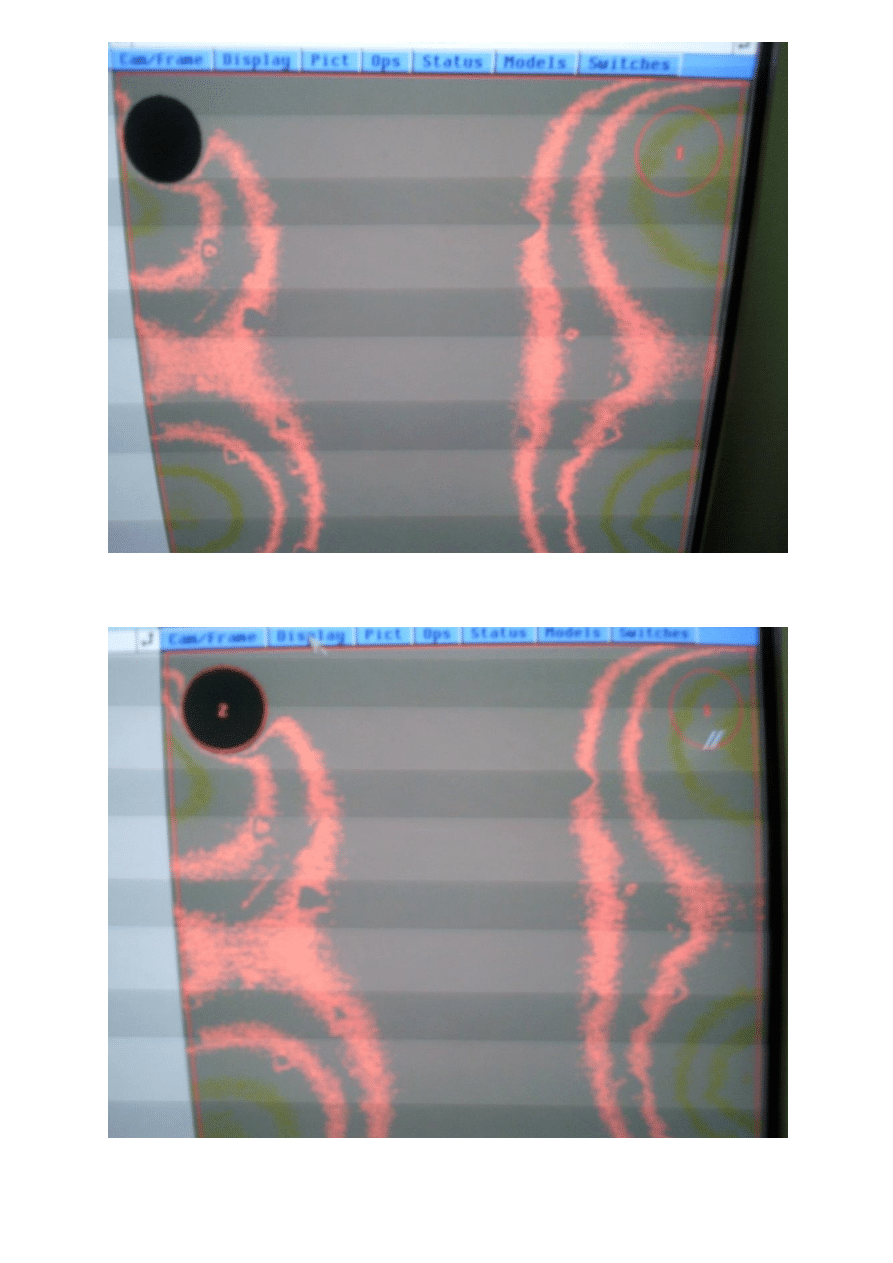
Rys. 1 – Umieszczenie krążka kalibracyjnego w lewym górnym rogu obszaru
widzianego przez kamerę.
Rys. 2 – Po umieszczeniu nad środkiem krążka wskaźnika system wycofał ramię
robota, następnie ponownie wskazał środek krążka. Po dokonaniu niezbędnych
obliczeń robot został ustawiony w pozycji wyjściowej i system zapamiętał pozycje.
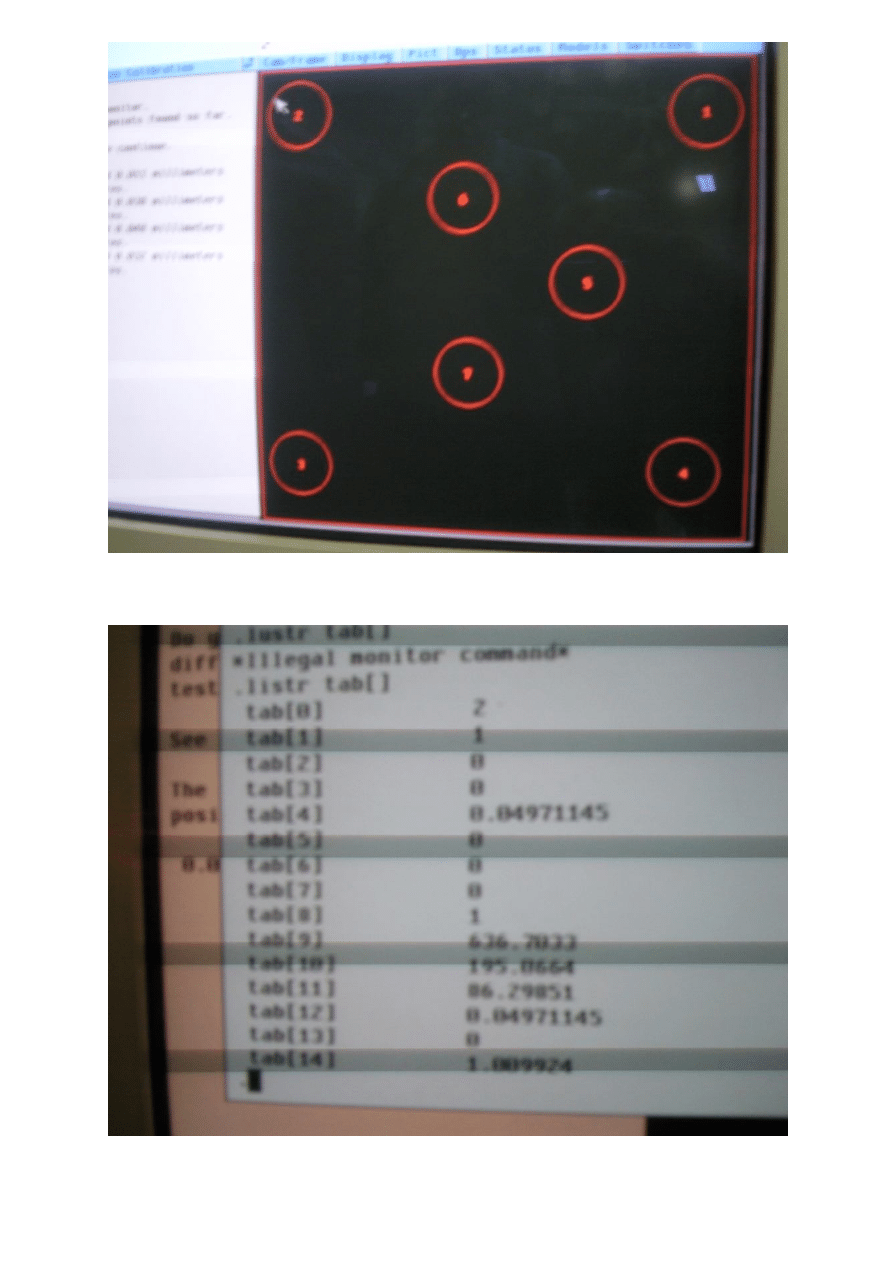
Rys. 3 – W celu jak najdokładniejszego skalibrowania systemu zostało wykonane 7
pomiarów.
Rys. 4 – Dane kalibracyjne uzyskane przy pomocy polecenia VGETCAL.

Kolejne elementy tablicy tab[] odpowiadają następującym parametrom:
0 – status kalibracji: 2-kamera skalibrowana
1 – nr kamery fizycznej: kamera fizyczna nr 1
2 – metoda kalibracji: 0 – kalibracja stacjonarna
3 – parametr nie wykorzystywany
4 i 12– współczynnik skali
8
piksel
mm
: 0,04971145
5 i 6 – wartości muszą być równe 0
7 –kąt obrotu wokół osi x: 0
o
8 – negowanie kątów wizyjnych: 1 – pozostawienie kątów
9 – składowa X: 636,7033
10 – składowa Y: 195,0664
11 – składowa RZ: 86,29851
13 – czy wykorzystano HPS do kalibracji: 0 – nie
14 – współczynnik kształtu (zniekształcenia) piksela X/Y: 1,009924
Wyszukiwarka
Podobne podstrony:
ELEKTRONIKA cw02 id 424650 Nieznany
Cw02 3
Cw02
Cw02 1, Akademia Morska, 1 rok, Fizyka, FIZYKA1, fiza
C16 2005 cw02
C16 2005 cw02
cw02
Cw02 ochrona srodowiska, Ochrona środowiska
cw02 2
instrukcja cw02
ELEKTRONIKA cw02
izs cw02 id 221275 Nieznany
cw02 EE
cw02
pi cw02
cw02
cw02-protokol, Politechnika Wrocławska Energetyka, III semestr, Materiały
Cw02 S WW
cw02 05
więcej podobnych podstron