
Układy regulacji ciągłej
Wprowadzenie
Projektowanie ad hoc
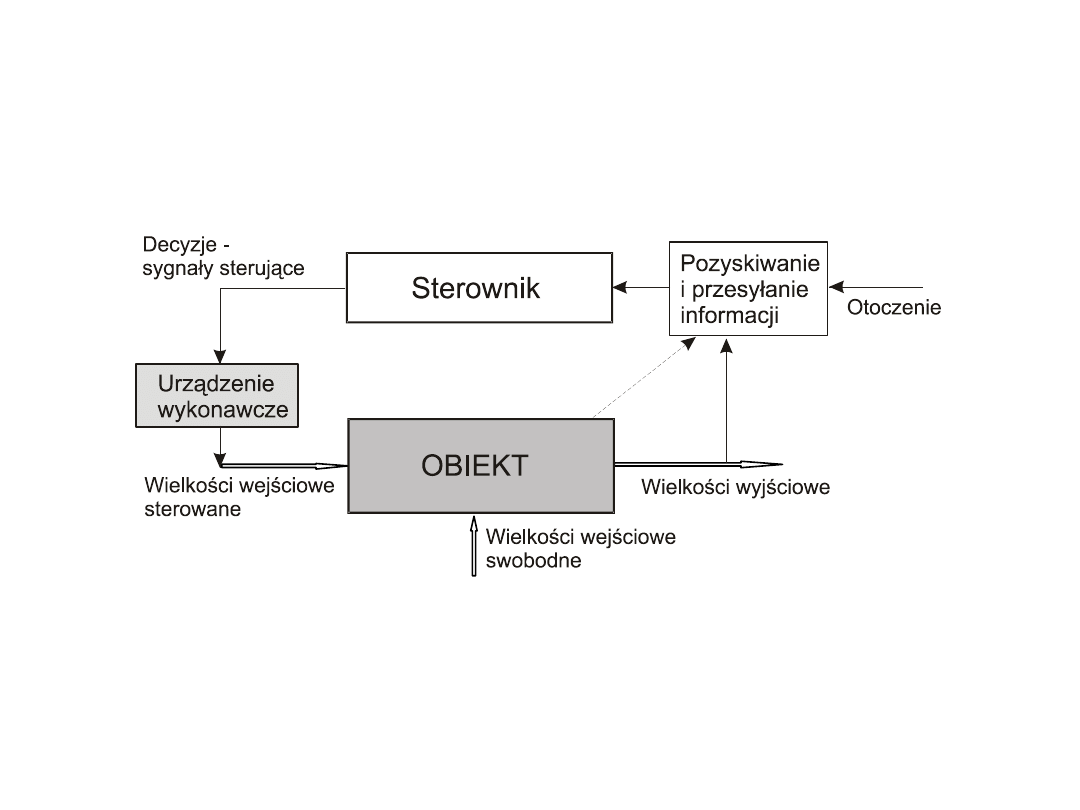
Układy regulacji; decyzje dotyczą wejść sterowanych w
postaci wielkości ciągłych, takich jak przepływy, napięcia,
prądy itp.; cel stanowi nadążanie odpowiednich wyjść obiektu
(wielkości wyjściowych procesu sterowanego) za zadanymi
przebiegami, w szczególnym przypadku stabilizacja tych wyjść na
zadanych wartościach; przykłady: stabilizacja temperatury w
pomieszczeniu, stabilizacja temperatury przepływającej wody w
podgrzewaczu, stabilizacja prędkości obrotowej turbiny,
naprowadzanie lufy działa na cel o zmieniającym się położeniu
(regulacja nadążna).
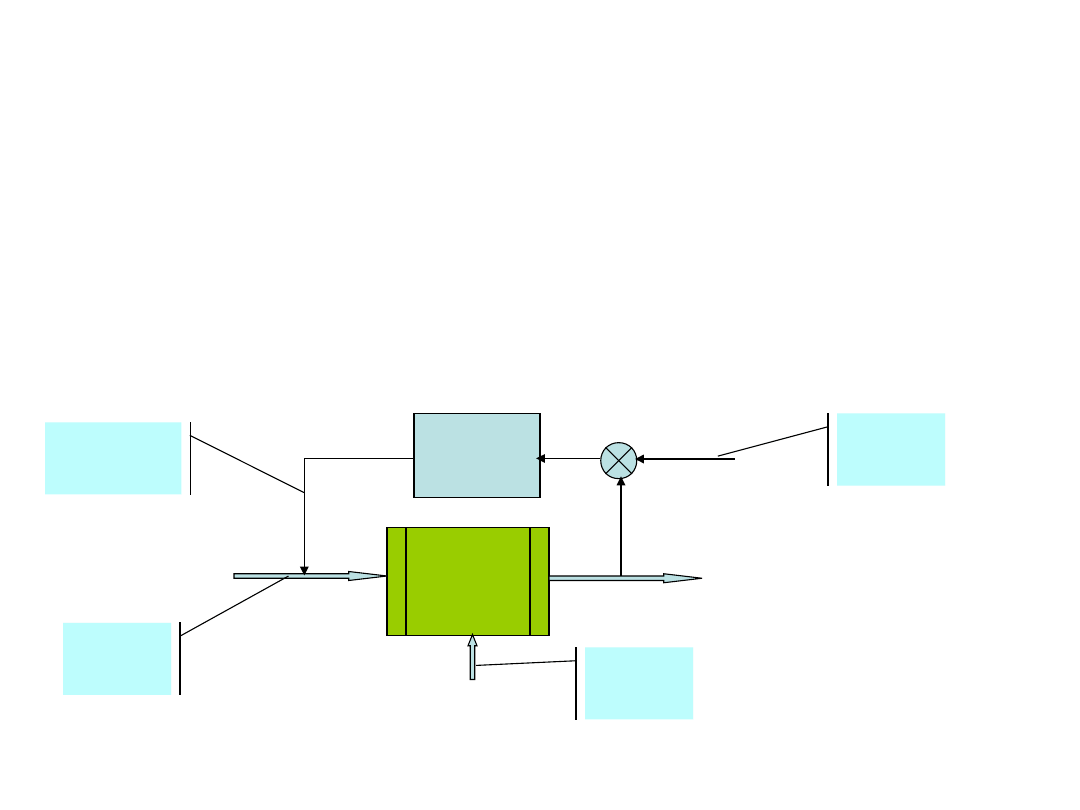
Regulator
+
-
Wartość
zadana
Wejścia
sterowan
e
Wejścia
swobodne
Obiek
t
Sterowani
e
Regulacja obiektów ciągłych może być realizowana jako:
Regulacja ciągła – zmienna wyjściowa regulatora jest ciagła,
tzn. może przyjmować dowolną wartość z odpowiedniego
zakresu,
Regulacja dwupołożeniowa – zmienna wyjściowa regulatora
może przyjmować jedną z dwóch możliwych wartości, lub
trójpołożeniowa -- zmienna wyjściowa regulatora może
przyjmować jedną z trzech możliwych wartości,
Regulacja krokowa – tzn. trójpołożeniowa z korekcją, jest to
sposób (przybliżony) realizacji regulacji ciągłej z elementem
wykonawczym trójpołożeniowym (tani element
wykonawczy).
Do regulacji można także, w szerszym sensie, nawiązywać
wprowadzając tzw. regulację ekstremalną, będącą w istocie
eksperymentalnym poszukiwaniem najlepszego punktu
pracy dla obiektu w stanie ustalonym.
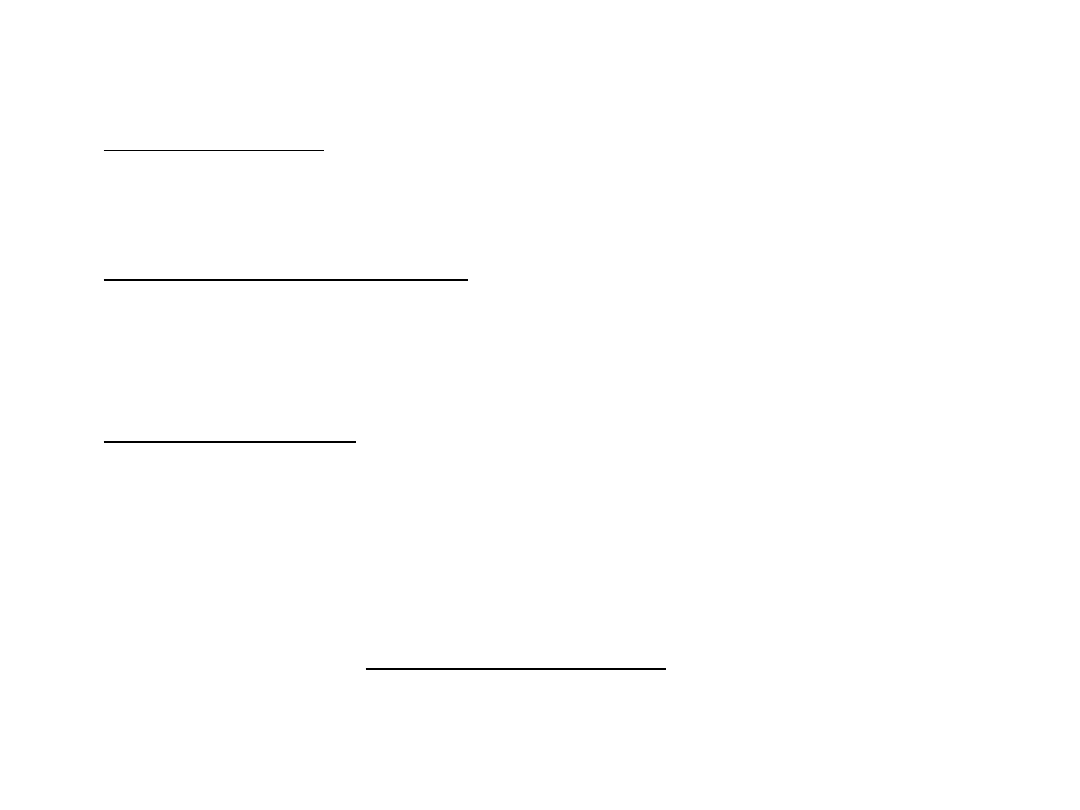
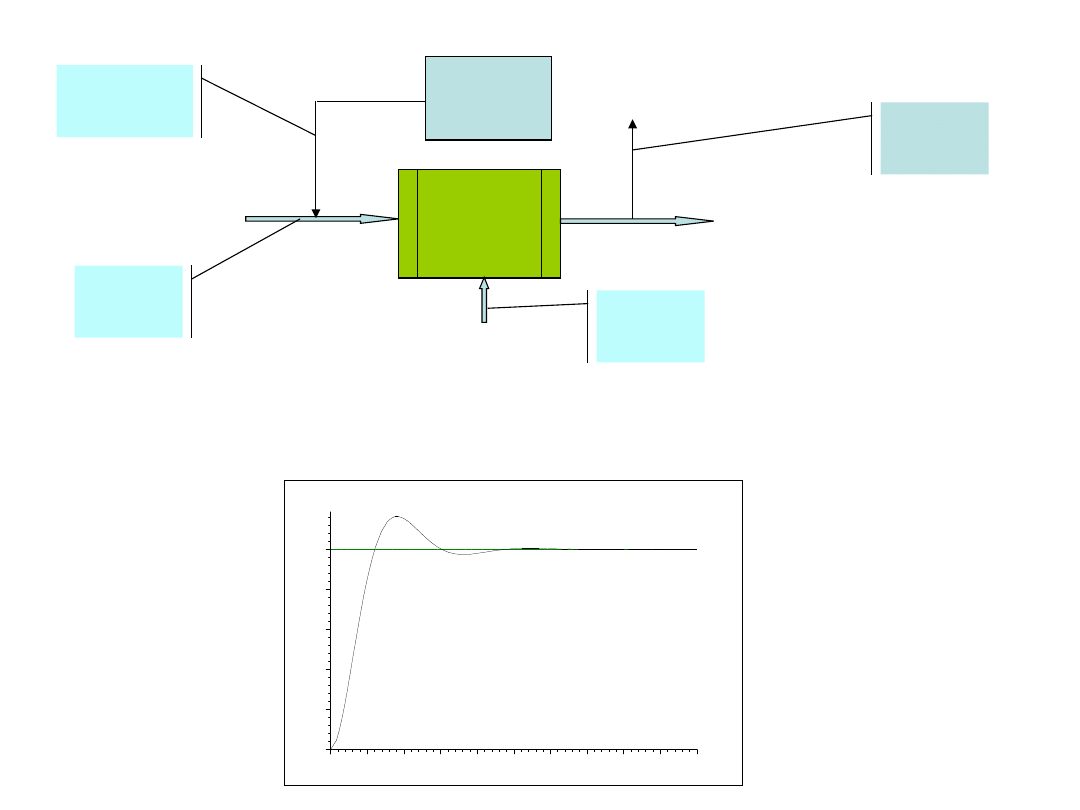
Temperatura T jest zmienną regulowaną,
Sygnał u sterujący siłownikiem zmieniającym położenie
zaworu jest zmienną sterującą,
Natężenie przepływu F
we
oraz temperatury T
we
i T
g
są
wielkościami swobodnymi, niesterowanymi („zakłóceniami”).
Zależność (model):
Przykład – wymiennik ciepła
))
(
,
,
,
),
(
(
)
(
0
,
,
,
,
0
0
0
0
t
T
T
T
F
u
F
f
t
T
t
t
we
t
t
g
t
t
we
t
t
g
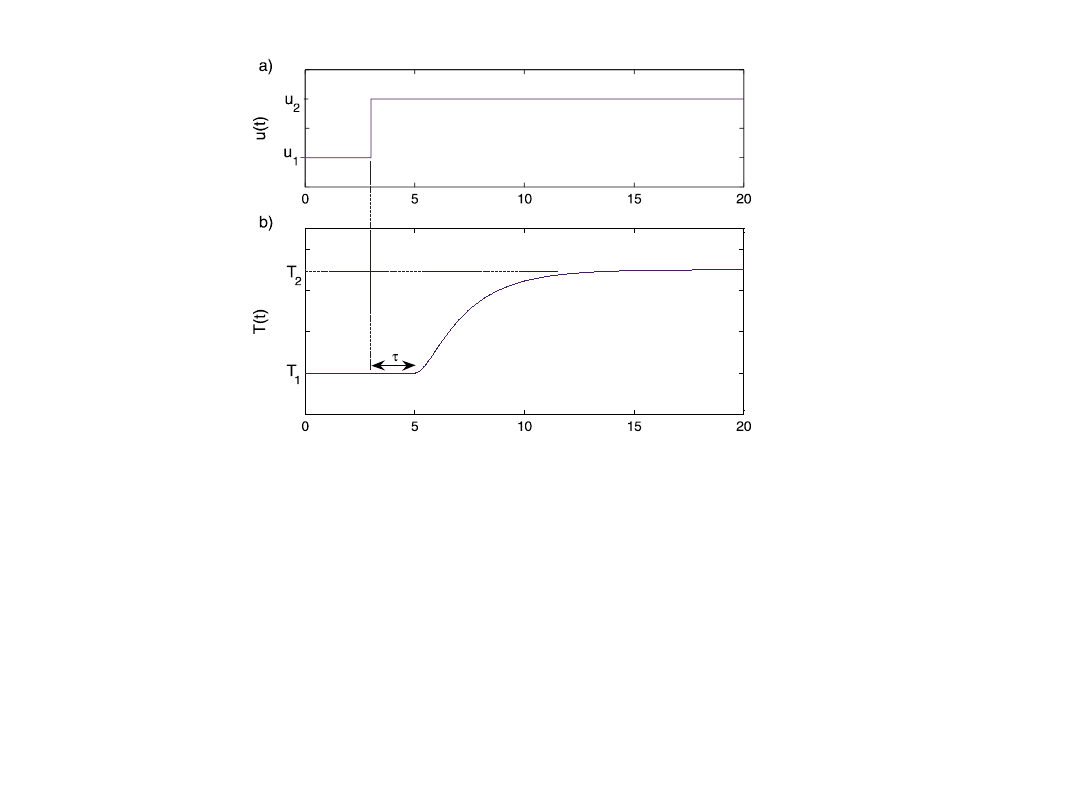
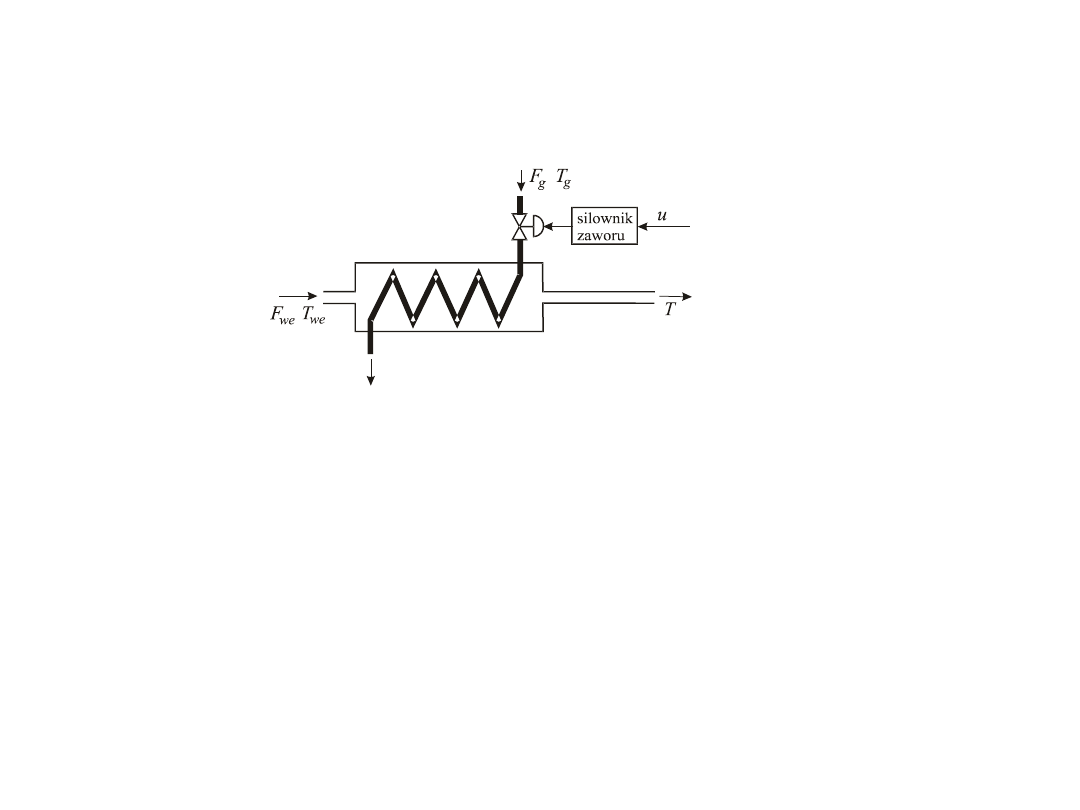
Skokowy przebieg sterowania u(t) (górna
krzywa) i odpowiadający mu przebieg
temperatury wyjściowej T(t) obiektu - tzw.
odpowiedź skokowa
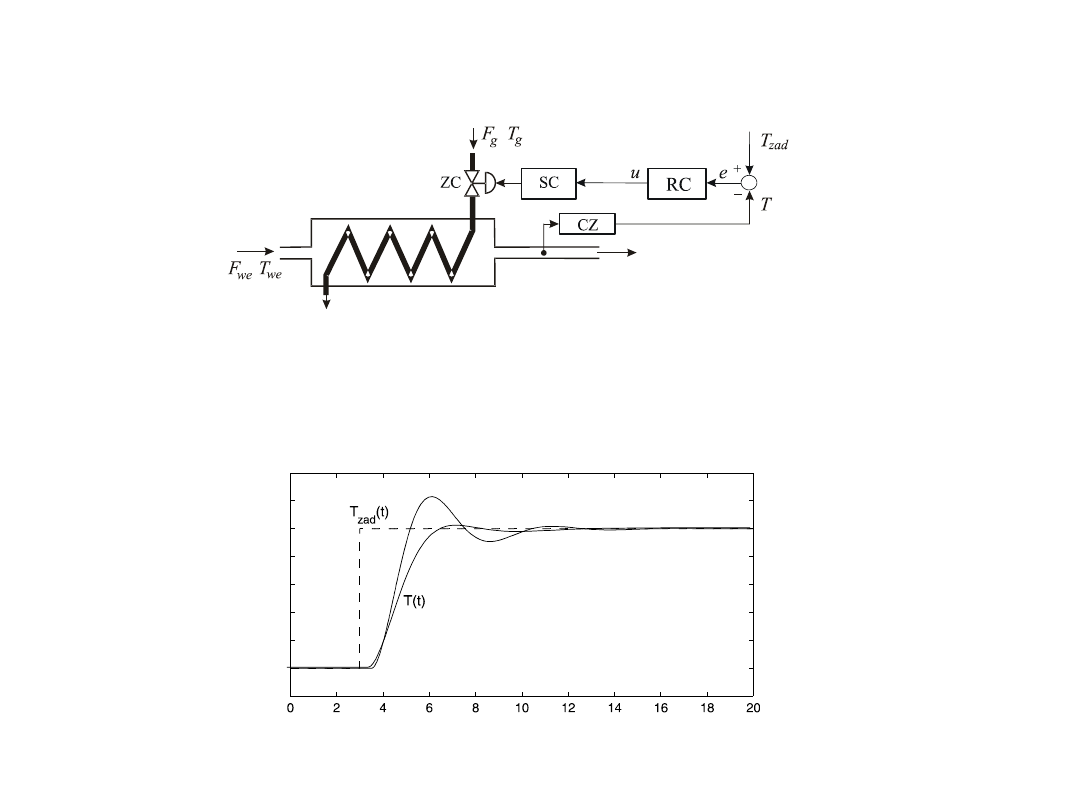
RC – regulator ciągły, np. PI lub PID
Regulacja
ciągła
Reg. PI
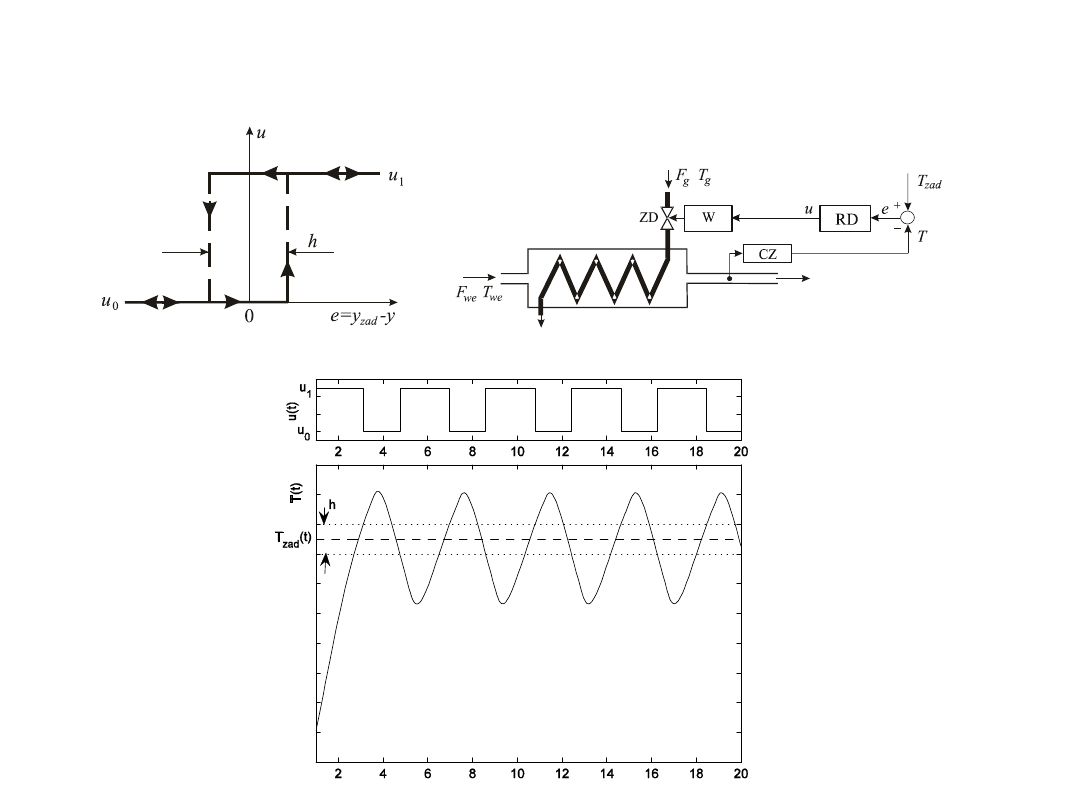
Regulacja dwupołożeniowa
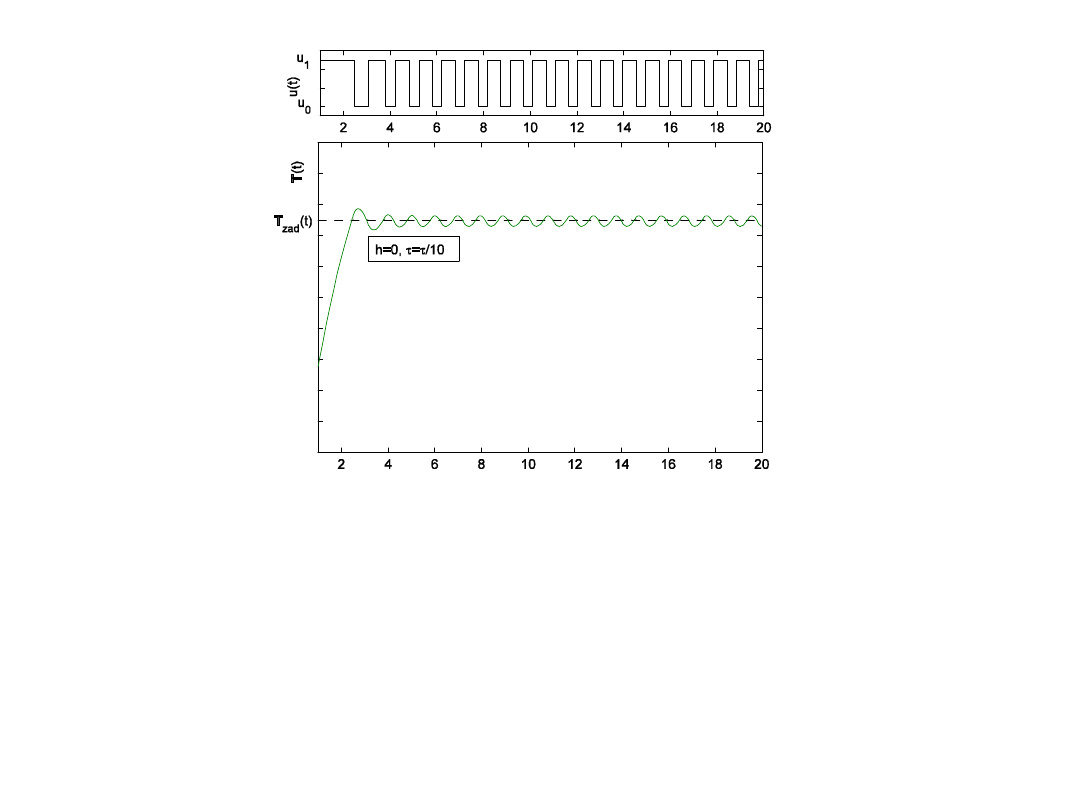
Przebiegi w układzie regulacji dwupołożeniowej z
zerową strefą histerezy, z obiektem o charakterystyce
skokowej z dziesięciokrotnie mniejszym, od
poprzedniego, opóźnieniem τ.
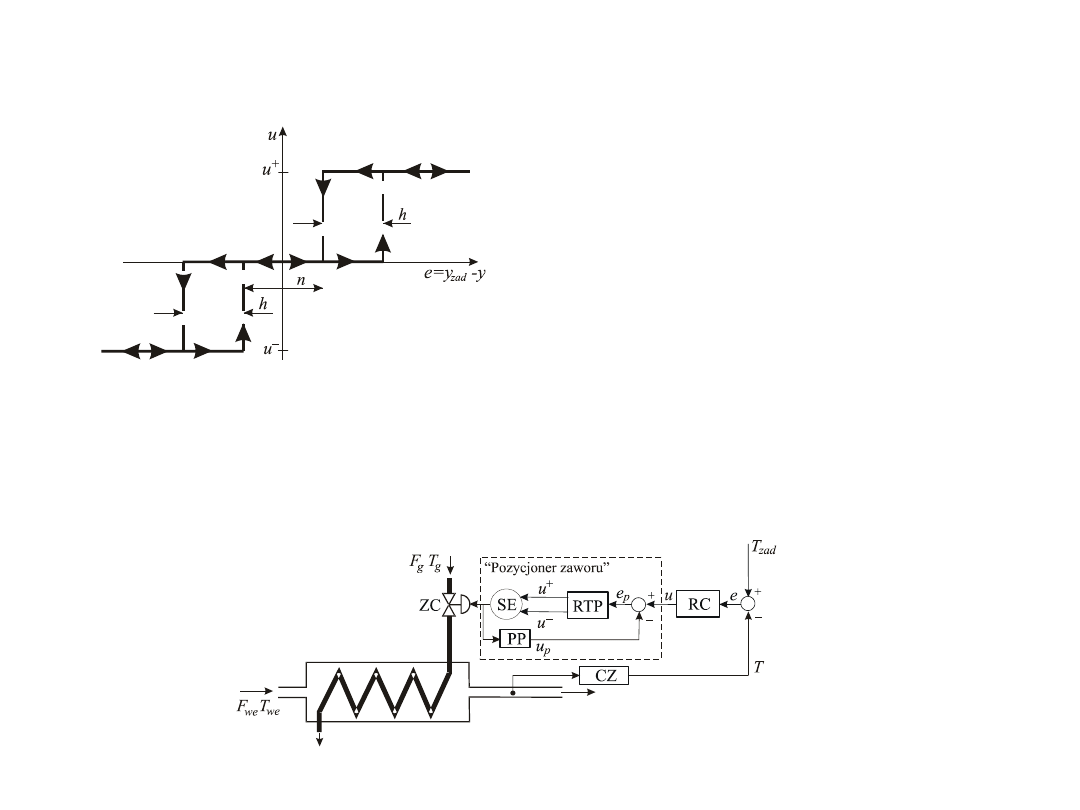
Regulacja trójpołożeniowa, trójpołożeniowa z korekcją
Charakterystyka elementu
trójpołożeniowego (RTP)
(h – szerokość stref
histerezy, n – szerokość
strefy nieczułości).
Wykorzystanie RTP w układzie regulacji ciągłej do pozycjonowania
zaworu, jeśli siłownik powinien być pobudzany sygnałem o dużej
wartości (np. wobec tarcia statycznego pomiędzy elementami
zaworu).
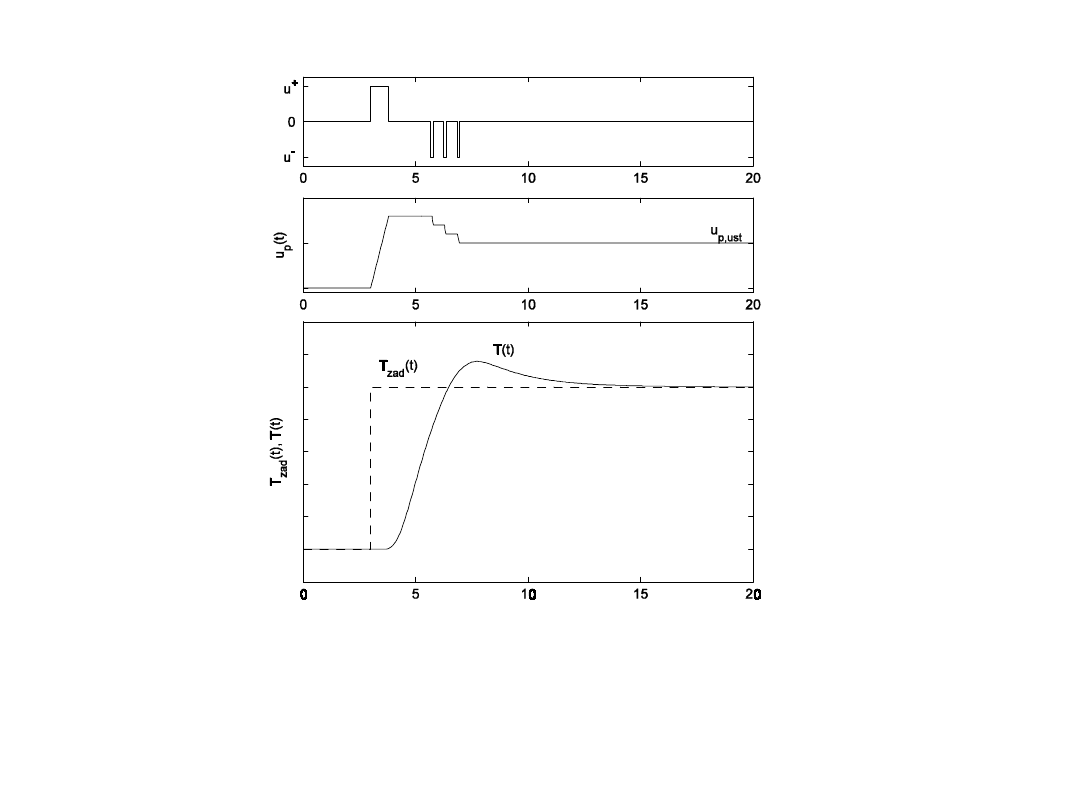
Działanie regulatora krokowego
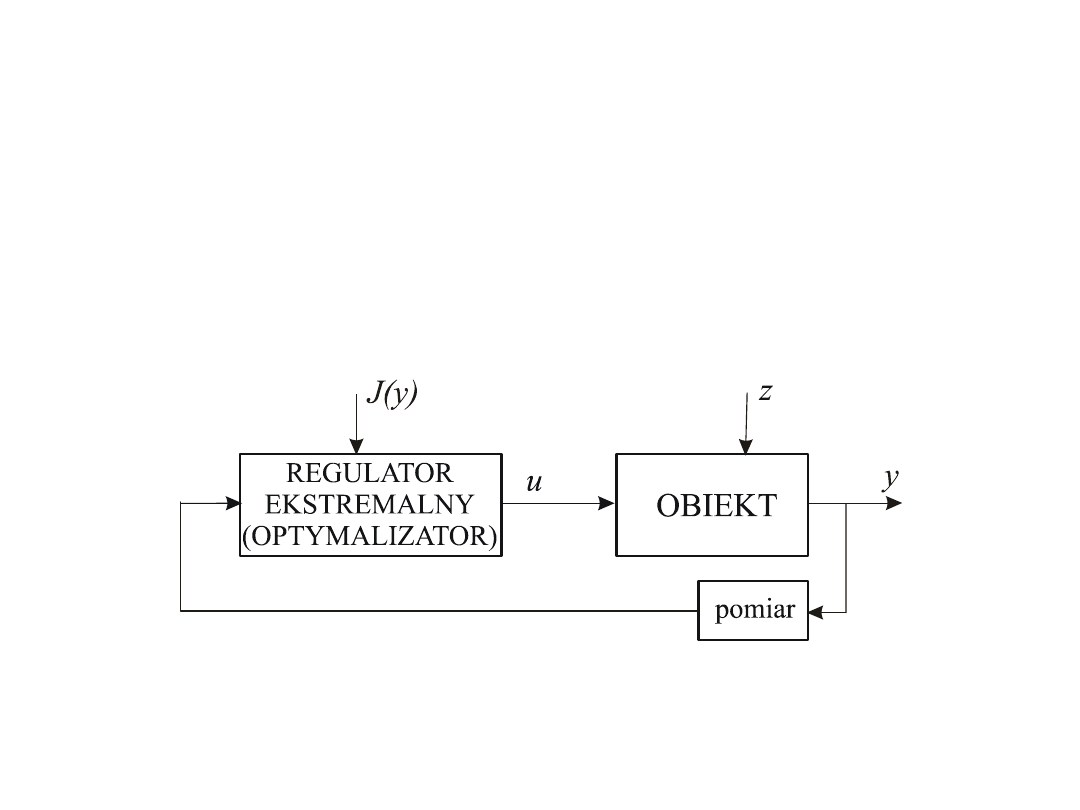
Regulacja ekstremalna
Regulacja ekstremalna stanowi szczególny przypadek układu
sterowania ze sprzężeniem zwrotnym, w którym celem
działania regulatora jest wyznaczanie sygnałów sterujących
obiektem w taki sposób, aby maksymalizować (lub
minimalizować, co jest równoważne, bo minJ(y) = -max(-J(y) )
pewną funkcję, zwaną funkcją jakości działania układu.

Czy projektowanie układu regulacji jest łatwe?
Tak…, jeśli potrafimy odpowiednio opisać i zrozumieć
działanie obiektu i regulatora oraz będziemy wiedzieli w jaki
sposób spełnić określone wymagania (stabilność, dokładność,
mała wrażliwość na niedokładną znajomość parametrów
obiektu oraz na wpływ zakłóceń zewnętrznych).
u
Wejścia
sterowan
e
Wejścia
swobodne
z
Obiek
t
Sterowanie
u
Obiekt: równanie ruchu y’’+y’+y=u
(prosty typowy obiekt
drugiego rzędu
Sterowanie w układzie otwartym, u= 10, wartość zadana r = 10
r=10
y(0)=0,
y’(0)=0
Uwagi:
1. Brak uchybu
ustalonego
2. Niewielkie
przeregulowanie
Ale…
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
t
wyjście
mierz. y
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
Przypuśćmy, że w rzeczywistości obiekt
zachowuje się zgodnie z nieco innym opisem,
np.:
y’’+1.1y’+y = 0.9u + 0.3z
a) u =10, z =0
b) u=10, z=-4
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
Uwagi:
1. Układ otwarty jest wrażliwy na
zmianę, nawet niewielką, parametrów
obiektu; źle działa w przypadku błędu
w identyfikacji (lub zmiany)
parametrów – duży uchyb w stanie
ustalonym.
2. Duża wrażliwość na zmiany wejścia
swobodnego (zakłócenia) z.
Spróbujmy, bez wnikania w materię
rzeczy, projektować regulator
stosując podejście ad hoc.
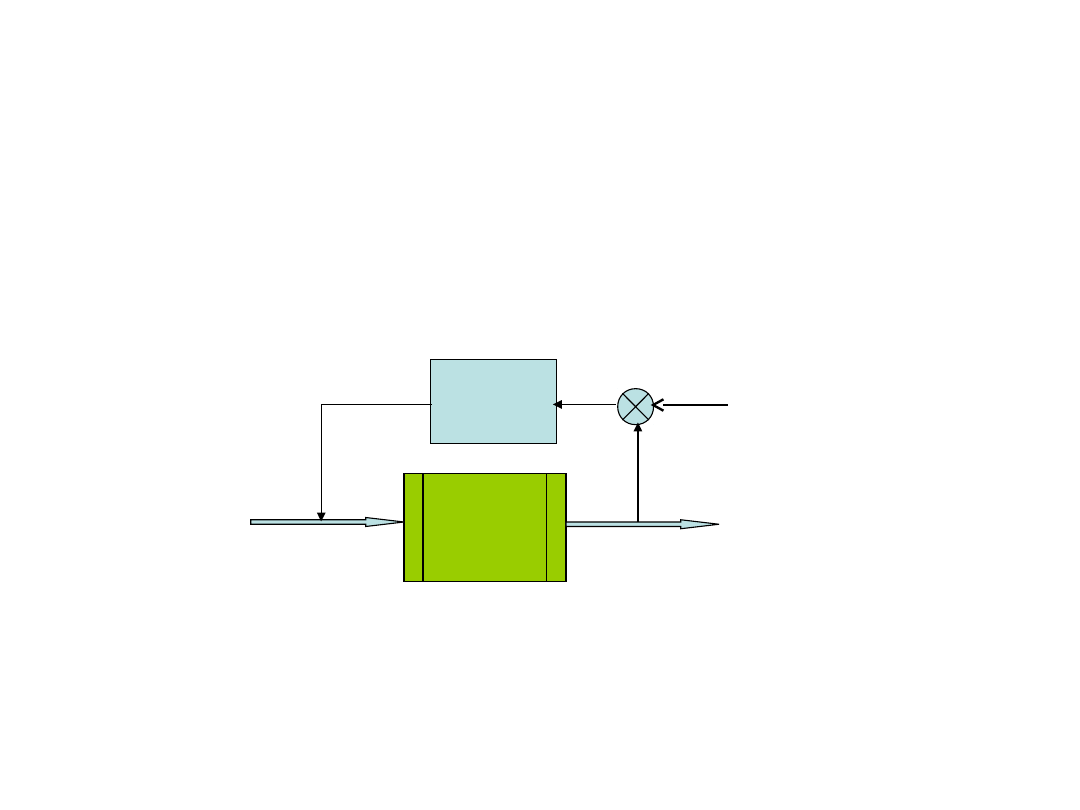
Regulat
or
+
-
Obiek
t
Regulat
or
wzm. K
+
-
Wartość
zadana r
Wejścia
sterowan
e
Obiek
t
Sterowanie
u
wyjście
mierz. y
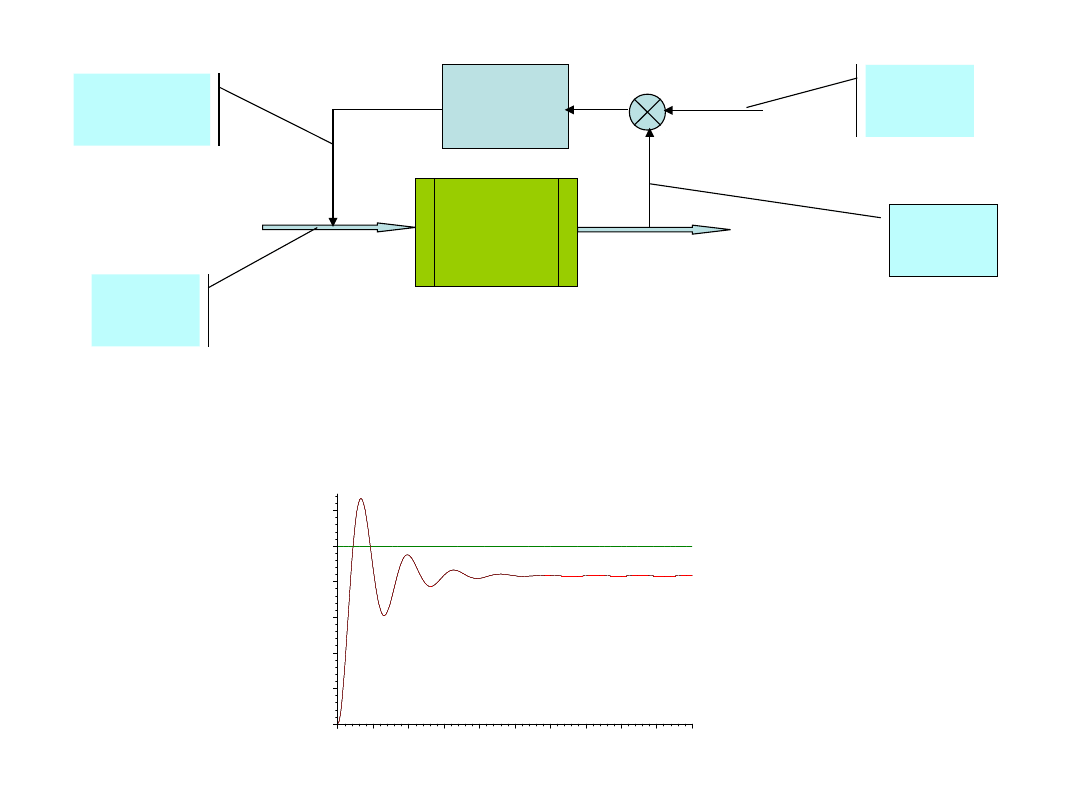
Obiekt: y’’+y’+y=u Regulator: u=K(r-y)
(Typ P)
r=10
K=5
y(0)=0,
y’(0)=0
Uwagi:
1. Uchyb ustalony
ponad 15%,
y(12)= 8. 3535
2. Wyraźne
oscylacje
0
2
4
6
8
10
12
2
4
6
8
10 12 14 16 18 20
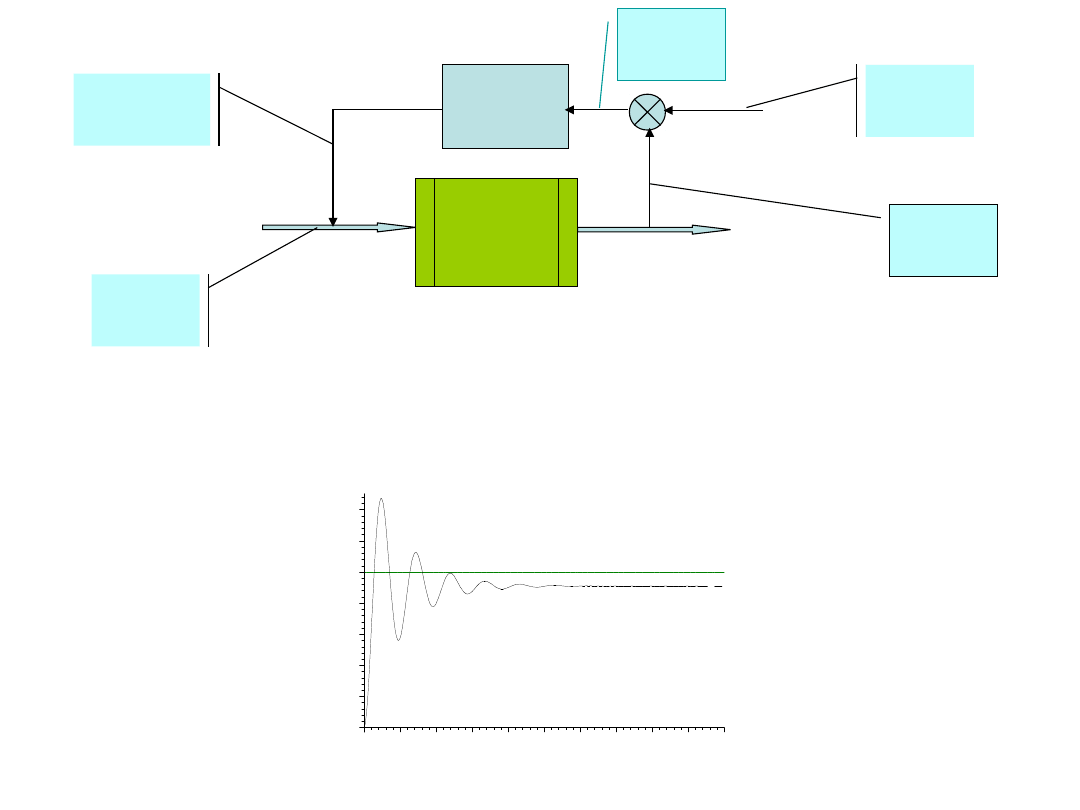
Regulat
or
wzm. K
+
-
Wartość
zadana r
Wejścia
sterowan
e
Obiek
t
Sterowanie
u
e=r-y
wyjście
mierz. y
Obiekt: y’’+y’+y=u Regulator:
u=K(r-y)
r=10
K=10
y(0)=0,
y’(0)=0
0
2
4
6
8
10
12
14
2
4
6
8
10 12 14 16 18 20
Uwagi:
1. Uchyb ustalony
mniejszy, ok.
10%
2. Znaczne
oscylacje
(przeregulowani
e ponad 50%)
Regulat
or
wzm. K
+
-
Wartość
zadana r
Wejścia
sterowan
e
Obiek
t
Sterowanie
u
wyjście
mierz. y
Obiekt: y’’+y’+y=u Regulator:
u=K(r-y)
r=10
K=40
y(0)=0,
y’(0)=0
Uwagi:
1. Uchyb ustalony
mały, ok. 2.5%,
y(12)= 9.
7457
2. Duże oscylacje
(przereg. ok.
80%)!
0
2
4
6
8
10
12
14
16
2
4
6
8
10 12 14 16 18 20
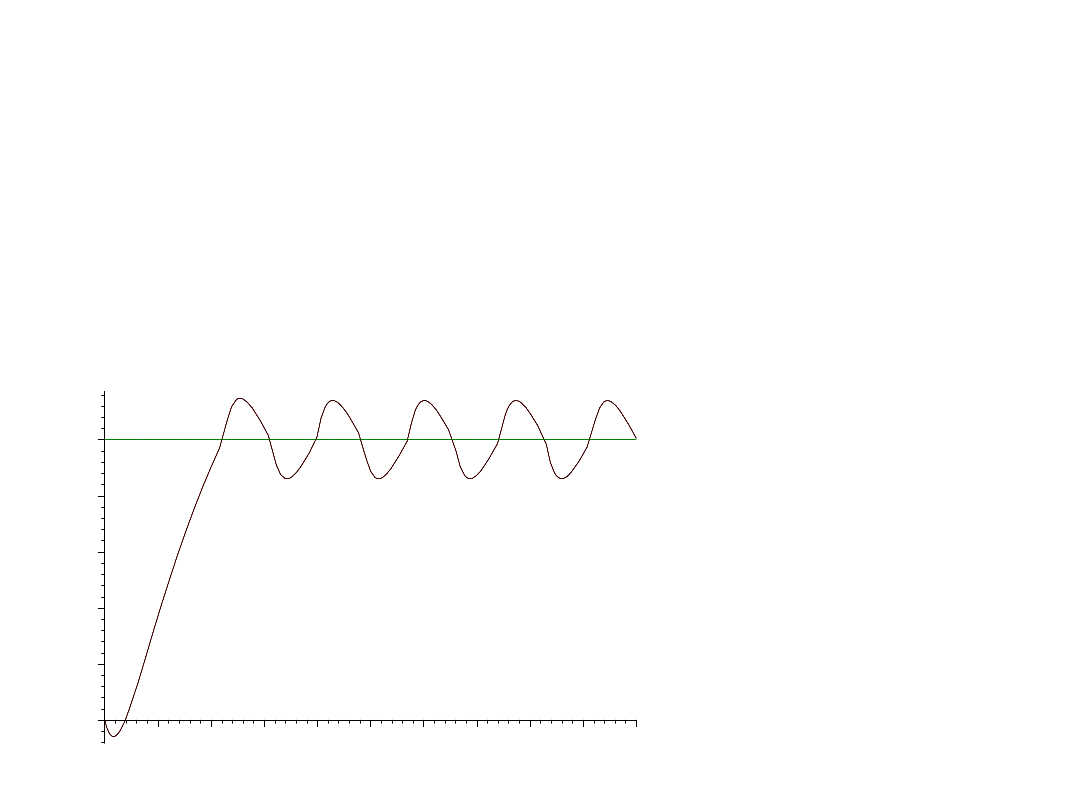
Obiekt: y’’+y’+y=u Regulator:
PI: u(t) =
K(e+(1/T
I
)∫edτ)
r =10; K = 2, T
I
=2
0
2
4
6
8
10
12
2
4
6
8
10 12 14 16 18 20
Uchyb ustalony zerowy, ale regulacja niezbyt szybka i znaczne
oscylacje.
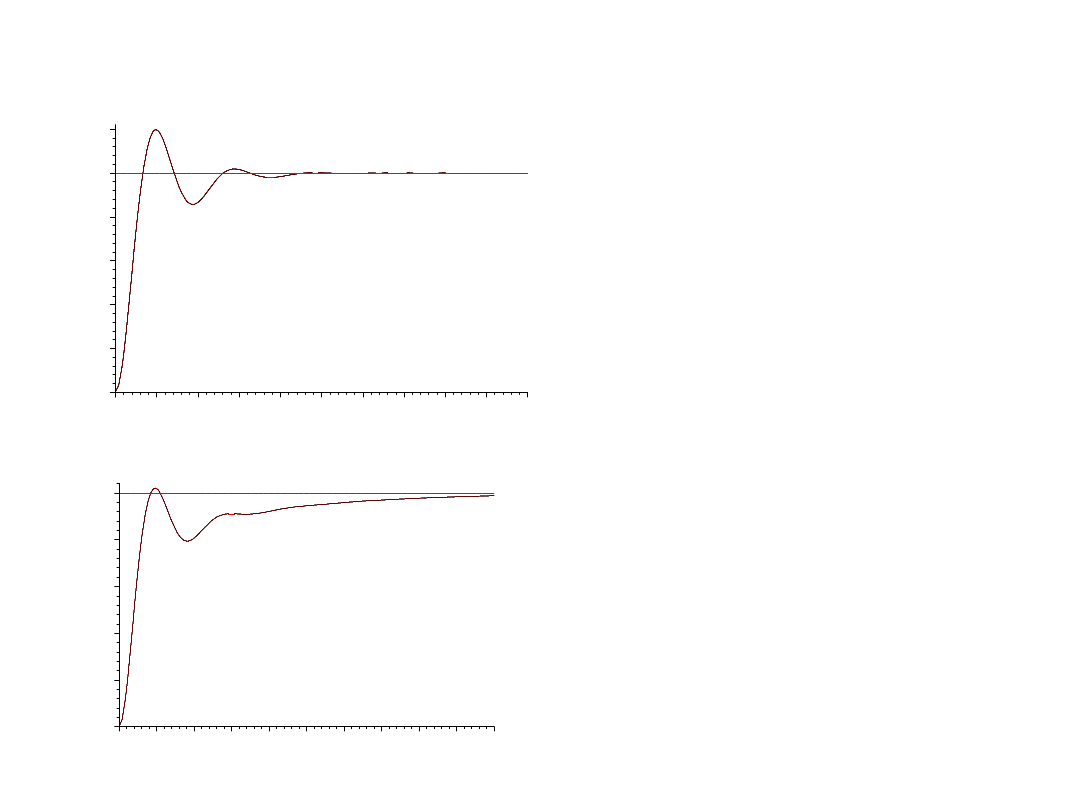
Niech
r =10; K = 2.5, T
I
=2, T
D
= 0.2
Powiedzmy, że może tak być.
Spróbujmy j.w., tylko T
I
=
5
Powolna regulacja,
„brzydki” przebieg
przejściowy.
0
2
4
6
8
10
12
2
4
6
8
10 12 14 16 18 20
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
Spróbujmy zastosować
regulator
PID:
u(t) = K(e+(1/T
I
)∫edτ +
T
D
de/dt
)
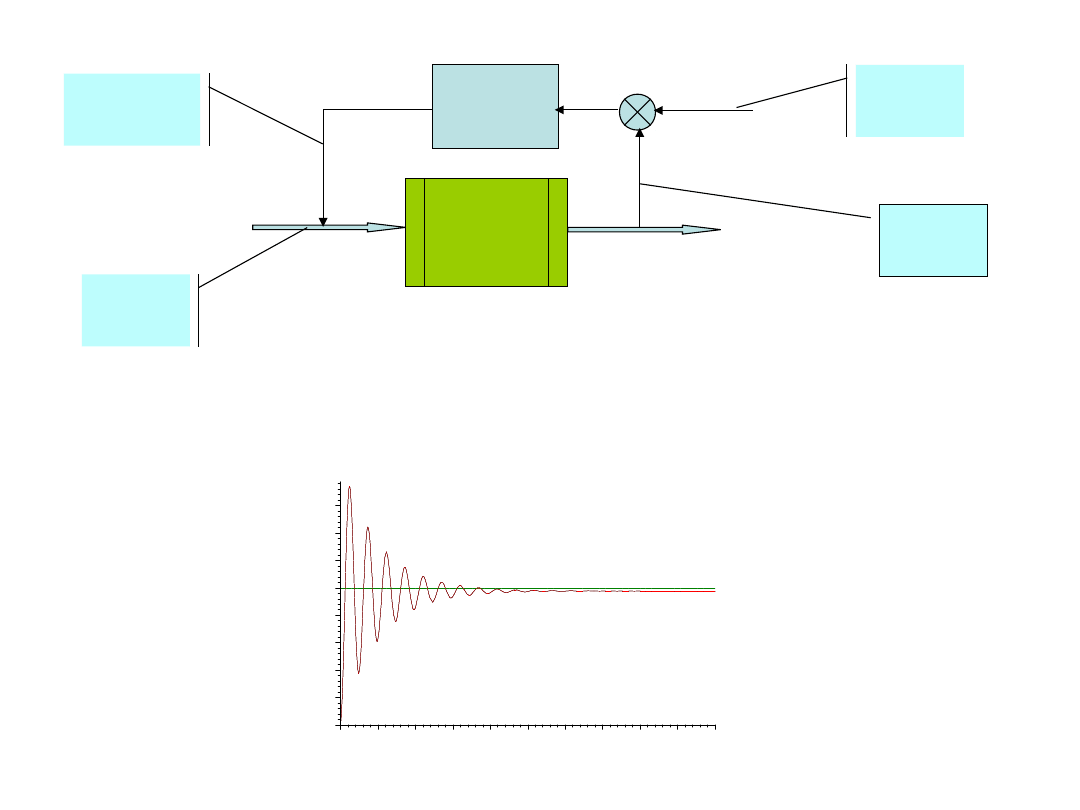
(Obiekt: y’’+y’+y=u )
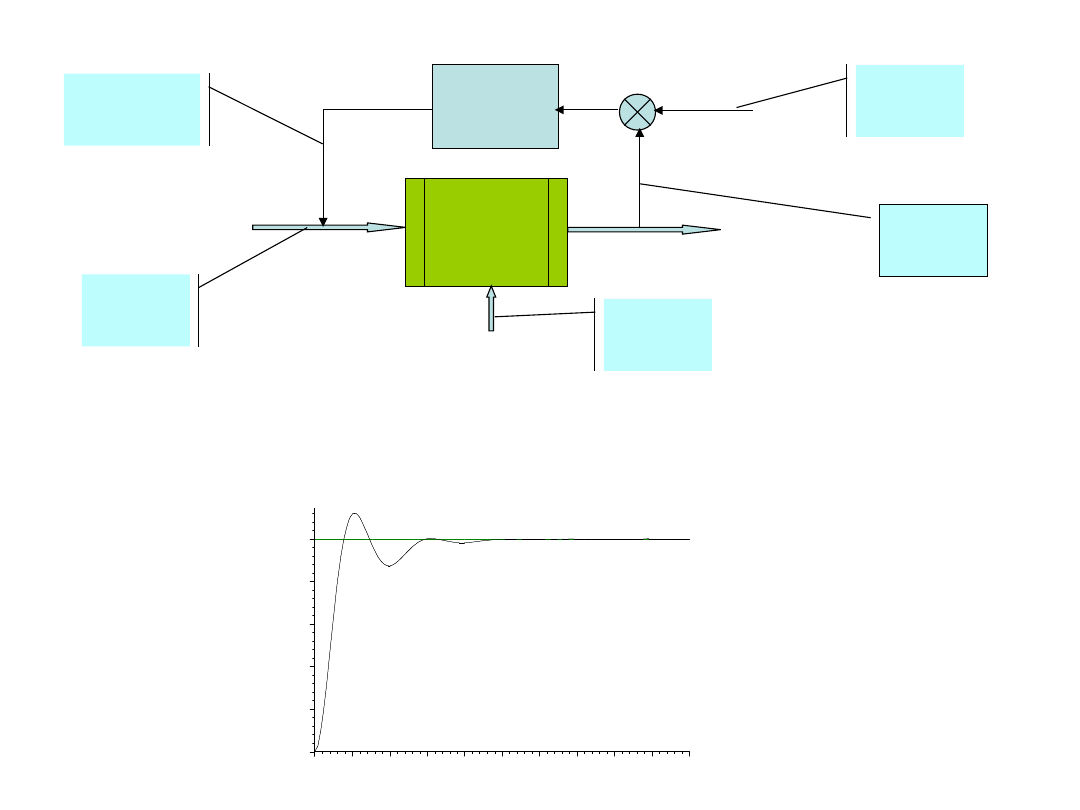
Regulat
or
PID
+
-
Wartość
zadana r
Wejścia
sterowan
e
Wejścia
swobodne
z
Obiek
t
Sterowanie
u
wyjście
mierz. y
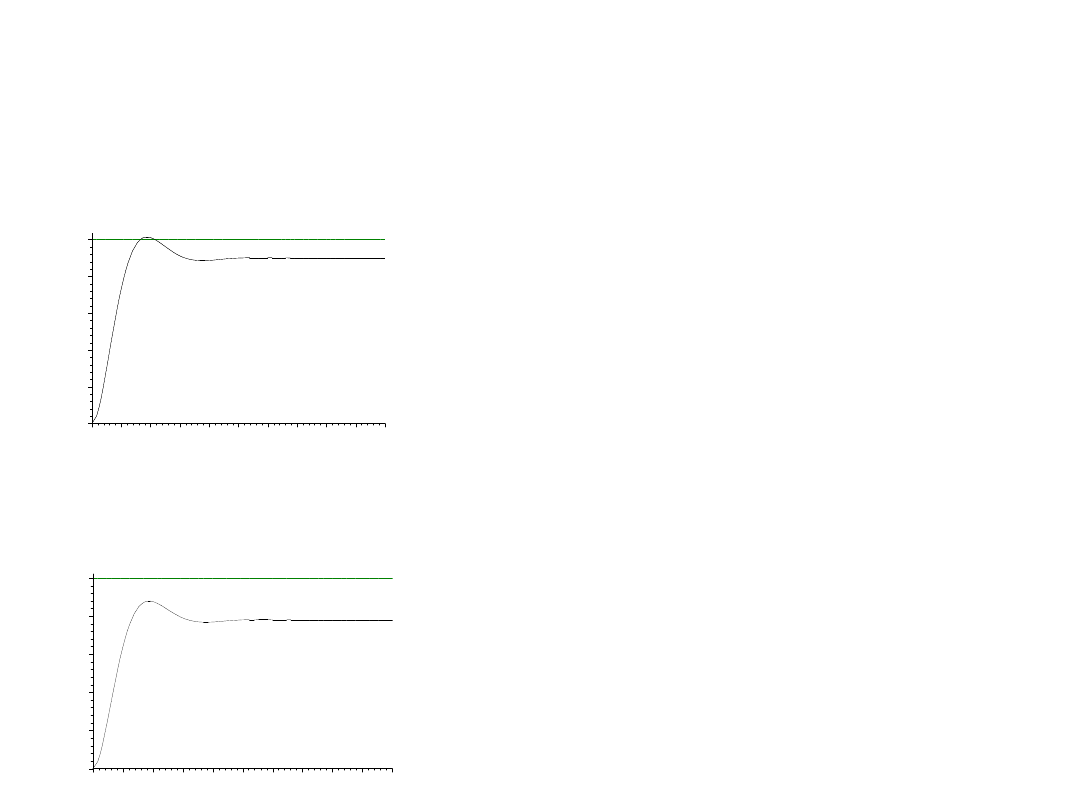
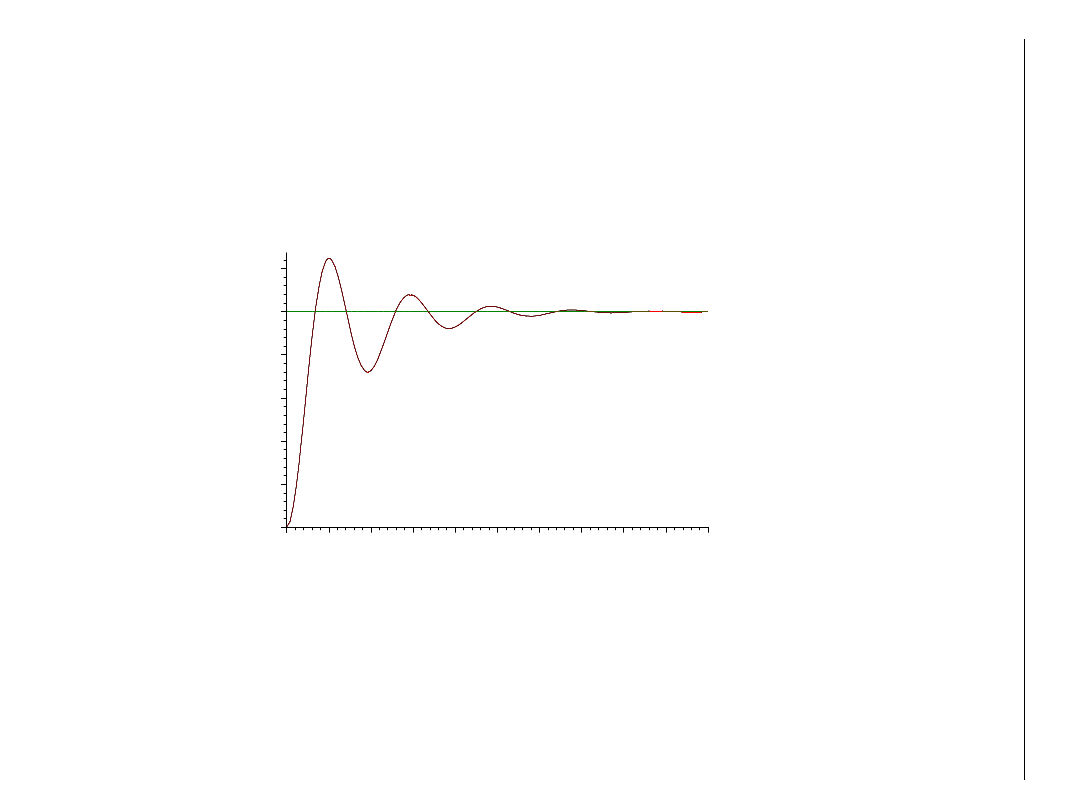
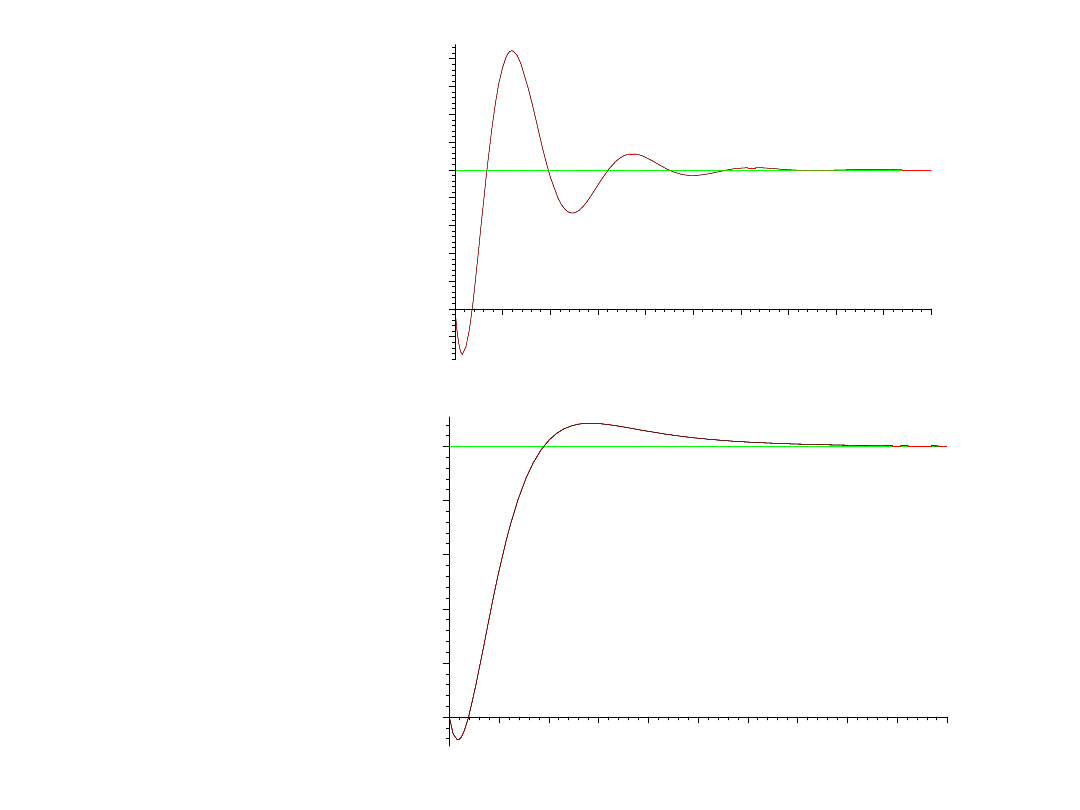
Obiekt: y’’+1.1y’+y=0.9u+0.3z ; Regulator: u=K[(r-y)+(1/T
I
)
∫(r-y)dτ-T
D
y’ ]
(Regulator PID)
r=10
z=-4
K=2.5
T
I
=2
T
D
=0.2
y(0)=0,
y’(0)=0
Uwagi:
1. Brak uchybu
ustalonego
2. Małe oscylacje
3. Niewrażliwy na
nawet dość
znaczne zmiany
parametrów
obiektu i
zakłócenia!
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20

Metodą prób i błędów udało się dobrać
niezły regulator typu PID; tym
niemniej, nie rozumiemy dobrze,
dlaczego takie, a nie inne nastawy są
właściwe.

Roważmy teraz inny prosty obiekt
T(dy/dt)+y(t) = Ku(t-T₀)
Jest to obiekt typowy (inercja z
opóźnieniem); występuje w wielu
prostych zastosowaniach.
Przykład: regulacja temperatury w
danym pomieszczeniu.
wartość zadana r =10,
obiekt typu (1/T)y’(t)+y(t) = u(t-T₀)
(transmitancja (e
sT₀
)/(Ts+1)),
aproksymowany transmitancją ((1-(T₀/2)s)/((1+(T₀/2)s)(Ts+1))).
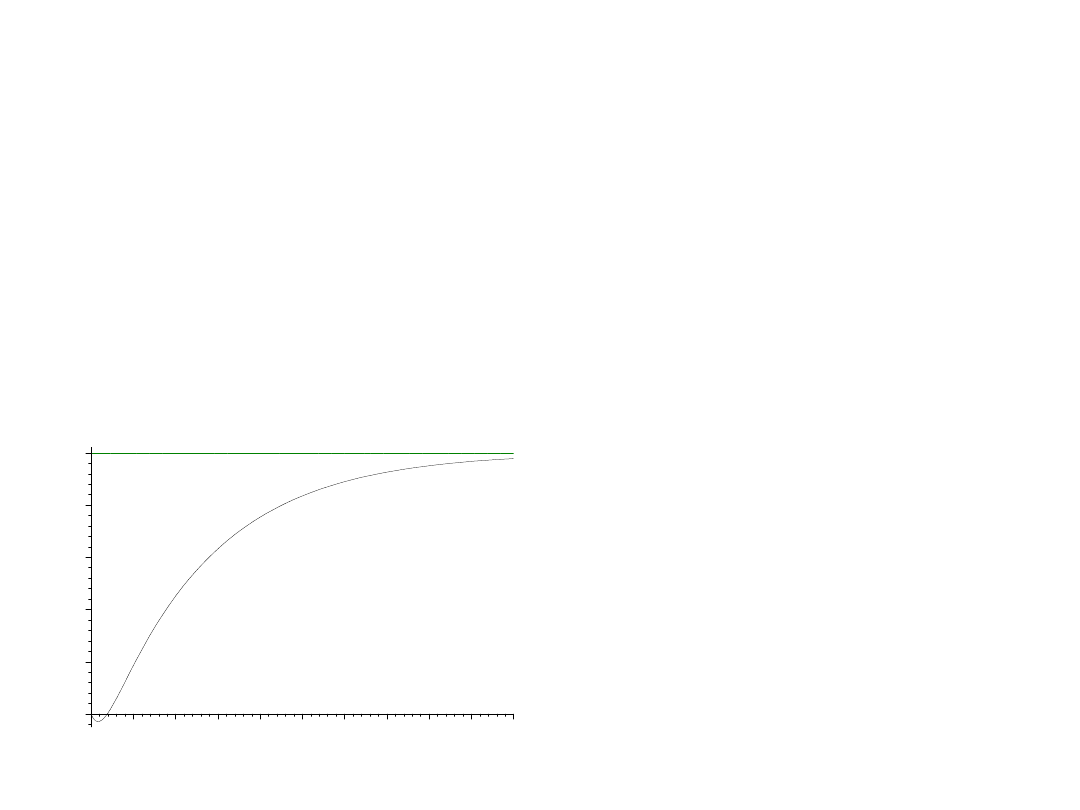
Opis obiektu aproksymowanego przy pomocy równań różniczkowych:
Tw′+w=((2T+T
0
)/(2T-T
0
))u,
T
0
x′+x= -(2T
0
/(2T-T
0
))u
T=5, T
0
=1
oraz y=x+w (y - wyjście);
Układ otwarty; u=10
Uwagi:
1. Powolne działanie
obiektu.
2. Układ wrażliwy na
zmiany parametrów
obiektu.
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
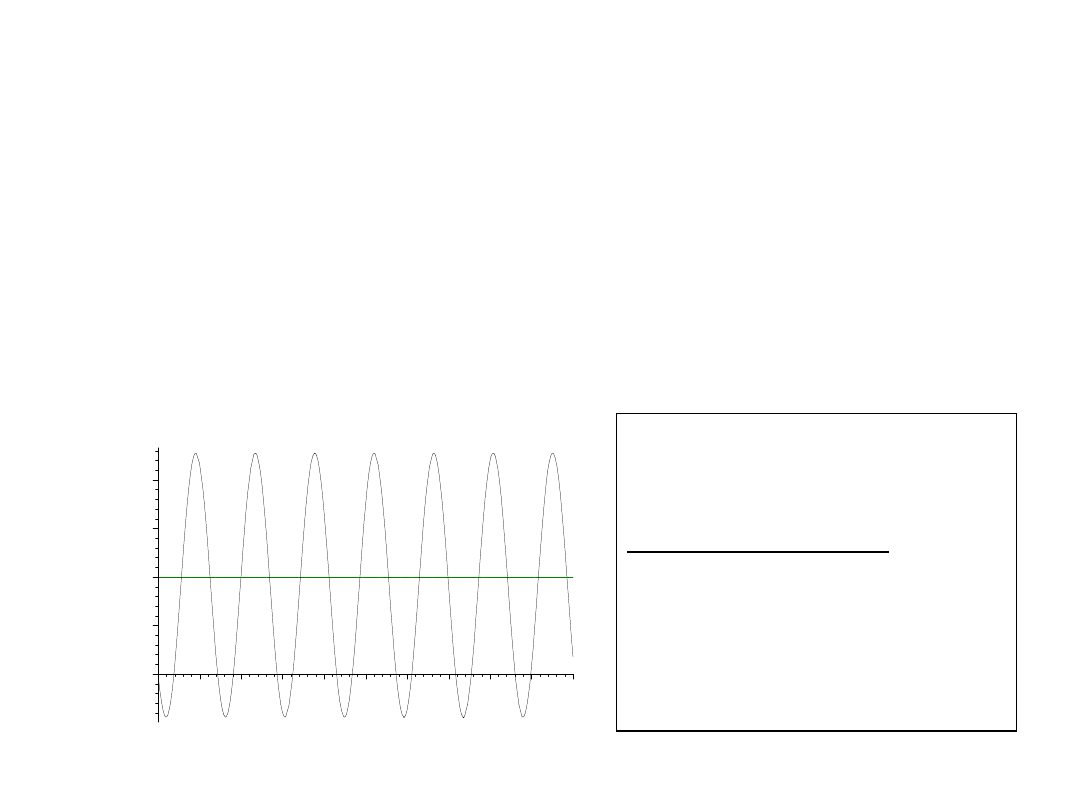
Regulacja dwupołożeniowa
; wartość zadana r =
10,obiekt typu
1/T)y’(t)+y(t)=u(t-T₀)
);
T=5, T
0
=1
(trans.
(e(-sT₀))/(Ts+1)),
(aproksymowany transmitancją ((1-(T₀/2)s)/((1+(T₀/2)s)(Ts+1))).
Opis obiektu aproksymowanego przy pomocy równań
różniczkowych: Tw′+w=((2T+T₀)/(2T-T₀))u, T
0
x′+x=-(2T₀/(2T-
T₀))u oraz y=x+w, y - wyjście);
Spróbujmy
Reg. dwupołożeniowy:
u = 20
jeśli
y≤10
oraz
u = 0
jeśli
y >10
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
Uwaga: Wyraźny
brak stanu
ustalonego!
Znaczne oscylacje.
Regulacja ciągła P, PI i PID
; wartość zadana r = 10,obiekt
typu ((e
{sT₀}
)/(Ts+1)) ( tj.
(1/T)((dy)/(dt))+y=u(t-T₀)
),
aproksymowany transmitancją ((1-(T₀/2)s)/((1+(T₀/2)s)(Ts+1))).
Opis obiektu aproksymowanego przy pomocy równań
różniczkowych: Tw′+w=((2T+T
0
)/(2T-T
0
))u, T
0
x′+x= -(2T
0
/(2T-T
0
))u
oraz y=x+w (y - wyjście); T=5, T
0
=1
Eksperyment Zieglera-Nicholsa: K
osc
=11, T
osc
=
2.5;
0
5
10
15
20
2
4
6
8
10 12 14 16 18 20
u = K(r-w);
regulator P
Eksperyment Z-N:
zwiększamy wartość K,
do wartości K
osc
, przy
której pojawiają się
drgania niegasnące (z
okresem T
osc
)
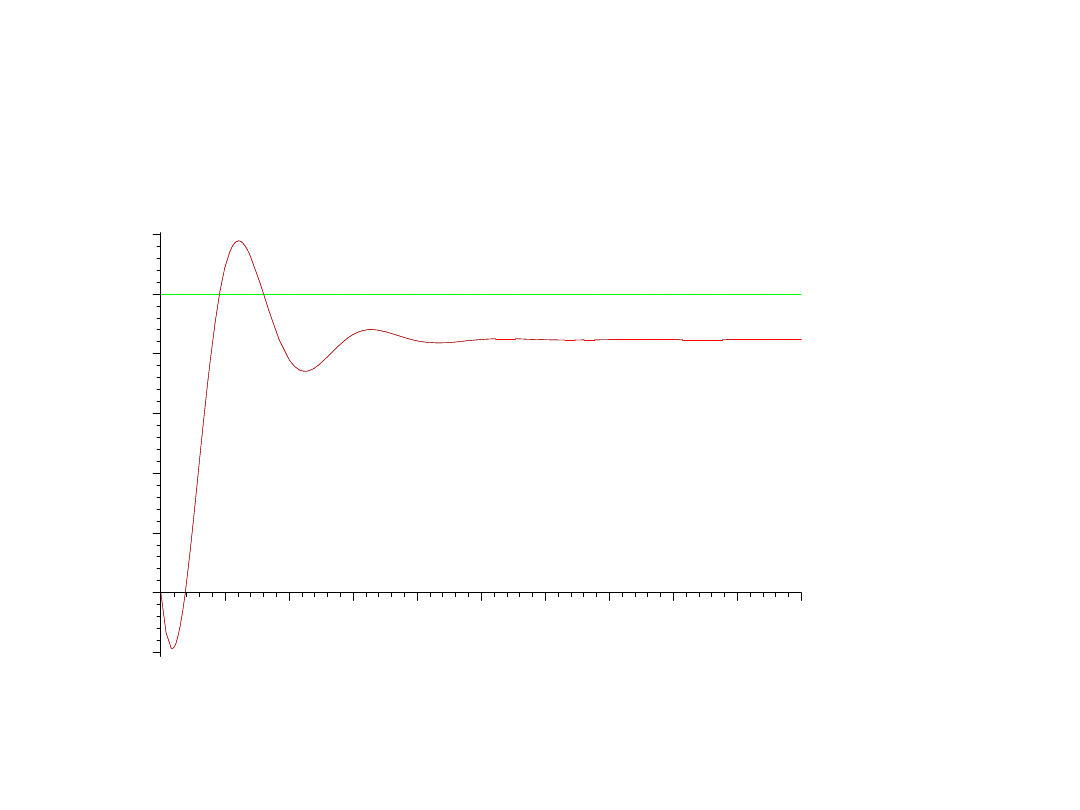
Regulator P; nastawa Z-N: Reguła:
K=0.5K
osc
Zatem
K=5.5
-2
0
2
4
6
8
10
12
2
4
6
8
10 12 14 16 18 20
Duży uchyb w stanie ustalonym.
Oscylacyjny przebieg
przejściowy.
-2
0
2
4
6
8
10
12
14
16
2
4
6
8
10
12
14
16
18
20
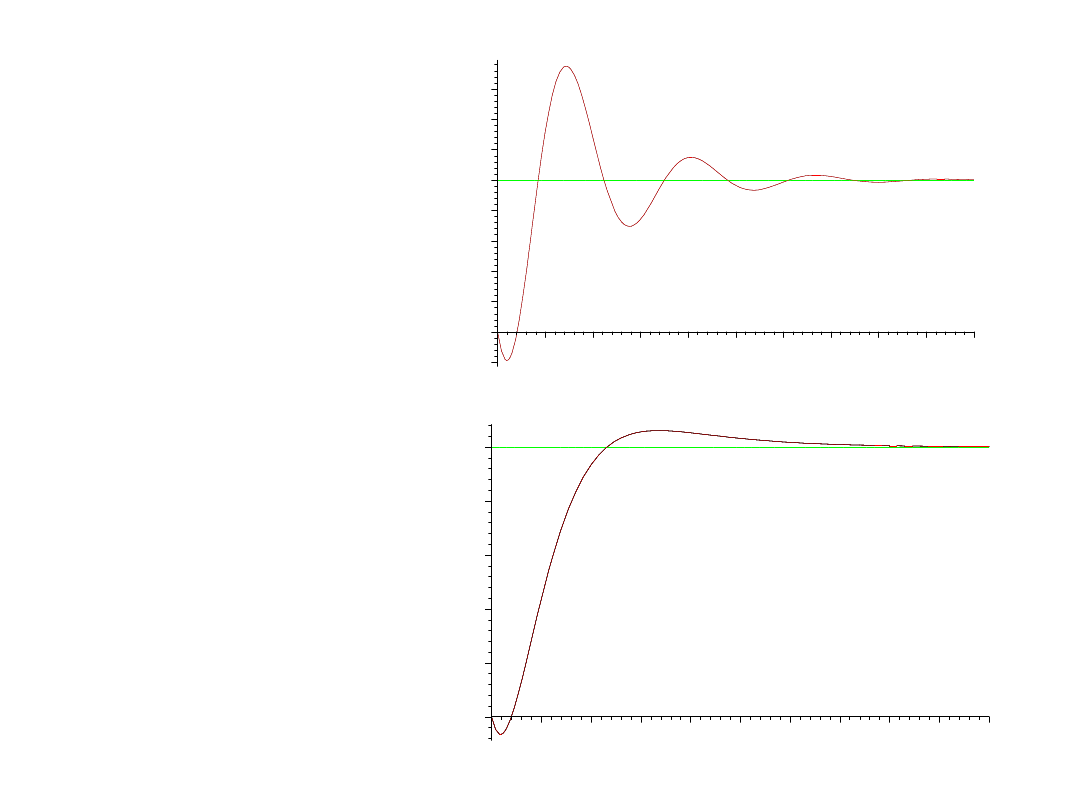
Reg. PI; nastawy Z-
N
:
Reguła:
K=0.45K
osc
,
T
I
= T
osc
/1.2
Zatem
K= 4. 95, T
I
= 2.
0833
Niestety, za duże
oscylacje!
Próbujemy ręcznej
korekty nastaw.
Korekta nastaw PI:
K=2, T
I
=4
Powolna (nieco)
regulacja.
0
2
4
6
8
10
2
4
6
8
10
12
14
16
18
20
Reg. PID;
nastawy Z-N:
Reguła:
K = 0.6K
osc
,
T
I
= T
osc
/2,
T
D
= T
osc
/8
Zatem
K=6.6, T
I
= 1.25,
T
D
=0.3152
Za duże oscylacje.
-2
0
2
4
6
8
10
12
14
16
18
2
4
6
8
10 12 14 16 18 20
0
2
4
6
8
10
2
4
6
8
10 12 14 16 18 20
Próbujemy ręcznej
korekty nastaw PID
(metoda „prób i błędów) ,
przykł. nastawy
skorygowane:
K=2.5, T
I
= 4, T
D
=
0.15625

Uzyskaliśmy stosunkowo niezły
regulator, aczkolwiek regulacja nadal
jest niezbyt szybka, ale… czy
możemy otrzymać lepszy? Dlaczego
takie a nie inne nastawy są właściwe?
Dlaczego taki a nie inny regulator?
Bez pogłębienia znajomości teorii nie
odpowiemy na te pytania.

Satelita; problem stabilizacji
kąta ustawienia w określonej
osi
Równanie ruchu:
y′′′+2y′′=1.8u
(transmitancja obiektu G(s)=((0.9)/(s²))(2/
(s+2)))
Próbujemy układ zamknięty z
regulatorem P
u=K(r-y)
; niech
r =5
,
równanie ruchu (układ zamknięty):
y′′′+2y′
′=1.8K(5-y); K=1
(trans. u. z. G
z
(s)=((1.8K)/(s³+2s²+1.8K)))
-1500
-1000
-500
0
500
1000
1500
10
20
30
40
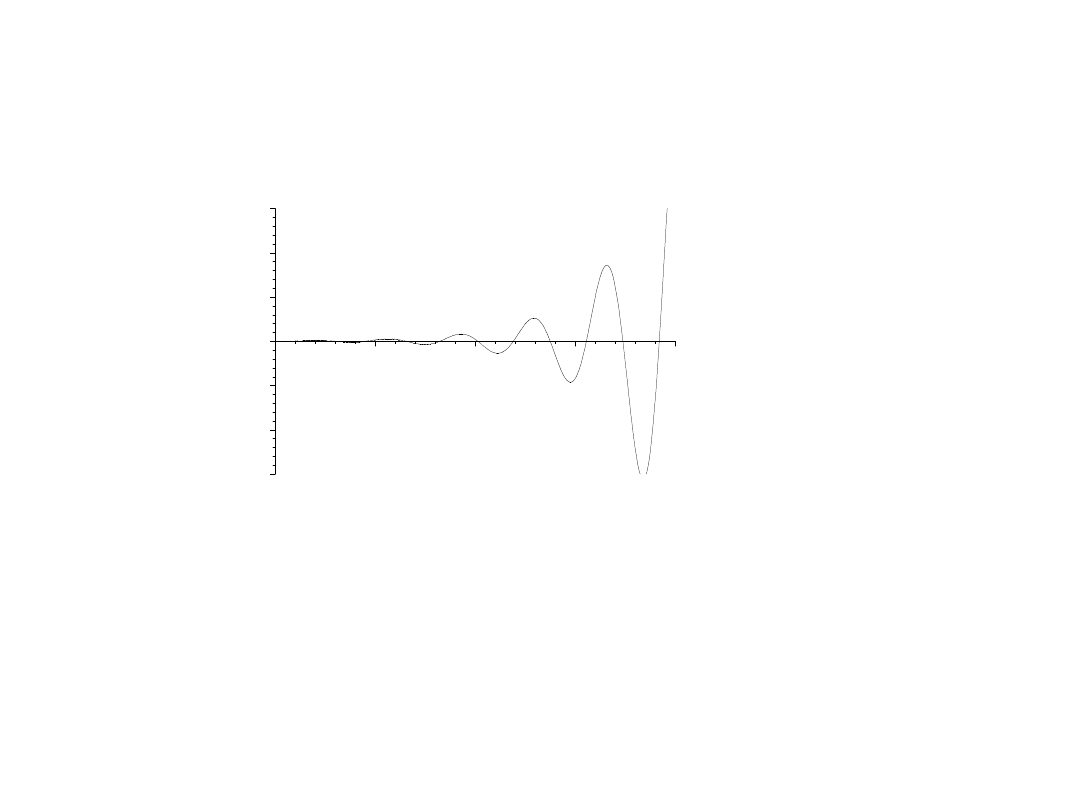
Symulacja rozwiązania
y′′′
+2y′′=1.8K(5-y); K=1
Układ niestabilny!
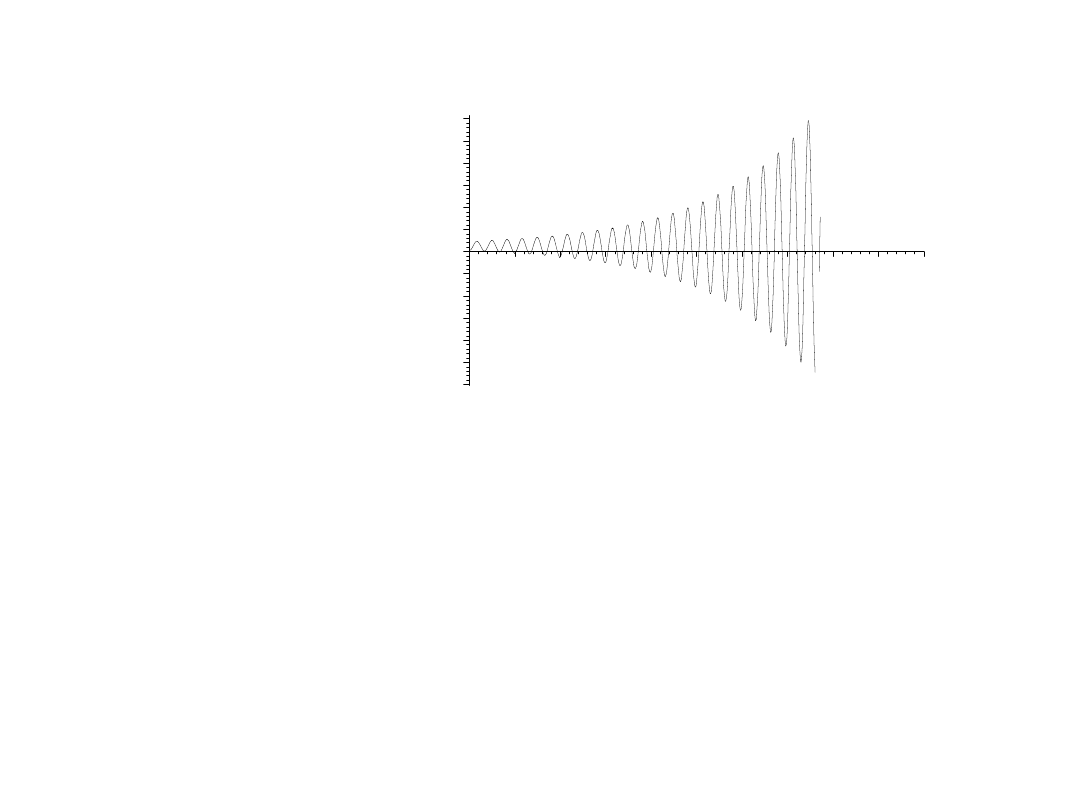
Spróbujmy K=0.01
-120
-100
-80
-60
-40
-20
0
20
40
60
80
100
120
200 400 600 800 100012001400160018002000
Także układ niestabilny. Jest on niestabilny dla dowolnego
K>0!
Nie możemy zastosować nastaw Zieglera-Nicholsa, bo, po
pierwsze, nie jest wykonalny eksperyment z regulatorem P.
Ponadto, nie wiemy, czy regulator PID może być
zastosowany.
W jaki sposób zaprojektować dobry regulator?
Widać, że nie jest to takie proste. Trzeba
zrezygnować z metody ad-hoc i głębiej wniknąć w
teorię, zrozumieć działanie układów dynamicznych i
ich własności, poznać metody projektowania.
Symulacja rozwiązania
y′′′+2y′′=1.8K(5-y);
K=0.01

Sterowniki przemysłowe,
sterownik PLC
Uwagi

•
W zależności od natury obiektu i stopnia złożoności zadania sterowania logicznego lub
zadania regulacji automatycznej może ono być realizowane przez:
•
Stosunkowo proste specjalizowane układy elektromechaniczne lub elektroniczne (w tym
mikroprocesorowe) zintegrowane z obiektem sterowania (np. sterowanie bramą garażową,
kuchenką mikrofalową, pralką automatyczną, wtryskiem paliwa do silnika spalinowego w
samochodzie, itd.). Układy tego typu określa się jako układy wbudowane (embedded
systems).
•
Programowalne sterowniki logiczne (PLC – Programmable Logic Controllers),
wyodrębnione, specjalizowane urządzenia do realizacji zadań sterowania logicznego. Są one
produkowane z reguły jako całe rodziny urządzeń, od prostszych obsługujących jedynie
niewiele sygnałów binarnych (dla realizacji zadań sterowania logicznego – jak np. sterowanie
linią butelkowania) do bardziej złożonych obsługujących zarówno wiele sygnałów binarnych
jak i sygnały ciągłe (dla realizacji zadań sterowania binarnego i zadań regulacji).
•
Zadania programowalnych sterowników logicznych realizowane są również obecnie przez
typowe komputery PC (najczęściej w wykonaniu przemysłowym) wyposażone w
odpowiednie karty wejścia/wyjścia umożliwiające obsługę sygnałów pomiarowych (binarnych
i ciągłych) i wyprowadzanie sygnałów sterujących.
•
Regulatory i sterowniki przemysłowe – samodzielne urządzenia sterujące konstruowane
dla realizacji jednej pętli regulacji bądź kilku pętli regulacyjnych. Te ostatnie to z reguły
urządzenia wielofunkcyjne (multifunction controllers), umożliwiające równoczesną realizację
kilku pętli regulacyjnych i zadań sterowania binarnego (mają wejścia/wyjścia zarówno ciągłe
jak i binarne). Stąd regulatory wielofunkcyjne (sterowniki przemysłowe - PAC) upodabniają
się do sterowników PLC – z tą różnicą, że są konstruowane z reguły przede wszystkim dla
realizacji zadań regulacji, a PLC z reguły przede wszystkim do zadań sterowania binarnego.
•
Podobnie jak w przypadku PLC, zadania regulatorów realizowane są również obecnie przez
typowe komputery PC (w wykonaniu przemysłowym) wyposażone w odpowiednie karty
wejścia/wyjścia umożliwiające obsługę sygnałów pomiarowych i wyprowadzanie sygnałów
sterujących.
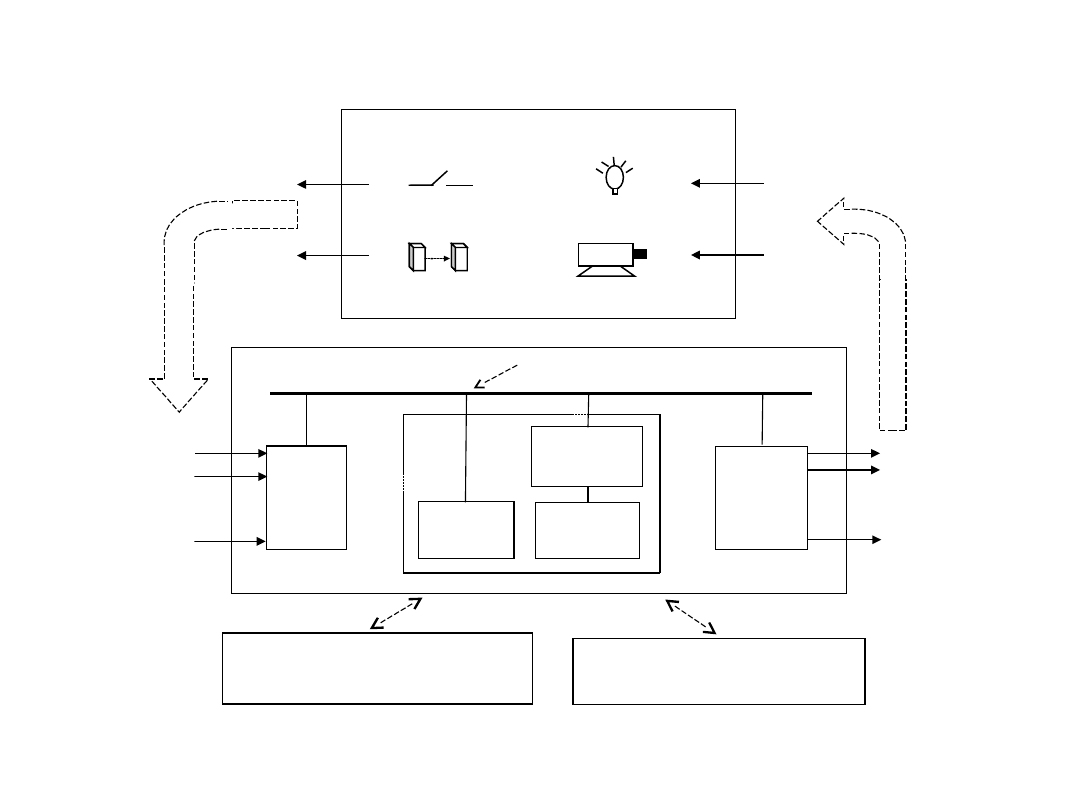
PLC
Procesor
główny
Pamięć
danych
Pamięć
programu
CPU
Moduł
wejść
Moduł
wyjść
I0.0
I0.1
I1.5
Q0.0
Q0.1
Q1.1
Obiekt sterowany
Przyciski
Czujniki optyczne
Oświetlenie
Napędy
silników
Programator
PC + STEP7, MicroWin
Stacja Operatora Procesu
PC+ProTool/Pro, WinCC
Magistrala
PLC
Cykl
PL C
2. W y konani e
programu
3. Uaktualnienie
wy jsc
1. O dczyt
wejsc
4. D iagno styka
i ko munikacja
Pętla programowa PLC
Ad. 2. – Program użytkownika
Sterownik obsługuje przerwania w dowolnej części cyklu
programu
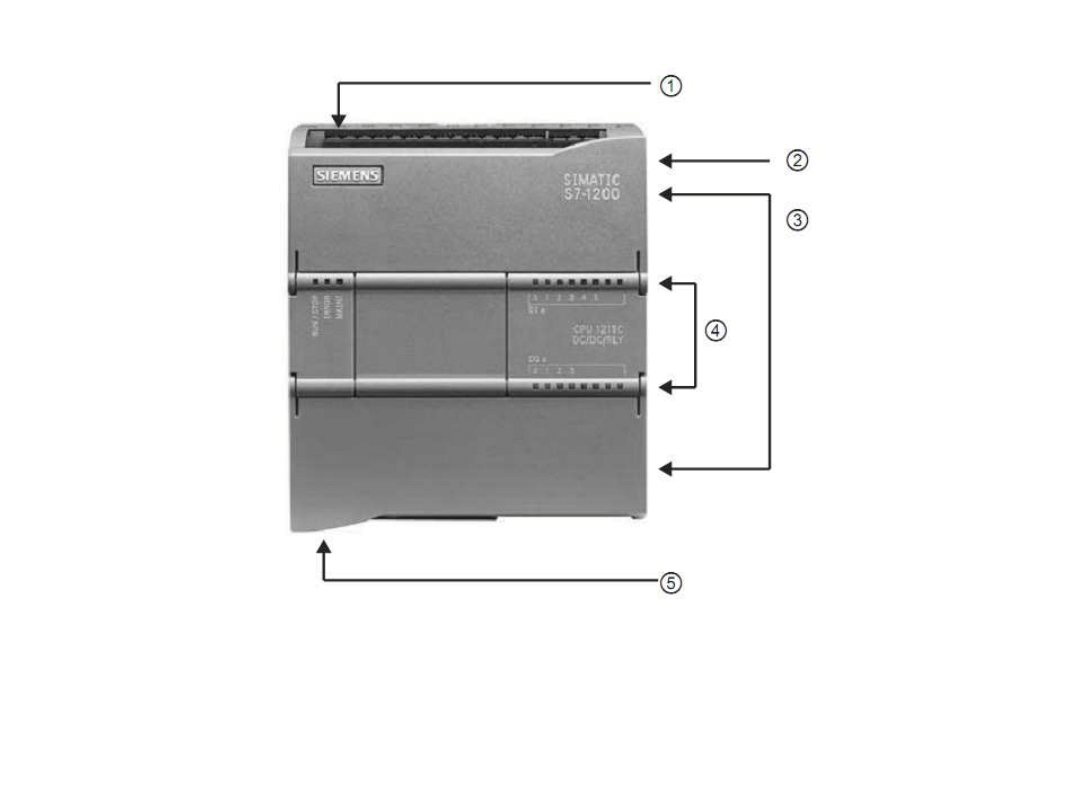
1-złącze zasilające, 2-gniazdo karty pamięci, 3-rozpinane złącza
na przewody pod
klapkami, 4-sygnalizacyjne diody LED dla zintegrowanych
We/Wy, 5-złącze PROFINET
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
Wyszukiwarka
Podobne podstrony:
Podstawy automatyki 08 02 2015 Nieznany
FESTO Podstawy automatyzacji
12 Podstawy automatyki Układy sterowania logicznego
podstawy automatyki ćwiczenia lista nr 4b
Lubelska Próba Przed Maturą Marzec 2015 GR B Poziom Rozszerzony
Podstawy automatyki cz1
Z2, Szkoła, Semestr 5, Podstawy Automatyki - laboratoria, Automaty lab, Automaty, Zestawy
automaty, PWr W9 Energetyka stopień inż, IV Semestr, Podstawy automatyki - laboratorium, Podsatwy au
Podstawy automatyki 2
podstawy automatyki
Podstawy automatyki (w 5) elementy wykonawcze i pomiarowe ppt [tryb zgodnosci]
podstawy automatyki ćwiczenia lista nr 4c
podstawy automatyki ćwiczenia lista nr 5b
Konspekt wykładów z Podstaw automatyki wykład 5
podstawy automatyki ćwiczenia lista nr 3c
podstawy automatyki ćwiczenia lista nr 4d
Podstawy automatyki
automatyka i robotyka-rozwiazania, Politechnika Wrocławska - Materiały, podstawy automatyki i roboty
więcej podobnych podstron