projektowanie i regulację układów oświetlenia elementów
pomiarowych [???]. Umożliwia ona zwiększenie dokładności, niezawodności oraz optymalizację czasu pracy.
j) Wizyjne sprzężenie zwrotne
k) Transmisja sygnału optycznego
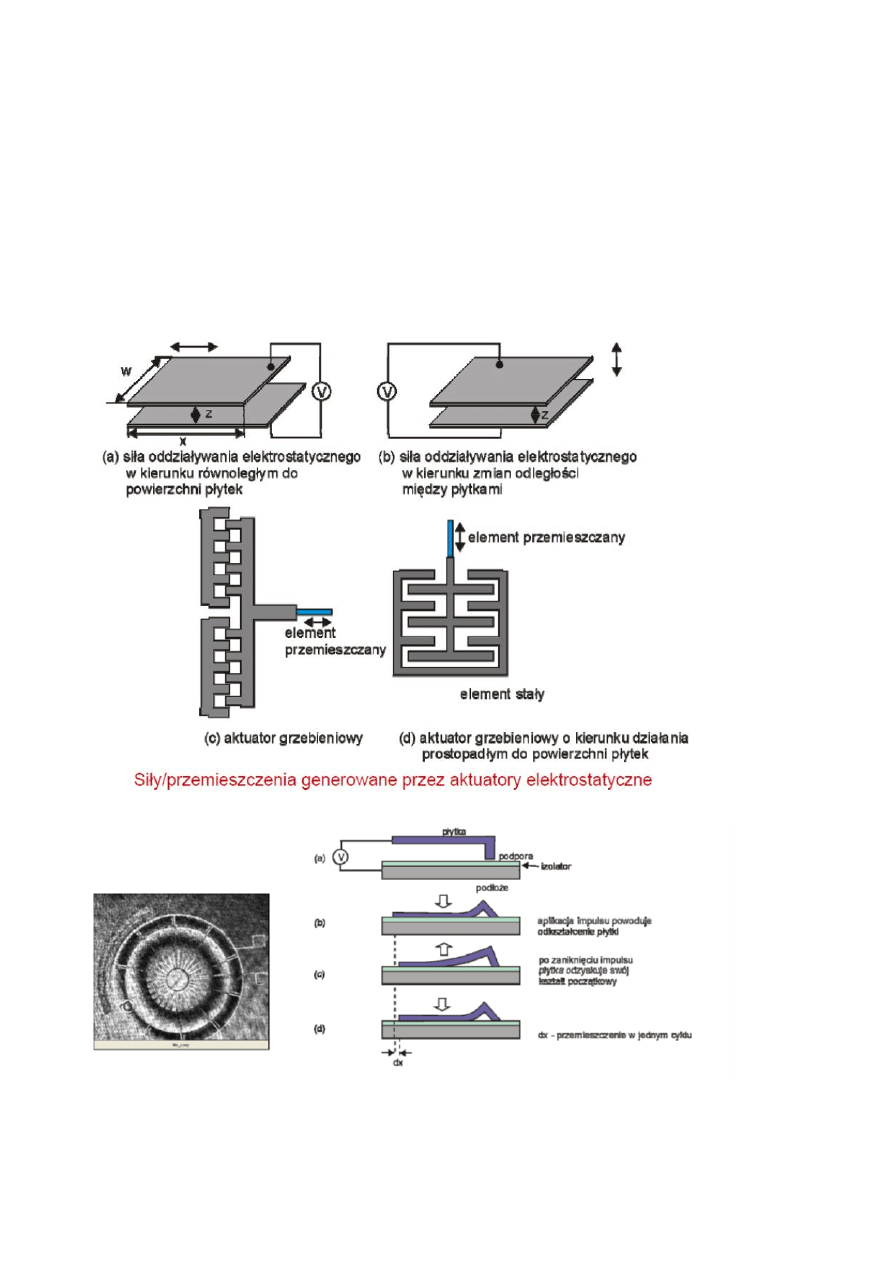
5. Napędy elektrostatyczne
Napędy elektrostatyczne znajdują zastosowanie w układach zwierciadeł. W zależności od kierunku działania siły
może następować przemieszczenie pionowe bądź poziome. Wartość przemieszczenia zależy od przyłożonego
napięcia do napędu oraz wymiarów płytek napędu.
Aktuatory tego typu występują w dwóch wariantach:
z napędem grzebieniowym – aktuator stosowany w przełącznikach optycznych (realizowane przemieszczenia
rzędu 10 μm
aktuator pełzający – umożliwiający przemieszczenie liniowe pełzające
Podłoże krzemowe, pokryte cienką warstwą izolatora tworzy strukturę pojemnościową. Przyłożenie impulsów
prostokątnych do płytki generuje cykliczne powstawanie siły elektromotorycznej, co w rezultacie prowadzi do
przemieszczenia płytki.
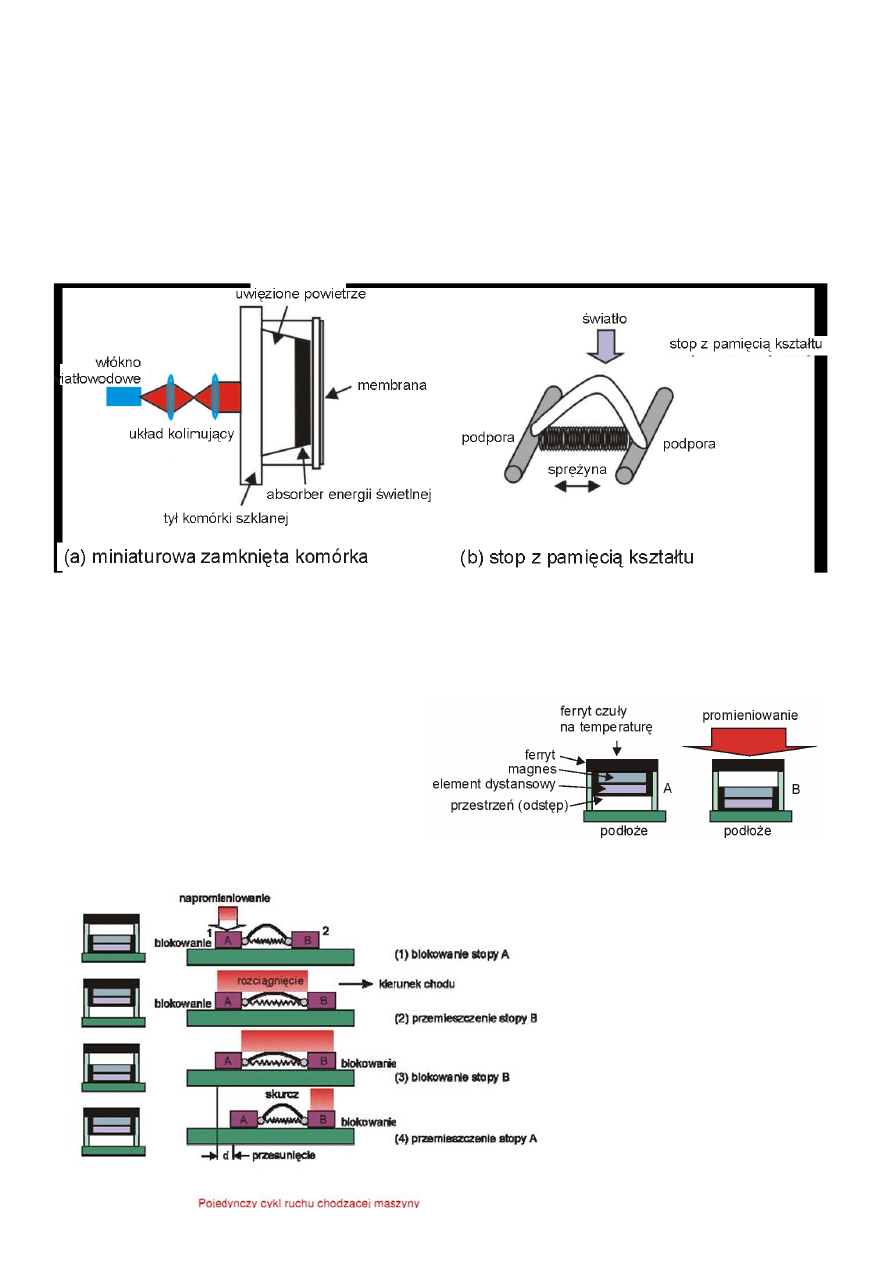
6. Aktuator fototermiczny
Energia świetlna zostaje w sposób pośredni zamieniona na aktywację mechaniczną. Dzieje się to jako rezultat
nierównomiernego napromieniowania belki kantiliwera, a zarazem nierównomiernego rozkładu temperatury na
grubości belki. W ten sposób powstaje moment gnący, który doprowadza do ugięcia mikrobelki. Gdy na mikrobelkę
działa oświetlenie impulsowe uzyskuje się wymuszone drgania kantiliwera.
Typowymi rozwiązaniami aktuatorów fototermicznych są:
Ugięcie membrany (rysunek po lewej)
Rozszerzenie ciała stałego (rysunek po prawej)
Przypadek b) przedstawia aktuator stosujący stopy z pamięcią kształtu SMA. Cechą takiego stopu jest samoczynny
powrót do pierwotnego kształtu po zadziałaniu odpowiedniego zjawiska (w tym przypadku nagrzania pod wpływem
promieniowania świetlnego). Działanie układu kroczącego ukazuje poniższy schemat:
W stanie działania promieniowania świetlnego
następuje zablokowanie mechanizmu stopy, przez co
nie następuje zmiana położenia, a zarazem następuje
prostowanie się stopu z pamięcią kształtu –
następuje ruch pełzający. Po jej wyłączeniu następuje
zwolnienie stopy.
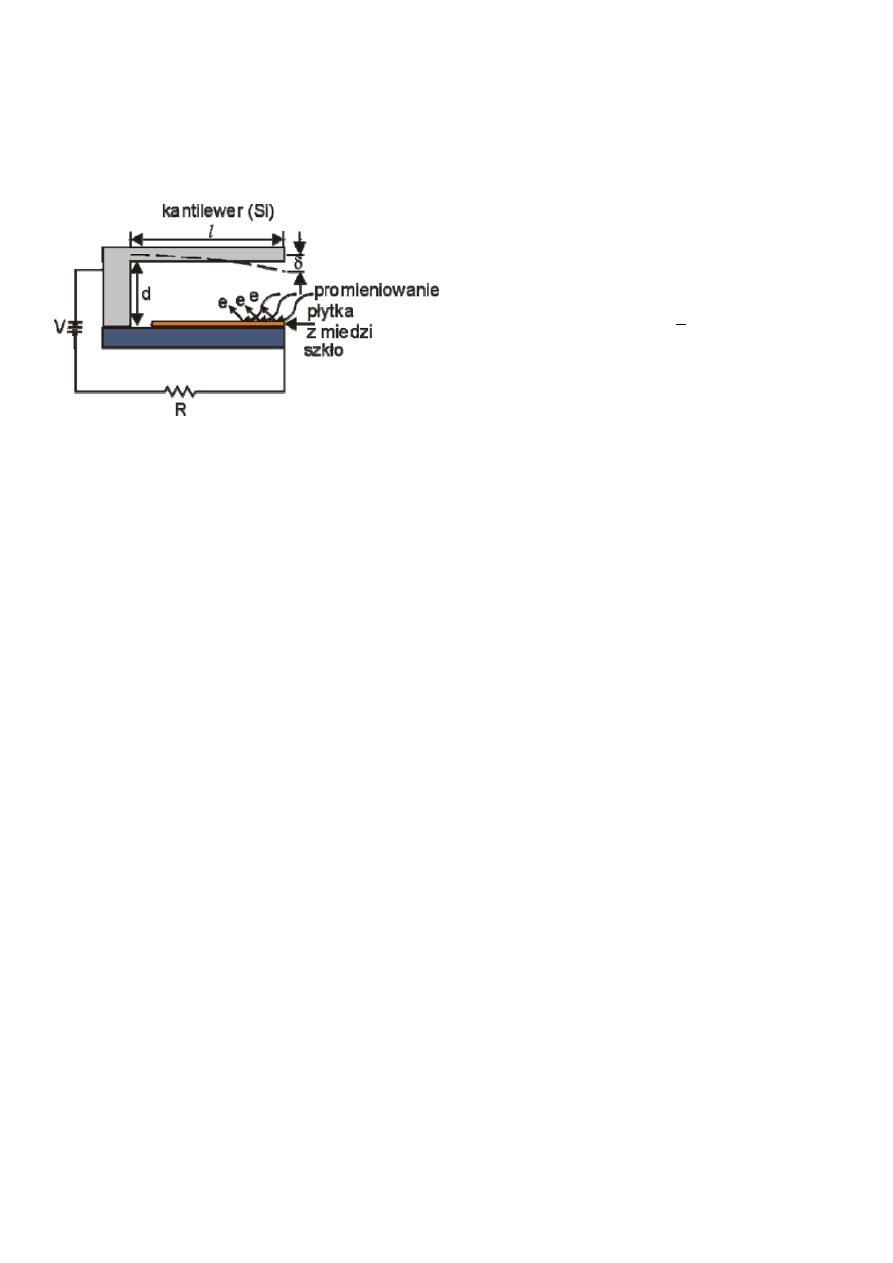
7. Krzemowy aktuator pojemnościowy
[straciłem wiarę w dotychczasowe opracowania z OMC… wszędzie to samo, wszędzie kopiuj-wklej… ]
Jest jednym z rodzajów aktuatorów. Wykorzystuje elektrony generowane przez fotony. Zmiana ładunku
zmagazynowanego w kondensatorze wywołuje zmianę ciśnienia elektrostatycznego oddziaływującą na krzemową
belkę kantilewera. W tym aktuatorze nie wykorzystywane są efekty piezoelektryczne ani termiczne.
Przedstawiony obok układ aktuatora w postaci
kondensatora płaskiego zbudowany jest z krzemowego
kantilewera oraz płytki miedzianej na izolatorze (szkle).
Pojemność tego kondensatora można ustalić ze wzoru:
𝐶
0
= 𝜀
0
𝜀
𝑟
𝐴
𝑑
gdzie A jest polem powierzchni wewnętrznej strony
kantiliwera.
Po przyłożeniu do okładek kondensatora napięcia 𝑈
0
uzyskuje się ładunek o wartości 𝑞 = 𝐶
0
∙ 𝑈
0
.
Ten zmagazynowany ładunek po przyłożeniu napięcia U do aktuatora spowoduje przemieszczenie swobodnego końca
kantilewera o wartość 𝛿 = 𝑘
𝑞
∙ 𝑞
2
, gdzie 𝑘
𝑞
jest stałą związaną z wymiarami i materiałem mikrobelki.
[tego nie było w żadnym opracowaniu, a jest istotą tematu!!!]
8. Kondensatorowy aktywator pojemnościowy
[to samo co w pytaniu 7.? ktokolwiek widział, ktokolwiek wie…]
9. Metody skanowania i ich charaktrystyka
Występują trzy rodzaje metod skanowania:
za pomocą przemieszczania układu optycznego - przemieszczenie wiązki realizowane jest poprzez
przemieszczenie liniowe i kątowe soczewki układu skanującego.
za pomocą elementu przemiatającego umieszczonego przed układem optycznym - do zastosowania tej
metody wymagana jest duża średnica układu optycznego, oraz zapewniona korekcja krzywizny pola. Położenie
plamki nie jest funkcją liniową kąta skanowania.
za pomocą elementu przemiatającego umieszczonego za układem optycznym - w tym przypadku długość
skanowania L jest liniowa w funkcji kąta skanowania. Do korekcji stosowany jest układ ogniskowania
dynamicznego.
Skanowanie realizuje się za pomocą układu akustooptycznego, układu galwanometrycznego bądź zwierciadlanego
wieloboku.
Skanowanie układem galwanometru:
Wiązka świetlna odchylana jest za pomocą pary aktywowanych zwierciadeł obracanych według dwóch osi. W układach
tych zmieniane jest położenie układu skanującego, który może znajdować się przed lub za soczewką.
W przypadku układu przemiatającego przed obiektywem, za zwierciadłami skanującymi umiejscawia się obiektyw z
płaskim polem.
Drugi typ (przemiatanie za obiektywem) korzysta z obiektywu zbudowanego z dodatniej soczewki toroidalnej oraz
ujemnej soczewki cylindrycznej- w efekcie otrzymywana jest quasi-płaska powierzchnia skanowania. Ten typ można
dodatkowo podzielić na dwa podtypy:
układ obiektywu ze stałą powierzchnią zogniskowania
układ obiektywu z ogniskowaniem dynamicznym
Problemem skanerów z elementem przemiatającym (zarówno przed, jak i za
układem optycznym) jest dystorsja będąca połączeniem dystorsji beczkowej i
poduszkowej. Wymagana jest zatem kompensacja analogowa lub cyfrowa.
Skaner ze zwierciadłem wielościennym:
Zespół skanera znajduje się na wałku silnika. Umożliwia to pracę przy dużych prędkościach, z drugiej strony znacząco
wpływa na czas życia urządzenia.
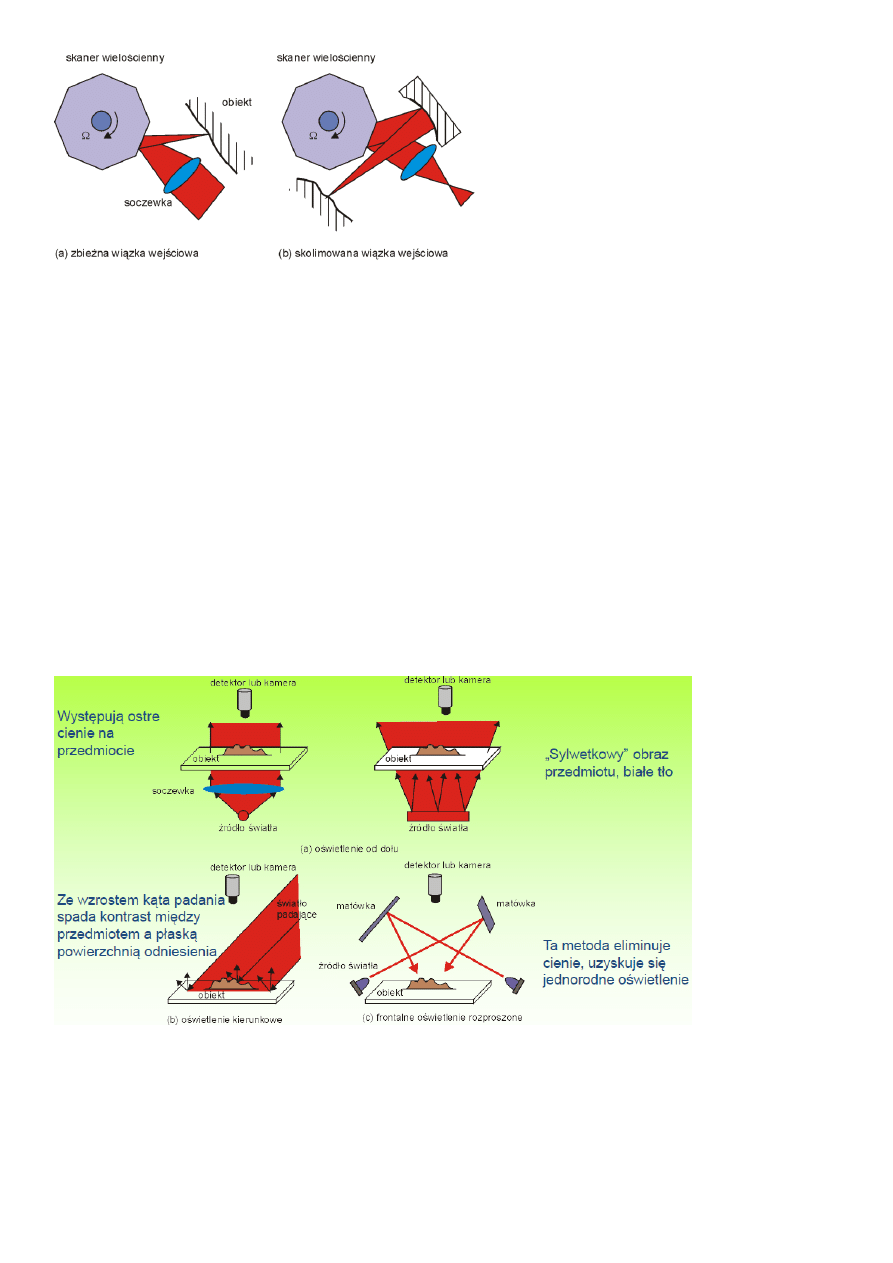
Stosowanie skanera ze skolimowaną wiązką wejściową skutkuje wykorzystywaniem całej powierzchni zwierciadeł
(poprawa działania układu)
Zaletą tego układu jest lepsza rozdzielczość oraz minimalizacja modulacji kąta skanowania wiązki.
10. Oświetlenie obiektów, sterowanie oświetleniem
Układ oświetlający powinien być dostosowany do oświetlanego układu. Układ powinien być dostosowywalny do
warunków pomiaru. Odpowiednie oświetlenie wpływa na optymalizację czasu pracy i zwiększenie jej dokładności.
Rodzaje oświetlenia:
od dołu
kierunkowe
frontalne, rozproszone
pierścieniowe
niespolaryzowane
w ciemnym polu
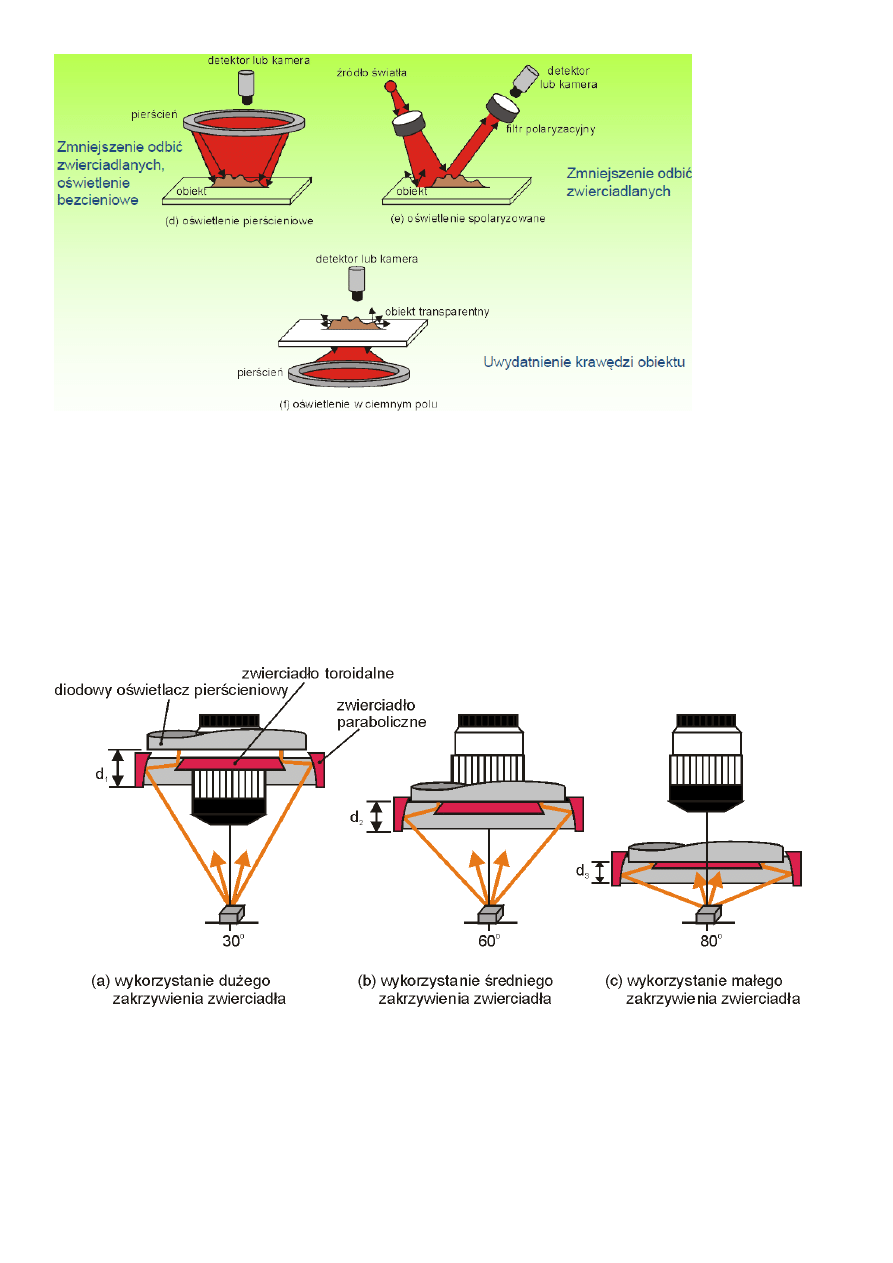
Jedną z metod regulacji oświetlenia jest zastosowanie oświetlaczy pierścieniowych. Włączając lub wyłączając
odpowiednie warstwy diód LED można regulować kierunkiem oświetlenia. Dodatkowo można zastosować stosowne
szkła rozpraszające, które wpływają na natężenie padającego oświetlenia.
Kąty padania wiązek świetlnych mają ogromny wpływ na uzyskiwanie obrazów dobrej jakości.
Inną metodą regulacji kąta padania wiązek światła jest stosowanie układów oświetlenia wykorzystujących układ
zwierciadła parabolicznego i toroidalnego. Wzajemne położenie obu tych zwierciadeł wpływa na miejsce padania
wiązki świetlnej na zwierciadło paraboliczne (duże/małe zakrzywienie), a zarazem na kąt oświetlenia (małe
zakrzywienie zwierciadła parabolicznego zwiększa kąt padania wiązki oświetlającej)
[Stan mojej części- opracowane do 14 pytania włącznie]
Autoogniskowanie obrazu przedmiotu punktowego
40-49
Automatyczne ogniskowanie wiązki umożliwia uzyskiwanie ostrych obrazów przedmiotu.
Obrazowanie konfokalne
– punktowe źródla światła jest zawsze zogniskowane w „punkcie” wewnątrz grubej
próbki – trójwymiarowe obrazowanie 3D ze skanowaniem.
Przykłady zastosowań:
Mikroskopia sił atomowych (ang. AFM – Atomic Force Microscopy);
Sterowanie głowicą dysku optycznego
Drukarka laserowa
Zespoły składowe systemu autoogniskowania:
Otyka
Układ sprzężenia zwrotnego (sterowanie poosiowym położeniem optyki)
Sensor (rejestracja obrazu i wyznaczenie przeogniskowania)
Autoogniskowanie obrazu przedmiotu rozciągłego
96-109
Slajdy Zespoły funkcjonalne 156-170
Otrzymywanie ostrego obrazu ma podstawowe znaczenie w takich zastosowaniach jak:
Metrologia geometryczna wyrobów przemysłowych
Kontrola
Śledzenie obiektów
Wizyjne sprzężenie zwrotne
Obrazowanie w mikroskopii, głowicach dysków optycznych, itp.
Przykłady zastosowań:
- elektroniczne kamery z automatycznym ogniskowaniem
- obrazowanie mikroskopowe z odpowiednim oświetleniem w celu uzyskania ostrego, odpornego na szum i
szybkiego obrazowania
Wszystkie zastosowania związane są z dokładnym pozycjonowaniem albo obiektywu obrazującego albo detektora,
lub obydwu zespołów. Sterowanie położeniem jest realizowane za pomocą serwoaktuatorów (serwomotorów,
silników ultradźwiękowych, piezoaktuatorów)
22. samoogniskowanie – takigo terminu nie znalazłem nigdzie poza słowniekiem, który odności się do
samoogniskowania światła, ale podejrzewam że może chodzić o autoogniskowanie patrz 21.
23.
Schemat metody detekcji aberracji astygmatyzmu wiązki Niech i
a
, i
b
, i
c
i i
d
oznaczają wartości sygnałów z czterech
części fotodetektora.
Przeogniskowanie Δz obiektywu można wyznaczyć z zależności
Δz = (i
a
+ i
c
) – (i
b
+ i
d
)
24) Ogniskowanie punktowe (wykorzystywane w dyskach)
Automatyczne ogniskowanie wiązki umożliwia uzyskiwanie ostrych obrazów przedmiotu.
Przykłady zastosowań autoogniskowania:
Mikroskopia sił atomowych (ang. AFM - Atomic Force Microscopy);
Sterowanie głowicą dysku optycznego;
Drukarka laserowa.
Zespoły składowe systemu autoogniskowania:
optyka;
układ sprzężenia zwrotnego (sterowanie poosiowym położeniem optyki);
sensor (rejestracja obrazu i wyznaczanie przeogniskowania)
Dwa rozwiązania konstrukcyjne:
Z filtrem otworkowym umieszczonym przed detektorem. Źródło punktowe, jego obraz pod powierzchnią lub
na powierzchni badanego obiektu oraz filtr otworkowy są wzajemnie sprzężone
Bez filtra otworkowego
25a) Sposoby pomiaru przesunięć kątowych
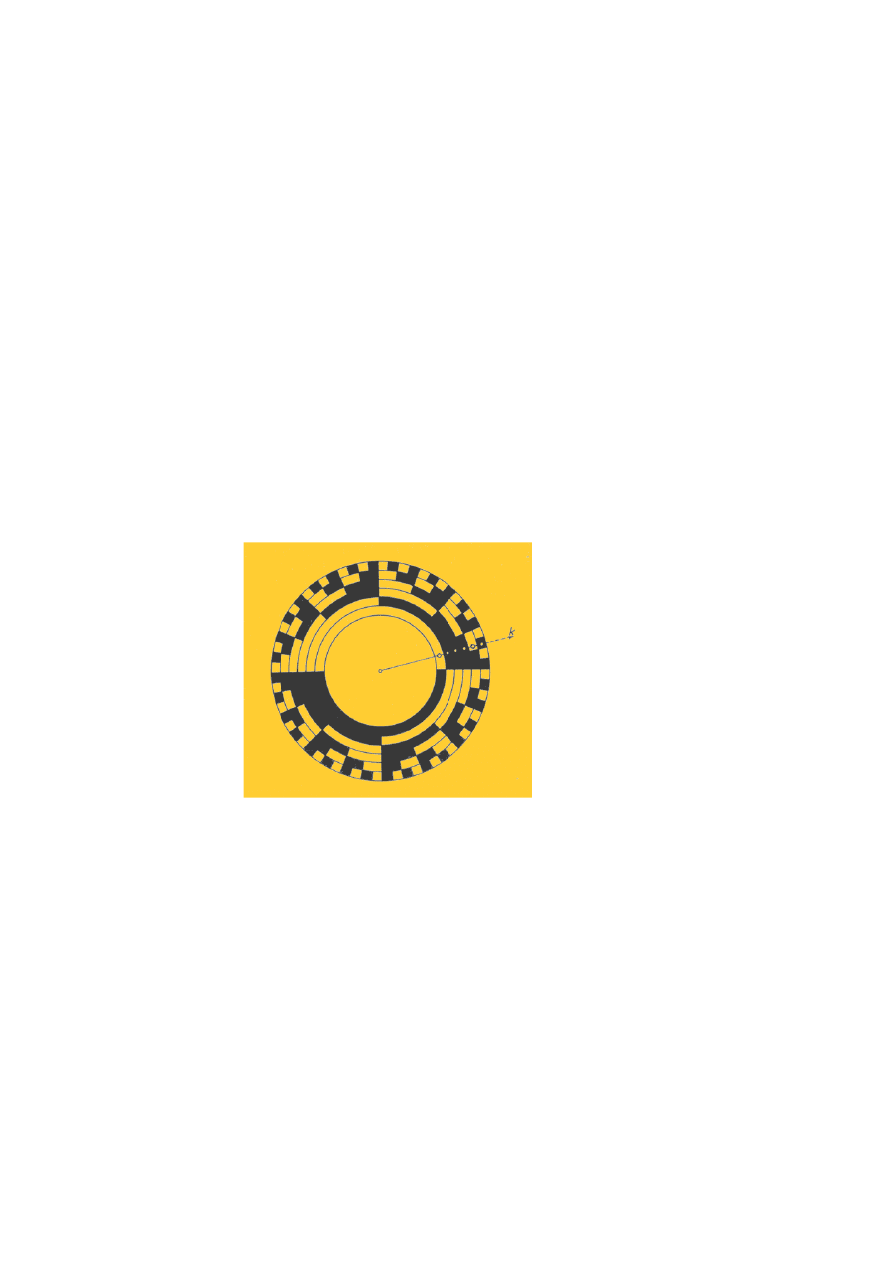
Absolutny koder optyczny ma podobną konstrukcję do urządzeń inkrementalnych za wyjątkiem tego, że
sygnał binarny lub kod odpowiada każdemu możliwemu położeniu. W celu wyznaczenia położenia, zamiast
liczyć impulsy, absolutny koder optyczny czyta system zakodowanych ścieżek. Umożliwia to zachowanie
informacji o położeniu (przy obrocie lub przemieszczeniu liniowym) nawet w przypadku wyłączenia układu
zasilania. Te właściwości stanowią o przydatności absolutnych koderów optycznych w wielu zastosowaniach z
opóźnieniem czasowym, np. w antenach do śledzenia satelitów, gdzie wolno przemieszczająca się antena
może nie być aktywna przez długi czas i sprawdzenie pozycji satelity jest wymagane tylko od czasu do czasu.
Koder inkrementalny - metoda pomiaru wykorzystuje interakcję sygnału optycznego z sygnałem
mechanicznym (przemieszczenie, ruch). Koder inkrementalny generuje każdorazowo impuls, gdy
monitorowany obiekt przemieści się o pewną ustaloną odległość. Porównanie faz sygnałów na wyjściach A i B
pozwala ustalić kierunek obrotu. Sterowanie prędkością obrotu: wyznaczana jest prędkość za pomocą
przetwornika kodu (metodą zliczania impulsów w czasie lub przez wyznaczenie czasu między sąsiednimi
impulsami), sterownik wyznacza błąd między bieżącą i pożądaną prędkością, elektronika napędu zmienia
prędkość obrotu silnika.
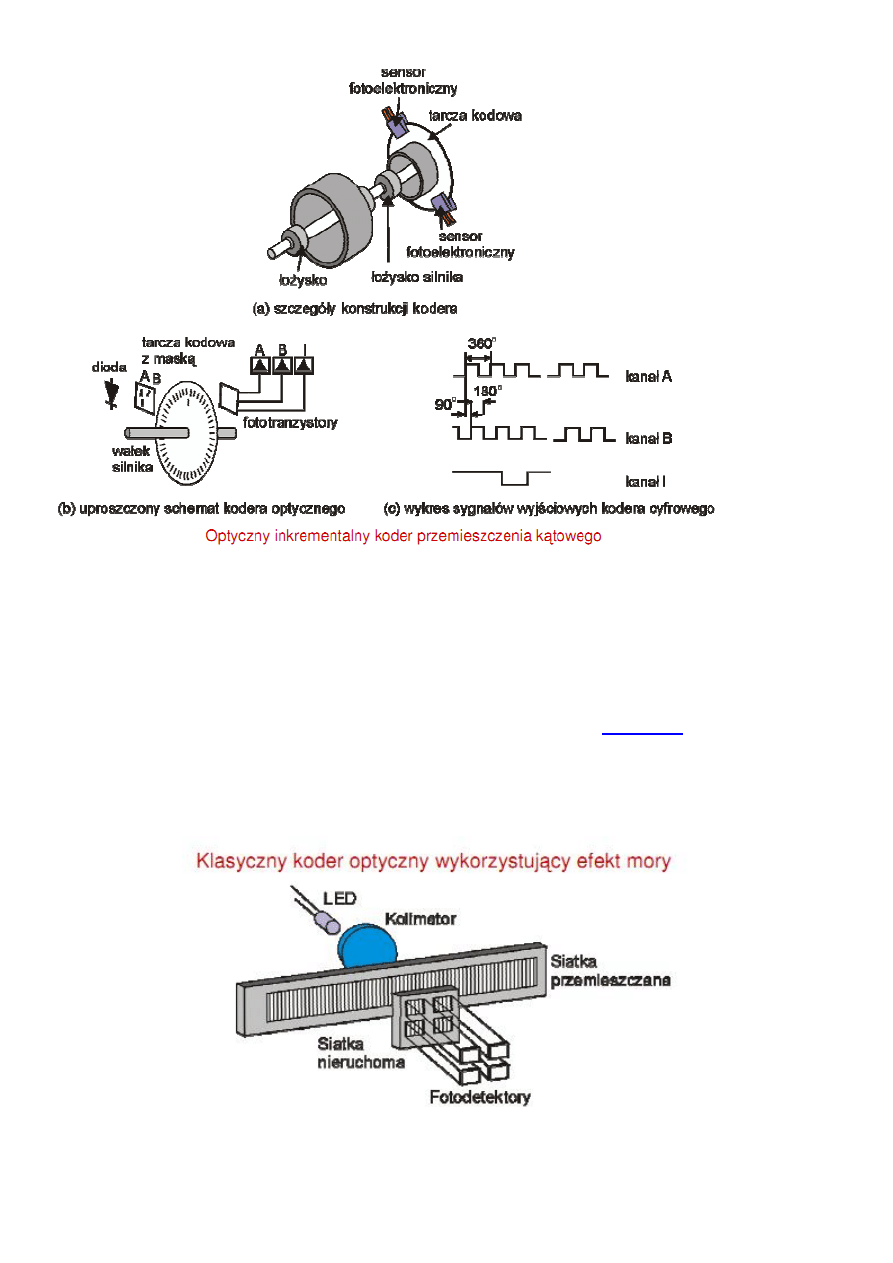
25b) Sposoby pomiaru przesunięć liniowych
Koder przemieszczenia liniowego wykorzystuje przemieszczające się wzajemnie siatki dyfrakcyjne, jego zasada
działania jest analogiczna do zasady pracy kodera przemieszczenia kątowego.
Metoda prążków mory
Prążki moiré (prążki mory) – pewien rodzaj układu prążków powstałego na skutek
dwóch siatek linii obróconych o pewien kąt lub poddanych deformacji (zniekształconych względem siebie)
Okres prążków zależy od kąta między liniami siatek i ich okresu. Przemieszczając siatkę w kierunku prostopadłym do
jej linii otrzymuje się przesuw prążków mory z odpowiednim powiększeniem.
Sygnały z fotodiod zmieniają się sinusoidalnie z przemieszczeniem. Siatka odniesienia (nieruchoma) składa się
zazwyczaj z czterech przesuniętych w fazie siatek w celu uzyskania odpowiednio przesuniętych sygnałów
sinusoidalnych. Są one wykorzystywane do wyznaczania kierunku przemieszczenia i interpolacji bazowego sygnału. Ze
zmniejszaniem okresu d siatek zaczynają odgrywać dużą rolę efekty dyfrakcyjne. Odległość z między siatkami musi być
bardzo mała (z < d
2
/λ) w celu zapewnienia dużej głębokości modulacji sygnału (dodatkowo, wartość modulacji powinna
być stała).
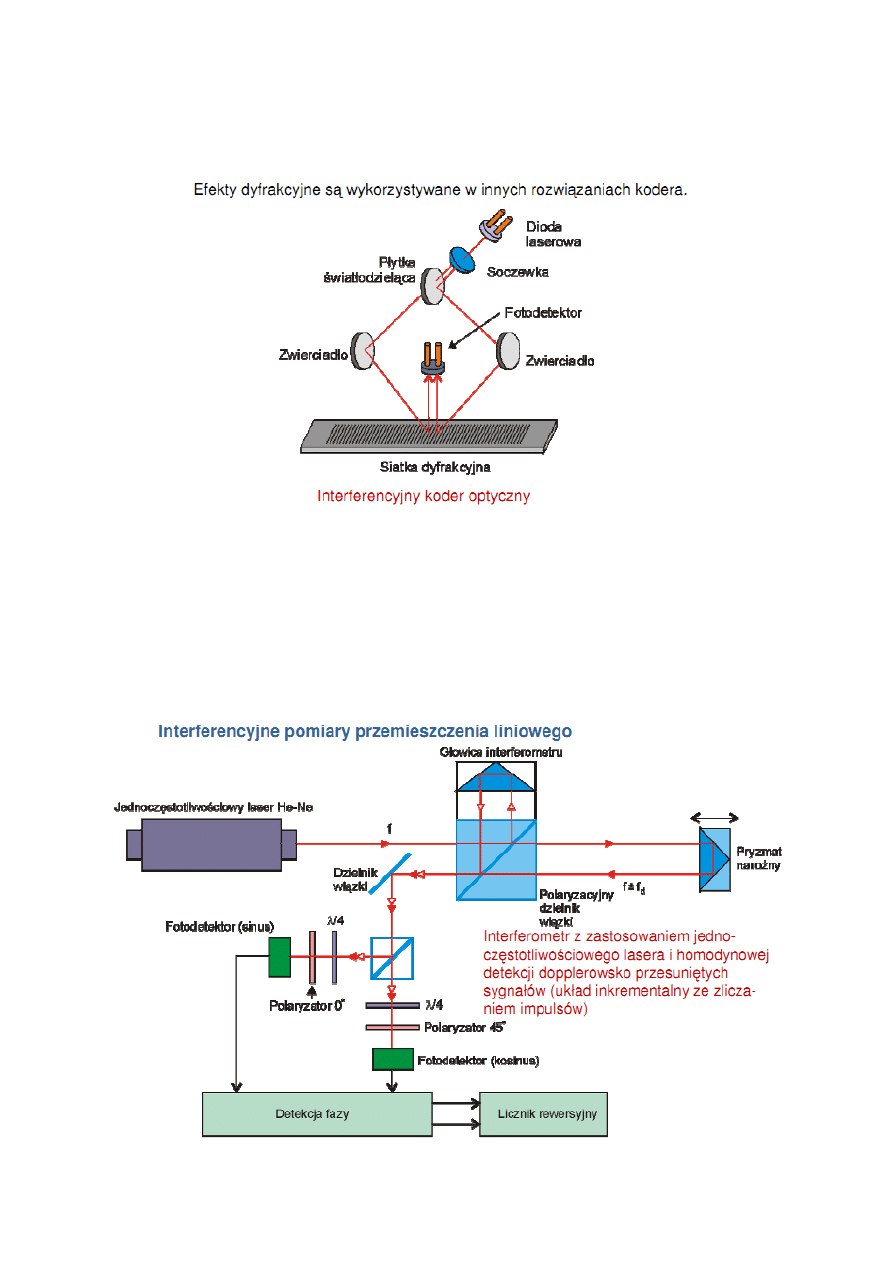
Interferencyjny koder optyczny
Fazy generowanych rzędów dyfrakcyjnych są przesunięte proporcjonalnie do liniowego przemieszczenia siatki w jej
płaszczyźnie, tzn. θN = 2π(l/d)N, gdzie l i N oznaczają, odpowiednio, przemieszczenie siatki i numer rzędu ugięcia.
Dwa sprzężone rzędy ugięcia +1 i -1 generują, w funkcji przemieszczenia, sygnał sinusoidalny o zdwojonej
częstotliwości w porównaniu z przypadkiem interferencji rzędów 0 i +1 lub 0 i -1.
Pomiary przy pomocy interferometrów
Interferometr jednoczęstotliwościowy w przedstawionej formie stosowany jest do pomiaru przemieszczenia
pryzmatu narożnego. Interferometry jednoczęstotliwościowe z detekcją homodynową zwane są także systemami
typu „A quad B” ze względu na wykorzystywaną metodę pomiaru. Różnica faz między sygnałami wyjściowymi wynosi
zawsze π/2. Interferometry tego typu można bardzo łatwo dostosować do współpracy z numerycznymi systemami
sterowania maszyn.
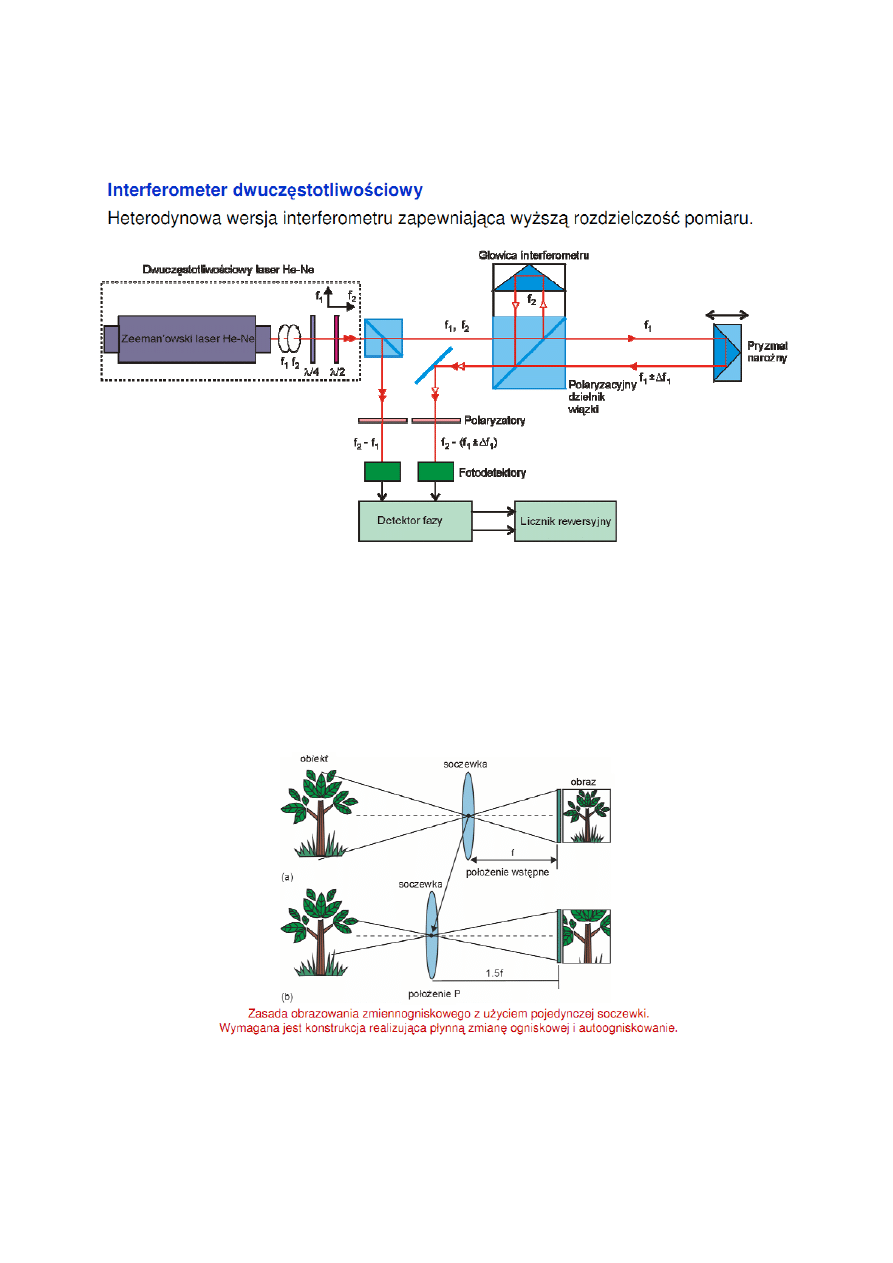
Interferometr dwuczęstotliwościowy z heterodynową detekcją dopplerowsko przesuniętych sygnałów. Różnica
częstotliwości sygnału z gałęzi odniesienia i gałęzi pomiarowej interferometru stanowi wynik pomiaru.
26) Sterowanie układami zmiennoogniskowymi
Optyka zmiennoogniskowa zapewnia zmienne powiększenie przy stałym położeniu płaszczyzny obrazu. Zmianę
ogniskowej realizuje się przez dodanie do „klasycznego” układu obrazującego dodatkowej soczewki (zespołu
soczewek). Im większa ogniskowa, tym większe uzyskiwane powiększenie.
Wymagane są dwie „soczewki” przesuwane wzajemnie poosiowo według pewnej zależności. Przemieszczanie
soczewek można sterować z zastosowaniem:
a) mechanizmu krzywkowego przemieszczającego wszystkie soczewki (napędzanego jednym silnikiem
skokowym lub serwomotorem);
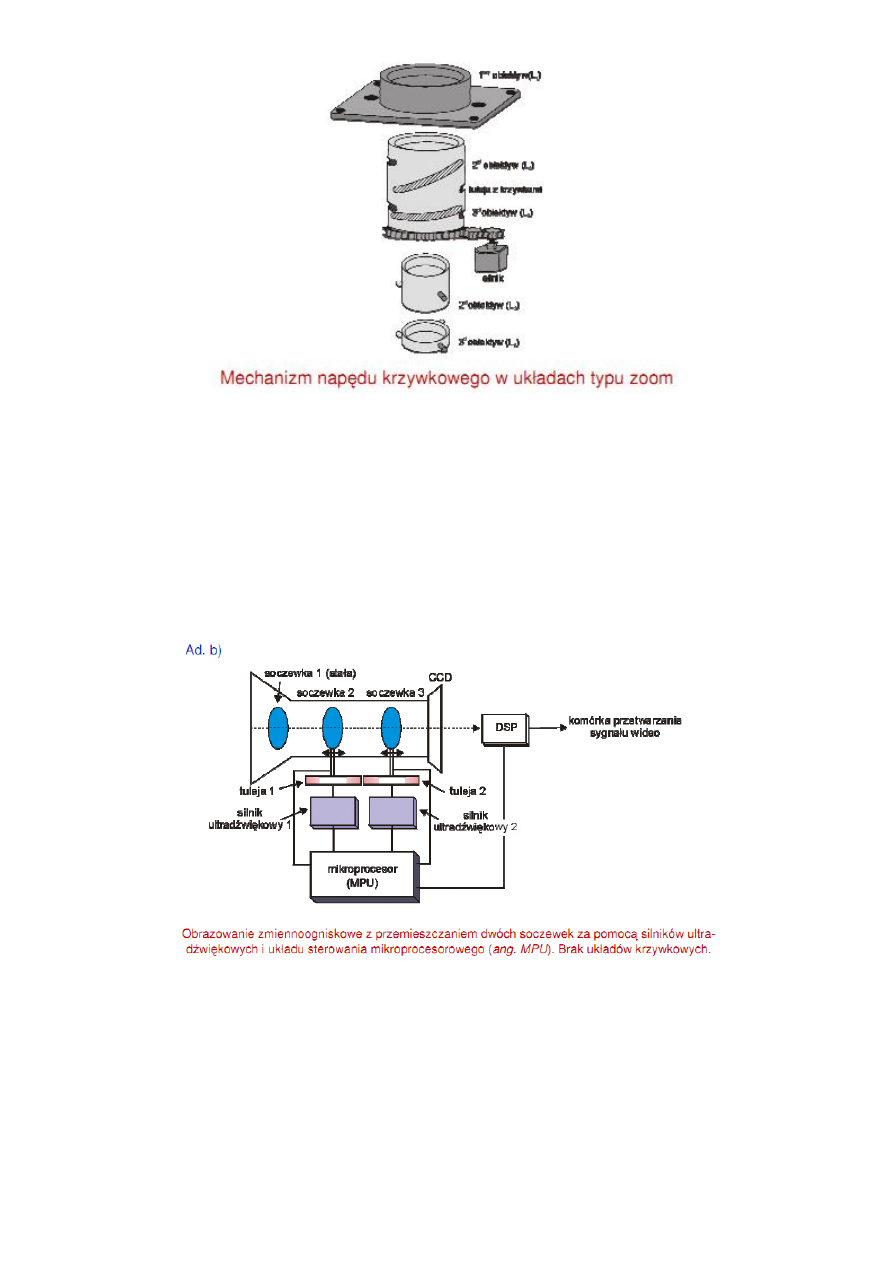
W tego typu rozwiązaniu mogą występować trudności związane z uzyskaniem wymaganej
dokładności wykonania i justowaniem układu optycznego.
b) niezależnego napędu każdej soczewki.
Każdy silnik napędza oddzielną grupę soczewek. Sensor matrycowy CCD dostarcza informację
o ostrości zogniskowania, która jest przesyłana do jednostki przetwarzania danych i mikro-
procesora. Ostrość zogniskowania reprezentuje miara zogniskowania.
27) Akustooptyka
Acousto-optics is a branch of physics that studies the interactions between sound waves and light waves, especially
the diffraction of laser light by ultrasound (or sound in general) through an ultrasonic grating.(type of diffraction
grating).
-----------------------------------------------------------------------------------------
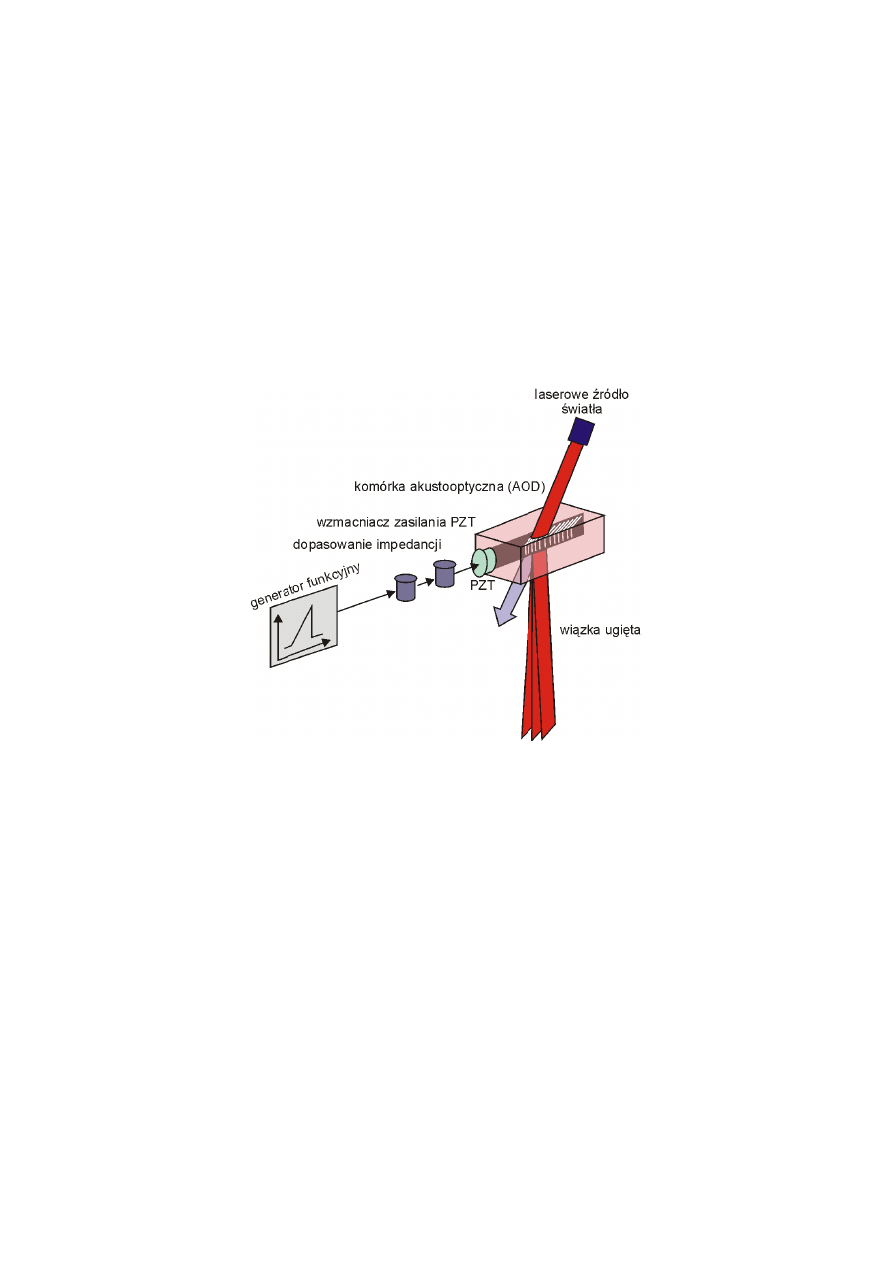
W wyniku oddziaływania wiązki światła z falą akustyczną (tworzącą okresową modulacją współczynnika załamania w
ośrodku) uzyskuje się:
Wiązkę ugiętą (proporcjonalnie do częstotliwości akustycznej);
Przesunięcie częstotliwości światła (+/- częstotliwość fali akustycznej);
Filtrację z przestrajaniem długości fali (za pomocą zmiany częstotliwości fali akustycznej);
Modulację amplitudy (intensywności) (stojąca fala ultradźwiękowa).
Zastosowania:
Optyczne przetwarzanie informacji
wyświetlanie i modulacja (przestrzenna i czasowa) koherentnych wiązek światła
akustooptyczny modulator dobroci Q rezonatora lasera (z wykorzystaniem wiązki zerowego rzędu
modulacja strat wewnątrz rezonatora – nagłe obniżenie poziomu strat daje generację impulsu
nanosekundowego o dużej mocy
Przez zmianę amplitudy i częstotliwości fali akustycznej uzyskuje się zmianę intensywności, położenia kątowego i/lub
częstotliwości ugiętej wiązki świetlnej.
28) Filtr Fabry-Perota
•
Filtr dichroiczny jest jedną z realizacji interferometru Fabry'ego-Pérota, a dokładniej jest to ściśle upakowana
sekwencja kolejno ułożonych interferometrów Fabry'ego–Pérota.
•
Filtr dichroiczny lub zwierciadło dichroiczne – bardzo precyzyjny, kolorowy element optyczny służący do
selektywnego przepuszczania światła w danym zakresie widma, a odbijania w każdym innym zakresie.
•
Filtry dichroiczne działają na zasadzie interferencji.
Etalon F-P może być użyty jako skanujący analizator spektralny (obserwacja oscyloskopowa) lub jako przestrajalny
optyczny filtr wąskopasmowy.
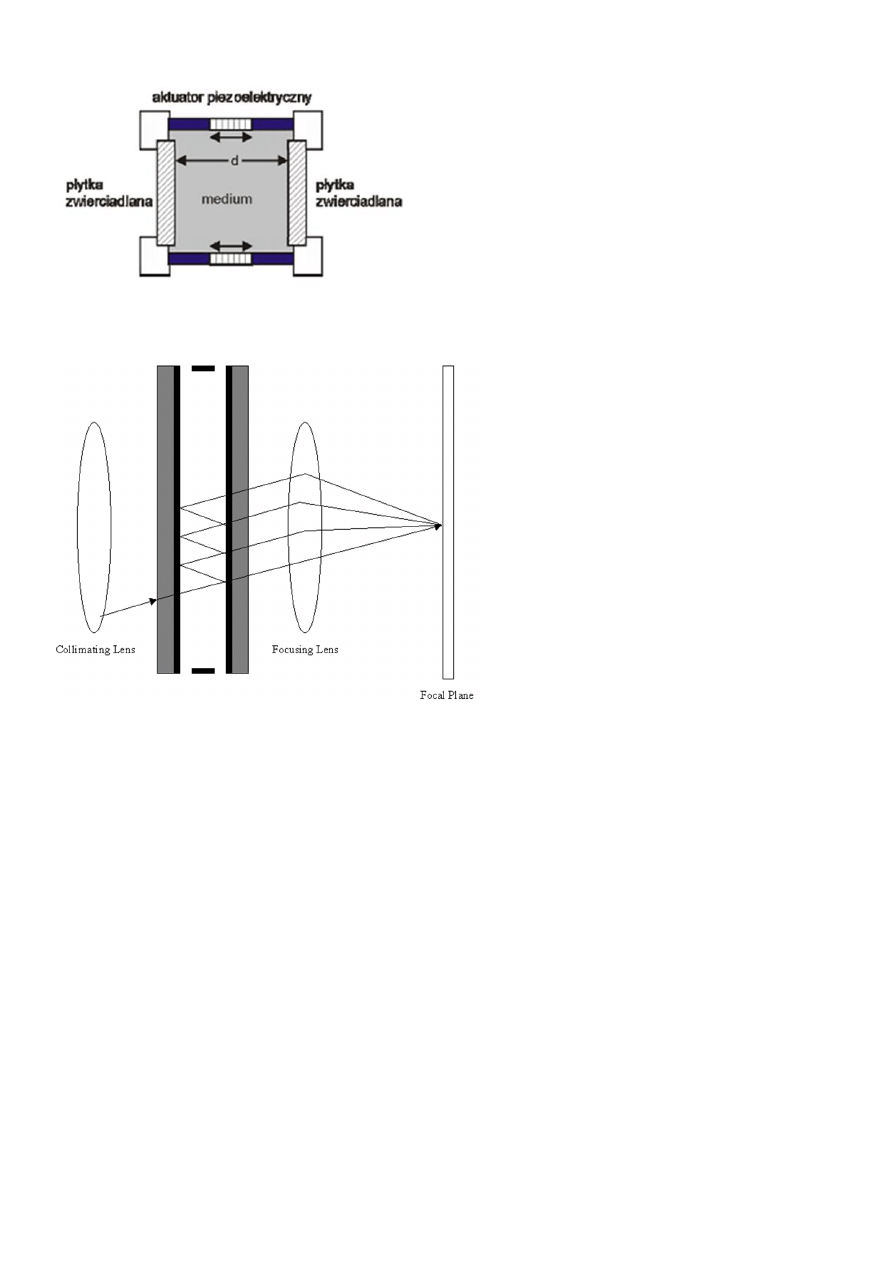
29) Etalon - Interferometr Fabry'ego-Perota
Jest zbudowany z dwóch równoległych półprzepuszczalnych płaskich zwierciadeł P1 i P2(płytek szklanych
płaskorównoległych, lekko klinowatych, jednostronnie napylanych srebrem). Płytki ustawione są równolegle,
powierzchniami zwierciadlanymi do siebie. Spójne, monochromatyczne światło ze źródła S ulega wielokrotnemu
odbiciu od zwierciadlanych powierzchni i interferuje ze sobą. Prążki interferencyjne możemy obserwować na ekranie
O. Przyrząd został opracowany przez fizyków francuskich Charlesa Fabry'ego i Alfreda Pérota i nazwany ich nazwiskami.
Budowa:
Zasada działania:
Interferometr Fabry'ego-Pérota należy do grupy interferometrów wielowiązkowych. Filtr dichroiczny jest jedną z
realizacji interferometru Fabry'ego-Pérota, a dokładniej jest to ściśle upakowana sekwencja kolejno ułożonych
interferometrów Fabry'ego–Pérota.
Zastosowanie:
jako analizator widma
Wyznaczanie długości fali promieniowania
wizualizacja modów podłużnych lasera He-Ne
jako skanujący analizator spektralny (obserwacja oscyloskopowa)
przestrajalny optyczny filtr wąskopasmowy
Wyszukiwarka
Podobne podstrony:
OMC kolos1 pigu%c5%82a6
AM2(sciaga) kolos1 id 58845 Nieznany
BSK kolos1
kolos1 logika gr 1,2
fiza kolos1
kolos1 bud ziemne
Fizyka calosc kolos1
Biologia medyczna- kolos1, biologia medyczna
Etyka w pigu│ce
kolos1
omc lab4 sprawko , OPTOMECHATRONIKA
Farmacja egzamin, Losy 1 piguki, Farmakodynamika
PE kolos1
kolos11, Leśnictwo UWM Olsztyn, Semestr I, Gleboznawstwo
SPG wyklady doc, Wrokflow WFMC OMC, Wprowadzenie
PiguÅ‚a Tabor winczorek wstep do prawoznawstawa , © „Piguła” by Rafał Lesiecki
więcej podobnych podstron