1
Elementy cyfrowe i układy
logiczne
Wykład 10
2
2
2
2
Uszkodzenia i modele błędów
Legenda
Testowanie układów logicznych
Potrzeba testowania
Generowanie wektorów testowych dla
układów kombinacyjnych
2
3
3
3
3
Potrzeba testowania
Gdy układ logiczny lub system cyfrowy został
wyprodukowany,
wówczas
jest
niezbędne
jego
sprawdzenie w celu wykrycia wad (uszkodzeń), które
mogły powstać podczas jego wytwarzania lub później
podczas transportu i użytkowania.
(Zakładamy, że opis logiczny układu był poprawny, co
stwierdzono przez sprawdzenie za pomocą symulatora
logicznego).
4
4
4
4
Potrzeba testowania – cd.
Testowanie
układów
jest bardzo ważne
i powinno
być
zaplanowane
już
w
początkowym
etapie
projektowania, ponieważ procesy stosowane podczas
wytwarzania układów nie są doskonałe.
Celem
testowania
jest
wykrycie
wad,
tak
aby
uszkodzony układ mógł być zidentyfikowany. Wyniki
testowania mogą być zwrotnie wykorzystane na linii
produkcyjnej w celu poprawienia procesu produkcji.
3
5
5
5
5
Potrzeba testowania – cd.
Co może spowodować defekt układu?
• Układ może mieć fizyczne defekty powstające
podczas wytwarzania. Defekty te mogą zmienić
działanie układu.
• Układ może zostać uszkodzony podczas transportu.
6
6
6
6
Potrzeba testowania – cd.
Testowanie
- poważne wyzwanie intelektualne dla
konstruktorów (duża liczba możliwych uszkodzeń
układu).
Jednym
sposobem
sprawdzenia
działania
obudowanych elementów jest zastosowanie sygnałów
testowych doprowadzonych do zewnętrznych wejść
obudowanego elementu i obserwowanie sygnałów na
jego wyjściach. Jeżeli sygnały wyjściowe różnią się od
oczekiwanych,
to
przyjmujemy,
ż
e
w
układzie
występuje jakieś uszkodzenie lub wystąpił błąd
logiczny w projekcie układu.
4
7
7
7
7
Potrzeba testowania – cd.
Błąd w projekcie może być wykryty za pomocą
symulatora po zastosowaniu odpowiednich
wektorów
testowych
.
Wektory testowe
są tworzone na podstawie funkcji
jaką ma realizować układ. W celu przeanalizowania
występujących
błędów
stosuje
się
odpowiednie
wektory testowe do rozpoznania poszczególnych
błędów w układzie.
Często nie trzeba lokalizować miejsca uszkodzenia,
wystarczy tylko stwierdzenie, że w układzie występuje
usterka (chyba że celem badania są jakieś szczególne
aspekty procesu wytwarzania).
8
8
8
8
Uszkodzenia i modele błędów
Istnieje
wiele
możliwych
rodzajów
uszkodzeń
fizycznych wpływających na działanie układu.
Uszkodzenia
mogą
być
modelowane
z
uwzględnieniem wpływu, jaki mają na działanie
układu.
Modele błędów
Modele błędów
spowodowanych
uszkodzeniami
prowadzącymi
do błędów logicznych
Modele błędów
spowodowanych
uszkodzeniami
parametrycznymi
5
9
9
9
9
Modele błędów logicznych
dotyczą uszkodzeń, które
wpływają
na
funkcję
logiczną
układu
(działanie
funkcjonalne układu).
Modele błędów parametrycznych
dotyczą uszkodzeń,
które wpływają na wartości parametrów układu, takich
jak napięcie, prąd, próg przełączania i opóźnienie.
Błędy logiczne i parametryczne
10
10
10
10
Błąd stałej wartości logicznej
Wiele
błędów
można
modelować
jako
powodujące
występowanie na ścieżce sygnałowej (na wejściu lub wyjściu
bramki) ustalonej wartości logicznej 1 lub ustalonej wartości 0.
Błąd logiczny „
sklejenia z 1
” - uszkodzenie prowadzące do
ustalonej wartości 1 na ścieżce sygnałowej (błąd „stałej 1”:
stuck-at-1, skrótowe oznaczenie s-a-1).
Błąd logiczny „
sklejenia z 0
” - uszkodzenie powodujące
ustaloną wartość 0 (błąd „stałego 0”: stuck-at-0, skrótowe
oznaczenie s-a-0 ).
6
11
11
11
11
Inne rodzaje błędów
Czasami wewnętrzne zwarcie lub rozwarcie może powodować
występowanie ustalonej wartości logicznej 0 lub ustalonej wartości 1
na wyjściu, ale częściej na wyjściu może wystąpić napięcie o
nieokreślonej wartości pośredniej.
12
12
12
12
Inne rodzaje błędów – cd.
Uszkodzenia występujące w układach logicznych CMOS, które nie
mogą być opisane modelem „sklejenia z...", są uszkodzeniami
prowadzącymi do błędów „rozwarcia” (błędy „
stuck open
").
Przy uszkodzeniu powodującym ten błąd, tranzystor zachowuje się
jak obwód trwale rozwarty (duża impedancja). To może powodować,
ż
e na wyjściu przez krótki okres (zwykle kilka milisekund)
występuje poprzednia wartość, gdy oba tranzystory wyjściowe
(push-down, ściągający i pull-up, podciągający) są wyłączane.
7
13
13
13
13
Inne rodzaje błędów – cd.
Uszkodzenie zmostkowania
- zwarcie między dwoma elementami
układu. Jego rzeczywisty wpływ na działanie bramki zależy od
technologii bramki i umiejscowienia zwarcia. Może ono zmienić
funkcję logiczną i spowodować zachowanie się bramki jak przy
błędach typu „sklejenie z..." (stuck-al-fault).
Mogą także wystąpić inne efekty, np. zmostkowanie wejścia z
wyjściem
w
kombinacyjnym
układzie
logicznym
może
spowodować, że zostanie utworzony układ sekwencyjny. Jeżeli dwa
wyjścia są zmostkowane, to wypadkowe napięcie na połączonych
razem liniach będzie zależało od wydajności prądowej bramek
wysterowujących te linie, gdy na jednej bramce jest wysoki poziom
napięcia, a na drugiej niski.
14
14
14
14
Model pojedynczego błędu
„sklejenia”
Model błędu typu „stuck-at” jest najbardziej
popularny z powodu swojej prostoty. Jest on
używany
jako
model
błędów
w
większości
symulatorów.
Rzeczywiste
uszkodzenie
powodujące
błąd
prawdopodobnie znajduje się wewnątrz bramki.
Model sklejania (stuck-at) opisuje skutki występowania
uszkodzeń fizycznych na wejściach lub wyjściach
układu.
8
15
15
15
15
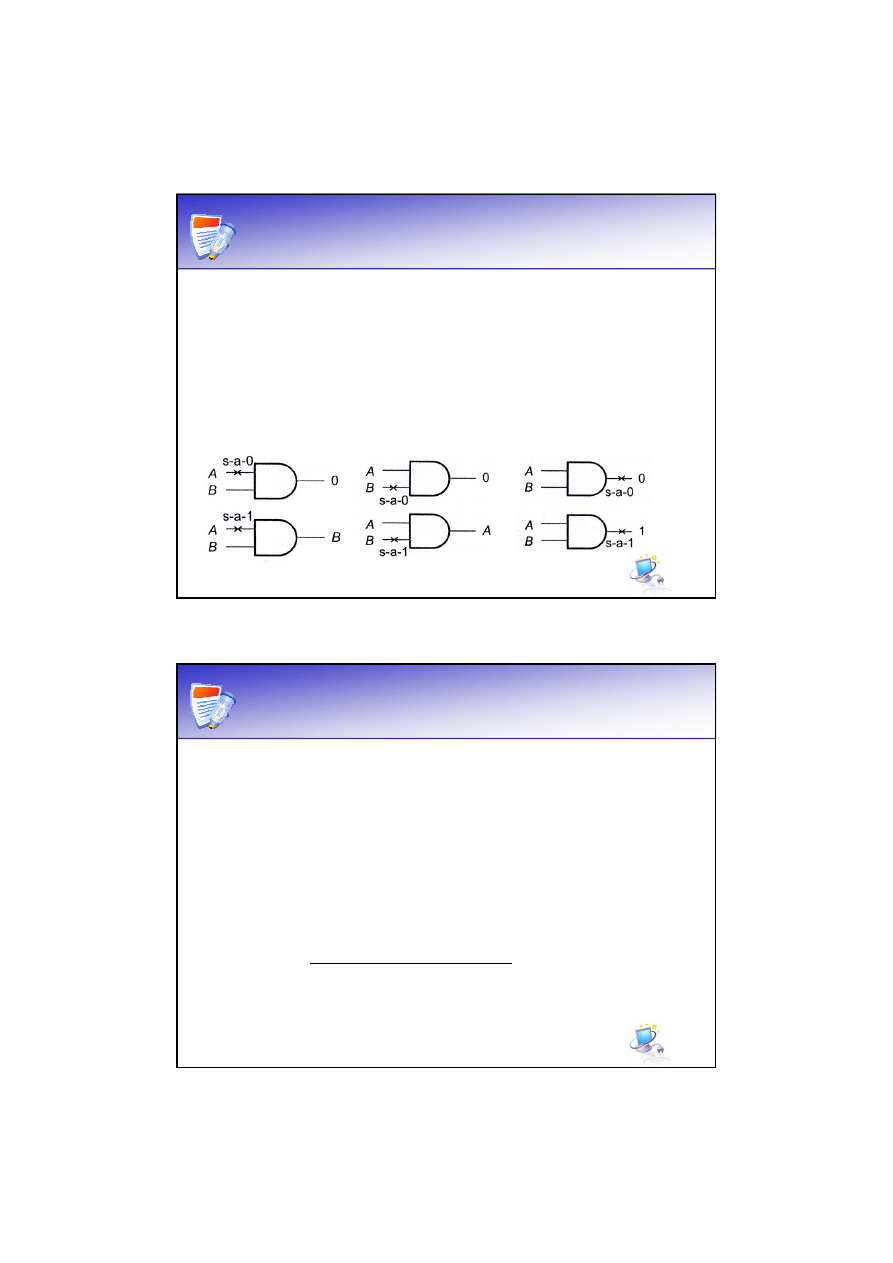
Model pojedynczego błędu - cd.
Dla dwuwejściowej bramki AND możliwych jest sześć
pojedynczych błędów sklejenia (stuck-at), czyli jeden z
dwóch możliwych błędów na każdej z trzech linii.
Ogólnie, przy k liniach sygnałowych występuje 2k
różnych kombinacji pojedynczych błędów.
16
16
16
16
Model pojedynczego błędu - cd.
Przy wielokrotnych błędach występujących jednocześnie,
każda linia sygnałowa może być:
• wolna od błędów,
• „sklejona z 0” (stuck-at-0)
• „sklejona z 1” (stuck-at-l).
Dla danych k różnych linii występuje 3
k
możliwych
kombinacji trzech stanów każdej linii. Jednym z nich jest
kombinacja braku w ogóle błędów na liniach układu.
W związku z tym jest
3
k
-1
różnych kombinacji stanów
określających występowanie przynajmniej jednego błędu na
k
liniach.
9
17
17
17
17
Model pojedynczego błędu - cd.
Lokalizacja błędów w prostym
układzie logicznym (5 możliwych
przypadków wystąpienia błędów:
s-a-0
lub
s-a-1,
czyli
10
możliwych pojedynczych błędów
sklejenia)
Lokalizacja błędów w układzie z
bramką AND obciążoną dwiema
innymi bramkami)
To uszkodzenie może być skutkiem
błędu na wyjściu bramki AND ale
może być też odrębnym uszkodzeniem
18
18
18
18
Generowanie wektorów
testowych dla układów
kombinacyjnych
10
19
19
19
19
Generowanie wektorów testujących
Tylko bardzo prosty układ mógłby być testowany przez
zastosowanie
wszystkich
kombinacji
wartości
sygnałów
wejściowych i porównanie otrzymywanych wartości sygnałów
wyjściowych z tablicą wartości definiującej funkcję układu.
Na przykład, dwuwejściowa bramka AND mogłaby być w pełni
przetestowana po podaniu na wejścia kombinacji wartości
sygnałów:
00
,
01
,
10
i
11
i stwierdzeniu, iż na wyjściu wystąpią
odpowiednio wartości:
0
,
0
,
0
i
1
.
Jeżeli wartości odpowiedzi różnią się w którymś przypadku, to
z całą pewnością wiemy, że w układzie wystąpiło uszkodzenie
powodujące ten błąd.
20
20
20
20
Generowanie wektorów testujących
Wektor
testowy
-
właściwe
kombinacje
wartości
sygnałów wejściowych zastosowane do wykrycia błędu.
Zbiór testów
- grupa wektorów testowych używanych do
sprawdzenia układu.
Ponieważ, wraz ze wzrostem złożoności układu zwiększa
się liczba jego wejść, więc wykorzystywanie do testowania
wszystkich kombinacji wartości sygnałów wejściowych
staje się
niepraktyczne
.
Podstawowym problemem jest więc wybranie
najmniejszej liczby wektorów testowych do wykrycia
błędów.
11
21
21
21
21
Metody tablicowe i algebraiczne
Jeżeli znana jest funkcja boolowska układu, to przez proste
porównania
funkcji
bez
uwzględniania
występowania
uszkodzeń i z uwzględnieniem występowania uszkodzeń można
wyprowadzić wyrażenia boolowskie opisujące wektory testowe.
Można to zrobić na podstawie tablicy prawdy przez zestawienie
wartości sygnałów wyjściowych z uwzględnieniem i bez
uwzględnienia uszkodzeń.
Można także wykonywać pewne przekształcenia algebraiczne
funkcji
boolowskich,
które
mogą
prowadzić
do
zbioru
odpowiednich
testów
(jak
np.
w
boolowskiej
metodzie
różnicowej).
Metody te można stosować dla bardzo małych układów.
22
22
22
22
Metoda
pobudzenia
ścieżki
Metoda pobudzenia (uaktywnienia) ścieżki
(path sensitization
method
) jest metodą odpowiednią dla bardziej złożonych układów
kombinacyjnych.
W tej metodzie stwierdza się, czy jakiś błąd występuje w danym
miejscu dzięki zastosowaniu przeciwnej wartości logicznej do
powodującej błąd w tym miejscu.
Jeżeli test jest dla błędu sklejenia z 1 (s-a-1), to stosujemy wartość
0. Jeżeli test ma wykryć błąd sklejenia z 0 (s-a-0), to stosujemy
wartość 1. Przez zastosowanie odpowiedniej wartości sygnału
wejściowego „włącza się” ścieżkę, którą dany układ przenosi błąd
uszkodzenia z miejsca jego występowania na wyjście, gdzie może
być obserwowany.
12
23
23
23
23
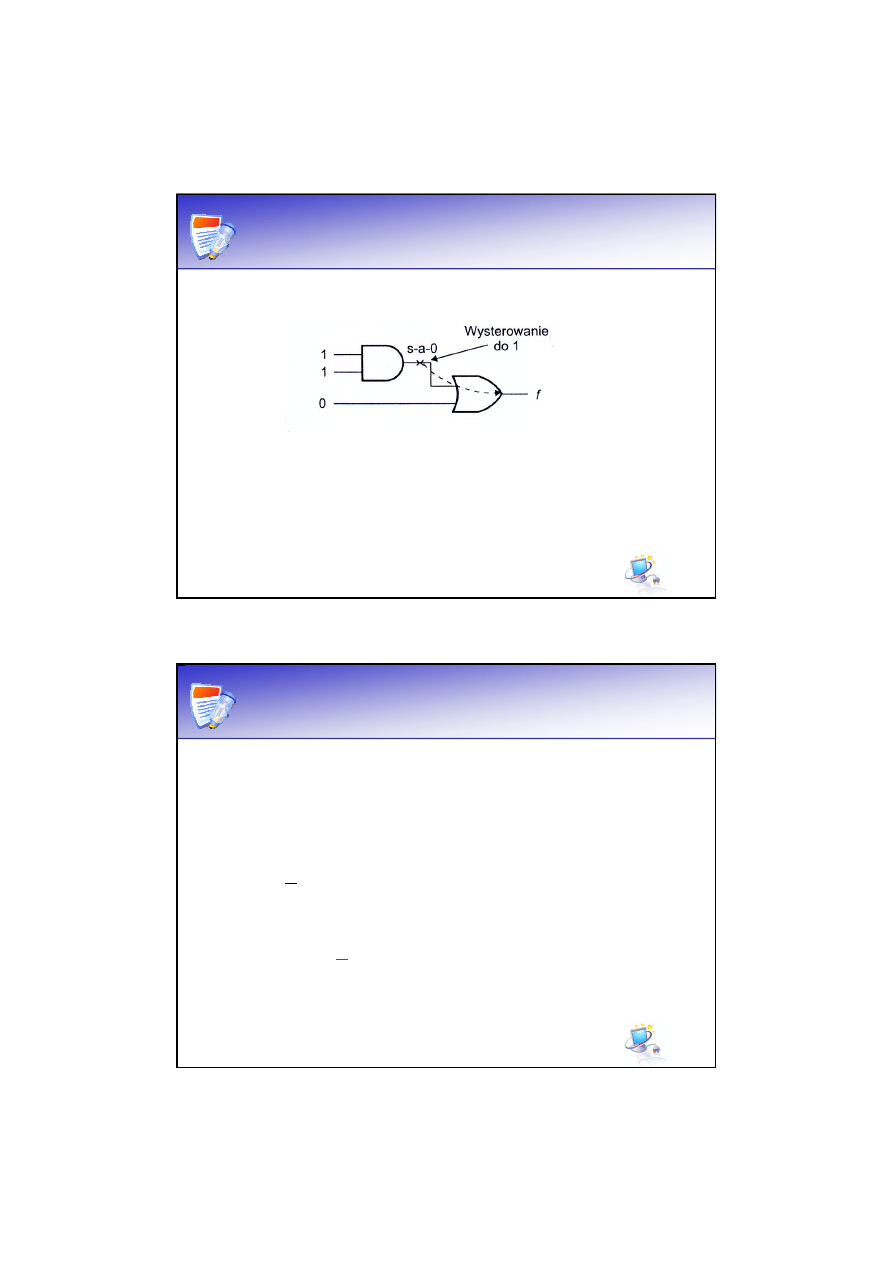
Metoda pobudzania... - przykład
Należy wykryć błąd typu s-a-0 na wyjściu bramki AND.
Wskazane miejsce błędu należy wysterować do wartości 1 (poziom
przeciwny do poziomu uszkodzenia). Można to zrealizować podając
wartość 1 na wejścia branki AND. Następnie musimy spowodować
propagację tego błędu do wyjścia, co można zrealizować podając
wartość 0 na wejście bramki OR. Wartość logiczna na wyjściu
bramki AND (tj. 0 - jeżeli jest uszkodzenie, 1 - gdy nie ma
uszkodzenia) pojawi się na wyjściu bramki OR.
24
24
24
24
W niektórych układach poziom logiczny może być odwrócony - na
przykład, przy użyciu bramek NOR zamiast bramek OR.
Dla ułatwienia opisu odpowiedzi układu zastosowano literę D do
wskazania, że sygnał wyjściowy przy niewystępowaniu błędu ma
wartość l, a przy wystąpieniu błędu w wartość 0.
Podobnie, D wskazuje, że sygnał wyjściowy ma wartość 0 przy
niewystępowaniu
uszkodzenia,
natomiast
wartość
1
przy
występowaniu uszkodzenia.
Symbole
D
i
D
pierwotnie
były
użyte
w
D
-algorytmie
(algorytmicznym sposobie otrzymywania wektorów testowych
metodą pobudzenia ścieżki), opracowanym przez Roth’a w 1967
roku.
Metoda pobudzania... – cd.
D
D
13
25
25
25
25
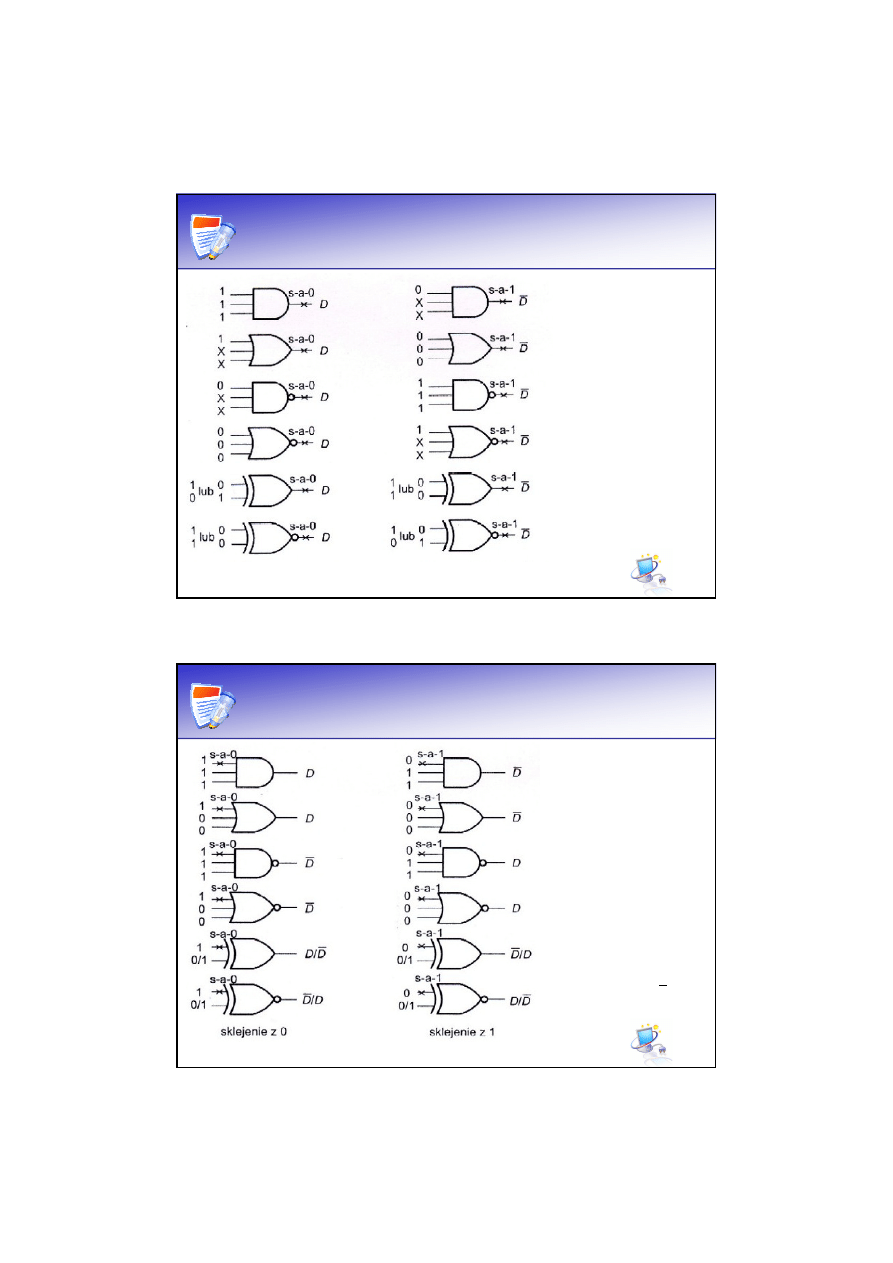
Wymuszanie wartości ...
Rysunek obrazuje wartości
sygnałów
wejściowych
wymagane, aby wymusić
na
wyjściu
każdej
z
podstawowych
bramek
wartość logiczną 0 lub l.
X - wartość nieokreślona
(don't care), czyli może
wówczas
występować
0
albo 1.
Podstawowe bramki mają
nierozróżnialne wejścia, a
więc można je zamieniać
nie
powodując
zmiany
wartości funkcji.
26
26
26
26
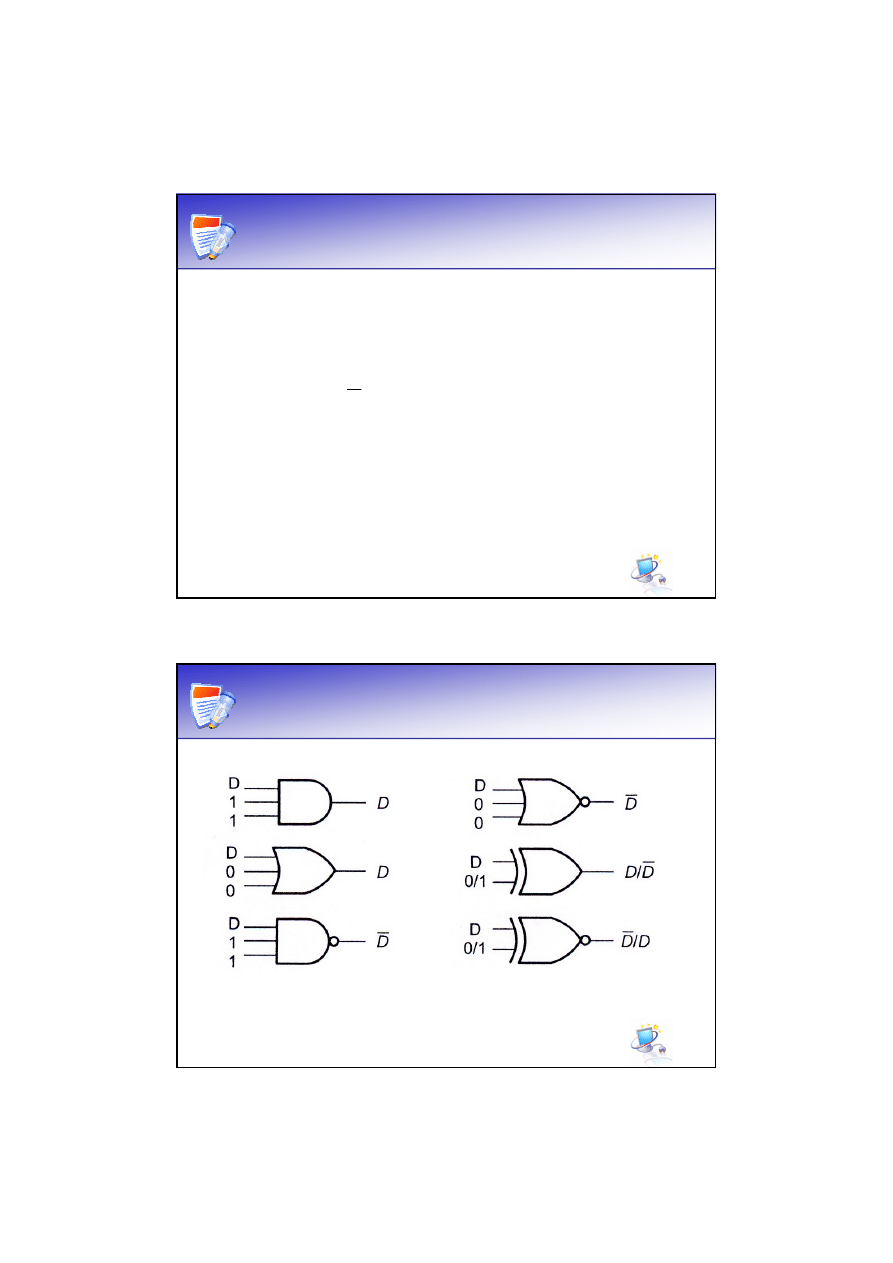
Wymuszanie odpowiednich wartości
Rysunek pokazuje wymagane
wartości sygnałów dla
podstawowych bramek, aby
nastąpiła propagacja błędów z
wejścia bramki na wyjście.
Bramki Ex-OR i Ex-NOR
mają użyteczną cechę, która
powoduje, że błąd z wejścia
jest propagowany przez
bramkę do wyjścia, niezależnie
od wartości logicznej na
pozostałym wejściu
(oczywiście, musimy wiedzieć,
czy poszukiwana wartość
odpowiedzi to D czy D).
14
27
27
27
27
Pobudzanie ścieżki
Każda bramka na ścieżce do zewnętrznego wyjścia powinna być
pobudzona.
Dla bramek podstawowych są potrzebne te same wartości sygnałów
wejściowych,
lecz
w
tym
przypadku
będzie
następowało
propagowanie D lub
.
Pobudzanie (włączanie) ścieżek jest realizowane przez zastosowanie
wartości logicznej l na wejściach bramek AND i NAND, lub przez
podanie wartości 0 na wejścia bramek OR i NOR (wyłączając
oczywiście wejście z występującym błędem). Dowolna wartość może
być natomiast zastosowana na wejściach bramek exclusive-OR i
exclusive-NOR.
D
28
28
28
28
Pobudzanie ścieżki – cd.
15
29
29
29
29
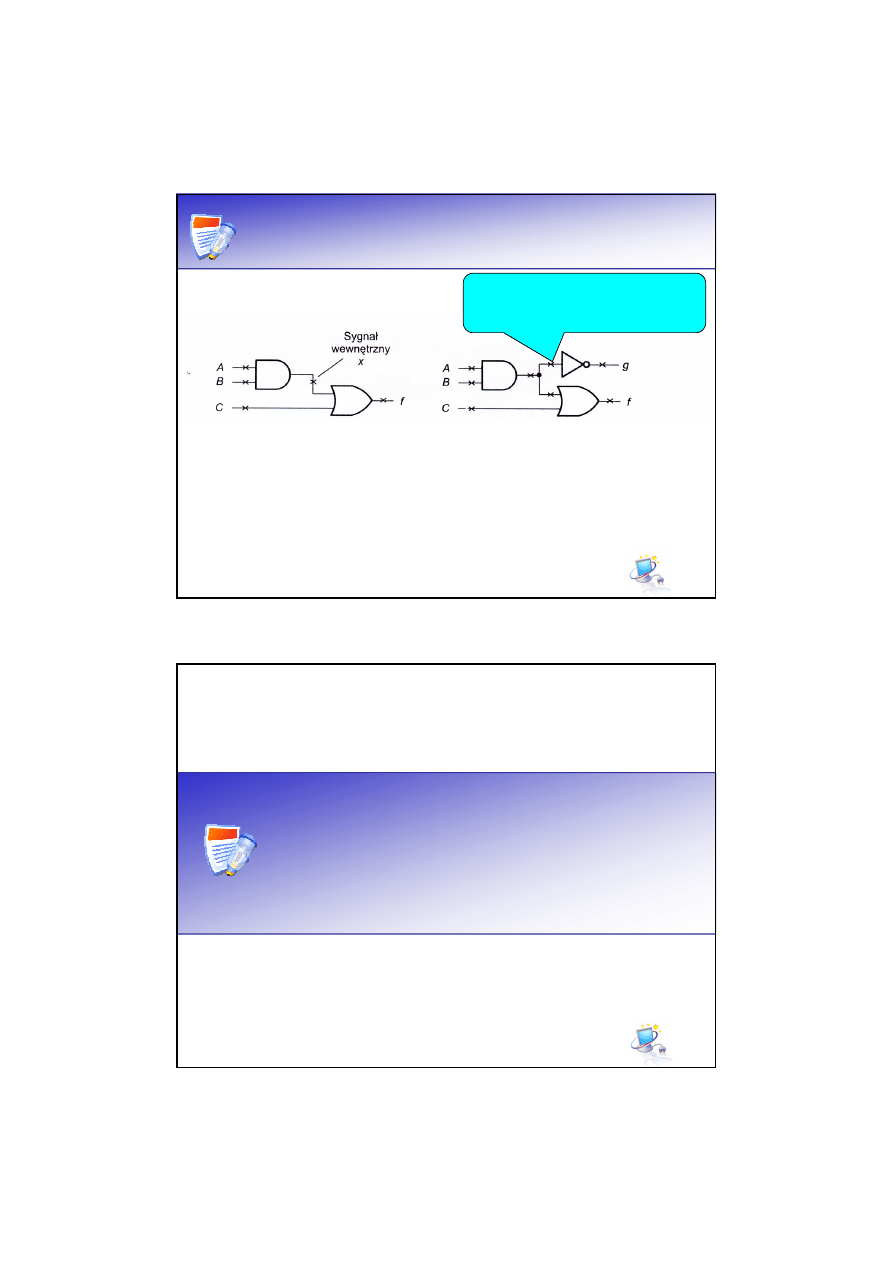
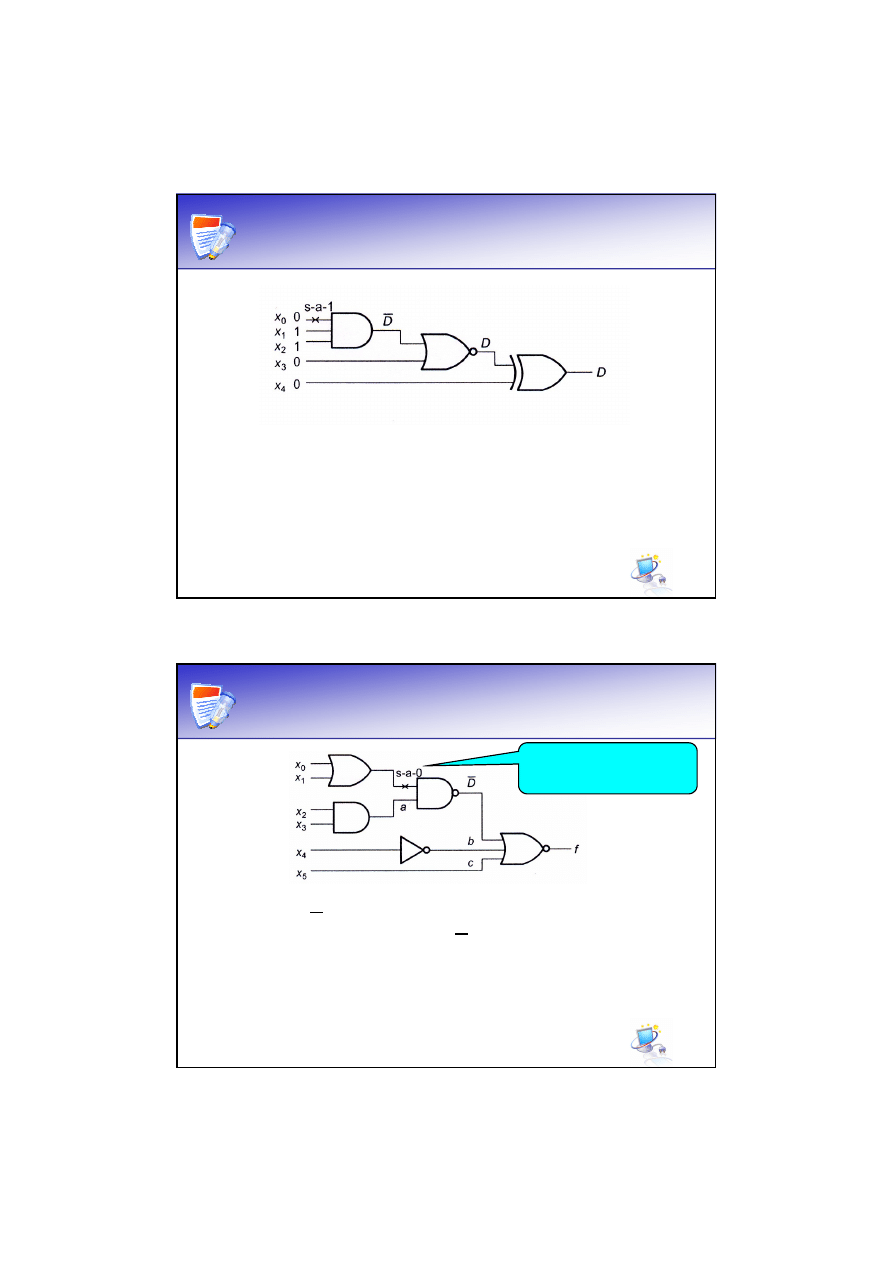
Pobudzanie ścieżki – przykład 1
Sygnałem x
0
=0 usiłujemy wymusić w miejscu występowania
błędu wartość logiczną 0. Sygnały na pozostałych wejściach
zewnętrznych
układu
powodują
pobudzenie
ś
cieżki
do
zewnętrznego wyjścia.
Jeżeli na wyjściu jest wartość l, to wiemy, że błąd nie występuje,
a gdy jest 0, oznacza to, że w układzie występuje błąd.
30
30
30
30
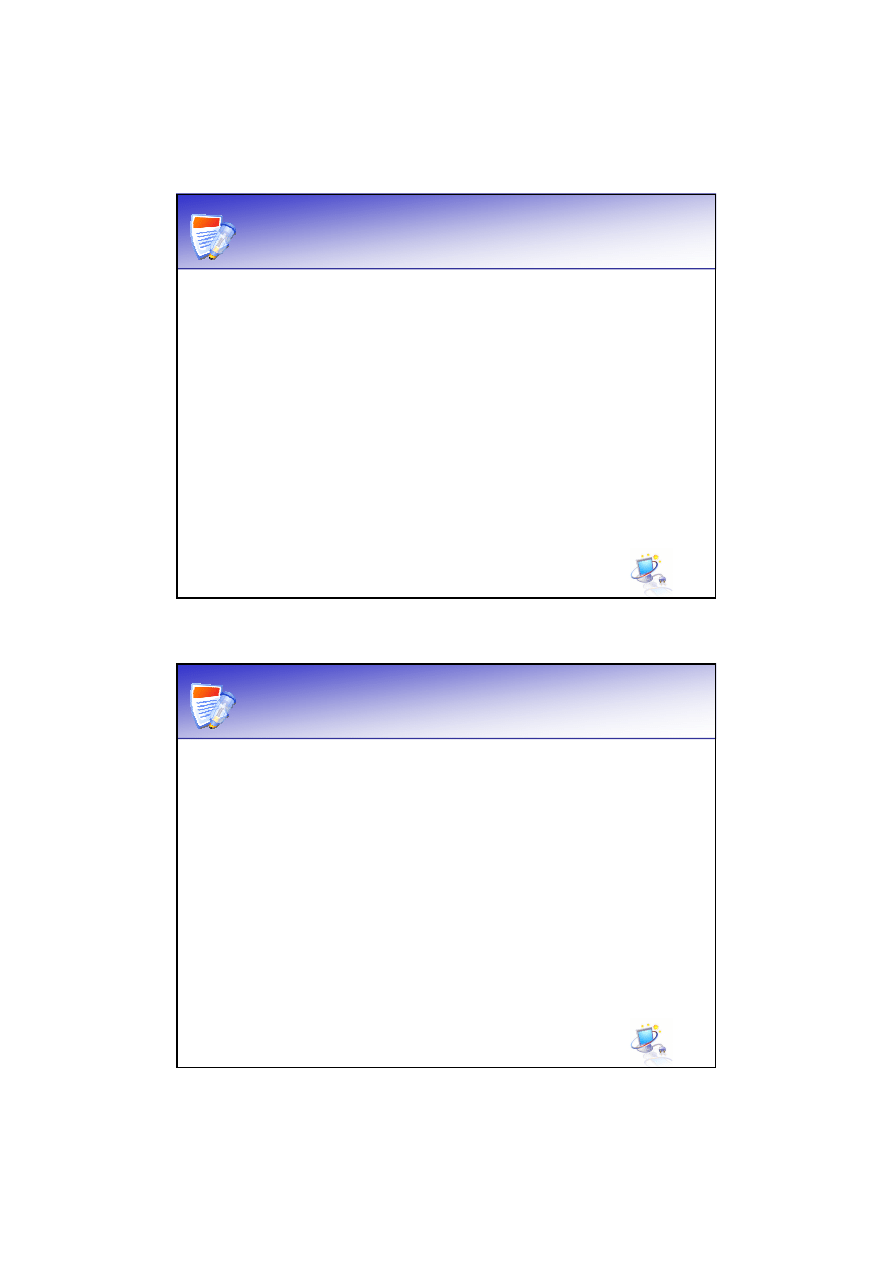
Pobudzanie ścieżki – przykład 2
Należy zapewnić: x
0
= 1 lub x
1
= 1 lub na obu wejściach x
0
=1
i x
1
=
1. Sygnał D na wyjściu bramki NAND wystąpi wówczas, gdy
punkt a=1, czyli x
2
=x
3
=1. Aby D zostało przekazane dalej na
wyjście f, należy spowodować, aby: b=0 i c=0, czyli x
4
= 1 i x
5
=0.
Stąd, wejściowy wektor testowy x
0
,x
1
,x
2
,x
3
,x
4
,x
5
może mieć postać:
011110 lub 101110 lub 111110.
Stwierdzenie błędu
sklejenia s-a-0
16
31
31
31
31
Równoważne błędy w bramce
Błędy
równoważne
,
to
takie
błędy,
które
są
wykrywane przez
te same wektory testowe
. Błędy nie
są równoważne, jeżeli istnieje co najmniej jeden
wektor testowy, który będzie wykrywał jeden z
błędów, lecz nie będzie wykrywał pozostałych.
32
32
32
32
Równoważne błędy - przykład
Przykład:
Testowana jest trójwejściowa bramka AND w celu
wykrycia błędów typu s-a-0 na wejściu.
Odpowiednim wektorem testującym jest 111, niezależnie od
wejścia, które jest sprawdzane na występowanie błędu.
Właśnie pod tym względem wszystkie błędy typu s-a-0 na
wejściach bramki AND są równoważne. Ten sam wektor
testowy 111 umożliwia także wykrycie błędu typu s-a-0 na
wyjściu. Prowadzi to do sytuacji, w której wszystkie
uszkodzenia typu s-a-0 na wejściach lub wyjściach bramki
AND są równoważne i możemy tylko stwierdzić jedno z nich.
Takim wektorem testowym nie można rozróżnić tych czterech
błędów.
17
33
33
33
33
Testowanie układów
sekwencyjnych i złożonych
systemów
34
34
34
34
Potrzeba testowania
Dotychczas rozpatrywane były proste kombinacyjne
układy logiczne. Układy sekwencyjne i złożone systemy
cyfrowe stawiają większe wymagania testowaniu.
Testowanie układów sekwencyjnych składa się zasadniczo
z dwóch etapów:
1. Układ sekwencyjny musi być przełączony do znanego
stanu.
2. Następnie układ z tego stanu musi być przełączony do
innego znanego stanu, po zastosowaniu odpowiednich
sygnałów wejściowych. Wymaga to sterowalności układu.
Obydwa stany: stan bieżący i następny muszą być możliwe
do obserwowania.
18
35
35
35
35
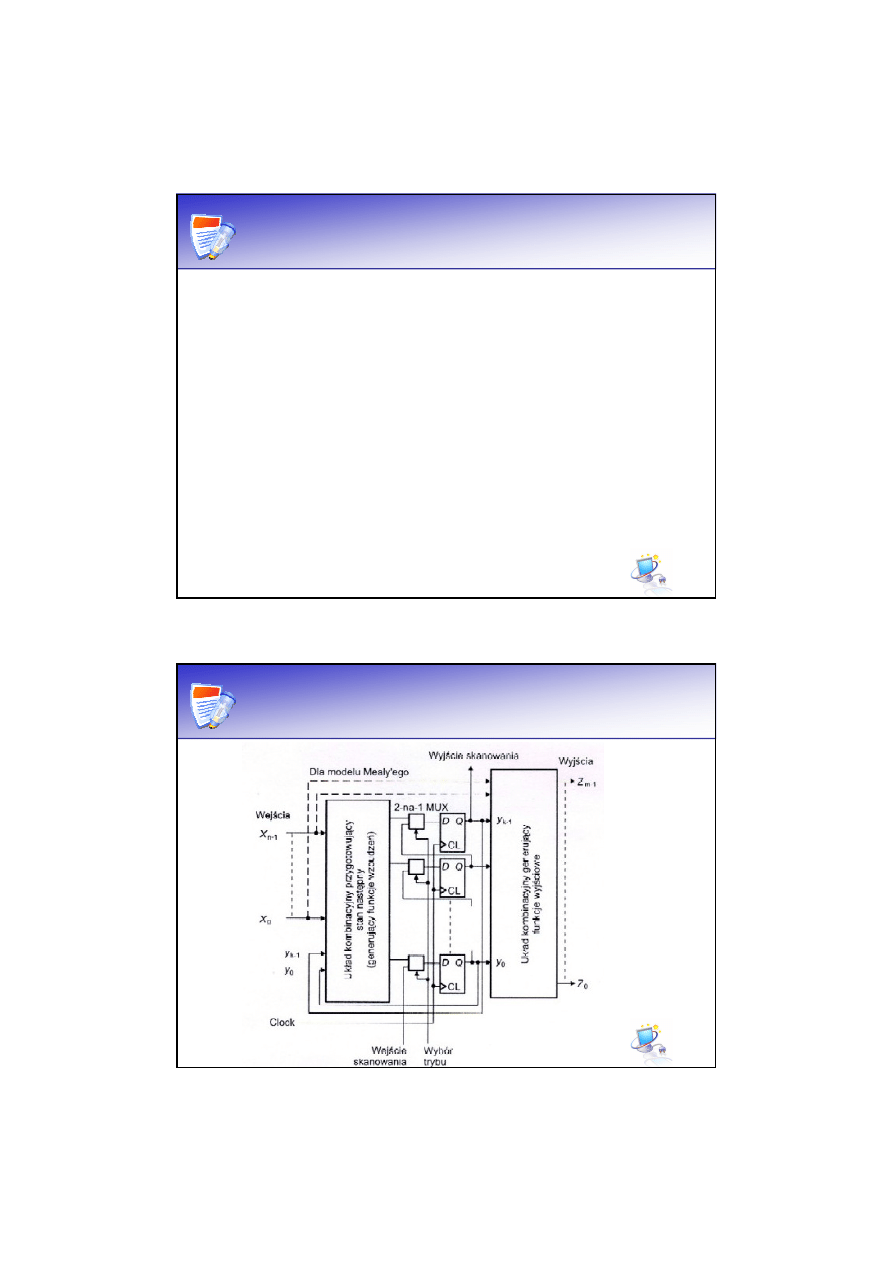
Metoda ścieżki testującej
Stosując
metodę
ś
cieżki
testującej
(skanującej)
dodajemy specjalne elementy do badanego układu, aby
umożliwić ustawianie i przełączanie przerzutników w
sposób szeregowy. Możliwe do wyboru ścieżki tworzy
się między sąsiednimi przerzutnikami tak, aby powstał
szeregowy rejestr przesuwający. Ścieżki szeregowego
wejścia i wyjścia są poprzez multipleksery dołączane do
przerzutników (tworząc z nich rejestr szeregowy) w
celu ich szeregowego zapisywania i odczytywania.
36
36
36
36
Metoda ścieżki testującej cd.
19
37
37
37
37
Wbudowane samotestowanie
W metodzie samotestowania wykorzystuje się dodatkowe
bloki logiczne wbudowane w strukturę układów, aby
skonfigurować układ do trybu testowania, wytworzyć
sekwencje testujące i umożliwić porównanie generowanych
dla nich odpowiedzi z sekwencją sygnałów wyjściowych.
Przykład:
Układ ze ścieżką testującą może być rozwinięty
w układ samotestujący poprzez wbudowanie do niego
generatora
sekwencji
dołączonego
do
wejścia
i
komparatorów
dołączonych
do
wyjścia
skanowania.
Zamiast generatora określonej sekwencji można zastosować
generator sekwencji pseudolosowej.
38
38
38
38
Testowanie krawędziowe
Metoda testowania (skanowania) krawędziowego
jest
rozszerzeniem metody ścieżki testującej na złożone
systemy realizowane w postaci układów cyfrowych.
Każdy układ scalony (chip) wykonuje się z wejściem i
wyjściem układu testowania krawędziowego, gdzie
przerzutniki
przejmują
informację
z
normalnych
wyprowadzeń
wejść
i
wyjść
oraz
tworzą
rejestr
przesuwający.
Wyjście
układu
testowania
krawędziowego jednego układu scalonego może być
dołączane
do
wejścia
testowania
krawędziowego
następnego układu scalonego, aby utworzyć jeden długi
rejestr przesuwający.
20
39
39
39
39
Koniec
Wyszukiwarka
Podobne podstrony:
Metodologia badań z logiką dr Karyłowski wykład 7 Testowalna w sposób etycznie akceptowalny
ECiUL wyklad 7
ECiUL wyklad 1
ECiUL wyklad 6
ECiUL wyklad 3
ECiUL wyklad 4
ECiUL wyklad 5
ECiUL wyklad 9 PLC
IOpr, wykład 6, testowanie
Metodologia badań z logiką dr Karyłowski wykład 7 Testowalna w sposób etycznie akceptowalny
ECiUL wyklad 7
Metodologia z elelmentami statystyki dr Izabela Krejtz wyklad 5 Testowanie hipotez Test T
Wykład 2 testowanie
pytania testowe i chemia budowlana -zestaw3, Szkoła, Pollub, SEMESTR II, chemia, wykład, testy
Pytania testowe z pierwszego wykladu
więcej podobnych podstron