
KOREKCJA ZAZĘBIENIA
W kołach o zazębieniu
niekorygowanym linia środkowa
narzędzia zębatki toczy się bez
poślizgu po kole podziałowym
nacinanego koła zębatego.
Wielkość odsunięcia lub dosunięcia
narzędzia wyraża się za pomocą
współczynnika przesunięcia
zarysu x.

• Korekcja dodatnia x>0
zarys
odsuwany od materiału koła.
• Korekcja ujemna x<0
zarys
dosuwany do materiału koła.
• np. x>0:
• w zazębieniu zewnętrznym
odsuwamy na zewnątrz koła,
• w zazębieniu wewnętrznym
odsuwamy ku wnętrzu koła.
• Dodatnie odsunięcie narzędzia w
zazębieniu zewnętrznym w kierunku
promieniowym o wielkość +xm umożliwia:
• wykonanie koła o małej liczbie zębów bez
podcinania stopy zęba,
• uzyskanie dowolnej odległości osi kół przy
zachowaniu znormalizowanych modułów
i całkowitej liczby zębów,
• poprawienie wytrzymałości zazębienia na
złamanie i na naciski (uniknięcie pracy
zarysów w pobliżu koła zasadniczego,
gdzie ewolwenta ma mały promień
krzywizny, a więc naciski są duże).
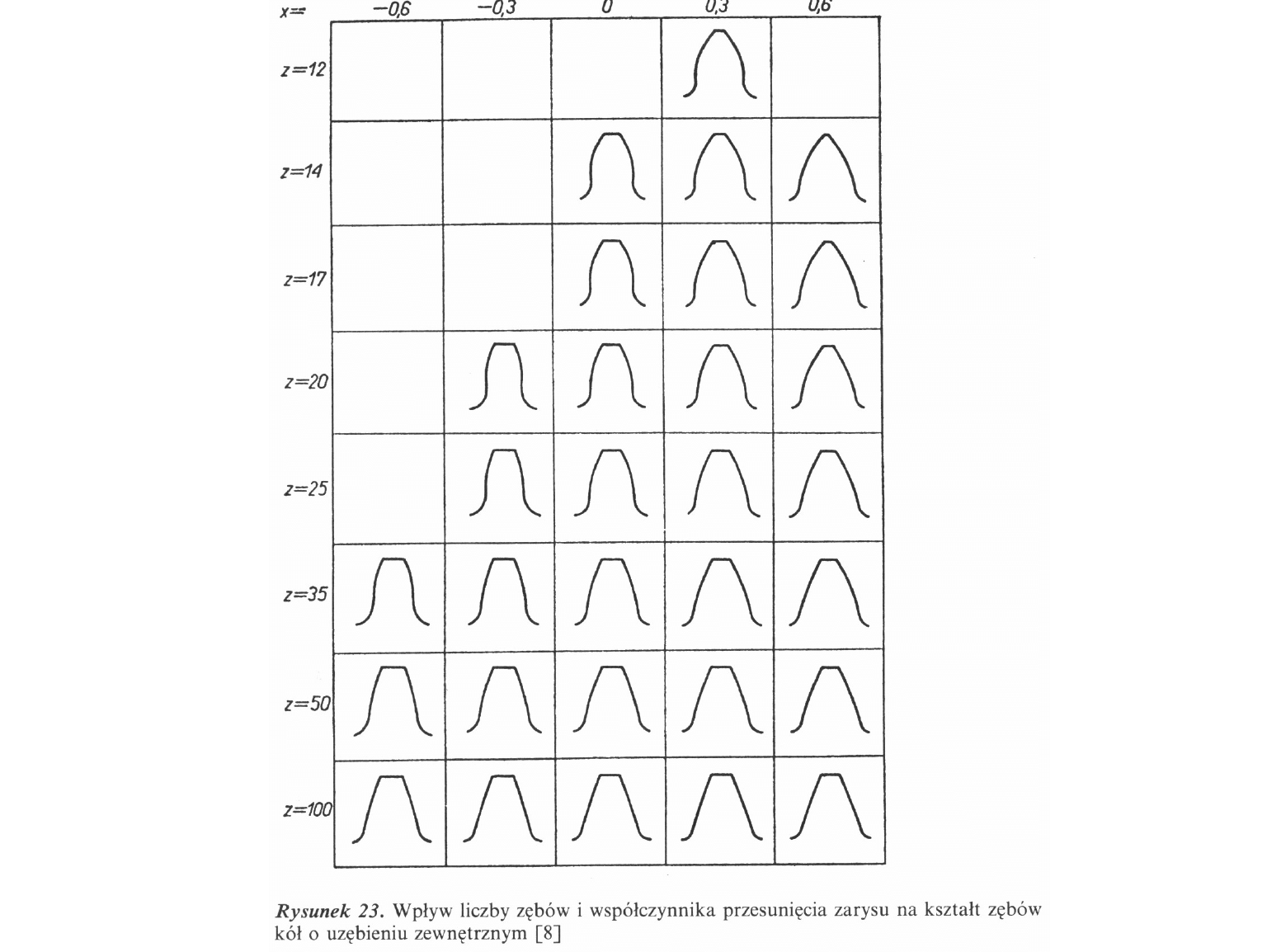
• Wpływ przesunięcia jest tym mniejszy
im większa jest liczba zębów.

• Korekcja ujemna:
• pogarsza warunki pracy,
• używana jest tylko dla uzyskania
potrzebnej odległości osi w kołach o
dużej liczbie zębów.

• Korekcja dodatnia jest
ograniczona zaostrzeniem zęba.
• Z praktyki wiadomo, że grubość zęba
na kole wierzchołkowym nie może
nie może być mniejsza niż 0,4 m, ze
względu na wykruszenie
wierzchołka.


• Rodzaje korekcji zazębienia:
• bez przesunięcia (zazębienie
niekorygowane)
• x
1
=x
2
=0
• równej sumie przesunięć (korekcja P-0)
• x
1
=-x
2
albo x
1
+x
2
=0
• dodatniej lub ujemnej sumie przesunięć
(korekcja P)
• x
1
+x
2
≠0

•
Stosując korekcję P-0 zachowuje się taką samą
odległość osi i ten sam kąt zarysu, czyli średnica
toczna pokrywa się z podziałową. Dodatnie
przesunięcie występuje dla zębnika, co pozwala na
uniknięcie podcinania, nadając zębom małego koła
korzystne kształty z punktu widzenia wytrzymałości
zmęczeniowej. Dla dużego koła występuje ujemne
przesunięcie zarysu ma mały wpływ na jego kształt.
•
Dla kół wykonanych z tego samego materiału i z
1
=z
2
stosowanie równej sumy przesunięć nie jest celowe.
•
Dla korekcji P współczynnik x
1
i x
2
dobiera się
oddzielnie, aby w optymalny sposób spełnione były
warunki wytrzymałościowe kół.
•
Korekcji P wymaga zmiany odległości osi, natomiast
przy korekcji P-0 odległość osi kół nie ulega
zmianie.

• Dla uniknięcia podcinania zęba
współczynnik przesunięcia zarysu:
/dla
0
=20
o
, h
a0
=1/
17
17
min
z
x

• Dla uzyskania założonej odległości
osi:
• W wyniku przesunięcia zarysu zębnika
o wartość x
1
m i koła o wartość x
2
m,
odległość między kołami a
0
uległaby
zmianie i wyniosłaby:
• W celu skasowania luzu należy
przybliżyć osie kół do siebie o
wielkość ym:
m
x
x
m
z
z
m
x
x
a
p
a
)
2
1
(
2
2
1
)
2
1
(
0
m
y
x
x
a
ym
p
a
w
a
)
2
1
(
0

• Jednocześnie należy skrócić głowy
zębów w obu kołach o tą samą
wielkość, zachowując przy tym stałą
wielkość luzu wierzchołkowego:
• Jeżeli współczynnik y jest mały w
porównaniu ze współczynnikiem luzu
wierzchołkowego,
można nie skracać głowy zęba,
godząc się na zmniejszenie
rzeczywistego luzu wierzchołkowego.
)
0
(
)
2
1
(
a
w
a
m
x
x
w
a
p
a
ym

Przy obliczeniach przesunięcia osi
stosuje się przybliżone metody:
)
1
(
0
p
B
a
p
a
)
1
(
0
r
B
a
w
a
m
z
z
a
)
2
1
(
5
,
0
0
Wartości współczynników Bp i Br w
funkcji kąta zarysu na średnicy
tocznej w przekroju normalnym do
linii zęba są stabelaryzowane.
o
tg
o
inv
nw
inv
p
B
20
20
1
cos
20
cos
nw
o
r
B

W praktyce konstrukcyjnej spotyka się
dwa typy zadań:
I. Dane są:
• moduł (m),
• liczba zębów (z
1
, z
2
),
• rzeczywista odległość osi (a
w
),
• Kąt przyporu na średnicy podziałowej
(nominalny)
• Tok postępowania:
• obliczenie a
0
,
• obliczenie B
r
,
• odczyt B
p
z tablic w funkcji B
r
,
• określenie tocznego kąta zarysu
w
z
tablic w funkcji Br lub Bp, albo z
zależności:
• obliczenie x
1
+x
2
,
• obliczenie współczynnika y,
cos
0
cos
w
a
a
w
tg
inv
inv
z
z
x
x
w
2
2
1
2
1

II. Dane są:
• moduł (m),
• liczba zębów (z
1
, z
2
),
• wartość współczynników
przesunięcia zarysu
(x
1
, x
2
)
• Kąt przyporu na średnicy podziałowej
(nominalny)
• Tok postępowania:
• obliczenie a
0
,
• obliczenie B
p
• odczyt B
r
z tablic w funkcji B
p
,
• obliczenie a
w
,
• obliczenie współczynnika y,
• określenie tocznego kąta zarysu
w
z
tablic w funkcji B
r
lub B
p
, albo z
zależności podanej poprzednio
inv
tg
z
z
x
x
inv
w
2
1
2
1
2
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
istota po korekcie
Teoria post korekcyjnego nr 1
Ściąga tematów GKK, wychowanie fizyczne, GIMNASTYKA korekcyjna
nazwy zawodów, dla dzieci i nauczycieli, zajęcia korekcyjno -kompensacyjne, zajęcia korekcyjno-kompe
Otocz kółkiem samogłoski, dla dzieci i nauczycieli, zajęcia korekcyjno -kompensacyjne, zajęcia korek
Doskonalenie elementów pływackich w plecach okrągło- wklęsły, Pływanie korekcyjne
Konspekt wg Herdy, Studia, Uczelnia, Metodyka pracy korekcyjno kompensacyjnej
KONSPEKT GIMNASTYKI KOREKCYJNEJ plecy wklęsłe 2
M. Bogdanowicz, metodyka zajęć korekcyjno-kompensacyjnych
GIMNASTYKA KOREKCYJNA, FIZJOTERAPIA, kinezyterapia
Metoda SI - notatka, metodyka pracy korekcyjno kompensacyjnej
Scenariusz zajęć korekcyjno
metodyka zajęć korekcyjnych wykład
KONSPEKT ZAJĘĆ KOREKCYJNO
zajęcia korekcyjno kompensacyjne I c 13 2014
Korekcja liniowych układów regulacji
więcej podobnych podstron