1.5 Si
ły bezwładności.
Za
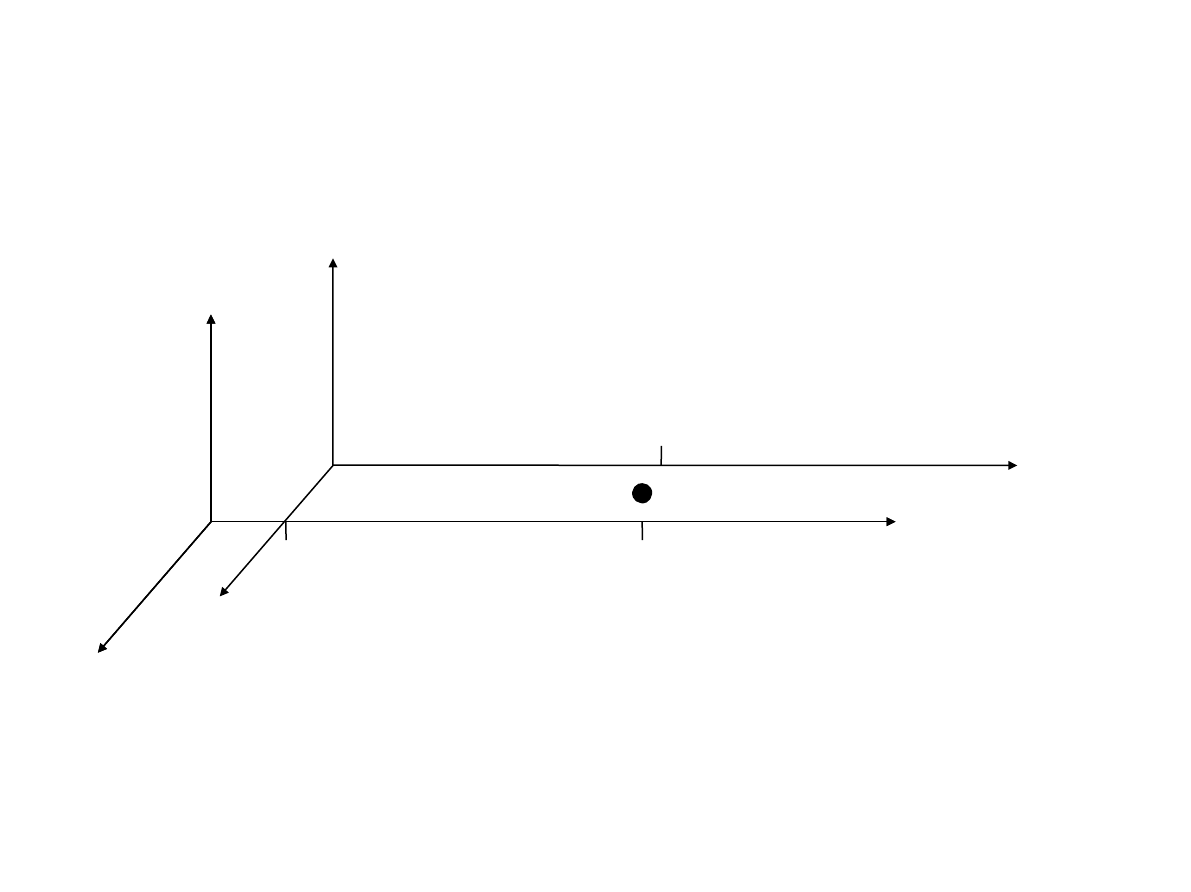
łóżmy, że obserwujemy ruch punktu materialnego A w pewnym
inercjalnym uk
ładzie odniesienia (na rysunku oznaczonym przez O).
z`
z
A
x(t)
x`(t)
x`
x
y`
y
Niech rozwa
żany punkt znajduje się pod działaniem innych ciał
materialnych, wi
ęc porusza się ruchem przyspieszonym.
O`
O
x
o
(t)
Zgodnie z drug
ą zasadą dynamiki:
F
d p
d
(m
v )
m
a .
dt
dt
(1.5.1)
Dla uproszczenia za
łóżmy, że punkt porusza się wzdłuż osi x, wtedy
warto
ść przyspieszenia można wyrazić wzorem:
d x(t)
.
| a |
a
dt
2
2
x
(1.5.2)
W
eźmy teraz pod uwagę drugi układ odniesienia O`, poruszający
si
ę względem układu O w kierunku osi x ruchem dowolnym.
W uk
ładzie O współrzędna punktu A wynosi x(t), w układzie O`
natomiast x`(t). Oznaczaj
ąc przez x
o
(t) odleg
łość początku układu
O` od pocz
ątku układu O można napisać związek:
x`(t)
x(t)
x
o
(t)
(1.5.3)
Po dwukrotnym zr
óżniczkowaniu równania (1.5.3 ) względem czasu
otrzymujemy:
x
o
(t)
,
d x`(t)
d x(t)
d
dt
2
2
dt
2
2
2
dt
2
(1.5.4)
czyli
a`
a
a
o
,
(1.5.5)
gdzie a` i a oznaczaj
ą odpowiednio przyspieszenia punktu A
wzgl
ędem układów O` i O, a
o
to przyspieszenie uk
ładu O` względem
uk
ładu O. Ze związku (1.5.5) widać, że przyspieszenie w układzie O`
nie jest w og
ólności równe przyspieszeniu w układzie O. Równość
zachodzi tylko wtedy, gdy a
o
= 0, a wi
ęc gdy przyspieszenie układu
O` wzgl
ędem układu O jest równe zero (tzn. gdy układ O` jest
uk
ładem inercjalnym). Jeżeli a
o
nie jest
równe zero, to układ O`
nazywamy nieinercjalnym. W przypadku ruchu w przestrzeni
t
rójwymiarowej wzór (1.5.5)należy zapisać w postaci wektorowej:
a`
a
a
o
(1.5.6)

Mno
żąc obie strony równania (1.5.6) przez masę m otrzymujemy:
m
a`
m
a
m
a
o
F
m
a
o
.
Animacja: WeightOfAPersonRidingInAnElevator
(1.5.7)
W uk
ładzie nieinercjalnym O` nie obowiązuje zatem pierwsza
zasada
dynamiki. Punkt materialny, na kt
óry nie działa żadna siła, nie
spoczywa, lecz porusza si
ę z przyspieszeniem:
a`
a
o
(1.5.8)
Nie obowi
ązuje w nim również druga zasada dynamiki. Iloczyn
masy i przyspieszenia nie jest r
ówny sile działającej na dana masę,
lecz sile minus wyr
ażenie m
a
o
.
Zdefiniujmy teraz
si
łę bezwładności
w nast
ępujący sposób:
F
b
m
a
o
(1.5.9)

Wz
ór (1.5.7) przyjmuje teraz postać:
m
a`
F
F
b
.
(1.5.10)
Ze wzoru (1.5.10) wynika,
że drugą zasadę można stosować w
uk
ładach nieinercjalnych, jeżeli do sił działających na punkt
materialny ze strony innych cia
ł, dodamy siłę bezwładności.
Ponadto w uk
ładzie nieinercjalnym, względem którego
przyspieszenie cia
ła jest równe zeru (
a`
0
) suma s
ił
F
dzia
łających na to ciało oraz siły bezwładności
jest
równa zeru:
F
b
Wz
ór (1.5.11) jest matematycznym zapisem tzw.
zasady d
’ Alemberta
.
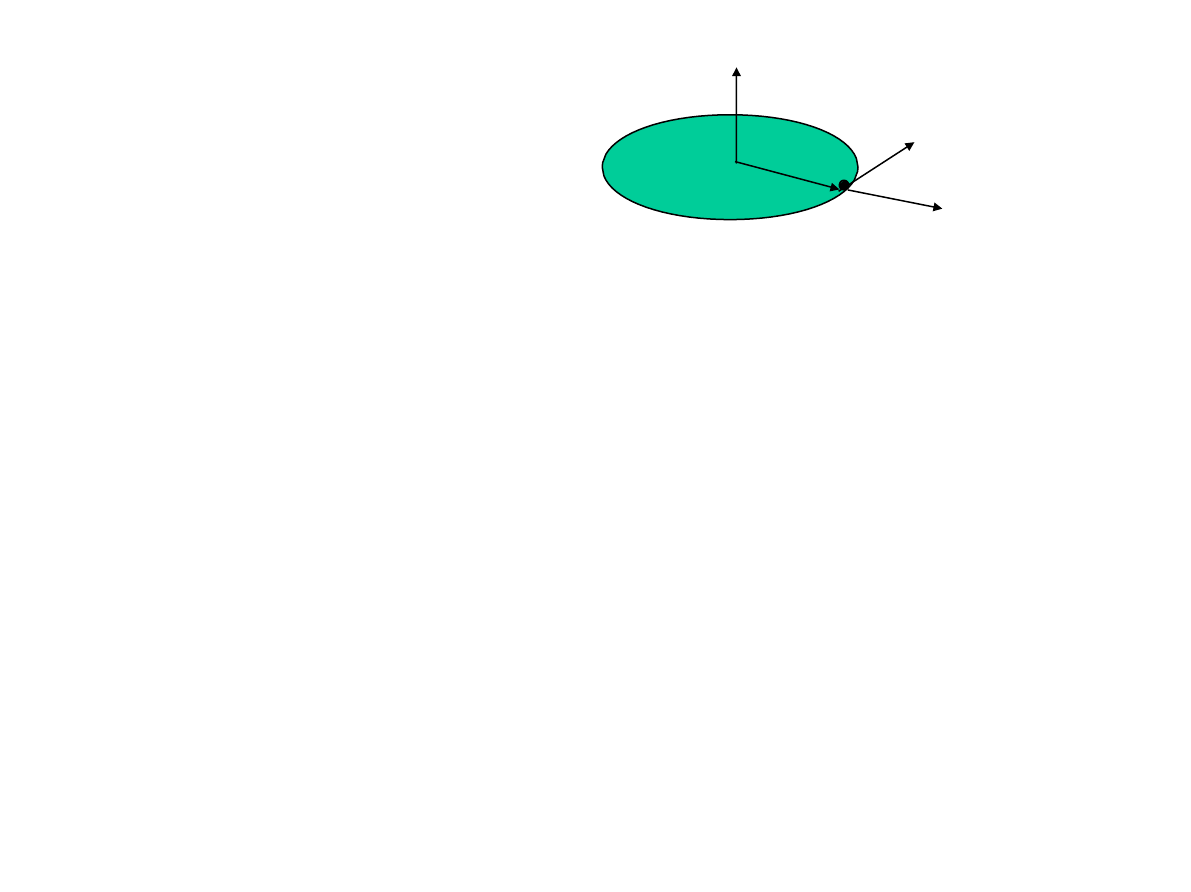
Z
siłami bezwładności spotykamy się przy obserwacji zjawisk
zwi
ązanych z ruchem przyspieszonym. Na przykład w obracającym
si
ę układzie odniesienia występuje siła bezwładności, nazywana
od
środkową siłą bezwładności:
F
F
b
0
(1.5.11)
Innym przyk
ładem siły bezwładności jest
s
iła Coriolisa
dzia
łająca
na cia
ło poruszające się ruchem postępowym w obracającym się
uk
ładzie odniesienia:
F
C
2
m
v
ω
(1.5.13)
ω
v
m
- pr
ędkość kątowa z jaką obraca się układ odniesienia
- pr
ędkość liniowa poruszającego się ciała
- masa poruszaj
ącego się ciała
Si
ła Coriolisa powoduje na przykład silniejsze podmywanie
prawego brzegu rzek na p
ółkuli północnej.
ω
r
v
F
od
m
2
r .
F
od
m
(1.5.12)
Film
„loop”.
Film
„rollercoaster”.
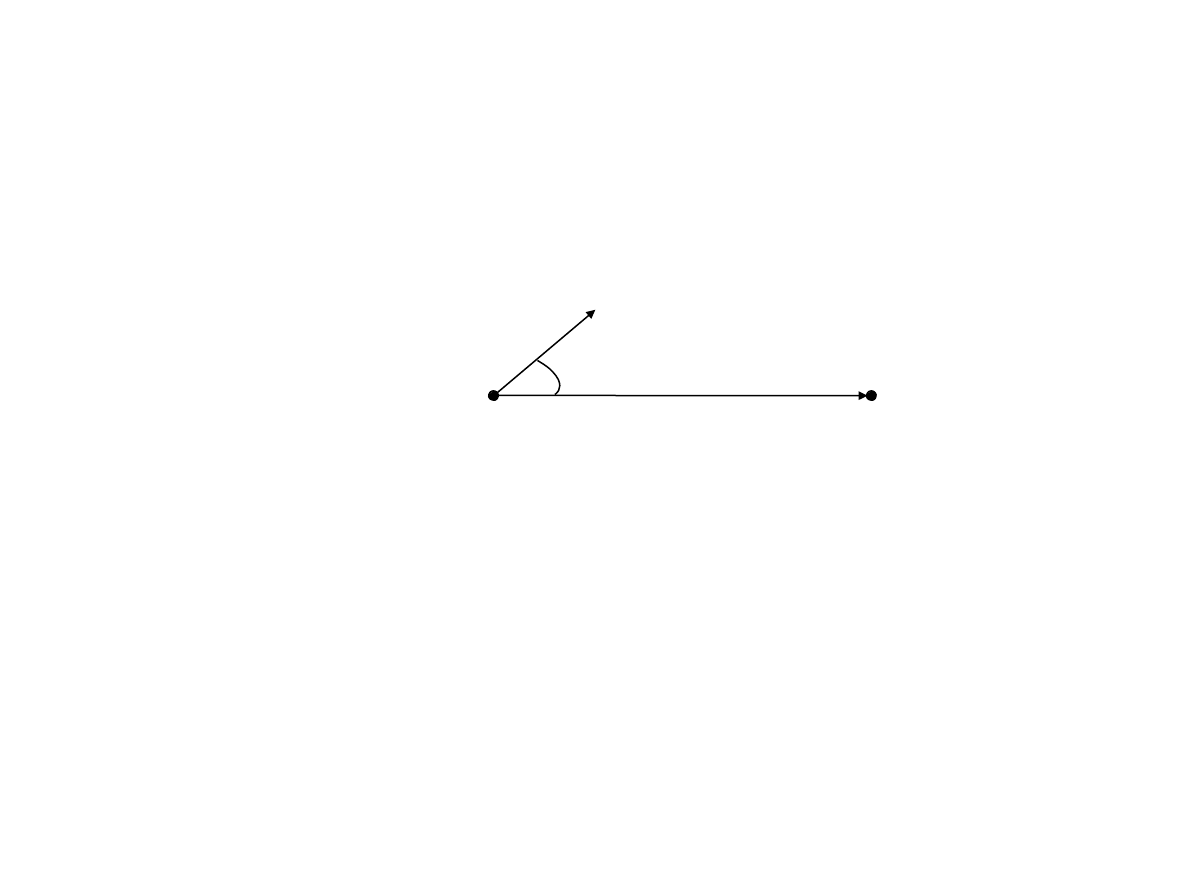
1.6 Praca, moc.
Rozwa
żmy przesunięcie ciała
dzia
łania siły
F
:
F
s
wz
dłuż linii prostej pod wpływem
A
B
Zak
ładamy, że podczas całej drogi AB wartość wektora
F
i
kąt α są stałe. W takim przypadku pracę W siły
F
na drodze
s
okre
ślamy wzorem:
s
W
F
s
| F || s | cos
.
(1.6.1)
Animacja: MechanicalWork
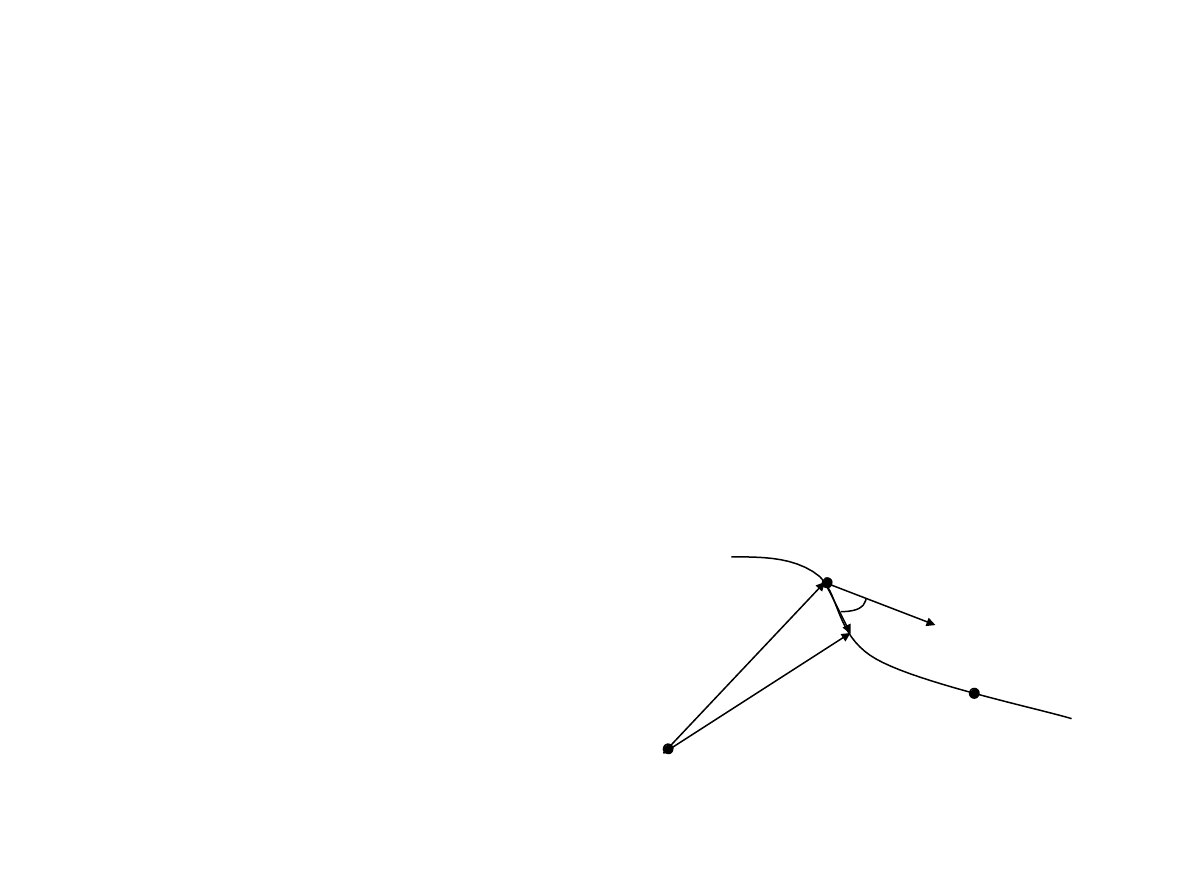
W przypadku og
ólnym (kiedy ciało porusza się po torze krzywoliniowym)
Elementarna praca dW, jak
ą należy wykonać w trakcie przesunięcia
odpowiadaj
ącego zmianie wektora położenia ciała
r
o
d r
,
jest okr
eślone wzorem:
dW
F
d r .
Ca
łkowitą pracę wykonaną w trakcie przesunięcia z punktu A
do punktu B wyznaczajmy ca
łkując elementarne prace z
(1.6.2)
po ca
łej drodze przesunięcia, czyli obliczamy całkę krzywoliniową
(1.6.2)
B
W
F
d r .
A
(1.6.3)
r
r
dr
d r
A
B
O
F

W przypadku, gdy na przyspieszane cia
ło nie działają żadne siły oporu
o
środka, w którym się ono porusza, wykonana praca W jest równa
energii kinetycznej E
k
, jak
ą ciało nabyło w wyniku przyspieszenia:
.
2
mv
2
W
E
k
(1.6.4)
Moc
średnią
pracy
ΔW wykonanej w czasie
Δt obliczy ze wzoru:
W
.
t
P
śr
(1.6.5)
Moc chwilow
ą
pracy definiujemy nast
ępująco
:
P
lim
W
dW
.
t
0
t
dt
(1.6.6)
Podstawiaj
ąc wyrażenie
(1.6.2) do (1.6.6) otrzymujemy zale
żność:
F
v ,
d r
P
F
dt
v
- chwilowa pr
ędkość ciała.
(1.6.7)

Film
„Praca, moc, energia” (od 1min , od 6 min 5s do 24 min)
1.7 Opory ruchu.
W skali pojedynczych ato
mów powierzchnie stykających się ciał są
nieregularne. Mechanizm strat energii polega na tym,
że gdy ślizgające
si
ę ciało trafia na nierówności, powstają odkształcenia ciał oraz ruchy
at
omów, co po pewnym czasie powoduje ogrzanie obu ciał.
Wielko
ść siły
tarcia po
ślizgowego
(wyst
ępującego w ruchu posuwistym)
okre
śla wzór:
F
N
- warto
ść siły nacisku ciała (składowej prostopadłej
do powierzchni po
ślizgu)
(1.7.1)
Animacja: StaticFriction
F
T
F
N
,
v
v
-wsp
ółczynnik tarcia poślizgowego
v
v
- wersor skierowany w kierunku ruchu cia
ła
Si
ła tarcia poślizgowego
F
T
nie zale
ży od pola geometrycznej
powierzchni styku cia
ł. Zależy ona od pola rzeczywistej powierzchni
styku na kt
órą ma wpływ stan powierzchni stykających się ciał
(wsp
ółczynnik μ we wzorze
(1.7.1))
i s
iła dociskająca
F
N
.
Ws
półczynnik tarcia poślizgowego ma z reguły różne wartości w chwili
rozpocz
ęcia ruchu (
ws
półczynnik tarcia statycznego
S
) oraz w trakcie
ruchu (
wsp
ółczynnik tarcia kinetycznego
k
), przy czym
S
>
k
.
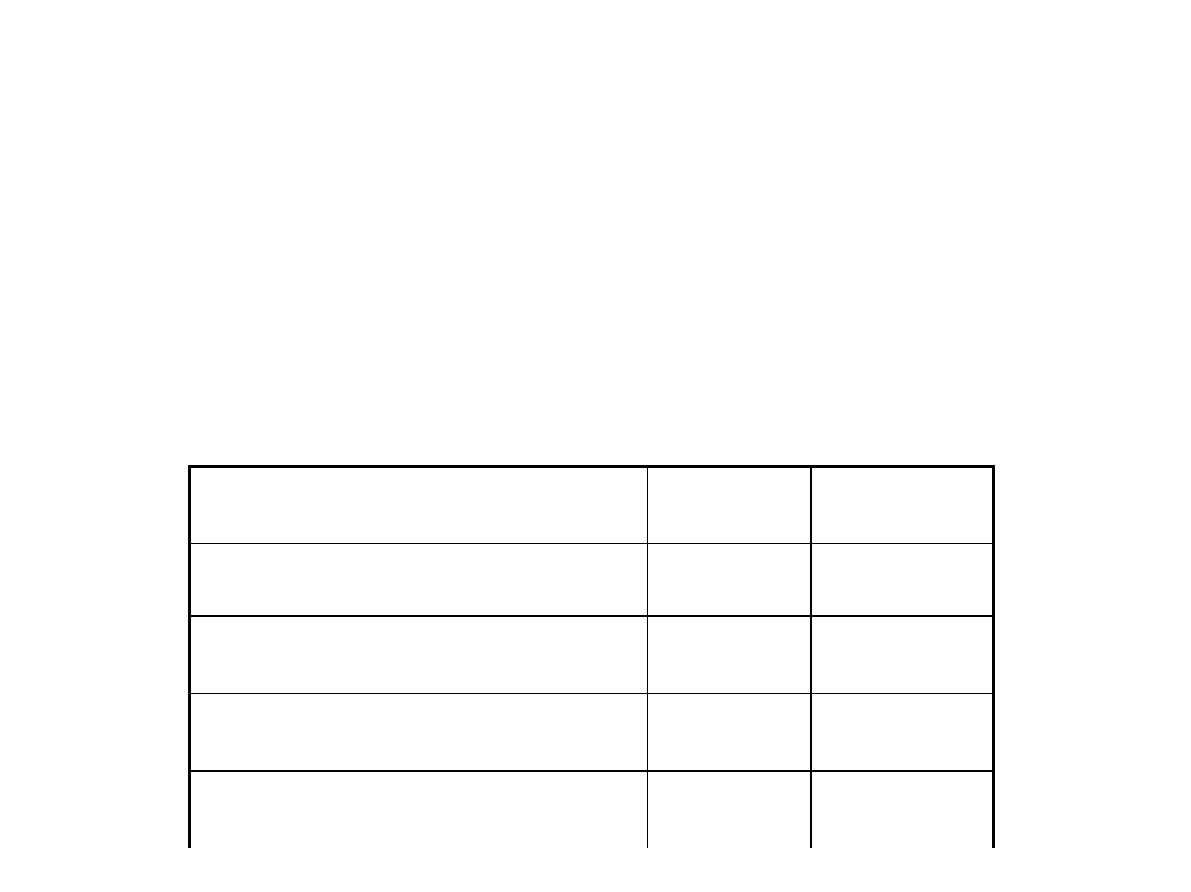
Przyk
ładowe wartości:
Materiał
S
k
opona – suchy beton
1.0
0.7
opona – mokry beton
0.7
0.5
teflon - teflon
0.04
0.04
stal - stal
0.15
0.03 – 0.09
Wprowadzeniu smaru pomi
ędzy trące o siebie powierzchnie zmienia
charakter oddzia
ływań molekularnych. Zamiast oddziaływań
pomi
ędzy atomami trących o siebie ciał mamy oddziaływania:
atom pod
łoża - atom smaru
atom smaru - atom smaru
atom smaru - atom t
rącego ciała.
O sile tarcia decyduj
ą wówczas siły najsłabszych oddziaływań. Z
reg
uły są to oddziaływania pomiędzy cząsteczkami smaru.
Innym rodzajem si
ł tarcia są siły
oporu toczenia
.
Warunkiem wprawienia cia
ła w ruch toczny (czyli pokonanie sił tarcia
tocznego) jest zadzia
łanie momentu sił (rysunek poniżej):
M
r
F ,
(1.7.2)
F
- si
ła wprawiająca ciało w ruch
- wektor po
łożenia punktu przyłożenia siły względem
chwilowej osi obrotu O.
r
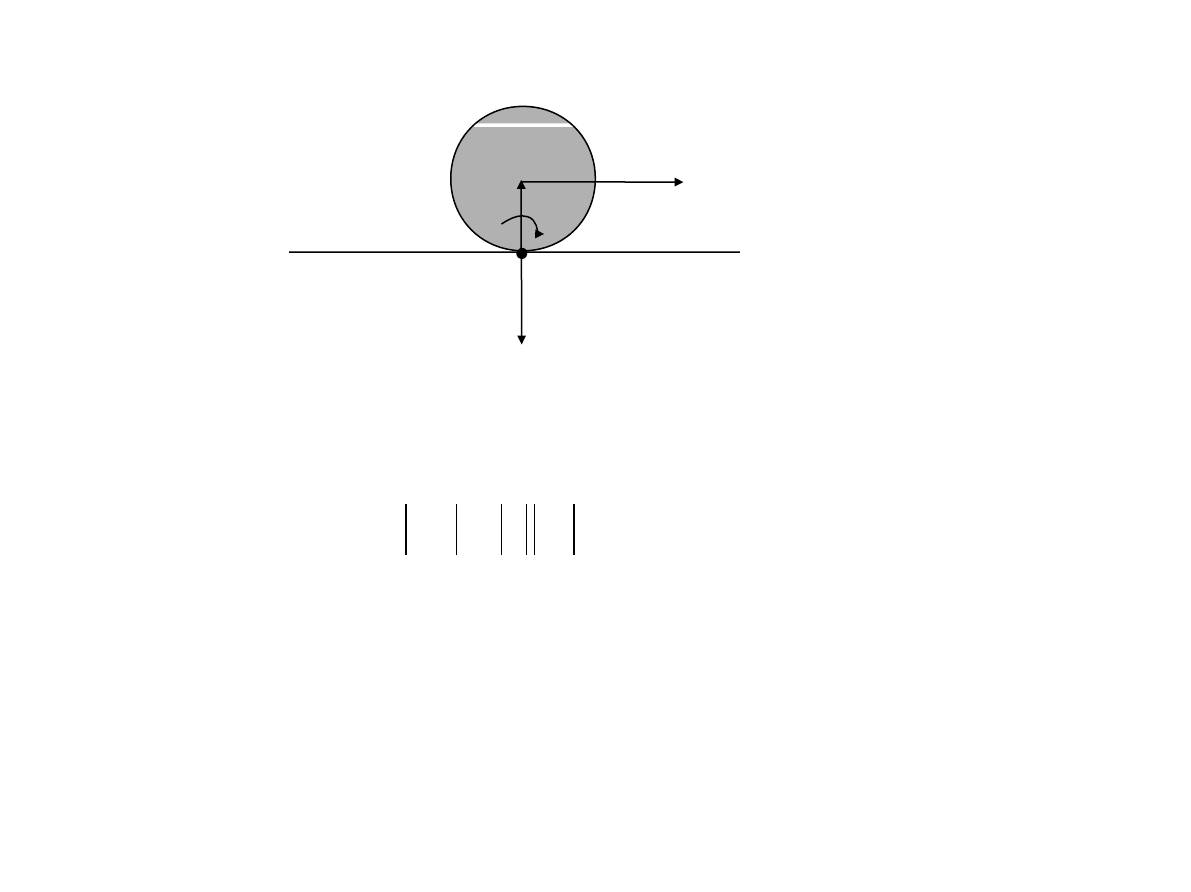
F
r
O
F
N
W przypadku, gdy si
ła
otrzymujemy:
F
dzia
ła w kierunku równoległym do podłoża
M
M
r F
rF .
(1.7.3)
Z do
świadczenia wynika, że wartość M momentu siły potrzebnego do
pokonania opo
rów toczenia jest proporcjonalna do siły nacisku
F
N
danego cia
ła na podłoże:
M
T
F
N
,
(1.7.4)
przy czym wsp
ółczynnik proporcjonalności
T
nazywany jest
wsp
ółczynnikiem tarcia toczenia
.
Wsp
ółczynnik tarcia toczenia ma wymiar długości ( [m] ).
Podstawiaj
ąc wzór
(1.7.3) do (1.7.4) mamy
F
N
.
r
F
T
(1.7.5)
Z pow
yższego wzoru wynika, że aby toczyć dane ciało należy użyć
si
ły proporcjonalnej do siły nacisku
F
N
i odwrotnie
proporcjonalnej do promienia krzywizny r.
Film
„Przyczyny tarcia” .
Film
„Opory ruchu” ( do 7 min 30 s).
2. Elektryczno
ść i magnetyzm.
2.1 Elektrostatyka.
2.1.1 Prawo Coulomba. Pole elektrostatyczne.
Elektrostatyka
zajmuje si
ę badaniem pól elektrycznych wytworzonych
przez nieruchome
ładunki.
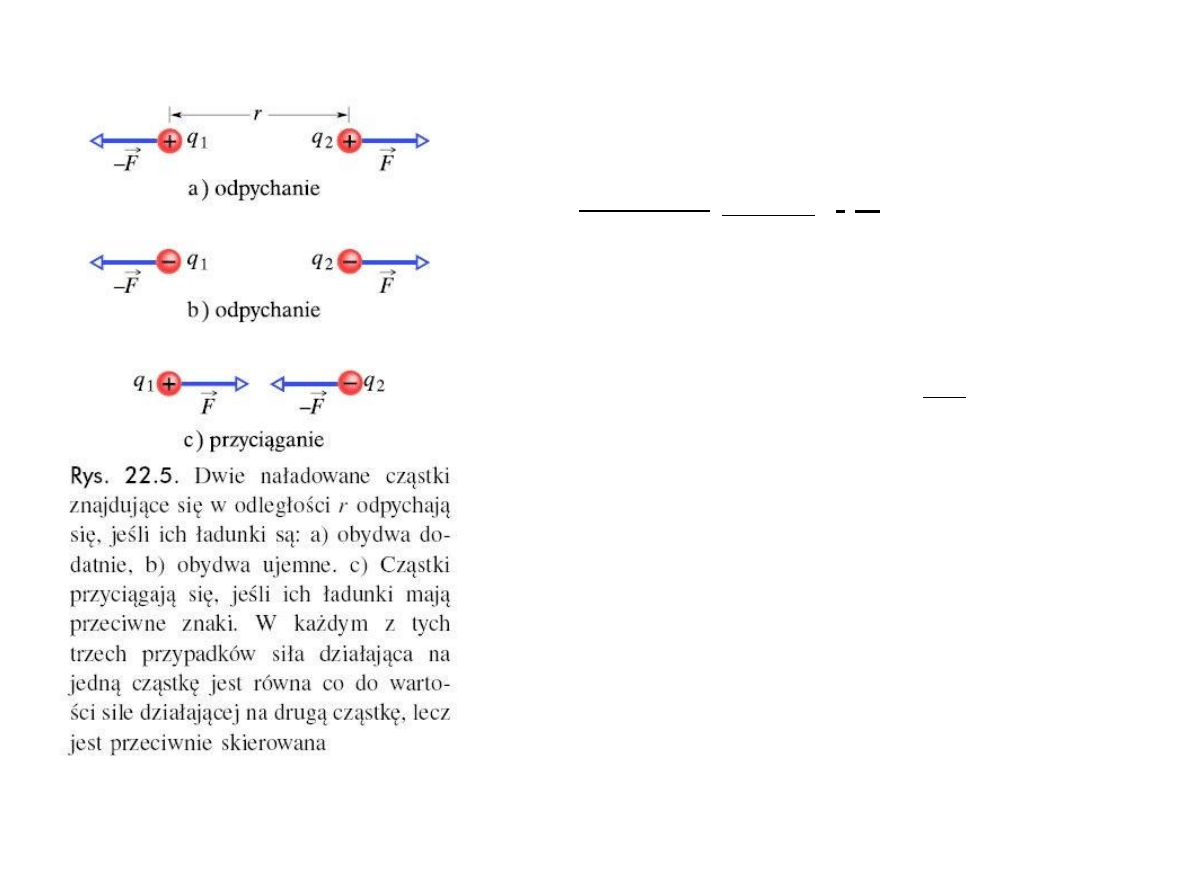
W przyrodzie wyst
ępują ładunki dodatnie i ujemne, które ze sobą
oddzia
łują, przy czym ładunki różnoimienne się przyciągają, a
jednoimienne si
ę odpychają.
Dla
ładunków punktowych siła jest wprost proporcjonalna do iloczynu
ich
ładunków i odwrotnie proporcjonalna do kwadratu odległości
mi
ędzy nimi:
r
,
| r |
|
2
| r
4
o
1
q
1
q
2
F
(2.1.1.1)
gdzie
m
8.85
10
12
F
o
jest przenikalno
ścią elektryczną
pr
óżni.
Wz
ór (2.1.1.1) jest matematycznym
zapisem
prawa Coulomba
.
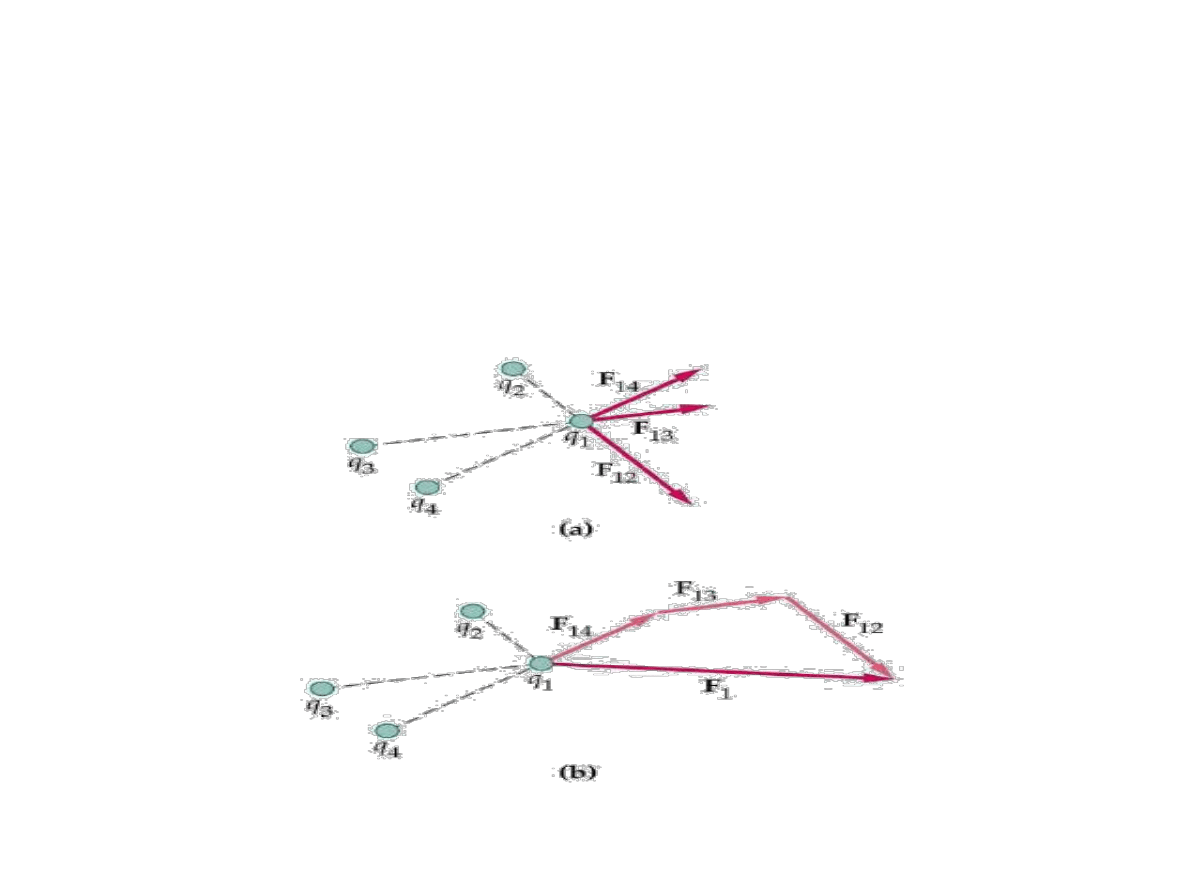
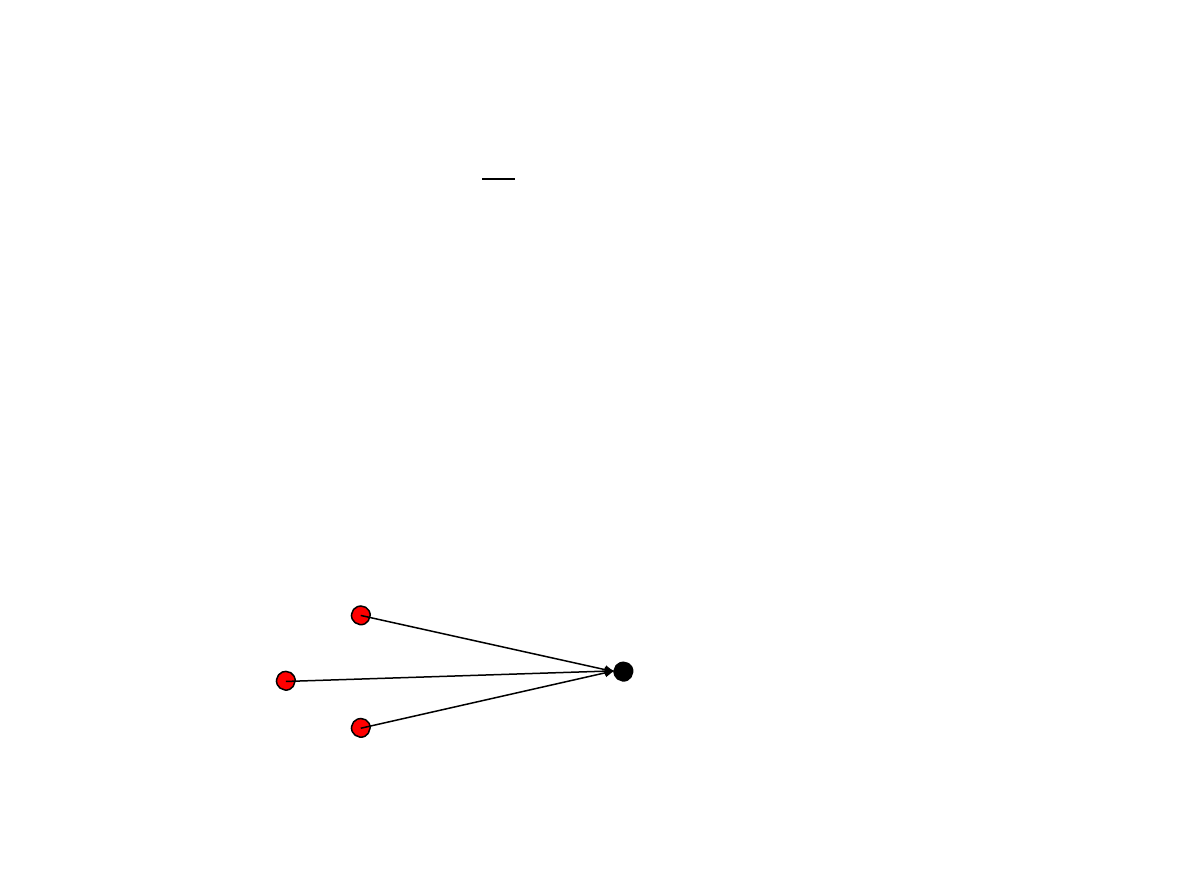
W przypadku uk
ładu więcej niż dwóch ładunków punktowych siła
dzia
łająca na jeden wyróżniony ładunek, jest równa sumie wektorowej
si
ł pochodzących od wszystkich ładunków:
F
1
F
12
F
13
...
F
1n
.
(2.1.1.2)

Ładunki elektryczne wytwarzają wokół siebie
pole elektryczne
– obszar
przestrzeni w kt
órym na umieszczone ładunki działają siły elektryczne.
Rozr
óżnia się pola fizyczne skalarne i wektorowe. W przypadku
pola
skalarnego
wielko
ść skalarna (np. temperatura) przyjmuje określoną
warto
ść w każdym punkcie przestrzeni. W przypadku
pola wektorowego
wielko
ść wektorowa (np. siła oddziaływania Culomba) przyjmuje w
k
ażdym punkcie przestrzeni wartość kierunek i zwrot.
Dla scharakteryzowania pola wprowadza si
ę pojęcie
wektora nat
ężenia
pola elektrycznego:
(2.1.1.3)
gdzie q jest
ładunkiem znajdującym się w polu elektrycznym, a
F
s
iłą z jaką pole oddziałuje na ten ładunek.
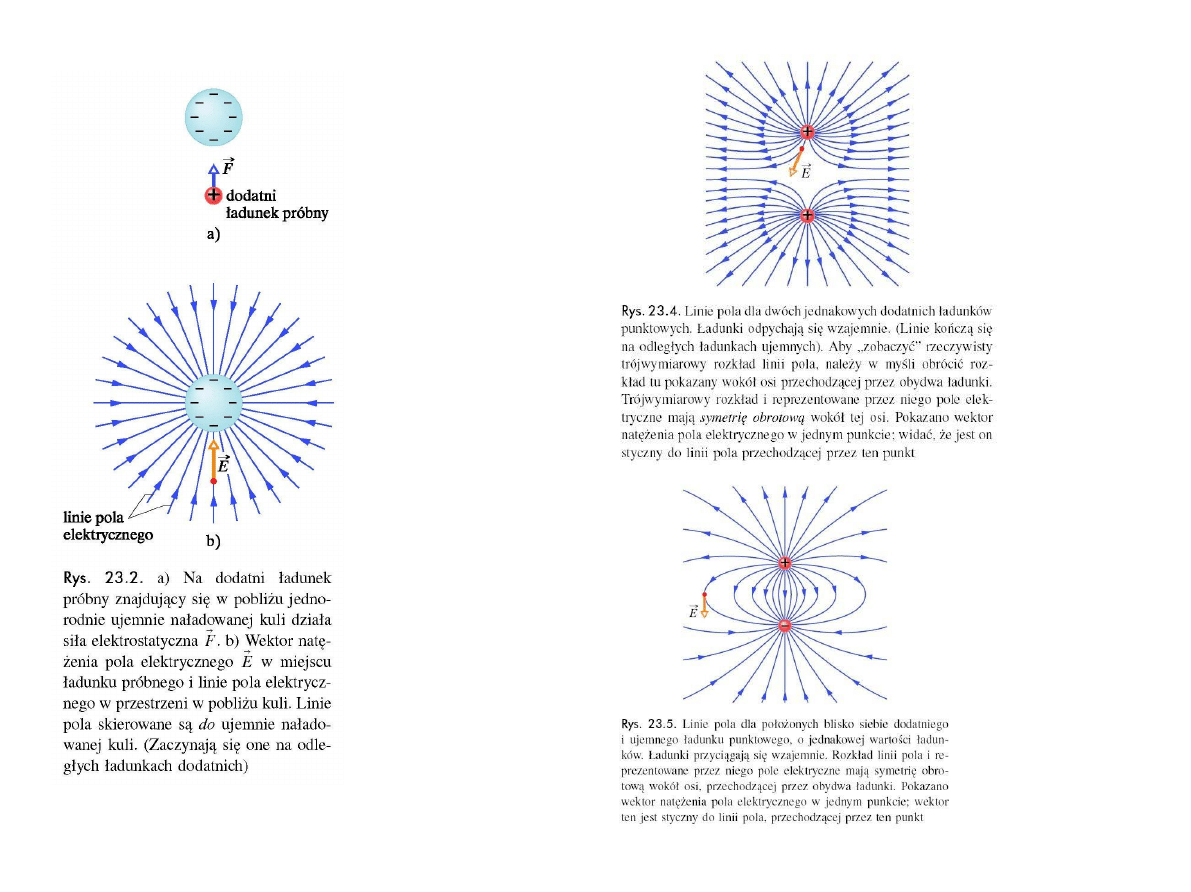
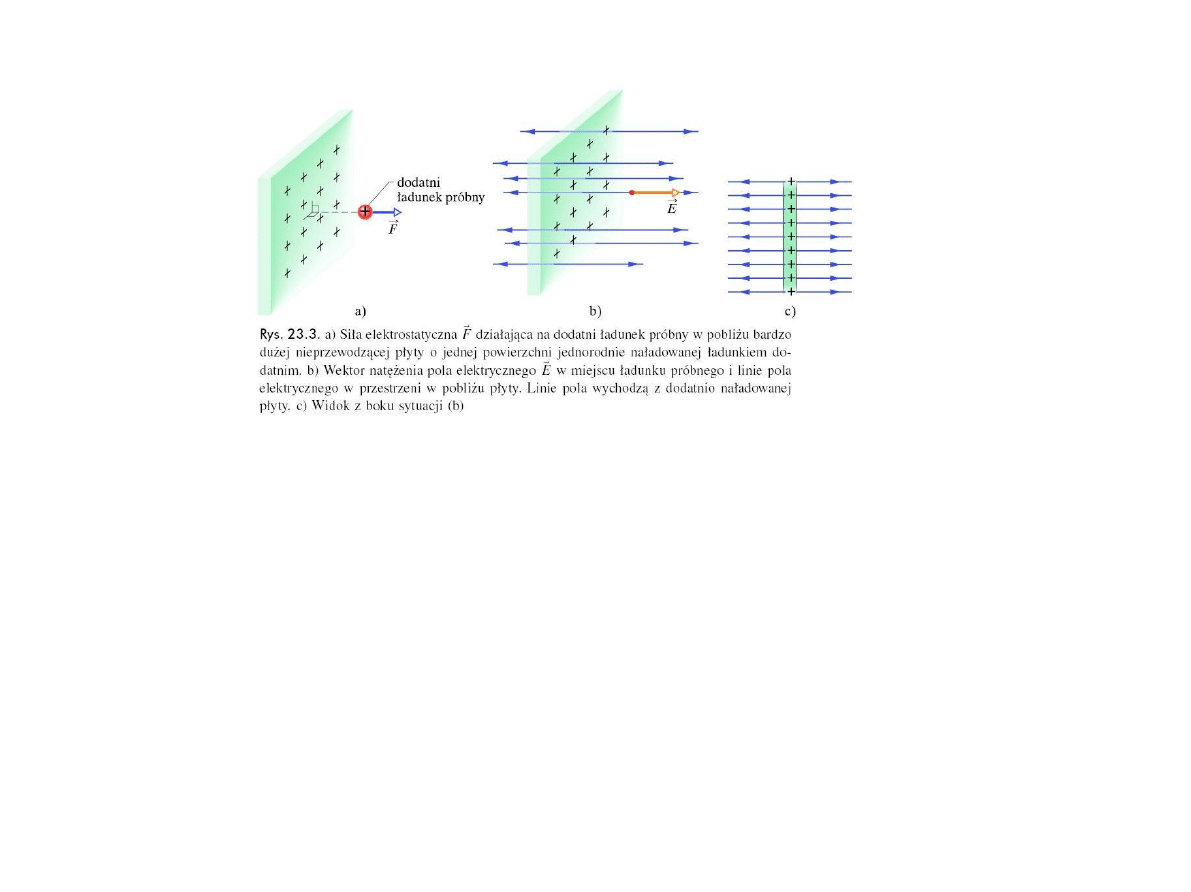
Pole elektryczne przedstawia si
ę również za pomocą
linii nat
ężenia
pola
, nazywane ta
kże
liniami s
ił
. S
ą to krzywe, do których styczne w
ka
żdym punkcie pokrywają się z kierunkiem wektora natężenia pola
elektrycznego (a wi
ęc i z kierunkiem wektora siły).
Przyk
ładowe rozkłady linii sił pola elektrycznego dla różnych rozkładów
ładunków:
E
F
,
q
J
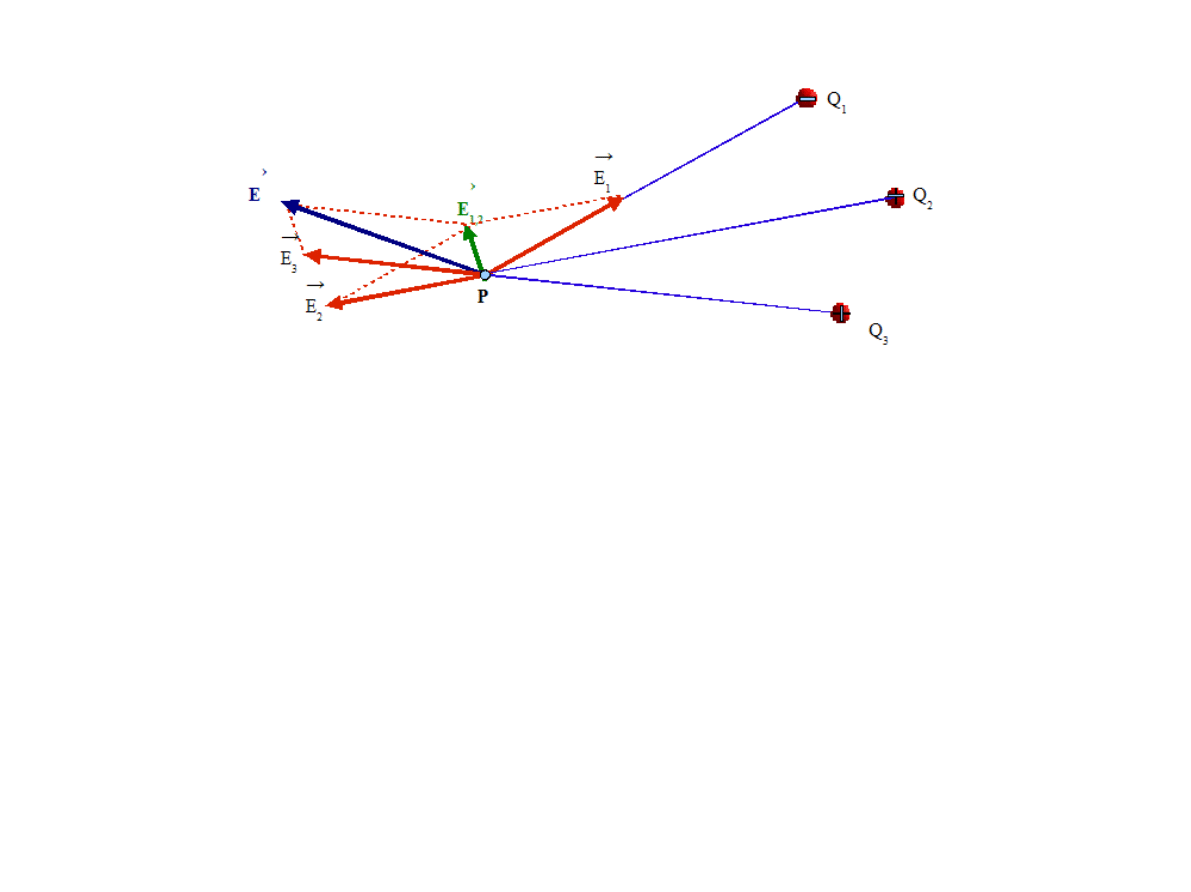
eżeli pole elektrostatyczne jest wytworzone przez układ Q
1
, Q
2
,
…Q
n
ładunków, to natężenia pola wypadkowego jest równe sumie
wektorowej nat
ężeń pól wytworzonych przez każdy z tych ładunków:
E
E
1
E
2
...
E
n
.
(2.1.1.4)
Pole elektrostatyczne jest polem zachowawczym (dzia
łające w nim siły
s
ą zachowawcze). Sensowne jest więc wprowadzenie dla niego energii
potencjalnej.
Energia potencjalna
ładunku punktowego jest równa pracy, jaką
wykonuj
ą siły pola , aby przenieść ładunek z danego punktu do
niesko
ńczoności.
Stosunek energii potencjalnej U
ładunku q do wartości tego ładunku
jest
potencja
łem pola elektrostatycznego
:
U
.
q
(2.1.1.5)
Potencja
ł φ jest wielkością skalarną, a jego jednostką jest wolt [V].
Je
śli pole jest wytworzone przez n ładunków punktowych
Q
1
, Q
2
,
…Q
n
, to potencja
ł w pewnym punkcie P pola
elektrostatycznego jest sum
ą potencjałów wytworzonych przez
pojedyncze
ładunki:
1
2
...
n
.
(2.1.1.6)
P
1
2
3
Q
1
Q
2
r
2
Q
3
r
1
r
3

Potencja
ł pochodzący od ładunku punktowego jest równy
,
4
o
| r
i
|
i
i
Q
(2.1.1.7)
gdzie
| r
i
|
jest odleg
łością danego ładunku od punktu, w którym
okre
ślany jest potencjał.
R
óżnica potencjałów między dwoma punktami nosi nazwę
napi
ęcia
elektrycznego
.
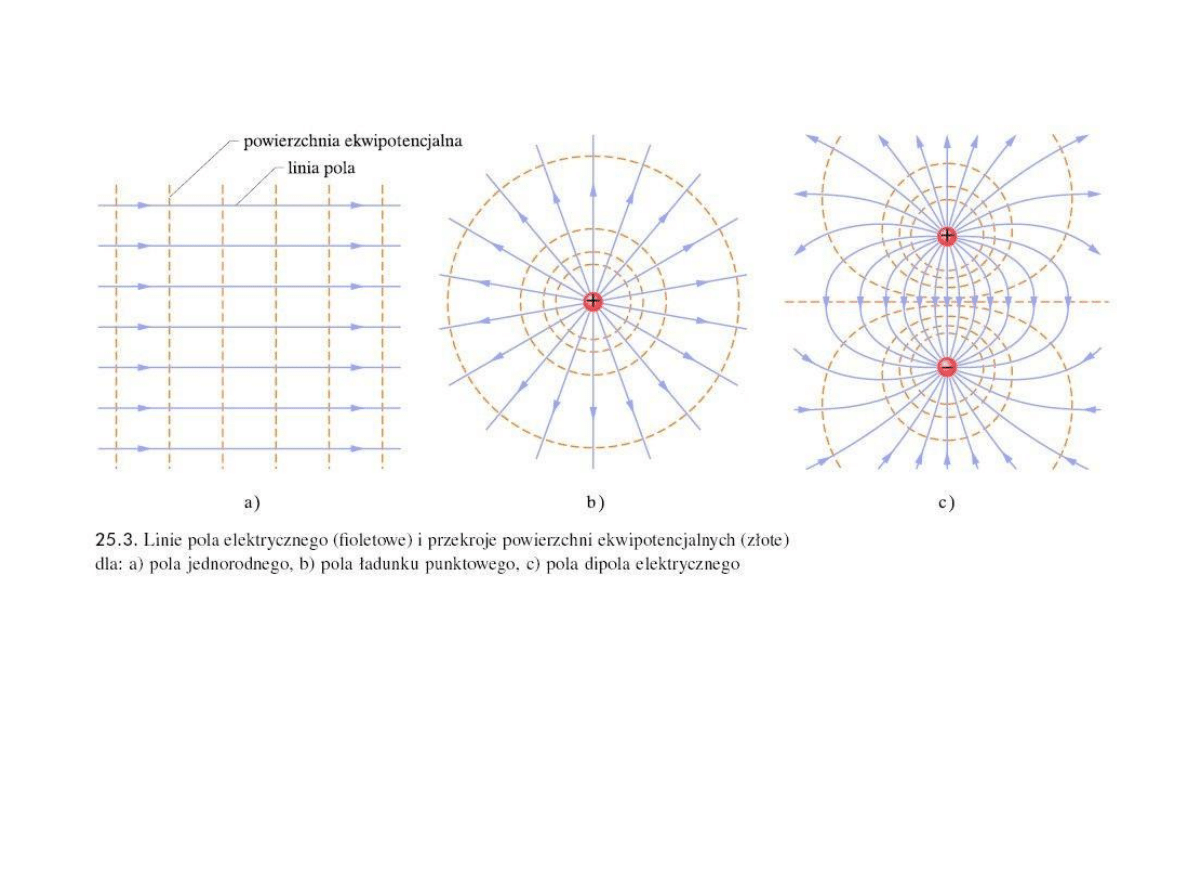
Opr
ócz linii pola, pole elektrostatyczne możemy przedstawić za pomocą
powierzchni ekwipotencjalnych,
czyli powierzchni o jednakowym
potencjale. Powierzchnie te s
ą prostopadłe do linii sił pola.
Powierzchnie ekwipotencjalne dla przyk
ładowych rozkładów ładunków:
Przyk
ład (animacja): „elektro”.
Film
„Siły w polu elektrycznym” (6 min 05 s – 17min 30 s).
2.2 P
rąd elektryczny.
Pr
ąd elektryczny
jest uporz
ądkowanym ruchem ładunków.
Ładunki przenoszone są za pośrednictwem
no
śników ładunku
.
W metalach no
śnikami ładunków są elektrony. W półprzewodnikach
no
śnikami ujemnymi są elektrony, nośnikami dodatnimi – dziury.
W cieczach no
śnikami ładunków są jony dodatnie (kationy) i jony
ujemne (aniony). W gazach no
śnikami prądu są jony i elektrony.
Za umowny kierunek p
rądu przyjmuje się kierunek ruchu nośników
dodatnich.
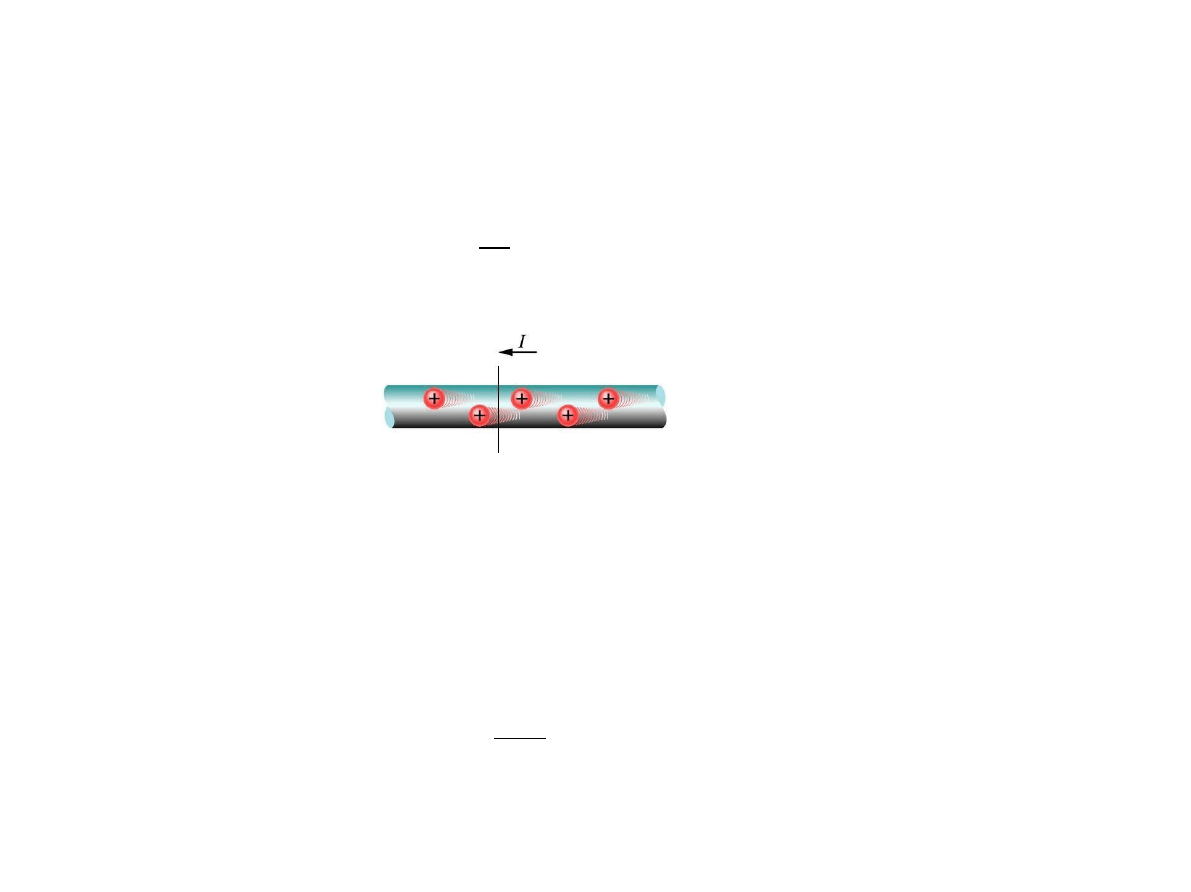
Nat
ężeniem prądu I nazywamy stosunek ładunku Q przepływającego
przez dany przekr
ój poprzeczny przewodnika S do czasu przepływu t
tego
ładunku:
I
Q
.
t
(2.2.1)
Jednostk
ą natężenia prądu
jest amper [A].
Nat
ężenie prądu płynącego przez daną substancję jest równe jednemu
amperowi, j
eżeli przez jej przekrój poprzeczny w czasie jednej sekundy
prze
pływa ładunek o wartości jednego kulomba:
[ A]
[C]
.
[s]
(2.2.2)
Przep
ływ prądu w przewodniku jest wywołany działaniem pola
elektrycznego na no
śniki ładunku znajdujące się wewnątrz
przewodnika. Zale
żnie od znaku ładunków nośniki te poruszają się
zgodnie z kierunkiem pola (no
śniki dodatnie), lub przeciwnie do
kierunku pola (no
śniki ujemne). Jeżeli zatem do końców przewodnika
przy
łożone zostanie napięcie U, to wytworzone w ten sposób pole
elektryczne spowoduje prze
pływ prądu o natężeniu I. Iloraz
I
R
U
(2.2.3)
nazywamy
oporem elektrycznym
.
Jednostk
ą oporu jest om [Ω]:
[
]
[V ]
.
[ A]
(2.2.4)
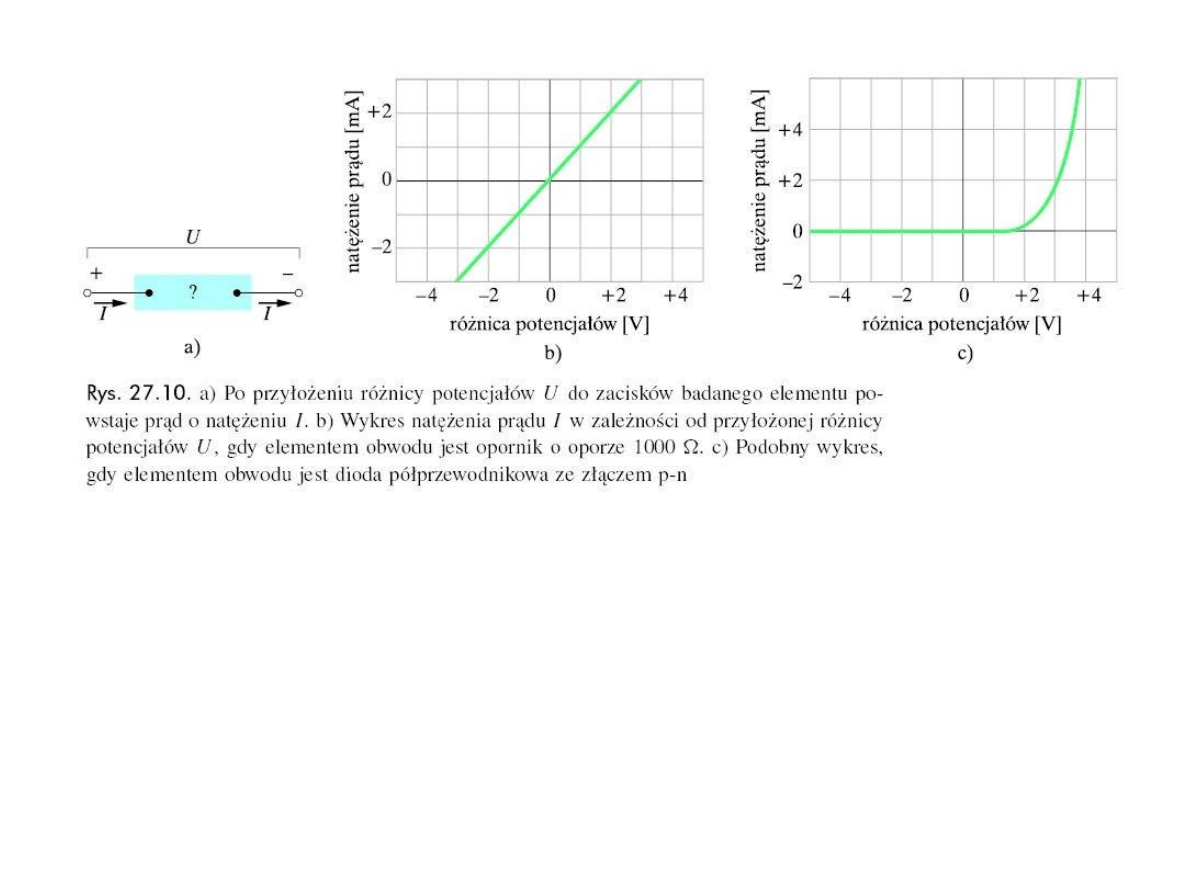
Do
świadczalnie ustalono, że stosunek napięcia między dwoma
punktami przewodnika do nat
ężenia przepływającego przez niego prądu
jest wielko
ścią stałą i nie zależy ani od napięcia, ani od natężenia prądu.
Powy
ższe twierdzenie nosi nazwę
prawa Ohma
.
Przepisuj
ąc wzór (2.2.3) w postaci
R
I
U
(2.2.5)
wnioskujemy,
że natężeniem prądu jest wprost proporcjonalne do
przy
łożonego napięcia.
Prawo Ohma jest
ściśle spełnione dla przewodników metalicznych
znajduj
ących się w stałej temperaturze.
Przyk
ład (animacja): „ohm”.
Op
ór danego przewodnika zależy od jego wymiarów. Jest on wprost
proporcjonalny do
długości l i odwrotnie proporcjonalny do przekroju
poprzecznego S przewodnika:
R
l
.
S
(2.2.6)
Wsp
ółczynnik proporcjonalności ρ we wzorze (2.2.6) nosi nazwę
oporu
właściwego
. Ze wzoru (2.2.6) wynika,
że jednostką oporu właściwego
jest [
Ω m].
Ze wzgl
ędu na opór właściwy materiały dzieli się umownie na
nast
ępujące grupy:
- metale, b
ędące bardzo dobrymi przewodnikami (ρ rzędu 10
-8
Ω m),
- p
ółprzewodniki (ρ rzędu 10
-6
Ω m),
- elektrolity (
ρ rzędu 10
-1
do 10
3
Ω m),
- izolatory (
ρ rzędu 10
10
do 10
16
Ω m).
Odwrotno
ść oporu właściwego nazywa się
przewodnictwem
właściwym
σ:
1
.
1
m
(2.2.7)
Wyszukiwarka
Podobne podstrony:
fizyka+calosc+git 1 KBYRIASGCQLFFFCOFTN7FUTYJDMTUDHIX522TTQ
Fizyka calosc id 177445 Nieznany
1 fizyka całość wszystko, dokumenty, Fizyka
fizyka calosc 2 id 176622 Nieznany
fizyka calosc
fizyka egzamin odpowiedzi, studia calosc, studia całość, fizyka
Egzamin pytania FizykaWNluty2014, studia calosc, studia całość, 3 semestr, inig, Fizyka II, Fizyka I
calosc, Moje, Studia, polimery, Fizyka
Całość, Akademia Górniczo - Hutnicza, Technologia Chemiczna, Studia stacjonarne I stopnia, SEMESTR 2
ściąga kolos1, Elektrotechnika, Rok 1, Fizyka
fiza calosc, BUDOWNICTWO PCZ I rok, Fizyka
fiza calosc(1), Fizyka, FIZYKA, Fiza egzamin
Medycyna fizykalna i balneoklimatologia-wykłady całość, Medycyna fizykalna i balneoklimatologia (wyk
całosc, studia rolnictwo, fizyka
Fizyka Kolos1 wyklady
badanie fizykalne wszystko całość wazne
więcej podobnych podstron