1
Wykład 1
Część 1
Badania operacyjne
jako dziedzina wiedzy
Definicja i krótki zarys historii
badań operacyjnych (1)
Badania operacyjne - dyscyplina naukowa
uważana najczęściej za jedną z dziedzin
nauk o zarządzaniu (ang. management
science), łącząca elementy
• ekonomii,
• matematyki
• naukowych metod organizacji,
.
Definicja i krótki zarys historii
badań operacyjnych (2)
a zajmująca się tworzeniem
• modeli,
• metod,
• reguł postępowania
prowadzących do podejmowania racjonalnych
decyzji.
Definicja i krótki zarys historii
badań operacyjnych (3)
Polska nazwa „badania operacyjne” jest
tłumaczeniem angielskich terminów
operational research (UK)/operations
research (USA). Pochodzi ona od badań
na efektywnością operacji wojskowych
(przede wszystkim o charakterze
logistycznym) podczas drugiej wojny
ś
wiatowej.
Zastosowanie badań
operacyjnych w praktyce
Przedmiotem zainteresowania w badaniach
operacyjnych są najczęściej problemy, które,
niezależnie od ich szczegółowej natury, można
scharakteryzować na dwa podstawowe sposoby:
•
maksymalizacja efektywności (maksymalizacja
zysku, stosunku przychodów do kosztów,
wydajności procesu produkcyjnego,
przepustowości sieci, szybkości obsługi klientów)
•
minimalizacja nakładów (minimalizacja kosztów,
czasu pracy/podróży, przebytej drogi, zużycia
surowców i energii, minimalizacja ryzyka)
6
Podstawowe pojęcia (1)
Parametrami modeli matematycznych
występujących w badaniach operacyjnych
nazywamy
ustalone tzn. niezmienne
podczas obliczeń liczby oznaczające np.
• parametry techniczne maszyn,
• koszty/przychody/zyski jednostkowe,
• opisane liczbowo wymogi prawne,
zapotrzebowania na towary/usługi,
• parametry rozkładów prawdopodobieństwa.
7
Podstawowe pojęcia (2)
Zmienne w modelach matematycznych
występujących w badaniach operacyjnych
nazywa się często
zmiennymi decyzyjnymi.
W sensie matematycznym są to zwykłe
zmienne, a określenie „decyzyjne” ma
jedynie na celu podkreślenie faktu, że
oznaczają one wielkości, które, w
przeciwieństwie do parametrów modelu,
można zmieniać (np. wielkość produkcji,
ilość przewiezionych towarów).
8
Podstawowe pojęcia (3)
Poza zmiennymi decyzyjnymi w modelach
matematycznych mogą też pojawić się tzw.
zmienne pomocnicze. Zmienne te nie
reprezentują wielkości, co do których są
podejmowane decyzje opisywane przez
model. Mogą one służyć do uproszczenia
zapisu modelu lub być wykorzystywane
przez algorytmy rozwiązujące problem.
9
Wykład 1
Część 2
Programowanie liniowe -
informacje wstępne
10
Programowanie liniowe
- definicja słowna
Programowanie liniowe jest to maksymalizacja lub
minimalizacja liniowej funkcji wielu zmiennych
1
x
,
2
x
,…,
n
x
(zwanej funkcją celu), gdy zmienne te podlegają liniowym
warunkom ograniczającym w postaci równań lub
nierówności ≤, ≥.
Słowo „liniowy” oznacza, iż funkcja celu oraz lewe strony
warunków ograniczających mogą być zapisane jako
parametr_1∙
1
x
+ parametr_2∙
2
x
+…+ parametr_n∙
n
x
a prawe strony warunków ograniczających to liczby.
Programowanie liniowe
- wyjaśnienie nazwy
Słowo
"programowanie" występujące w nazwie
„programowanie liniowe” (a także w innych
nazwach poddziedzin badań operacyjnych)
nie
oznacza programowania w sensie tworzenia
programów komputerowych. Słowo to jest
używane jako
synonim słowa „planowanie”
(ang. planning) i wywodzi się z terminologii
stosowanej w początkach badan operacyjnych w
czasie drugiej wojny światowej.
11
Programowanie liniowe
- stosowane skróty
Programowanie liniowe jako jeden z rodzajów
optymalizacji jest niekiedy oznaczane skrótem
PL (albo LP od ang. linear programming).
Konkretny liniowy problem optymalizacyjny
czyli zadanie programowania liniowego jest
oznaczane skrótem
ZPL.
12
13
Programowanie liniowe - postać ogólna (1)
min
max/
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
(funkcja celu)
przy ograniczeniach
i
n
in
i
i
b
x
a
x
a
x
a
≤
+
+
+
...
2
2
1
1
p
i
,...,
2
,
1
=
i
n
in
i
i
b
x
a
x
a
x
a
≥
+
+
+
...
2
2
1
1
.…
q
p
i
,...,
2
,
1
+
=
i
n
in
i
i
b
x
a
x
a
x
a
=
+
+
+
...
2
2
1
1
….
m
q
i
,...,
2
,
1
+
=
(ograniczenia funkcyjne)
0
≥
j
x
1
,...,
2
,
1
n
j =
,
n
n ≤
1
(warunki nieujemności zmiennych)
14
Programowanie liniowe - postać ogólna (2)
ij
a ,
i
b ,
j
c są to parametry
zadania/modelu programowania liniowego
j
x - są to zmienne
zadania/modelu programowania liniowego
15
Czy warunki nieujemności zmiennych są
liniowymi warunkami ograniczającymi?
Tak. Każdy warunek nieujemności zmiennej
można zapisać następująco:
⇔
≥
0
1
x
0
0
...
0
1
2
1
≥
+
+
+
n
x
x
x
⇔
≥
0
2
x
0
0
...
1
0
2
1
≥
+
+
+
n
x
x
x
M
⇔
≥
0
n
x
0
1
...
0
0
2
1
≥
+
+
+
n
x
x
x
16
Dlaczego warunki nieujemności zmiennych
są „wyróżnione” w postaci ogólnej ZPL?
1. Najważniejsza metoda rozwiązywania
ZPL, tzw. metoda simpleks wymaga
nieujemności zmiennych (gdy któraś z
nich może przyjmować wartości
ujemne, wymagane są pewne
przekształcenia ZPL).
2. W zastosowaniach praktycznych PL
zmienne muszą być najczęściej
nieujemne, ponieważ opisują wielkości
przyjmujące wartości nieujemne.
17
Czy jest możliwe zapisane ogólnej
postaci ZPL w prostszej postaci?
Tak. Każde ZPL można sprowadzić do postaci zwanej
niekiedy
postacią standardową.
Występują dwa warianty postaci standardowej:
• z
maksymalizacją funkcji celu i wszystkimi
ograniczeniami funkcyjnymi typu ≤ ;
• z
minimalizacją funkcji celu i wszystkimi
ograniczeniami funkcyjnymi typu ≥.
Nierówności w ograniczeniach funkcyjnych typu ≤
w zadaniach maksymalizacji oraz typu ≥ w zadaniach
minimalizacji nazywane są nierównościami typowymi.
18
Programowanie liniowe - postać
standardowa dla maksymalizacji
max
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
(funkcja celu)
przy ograniczeniach
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
≤
+
+
+
2
2
2
22
1
21
...
b
x
a
x
a
x
a
n
n
≤
+
+
+
M
m
n
mn
m
m
b
x
a
x
a
x
a
≤
+
+
+
...
2
2
1
1
(ograniczenia funkcyjne)
0
≥
j
x
n
j
,...,
2
,
1
=
(warunki nieujemności zmiennych)
19
Programowanie liniowe - postać
standardowa dla minimalizacji
min
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
(funkcja celu)
przy ograniczeniach
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
≥
+
+
+
2
2
2
22
1
21
...
b
x
a
x
a
x
a
n
n
≥
+
+
+
M
m
n
mn
m
m
b
x
a
x
a
x
a
≥
+
+
+
...
2
2
1
1
(ograniczenia funkcyjne)
0
≥
j
x
n
j
,...,
2
,
1
=
(warunki nieujemności zmiennych)
20
Zbiór rozwiązań dopuszczalnych zadania
programowania liniowego - definicja
Zbiór wszystkich
n
n
x
x
x
x
R
∈
=
)
,...,
,
(
2
1
spełniających
wszystkie warunki ograniczające danego zadania
programowania liniowego nazywamy zbiorem
rozwiązań dopuszczalnych (lub krótko: zbiorem
dopuszczalnym) D a jego elementy rozwiązaniami
dopuszczalnymi.
21
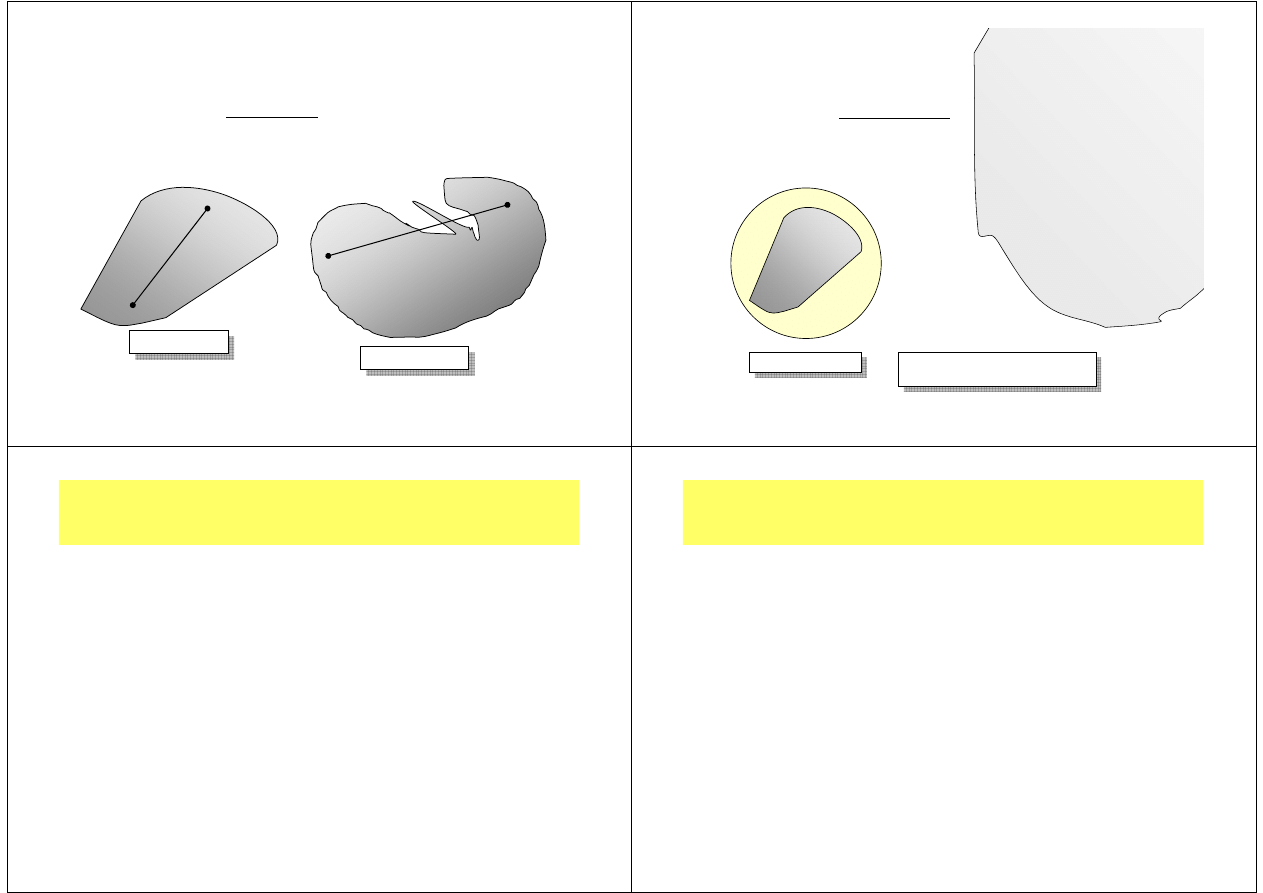
Zbiór wypukły - definicja
Zbiór nazywamy wypukłym, jeżeli dla dowolnych
dwóch punktów należących do tego zbioru, jest w nim
zawarty cały odcinek łączący te punkty.
Zbiór wypukły
Zbiór niewypukły
22
Zbiór ograniczony –
definicja
Zbiór nazywamy ograniczonym,
jeżeli istnieje kula
(na płaszczyźnie koło)
zawierająca ten zbiór
Zbiór ograniczony
Zbiór nieograniczony
– „rozciąga się do nieskończoności”
23
Zbiór rozwiązań dopuszczalnych ZPL –
twierdzenie o kształcie zbioru (1)
Niech n oznacza liczbę zmiennych
decyzyjnych. Wtedy z geometrycznego
punktu widzenia zbiór rozwiązań
dopuszczalnych D zadania programowania
liniowego może być
1) zbiorem ograniczonym:
dla
n=2 - wielokątem wypukłym;
dla
n=3 - wielościanem wypukłym;
dla
n>3 - n-wymiarowym „wielościanem”
wypukłym.
24
2) zbiorem nieograniczonym:
dla
n=2 - nieograniczonym wypukłym
podzbiorem płaszczyzny, którego krawędzie
są półprostymi i ewentualnie odcinkami;
dla
n≥3 - nieograniczonym wypukłym
podzbiorem przestrzeni n-wymiarowej,
którego krawędzie są półprostymi i
ewentualnie
odcinkami.
Zbiór rozwiązań dopuszczalnych ZPL –
twierdzenie o kształcie zbioru (2)
25
Dla pewnych zestawów warunków
ograniczających zbiór dopuszczalny D
może mieć szczególną postać:
• Jest
figurą o niższym wymiarze niż
wymiar przestrzeni (np. jest wielokątem
lub nieograniczonym podzbiorem
płaszczyzny w przestrzeni 3-wymiarowej),
a w szczególności półprostą, odcinkiem
czy wręcz pojedynczym punktem.
• Jest
zbiorem pustym (przypadek
sprzeczności warunków ograniczających).
Zbiór rozwiązań dopuszczalnych ZPL –
twierdzenie o kształcie zbioru (3)
26
W
ogólnym przypadku jest to niemożliwe.
Jednakże istnieją istotne z praktycznego punktu
widzenia typy ZPL, dla których przy realistycznych
parametrach można orzec, że zbiór dopuszczalny D
jest niepusty i, odpowiednio, ograniczony albo
nieograniczony.
Niekiedy można również stwierdzić bez obliczeń, że
zbiór dopuszczalny D jest pusty. Można ten fakt
wywnioskować z wartości niektórych parametrów w
warunkach ograniczających albo z występowania
jednocześnie warunków ograniczających w oczywisty
sposób sprzecznych, jak np.
Czy można stwierdzić bez obliczeń, czy
zbiór dopuszczalny jest ograniczony/
nieograniczony/pusty?
5
1
,
4
7
3
3
2
1
≤
+
+
x
x
x
8
1
,
4
7
3
3
2
1
≥
+
+
x
x
x
27
Jak można stwierdzić, czy dane liczby są
rozwiązaniem dopuszczalnym?
W ogólnym przypadku sprawdzenie czy dane
n
n
x
x
x
x
R
∈
=
)
,...,
,
(
2
1
jest rozwiązaniem dopuszczalnym
danego zadania programowania liniowego wymaga
podstawienia wszystkich powyższych liczb do
wszystkich warunków ograniczających.
Sprawdzenie niektórych warunków takich jak np.
warunki nieujemności zmiennych jest naturalnie
trywialne, ale oczywiście rozbudowane ograniczenia
funkcyjne wymagają szczegółowych obliczeń.
28
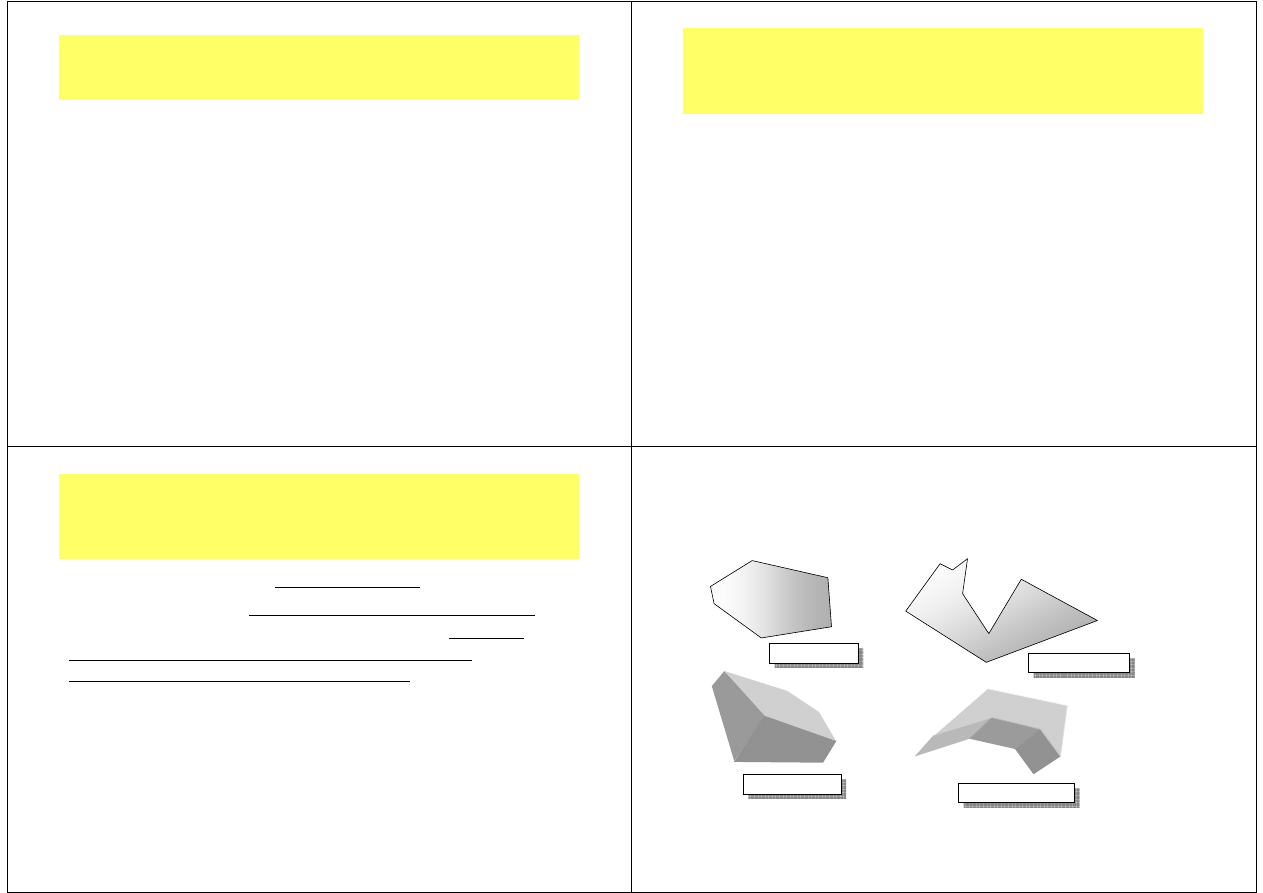
Zbiór rozwiązań dopuszczalnych
kształt zbioru c.d.
Przykłady wielokątów i wielościanów wypukłych i niewy-
pukłych
Wielokąt wypukły
Wielokąt niewypukły
Wielościan wypukły
Wielościan niewypukły
29
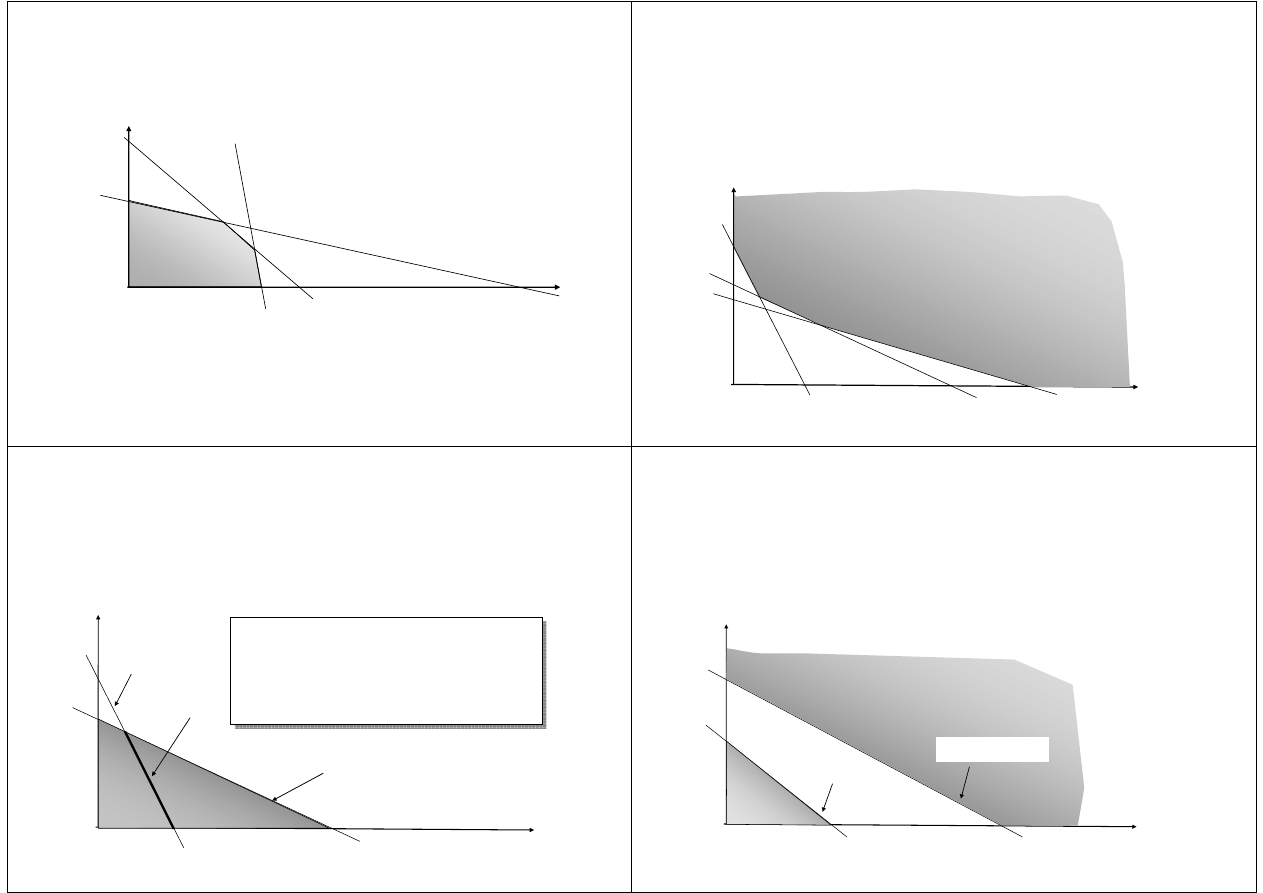
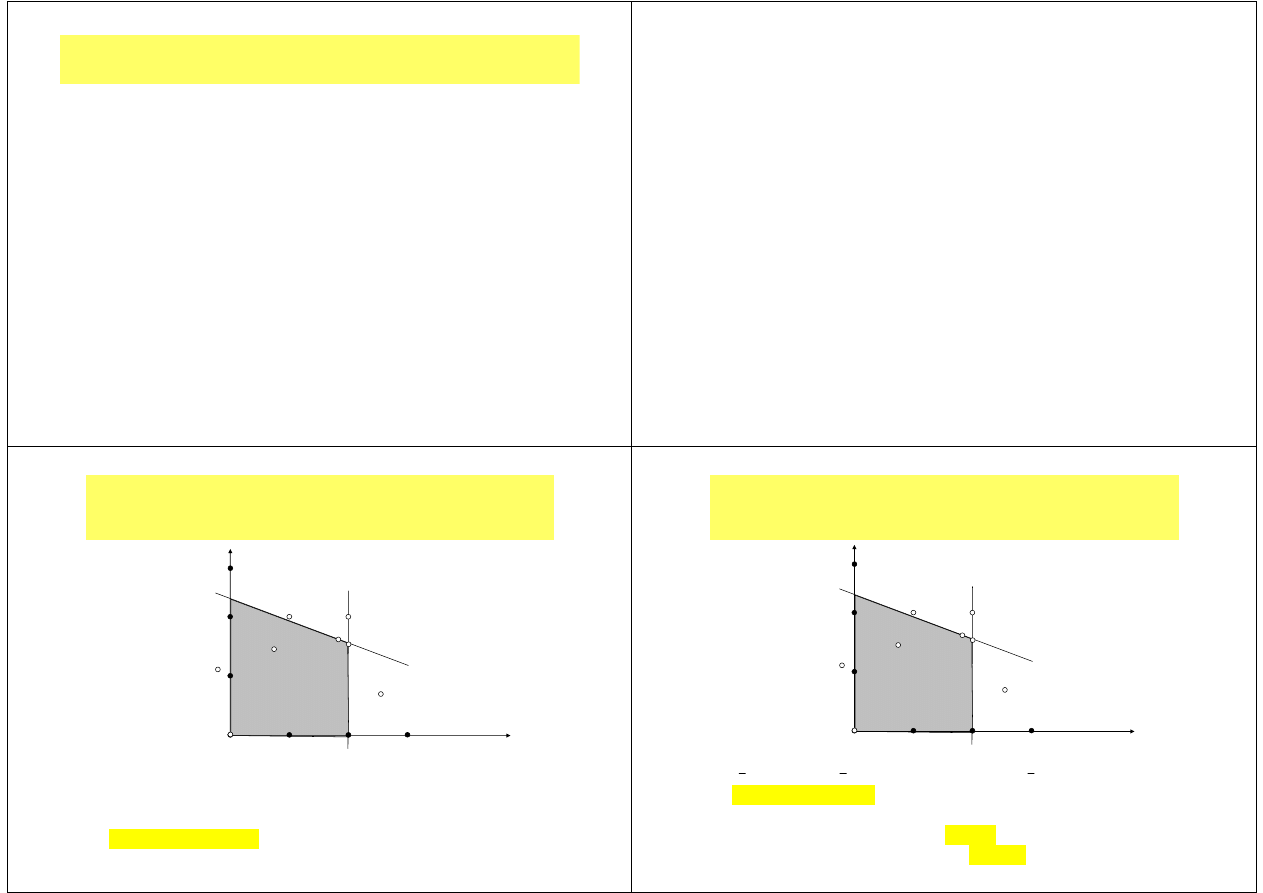
Zbiór rozwiązań dopuszczalnych - przykłady
Przykład 1 - zbiór dopuszczalny jest wielokątem
(zbiór ograniczony).
Zbiór rozwiązań dopuszczalnych D dla przypadku n=2.
Zbiór dopuszczalny może mieć taki kształt, gdy wszystkie
ograniczenia funkcyjne mają postać
k
k
k
b
x
a
x
a
≤
+
2
2
1
1
z
dodatnimi parametrami.
x
1
x
2
D
30
Zbiór rozwiązań dopuszczalnych - przykłady
Przykład 2 - zbiór rozwiązań dopuszczalnych jest
nieograniczonym podzbiorem płaszczyzny
(zbiór nieograniczony).
Zbiór dopuszczalny może mieć taki kształt np. gdy wszystkie
ograniczenia funkcyjne mają postać
k
k
k
b
x
a
x
a
≥
+
2
2
1
1
z dodatnimi
parametrami
x
1
x
2
D
D
31
Zbiór rozwiązań dopuszczalnych-przykłady
Przykład 3 - zbiór dopuszczalny na płaszczyźnie (czyli w przestrzeni
2-wymiarowej) jest odcinkiem (czyli jest jednowymiarowy). Zbiór
dopuszczalny może mieć taki kształt np. gdy w modelu występują
ograniczenia „równościowe” czyli typu
j
j
j
b
x
a
x
a
=
+
2
2
1
1
.
x
1
x
2
D
k
k
k
b
x
a
x
a
≤
+
2
2
1
1
j
j
j
b
x
a
x
a
=
+
2
2
1
1
Zbiór D (odcinek) jest częścią wspólną prostej
j
j
j
b
x
a
x
a
=
+
2
2
1
1
oraz części wspólnej 3 pół-
płaszczyzn (wyznaczonych przez warunki
nieujemności zmiennych oraz nierówność
k
k
k
b
x
a
x
a
=
+
2
2
1
1
. Część wspólna w/w 3 półpłasz-
czyzn jest oznaczona jako szary trójkąt.
32
Zbiór rozwiązań dopuszczalnych
Przykład 4 - zbiór rozwiązań dopuszczalnych D jest pusty.
Taka sytuacja może mieć miejsce, gdy w warunkach ograniczających
występują wzajemnie się wykluczające nierówności
k
k
k
b
x
a
x
a
≤
+
2
2
1
1
oraz
j
j
j
b
x
a
x
a
≥
+
2
2
1
1
.
x
1
x
2
k
k
k
b
x
a
x
a
≤
+
2
2
1
1
j
j
j
b
x
a
x
a
≥
+
2
2
1
1
33
Rozwiązanie optymalne zadania
programowania liniowego - definicja
Rozwiązaniem optymalnym (lub krótko – rozwiązaniem)
zadania programowania liniowego nazywamy każdy zbiór
n liczb należących do zbioru rozwiązań dopuszczalnych D:
D
x
x
x
x
n
∈
=
)
,...,
,
(
*
*
2
*
1
*
dla których funkcja celu
n
n
x
c
x
c
x
c
+
+
+
...
2
2
1
1
osiąga maksimum
albo minimum.
Rozwiązanie optymalne:
•
istnieje, jeżeli D jest zbiorem ograniczonym.
•
może nie istnieć, jeżeli D jest zbiorem nieograniczonym
•
nie istnieje, jeżeli D jest zbiorem pustym
Uwaga: Symbole:
n
i
x
i
,...,
1
,
*
=
oznaczają konkretne liczby
będące rozwiązaniem, a nie zmienne!
34
Twierdzenie o rozwiązaniach
optymalnych zadania progr. liniowego
Jeżeli istnieje rozwiązanie optymalne zadania
programowania liniowego, to są to
współrzędne
przynajmniej jednego z wierzchołków zbioru
dopuszczalnego D.
Rozwiązaniami optymalnymi ZPL mogą być
również
współrzędne dwóch lub więcej
wierzchołków zbioru dopuszczalnego D. Jest to
przypadek tzw. rozwiązań wielokrotnych/
alternatywnych.
Wówczas rozwiązaniami są również współrzędne
wszystkich punktów (jest ich nieskończenie wiele)
położonych pomiędzy w/w punktami.
35
Rozwiązania wierzchołkowe
i niewierzchołkowe zadania
programowania liniowego - definicja
Rozwiązaniem wierzchołkowym zadania
programowania liniowego nazywane jest każde
rozwiązanie optymalne, które jest
współrzędnymi jednego z wierzchołków
zbioru dopuszczalnego D.
Każde inne rozwiązanie optymalne nazywane
jest
rozwiązaniem niewierzchołkowym
zadania programowania liniowego.
36
Czy każde ZPL ma rozwiązanie?
1. Tak, jeżeli zbiór rozwiązań dopuszczalnych D jest
zbiorem ograniczonym tzn. punktem, odcinkiem,
wielokątem wypukłym, wielościanem wypukłym lub
n-wymiarowym „wielościanem”.
2. Może nie mieć, jeżeli zbiór rozwiązań
dopuszczalnych D jest zbiorem nieograniczonym
tzn. półprostą, nieograniczonym wypukłym
podzbiorem płaszczyzny lub przestrzeni n-
wymiarowej (n>3), którego krawędzie są półprostymi
i ewentualnie odcinkami. W takim przypadku nie
istnieje maksimum (tzn. funkcja celu dąży do +∞)
albo minimum (tzn. funkcja celu dąży do -∞).
3. Nie, jeżeli zbiór rozwiązań dopuszczalnych D jest
zbiorem pustym.
37
Ile rozwiązań może mieć ZPL?
1. Zero - zawsze gdy zbiór dopuszczalny jest
pusty oraz dla niektórych zbiorów
nieograniczonych (wtedy funkcja celu dąży do
+∞ albo -∞ )
2. Jedno - gdy zbiór dopuszczalny jest niepusty.
3. Nieskończenie wiele - gdy zbiór dopuszczalny
jest niepusty.
38
Wnioski z twierdzenia
o rozwiązaniach optymalnych ZPL
W praktyce powyższe twierdzenie oznacza, że
aby
znaleźć rozwiązanie ZPL, trzeba sprawdzić wartości
funkcji celu jedynie dla współrzędnych każdego z
wierzchołków zbioru dopuszczalnego D tzn.
podstawić współrzędne wierzchołków zbioru
dopuszczalnego D do funkcji celu i sprawdzić, dla
którego z wierzchołków zostanie osiągnięte
maksimum lub minimum.
Takie sprawdzanie może jednak zawieść w przypadku
gdy zbiór dopuszczalny jest nieograniczony, a funkcja
celu dąży do +∞ albo -∞. Metody obliczeniowe
używane w praktyce pozwalają jednak na wykrycie
takiej sytuacji. Ponadto, poprawnie przygotowane
modele rzeczywistych sytuacji decyzyjnych niemal
nigdy nie mają nieskończonego max/min.
39
Przykład sprawdzania
dopuszczalności rozwiązań ZPL (1)
max
10
4
2
1
→
+
x
x
przy ograniczeniach
23
10
5
,
3
2
1
≤
+
x
x
2
1
≤
x
0
1
≥
x
,
0
2
≥
x
1
x
,
2
x
-całkowite
Zbiór dopuszczalny
to czworokąt
o wierzchołkach:
(0,0), (2,0), (0;2,3)
oraz (2;1,6).
Podstawienie do warunków ograniczających
A(0,0)
23
0
0
10
0
5
,
3
≤
=
⋅
+
⋅
,
2
0 ≤
,
0
0 ≥
,
0
0 ≥
dopuszcz.
B(0,8;1,5)
23
8
,
17
5
,
1
10
8
,
0
5
,
3
≤
=
⋅
+
⋅
,
2
8
,
0
≤
,
0
8
,
0 ≥
,
0
5
,
1 ≥
dopuszcz.
C(1;2)
23
5
,
23
2
10
1
5
,
3
>
=
⋅
+
⋅
,
2
8
,
0
≤
,
0
8
,
0 ≥
,
0
5
,
1 ≥
nie jest dopuszcz.
x
2
x
1
0
1
2
3
1
2
3
A
D
G
E
B
C
F
H
40
Przykład sprawdzania
dopuszczalności rozwiązań ZPL (2)
max
10
4
2
1
→
+
x
x
przy ograniczeniach
23
10
5
,
3
2
1
≤
+
x
x
2
1
≤
x
0
1
≥
x
,
0
2
≥
x
1
x
,
2
x
-całkowite
Podstawienie do warunków ograniczających
D(1,8;1
3
2
)
23
23
1
10
8
,
1
5
,
3
3
2
≤
=
⋅
+
⋅
,
2
8
,
1 ≤
,
0
8
,
1 ≥
,
0
1
3
2
≥
dopuszcz.
E(2;2)
23
27
2
10
2
5
,
3
>
=
⋅
+
⋅
,
2
8
,
0
≤
,
0
8
,
0 ≥
,
0
5
,
1 ≥
nie jest dopuszcz.
F(2;1,6)
23
23
5
10
2
5
,
3
≤
=
⋅
+
⋅
,
2
8
,
0
≤
,
0
8
,
0
≥
,
0
5
,
1 ≥
dopuszcz.
G(2,5;0,8)
23
75
,
16
8
,
0
10
5
,
2
5
,
3
≤
=
⋅
+
⋅
,
2
5
,
2
>
nie jest dopuszcz.
H(-0,2;1,1)
23
23
5
10
2
5
,
3
≤
=
⋅
+
⋅
,
2
8
,
0
≤
,
0
2
,
0
<
−
nie jest dopuszcz.
x
2
x
1
0
1
2
3
1
2
3
A
D
G
E
B
C
F
H
41
Programowanie liniowe
Rozwiązywanie zadań (1)
Rozwiązywanie zadań programowania
liniowego
nie może być oparte o
obliczanie pochodnych, ponieważ
pochodna funkcji celu po każdej ze
zmiennych jest stałą liczbą, a zatem nie
ma sensu przyrównywanie jej do zera.
42
Programowanie liniowe
Rozwiązywanie zadań (2)
Zadania programowania liniowego z 2
zmiennymi decyzyjnymi można
rozwiązywać przy pomocy tzw.
metody
graficznej. Zostanie ona przedstawiona
później w celu zilustrowania pewnych
charakterystycznych własności
programowania liniowego.
43
Programowanie liniowe
Rozwiązywanie zadań (3)
Uniwersalną metodą rozwiązywania zadań
programowania liniowego jest
algorytm
simpleks (metoda simpleks). Nie będziemy
go jednak omawiać, ponieważ jest on bardzo
pracochłonny, a osoby używające w praktyce
programowania liniowego mają do dyspozycji
bardzo wiele programów komputerowych,
które wykonają niezbędne obliczenia.
44
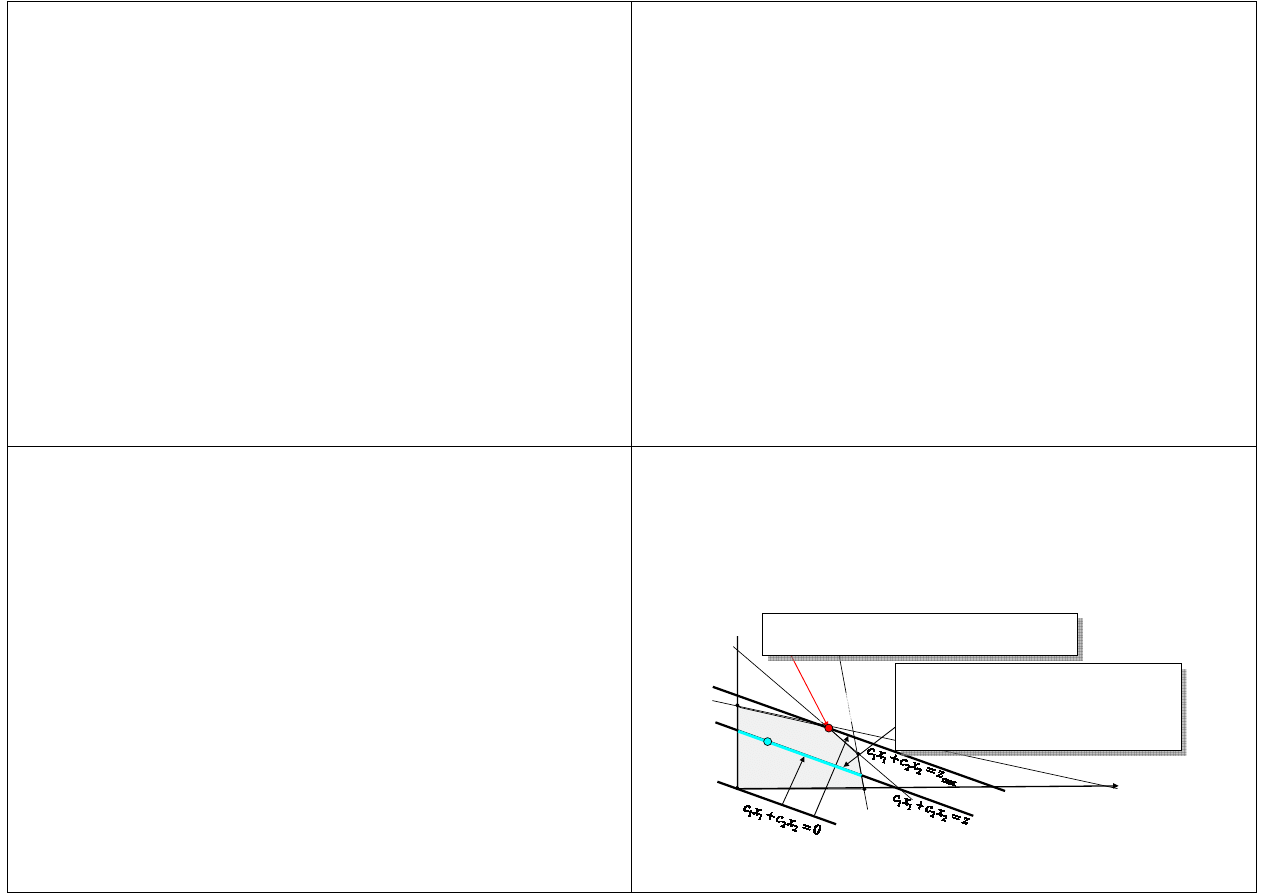
Metoda graficzna rozwiązywania
zadania programowania liniowego
Przykład
Zadanie z maksymalizacją funkcji celu (wszystkie
współczynniki funkcji celu i ograniczeń są dodatnie)
x
1
x
2
D
)
,
(
*
2
*
1
x
x
)
,
(
2
1
X
X
Dla współrzędnych tego punktu funkcja
celu osiąga maksimum równe z
max
.
Niebieski odcinek jest geometryczną re-
prezentacją wszystkich par liczb X
1
, X
2
należących do zbioru dopuszczalnego
D, dla których, po ich podstawieniu do
funkcji celu, przyjmie ona wartość
z
.
45
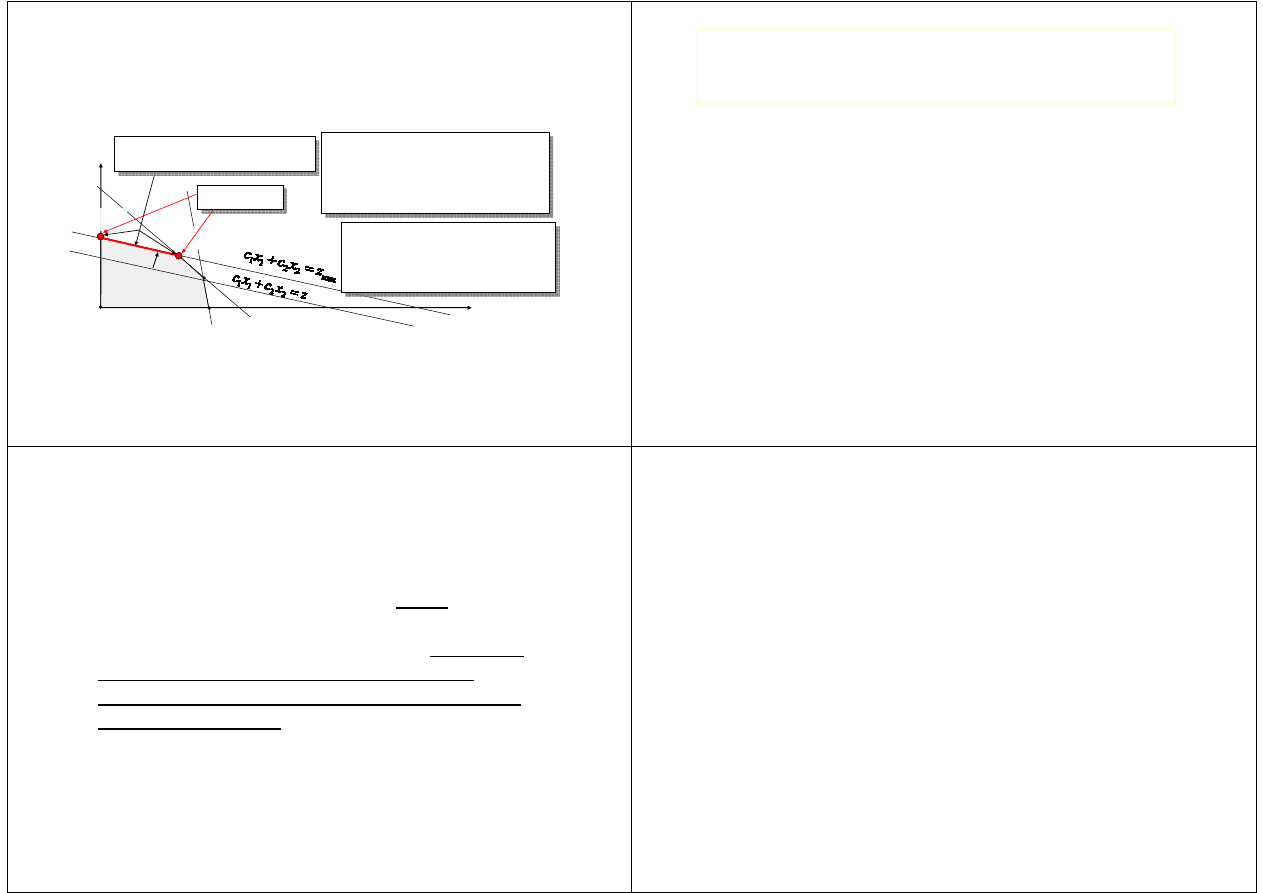
Rozwiązania wielokrotne zadania
programowania liniowego
Przykład
Funkcja celu osiąga maksimum również dla współrzędnych wszystkich
punktów odcinka o końcach
)
,
(
*
21
*
11
*
1
x
x
x =
oraz
)
,
(
*
22
*
12
*
2
x
x
x =
.
x
1
x
2
D
)
,
(
*
21
*
11
x
x
)
,
(
*
22
*
12
x
x
Zbiór rozwiązań wielokrotnych
(geometr. jest to odcinek)
Rozwiązania wielokrotne.
Przypadek n=2 (2 zmienne decy-
zyjne) dla standardowej postaci
zadania programowania liniowego
z dodatnimi parametrami.
Rozwiązania
wierzchołkowe
Dla współrzędnych punktów
)
,
(
*
21
*
11
*
1
x
x
x =
oraz
)
,
(
*
22
*
12
*
2
x
x
x =
funkcja celu osiąga maksimum
tzn.
max
*
22
2
*
12
1
*
21
2
*
11
1
z
x
c
x
c
x
c
x
c
=
+
=
+
.
46
Twierdzenie o kształcie zbioru
rozwiązań wielokrotnych ZPL (1)
Zbiór wszystkich rozwiązań wielokrotnych ZPL może
mieć następującą postać geometryczną
• dla n=2 - odcinek
• dla n=3 - wielokąt wypukły lub odcinek
• dla n>3 – co najwyżej (n-1)-wymiarowy „wielościan”
wypukły, wielokąt wypukły lub odcinek.
47
Twierdzenie o kształcie zbioru
rozwiązań wielokrotnych ZPL (2)
Jeżeli
zbiór dopuszczalny D jest nieograniczony, to
zbiór rozwiązań wielokrotnych może mieć postać
zbioru nieograniczonego o wymiarze co najwyżej o
1 mniejszym niż liczba zmiennych n: półprostej,
nieograniczonego podzbioru płaszczyzny/
przestrzeni, którego krawędziami są półproste i
ewentualnie odcinki,.
Przypadki te są jednak
nieistotne z praktycznego
punktu widzenia, ponieważ modele dla realnych
sytuacji decyzyjnych w zasadzie nigdy nie mają
rozwiązań o takiej postaci.
48
Rozwiązania wielokrotne zadania
programowania liniowego a
oprogramowanie optymalizacyjne
W przypadku, gdy istnieją rozwiązania wielokrotne
zadania programowania liniowego, wiele
programów komputerowych, w tym dodatek do
Excela o nazwie Solver niestety nie pokazuje
wszystkich rozwiązań „wierzchołkowych”, a
jedynie jedno z nich.
Można co prawda stwierdzić, że rozwiązania
alternatywne istnieją, ale wszelkie metody
postępowania, które to umożliwiają, są dość
niewygodne w użyciu.
49
Wykład 1
Część 3
Programowanie liniowe:
Wybór optymalnego planu
(asortymentu) produkcji przy
ograniczonej dostępności
ś
rodków produkcji
50
Wybór optymalnego planu produkcji –
sformułowanie słowne (1)
Firma może produkować n rodzajów wyrobów.
Zakładamy, że wszystkie wyprodukowane wyroby
zostaną sprzedane i to ze stałymi zyskami
jednostkowymi (tzn. nie zależącymi od wielkości
produkcji/sprzedaży). Do produkcji wyrobów
zużywanych jest m różnych rodzajów środków
produkcji (surowce, energia, maszyny, siła
robocza, powierzchnia magazynowa etc.),
dostępnych w ograniczonych ilościach w
pewnym ustalonym okresie czasu.
51
Wybór optymalnego planu produkcji –
model ogólny - sformułowanie słowne (2)
Należy określić, które wyroby i w jakich ilościach
produkować, aby nie przekraczając posiadanych
zasobów środków produkcji, zmaksymalizować
zysk ze sprzedaży tychże wyrobów w pewnym
ustalonym okresie czasu.
52
Wybór optymalnego planu produkcji –
parametry modelu (1)
Dane są:
•
- jednostkowe zużycie i-tego środka produkcji
tzn. ilość tego środka zużywana na wytworzenie
jednej jednostki j-tego wyrobu, liczona np. w
g/kg, mg/l, kg/m
3
, kWh/t, h/t itp.
(i=1,...,m; j = 1,...,n);
•
- maksymalne dostępne zasoby i-tego środka
produkcji w rozważanym okresie czasu, liczone
np. w kg, l, hl, t, m
2
, m
3
, m (i=1,...,m);
ij
a
i
b
53
Wybór optymalnego planu produkcji –
parametry modelu (2)
•
- zysk jednostkowy dla wyrobu j-tego rodzaju
tzn. zysk pochodzący ze sprzedaży jednej
jednostki wyrobu, liczony w PLN/m, PLN/kg,
PLN/m
3
, PLN/t itp. (zamiast PLN może być
oczywiście dowolna inna waluta, ale dla
wszystkich wyrobów jednakowa) (j = 1,...,n).
j
c
54
Wybór optymalnego planu produkcji –
zmienne decyzyjne
Zmiennymi decyzyjnymi w tym zagadnieniu są
wielkości produkcji i sprzedaży wyrobów:
•
- wielkość produkcji j-ego wyrobu liczona np.
w kg, l, hl, t, m
3
,m
2
, m, szt. (naturalnie wyroby
różnych rodzajów mogą być liczone w różnych
jednostkach np. niektóre w kg a inne w litrach).
j
x
55
Wybór optymalnego planu produkcji –
ogólny model matematyczny
max
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
- łączny zysk ze sprzedaży wyrobów
przy ograniczeniach
rzeczywiste zużycie
maksymalne dostępne zasoby
środków produkcji
środków produkcji
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
≤
+
+
+
2
2
2
22
1
21
...
b
x
a
x
a
x
a
n
n
≤
+
+
+
M M
m
n
mn
m
m
b
x
a
x
a
x
a
≤
+
+
+
...
2
2
1
1
0
1
≥
x
,
0
2
≥
x
,....,
0
≥
n
x
ilości wyrobów nie mogą być ujemne
56
Programowanie liniowe -
wybór optymalnego planu produkcji
57
Wybór optymalnego planu produkcji – uwagi:
wielkość produkcji a wielkość sprzedaży
W modelu występuje założenie
wielkość produkcji =
wielkość sprzedaży (zmienne decyzyjne w
funkcji celu oznaczają de facto wielkości
sprzedaży natomiast w warunkach
ograniczających - wielkości produkcji).
W rzeczywistości albo:
wszystkich wyprodukowanych wyrobów nie
uda się sprzedać (zatem te niesprzedane nie
przynoszą zysku)
albo:
produkcja jest realizowana w ramach
konkretnych zamówień, które nie muszą się
pokrywać z wyliczonym, optymalnym (tzn.
maksymalizującym zysk)
planem produkcji.
58
Istnienie rozwiązania dla zadania
optymalnego planu produkcji
Rozważany model wyboru planu produkcji
gwarantuje
istnienie rozwiązania
optymalnego dla dowolnych realistycznych
parametrów tzn.
nieujemnych , dodatnich (wartości
parametrów funkcji celu nie mają znaczenia ).
Jest tak, ponieważ dla parametrów takich jak
wyżej zbiór rozwiązań dopuszczalnych jest
niepusty
ij
a
i
b
j
c
59
Wybór optymalnego planu produkcji
a kwestia podzielności wyrobów
Jeżeli choć
jeden z rodzajów wyrobów musi być (ze
względu na swoją niepodzielność, np. jest to
urządzenie, maszyna, produkt odzieżowy itp.)
liczony w
sztukach, to wtedy może być konieczne dodanie
warunków całkowitoliczbowości zmiennej/ych,
ponieważ nie ma żadnej gwarancji, że rozwiązanie
przyjmie wartości całkowitoliczbowe.
Oznacza to, że rozważane zadanie stanie się
zadaniem
tzw. liniowego programowania całkowitoliczbowego.
Niepodzielność wyrobów występuje częściej niż to się
na pozór wydaje, ponieważ nawet wyroby podzielne (np.
soki, sery, proszek do prania) z reguły są pakowane w
niepodzielne opakowania o ustalonych rozmiarach
60
Wybór optymalnego planu produkcji
a postać standardowa ZPL
Ogólne wzory dla zadania wyboru
optymalnego planu (asortymentu)
produkcji
są identyczne jak podana
wcześniej
postać standardowa zadania
programowania liniowego dla
maksymalizacji.
Wykład 1
Część 4
Programowanie liniowe:
zadanie optymalnej diety
62
Wybór optymalnej diety –
sformułowanie słowne
Zakładamy, że w pewnym ustalonym okresie
czasu (najczęściej 1 dnia) należy spożyć
co
najmniej minimalne wymagane ilości m
różnych
składników odżywczych (takich jak
białko, węglowodany, tłuszcze, witaminy, sole
mineralne itp. a także odpowiednią ilość kalorii)
zawartych w dostępnych produktach n
rodzajów.
Zakładamy ponadto, że
koszty jednostkowe
produktów
są stałe i nie zależą od wielkości
zakupu a
ilość zakupiona = wielkość
spożycia.
63
Wybór optymalnej diety –
sformułowanie słowne cd.
Należy zaplanować, które produkty spożywcze
i w jakich ilościach należy zakupić aby
zminimalizować łączne koszty ich zakupu w
rozważanym okresie,
dostarczając przy tym co
najmniej tyle składników odżywczych, ile
wymagają normy.
64
Wybór optymalnej diety –
parametry modelu
•
ij
a
- zawartość i-tego składnika
odżywczego na jednostkę j-tego
produktu np. ilość gramów białka na kg
kiszonki w mieszance paszowej, gramów
węglowodanów na kg dżemu, dekagra-
mów tłuszczu na kg mięsa, miligramów
witaminy C na litr soku itp. (czyli
zawartości te są liczone w takich
jednostkach jak g/kg, dag/kg, mg/l,
kcal/kg) (i= 1,...,m; j = 1,...,n);
65
Wybór optymalnej diety –
parametry modelu c.d.
•
i
b
- minimalne wymagane spożycie i-tego
składnika odżywczego w rozważanym
okresie (liczone w takich jednostkach jak mg,
g, kg, ml, l, cm
3
, kcal) (i=1,...,m);
•
j
c
- cena jednostkowa dla j-tego
produktu (j = 1,...,n) (liczona w PLN/l,
PLN/kg, PLN/m
3
, PLN/t itp. – zamiast PLN
może być oczywiście dowolna inna waluta, ale
dla wszystkich produktów jednakowa).
66
Wybór optymalnej diety –
zmienne decyzyjne
Zmiennymi decyzyjnymi w tym zagadnieniu są
ilości produktów spożywczych:
•
-
wielkość zakupu (i spożycia) j-ego
produktu spożywczego.
j
x
67
Wybór optymalnej diety –
ogólny model matematyczny
min
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
łączny koszt zakupu produktów
przy ograniczeniach
rzeczywiste spożycie
minimalne wymagane spożycie
składników odżywczych
składników odżywczych
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
≥
+
+
+
2
2
2
22
1
21
...
b
x
a
x
a
x
a
n
n
≥
+
+
+
M
M
m
n
mn
m
m
b
x
a
x
a
x
a
≥
+
+
+
...
2
2
1
1
0
1
≥
x
,
0
2
≥
x
,....,
0
≥
n
x
ilości produktów nie mogą być
ujemne
68
Programowanie liniowe -
wybór optymalnej diety
Wybór optymalnej (najtańszej) diety - model ogólny
Wyboru diety można dokonać zakupując niektóre lub wszystkie spośród
n różnych dostępnych produktów spożywczych.
…
?
1
x
kg
?
2
x
kg
?
3
x
kg
?
4
x
l
…
?
n
x
kg
69
Wybór optymalnej diety – aspekty
praktyczne żywienia ludzi
Choć nie ma to znaczenia z punktu widzenia
złożoności obliczeń, z praktycznego punktu
widzenia ten model jest stosowany raczej do
układania planów żywienia dla zwierząt niż
dla ludzi, a to ze względu na
pominięcie
kwestii walorów smakowych oraz nieuchronną
monotonię tak ułożonej diety.
70
Czy zadanie optymalnej diety ma
zawsze rozwiązanie?
Zadanie optymalnej diety w podanej wyżej
(„podręcznikowej”)
postaci (tzn. wyłącznie z
dolnymi limitami spożycia składników), gdzie
parametry , , są dodatnie (ewentualnie
niektóre mogą wynosić 0, jeżeli składnik i
nie jest zawarty w produkcie j)
ma zawsze
rozwiązanie.
Rozwiązanie to jednak
może mieć znaczne
przekroczone minimalne limity spożycia dla
niektórych składników.
ij
a
i
b
j
c
ij
a
71
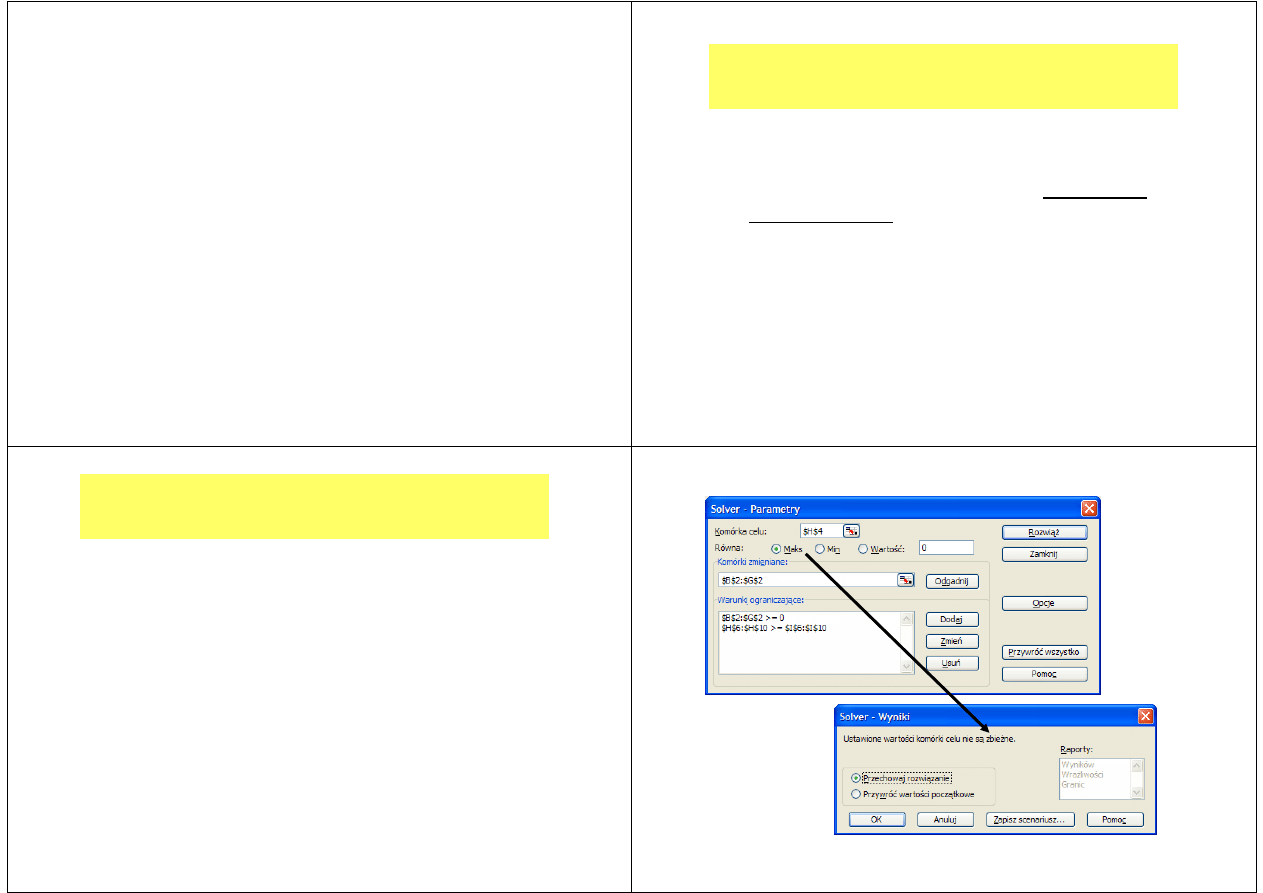
Czy w zadaniu optymalnej diety
istnieje maksimum funkcji celu?
Zadanie optymalnej diety w wersji tylko z dolnymi
limitami spożycia składników jest przykładem
zadania, w którym
nie istnieje maksimum funkcji
celu (alternatywnie można powiedzieć, że
maksimum to wynosi „plus nieskończoność”).
Konsekwencją tego faktu jest np. komunikat błędu
przy rozwiązywaniu zadania Solverem, jeśli parametr
„Równa” jest ustawiony omyłkowo na Maks zamiast
na Min
72
73
Wybór optymalnej diety –
przekroczenie spożycia składników
Jak już wspomniano wcześniej najtańsza
dieta może mieć znacznie przekroczone
spożycie niektórych składników. Wynika
stąd, iż
„realne” zadanie optymalnej diety
powinno uwzględnić nie tylko minimalne
wymagane spożycie składników, ale
także
maksymalne dopuszczalne ze względów
zdrowotnych spożycie składników
(zasada „co za dużo to niezdrowo”).
74
Wybór optymalnej diety – rozszerzenie
modelu o górne normy spożycia
Jeżeli istnieją górne normy zawartości składników
i
d
to
do zadania należy dołączyć następującą grupę warunków
ograniczających:
rzeczywiste spożycie
maks.dopuszczalne spożycie
składników odżywczych składników odżywczych
1
1
2
12
1
11
...
d
x
a
x
a
x
a
n
n
≤
+
+
+
2
2
2
22
1
21
...
d
x
a
x
a
x
a
n
n
≤
+
+
+
M
M
m
n
mn
m
m
d
x
a
x
a
x
a
≤
+
+
+
...
2
2
1
1
75
min
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
- łączny koszt zakupu produktów
przy ograniczeniach
rzeczywiste spożycie
minimalne wymagane spożycie
składników odżywczych
składników odżywczych
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
≥
+
+
+
M
M
m
n
mn
m
m
b
x
a
x
a
x
a
≥
+
+
+
...
2
2
1
1
rzeczywiste spożycie
maksymalne dopuszczalne spożycie
składników odżywczych
składników odżywczych
1
1
2
12
1
11
...
d
x
a
x
a
x
a
n
n
≤
+
+
+
M
M
m
n
mn
m
m
d
x
a
x
a
x
a
≤
+
+
+
...
2
2
1
1
0
1
≥
x
,
0
2
≥
x
,....,
0
≥
n
x
ilości produktów
nie mogą być ujemne
Wybór optymalnej diety –
ogólny model matematyczny z dolnymi i
górnymi normami spożycia
76
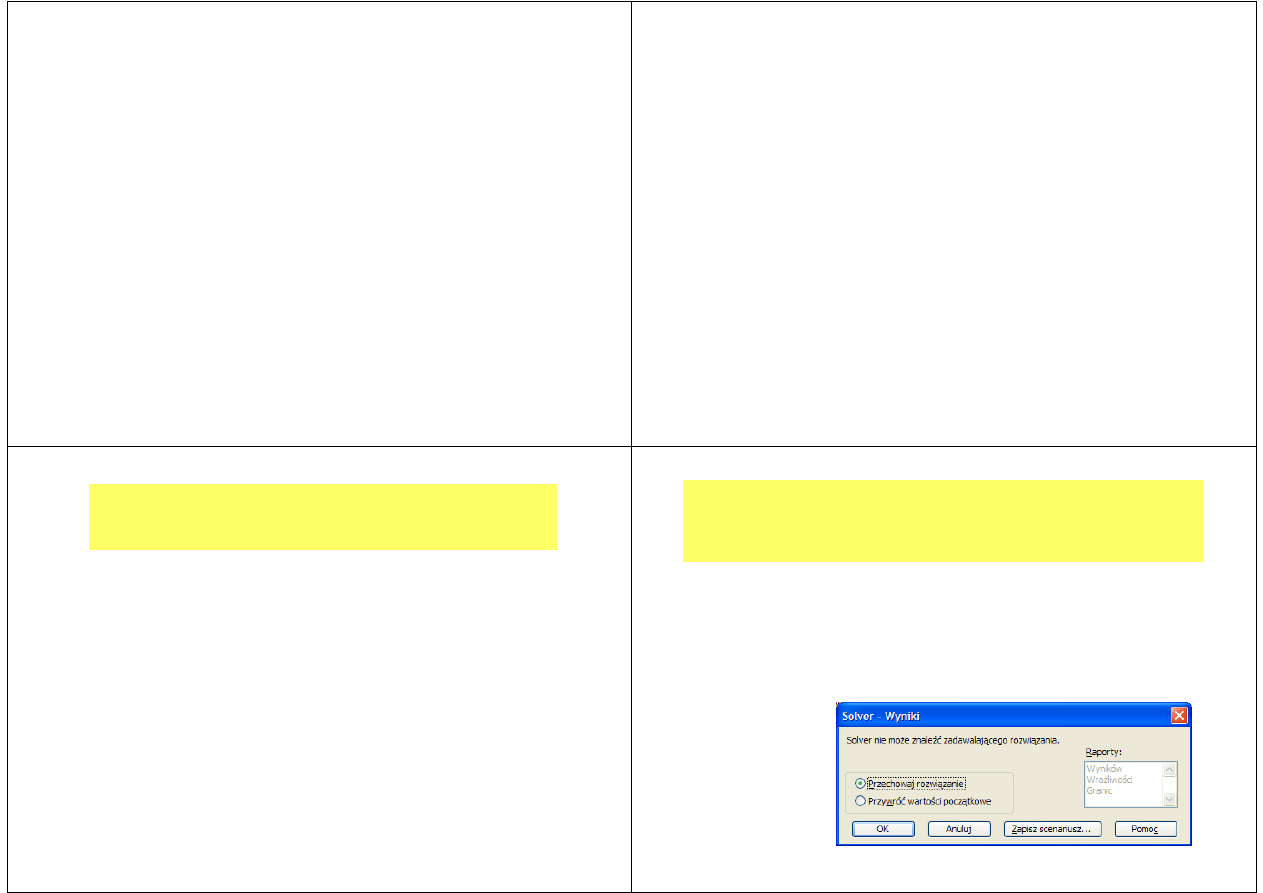
Czy zadanie optymalnej diety z górnymi
normami spożycia składników ma
zawsze rozwiązanie?
Nie, ponieważ warunki ograniczające z górnymi i
dolnymi limitami (normami) mogą się okazać
sprzeczne, zwłaszcza jeżeli do stworzenia diety
użyte są produkty o mało zróżnicowanym
składzie.
Próba rozwiązania w Excelu skutkuje następującym
komunikatem:
77
Wybór optymalnej diety –
uwagi historyczne
Zadanie optymalnej diety jest historycznie rzecz biorąc
jednym z pierwszych modeli programowania
liniowego zastosowanym w praktyce. Co ciekawe,
zostało ono pierwotnie użyte do ułożenia diety dla
ludzi.
Rozwiązanie przy pomocy metody simpleks
zadania
optymalnej diety z:
•
77 zmiennymi (n=77 - wybór dotyczył 77 produktów
spożywczych),
•
9 ograniczeniami funkcyjnymi (m=9 -
uwzględniono
9 składników odżywczych)
zajęło
jesienią 1947 roku:
78
Wybór optymalnej diety –
uwagi historyczne c.d.
10 pracownikom korzystającym z
mechanicznych kalkulatorów
łączny czas
120 roboczodniówek czyli ok. 1000 godzin.
79
Wybór optymalnej diety –
uwagi historyczne
80
Wybór optymalnej diety –
uwagi historyczne
Wykład 1
Część 5
Programowanie liniowe:
zadanie optymalnej mieszanki
(ang. blending problem)
82
Programowanie liniowe -
zadanie optymalnej mieszanki
Model matematyczny identyczny jak w zadaniu
optymalnej diety może również być użyty przy
wyborze najtańszej mieszanki „docelowej”
dowolnych substancji (niekoniecznie produktów
spożywczych) spełniającej dolne i ewentualnie
górne normy zawartości składników.
Substancje te są dalej nazywane roboczo
mieszankami „składowymi”, czyli jednorodnymi
mieszaninami związków chemicznych i/lub
pierwiastków (przykładem są produkty spożywcze
w zadaniu optymalnej diety).
83
Programowanie liniowe -
zadanie optymalnej mieszanki
Zadanie optymalnej mieszanki może być również
sformułowane w taki sposób, że zarówno:
•
zawartości składników w mieszankach
„składowych”
jak i
•
wymagane ilości składników zawartych w
mieszance „docelowej”
mogą być wyrażone nie w liczbach bezwzględnych,
ale
w procentach.
Funkcja celu oznacza wtedy łączny koszt jednej
jednostki mieszanki „docelowej”.
84
Zadanie optymalnej mieszanki (podejście
„procentowe”) – sformułowanie słowne
Należy zaplanować, które mieszanki
„składowe” i w jakich ilościach (lub
udziałach procentowych) należy zakupić
aby
zminimalizować łączny koszt 1
jednostki mieszanki „docelowej”,
zapewniając przy tym, że
zawartości
składników w mieszance „docelowej” będą
takie jak przewidują wymagania (dolne lub
górne normy). Ponadto, ilości mieszanek
„składowych” muszą się sumować do 1
jednostki (np. do 1 kilograma), w której to
jednostce są mierzone zarówno mieszanki
„składowe” jak i mieszanka „docelowa”.
85
Model matematyczny dla zadania optymalnej
mieszanki (podejście „procentowe”) - parametry
•
-
zawartość procentowa i-tego składnika w j-
tej mieszance „składowej” (i= 1,...,m; j = 1,...,n) –
ilość procent każdego ze składników zawartych w
mieszance „składowej”.
Ilości „procentowe” są
liczbowo równe ilości dag składnika na kg
mieszanki „składowej” (dag/kg) albo centylitrów
składnika na litr mieszanki „składowej” (cl/l, cl –
centylitr=0,01 litra), oczywiście pod warunkiem, że
jednostkami, w których liczone są mieszanki
„składowe” są odpowiednio kilogramy czy litry.
ij
a
86
Model matematyczny dla zadania optymalnej
mieszanki (podejście „procentowe”) –
parametry cd.
•
-
minimalne wymagane/maksymalne
dopuszczalne zawartości procentowe i-tego
składnika w mieszance „docelowej”
(i=1,...,m). Są one liczbowo równe wymaganej
liczbie dag czy cl przypadającej na kg/litr
mieszanki „docelowej”.
•
-
cena jednostkowa dla j-tej mieszanki
„składowej” (j = 1,...,n), liczona np. w PLN/l,
PLN/kg, PLN/m
3
, PLN/t itp. – zamiast PLN może
być oczywiście dowolna inna waluta, ale dla
wszystkich mieszanek „składowych” jednakowa.
i
i
d
b
/
j
c
87
Model matematyczny dla zadania optymalnej
mieszanki (podejście „procentowe”) –
zmienne decyzyjne
Zmiennymi decyzyjnymi są ilości mieszanek
składowych:
•
- ilość j-tej mieszanki „składowej” liczona np.
w kg (po przemnożeniu przez 100% ilość ta jest
równa udziałowi procentowemu j-tej mieszanki
„składowej” w mieszance „docelowej”).
j
x
88
Zadanie optymalnej mieszanki (podejście
„procentowe”) - model matematyczny (1)
min
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
łączny koszt 1 jedn. (np. kg, l, t) mieszanki „docelowej”
przy ograniczeniach
rzeczywiste % zawart. składn. minimalne wymagane % zawart.
w mieszance „docelowej” składn.w mieszance „docelowej”
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
≥
+
+
+
M
M
m
n
mn
m
m
b
x
a
x
a
x
a
≥
+
+
+
...
2
2
1
1
rzeczywiste % zawart. składn maksymalne dopuszczalne zawart.
w mieszance „docelowej”
składn.w mieszance „docelowej”
1
1
2
12
1
11
...
d
x
a
x
a
x
a
n
n
≤
+
+
+
M
M
m
n
mn
m
m
d
x
a
x
a
x
a
≤
+
+
+
...
2
2
1
1
89
Zadanie optymalnej mieszanki (podejście
„procentowe”) - model matematyczny (2)
1
...
2
1
=
+
+
+
n
x
x
x
ilości mieszanek „składowych”
muszą się sumować do 1 (1 jednostki mieszanki
„docelowej”)
0
1
≥
x
,
0
2
≥
x
,....,
0
≥
n
x
ilości mieszanek „składowych”
nie mogą być ujemne.
90
Parametry
i
b
mogą również w szczególności
oznaczać dokładne procentowe zawartości
składników w mieszance docelowej.
Jeżeli wszystkie procentowe zawartości składników
w mieszance docelowej mają postać równości, to
model matematyczny przybiera wtedy postać
podaną na następnym slajdzie.
Zadanie optymalnej mieszanki (podejście
„procentowe”) - „dokładne” normy
zawartości składników
91
Zadanie optymalnej mieszanki (podejście
„procentowe”) - model matematyczny:
„dokładne” normy zawartości składników
min
...
2
2
1
1
→
+
+
+
n
n
x
c
x
c
x
c
łączny koszt 1 jedn. (np. kg, l, t) mieszanki „docelowej”
przy ograniczeniach
rzeczywiste zawartości
wymagane zawartości
składników w mieszance
składników w mieszance
„docelowej”
„docelowej”
1
1
2
12
1
11
...
b
x
a
x
a
x
a
n
n
=
+
+
+
M
M
m
n
mn
m
m
b
x
a
x
a
x
a
=
+
+
+
...
2
2
1
1
1
...
2
1
=
+
+
+
n
x
x
x
ilości mieszanek „składowych” muszą
się sumować do 1 (1 jednostki mieszanki „docelowej”)
0
1
≥
x
,
0
2
≥
x
,....,
0
≥
n
x
ilości mieszanek „składowych” nie
mogą być ujemne.
92
Jeżeli parametry
ij
a
i
i
b
opisują „pełne”
zawartości mieszanek składowych i docelowej
tzn. opisują zawartości wszystkich ich
składników, co matematycznie można zapisać
jako:
1
1
=
∑
=
m
j
ij
a
oraz
1
1
=
∑
=
m
j
j
b
albo równoważnie:
%
100
1
=
∑
=
m
j
ij
a
oraz
%
100
1
=
∑
=
m
j
j
b
Zadanie optymalnej mieszanki (podejście
„procentowe”) z „dokładnymi” normami
zawartości składn. – uwagi (1)

93
Zadanie optymalnej mieszanki (podejście
„procentowe”) z „dokładnymi” normami
zawartości składn. – uwagi (2)
a warunki ograniczające związane z zawartością
składników mają postać równości, to wtedy
można zrezygnować z warunku
1
...
2
1
=
+
+
+
n
x
x
x
ponieważ warunki związane z zawartością
gwarantują jego spełnienie.
94
Zadanie optymalnej mieszanki (podejście
„procentowe”) – zadanie przykładowe
Należy wymieszać ze sobą 6 stopów ołowiu, cynku i cyny o ró-
żnych zawartościach składników i cenach za kg tak, aby
otrzymać nowy stop o zadanym składzie procentowym i jak
najniższej cenie za kg. Dane liczbowe są zawarte w tabeli.
Stopy „składowe”
S1 S2 S3 S4 S5 S6
Ceny jednostko-
we stopów
„składowych”
(PLN/kg)
5,50 5,70 5,80 6,00 6,10 5,30
Składniki stopów
Zawartości składników w sto-
pach „składowych”(w % lub
alternatywnie w dag/kg)
Zawartość
składników
w stopie
„docelowym”
(w % lub
alternatywnie
w dag/kg)
ołów (Pb)
33
28 40
50 20
20
30
cynk (Zn)
17
30 50
20 49
50
30
cyna (Sn)
50
42 10
30 31
30
40
95
Zadanie optymalnej mieszanki (podejście
„procentowe”) – zadanie przykładowe:
tworzenie modelu
6
5
4
3
2
1
,
,
,
,
,
x
x
x
x
x
x
- ilości stopów „składowych”
(odpowiednio S1, S2,…,S6) w kg
min
3
,
5
1
,
6
6
8
,
5
7
,
5
5
,
5
6
5
4
3
2
1
→
+
+
+
+
+
x
x
x
x
x
x
-
łączny koszt 1 kg stopu „docelowego
”
przy ograniczeniach
rzeczywiste zawartości
wymagane zawartości składn.
składn. w stopie „docelowym”
w stopie „docelowym”
30
20
20
50
40
28
33
6
5
4
3
2
1
=
+
+
+
+
+
x
x
x
x
x
x
30
50
49
20
50
30
17
6
5
4
3
2
1
=
+
+
+
+
+
x
x
x
x
x
x
40
30
31
30
10
42
50
6
5
4
3
2
1
=
+
+
+
+
+
x
x
x
x
x
x
1
...
6
2
1
=
+
+
+
x
x
x
ilości stopów w sumie wynoszą 1 kg
0
1
≥
x
,
0
2
≥
x
,....,
0
6
≥
x
ilości stopów „składowych”
nie mogą być ujemne.
96
Zadanie optymalnej mieszanki (podejście
„procentowe”) – zadanie przykładowe:
tworzenie modelu
1.Ograniczenie
1
...
6
2
1
=
+
+
+
x
x
x
jest de facto zbędne,
ponieważ dodanie stronami 3 ograniczeń na ilości
składników prowadzi do równoważnej mu równości
100
100
100
100
100
100
100
6
5
4
3
2
1
=
+
+
+
+
+
x
x
x
x
x
x
.
Jest to przypadek zadania, gdy parametry
ij
a
i
i
b
opisują
„pełne” zawartości mieszanek „składowych” (czyli
zawartości wszystkich składników).
2. Funkcja celu „rozpisana” z jednostkami miar to:
6
6
3
,
5
...
2
2
7
,
5
1
1
5
,
5
6
2
1
S
kg
x
S
kg
PLN
S
kg
x
S
kg
PLN
S
kg
x
S
kg
PLN
+
+
+
.
Zatem po „skróceniu” kg stopów „składowych” jednostka
funkcji celu to PLN.
97
Zadanie optymalnej mieszanki (podejście
„procentowe”) – zadanie przykładowe:
tworzenie modelu
3. Procentowy skład stopu „docelowego” to:
30% Pb, 30% Zn i 40% Sn.
W przeliczeniu na jednostki bezwzględne oznacza to, że
1 kg stopu „docelowego” składa się z 30 dag Pb, 30 dag
Zn i 40 dag Sn (czyli
wartości liczbowe w jednostkach
bezwzględnych są takie same jak wartości
procentowe).
Analogicznie, jeżeli chodzi o zawartości składników w
stopach „składowych” to np. 33% zawartości Pb w 1-ym
stopie składowym (S1) oznacza dokładnie to samo co
zawartość 33 dag ołowiu na 1 kg S1.
98
Zadanie optymalnej mieszanki (podejście
„procentowe”) – zadanie przykładowe:
tworzenie modelu
Biorąc pod uwagę w/w rozważania, można „rozpisać”
warunki ograniczające z jednostkami miar (przykładowo
podany jest pierwszy z nich):
Pb
dag
S
kg
x
S
kg
Pb
dag
S
kg
x
S
kg
Pb
dag
S
kg
x
S
kg
Pb
dag
30
6
6
20
...
2
2
28
1
1
33
6
2
1
=
+
+
+
Po „skróceniu” kg stopów „składowych” widać, że obie
strony nierówności wyrażają się w dag składnika
(np.dag Pb). Co ważniejsze jednak, współczynniki w
warunkach ograniczających liczone w dag na kg mają
te same wartości liczbowe co współczynniki
„procentowe”, dlatego też nie wymagają one żadnych
dodatkowych przeliczeń.
99
Zadanie optymalnej mieszanki (podejście
„procentowe”) – zadanie przykładowe:
rozwiązanie
Minimalny koszt 1 kg stopu „docelowego” wynosi 5,474 PLN.
W tym celu należy zmieszać stopy „składowe” w ilościach:
=
*
1
x
0,606 kg (60,6%),
=
*
2
x
0 kg
(0%),
=
*
3
x
0,106 kg (10,6%)
=
*
4
x
0 kg
(0%),
=
*
5
x
0 kg
(0%),
=
*
6
x
0,288 kg (28,8%).
Odpowiada to zawartościom procentowym stopów „składowych”
w stopie „docelowym” w następujących proporcjach: 60,6%
pierwszego, 10,6% trzeciego oraz 28,8% szóstego. Oznacza to
zatem, że mieszanka stopów „składowych” o dowolnej masie
m kg wymieszana w w-w proporcjach będzie miała dla wyma-
ganych procentowych zawartości składników najniższy możliwy
koszt równy 5,474∙m PLN.
Wyszukiwarka
Podobne podstrony:
ZIP BO wyklad2
ZIP BO Lab3 Blad Solvera IntBin
BO cw3, ZiIP, II Rok ZIP, Badania operacyjne
BO cw4, ZiIP, II Rok ZIP, Badania operacyjne
BO 1, ZiIP, II Rok ZIP, Badania operacyjne
choroby wirus i bakter ukł odd Bo
1 bo
BO WYKLAD 03 2
BO W 4
chlamydiofiloza bo i ov
BO I WYKLAD 01 3 2011 02 21
bo mój skrypt zajebiaszczy
BO WYK2 Program liniowe optymalizacja
2 BO 2 1 PP Przykłady Segregator [v1]
PB BO W1
angielski metoda callana nauka jezyka angielskiego zip EVBLJIOGWM2NE5TAUWH2ZYUBEXWFGNHNMOAMXNQ
Odp z BO
więcej podobnych podstron