
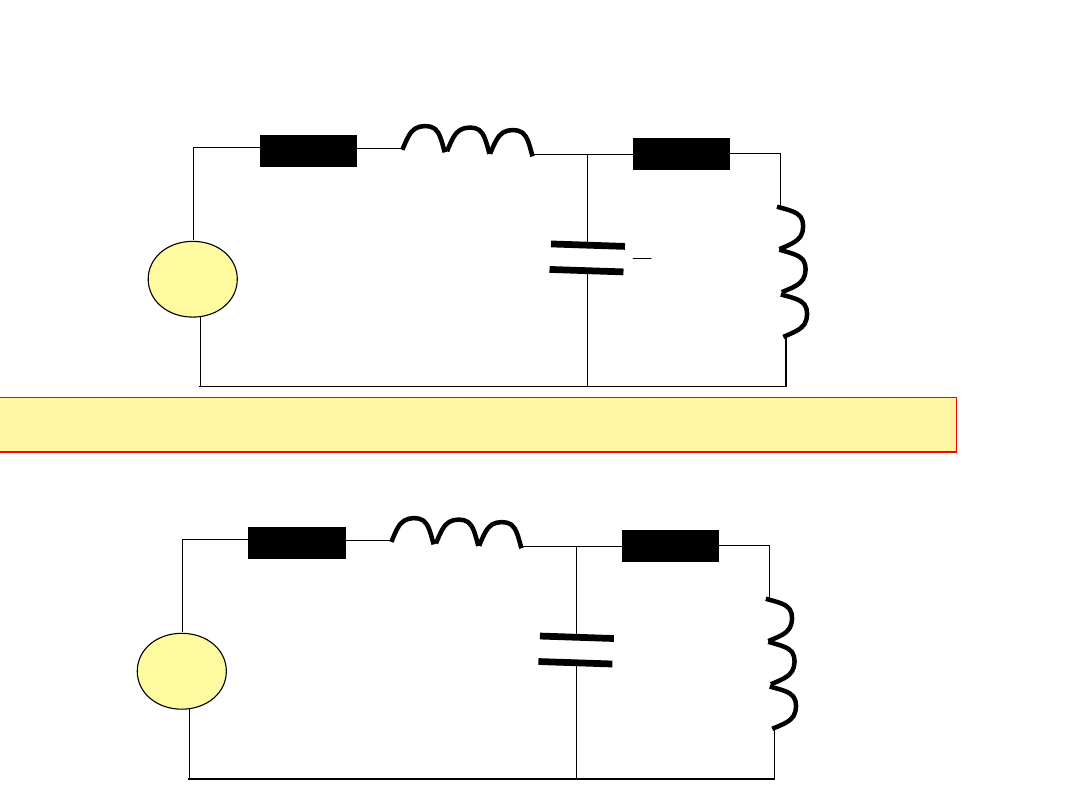
Obliczenia zostaną wykonane dla a =10, b =5
Zadanie: Obliczyć rozpływ prądów w obwodzie i przeprowadzić
bilans mocy:
~
230V, 50Hz
a[Ω]
b[mH]
5b[Ω]
10a[mH]
mF
a
1
~
230V, 50Hz
10Ω
5mH
25Ω
100mH
mF
1
.
0
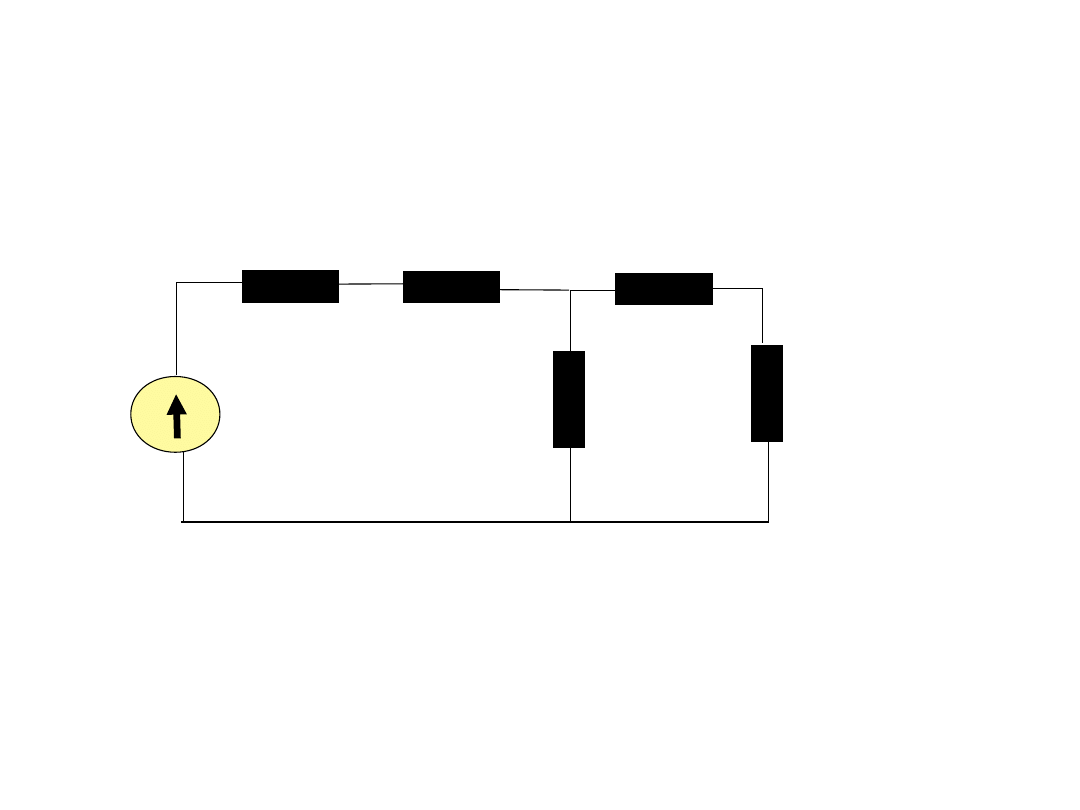
Schemat obwodu dla amplitud zespolonych f=50Hz → ω=314s
-1
.
Wszystkie wielkości w omach.
230V
10
j1.57
25
j31.4
85
.
31
j
230V
10+j1.57
25+j31.4
85
.
31
j
lub
I
I
1
I
2
2
.
31
j
5
.
40
10
428
.
1
4
.
2
01195
.
0
j
0155
.
0
01195
.
0
j
0155
.
0
1
Z
01195
.
0
j
0155
.
0
Y
01945
.
0
j
0155
.
0
4
.
31
25
4
.
31
j
25
4
.
31
j
25
1
Y
0314
.
0
j
85
.
31
j
1
Y
4
12
12
2
2
2
1
230V
10+j1.57
2
.
31
j
5
.
40
I
230V
50.5-j29.6
I
62
.
329
j
62
.
329
j
e
93
.
3
I
e
5
.
58
230
6
.
29
j
5
.
50
230
I
Moc dostarczana do obwodu:
kVAr
457
.
0
62
.
9
2
3
sin
0.904
Q
;
kW
78
.
0
62
.
9
2
3
cos
0.904
P
;
kVA
904
.
0
S
e
904
e
93
.
3
230
I
E
S
0
dost
0
dost
dost
62
.
329
j
62
.
329
j
dost
230V
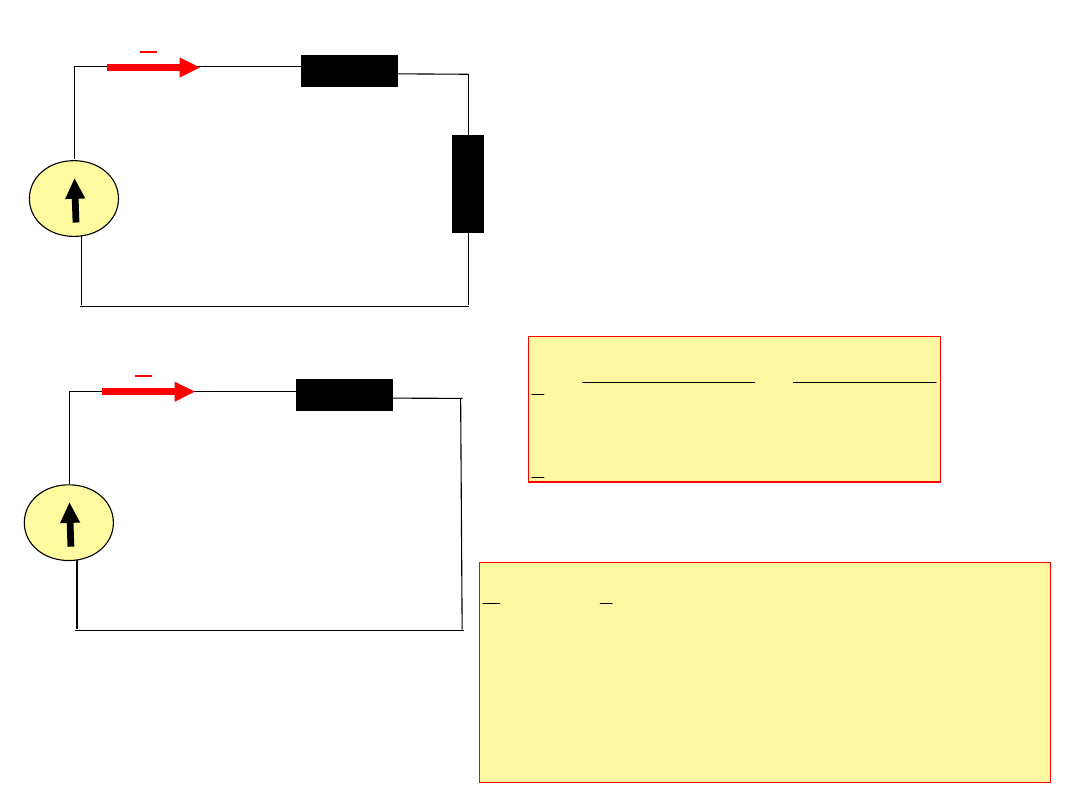
I=3.93e
-j329.62
10+j1.57
51.1e
j32239
U
12
=51.1e
j322.39
·3.93e
-j329.62
=201e
-j7.23
230V
10+j1.57
40.1e
j51.47
85
.
31
j
I
I
1
I
2
7
.
58
j
47
.
51
j
23
.
7
j
2
23
.
277
j
270
j
23
.
7
j
1
e
01
.
5
e
1
.
40
e
201
I
e
31
.
6
e
85
.
31
e
201
I
230V
10
j1.57
25
j31.4
85
.
31
j
I
I
1
I
2
Moc czynna pobrana w obwodzie P=10·3.93
2
+25·5.01
2
=0.78kW
Moc bierna pobrana w obwodzie
Q=1.57·3.93
2
+31.4·5.01
2
-31.85·6.31
2
=-0.456kVAr
Moc pozorna pobrana:
kVA
904
.
0
S
456
.
0
78
.
0
S
2
2
kVAr
457
.
0
Q
;
kW
78
.
0
P
;
kVA
904
.
0
S
dost
dost
dost
Z
R
Z
S
Z
T
I
R
I
S
I
T
Po obciążeniu każdej fazy impedancją odpowiednio:
R – Z
R
, S – Z
S
, T – Z
T
i jeżeli impedancje poszczególnych faz są jednakowe, czyli:
Z
R
=Z
S
=Z
T
=Z
to w poszczególnych fazach popłyną prądy o jednakowych
amplitudach I
m
opisane zależnością:
o
m
T
o
m
S
m
R
240
t
sin
I
t
i
120
t
sin
I
t
i
t
sin
I
t
i
Jeżeli obciążenie we wszystkich fazach jest jednakowe, to mówimy
o obciążeniu symetrycznym.
Jeżeli napięcia zasilające są symetryczne i obciążenia są
symetryczne, to taki układ nazywamy układem trójfazowym
symetrycznym.
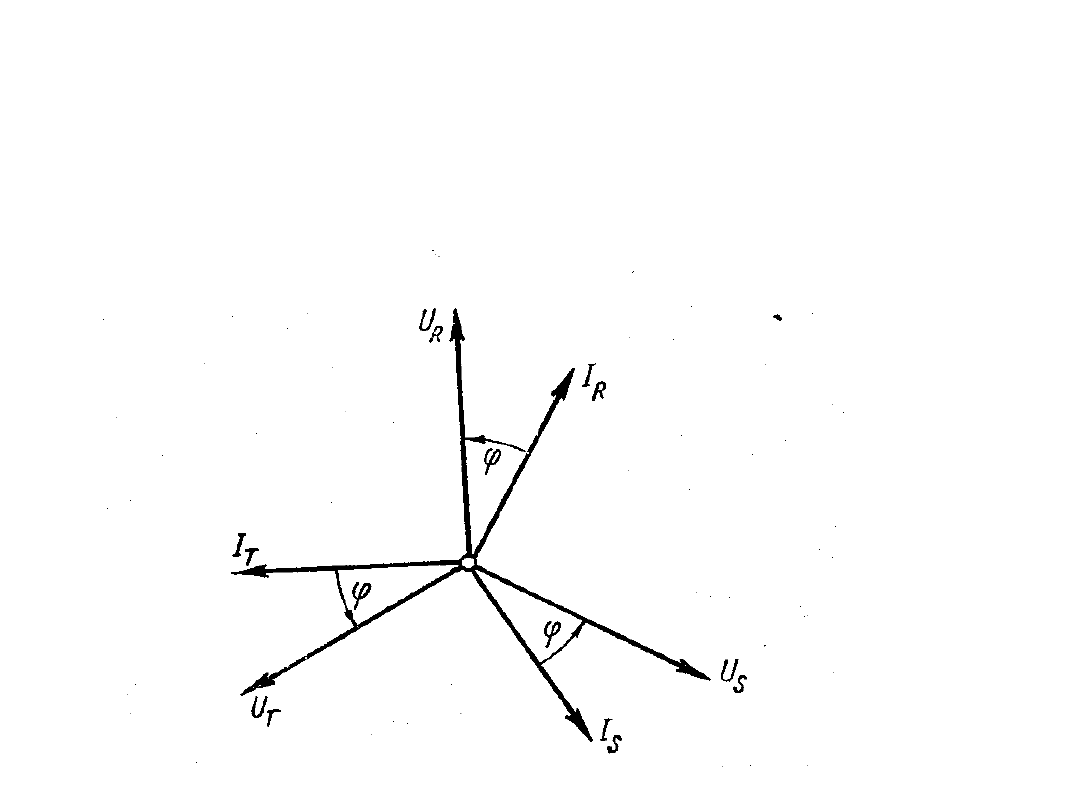
W układzie trójfazowym symetrycznym wystarczy wykonać
obliczenia dla jednej fazy R. Prądy i napięcia w pozostałych
dwóch fazach mają identyczne amplitudy i przesunięcia fazowe,
jak w fazie pierwszej, a jedynie należy je dodatkowo przesunąć
o 120
0
i 240
0
odpowiednio dla fazy S i T.
Układy trójfazowe skojarzone
U
R
U
S
U
T
U
R
, U
S
, U
T
– napięcia fazowe
U
RS
U
ST
U
TR
U
R
= U
S
= U
R
=U
f
Skojarzenie w gwiazdę
U
RS
, U
ST
, U
RT
– napięcia przewodowe lub międzyprzewodowe
W układzie symetrycznym: U
RS
=U
ST
=U
TR
=U lub U
p
U
S
+U
RS
-U
R
=0 czyli U
RS
=U
R
-U
S
i mamy z trójkąta:
f
f
f
p
U
3
U
3
5
.
0
U
3
5
.
0
U
Jeżeli U
f
=230V,
to U
p
=398V≈400V
Skojarzenie w trójkąt
U
RS
U
ST
U
TR
I
R
I
S
I
T
I
SR
I
TS
I
RT
I
R
+I
RT
-I
SR
=0
I
R
=I
SR
-I
RT
I
R
+I
RT
-I
SR
=0
I
R
=I
SR
-I
RT
30
0
I
R
I
SR
-I
RT
W układzie symetrycznym
amplitudy prądów przewodowych
są jednakowe I
R
=I
S
=I
T
=I
p
i amplitudy prądów fazowych
są jednakowe I
RT
=I
SR
=I
TS
=I
f
f
p
I
3
I
Sposoby przyłączania odbiorników do 4-ro przewodowej sieci
trójfazowej
,więc moc wyrażona
za pomocą wielkości przewodowych jest
Moc w układach trójfazowych
Odbiornik połączony w gwiazdę: P=3U
f
I
f
cosφ
Biorąc pod uwagę, że I=I
f
,
f
U
3
U
cos
UI
3
P
Odbiornik połączony w trójkąt
P=3UI
f
cosφ
dla wielkości przewodowych:
cos
UI
3
P
Moc bierna:
sin
UI
3
Q
Moc pozorna:
UI
3
S
Transformator
Transformator jednofazowy - budowa


f
z
44
.
4
E
f
z
44
.
4
E
m
2
2
m
1
1
Przekładnia transformatora:
2
1
2
1
z
z
E
E
Napięcia na zaciskach transformatora:
U
1
– pierwotne,
U
2
– wtórne
2
1
2
1
z
z
U
U
Ponieważ sprawność transformatora jest bardzo duża 0.95 – 0.99
więc zachodzi U
1
I
1
=U
2
I
2
stąd przekładnia prądowa:
1
z
z
I
I
1
2
2
1
Autotransformator

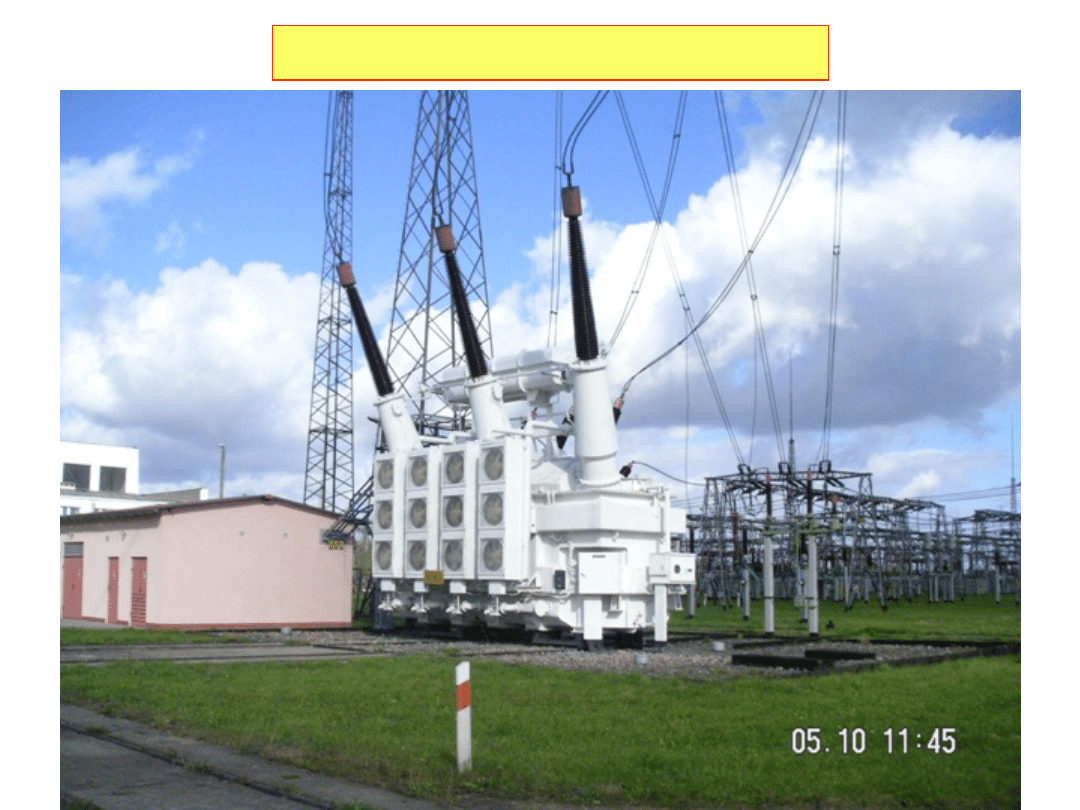
Transformatory trójfazowe

•
Autotransformator YNa0d11.
•
Moc: 160 MVA
•
Napięcie GN 230 kV, DN 120 kV
•
Częstotliwość znamionowa 50 Hz
•
Prądy znamionowe GN 401,6 A, DN 769,8 A
•
Masa całkowita 150 ton, masa oleju 42 tony, masa części wyjmowanej 85 ton




Maszyny prądu stałego
Maszynę przetwarzającą energię mechaniczną na elektryczną
nazywamy generatorem lub prądnicą.
Maszynę przetwarzającą energię elektryczną na mechaniczną
nazywamy silnikiem lub motorem.
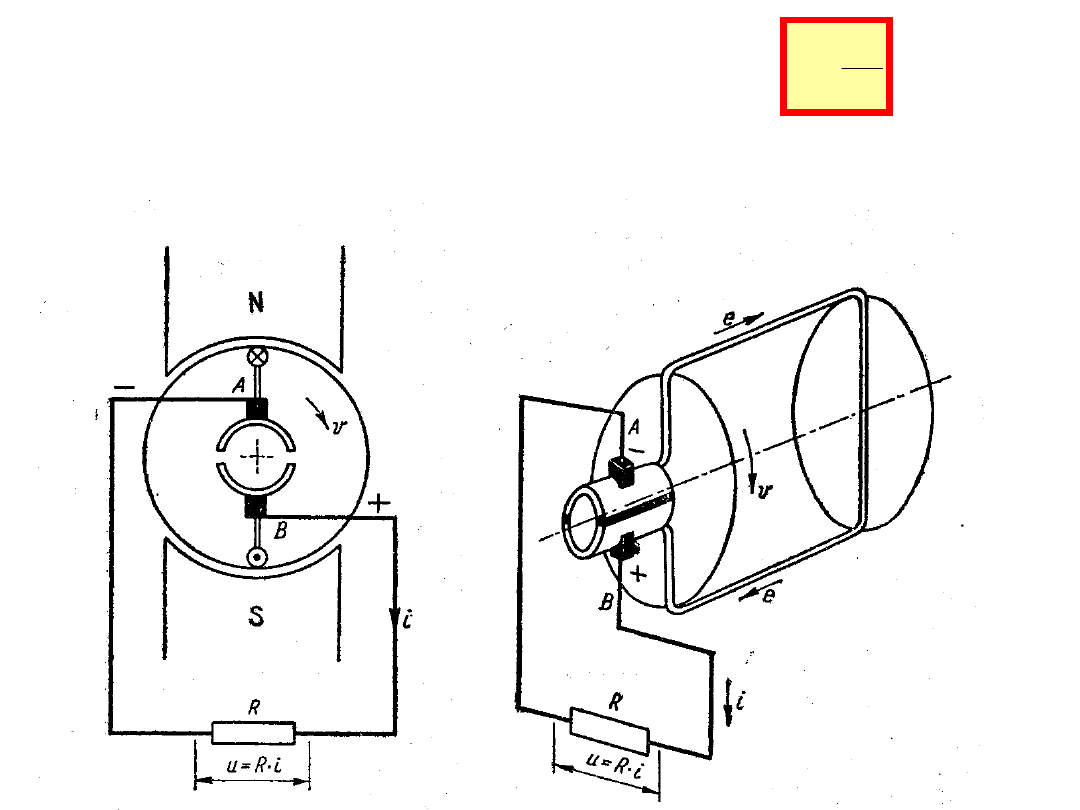
Maszyna elektryczna składa się z dwóch zasadniczych części:
stojana – nieruchoma część maszyny
wirnik – ruchoma część maszyny
Inne nazwy: stojan nazywany magneśnicą,
wirnik nazywany twornikiem

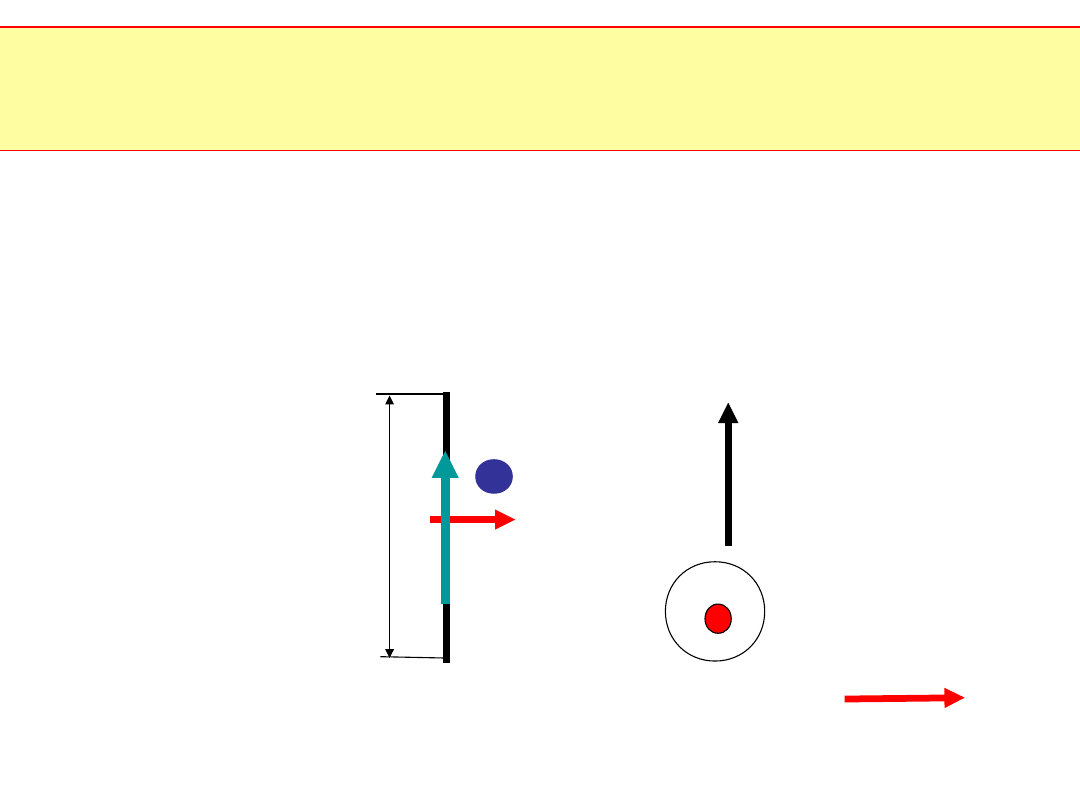
x
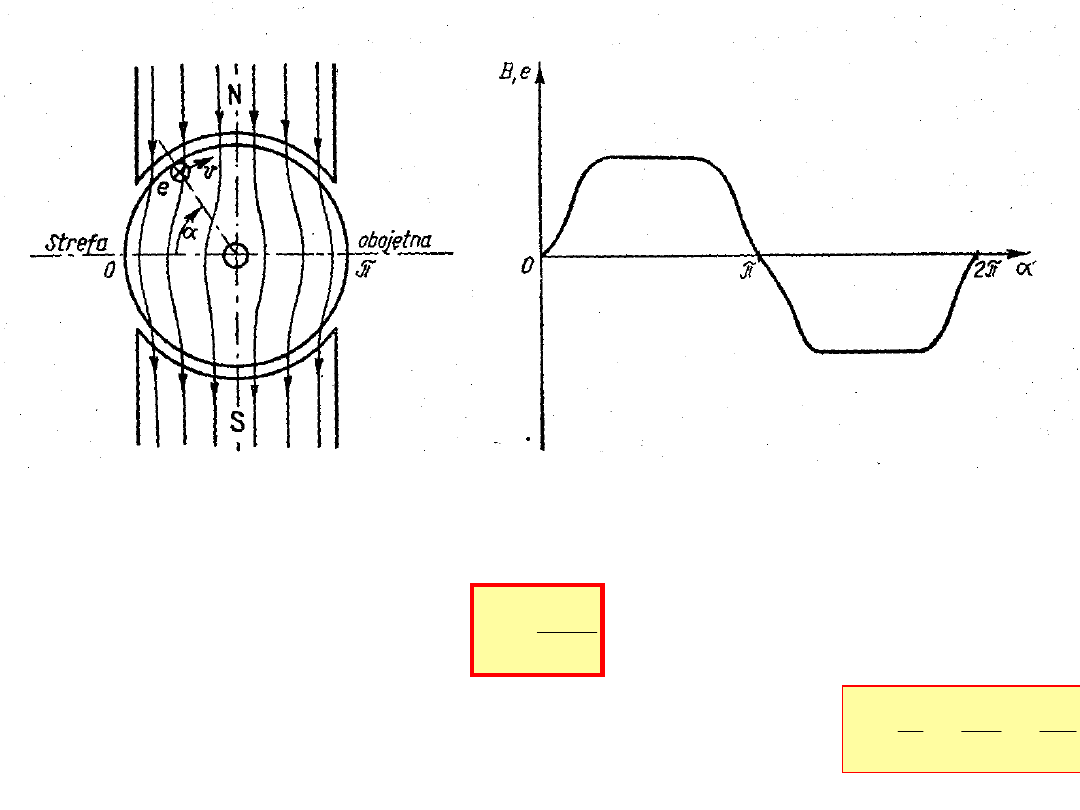
W przewodach wirnika generuje się siła elektromotoryczna E:
E=Blv
B – indukcja magnetyczna w teslach [T],
v – prędkość ruchu przewodu w m/s,
l – długość przewodu znajdującego się w polu magnetycznym
w metrach.
l
v
x
B
E
Reguła prawej ręki
x B
v
E
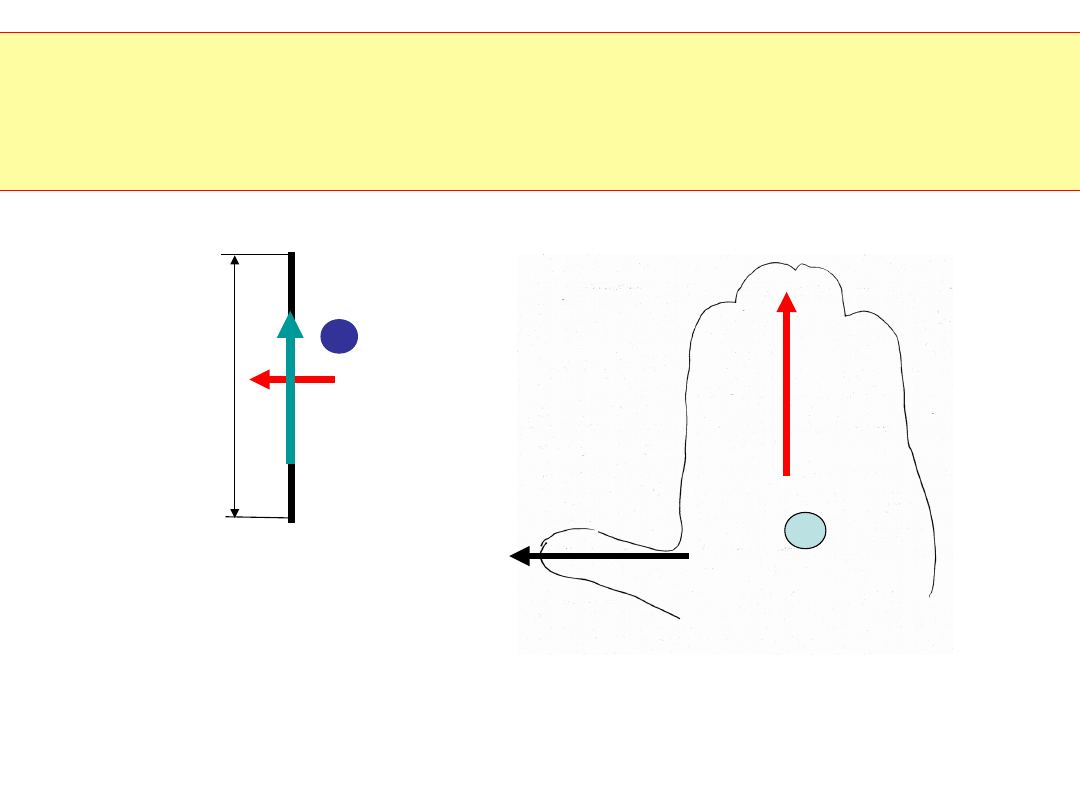
Jeżeli w polu magnetycznym o indukcji B zostanie umieszczony
przewód o długości l, w którym płynie prąd I, to na przewód
działa siła F=BIl
l
F
x
B
I
Reguła lewej ręki
W uzwojeniach wirnika na skutek ruch obrotowego w polu
magnetycznym powstaje zmienna w czasie siła elektromotoryczna
e(t)
X B
I
F
Prędkość kątowa wirowania wirnika ω, często używamy prędkości
obrotowej n liczonej w liczbie obrotów na minutę, czyli:
60
n
2
60
n
2
T
1
f
Dla maszyny o jednej parze biegunów p=1 i mamy:
Dla maszyny o p – parach biegunów mamy:
60
pn
f
Komutator – zamienia zmienną SEM twornika na stałą

Przebieg SEM i prądu cewki

Wykonanie komutatora wielodziałkowego
Przykład wykonania maszyny dwubiegunowej maszyny prądu
stałego.
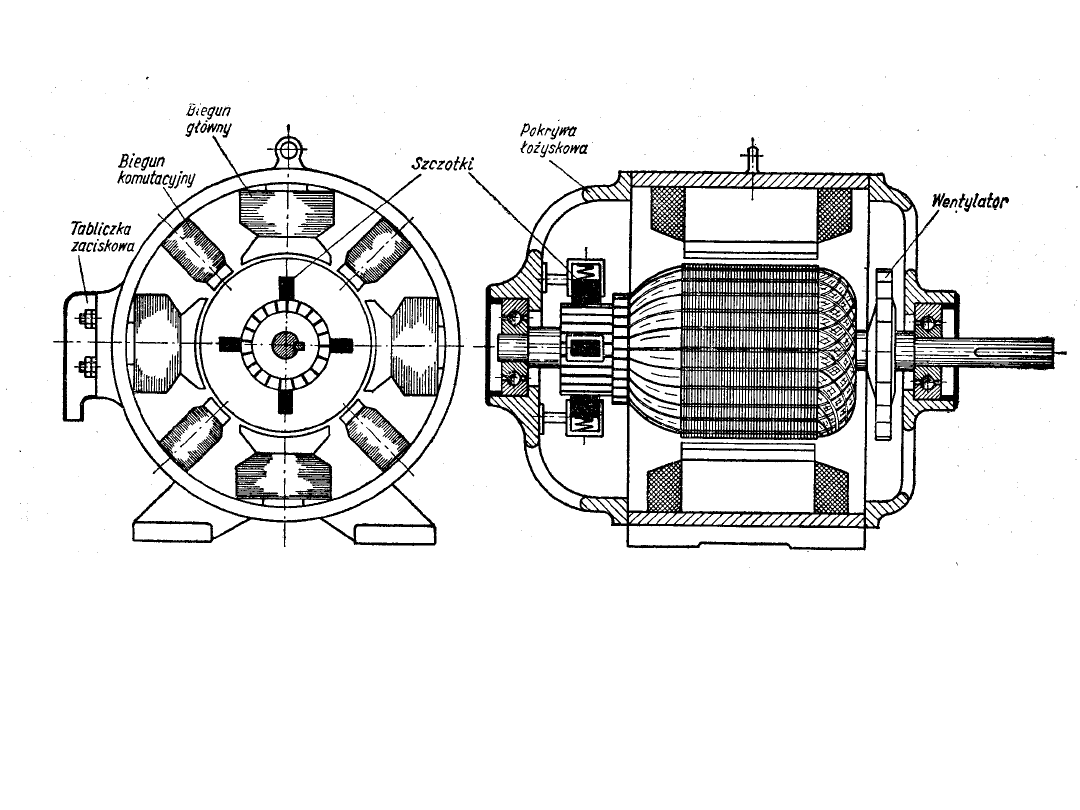
Uzwojenia wirnika są umieszczone w żłobkach


Wirnik
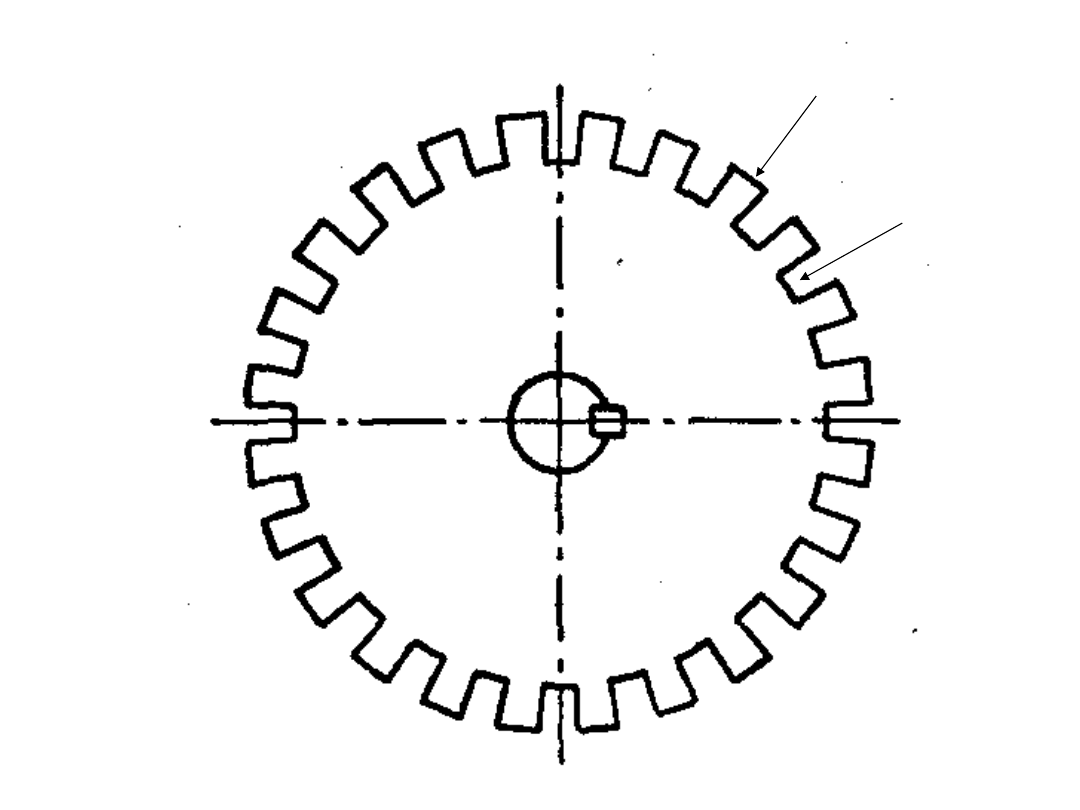
Przekrój poprzeczny wirnika
ząb
żłobek


Stojan

Prądnice prądu stałego ze względu na sposób wzbudzenia
dzielimy na
1.prądnice obcowzbudne
2.prądnice samowzbudne
Siła elektromotoryczna E generowana w maszynie prądu
stałego: E=kΦn
gdzie Φ –strumień główny maszyny w weberach [Wb],
n – prędkość obrotowa,
k – stała konstrukcyjna maszyny.
Prądnica obcowzbudna pracuje w schemacie:
Zależność U(I) przy I
m
=const i n=const jest nazywana
charakterystyką zewnętrzną

Charakterystyka zewnętrzna prądnicy obcowzbudnej U=f(I)
charakterystyka wewnętrzna E=f(I)
Regulację napięcia na zaciskach prądnicy przeprowadzamy
regulując prąd wzbudzenia I
m
zmieniając rezystor R
reg
. Krzywa, która podaje przepis jak
regulować prąd wzbudzenia I
m
w zależności od prądu obciążenia I
podaje charakterystyka regulacyjna.
uzwojenie biegunów
komutacyjnych

Charakterystyka regulacyjna
a – liczba liter w nazwisku, b – liczba liter w imieniu
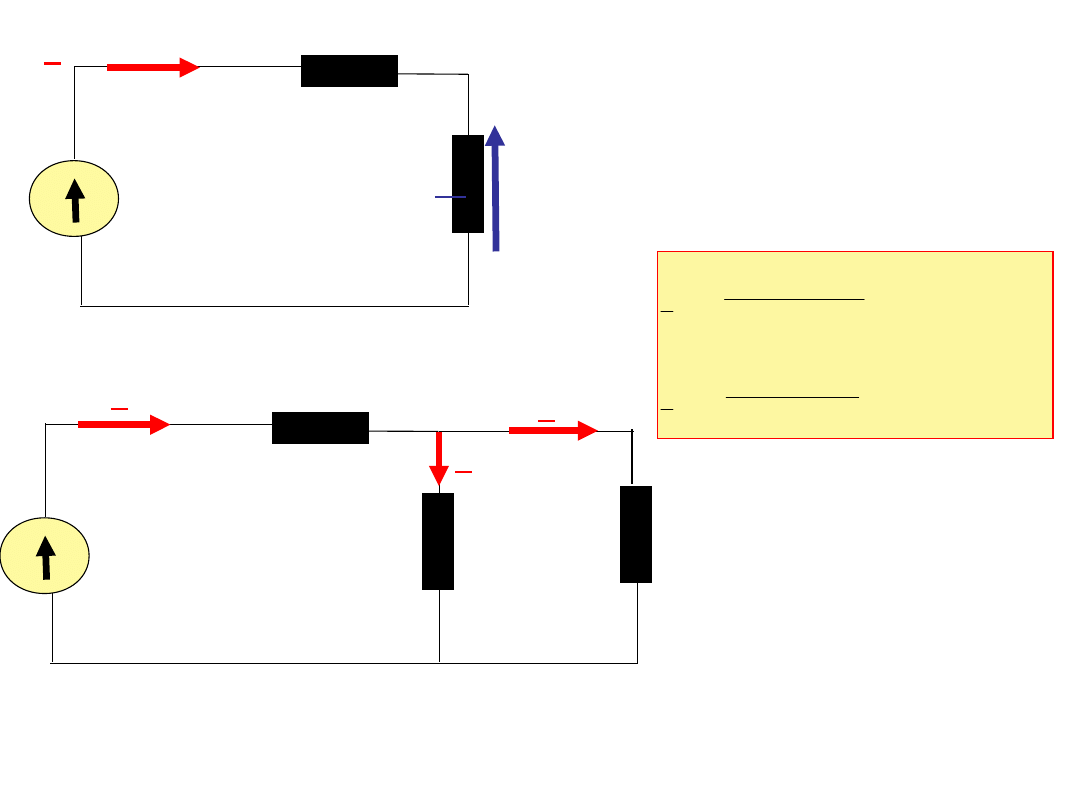
Zadanie 1. (10pktów) Wyznaczyć moc czynną, bierną i pozorną
dostarczaną do obwodu przez źródło.
~
230V, 50Hz
b[Ω]
b[mH]
5a[Ω]
5a[mH]
F
b
a
10
Zadanie 2. (5pktów) Napięcie po stronie niskiego napięcia
transformatora wynosi (a+b)[V], a prąd a·b[kA]. Jakie jest
napięcie i prąd po stronie wysokiego napięcia, jeżeli jego
przekładnia wynosi 20?
Maszyny obcowzbudne są rzadko stosowne gdyż wymagają
osobnego źródła zasilania.
Prądnica samowzbudna – warunki wzbudzenia
Maszyna pracuje w układzie:
R
k
– rezystancja krytyczna
1.istnieje magnetyzm szczątkowy,
2.zgodność strumienia wzbudzenia i magnetyzmu szczątkowego,
3.R
m
<R
k
Najczęściej stosowaną prądnicą prądu stałego jest
samowzbudna prądnica bocznikowa
uzwojenie biegunów komutacyjnych

Charakterystyka zewnętrzna prądnicy bocznikowej jest wyznaczana
przy stałej wartości R
reg
i przy stałej prędkości obrotowej n

Prądnica szeregowa
uzwojenie biegunów komutacyjnych

Charakterystyka zewnętrzna
Ze względu na dużą zmienność napięcia w zależności od obciążenia
maszyna nie jest praktycznie stosowana.
Prądnica szeregowo - bocznikowa

Charakterystyka zewnętrzna prądnicy szeregowo - bocznikowej
Stosowana dla uzyskania stabilnego napięcia na wyjściu.
Silniki prądu stałego
F=BIl
Moment maszyny jest:
M=cΦI
t
gdzie
Φ – strumień główny,
I
t
– prąd wirnika,
c – stała konstrukcyjna.

W przewodach wirnika powstaje siła elektromotoryczna E
E=kΦn
Napięcie na zaciskach twornika: U=E+R
tc
I
t
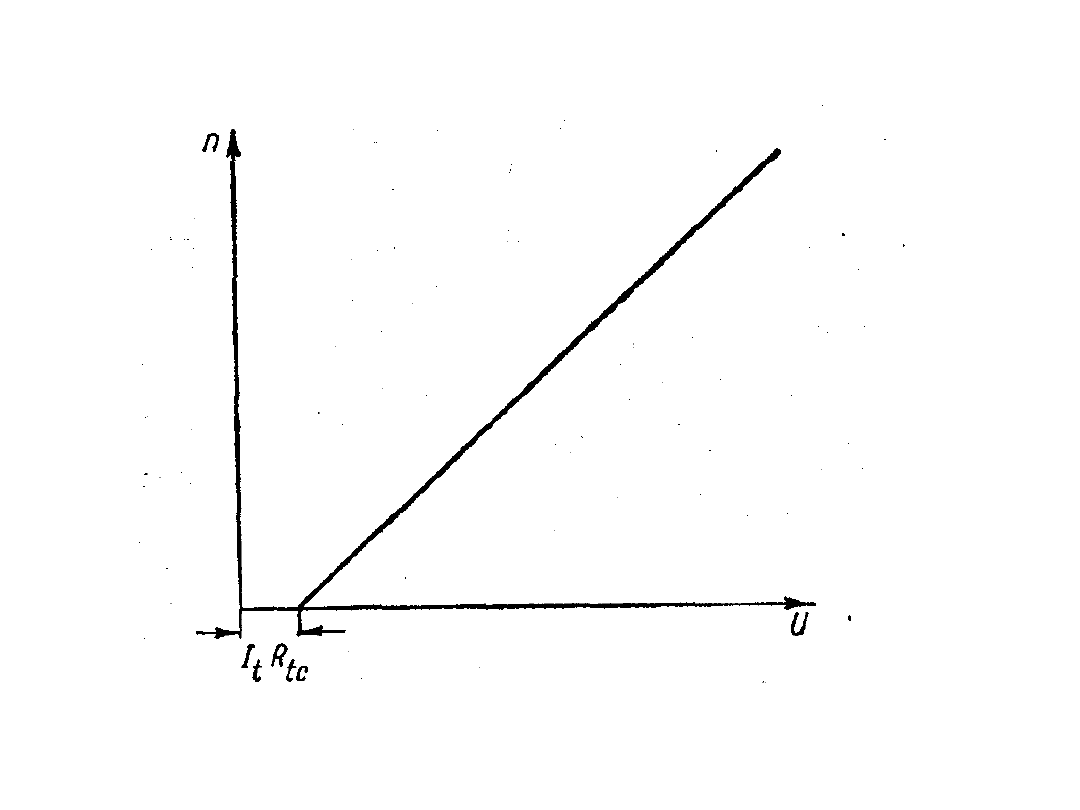
i prędkość obrotową silnika otrzymujemy z zależności:
k
I
R
U
n
t
tc
Rozruch silnika prądu stałego
Bez rezystora rozruchowego
prąd rozruchowy osiąga
bardzo duże wartości około
20I
n

Rozruch z czterostopniowym rozrusznikiem

Silnik bocznikowy prądu stałego
Moment silnika bocznikowego w funkcji prądu twornika
Moment maszyny jest:
M=cΦI
t
Charkterystyka mechaniczna silnika jest to zależność między
prędkością obrotową n a momentem obrotowym
Charakterystyka mechaniczna naturalna silnika bocznikowego.
Silnik przyłączony do sieci bez żadnych rezystorów na napięcie U
n
n
0
- prędkość idealnego
biegu jałowego
k
U
n
0
Spadek prędkości
przy obciążeniu
momentem M
Spadek prędkości Δn przy obciążeniu momentem M jest:
M
ck
R
n
2
tc
W silnikach bocznikowych przy obciążeniu momentem
znamionowym ten spadek prędkości procentowy s jest
rzędu (5 – 10)%
100
n
n
n
%
s
0
Charakterystyka mechaniczna naturalna silnika bocznikowego
jest tzw. charakterystyką sztywną
Jeżeli do obwodu twornika włączymy dodatkowe rezystory,
to otrzymujemy tzw. charakterystyki mechaniczne sztuczne.
Charakterystyki nazywamy charakterystykami miękkimi
Wykorzystujemy je przy rozruchu
dt
d
J
M
M
M
op
d
M
rp
– moment rozruchowy, M
n
– moment znamionowy,
M
op
– moment oporowy
Regulacja prędkości silnika bocznikowego
k
I
R
R
U
n
t
d
tc
Prędkość można regulować na trzy sposoby:
1.Przez zmianę oporu R
d
,
2.Przez zmianę strumienia Φ,
3.Przez zmianę napięcia U.
Regulacja przez zmianę oporu R
d

Wady: Niska sprawność – strata mocy w rezystancji R
d
do 50%,
duża podatność zmian prędkości na zmiany obciążenia.
Ten sposób stosowany rzadko, tylko przy rozruchu.
Przez zmianę strumienia Φ
Regulujemy prąd magnesujący I
m
rezystorem R
d
.
Prąd I
m
jest mały w stosunku
do prądu twornika I
t
(kilka %).
Praktyczny zakres regulacji
prędkości silnika:
3
n
n
min
max
W żadnym przypadku nie można
dopuścić do przerwania obwodu
wzbudzenia, gdyż wtedy Φ≈0 i
k
I
R
R
U
n
t
d
tc
prędkość osiąga bardzo duże wartości
co grozi zniszczeniem silnika. Nazywamy to rozbieganiem silnika.
Przez zmianę napięcia U
Napięciem steruje się stosując układy energoelektroniczne.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
- Slide 67
- Slide 68
- Slide 69
- Slide 70
- Slide 71
- Slide 72
- Slide 73
- Slide 74
Wyszukiwarka
Podobne podstrony:
Wykład podstawy elektrotechniki no 4
Wykład podstawy elektrotechniki no 8
Wykład podstawy elektrotechniki no 6
Wykład podstawy elektrotechniki no 1
Wykład podstawy elektrotechniki no 9
Wykład podstawy elektrotechniki no 2
Wykład podstawy elektrotechniki no 3
Wykład podstawy elektrotechniki no 4
Odp, Energetyka PWr, III semestr, Wykłady, Podstawy elektroniki, Elektronika zaliczenie
FIG-02D, Elektrotechnika, PODSTAWY ELEKTROTECHNIKI, wyklad
Podstawy Elektroniki (wyklad 2)
wyklad12tt20, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła, Elekt
wyklad07tt08, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła, Elekt
wyklad15tt24, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła, Elekt
wyklad03tt02, aaa, studia 22.10.2014, Materiały od Piotra cukrownika, materialy Kamil, Szkoła, Elekt
FIG-02C, Elektrotechnika, PODSTAWY ELEKTROTECHNIKI, wyklad
Podstawy Automatyki Lab 10 CW3 Układy sekwencyjne elektroniczne
wykład 3 - podstawy zarządzania - 10.01.2010
więcej podobnych podstron