
Energoelektronika

Cel wykładu
Przedstawienie podstawowych pojęć,
metod i rozwiązań stosowanych
w energoelektronice

Program wykładu
• Klucze stosowane w energoelektronice
• Wzmacniacze mocy
• Prostowniki niesterowane
• Prostowniki sterowane
• Przetworniki DC - DC
• Falowniki
• Wybrane zagadnienia

Literatura
• Materiały prezentowane na wykładzie
• M. Nowak, R. Barlik, „Poradnik inżyniera
energoelektronika”, WNT, 1998
• S. Januszewski, A. Pylak, M. Rosnowska
– Nowaczyk, H. Świątek,
„Energoelektronika”, WSiP, 2004
• Witryny internetowe
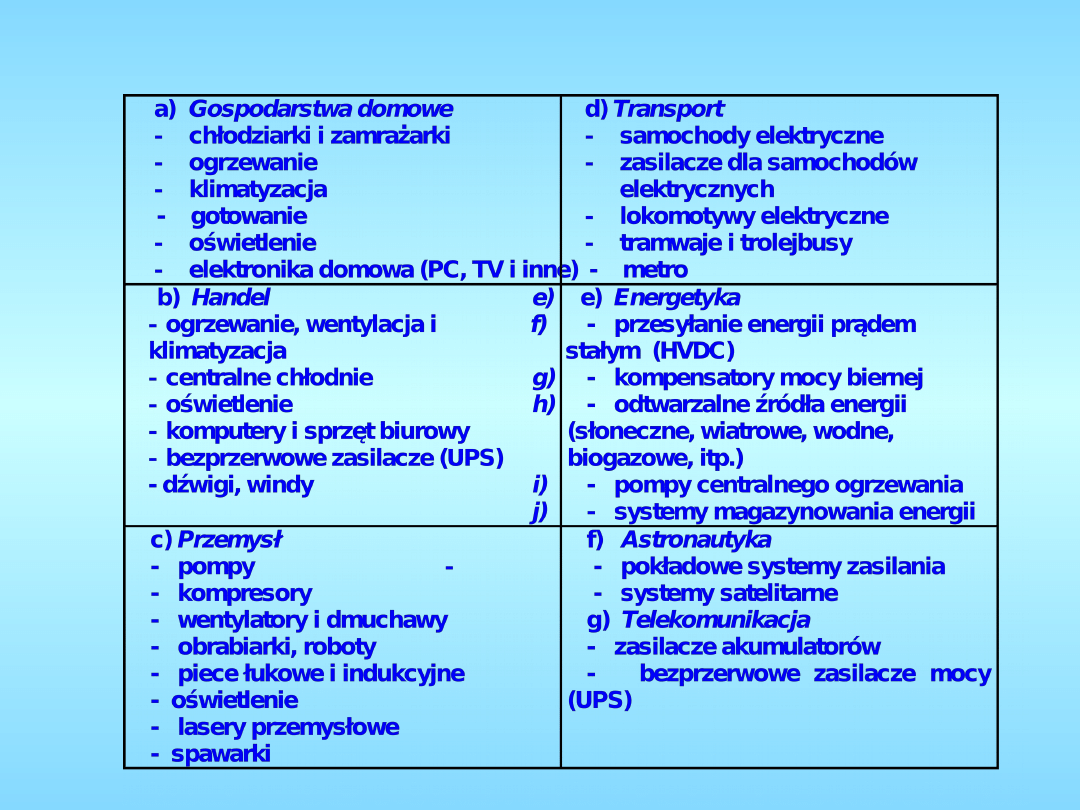
Obszary zastosowań energoelektroniki
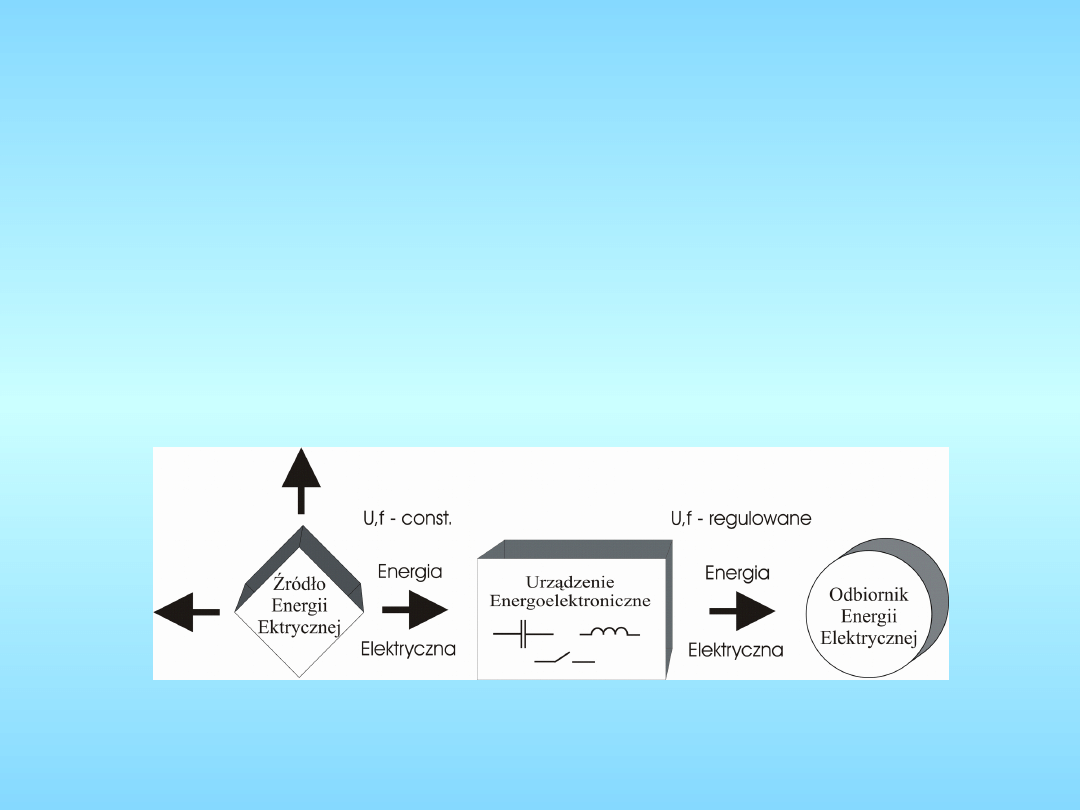
Rys. 1. Uproszczony schemat systemu wytwarzania, przesyłu i przetwarzania
energii elektrycznej
Na poniższym rysunku przedstawiono uproszczony schemat systemu
wytwarzania, przesyłu i przetwarzania energii elektrycznej. Jak widać, układ
energoelektroniczny jest członem pośredniczącym pomiędzy źródłem a
użytkownikiem energii elektrycznej. Jego wielkością wejściową jest energia
elektryczna o ściśle określonych parametrach (napięcie, częstotliwość), a
wielkością wyjściową również energia elektryczna ale o parametrach
regulowanych zgodnie z wymaganiami użytkownika.
To centralne usytuowanie urządzenia energoelektronicznego nakłada na nie
bardzo wysokie wymagania dotyczące sprawności i pewności działania.
Zarówno sprawność jak i niezawodność działania systemu wytwarzania i
przesyłu jest bardzo wysoka (bliska 100%). Dlatego też, to od przetwornika
energoelektronicznego zależy głównie jakość działania całego systemu.

SPRAWNOŚĆ UKŁADÓW ENERGOELEKTRONICZNYCH
Jednym
z
podstawowych
wymagań
stawianych
urządzeniom
energoelektronicznym jest wysoka sprawność przetwarzania energii. W
odróżnieniu od układów tzw. elektroniki liniowej , gdzie sprawność nie jest ich
podstawowym parametrem, układy energoelektroniczne muszą pracować ze
sprawnością rzędu 90 - 99%. Dlatego też zagadnienia minimalizacji strat w
każdym urządzeniu energoelektronicznym są podstawowym problemem, z
którym musi uporać się projektant. W początkowym okresie rozwoju
energoelektroniki półprzewodnikowej podstawowym układem stosowanym w
praktyce przemysłowej był prostownik z komutacją sieciową, gdzie przełączanie
elementów odbywało się z bardzo niską częstotliwością sieciową. W tym
układzie podstawowym źródłem strat były stany przewodzenia elementów,
którymi były tyrystory SCR. O sprawności układu prostownikowego decydowały
zatem jedynie parametry tyrystorów, głównie spadek napięcia w stanie
przewodzenia. Możliwości zmniejszania strat były zatem bardzo ograniczone.
Konstruowane w tym okresie czasu inne układy energoelektroniczne, takie jak
falowniki czy choppery wykorzystywały również jedyny dostępny na rynku
element nie w pełni sterowalny jakim był tyrystor SCR. Powodowało to, że ich
struktury były bardzo rozbudowane, ponieważ aby umożliwić wyłączenie
elementu, należało stosować często bardzo skomplikowane układy komutacji
zewnętrznej. Obniżało to znacznie sprawność układu energoelektronicznego.

W połowie lat siedemdziesiątych (1975) pojawił się na rynku pierwszy
użyteczny dla zastosowań w energoelektronice bipolarny tranzystor
mocy (Toshiba Giant Transistor –
Ic= 400 A ,Vce=300 V), który zapoczątkował epokę zastosowań
elementów w pełni sterowalnych . Obecnie dysponujemy już bardzo
szeroką gamą tych elementów, z których najważniejsze to: tranzystor
IGBT (Insulated Gate Bipolar Transistor), polowe tranzystory mocy
(Power MOSFET), tyrystory GTO (Gate Turn Off ) i inne.
Zastosowanie elementów w pełni sterowalnych spowodowało ogromny
postęp w zakresie konstrukcji układów falownikowych (DC/AC,
AC/DC/AC) i chopperowych (DC/DC). Możliwym stało się wykorzystanie
znanych z innych dziedzin technik modulacyjnych takich jak PWM (Pulse
Width Modulation) czy też PFM (Pulse Frequency Modulation), gdzie
elementy są przełączane z częstotliwościami od kilku kHz do kilku Mhz,
dzięki czemu przebiegi wyjściowe prądów bądź napięć są bardzo
zbliżone do przebiegów sinusoidalnych. Wiadomym jest, że wzrost
częstotliwości przełączeń musi spowodować wzrost strat w procesach
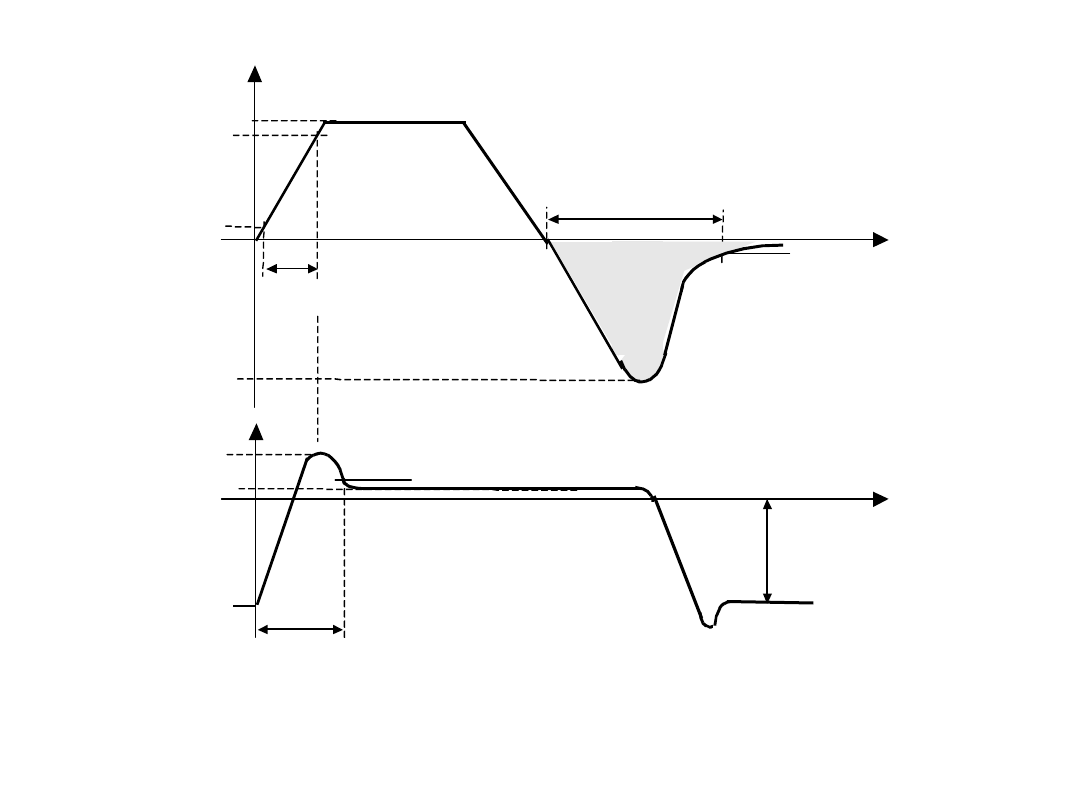
przełączania. W tradycyjnej, tzw. „twardej” metodzie przełączania (hard
switching) w stanach przejściowych np. podczas wyłącznia elementu
następuje jednocześnie zanikanie prądu i wzrost napięcia na elemencie
(rys.2).
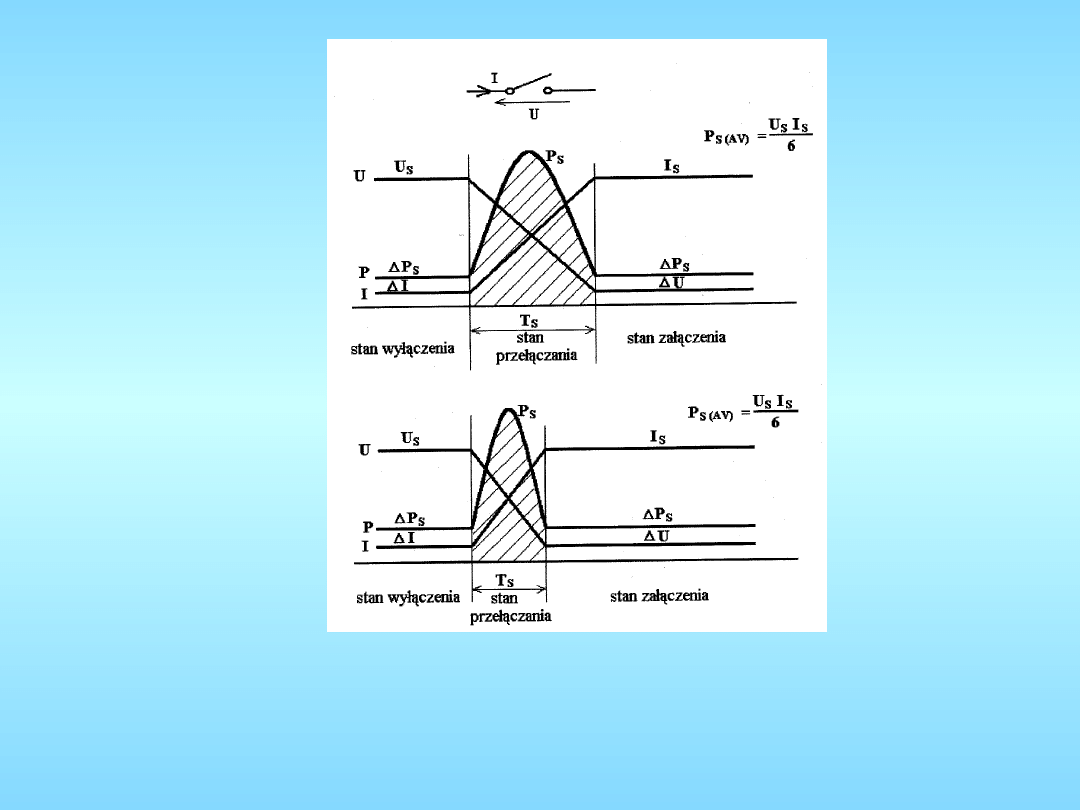
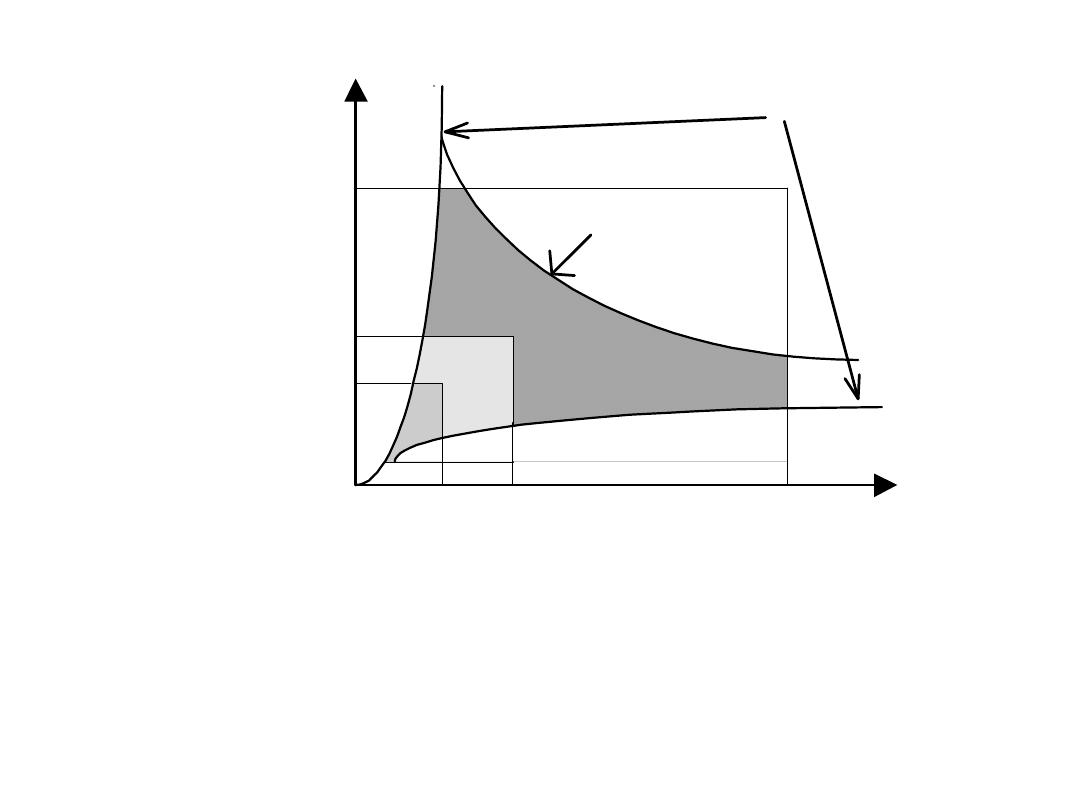
Rys.2. Przebiegi napięcia, prądu na elemencie oraz parabola strat mocy podczas
„twardego przełączania”

Przy załączaniu mamy sytuację odwrotną. W obydwu tych
przypadkach na elemencie występują znaczne straty mocy, które
opisywane są tzw. „parabolą strat mocy”. Jedynym sposobem
zmniejszenia strat energii rozumianych jako całka ze strat mocy jest
skracanie czasu trwania przełączeń. Wtedy parabola strat mocy
zawęża swoje ramiona (nie zmieniając wartości ekstremalnej) dzięki
czemu całka z mocy strat czyli energia strat jest mniejsza.
Możliwości skracania czasu przełączeń są jednak bardzo
ograniczone właściwościami topologicznymi układu i parametrami
dynamicznmi elementu.
W 1986 roku została po raz pierwszy zaproponowana nowa metoda
sterowania elementami energoelektronicznymi tzw. „miękkie
przełączanie” (soft switching) . Głównym założeniem tej metody jest
wymóg przełączania elementu przy zerowym prądzie (ZCS - Zero
Current Switching) lub przy zerowym napięciu (ZVS - Zero Voltage
Switching). Ponieważ wtedy jeden z czynników iloczynu
decydującego o stratach mocy jest bliski zeru, dlatego możliwe jest
znaczne ograniczenie komutacyjnych strat mocy. Przykładowy
przebieg napięcia i prądu w tranzystorze przy zastosowaniu tej
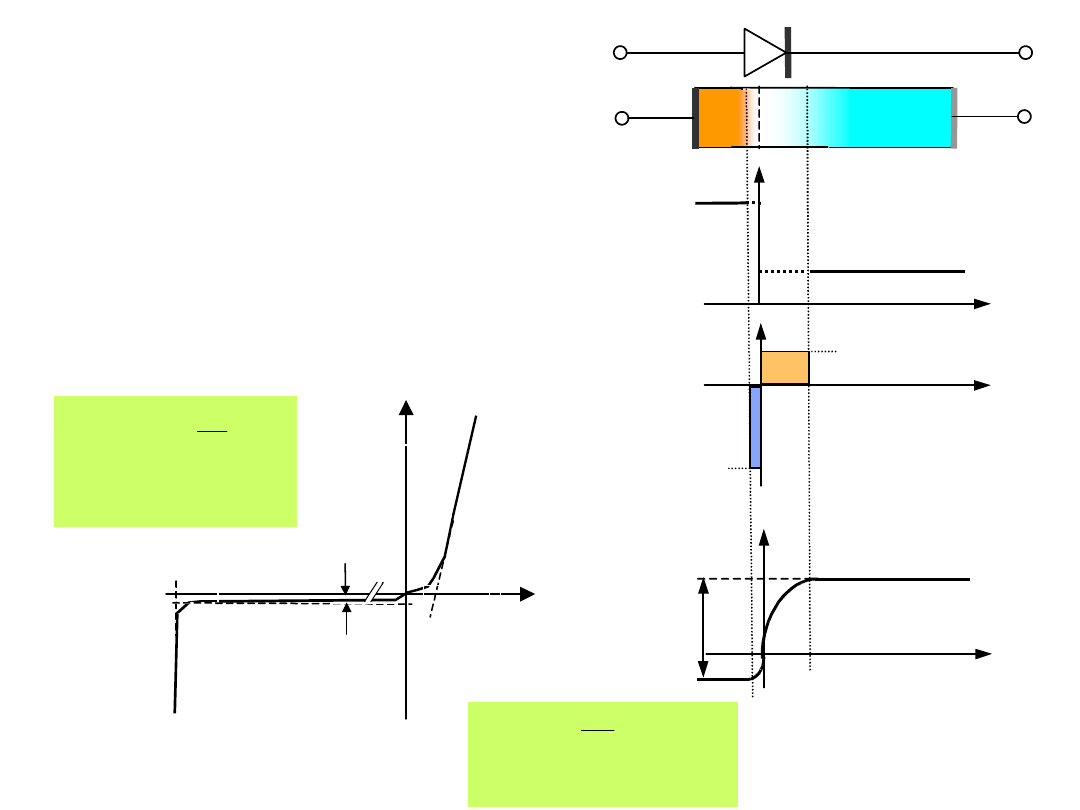
metody przedstawia rys.3.
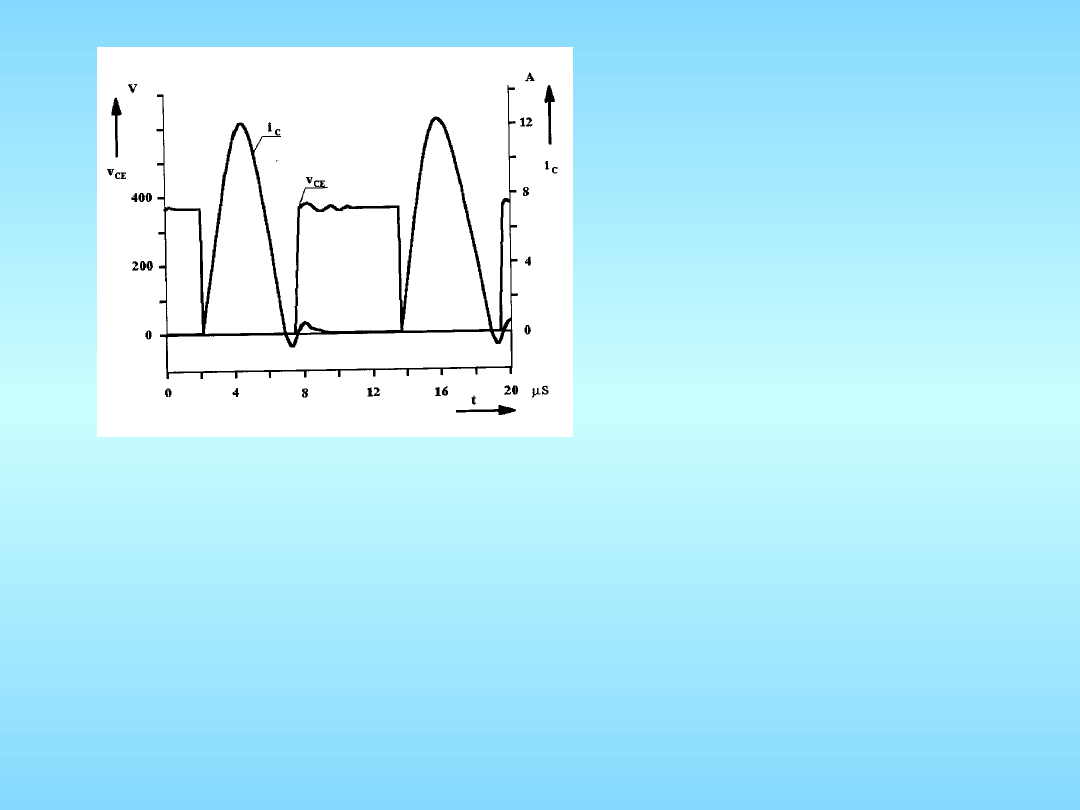
Rys.3. Przebiegi napięcia i prądu
w tranzystorze podczas
„miękkiego
przełączania”
Realizacja układowa tej metody wymaga zastosowania technik
rezonansowych lub quasi rezonansowych, będących przedmiotem
nowych rozwiązań.

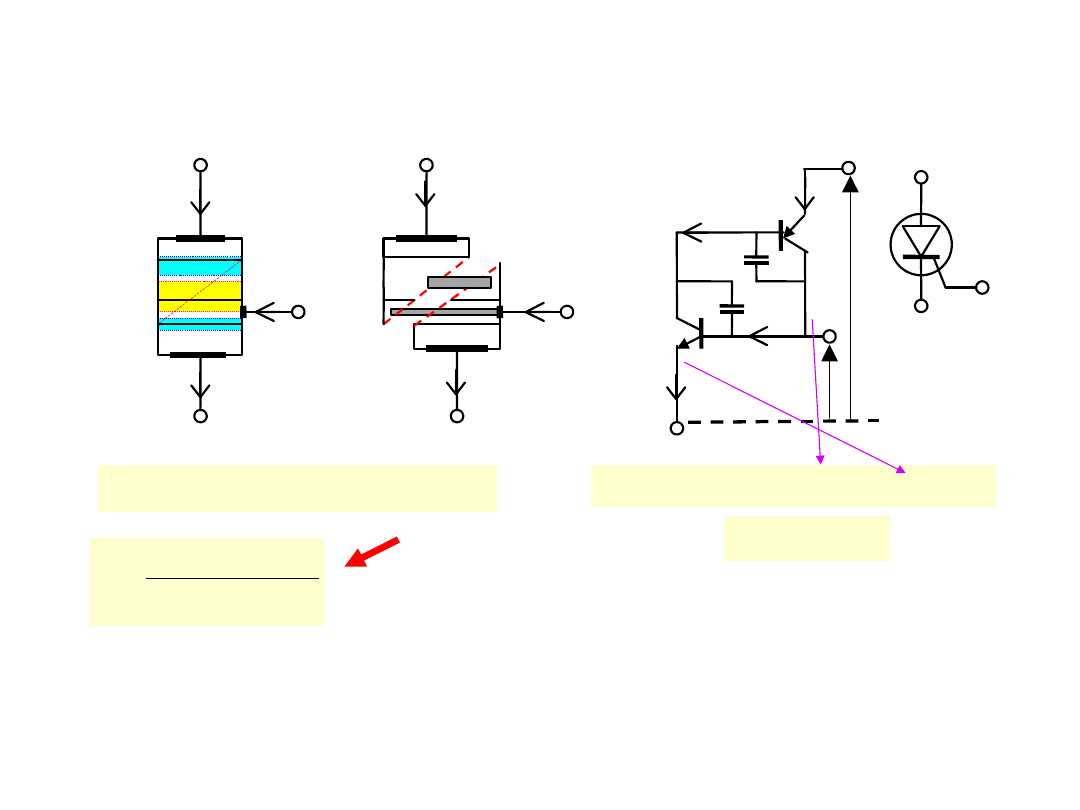
1. DIODY PÓŁPRZEWODNIKOWE
Dioda półprzewodnikowa jest dwuelektrodowym elementem
nieliniowym ze złączem prostującym p-n między obszarami
półprzewodnika o przewodnictwie typu n (donorowym) i przewodnictwie
typu p (akceptorowym) lub złączem prostującym metal-półprzewodnik
(złączem Schottky’ego).
Diody złączowe p
+
-n powstają w wyniku znacznego domieszkowana w
monolitycznym krysztale półprzewodnika obszaru o słabym
przewodnictwie donorowym jonami akceptorowymi o koncentracji N
A
,
przynajmniej o trzy rzędy większej niż koncentracja donorów (N
A
>>N
D
).
Na granicy tych dwóch obszarów tworzy się złącze skokowe p
+
-n o
optymalnych właściwościach prostujących.
Diody Schottky’ego powstają po naniesieniu na powierzchnię
półprzewodnika typu n odpowiedniej warstwy metalicznej; o pracy
wyjścia elektronu z tego metalu większej niż praca wyjścia z
półprzewodnika. Tutaj także powstaje warstwa ładunku przestrzennego
w obszarze przypowierzchniowym półprzewodnika na skutek
termoemisji elektronów z tego obszaru do metalu.
anoda katoda
a)
b)
c)
d)
p
+
n
N
A
N
D
x
0
x)
x
x
Q(x)
qN
D
-qN
A
i
D
u
D
U
BR
U
K
-I
0
Rys. 4. a) Przekrój przez jednorodne
skokowe złącze p
+
-n; a) rozkłady domieszek
po obu stronach złącza metalurgicznego; c)
rozkłady ładunków przestrzennych; d) zmiany
potencjału w obszarze warstwy zaporowej
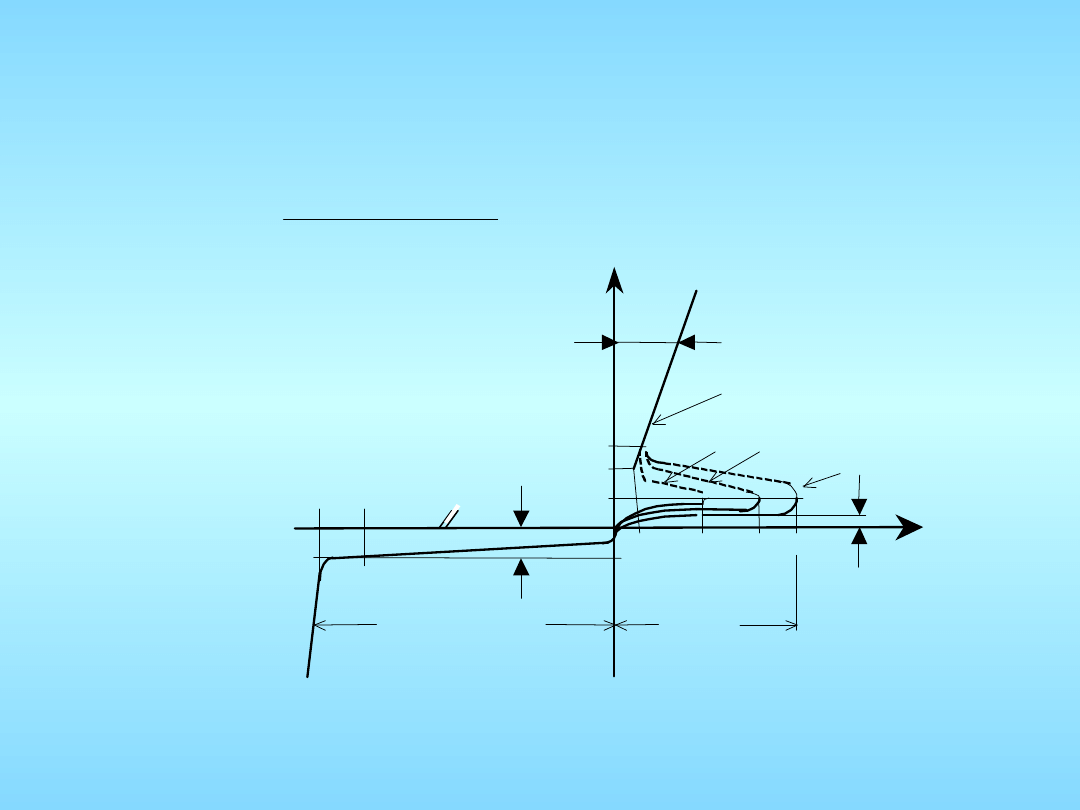
gdzie I
0
– prąd zerowy diody (przy u
D
<<0)
0
e
1
D
T
u
U
D
i
I
.
0
0
e
1
D
T
u
U
R
i
I
I
i
D
i
D
u
D
u
D
t
t
U
M
I
FSM
-I
0
dla f=50 Hz
dla f=kilkadziesiąt kHz
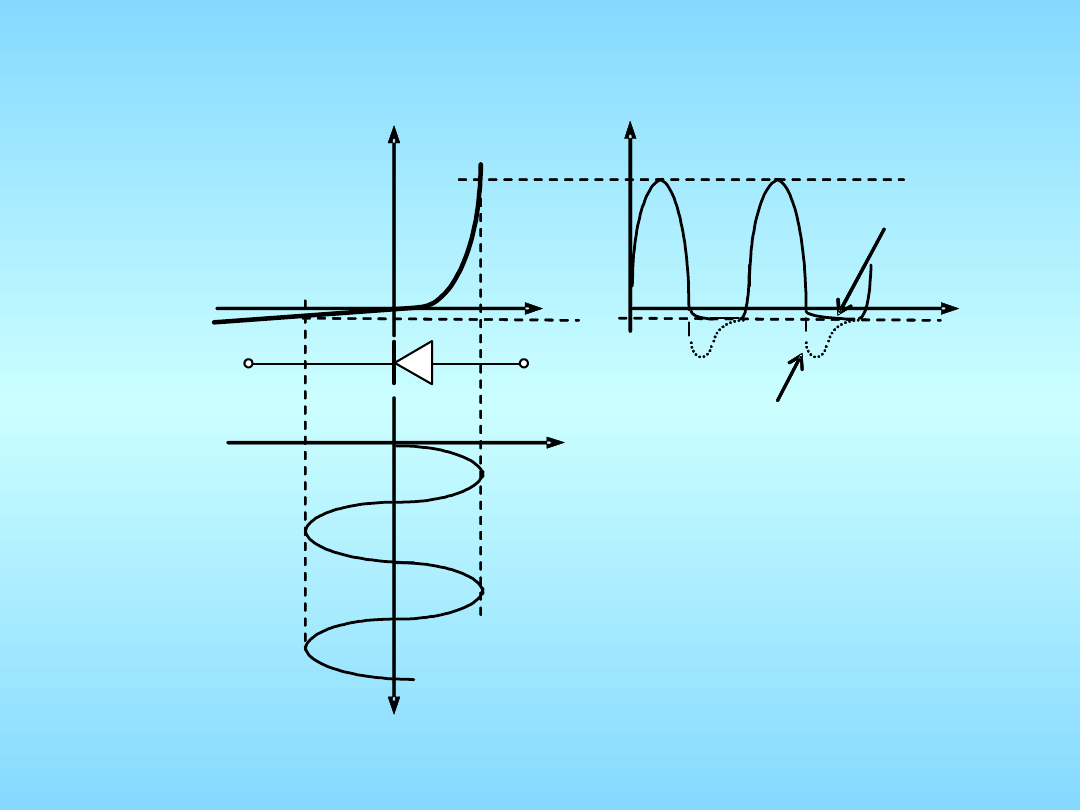
Rys.5. Praca diody prostowniczej
(U
m
i I
FSM
– maksymalne wartości
napięcia i prądu diody)
Tabela 1.1. Typowe parametry elektryczne diod
prostowniczych typu 1N4000 (BYP-400)
Typ
U
RR
M
[V]
U
BR
[V]
przy I
R
=10
A
min– typ.-
max
I
F
[A
]
U
F
[mV]
przy I
F
[A]
min – typ.-max
I
R
[A]
przy U
R
[V]
min – typ.-max
t
rr
[s
]
C
j
[pF]
(U
R
=1
0V
f= 1
MHz)
1N40
01
200
200 – 350
1
99 - 1110
1
00 5 –
0,1
30
0
30
6 - 8
1N40
04
400
400 - 480
1
980 - 1100
1
0,02 -10
40
0
30
6,2 -
9,0
1N40
05
600
1
1100
1
10 -
60
0
30
1N40
06
800
1
1100
1
10 -
80
0
30
1N40
07
100
0
1
1200
1
10
10
00
30
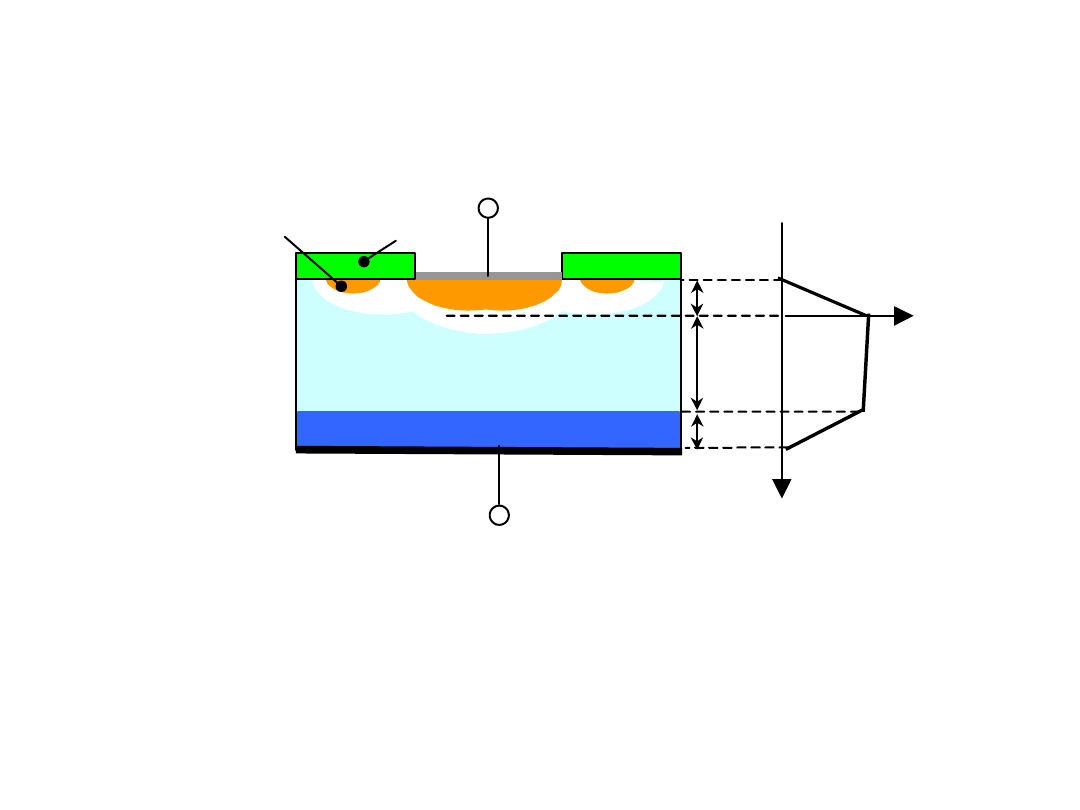
Pierścień Anoda
ochronny SiO
2
E
max
E
Katoda x
10 m
250 m
p
+
p
+
p
+
n
-
n
+
d
RD
Diody dużej
mocy
Przekrój struktury diody krzemowej dużej mocy i
rozkład pola elektrycznego (napięcia anodowego) przy
polaryzacji zaporowej
Typowe parametry krzemowych diod
mocy
Typ diody
Max.
napię
cia
Max.
prądu
Napięcie
przewod
zenia
Szybkoś
ć
przełącz
enia
Zastosowania
Prostownicze
wysokonapięci
owe
30 kV
0,5
A
10 V
10 ns
Układy WN
Ogólnego
zastosowania
5
kV
10
kA
0,7 2,5
V
25 s
Prostowniki5
0 Hz
Przełączające
3
kV
2
kA
0,7 1,5
V
< 5 s
Układy
komutacyjne
Diody
Schottky’ego
mocy
100 V
300
A
0,2 0,9
V
30 ns
Prostowniki
AF i RF
Diody Zenera
mocy
300 V
( 75
W)
Układy
stabilizacyjne
i referencyjne
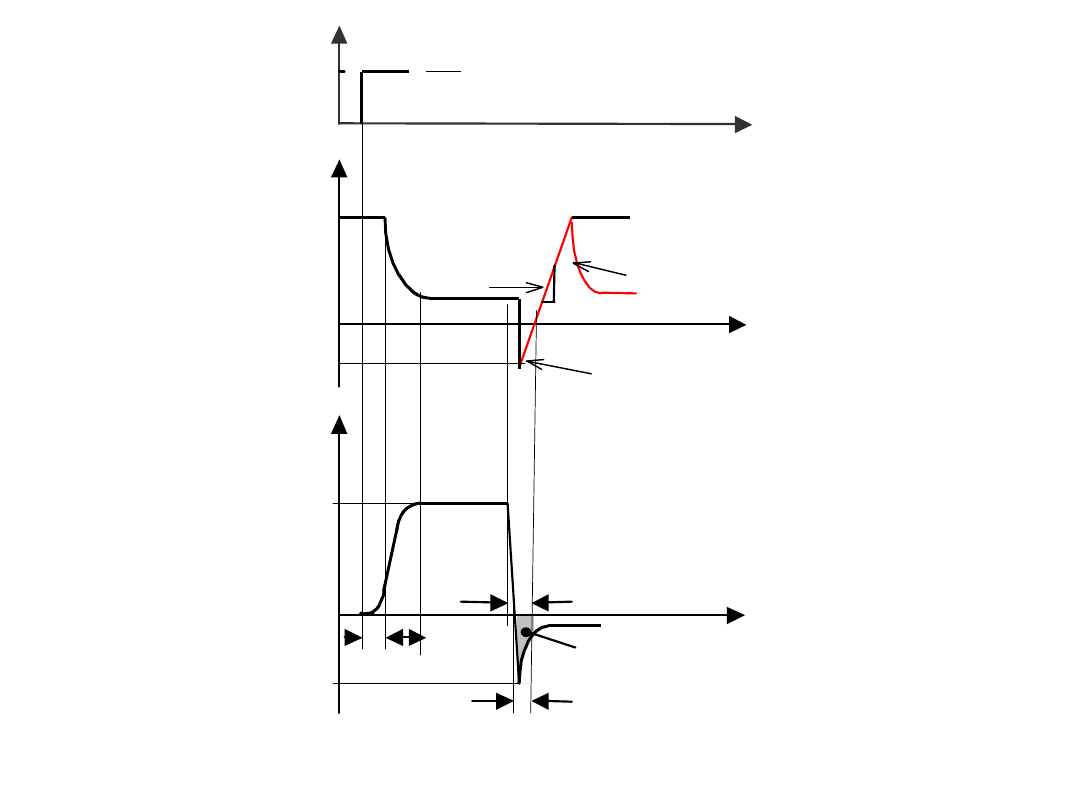
i
D
I
F
0,9I
F
t
rr
0,1I
F
t
r
0,25I
rr
t
I
rr
u
D
U
rf
U
ON
U
R
t
ON
załączenie diody przełączenie diody
1,1U
ON
t
Q
rr
Przebiegi czasowe prądu oraz napięcia diody mocy podczas
załączania i przełączania
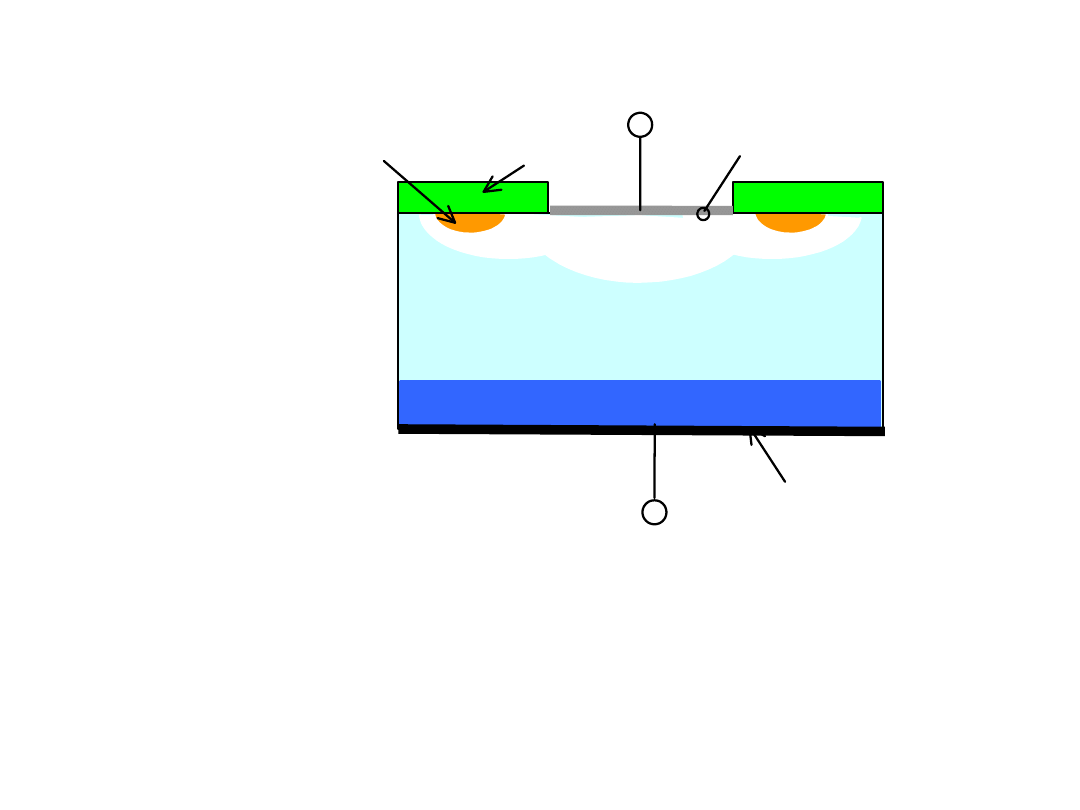
Pierścień Anoda
ochronny SiO
2
złącze prostownicze
Złącze omowe
Katoda
p
+
p
+
n
-
n
+
warstwa
zubożona
Struktura złączowa diody Schottky’ego
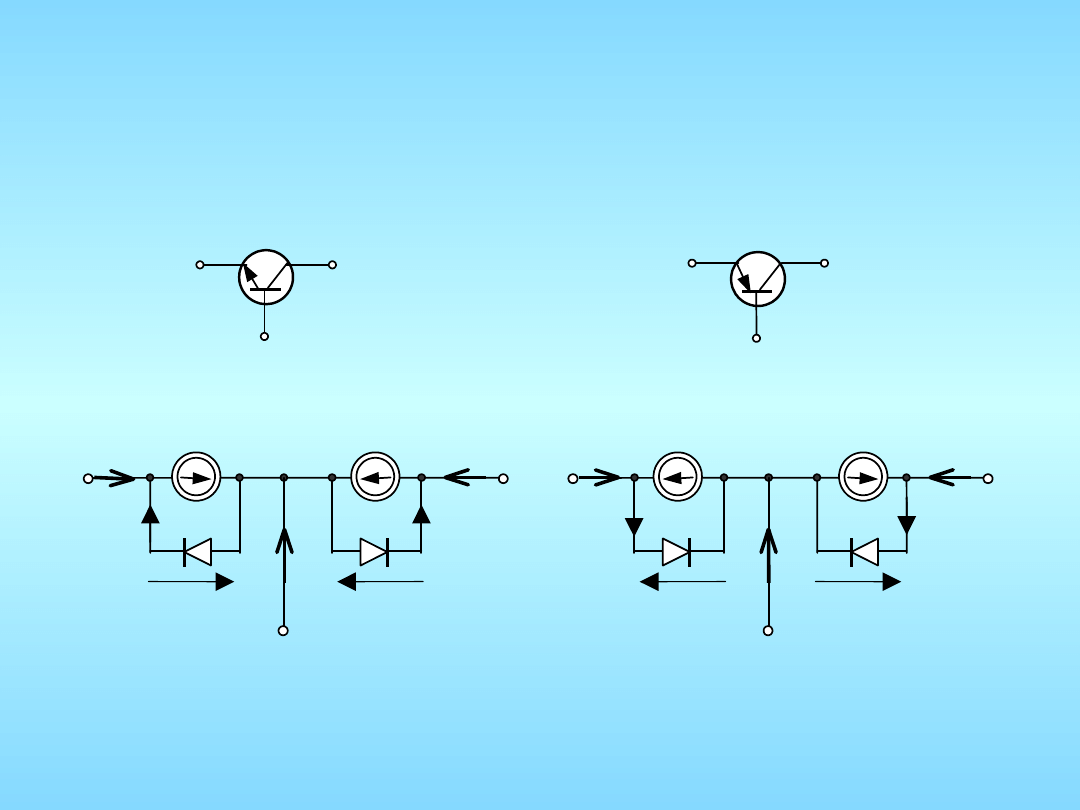
Bipolarne tranzystory mocy
E C E C
a) b)
B B
a
R
i
R
a
F
i
F
a
R
i
R
a
F
i
F
E
i
E
i
C
C E i
E
i
C
C
i
F
i
R
i
F
i
R
i
B
i
B
u
BE
u
BC
u
BE
u
BC
B B
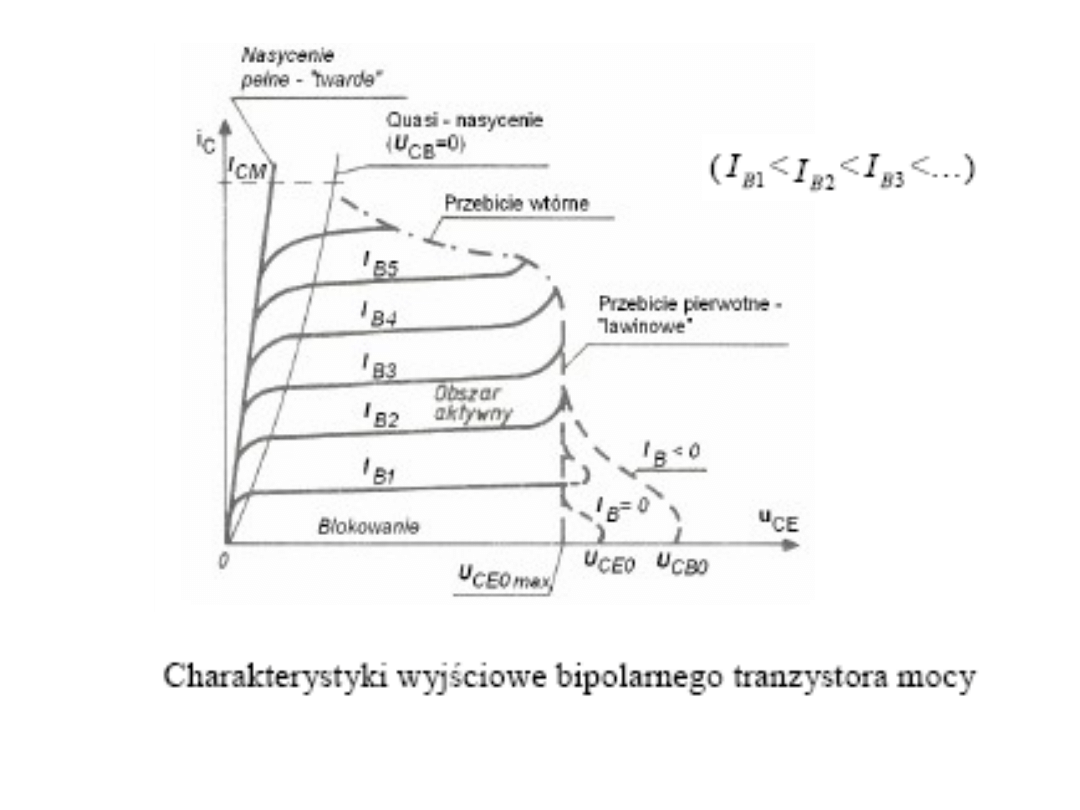

Bipolarne tranzystory mocy różnią się
nieco od tranzystorów normalnych
wewnętrzną strukturą złączową, i jej
powierzchnią, głównie w obszarze
kolektora. Muszą one bowiem
wytrzymywać napięcia rewersyjne
U
CBmax
>200 V. Złącze baza-kolektor jest
w zasadzie diodą p-i-n z pogrubioną
warstwą bazy – aby uniknąć jej
przebicia skrośnego przy tak dużych
napięciach. W efekcie, tranzystory mają
dużo mniejszy współczynnik β
F
=2550
oraz szerszy obszar nasycenia; na
charakterystykach wyjściowych jest to
tzw. kwazinasycenie
U
CE(sat)
= 1,2 4 V.
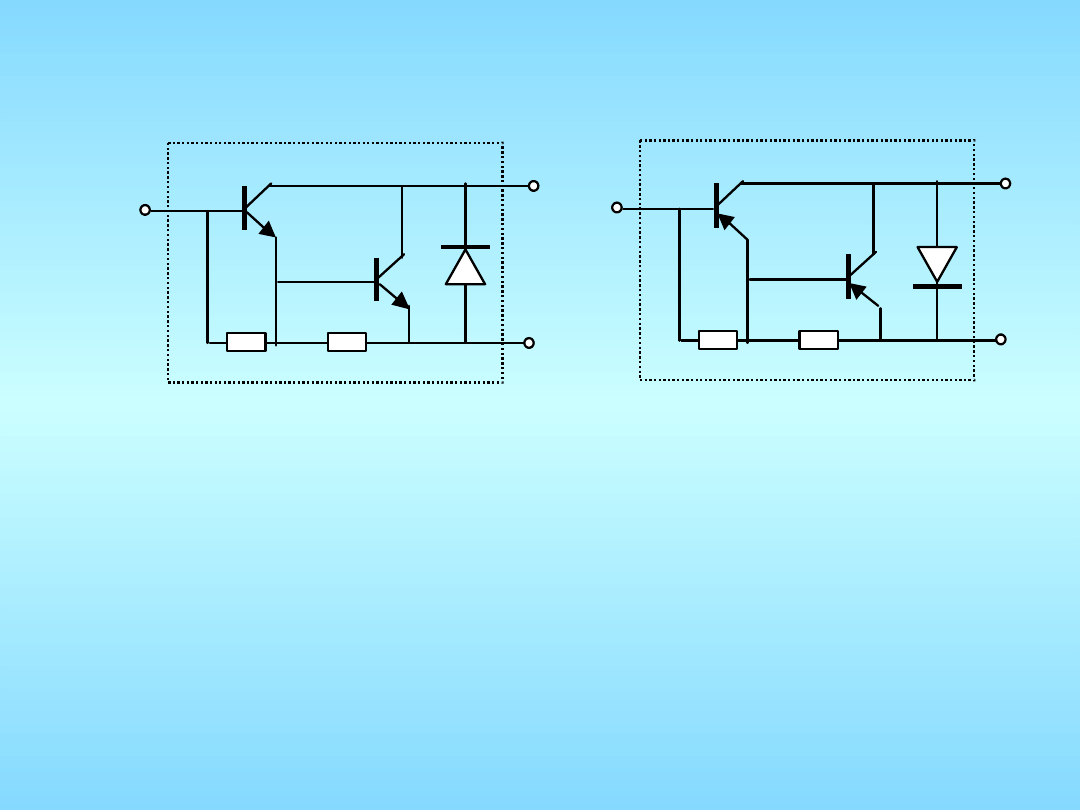
C C
B B
10k 150 10k 150
E E
n-p-n p-n-p
Budowa wewnętrzna tranzystorów
Darlingtona
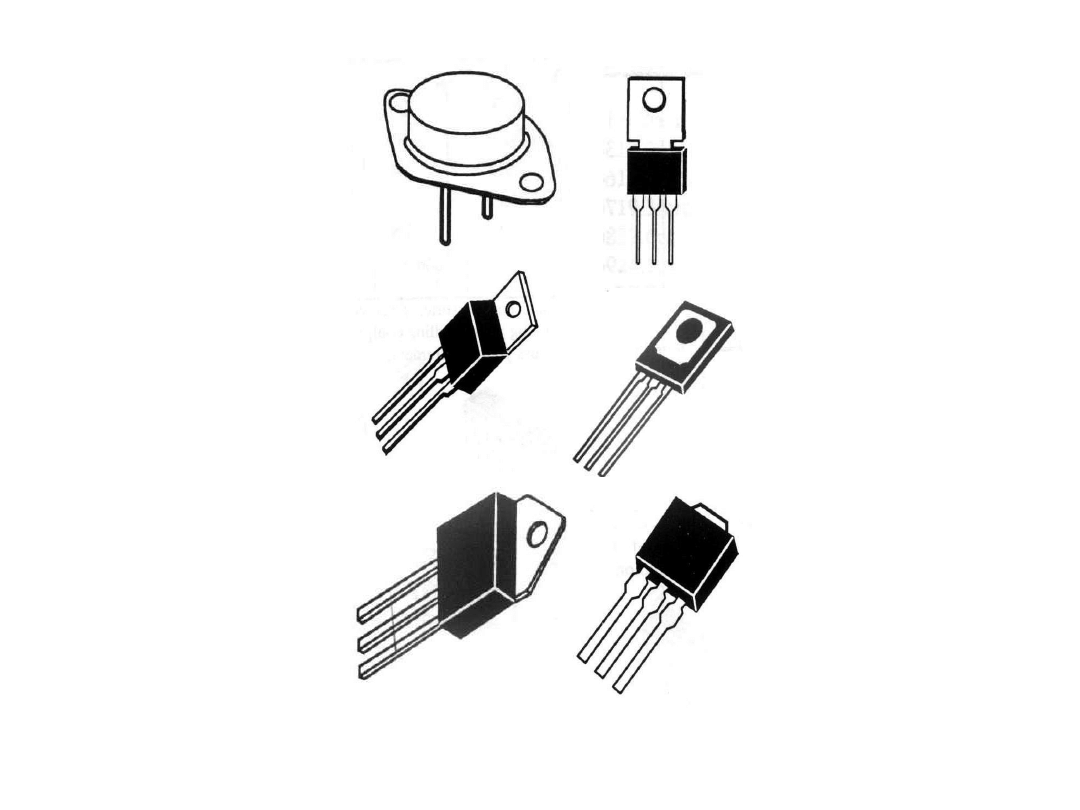
TO-251
TO-202
TO-126
TO-218AC
TO-3
TO-220
Typy obudów tranzystorów
mocy
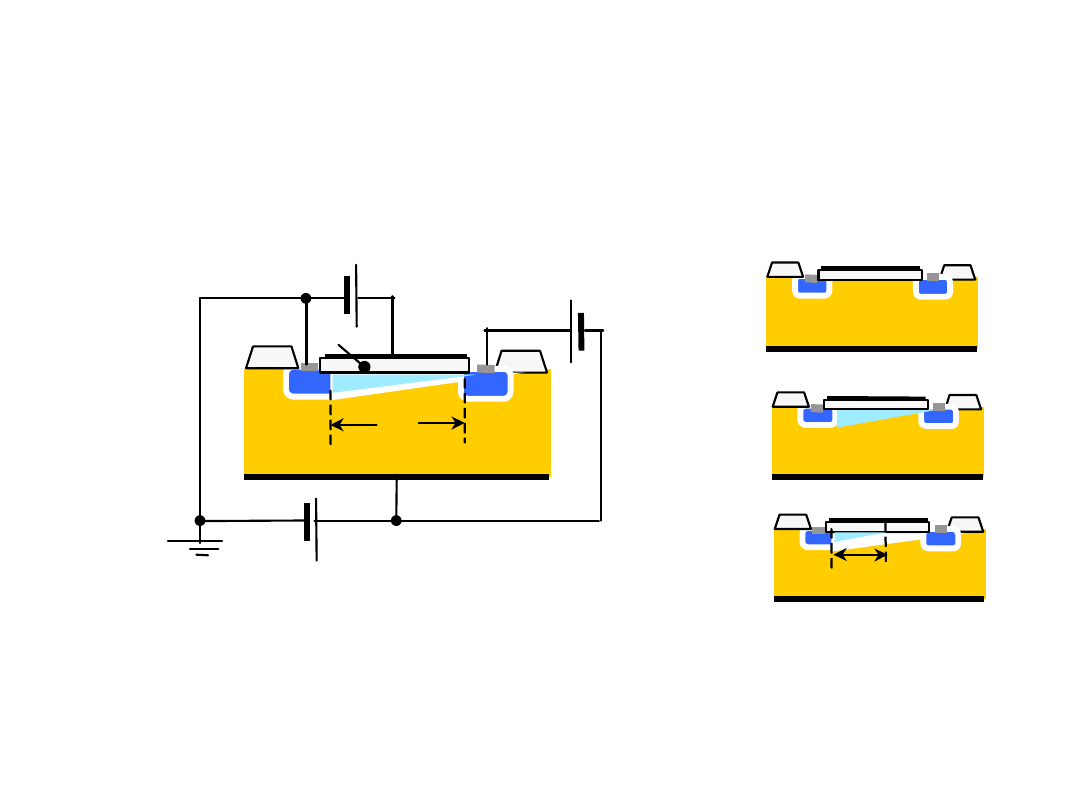
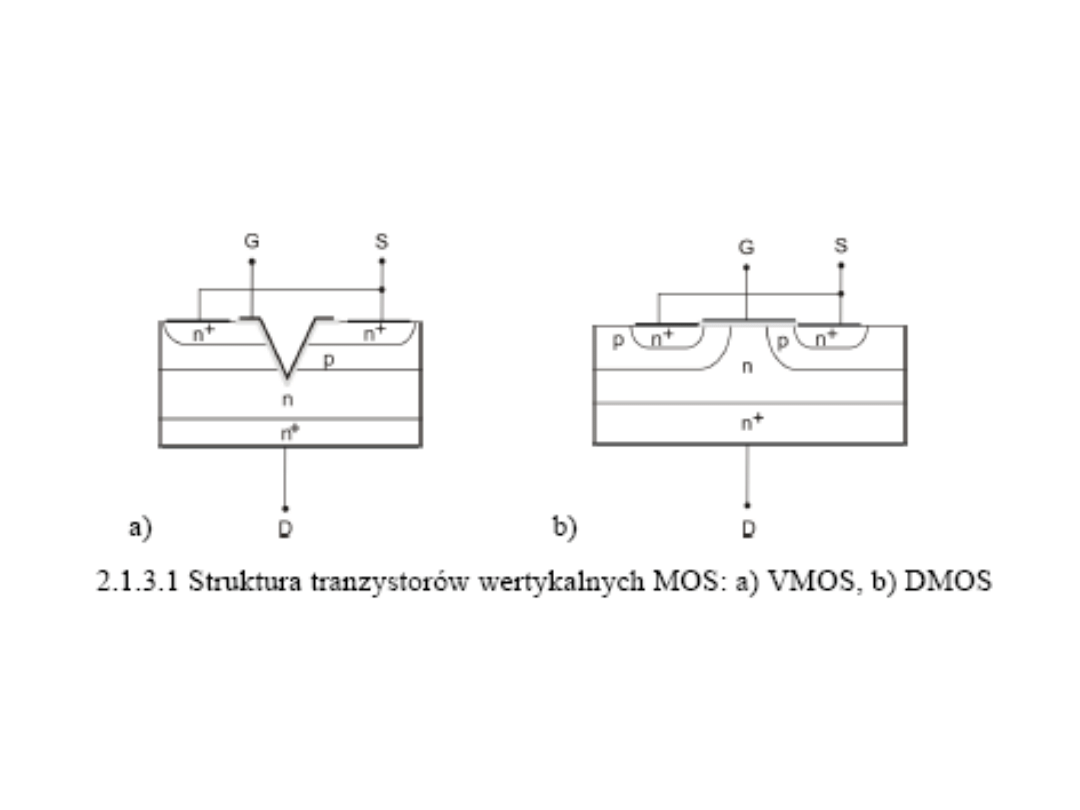
TRANZYSTORY UNIPOLARNE
n
+
n
+
a) Stan odcięcia: U
GS
<V
T
b)
U
GS
Dren U
DS
Źródło SiO
2
bramka
Stan załączenia: U
GS
>V
T
zakres:
p L - liniowy c)
U
GS
-U
DS
>V
T
podłoże
-nasycenia
U
BS
U
GS
–U
DS
<V
T
d)
L’
a) Przekrój i sposób polaryzacji tranzystora
n-MOSFET normalnie odciętego: b) w stanie odcięcia i stanie
załączenia:
c) w zakresie liniowym, d) w zakresie nasycenia
TRANZYSTORY UNIPOLARNE
MOCY
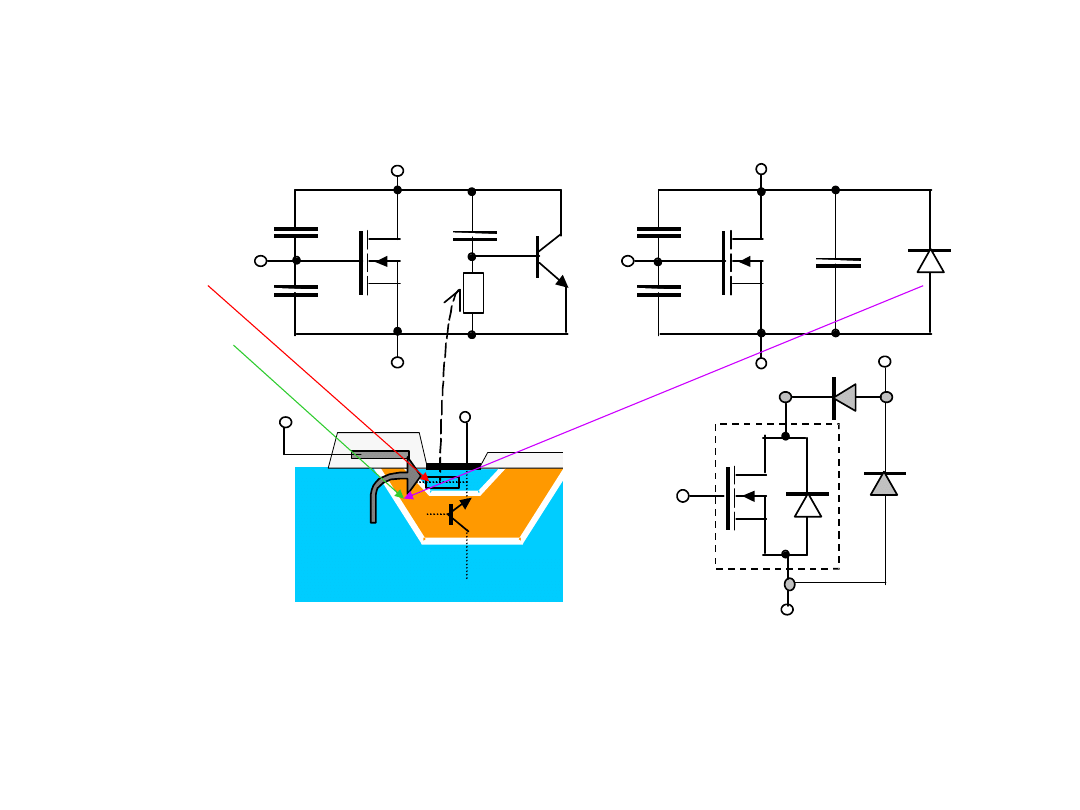
TRANZYSTORY
UNIPOLARNE
D D
a) c)
C
gd
C
ds.
C
gd
G G
r
be
C
ds
C
gs
C
gs
S
G S
b) d)
i
D
p
n
+
a) Schemat zastępczy tranzystora mocy n-MOSFET z pasożytniczym
tranzystorem bipolarnym: b) o rezystancji r
be
lub c) diodą , oraz sposób
usprawnienia d) – z dwiema diodami zewnętrznymi
Przewodzący kanał
wprowadza małą
rezystancję
r
be
co w konsekwencji
daje diodę p-n do źródla.
I
D
V
DSS
r
DS
typowe (max)
U
GS
(dla I
D
)
V
T
1A
900V
7 (9)
10V (0.5A) 1.5 - 3.5V
2A
500V
3 (4)
10V (1A)
2 - 4V
9A
200V
0.25 (0.4)
10V (5A)
2 - 4V
13A
500V
0.3 (0.4)
10V (7A)
2 - 4V
45A
60V
0.024 (0.03)
10V (25A)
2 - 4V
Typowe parametry stałoprądowe
pojedynczych
tranzystorów n-MOSFET
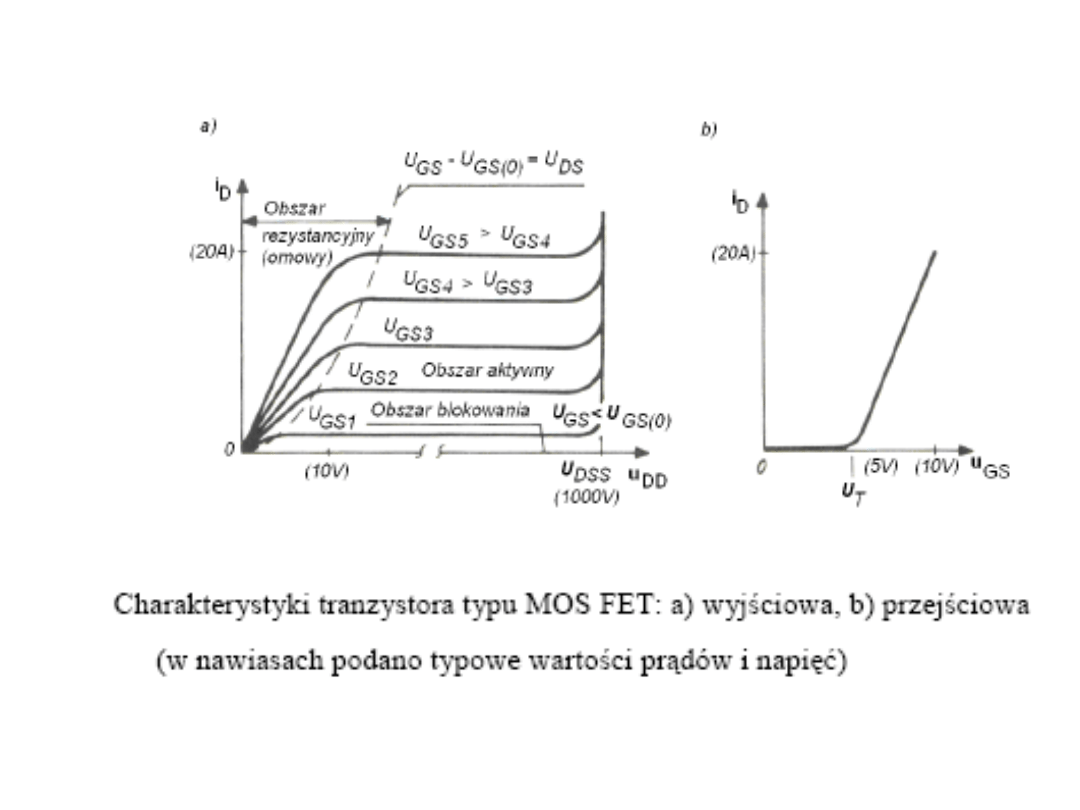
i
D
I
D(ON)
I
D(OFF)
U
DS.(ON)
u
DS
U
GS
=10 V
=9 V
= 8 V
= 7 V
=6 V
= 5 V
=4 V
Typowe charakterystyki
wyjściowe tranzystora mocy
n-MOSFET
u
A
u
A
anoda
i
A
i
A
i
A
i
B1
T1
J 1 p
E
T1(p-n-p)
C
j1
n
B
bramka
J 2
p
B
u
G
u
G
C
j2
katoda
J 3 n
E
T2
u
AK
d)
T2(n-p-n)
i
K
i
K
i
K
u
GK
a) u
K
b)
u
K
c)
i
B2
i
G
i
G
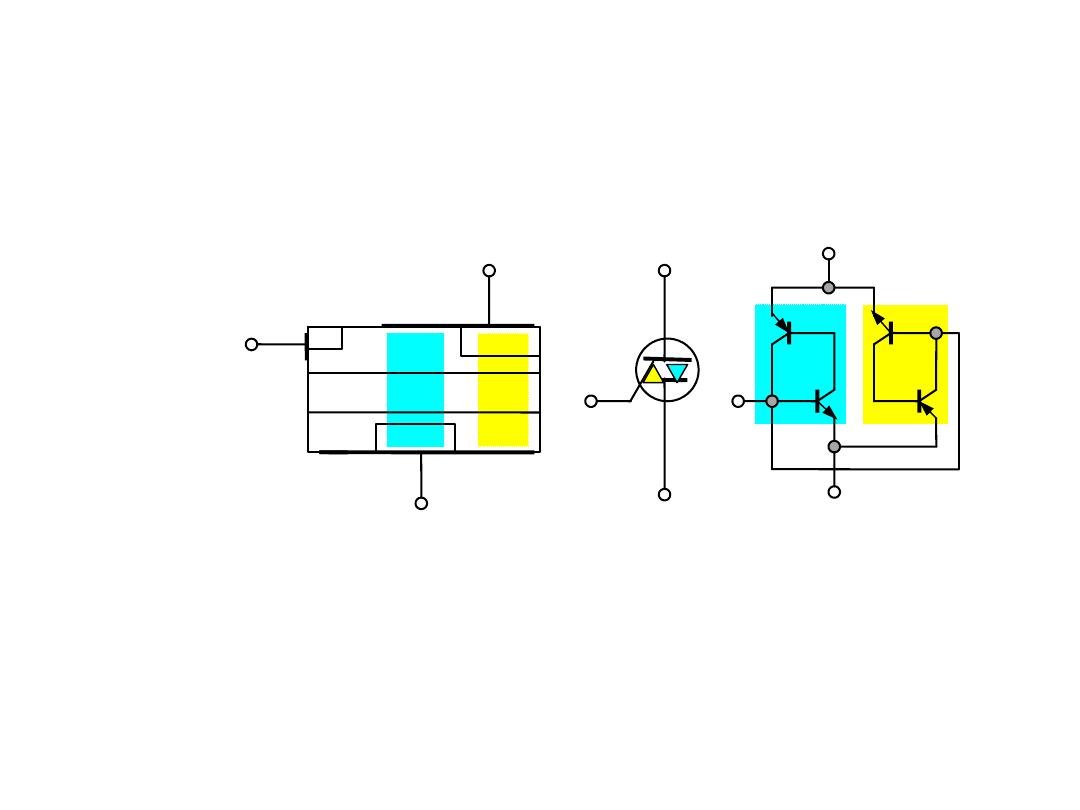
TYRYSTOR
a) Struktura złączowa tyrystora; b) modelowe rozdzielenie na dwie struktury
tranzystorowe;
c) tranzystorowy schemat zastępczy ; d) symbol graficzny tyrystora
gdzie I
CO
– prąd nasycenia tyrystora
1
1
1
CO
A
N
N
I
i
A
E
N
E
N
C
C
C
i
i
i
I
i
i
2
2
1
1
0
2
1
A
A
N
A
N
C
C
C
i
i
i
I
i
i
2
1
0
2
1
A
E
E
i
i
i
2
1
Przy napięciu U
B0
w obszarze złącza J2 następuje powielanie lawinowe
nośników
określone współczynnikiem M oraz gwałtowny przyrost prądu anodowego
i
A
I
T(AV)
U
TA
stan przewodzenia
I
L
I
G2
>I
G1
>0
I
H
I
G
=0
U
RSM
U
RRM
I
IN
I
CO
U
H
U
B2
U
B1
U
B0
u
AK
I
RRM
stan zaworowy stan
blokowania
1
1
1
N
N
M
1
1
1
CO
A
N
N
MI
i
M
Charakterystyka napięciowo-prądowa
tyrystora
Skrajne charakterystyki
u
FG
przewodzenia
U
FGM
Maks. dopuszczalne
straty mocy
w bramce
P
GM
U
GT
3
4
U
GD
1 2
0
I
GD
I
GT
I
FGM
i
FG
Charakterystyki bramkowe tyrystora z obszarami rozrzutu technologicznego
parametrów załączenia:
1 - obszar nieprzełączania,
2 - obszar możliwych przełączeń,
3 - obszar pewnych przełączeń
4 - obszar szkodliwych przełączeń
i
FG
(t)
I
FG
a)
t
u
AK
(t)
U
S
stromość
<100V/s
: narastania: przypadkowe
b)
du
AK
/dt włączenie przy
>100V/s
t
-U
C
moment
wyłączenia tyrystora
i
A
(t)
I
A
c)
t
OFF
t
t
d
t
ON
ładunek Q
rr
I
R
t
rr
-I
R
t
rr
a). Załączanie tyrystora prądem bramki: b) - zmiany
napięcia na tyrystorze, c) – odpowiedź prądowa
MT
2
(anoda2 - obudowa)
MT
2
MT
2
Bramka
n
3
p
2
n
4
G
n
2
G G
n
1
p
1
MT
1
(anoda 1) MT
1
MT
1
a) b) c)
TRIAK
Struktura złączowa; b) symbol graficzny; c) model tranzystorowy
triaka
Triak ma strukturę dwóch tyrystorów połączonych
przeciwlegle,
wykonanych w monokrystalicznym krzemie, i sterowanych
jedną bramką
I
MT
I
H0
I
H1
I
G2
> I
G1
I
G0
=0
I
H2
-U
BR(G0)
-U
BR(G2)
U
MT
-I
H2
U
BR(G2)
U
BR(G0)
-I
H1
I
G0
=0 I
G1
< I
G2
-I
H0
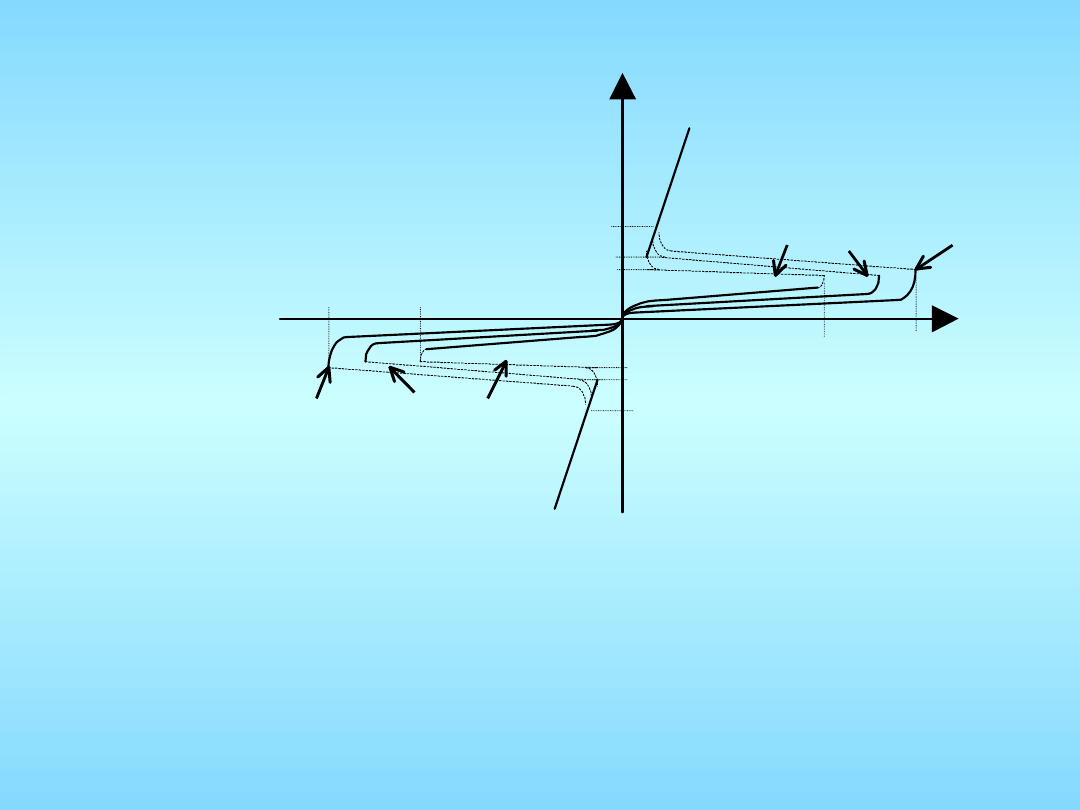
Charakterystyki napięciowo-prądowe triaka
Symetryczne są również charakterystyki napięciowo-prądowe
triaka
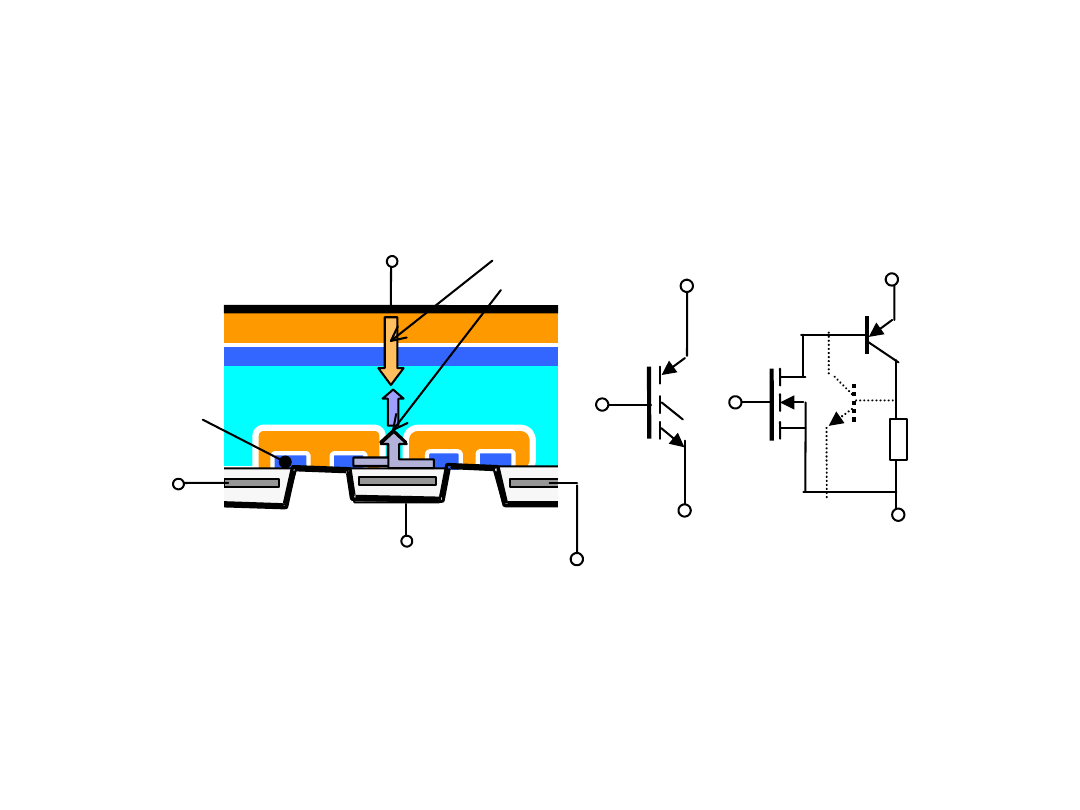
Tranzystory bipolarne
z izolowaną bramką (IGBT)
D (C)
a) b) C c) C
P
+
n
-
G G
G
E E
S (E) G
n
+
p
+
n
+
Strumienie:
- dziur
- elektronów
a). Struktura złączowa; b) symbol graficzny: idealny (-) i bardziej
właściwy (...):
c) model zastępczy tranzystora bipolarnego z izolowaną bramką
(IGBT)
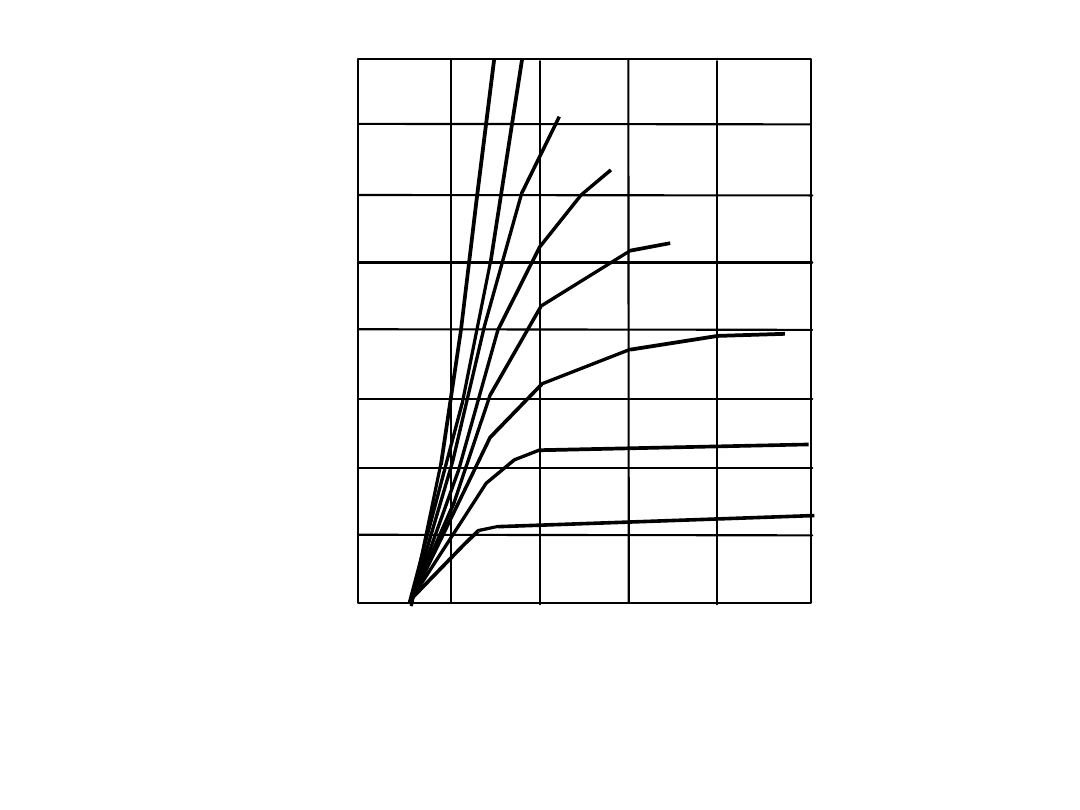
i
C
[A]
12 V
10V
9V
8 V
7 V
6 V
0 2 4 6 8 u
CE
[V]
U
CE
=20 V 15V
120
140
100
80
60
40
20
Charakterystyki wyjściowe tranzystora IGBT
wchodzącego w nasycenie przy 6 V i 100 A
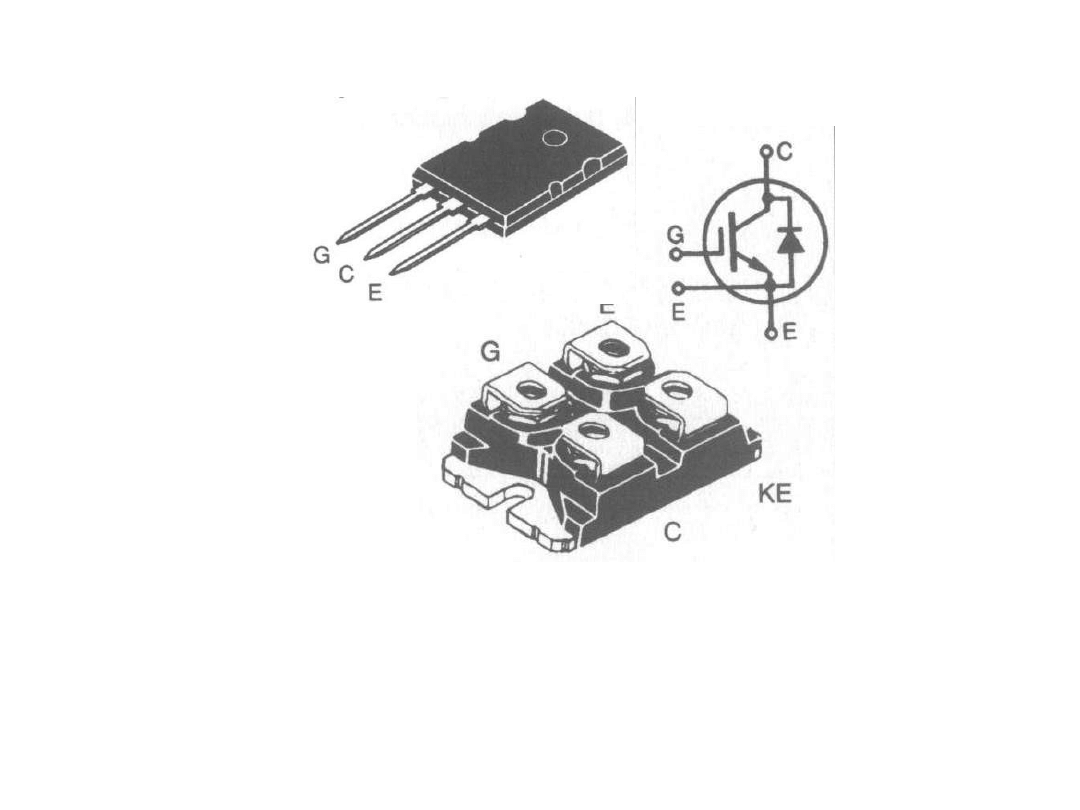
TO-264 AA
SOT-227 B
(miniBLOC)
IGBT w obudowie TO-264 AA i na bloku miedzianym
SOT-227 B
(KE – emiter cieplny (Kelvina), równoległy z E od góry

Tranzystory IGBT dzielą się na trzy grupy:
- seria S; z zabezpieczeniem przed krótko-trwałym (do 10
ms) zwarciem obwodu wyjściowego,
- seria G; pracujące przy niskich częstotliwościach od 50 Hz
do 80 kHz
- superszybkie; z wbudowaną diodą i małym ładunkiem Q
rr
.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
Wyszukiwarka
Podobne podstrony:
Podstawy elektroniki i energoelektroniki prezentacja ppt
Czym zajmuje sie ekonomia podstawowe problemy ekonomiczne
Podstawowe problemy akredytacji polskich laboratoriów wzorcujących J Olędziński
Podstawowe problemy ekonomiczne, Ekonomia, ekonomia
Podstawowe problemy bancassurance w Polsce
Podstawowe problemy i aspekty ped reso(1)
16908 podstawowe problemy filozoficzne
Psychologia rozwoju człowieka, Ściąga - psychologia, TEMAT 1: Przedmiot, podstawowe problemy i zaga
2 podstawowe problemy wyboru ekonomicznego 7PKIJK2VJNXR3ZUS4EST6IJLIP2JXQVB2R5HPIQ
PODSTAWOWE PROBLEMY ZDROWOTNE SPOŁECZEŃSTWA POLSKIEGO NA POCZĄTKU XXIw
1 PODSTAWOWE PROBLEMY EKONOMII 1(1)id 8626 ppt
PODSTAWOWE PROBLEMY ZDROWOTNE SPOŁECZEŃSTWA POLSKIEGO NA POCZĄTKU XXI
zagadnienia + opracowanie, Uniwersytet Wrocławski, podstawowe problemy badań rynkowych
więcej podobnych podstron