
Ćwiczenie VI. Podstawy algebry macierzy, cz. I
Strona internetowa ćwiczeń:
http://www.home.umk.pl/~henroz/matm1112
Dodatkowe materiały dydaktyczne:
1.
Ulrich W., 2009: Matrix algebra for students of biotechnology (for
students of the first year of master studies). Copyright © 2009 W.
Ulrich. http://www.home.umk.pl/~ulrichw/Matrix/Matrix1.pptx (11
października 2011).
2.
Ulrich W., 2007, 2008: Skrypt do matematyki, cz II (wektory i macierze) i
cz III (łańcuchy Markowa). Copyright © 2007-2008 W. Ulrich.
http://www.home.umk.pl/~ulrichw/MathStat/MathII.pdf
http://www.home.umk.pl/~ulrichw/MathStat/MathIII.pdf (11
października 2011).
3. Miszczyńska D., 2011a: Podstawy algebry liniowej (Matematyka –
materiały dydaktyczne). Copyright © 2011 D. Miszczyńska i Wyższa
Szkoła Ekonomiczno-Humanistyczna w Skierniewicach (Wydz.
Zarządzania).
http://wsehsk.home.pl/files/zarzadzanie/materialy/Podstawy_algebry_lini
owej.pdf (11 października 2011).
4. Miszczyńska D., 2011b: Wyznaczniki (Matematyka – materiały
dydaktyczne). Copyright © 2011 D. Miszczyńska i Wyższa Szkoła
Ekonomiczno-Humanistyczna w Skierniewicach (Wydz. Zarządzania).
http://wsehsk.home.pl/files/zarzadzanie/materialy/Wyznaczniki.pdf (11
października 2011).
5. Volpi L. & Foxes Team, 2007: Matrix Functions and Linear Algebra for Excel
(freeware). Copyright © 2007 L. Volpi.
http://digilander.libero.it/foxes/SoftwareDownload.htm (11 października
2011).
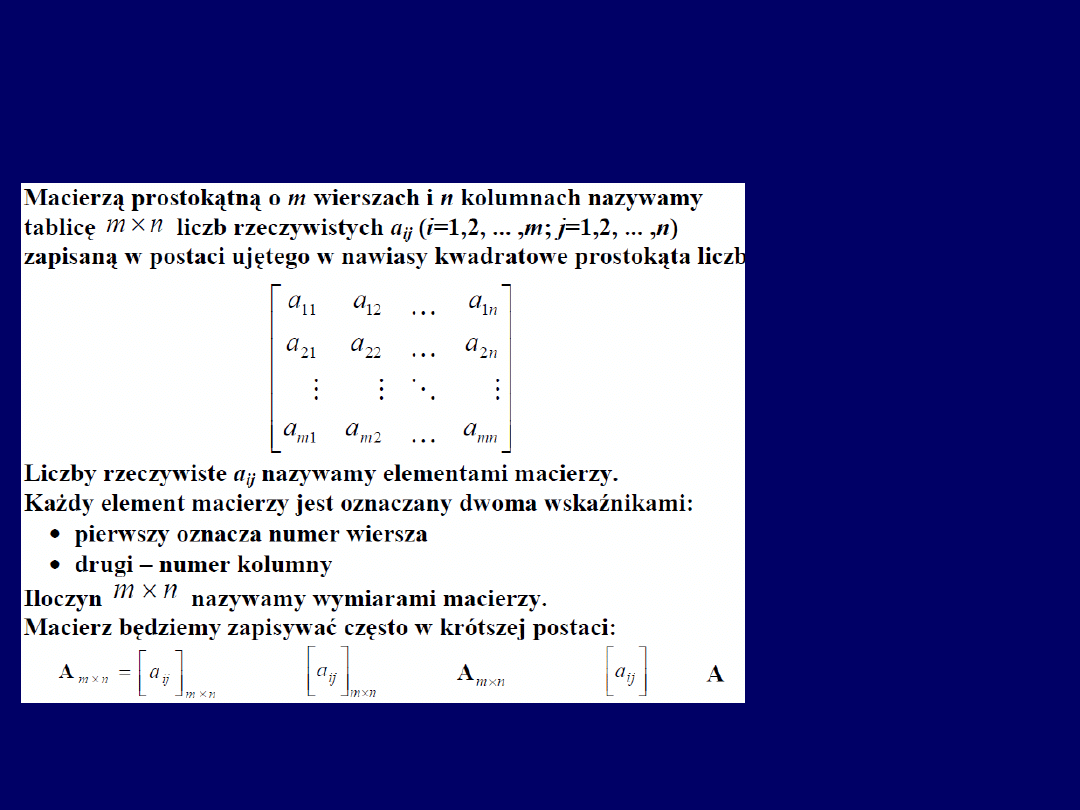
Biologiczne bazy danych
bardzo często mają charakter macierzy
. Np.
występowanie różnych organizmów żywych w różnych miejscach
(stanowiskach)
można zapisać w formie tabeli
, w której
gatunki będą
wierszami
, a
stanowiska – kolumnami
. Z matematycznego punktu
widzenia jest to
macierz prostokątna
, której zapis i definicja są
następujące:
Macierze, w których
m = n, nazywamy
kwadratowymi
,
gdzie
n – to stopień
macierzy
. Ponadto
mogą jeszcze być
macierze
diagonal-
ne
,
jednostkowe
(ang. „unity matrix”;
odpowiednik „1”
wśród liczb, ozn.
„I”),
zerowe
,
symetryczne
,
ortogonalne
,
górnotrójkątne
i
dolnotrójkątne
.
Źródło – poz. 3 z dodatkowych materiałów dydaktycznych
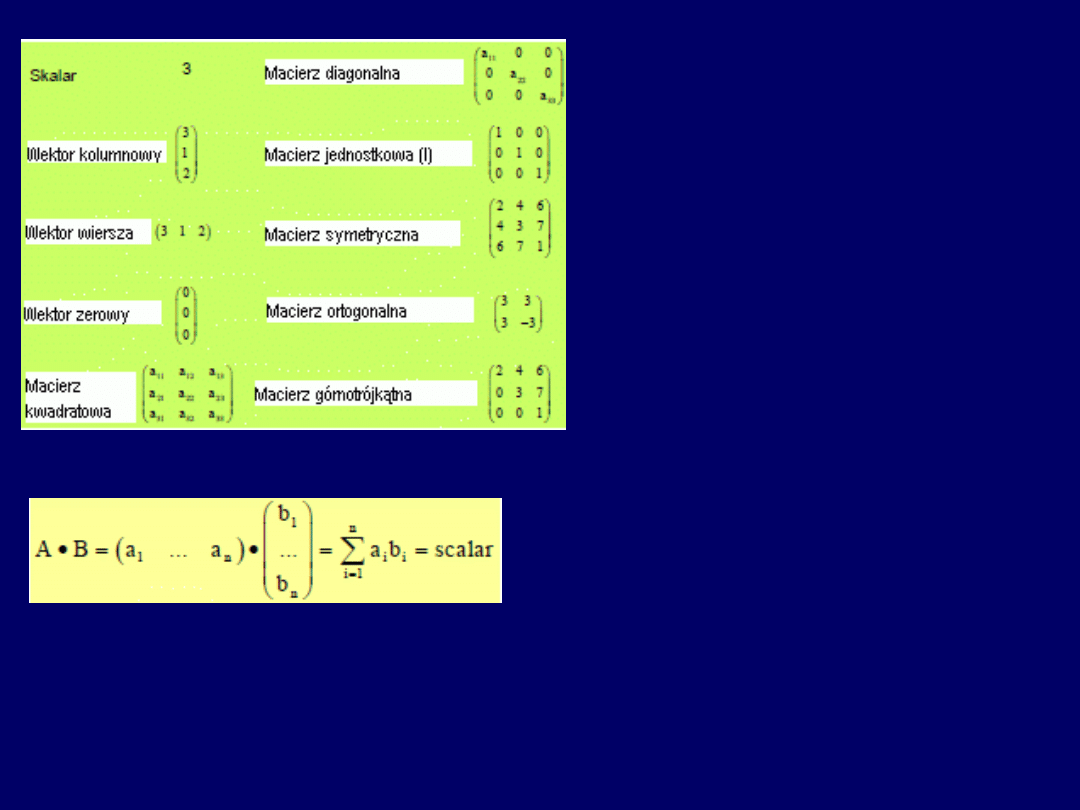
Przegląd podstawowych elementów macierzy i ich typów:
Liczby
, które np. mogą być
elementami macierzy, z mate-
matycznego punktu widzenia są
skalarami
,zaś
wiersze i kolumny
-
wektorami
. Znajomość alge-
bry macierzy, wymaga
podsta-
wowej znajomości algebry
wektorów
i praw/twierdzeń
związanych z nimi. Wektory
można
dodawać
,
odejmować
do/od siebie. Można je także
mnożyć
lub
dzielić
(mnożenie
przez odwrotność)
przez skalar
.
Możliwy jest także
iloczyn skalarny wektorów
, zgodnie z równaniem:
Tego typu iloczyn jest
zerowy
wtedy, gdy jeden z wektorów
jest zerowej długości lub wtedy,
gdy
mnożone wektory są prostopa-
dłe
, czyli ortogonalne. Istnieje
również inny typ iloczynu wektorów – tzw.
iloczyn wektorowy
, którego
wynikiem jest
inny wektor
– pod warunkiem, że wektory znajdują się nie
na płaszczyźnie, ale
w przestrzeni, co najmniej trójwymiarowej
. Mnożenie
wektorów jest
łączne
i
rozdzielne
.
Iloczyn
skalarny
jest
przemienny
, ale
wektorowy – nie
.
Dzielenie przez
wektor, nie jest możliwe
(brak jednoznacznego wyniku – nieskończenie
wiele rozwiązań).
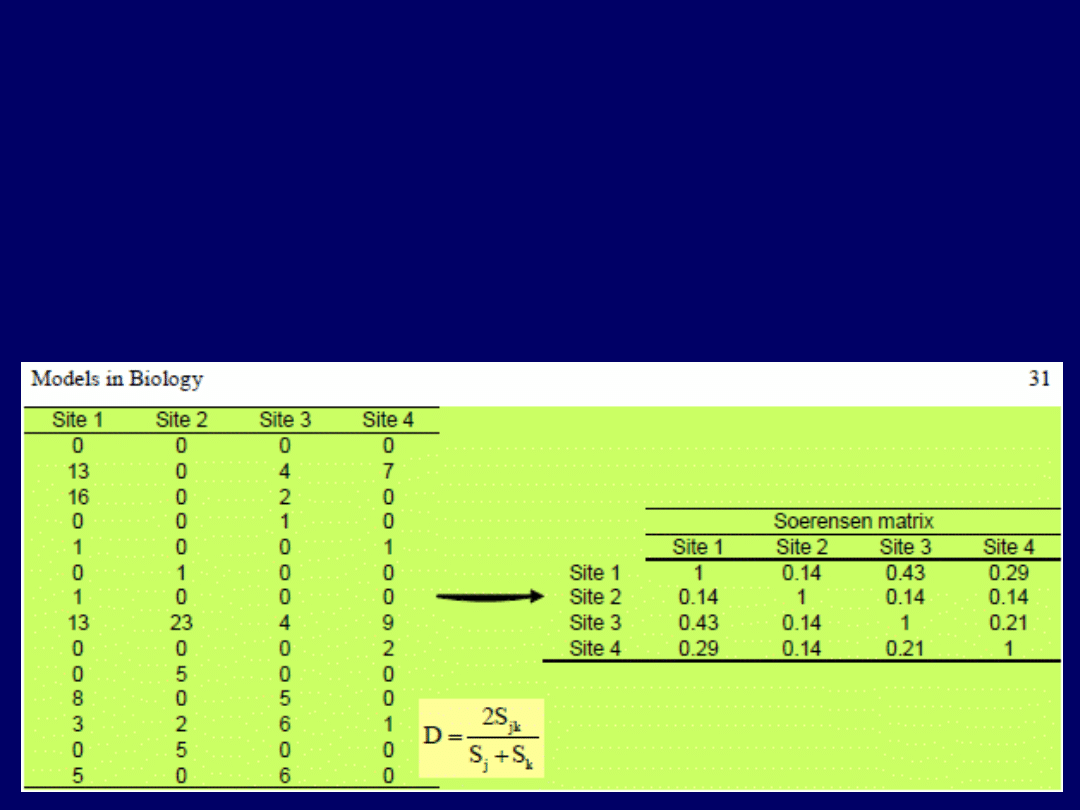
W
biologii
(ekologia, genetyka, taksonomia) często spotykane są
kwadratowe macierze asocjacji
, które mogą być albo
macierzami
podobieństwa
(1 na przekątnej) lub
odległości
(0 na przekątnej). Miarami
podobieństwa mogą być współczynniki Soerensena lub Jackarda, a
odległości – odległość euklidesowa lub jej kwadrat (wykorzystanie w
praktyce: taksonomia numeryczna/analiza skupień). Przykład tworzenia
tego typu macierzy (ze skryptu):
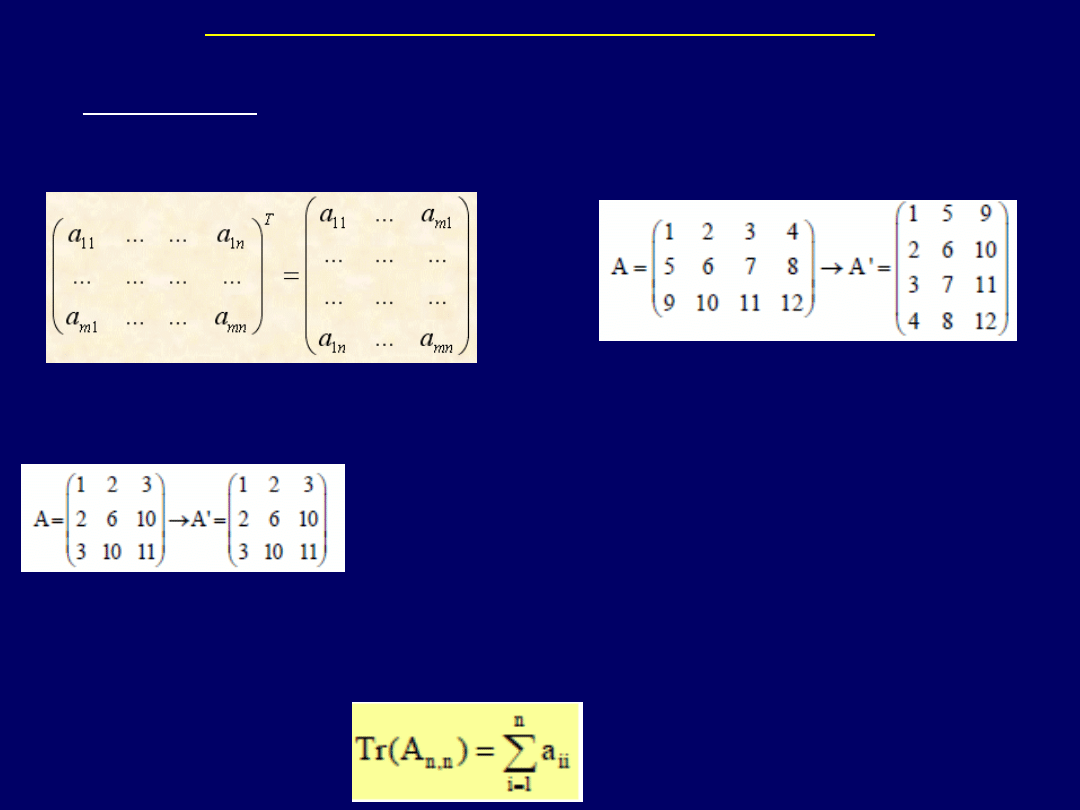
I. Podstawowe operacje i działania na macierzach
1.
Transpozycja (przestawienie) macierzy – polega na
zamianie jej wierszy
na kolumny, a kolumn – na wiersze
(transponowaną macierz A,
oznaczamy
A’
lub
A
T
).
Przykład:
W wyniku
transpozycji kwadratowej macierzy symetrycznej
, uzyskuje-my
macierz identyczną z wyjściową
:
Transpozycja macierzy ma własności:
(A
T
)
T
= A
(A + B)
T
= A
T
+ B
T
(A B)
T
= B
T
A
T
Suma wszystkich elementów na przekątnej
kwadratowej macierzy
symetrycznej, nazywana jest jej
śladem
(ang.: trace):
2. Dodawanie i odejmowanie macierzy
Sumą macierzy
A
mxn
i B
mxn
nazywamy taką macierz
C
mxn
(C = A + B),
że dla
każdej pary
wskaźników (i,j) zachodzi
równość
:
c
ij
= a
ij
+ b
ij
.
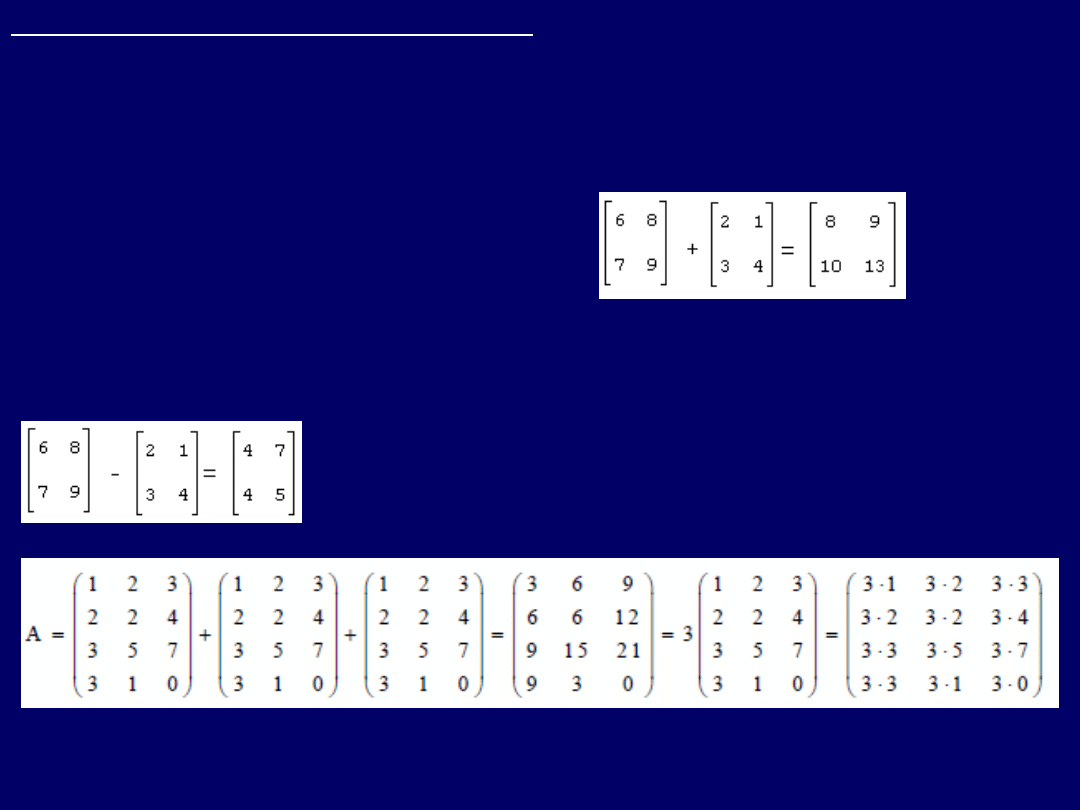
Stąd wniosek, że
można dodawać tylko macierze o takich samych wymiarach
(w przypadku macierzy kwadratowych – tego samego stopnia). Przykład
dodawania:
Dodawanie macierzy jest
przemien-
ne: A + B = B + A
i
łączne:
(A + B) + C = A + (B + C)
.
Odejmowanie macierzy
można potraktować, jako
dodawanie
elementów
macierzy
ze znakiem ujemnym/przeciwnym
. Przykład odejmowania
macierzy:
Powtarzane dodawanie
do siebie tej samej
macierzy, równoważne jest jej
przemnożeniu
przez skalar
, odpowiadający liczbie
powtarzanych operacji dodawania:
Mnożenie macierzy przez skalar jest przemienne, łączne i rozdzielne
względem dodawania
.
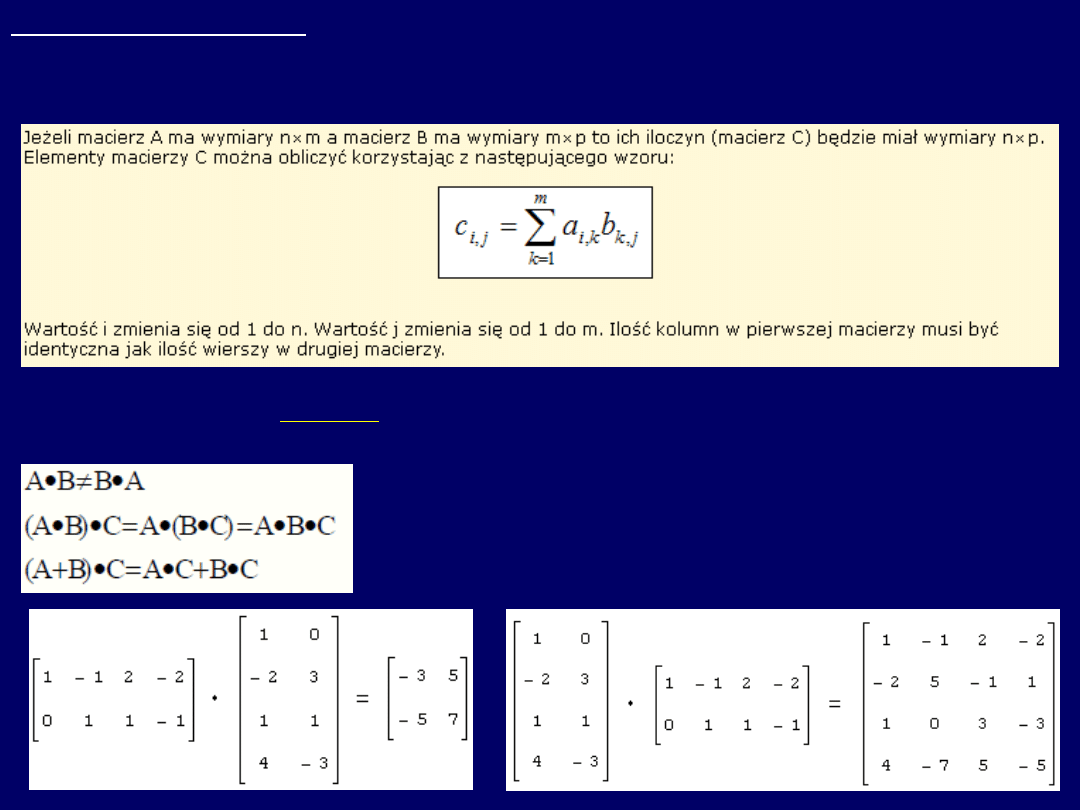
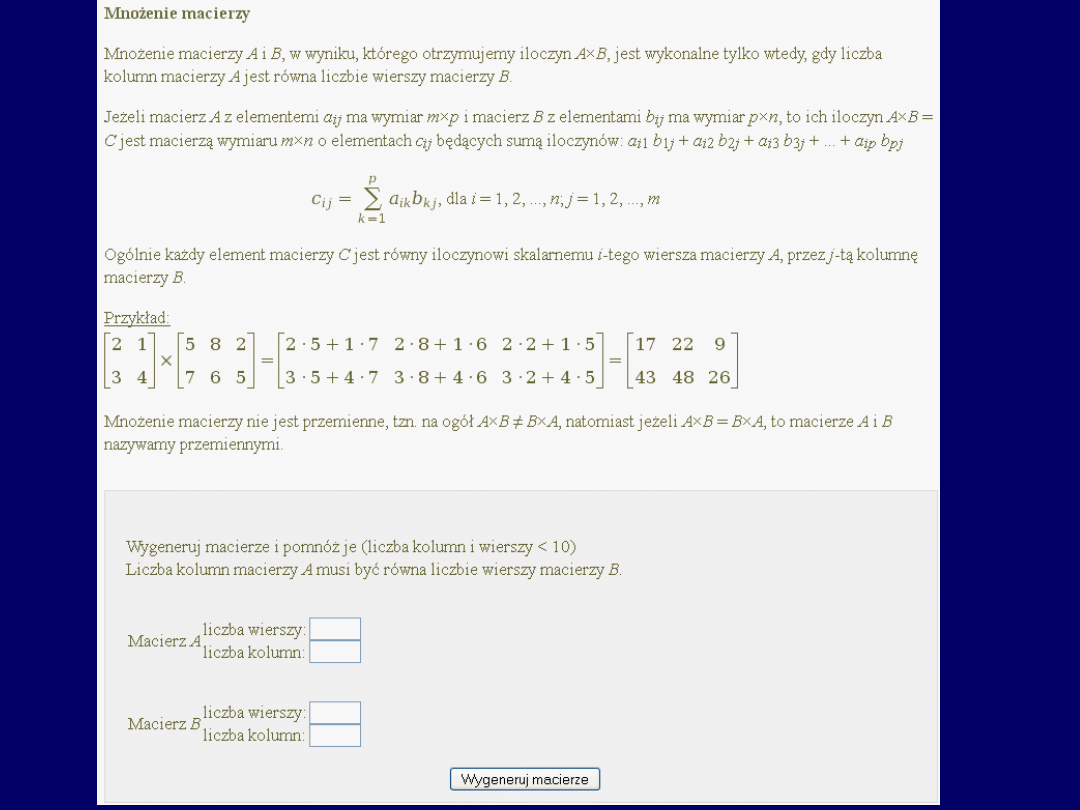
3. Mnożenie macierzy
Ogólny algorytm mnożenia przez siebie macierzy jest następujący (za
źródłem: http://www.bazywiedzy.com/mnozenie-macierzy.php ):
Mnożenie macierzy
nie jest przemienne
, jest
łączne
i
rozdzielne wzglę-dem
dodawania
:
Macierze można mnożyć liczba kolu-
mn I-szej mac.=liczbie wierszy mac.II.
Przykład na
nieprzemienność
mnożenia
macierzy:
Nawet
mnożenie macierzy kwadratowych
najczęściej
nie jest przemienne
;
jeśli tak – to macierze nazywamy
przemiennymi
. Mnożenie macierzy
kwadratowej przez siebie, równoznaczne jest z podnoszeniem jej do
potęgi, np.:
A A = A
2
i
A A A = A
3
.
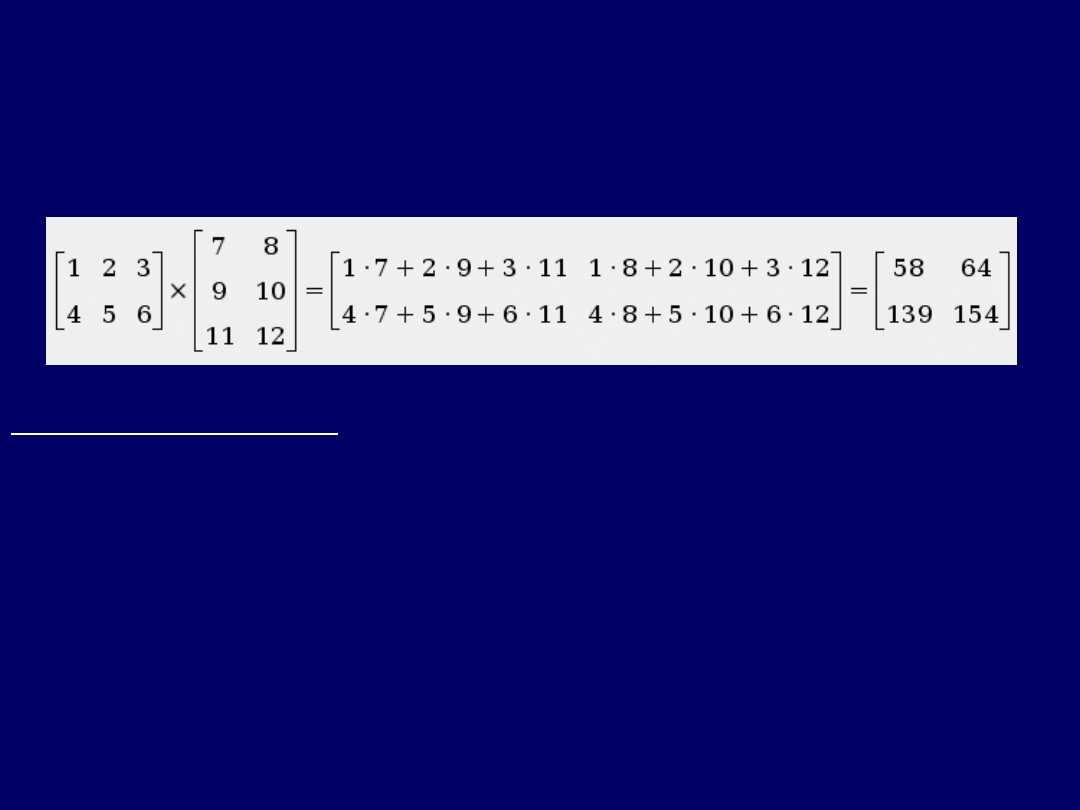
Iloczyn macierzy diagonalnych jest
macierzą diagonalną
. Przykład na mnożenie macierzy – z rozpisaniem
wyników pośrednich:
4. Odwracanie macierzy
O ile macierze,
można dzielić przez skalar
(co jest traktowane jako mnożenie
– przez jego odwrotność), to
dzielenie macierzy przez macierz nie jest
możliwe
(podobnie, jak w przypadku wektorów: brak jednoznacznego
wyniku – nieskończenie wiele rozwiązań).
Macierze można odwracać
.
Odwracanie macierzy polega na
znajdowaniu macierzy odwrotnej
w
stosunku do danej. Jest ono możliwe tylko wtedy, gdy macierz jest
niesosobliwa
i gdy ma
nieze-rowy
wyznacznik
(patrz dalej). Macierz
kwadratową B = [b
ij
]
nxn
nazy-wamy
odwrotną
do macierzy kwadratowej A
= [a
ij
]
nxn
, jeśli spełniony jest warunek:
A B = B A = I
n
.
Macierz odwrotną
wobec A ozn. A
–1
.
Macierz osobliwa
, to taka macierz kwadratowa, która
nie daje się odwrócić
. W
macierzach osobliwych,
pewne wiersze lub kolumny można wyrazić jako
kombinacje liniowe innych kolumn/wierszy
. Takie kolumny wiersze
nie
zawierają unikalnej informacji
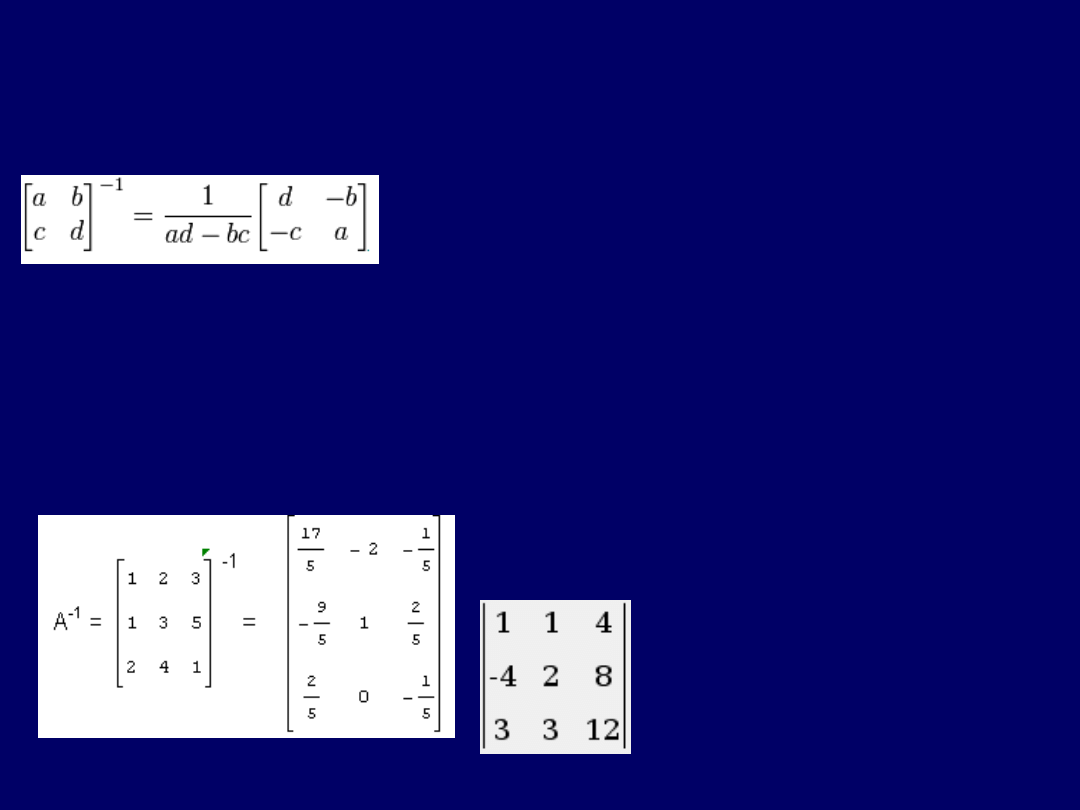
(są zbyteczne). Macierz 22, można
odwrócić zgodnie z równaniem:
Odwracanie większych macierzy jest kłopot-
liwe i w praktyce są tu pomocne programy
komputerowe. Przy analitycznym odwracaniu
macierzy, przydatna jest
znajomość jej wyznacznika
(patrz dalej). Jeżeli A
jest macierzą nieosobliwą, to:
(A
–1
)
T
=
(A
T
)
–1
oraz
(A
–1
)
–1
= A
. Jeżeli A i B są
nieosobliwymi macierzami tego samego stopnia, to:
(A B)
–1
= B
–1
A
–1
(kolejność jest tu istotna, gdyż zazwyczaj mnożenie macierzy jest
nieprzemienne). Macierz kwadratową A spełniającą warunek:
A
T
A = A
A
T
= I
, jest
macierzą ortogonalną
. Przykład odwracania macierzy:
Przykład macierzy osobliwej:
(inaczej: zdegenerowanej;
ang.: „singular”)
W podanym uprzednio przykładzie macierzy osobliwej, trzecia kolumna
powstała przez przemnożenie kolumny II-giej przez 4 – czyli
jest jej liniową
kombinacją
. Odwracanie macierzy można przeprowadzić zgodnie z
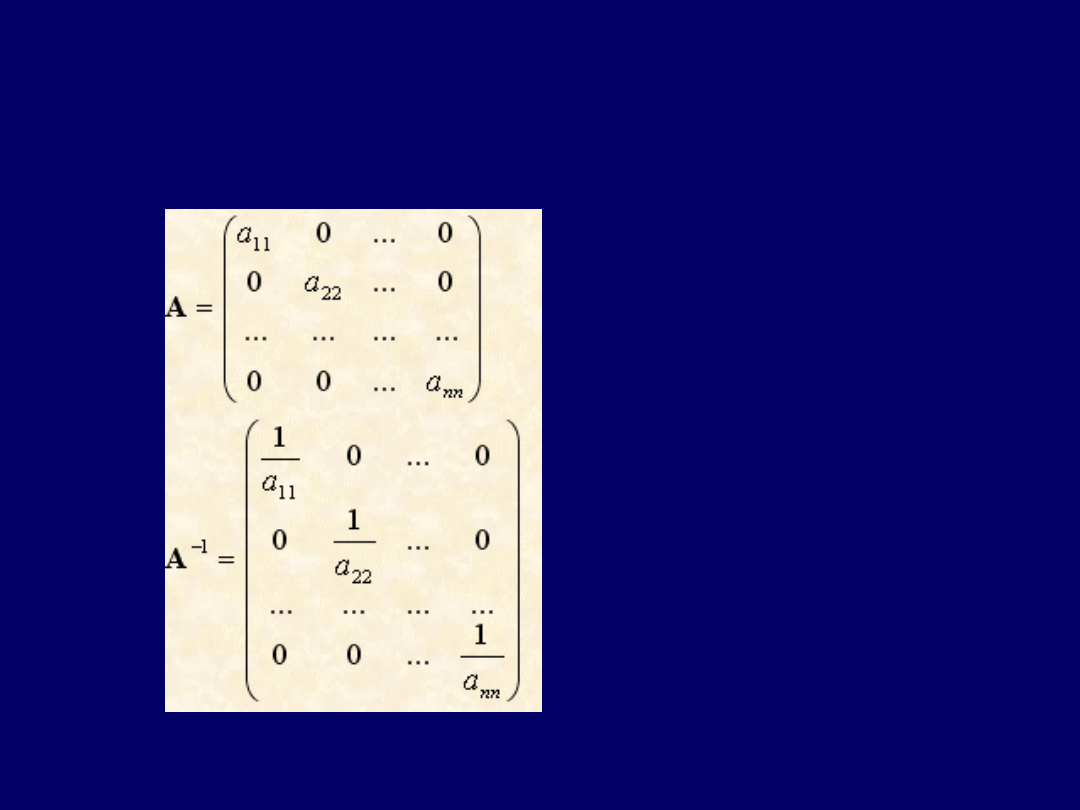
algorytmem Gaussa-Jordana (wykład, skrypt). Przy
odwra-caniu macierzy
diagonalnej
, uzyskujemy również
macierz diagonal-ną
, na przekątnej
której są odwrotności elementów macierzy wyjś-ciowej:
II. Wyznaczniki macierzy
Ważnym parametrem macierzy kwadratowych są ich
wyznaczniki
(dla
macierzy A
nxn
, wyznacznik zapisywany jest jako
det A
lub
|A|
). Dla
n = 1, wyznacznik jest równy jedynemu elementowi macierzy. Jeżeli
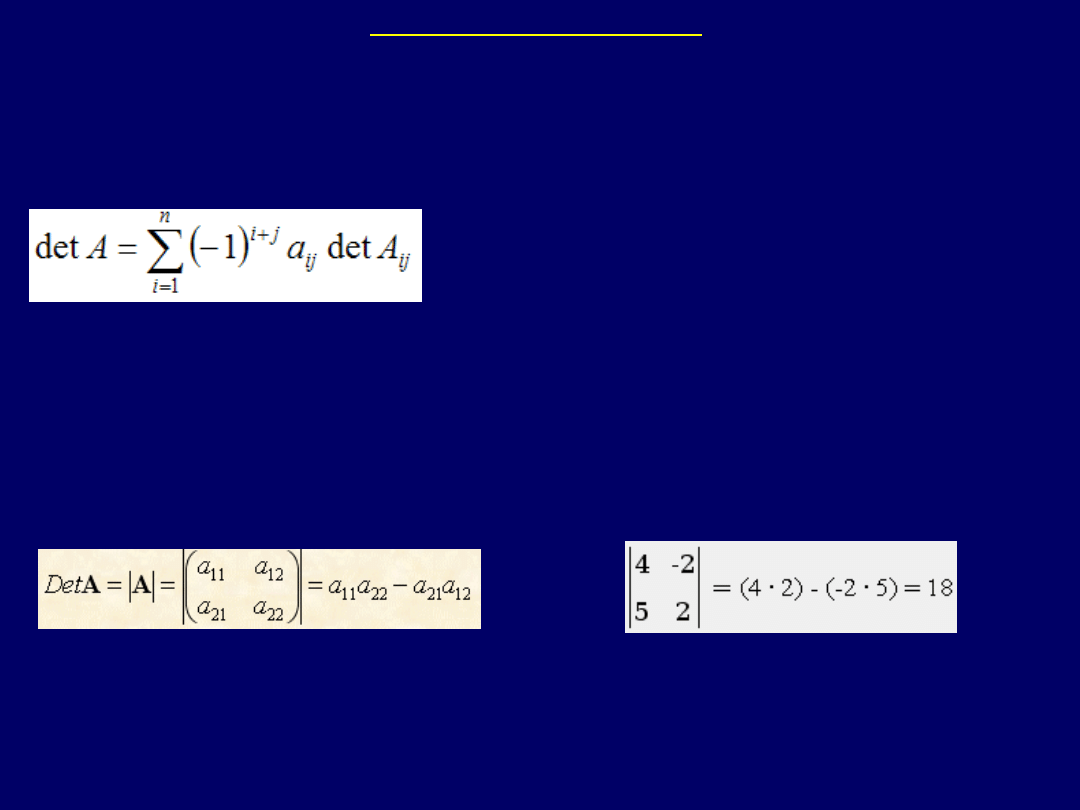
macierz A ma stopień n > 1, to jej wyznacznik można obliczyć
ze wzoru:
, gdzie
det A
ij
oznacza wyznacznik
powstały po skreśleniu i-tego wiersza
i j-tej kolumny wyjściowej macierzy
(czyli jej
minor
).
Dopełnieniem algebrai-
cznym
(D
ij
) elementu macierzy kwadratowej nazywamy
iloczyn jej minora
przez (–1)
i+j
. Wartość wyznacznika |A| stopnia n obliczamy ze wzoru:
|A| =
a
1j
D
1j
+ a
2j
D
2j
+…+ a
nj
D
nj
(j = 1, 2, 3,…n) lub
|A| = a
i1
D
i1
+ a
i2
D
i2
+…+ a
in
D
in
(i = 1, 2, 3,…n). Są to tzw.
wzory Laplace’a
na rozwinięcie wyznacznika
odpowiednio wg j-tej kolumny lub i-tego
wiersza. W praktyce, wyznacznik macierzy 22, można wyliczyć z
równania:
Przykład:
Dla
macierzy 33
, możemy zastosować tzw.
regułę Sarrusa
, gdzie po prawej
stronie macierzy dopisujemy jej I-sze 2 kolumny, a następnie tworzymy
iloczyny elementów macierzy ze znakami „+” wzdłuż strzałek czerwonych
i „–” – wzdłuż strzałek niebieskich:
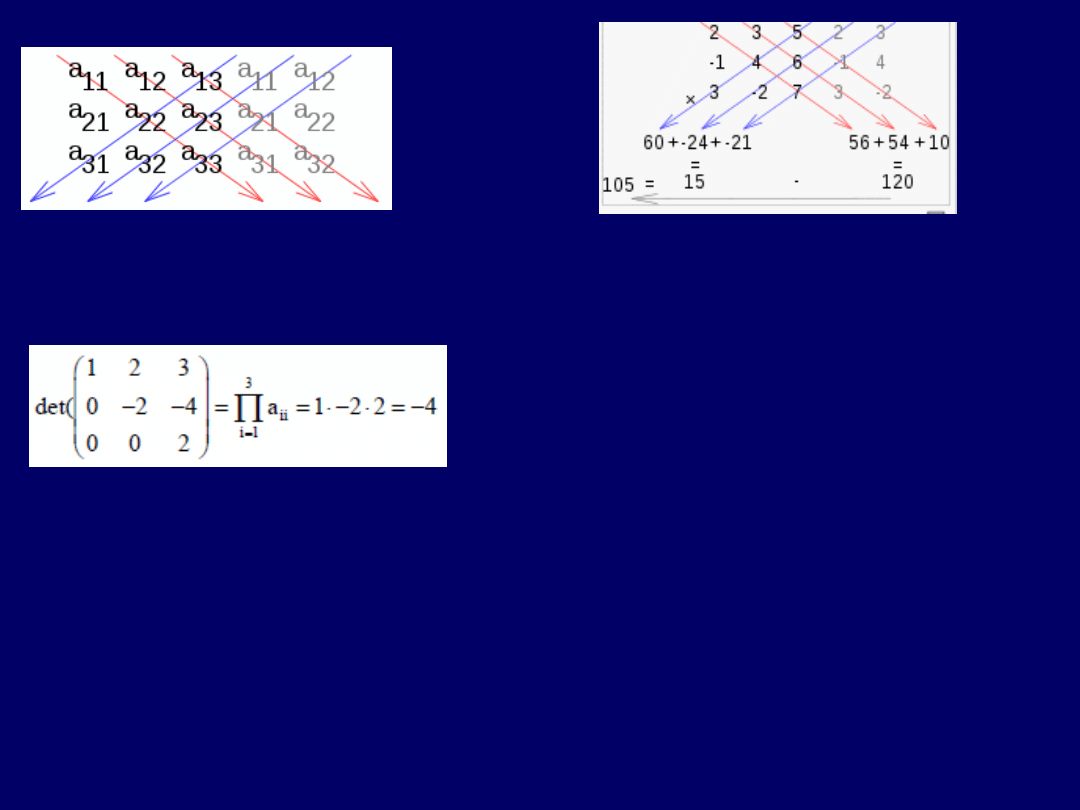
Ogólny schemat Sarrusa:
Przykład:
Współcześnie,
wyznaczniki macierzy większych niż 33, wyliczane są za
pomocą programów komputerowych
.
Wyznacznik macierzy trój-kątnej
(tak
górnej, jak i dolnej), jest
iloczynem elementów jej prze-kątnej głównej
:
Podstawowe własności wyznaczników:
1. Wyznacznik transpozycji macierzy,
równy jest wyz. macierzy wyjściowej:
det A
T
= det A
;
2. Jeżeli 1 z wierszy (lub kolumn) macierzy
A składa się
z samych zer
, to
det A = 0
;
3. Jeżeli zamienimy miejscami 2 wiersze (lub 2 kolumny), to
wyzna- cznik
zmieni znak na przeciwny
;
4. Jeżeli do elementów jednego wiersza (lub kolumny) dodamy odpo-wiednie
elementy innego wiersza (lub kolumny) pomnożone przez pewną stałą, to
wartość wyznacznika nie zmieni się
;
5.
det (AB) = det A det B
;
6. Jeżeli w macierzy A 2 wiersze (lub 2 kolumny) są
identyczne
,to
|A|=0
.
Zależność pomiędzy wyznacznikiem a odwracaniem macierzy
:
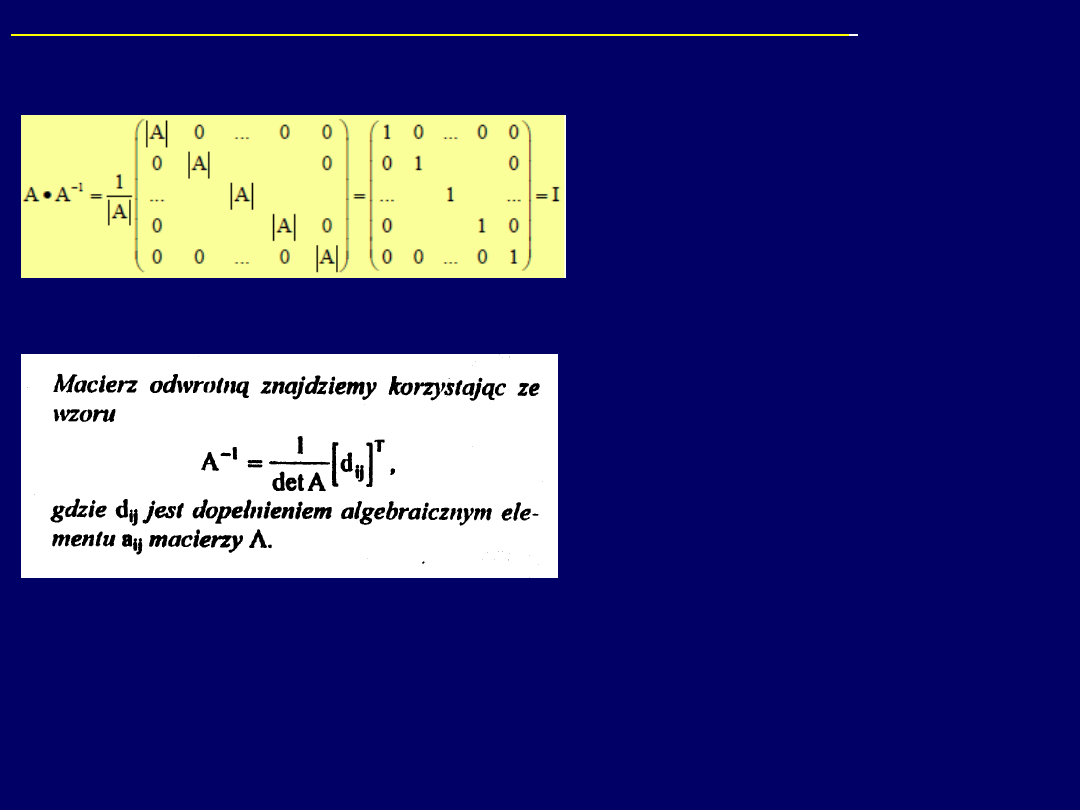
Z definicji macierzy odwrotnej – dla odwracalnych macierzy:
AA
–1
= I
. Można
to rozpisać:
Wniosek:
macierz jest odwracal-
na ma niezerowy wyznacznik
.
Tylko wtedy nie jest ona osobli-
wa. Dla każdej
macierzy osobli-
wej, |A| = 0
.
Wyznacznik można też wykorzystać przy analitycznym odwracaniu ma-cierzy:
Dopełnienie algebraiczne elemen-
tu a
ij
macierzy A liczymy:
d
ij
= (–1)
i+j
M
ij
, gdzie
M
ij
jest mi-
norem macierzy A
, czyli wyznacz-
nikiem podmacierzy powstałej po
skreśleniu i-tego wiersza i j-tej
kolumny z wyjściowej macierzy A.
Transponowana macierz dopeł-nień
algebraicznych
, nazywana jest też
macierzą dodaną
(A
D
, ang: „adjoint
matrix”):
A
D
= [d
ij
]
T
.
Wyznaczniki, są ważne przy
rozwiązywaniu układów równań liniowych
oraz
przy
wyznaczaniu rzędu macierzy
.
III. Rząd macierzy
Rząd macierzy A (rzA) o wymiarach mn jest to
maksymalna liczba
niezależnych liniowo kolumn/wierszy
lub jest
stopniem najwiekszej
kwadratowej podmacierzy nieosobliwej
, zawartej w A. Dla macierzy
prostokątnej o wymiarach mn,
rzA min (m, n)
.
Minorem
(podwyznacznikiem) stopnia k macierzy A
(o wymiarach mn),
nazywamy
wyznacznik macierzy kwadratowej stopnia k, która powstała
po skreśleniu m – k wierszy oraz n – k kolumn
w macierzy A
. Rzędem macierzy niezerowej nazywamy
największy
stopień jej niezerowego minora
. Rząd macierzy nie ulega zmianie, gdy:
a.
wykreślimy kolumnę (wiersz) zerową;
b. --------”------------ wszystkie kolumny (wiersze) proporcjonalne do danej
kolumny (wiersza);
c. Przestawimy kolumny (wiersze);
d.
Dodamy do kolumny (wiersza) inną kolumnę (wiersz) lub sumę in-nych
kolumn (wierszy) pomnożonych przez współczynniki rzeczy-wiste.
Podstawowe własności rzędu macierzy:
1.
rzA min (m, n)
.
2.
rzA = 0 A = 0
(tj. A jest macierzą zerową).
3. Macierz kwadratowa jest
odwracalna jej rząd = jej stopniowi
.
4. Jeżeli B jest macierzą prostokątną o wymiarach nk rzędu n, to
rz(AB) = rzA
. Podobnie jeśli C jest macierzą o wymiarach lm rzędu m,

to
rz(CA) = rzA
.
5. Dla macierzy kwadratowych A i B stopnia n, zachodzi nierówność:
rzA + rzB – n rz(AB)
(nierówność Sylvestera).
6. Jeżeli B jest macierzą o wymiarach o wymiarach mn, to:
rz(A + B) rzA + rzB
.
7.
rzA
T
= rzA
, czyli transpozycja nie zmienia rzędu.
Rząd macierzy można oszacować
wyliczając wyznaczniki pod-
macierzy kwadratowych, pozostających po wykreśleniu kolejnych wierszy i
kolumn
(jeśli wyznacznik jest niezerowy, to rząd macierzy wyjściowej jest
równy stopniowi podmacierzy, której wyznacznik wyliczono). Postępowanie
takie jest bardzo żmudne i obecnie rząd macierzy wylicza się
korzystając z
programów komputerowych
(patrz – ostatnie zadanie w praktycznej części
ćwiczenia). Znajo-mość rzędu macierzy jest niezbędna przy
rozwiązywaniu
układów równań liniowych z wykorzystaniem algebry macierzy
.
Wskazówki do wykonania zadań praktycznych ćw. VI.
• Wskazówki do zadania 1:
Licząc
iloczyn skalarny wektorów
: [1 2 3 4] i , mnożymy I-szy wyraz (liczbę)
z wektora poziomego z I-szym – z wektora pionowego. Analo-gicznie –
mnożymy: II z II, III z III i IV z IV.
Uzyskane iloczyny – sumu-jemy
:
[1 2 3 4] = 1 5 + 2 6 + 3 7 + 4 8 = 5 + 12 + 21 + 32 =
70
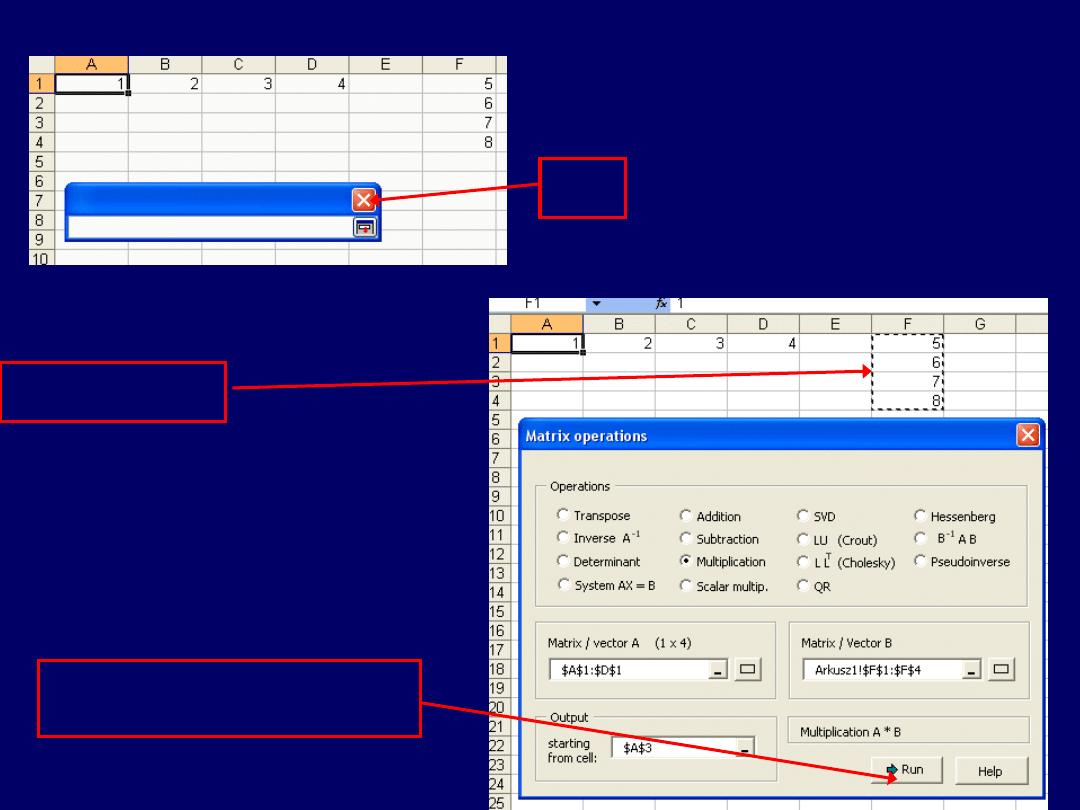
Chcąc wyliczyć to samo, stosując program on-line – po otwarciu
wskazanej witryny internetowej, uzyskujemy następujący ekran
(następne przeźrocze):
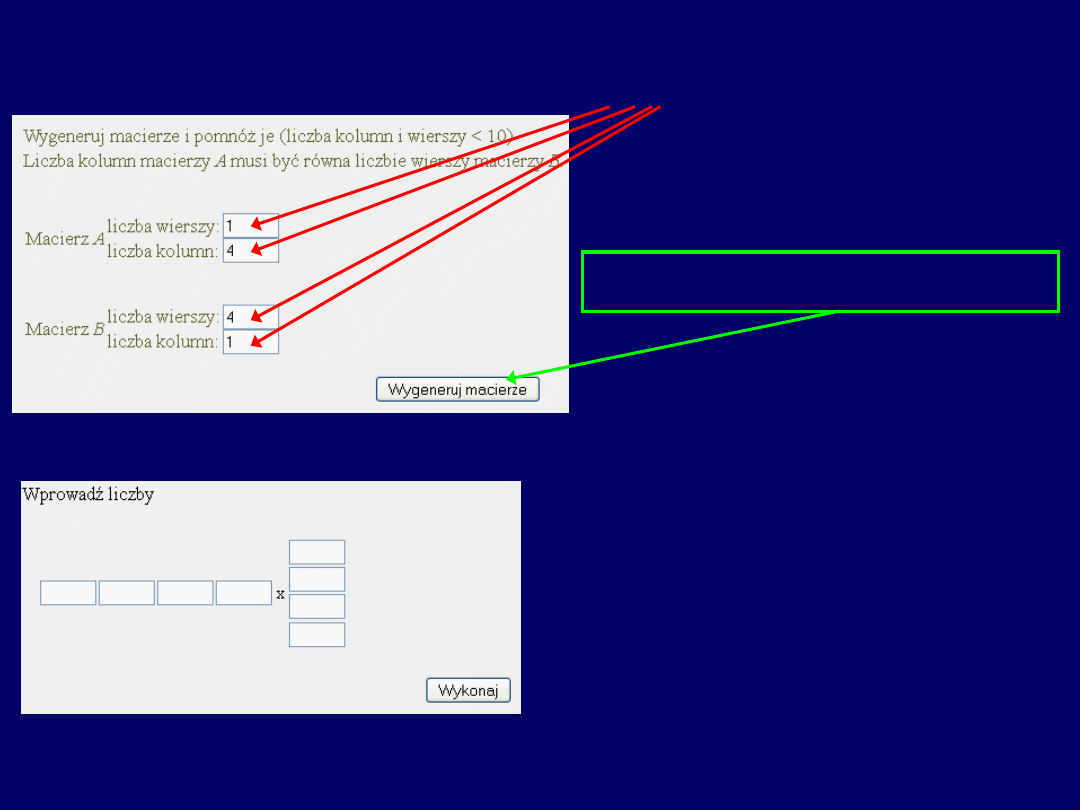
Traktując mnożone przez siebie wektory, jako szczególne przypadki macierzy
(
pierwsza: 1 4, druga: 4 1
), należy wskazać
liczbę kolumn i wierszy w
odpowiednich polach
:
Następnie klikamy w przycisk:
Uzyskujemy wektory/macierze:
z polami do wprowadzania liczb:
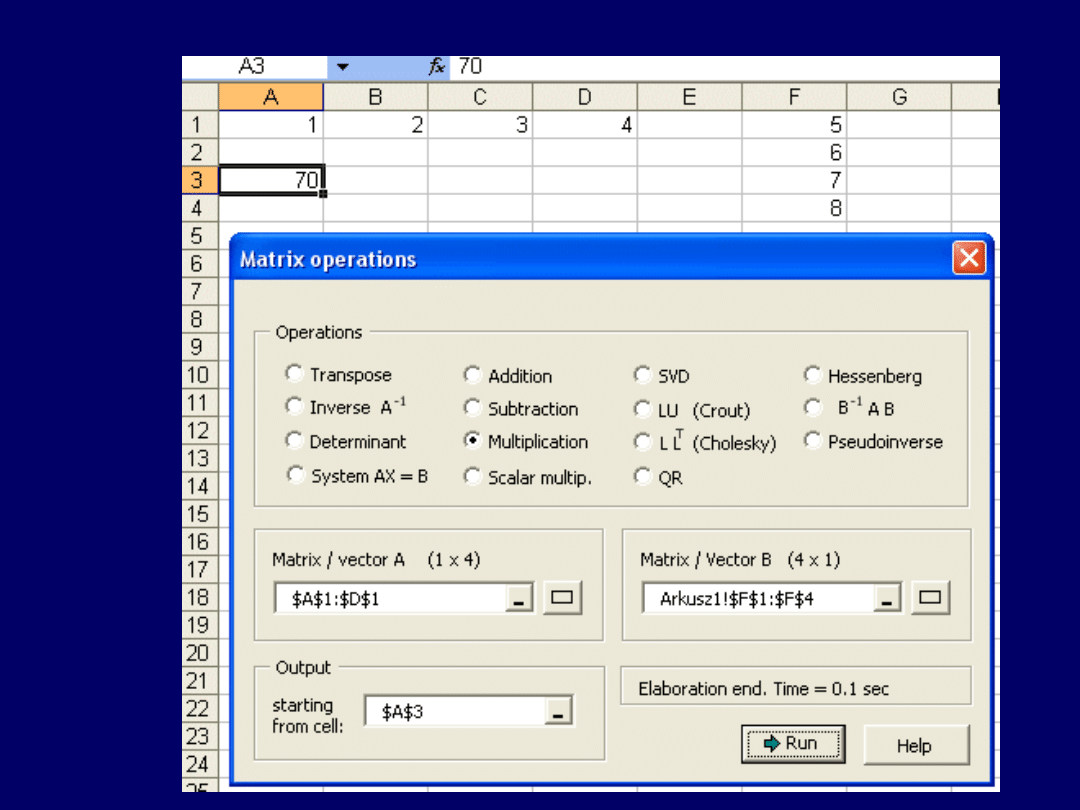
Po wprowadzeniu liczb,
otrzymujemy (następne
przeźrocze):
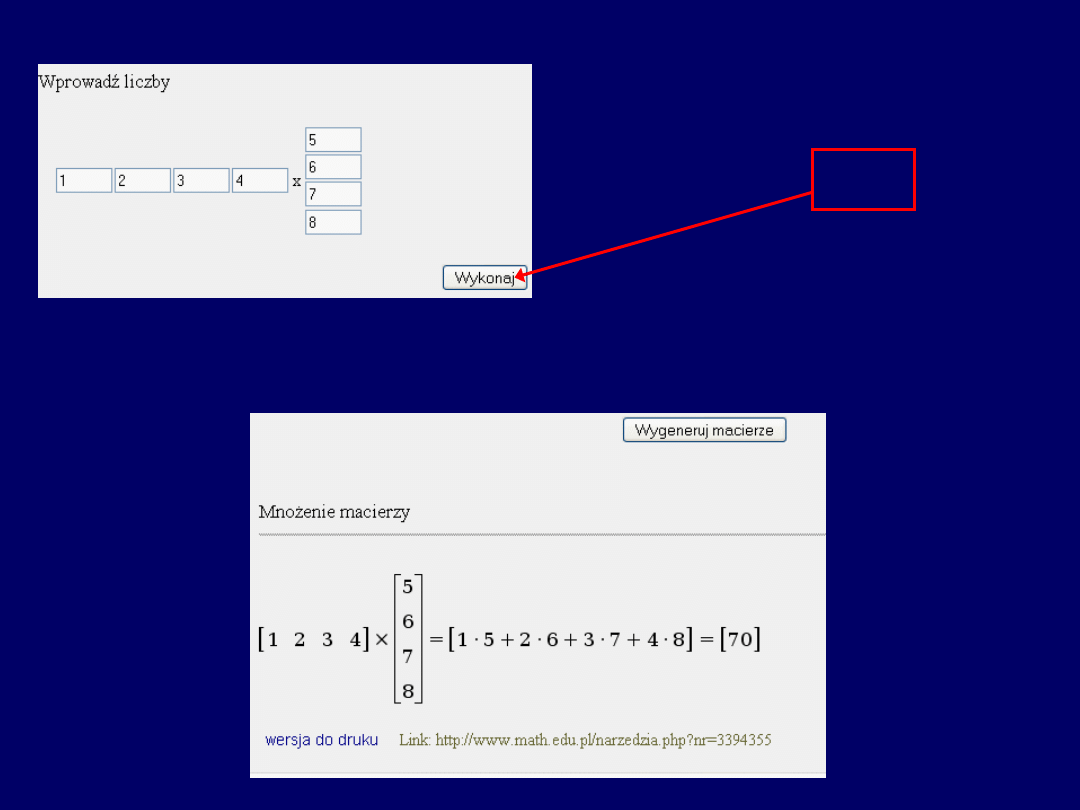
…gotowe do mnożenia (wypełnione liczbami) wektory/macierze:
Dalej – klikamy w przycisk:
„Wykonaj”
Klik
.....i uzyskujemy wynik:
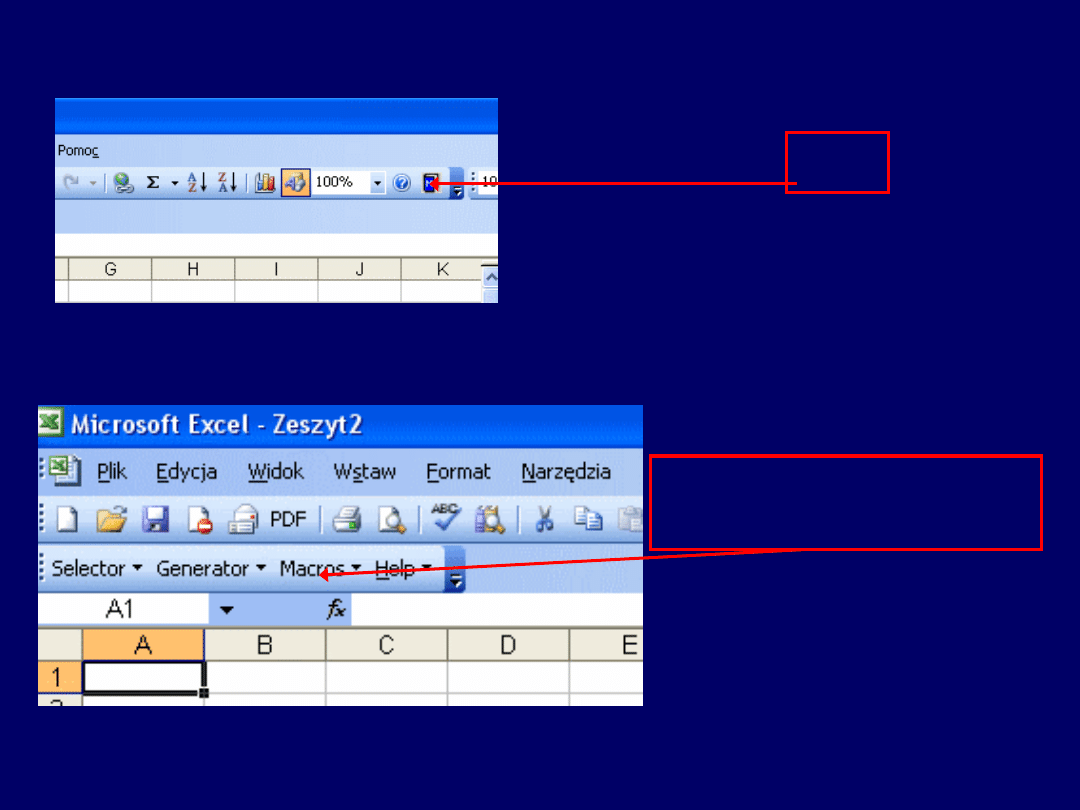
W celu uruchomienia rozszerzenia MS Excel 2003 („Matrix Functions and
Linear Algebra”), należy kliknąć w odpowiednią ikonę MS Excel:
Klik
Ukazuje się zestaw menu
rozszerzenia:
Klikamy w celu otwarcia
w menu „Macros”
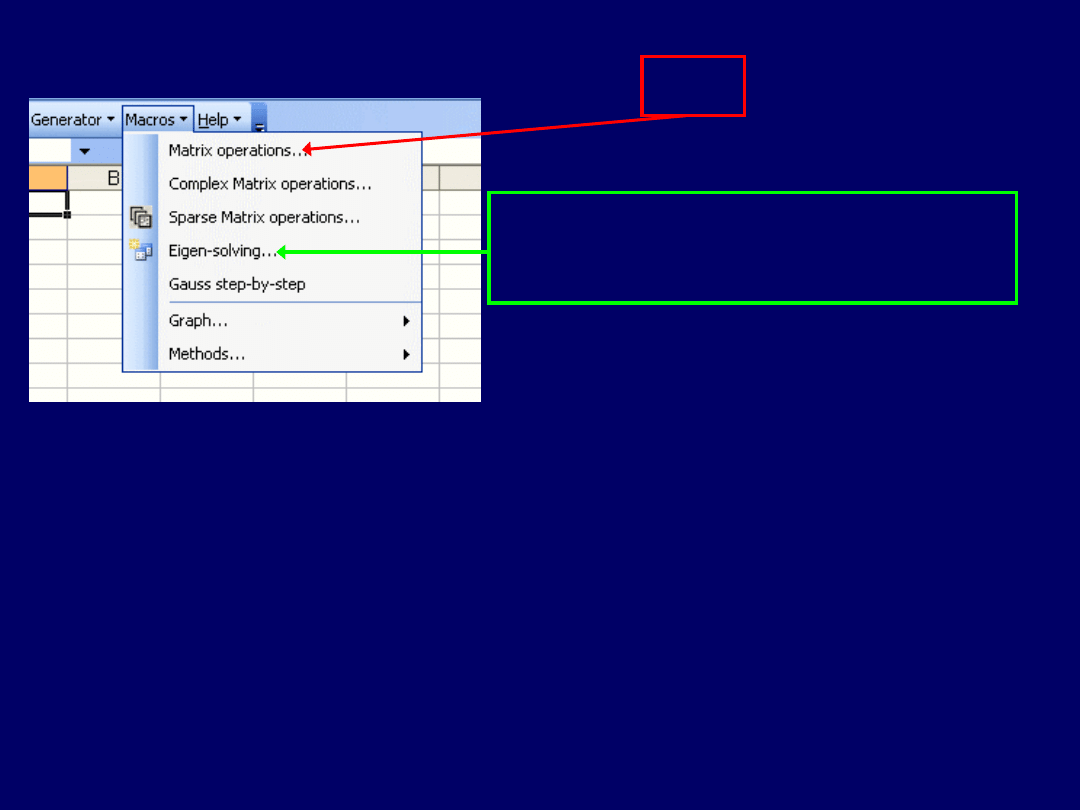
Spośród komend menu „Macros”, na niniejszym ćwiczeniu potrzebna będzie
komenda „Matrix operations…”
Klik
Na ćwiczeniu kolejnym, użyteczna
będzie też komenda:
„Eigen-solving…”:
Po wprowadzeniu do roboczego arkusza Excela odpowiednich
wektorów/macierzy, uruchamiamy: Matrix Matrix operations. Dalej –
wybieramy „Multiplication” (następne przeźrocze):
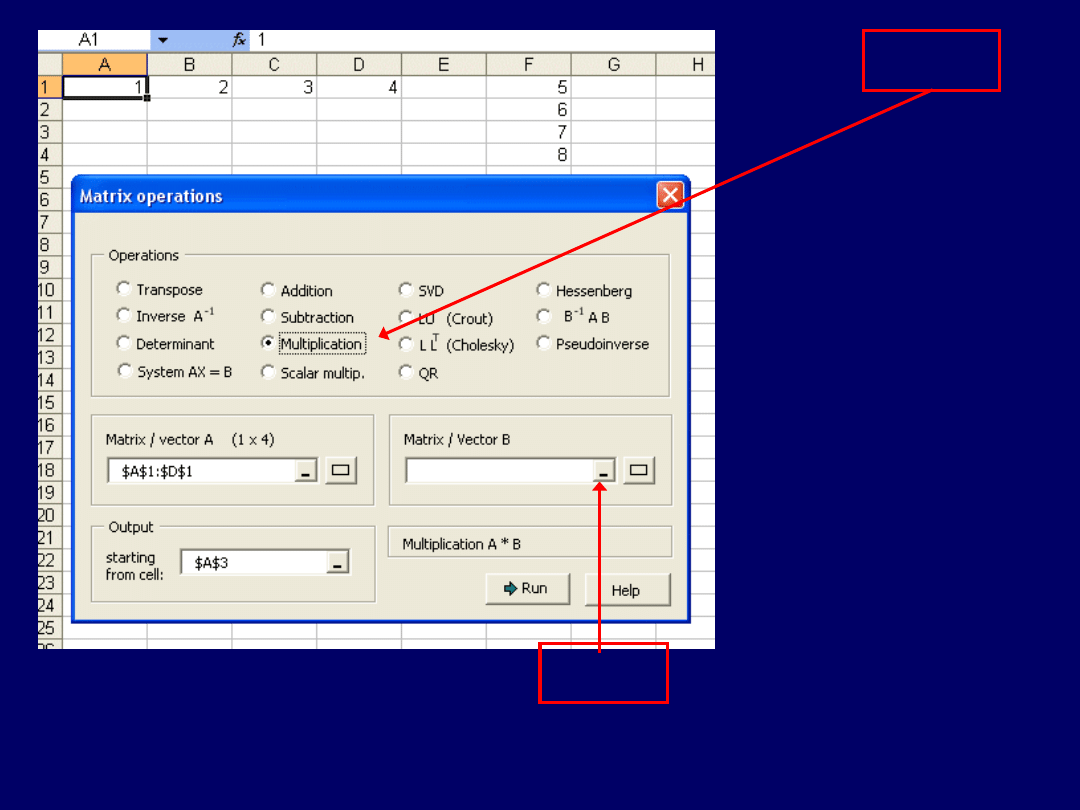
Klik (1)
Wreszcie klikamy w
suwak pola wyboru
drugiej macierzy /
wektora: „Matrix /
Vector B” (pierwsza
macierz/wektor –
„Matrix / Vector A”,
jak również zakres
pola wyników –
Klik (2)
„Output, są już
wybrane)
…pojawia się okienko:
…które zamykamy (o ile nie
zamknie się samo) i wybie-
ramy blok z II-gim
wektorem/macierzą.
Klik
Ekran po wyborze:
Wybrany blok:
Dalej klikamy w przycisk
„Run”
Uzyskujemy wynik:
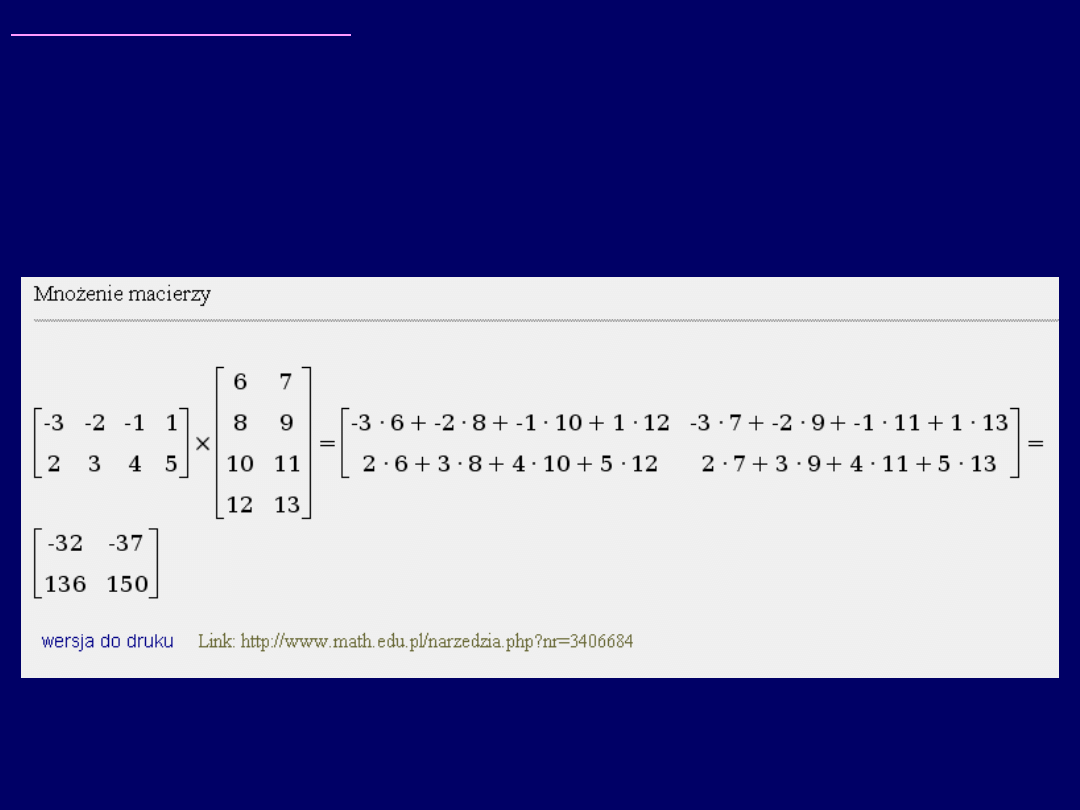
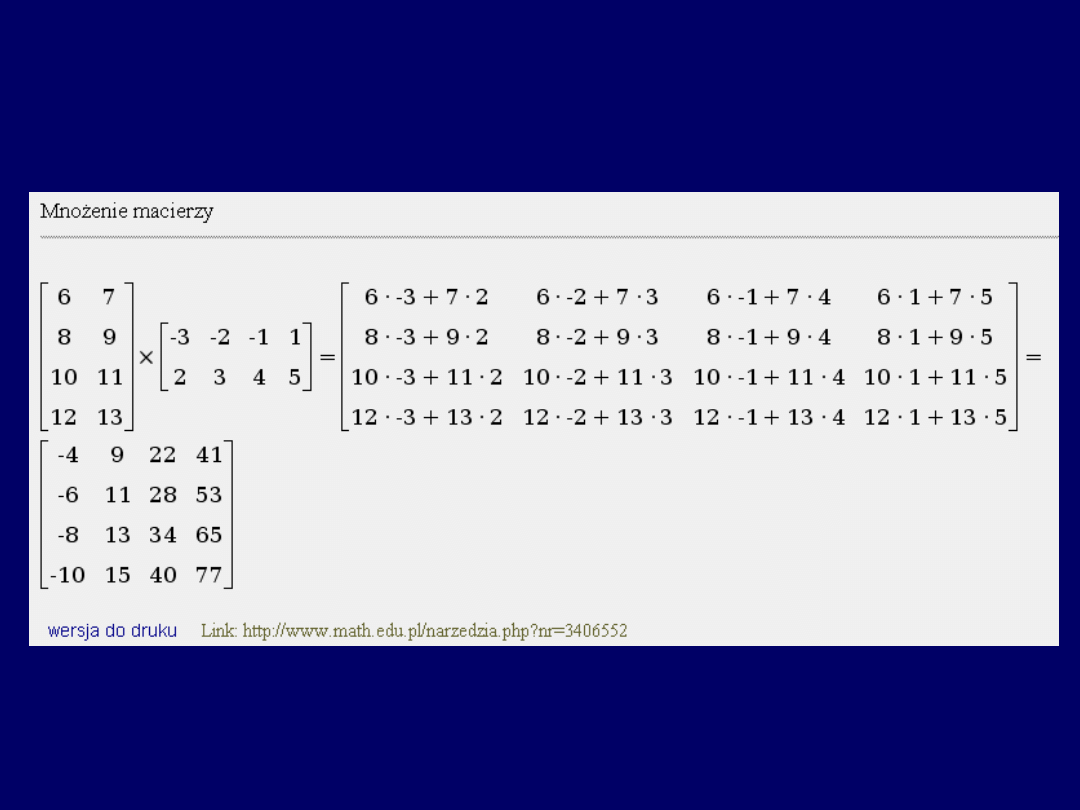
Wskazówki do zadania 2:
Czynności mnożenia, zarówno za pomocą
programu on-line
, jak
i dodatku do MS Excel: „
Matrix Functions and Linear Algebra
” –
wykonujemy
analogicznie
, jak w zadaniu poprzednim. Końcowy wynik
mnożenia wymienionych w zadaniu macierzy (AB),
w programie on-line – wygląda
następująco
:
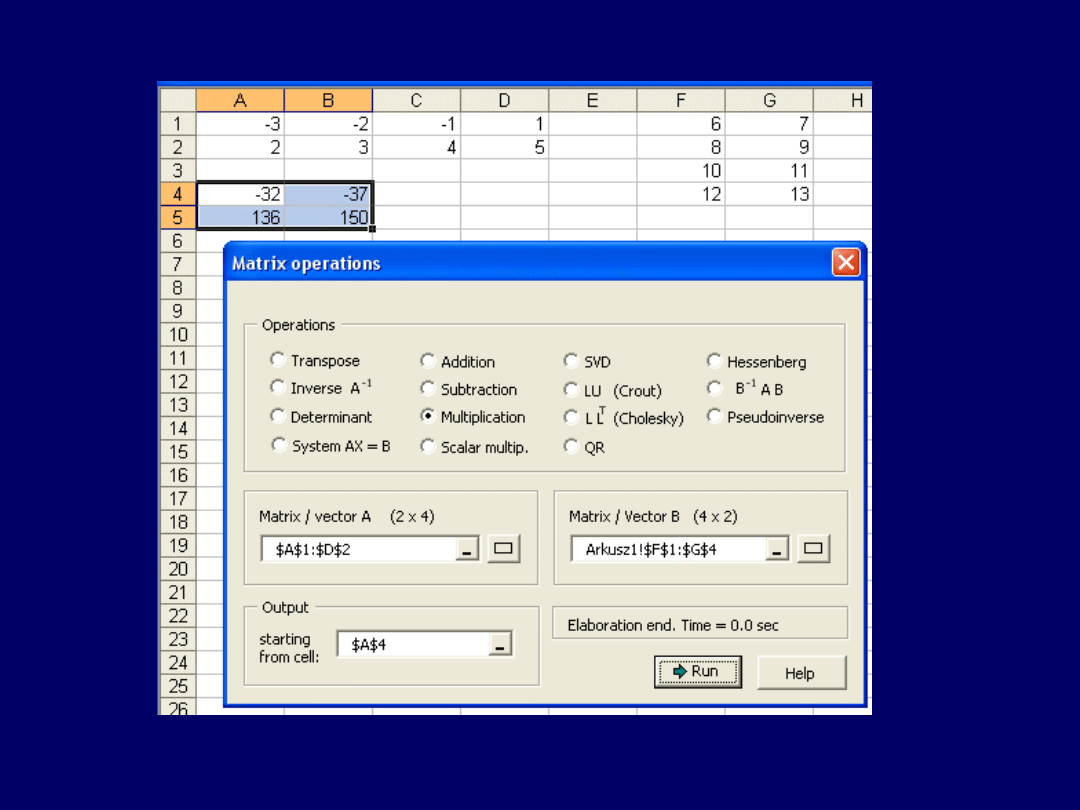
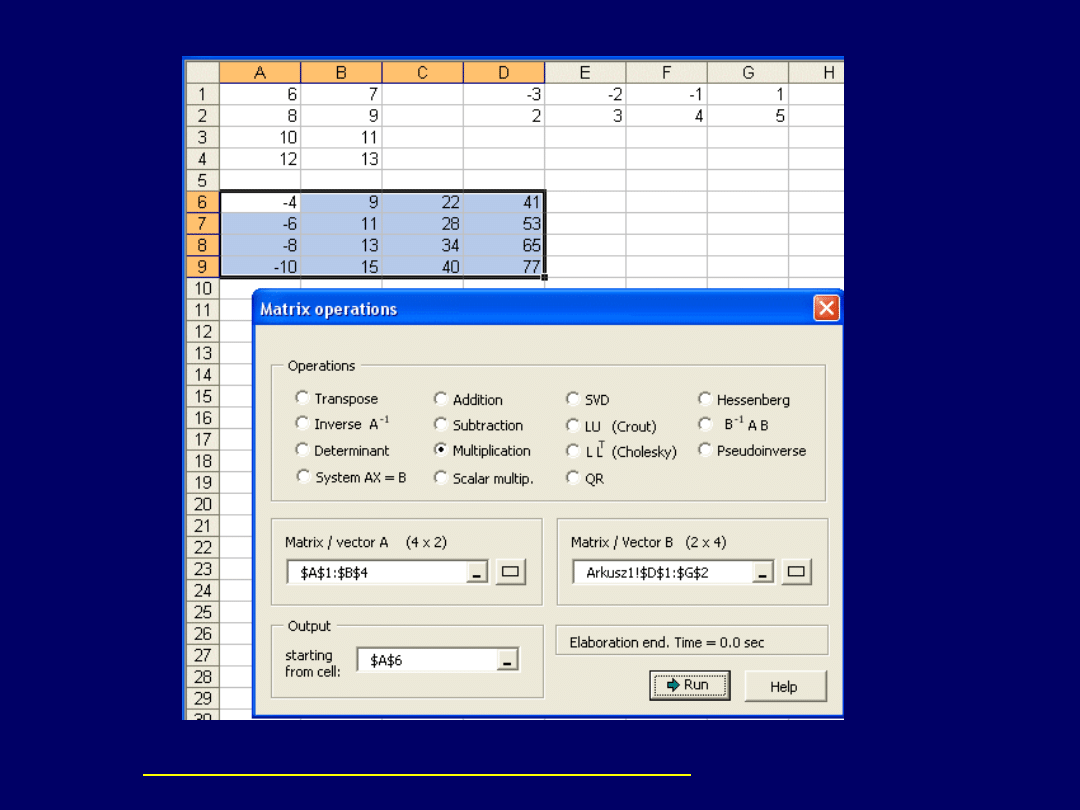
Ostateczny wynik mnożenia tych samych macierzy w MS Excel + „Matrix
Functions and Linear Algebra”:
Wyniki są identyczne – niezależnie od programu użytego do liczenia.
Wyniki mnożenia macierzy w odwróconej kolejności (BA), są odmienne.
Licząc w programie on-line, uzyskujemy:
W MS Excel + „Matrix Functions and Linear Algebra”:
Wniosek:
mnożenie macierzy nie jest przemienne.
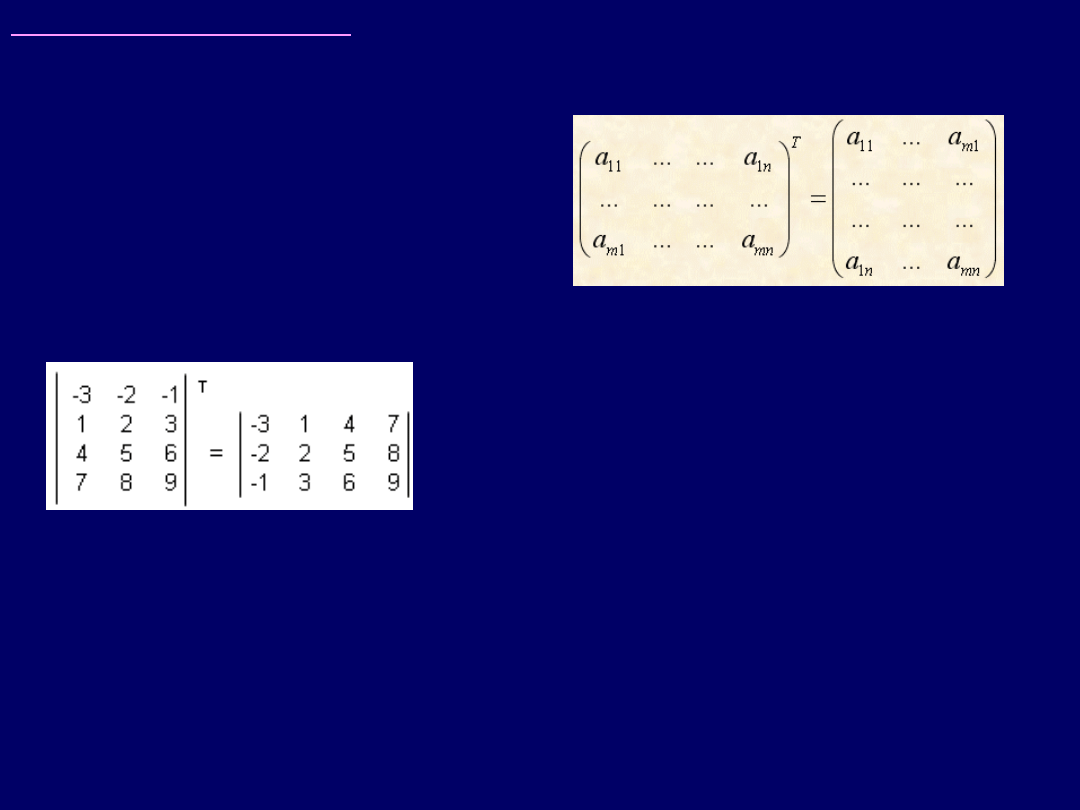
Wskazówki do zadania 3:
Operacja transpozycji macierzy polega na takim jej przekształceniu, aby
wiersze stały się kolumnami
:
W rozpatrywanej na ćwiczeniu
macierzy:
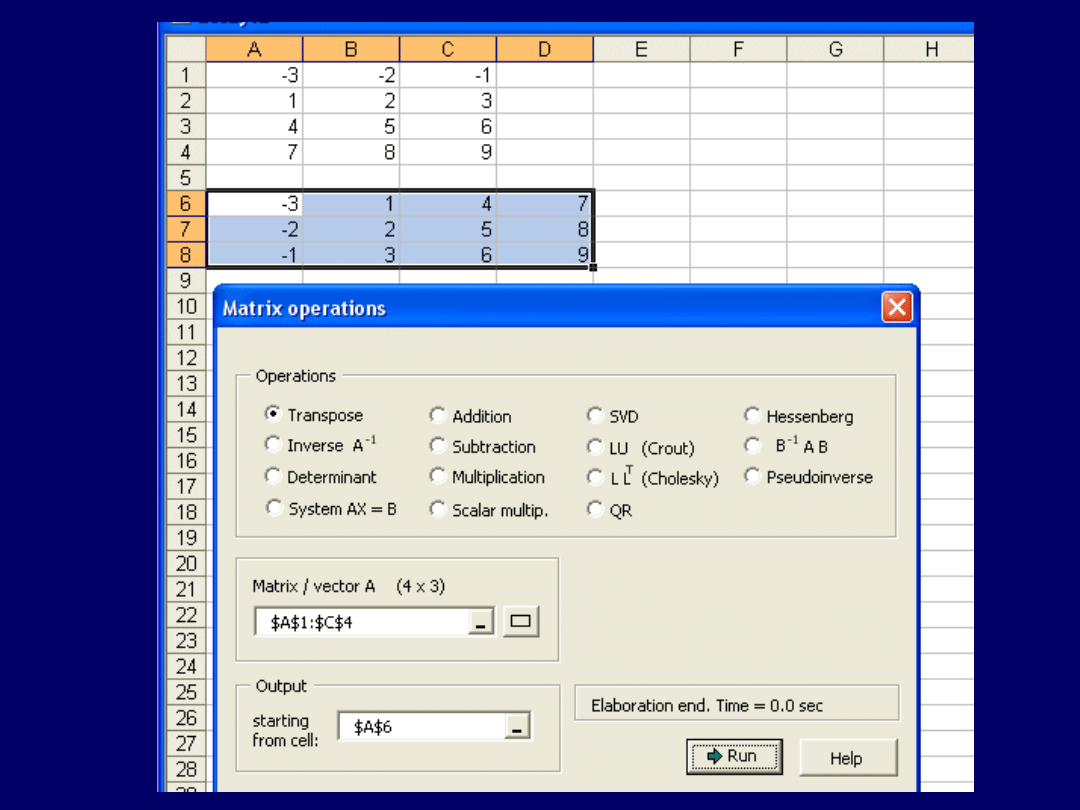
To samo zadanie, wykonane za pomocą MS Excel + „Matrix Functions and
Linear Algebra” – wyniki zgodne! (następne przeźrocze):
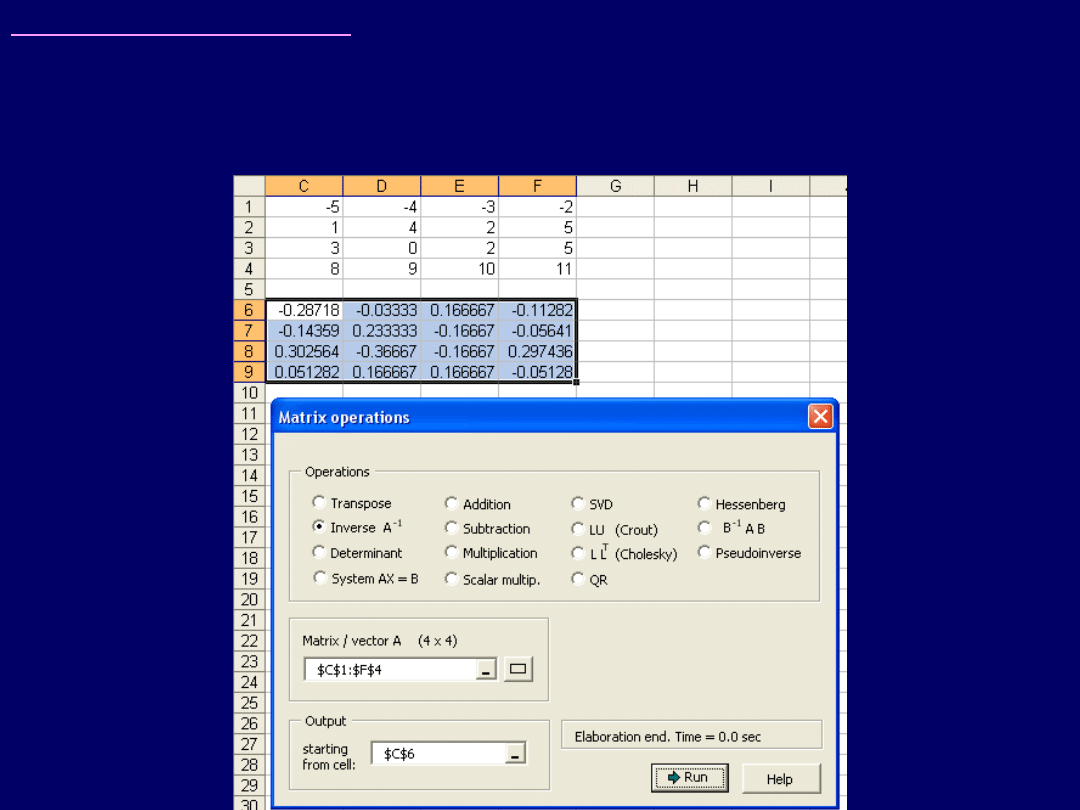
Wskazówki do zadania 4:
Odwracanie macierzy jest możliwe tylko wtedy,
gdy nie jest ona osobliwa
(ang.: „singular”), czyli – gdy żaden jej element (wiersz, kolumna) nie jest
liniową kombinacja innych elementów. Wynik odwrócenia I-szej macierzy:
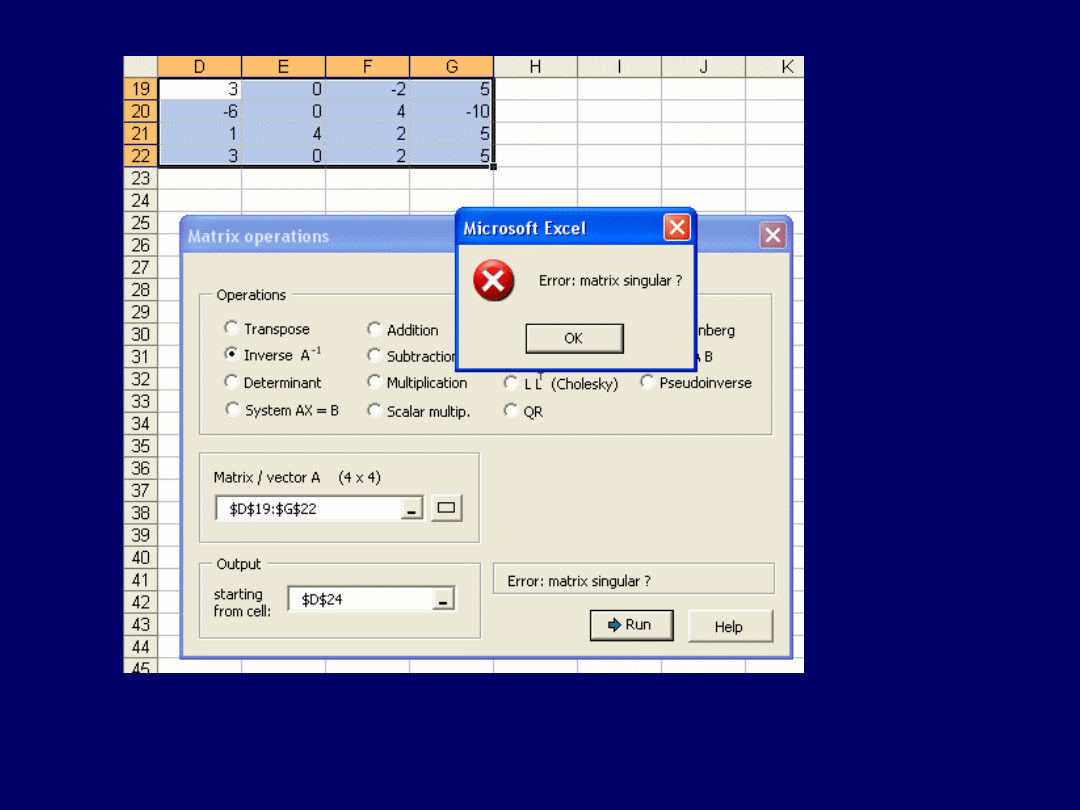
Wynik odwracania II-giej macierzy
nie jest pomyślny
:
Poddawana odwracaniu macierz,
jest osobliwa
– gdyż jej drugi wiersz, jest
wynikiem przemnożenia wiersza pierwszego przez -2.
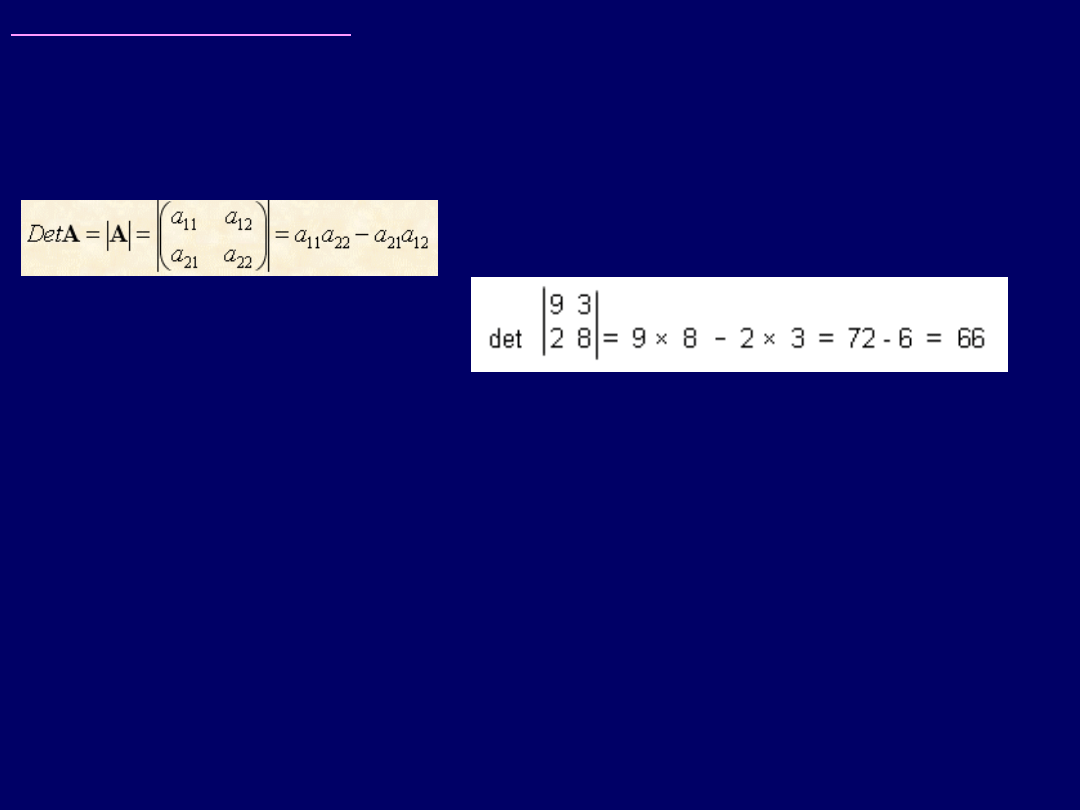
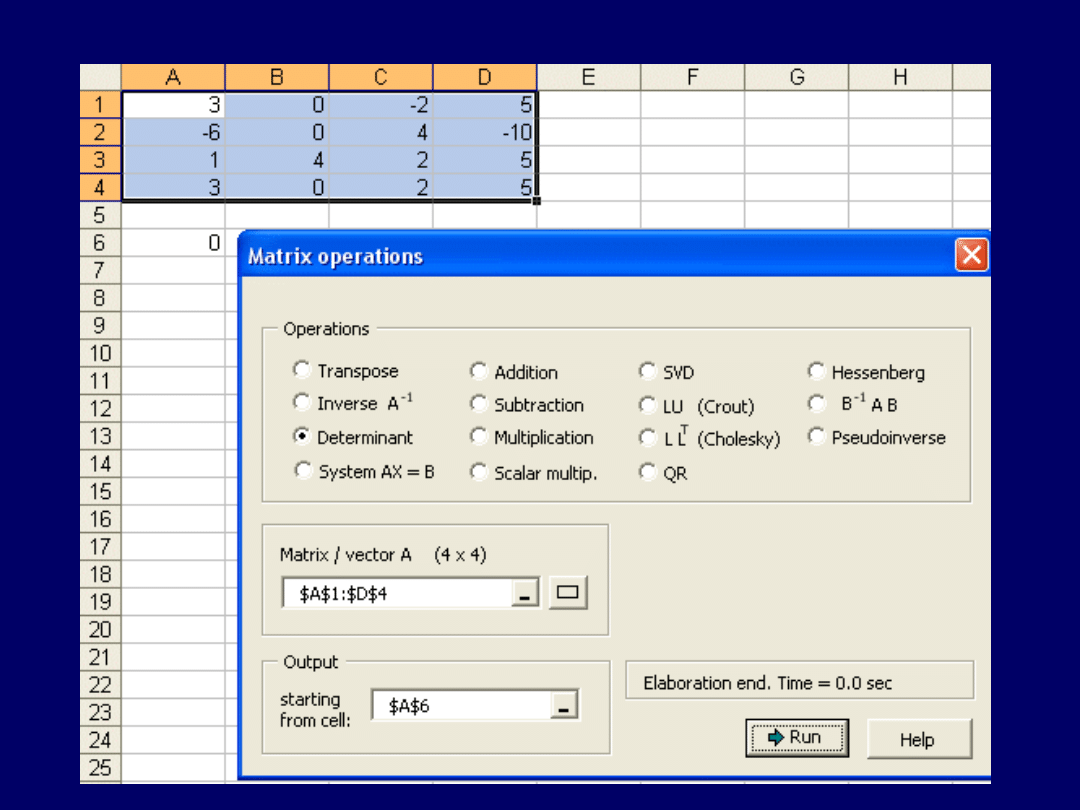
Wskazówki do zadania 5:
Wyznacznik macierzy 22, liczony jest
zgodnie z równaniem
:
W konkretnym przypadku naszego
zadania,
będzie to:
Wyliczenie wyznacznika pierwszej spośród dwu macierzy z poprzedniego
zadania (w „Matrix Functions…”), jest na następnym przeźroczu:
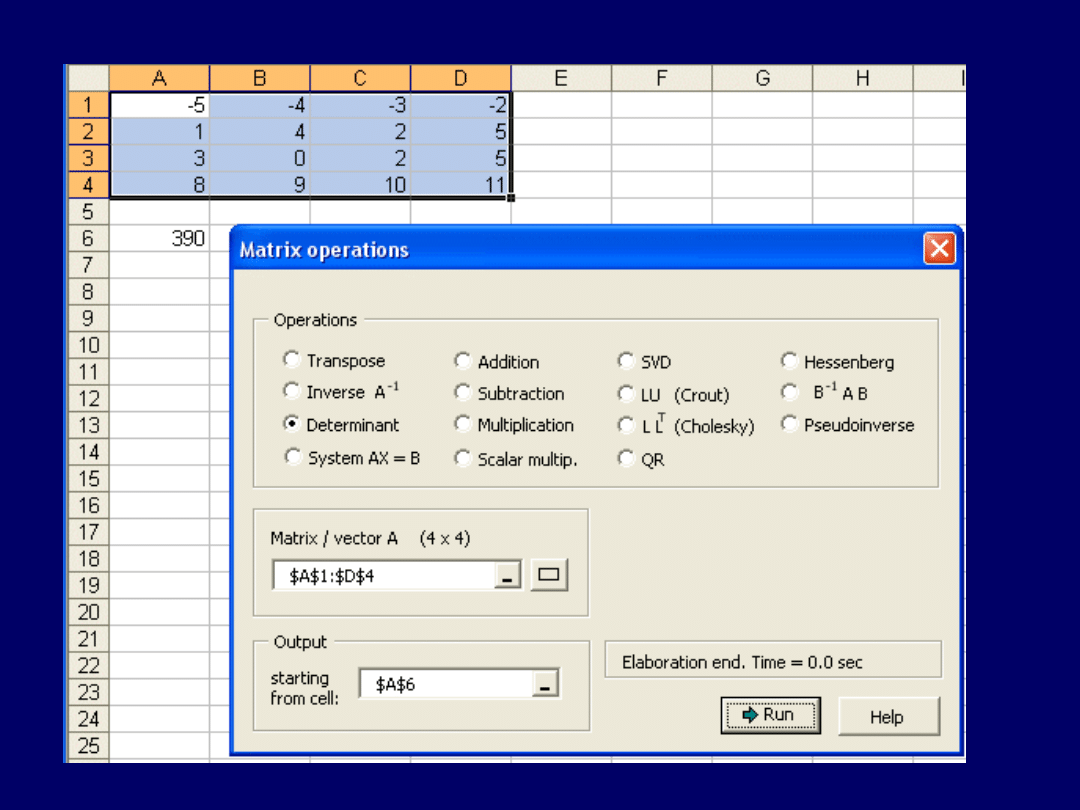
Wyznacznik niezerowy – stąd wniosek, że
macierz nie jest osobliwa
:
Wyznacznik = 0
macierz osobliwa
!
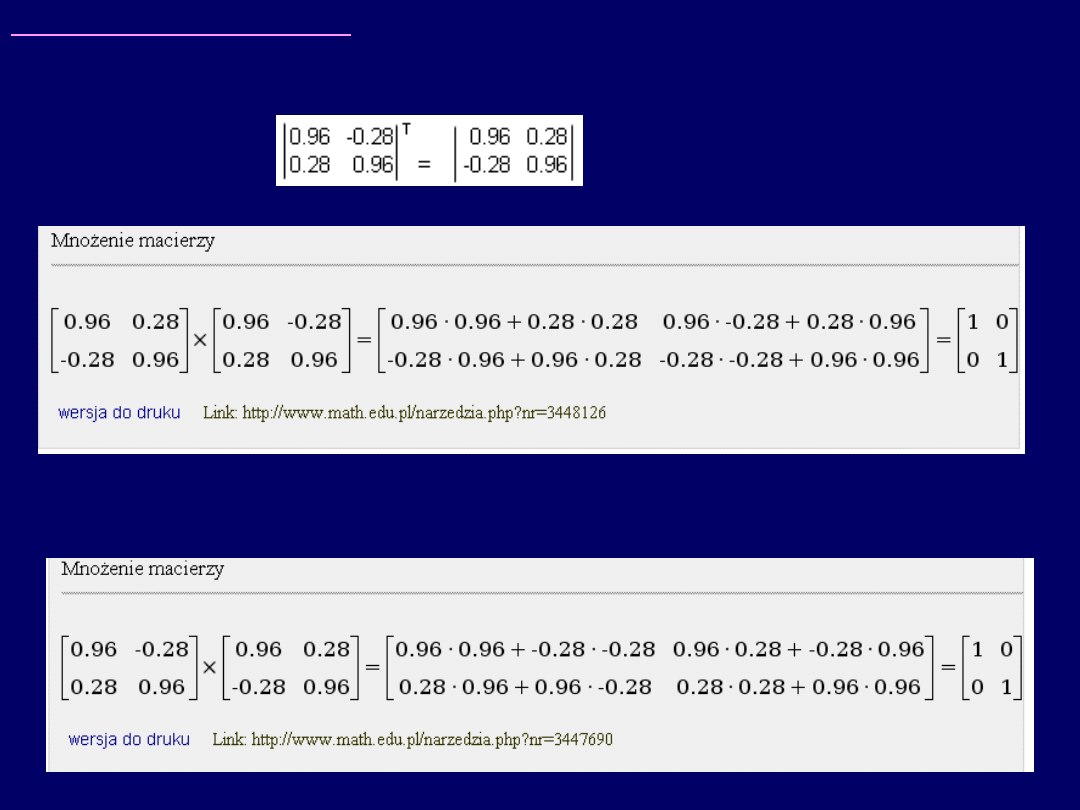
Wskazówki do zadania 6:
Macierz A jest
ortogonalna
, gdy A
T
A = I. W przypadku macierzy z na-szego
zadania:
Po przemnożeniu macierzy transponowa
-nej przez wyjściową, uzyskujemy (zgodnie z
definicją) –
macierz jednostkową (I)
:
Identyczny wynik uzyskujemy, mnożąc macierze w
kolejności odwrotnej
,
czyli A A
T
:
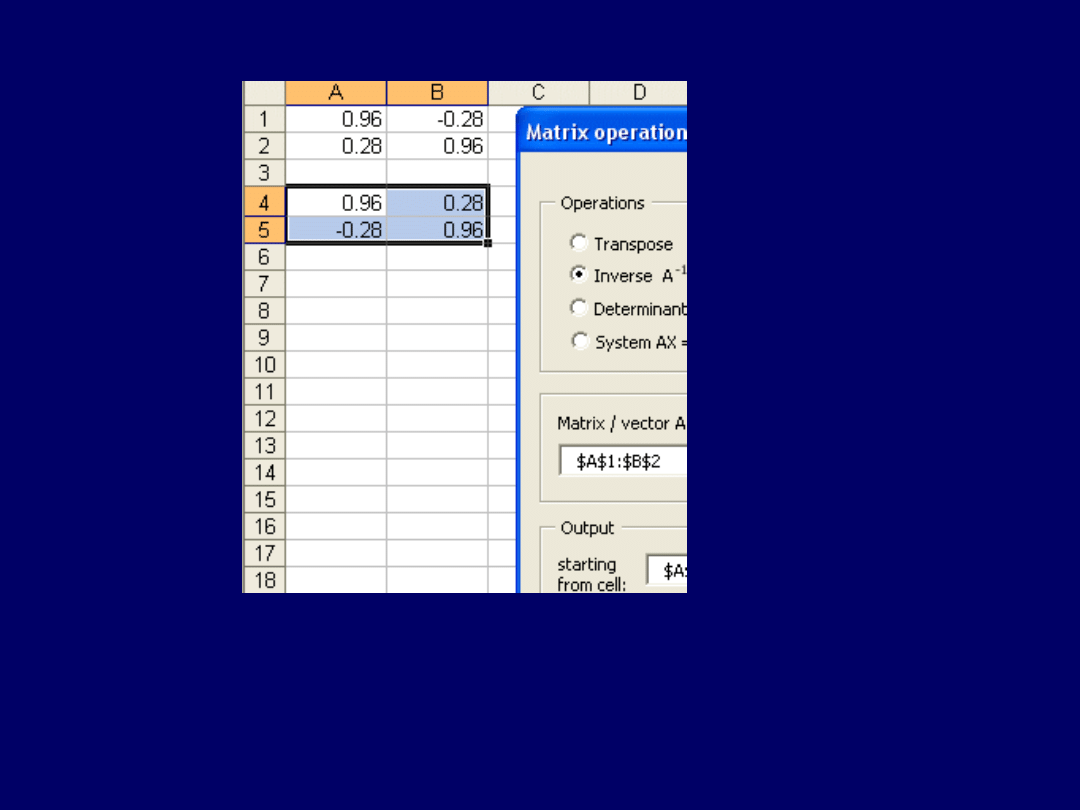
Macierz
odwrotna
rozpatrywanej macierzy ortogonalnej,
jest równa jej
transpozycji
, czyli:
A
T
= A
-1
:
Macierz ortogonalna, która spełnia powyższy warunek, nazywana jest
ortonormalną
.
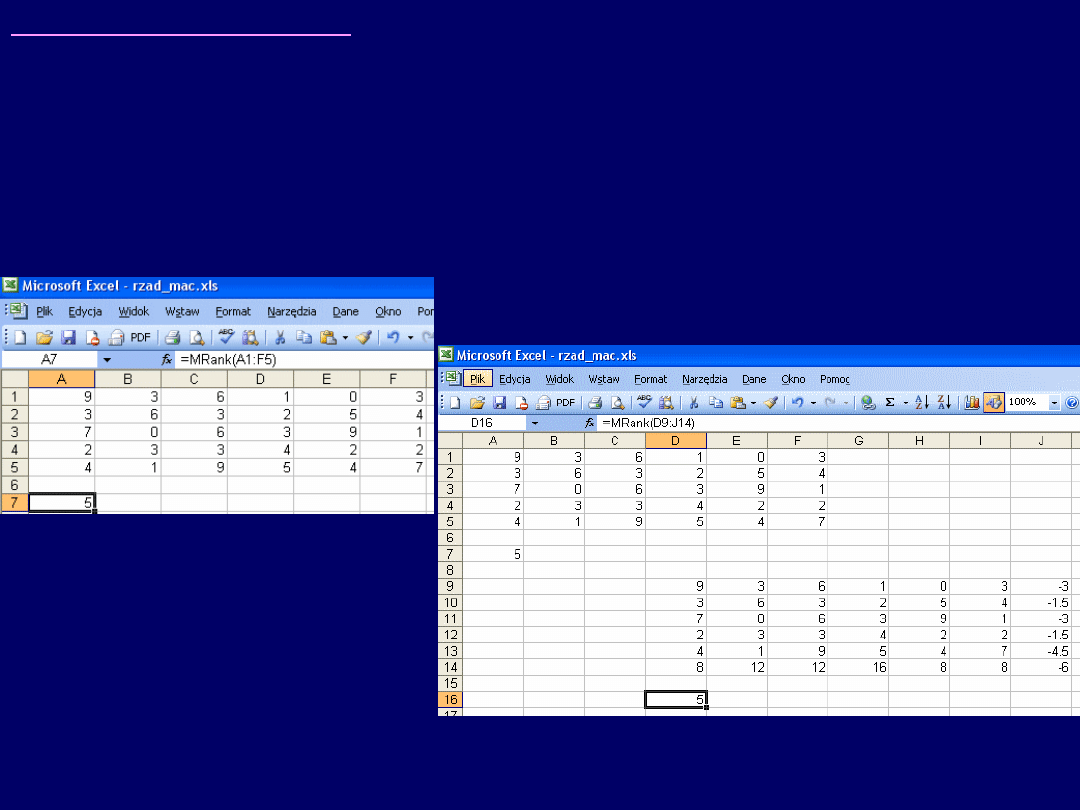
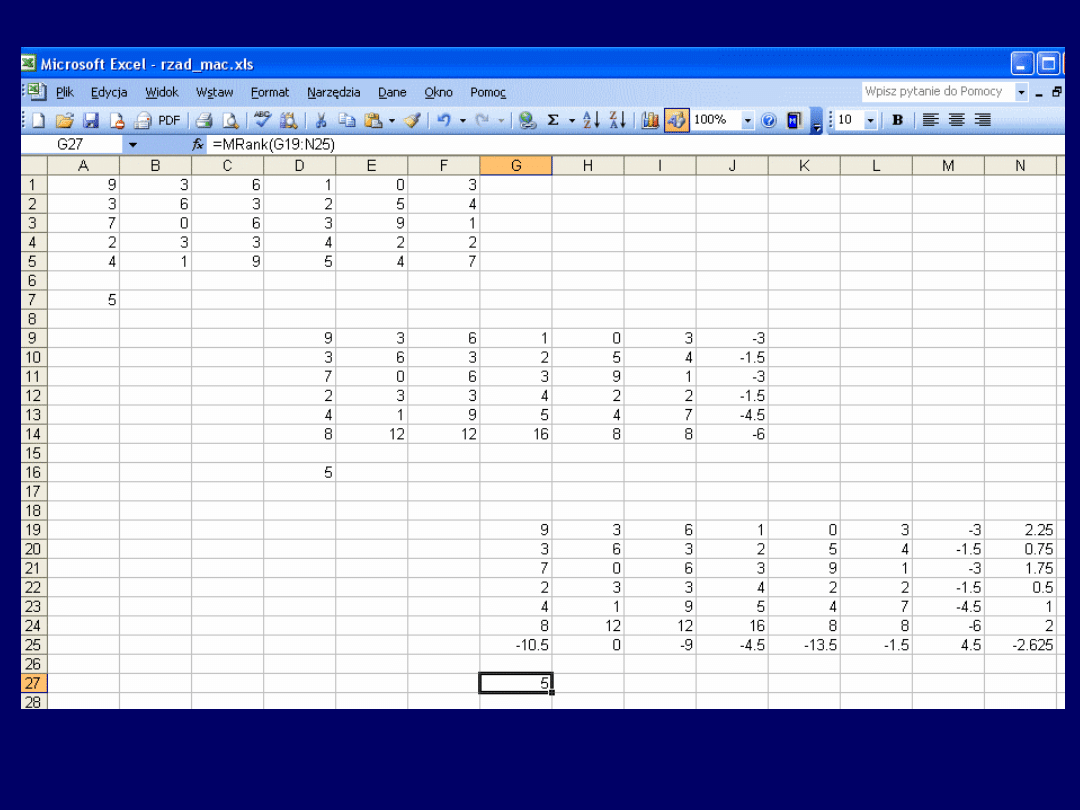
Wskazówki do zadania 7:
Poprzez rząd macierzy rozumiemy
maksymalny wymiar nieosobliwej
podmacierzy
, jaką możemy wyznaczyć w obrębie macierzy badanej. Mając
zainstalowany dodatek „Matrix Functions…”, rząd macierzy możemy łatwo
wyznaczyć w MS Excel za pomocą funkcji „MRank”, którą wprowadzamy
następująco:
„=mrank(k_pocz:k_końc)”
, gdzie:
k_pocz – adres komórki początkowej macierzy, k_końc – adres komórki
końcowej macierzy. Dla pierwszej macierzy z zadania:
Dla drugiej:
Zaś dla trzeciej:
W każdym przypadku rząd badanej macierzy
wynosił 5
.

Wskazuje to, że w pierwszym przypadku cała
macierz
(a ściślej mówiąc – jej
podmacierz kwadratowa: 55)
jest nieosobliwa
, a jej wszystkie wektory
(kolumny i wiersze) są
liniowo niezależne
.
W przypadku drugiej macierzy, ostatnia (VII-ma) kolumna zawie-ra
wyniki przemnożenia liczb występujących w kolumnie III-ciej – przez –0,5,
a ostatni (VI-ty) wiersz – wyniki przemnożenia liczb zawartych w wierszu
IV-tym przez 4. Tak więc wspomniane:
ostatni wiersz i kolumna są liniowo
zależne od innych wierszy/kolumn wewnątrz macierzy
.
Trzecia macierz: obok takiej samej zawartości, jak macierz 2-ga, jej
ostatnia (VIII-ma) kolumna zawiera wyniki przemnożenia kolumny I-szej
przez 0,25, a w ostatnim (VII-mym) wierszu – są wyni-ki przemnożenia
wiersza III-go przez –1,5. Tak więc
liniowo niezależ-na jest tutaj górna
podmacierz 55
– podobnie, jak w przypadku macierzy 1 i 2.
Z powyższych względów
rząd wszystkich trzech badanych macierzy
jest taki sam i wynosi 5
.
Znajomość rzędu macierzy może być przydatna przy
rozwiązywaniu
układów równań liniowych
(zapisanych w formie macierzowej) – a
konkretnie przy wstępnej ocenie, czy dany układ równań jest niesprzeczny
(rozwiązywalny) i czy ma jednoznaczne rozwiązanie.

Dziękuję
za uwagę ;-)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
Wyszukiwarka
Podobne podstrony:
I Frejman, Metodologia badań pedagogicznych - wykład - prof. dr hab. S. Frejman
PEDcw w4s6, aaa VI semestr, PEDcw prof. dr hab. J.Pięta
egzamin prof dr hab Urlich
TEORIA STOSUNKÓW MIĘDZYNARODOWYCH, Uczelnia - notatki, prof. dr hab. Sebastian Wojciechowski
II Frejman, Metodologia badań pedagogicznych - wykład - prof. dr hab. S. Frejman
prof dr hab M Smejda,Harmoniza Nieznany
Prawo Administracyjne prof dr hab J Filipek Opracowanie wykladow
MP projekt, Metodologia badań pedagogicznych - wykład - prof. dr hab. S. Frejman
retoryka i erystyka, prof. dr hab. e. nieznanski
aa kliniczna wyklady, KLINICZ3, prof. dr hab. Jan Tylka - psychologia kliniczna
prof dr hab M Pyziak Szafnicka dr M Wojewoda, Prawo cywilne, skrypt (prawo rzeczowe)
zagadnienia egzaminacyjne, Metodologia badań pedagogicznych - wykład - prof. dr hab. S. Frejman
Propozycja zadan, Metodologia badań pedagogicznych - wykład - prof. dr hab. S. Frejman
MP kolokwium zagadnienia, Metodologia badań pedagogicznych - wykład - prof. dr hab. S. Frejman
czesc III, WSKiZ, Materialoznawstwo w, Materialoznawstwo prof. dr hab. inz Boleslaw Jurkowski [ częś
PODSTAWY ZARZÄ„DZANIA WYKĹ‚ prof dr hab J PYKA
zakazenia w poloznictwie i ginekologi prof dr hab k drews
Rosja a integracja w Europie 10 zz 2, 6 semestr, Rosja a integracja w Europie prof. dr hab. Wiesław
więcej podobnych podstron