
ZAWIESZENIA
ZAWIESZENIA
Drgania
2010
Andrzej Reński

Drgania
Tematyka:
- Modele fizyczne i matematyczne
pojazdu
- Charakterystyki
- Generowanie drgań
- Oddziaływanie drgań na człowieka.
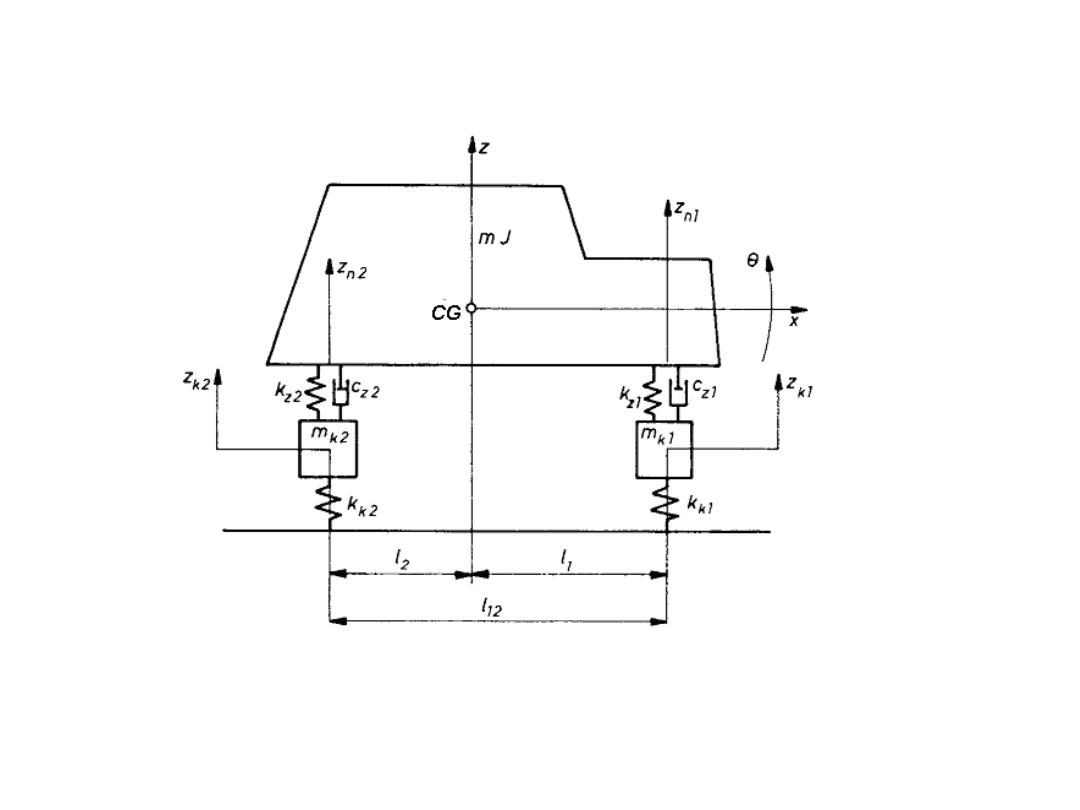
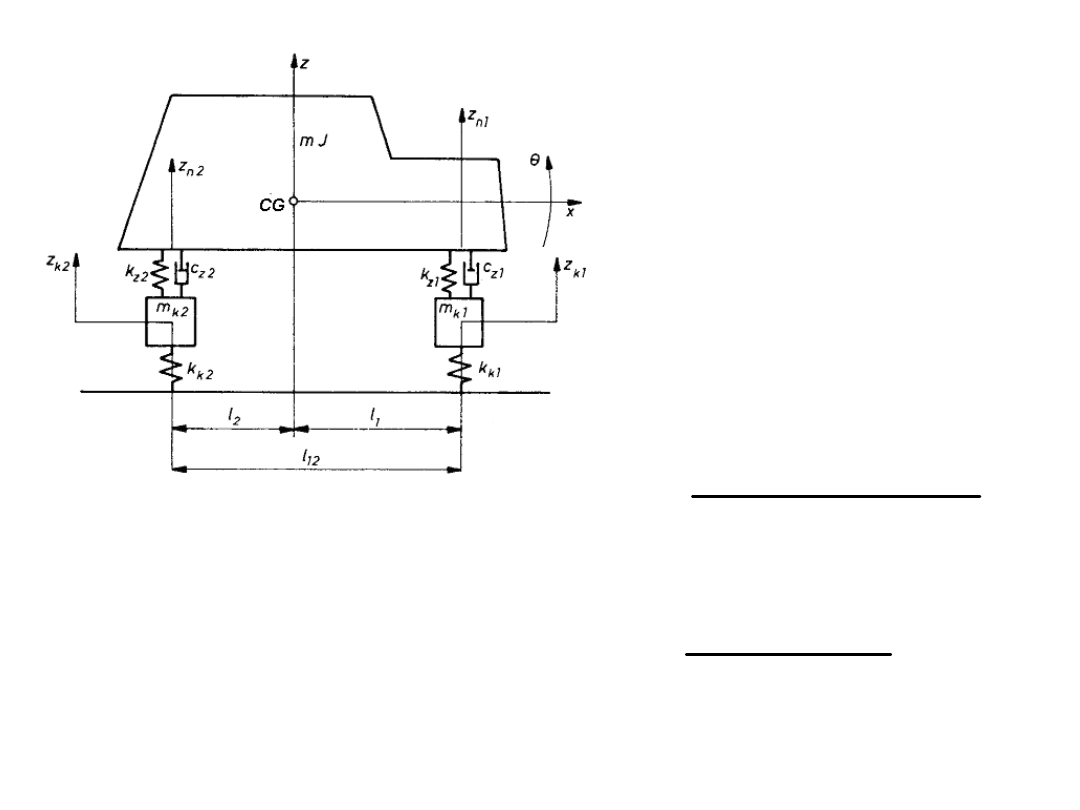
Model fizyczny pojazdu
Model płaski o 4 stopniach swobody
12
1
2
n
2
1
n
l
l
z
l
z
z
12
2
n
1
n
l
z
z
Równanie Lagrange
i
i
i
i
Q
q
V
q
T
q
T
dt
d
T – energia kinetyczna,
V – energia potencjalna,
q
i
– współrzędna uogólniona,
Q
i
– siła uogólniona (w przypadku drgań
swobodnych Q
i
= 0)
Energia kinetyczna układu:
2
2
k
2
k
2
1
k
1
k
2
2
z
m
2
1
z
m
2
1
J
2
1
z
m
2
1
T
Energia potencjalna:
2
2
k
2
n
2
z
2
1
k
1
n
1
z
2
2
k
2
k
2
1
k
1
k
z
z
k
2
1
z
z
k
2
1
z
k
2
1
z
k
2
1
V
lub
2
2
k
2
k
2
1
k
1
k
2
12
2
n
1
n
2
12
1
2
n
2
1
n
z
m
2
1
z
m
2
1
l
z
z
J
2
1
l
l
z
l
z
m
2
1
T
0
z
k
z
k
z
l
J
l
l
m
z
l
J
l
m
1
k
1
z
1
n
1
z
2
n
2
12
2
1
1
n
2
12
2
2
0
z
k
k
z
k
z
m
1
k
1
k
1
z
1
n
1
z
1
k
1
k
0
z
k
z
k
z
l
J
l
m
z
l
J
l
l
m
2
k
2
z
2
n
2
z
2
n
2
12
2
1
1
n
2
12
2
1
0
z
k
k
z
k
z
m
2
k
2
k
2
z
2
n
2
z
2
k
2
k
Jesli:
to:
0
1
1
1
1
1
2
12
2
2
k
z
n
z
n
z
k
z
k
z
l
J
l
m
0
2
2
2
2
2
2
12
2
1
k
z
n
z
n
z
k
z
k
z
l
J
l
m
0
z
k
k
z
k
z
m
1
k
1
k
1
z
1
n
1
z
1
k
1
k
0
z
k
k
z
k
z
m
2
k
2
k
2
z
2
n
2
z
2
k
2
k
m l
1
l
2
– J = 0
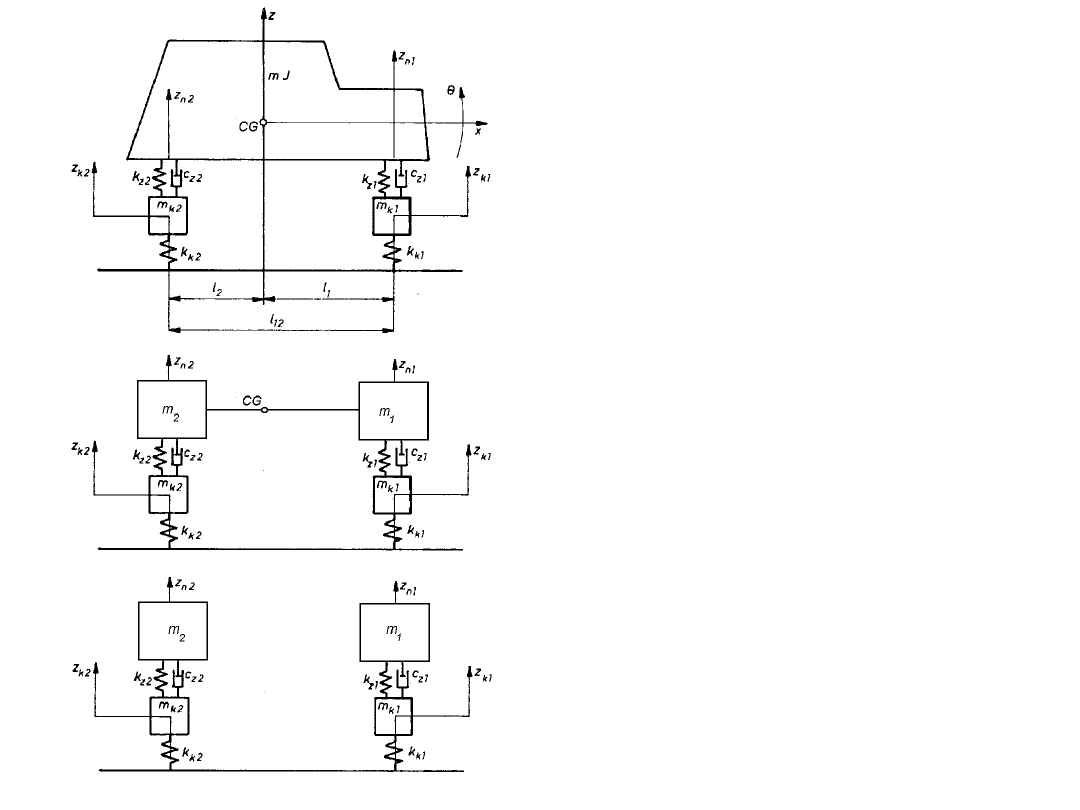
Podział modelu pojazdu o
4 stopniach swobody na 2
modele o 2 stopniach
swobody
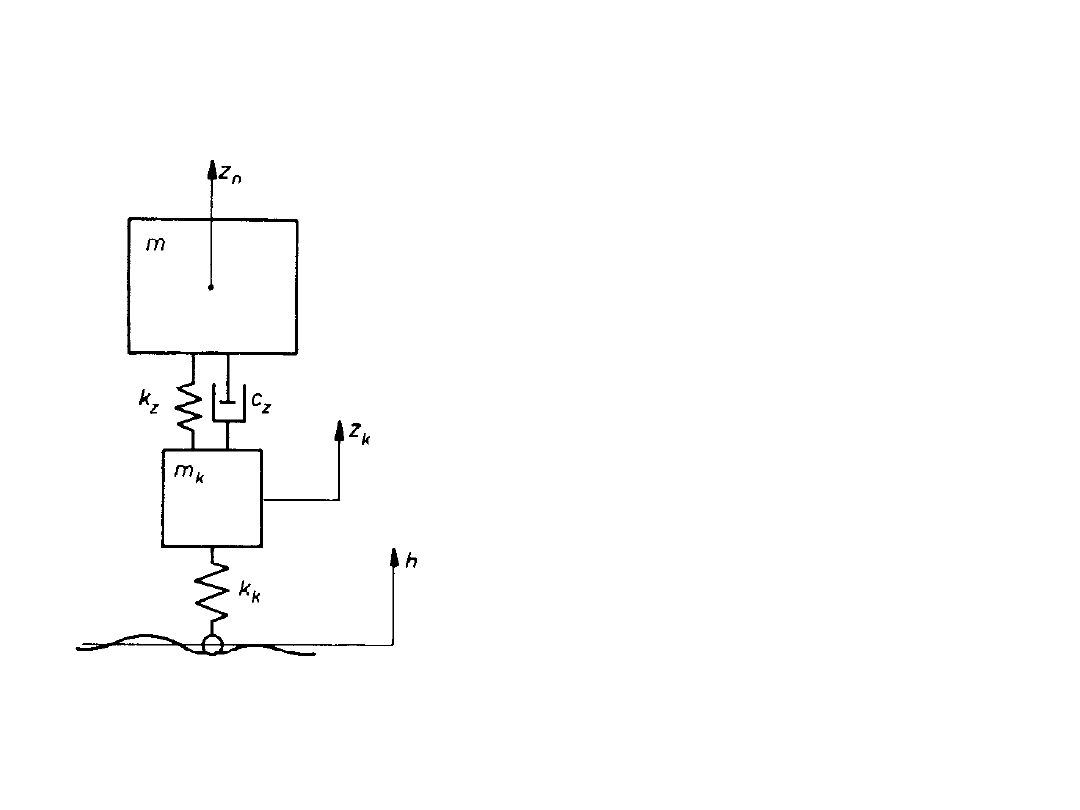
DRGANIA WYMUSZONE
Model o 2 stopniach swobody
reprezentujący przednią lub
tylną część samochodu lub
jedną stronę jego przedniej
lub tylnej części (tzw. model
ćwiartki pojazdu)
Wymuszenie kinematyczne nierównościami drogi

Równania ruchu
0
)
z
z
(
k
)
z
z
(
c
z
m
k
n
z
k
n
z
n
)
z
h
(
k
)
z
z
(
k
)
z
z
(
c
z
m
k
k
k
n
z
k
n
z
k
k
Układ równań ruchu:
0
)
z
z
(
k
)
z
z
(
c
z
m
k
n
z
k
n
z
n
)
z
h
(
k
)
z
z
(
k
)
z
z
(
c
z
m
k
k
k
n
z
k
n
z
k
k
Po uporządkowaniu względem niewiadomych:
0
z
k
z
c
z
k
z
c
z
m
k
z
k
z
n
z
n
z
n
h
k
z
)
k
k
(
z
c
z
m
z
k
z
c
k
k
k
z
k
z
k
k
n
z
n
z
Transformacja Fouriera
d
e
)
(
f
~
2
1
)
t
(
f
t
i
)
ω
(
f
~
dt
e
)
t
(
f
)
(
f
~
t
i
jest transformatą Fouriera
0
z
k
z
c
z
k
z
c
z
m
k
z
k
z
n
z
n
z
n
h
k
z
)
k
k
(
z
c
z
m
z
k
z
c
k
k
k
z
k
z
k
k
n
z
n
z
po transformacji Fouriera:
0
)
ω
c
i
k
(
z~
)
ω
c
i
k
ω
m
(
z~
z
z
k
z
z
2
n
k
z
k
z
2
k
k
z
z
n
k
h
~
)
ω
c
i
k
k
ω
m
(
z~
)
ω
c
i
k
(
z~
Układ równań

Transmitancja
h
~
)
c
i
k
(
)
c
i
k
k
m
(
)
c
i
k
m
(
)
c
i
k
(
k
z~
2
z
z
z
k
z
2
k
z
z
2
z
z
k
n
h
~
z~
)
ω
i
(
H
n
zn
Transmitancja dla bryły nadwozia względem
nierówności drogi
Transmitancja
h
~
)
c
i
k
(
)
c
i
k
k
m
(
)
c
i
k
m
(
)
c
i
k
(
k
z~
2
z
z
z
k
z
2
k
z
z
2
z
z
k
n
h
~
z~
)
ω
i
(
H
n
zn
Transmitancja dla bryły nadwozia względem
nierówności drogi
2
z
z
z
k
z
2
k
z
z
2
z
z
k
zn
)
ω
c
i
k
(
)
ω
c
i
k
k
ω
m
(
)
ω
c
i
k
ω
m
(
)
ω
c
i
k
(
k
)
ω
i
(
H
2
z
z
z
k
z
2
k
z
z
2
z
z
k
zn
)
ω
c
i
k
(
)
ω
c
i
k
k
ω
m
(
)
ω
c
i
k
ω
m
(
)
ω
c
i
k
(
k
)
ω
i
(
H
Transmitancja:
ω
i
H
h
z
z
0
0
n
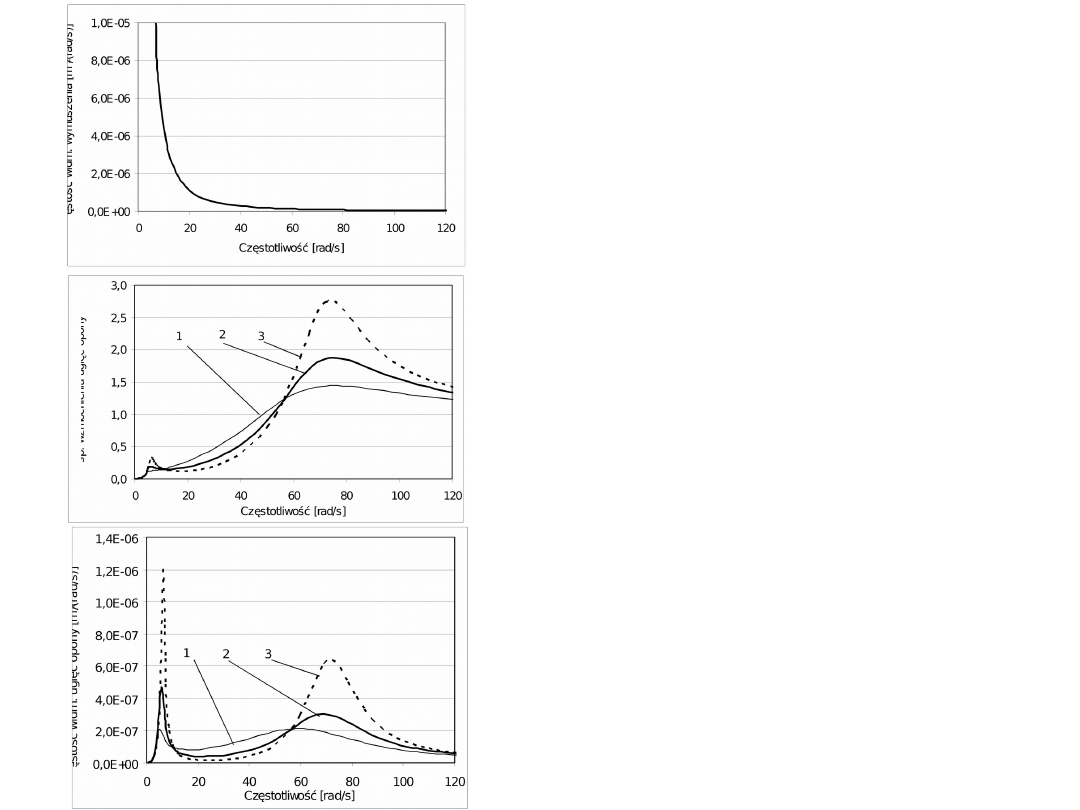
Współczynnik wzmocnienia – stosunek amplitud
odpowiedzi i wymuszenia jako funkcja
częstotliwości wymuszenia lub f
0
100
200
300
400
500
600
0
20
40
60
80
100
120
Angular velocity [rad/s]
B
od
y
ac
ce
le
ra
tio
n
ga
in
[
s
-2
]
1
2
3
0,0
0,5
1,0
1,5
2,0
2,5
3,0
0
20
40
60
80
100
120
Angular velocity [rad/s]
Ti
re
d
ef
ec
tio
n
ga
in
1
2
3
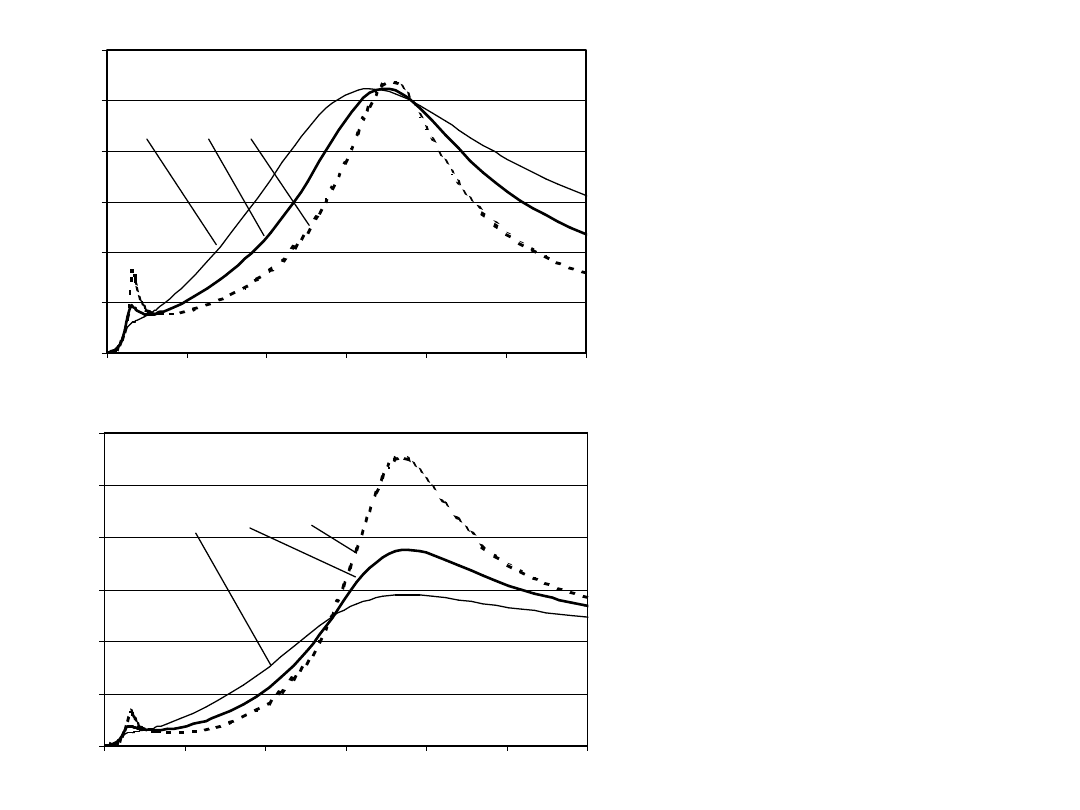
Wykresy
współczynnika
wzmocnienia dla
przyśpieszeń
nadwozia i ugięć
opony dla trzech
różnych wartości
bezwymiarowego
współczynnika
tłumienia: 1 > 2 >
3
)
i
(
H
)
i
(
H
zn
2
n
z
0
0
dyn
k
zk
h
z
)
ω
i
(
H
Współczynnik wzmocnienia przyśpieszeń
pionowych:
Współczynnik wzmocnienia ugięć opony:
0
0
dyn
k
zk
h
z
)
ω
i
(
H
F
k dyn
= k
k
z
k
dyn
Współczynnik wzmocnienia ugięć opony:
Jest istotny przy obliczaniu siły pionowej
pomiędzy oponą i nawierzchnią F
k
dyn :
m
k
k
k
k
ω
k
z
k
z
n
0
k
z
k
k
0
m
k
k
ω
m
k
ω
z
n
0
lub
Częstotliwość drgań własnych nietłumionych
nadwozia
Częstotliwość drgań własnych nietłumionych
koła:
n
0
z
m
2
c
Bezwymiarowy współczynnik tłumienia:
)
x
(
h
Ω
d
d
ΔΩ
)
x
(
h
Δ
lim
)
Ω
(
G
2
2
L
h
Gęstość widmowa nierówności drogi:
gdzie:
L – długość odcinka pomiarowego
Ω
0
= 2π/L – podstawowa częstotliwość kołowa
nierówności drogi [rad/m]
L
n
– długośc fali nierówności n-tej składowej
harmonicznej
Ω = 2π/L
n
- częstotliwość kołowa n-tej składowej
harmonicznej nierówności drogi [rad/m]. Ω jest
wielokrotnością częstotliwości podstawowej Ω
0
<h
2
(x)> - wartość średnia kwadratowa wysokości
nierówności drogi h(x) mierzonej wzdłuż drogi x
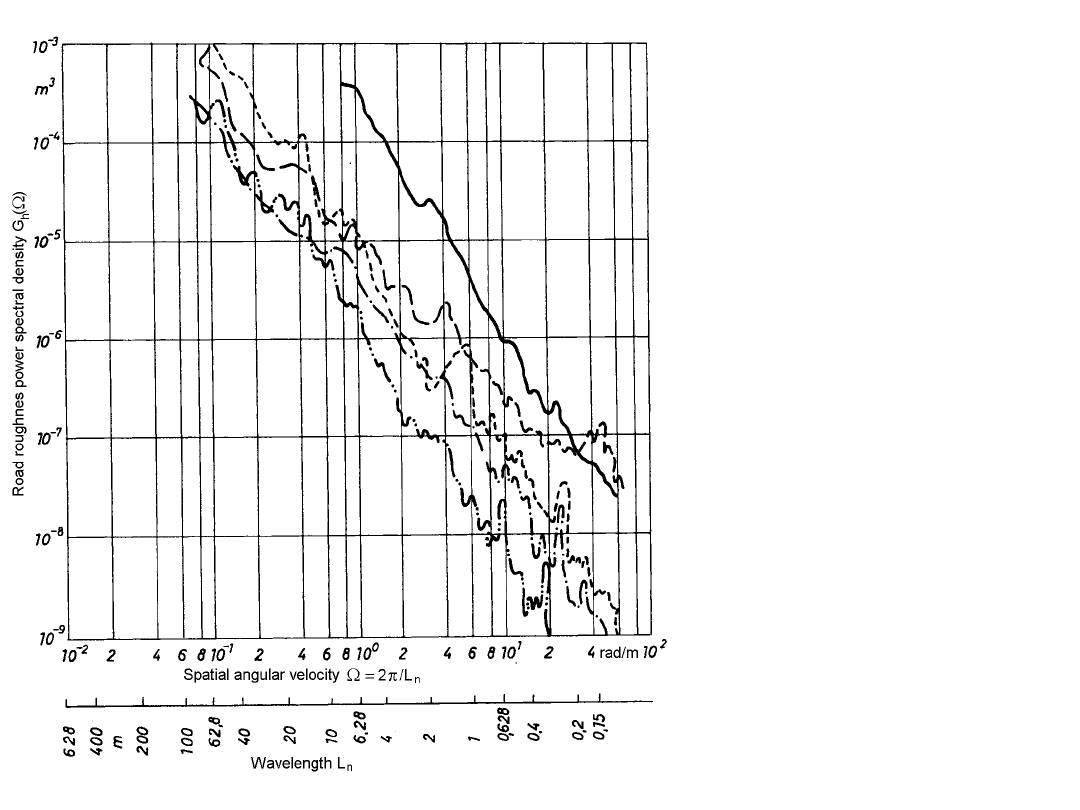
Gęstości widmowe
nierówności dróg o
różnych
nawierzchniach:
asfalt
bardzo dobrej jakości,
bardzo dobry beton,
- - - - - - - - -
szuter,
bruk,
droga
nieutwardzona
w
ref
ref
h
h
Ω
Ω
)
Ω
(
G
)
Ω
(
G
Linearyzacja wykresu gęstości widmowej
nierówności drogi
gdzie:
Ω
ref
- czestotliwość
kołowa odniesienia, zwykle Ω
ref
= 1
rad/m
G
h
(Ω
ref
) – wartość gęstości widmowej dla częstotliwości
odniesienia
Wartości G
h
(Ω
ref
) oraz w dla różnych dróg w [Mitschke]
Linearyzacja wykresu gęstości widmowej
nierówności drogi
Wartości parametrów opisujących widmo
nierówności drogi; na podstawie [Mitscke
2]
Rodzaj drogi
Stan nawierzchni
ocena
subiektywna
Wartości średnie dla Ω
ref
= 1 m
-1
w
Φ
h
(Ω
ref
) [cm
3
]
Cementobeton
bardzo dobry
dobry
średni
zły
2,29
1,97
1,97
1,72
0,6
4,5
6,7
56
Asfaltobeton
bardzo dobry
dobry
średni
2,20
2,18
2,18
1,3
6
22
Szuter
dobry
średni
zły
bardzo zły
2,26
2,26
2,15
2,15
9
21
43
158
Bruk
dobry
średni
zły
bardzo zły
1,75
1,75
1,81
1,81
14
23
36
323
Droga
nieutwardzona
dobry
średni
zły
bardzo zły
2,25
2,25
2,14
2,14
32
155
602
16300
w
ref
ref
h
h
Ω
Ω
)
Ω
(
G
)
Ω
(
G
ω = v Ω
)
Ω
(
G
v
1
)
ω
(
G
h
h
)
ω
(
G
)
ω
i
(
H
)
ω
(
G
h
2
z
z
Dla danej prędkości jazdy v
Gęstość widmowa przyśpieszeń pionowych
nadwozia wynosi
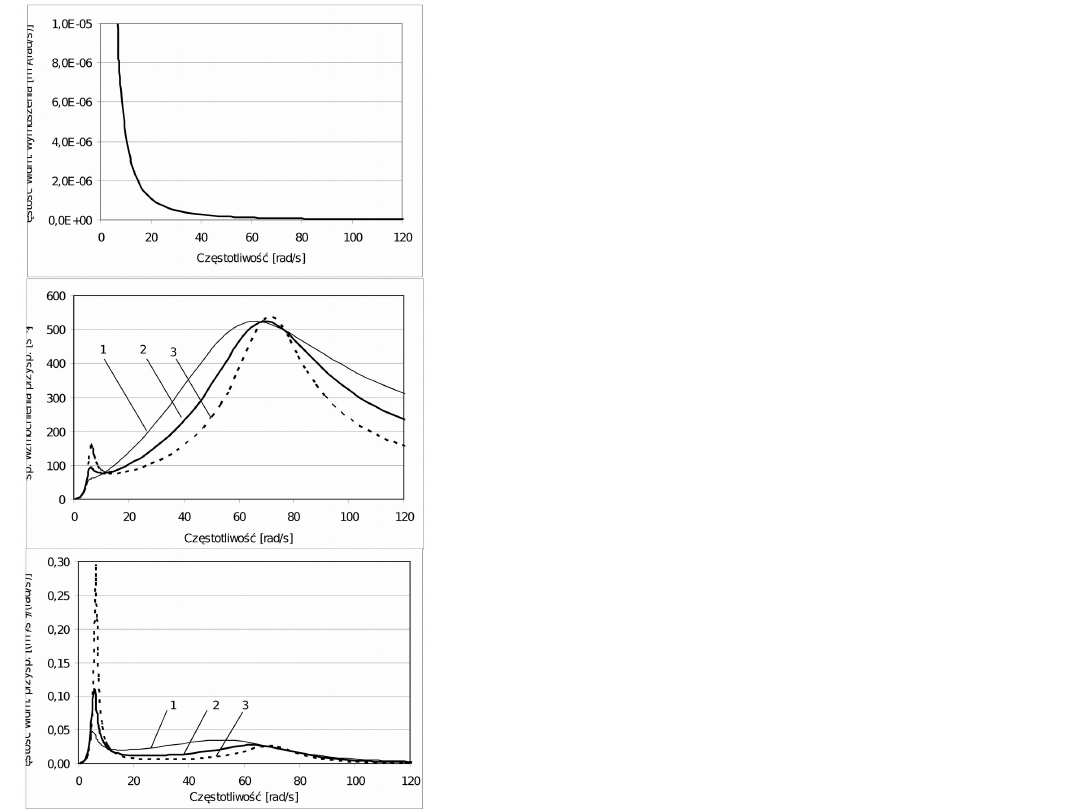
Obliczanie widma gęstości
widmowej przyśpieszeń
pionowych nadwozia z
widma gęstości widmowej
nierówności drogi i
charakterystyki
amplitudowo-
częstotliwościowej dla
przyśpieszeń nadwozia dla
różnych wartości
bezwymiarowego
współczynnika tłumienia
1
(linia 1) >
2
(linia 2) >
3
(linia 3)
Obliczanie gęstości
widmowej ugięć
dynamicznych opon z widma
gęstości widmowej
nierówności drogi i
charakterystyki
amplitudowo-
częstotliwościowej dla ugięć
opon dla różnych wartości
bezwymiarowego
współczynnika tłumienia
1
(linia 1) >
2
(linia 2) >
3
(linia 3)
2
1
d
)
(
G
z
2
z
2
z
z
sk
z
Wariancja pionowych przyśpieszeń
nadwozia:
Wartość średnia kwadratowa (RMS = root-mean-
square value) przyśpieszeń nadwozia jest równa
pierwiastkowi kwadratowemu z wariancji, a także
równa odchyleniu standardowemu i wartości
skutecznej (dla średniej wartości przyśpieszenia =
0)
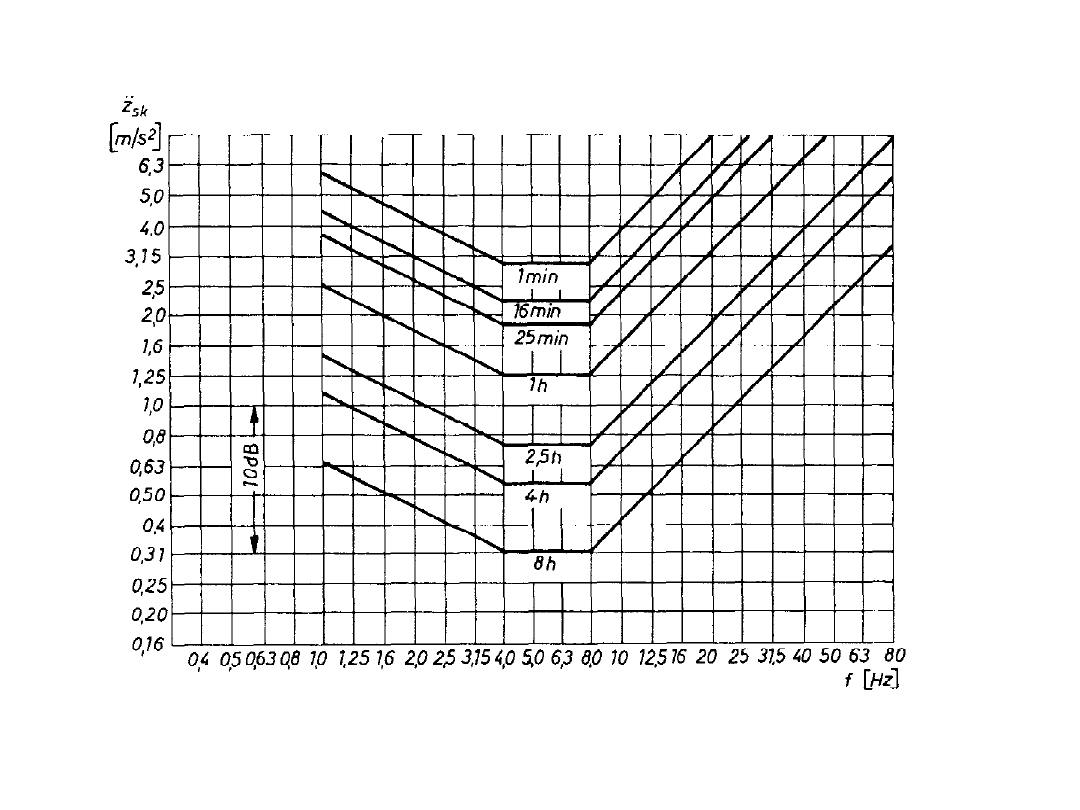
Oddziaływanie drgań na człowieka
Linie jednakowego komfortu wg normy ISO 2631. Dopuszczalne czasy
ekspozycji, kryterium średniej szkodliwości.
8 h
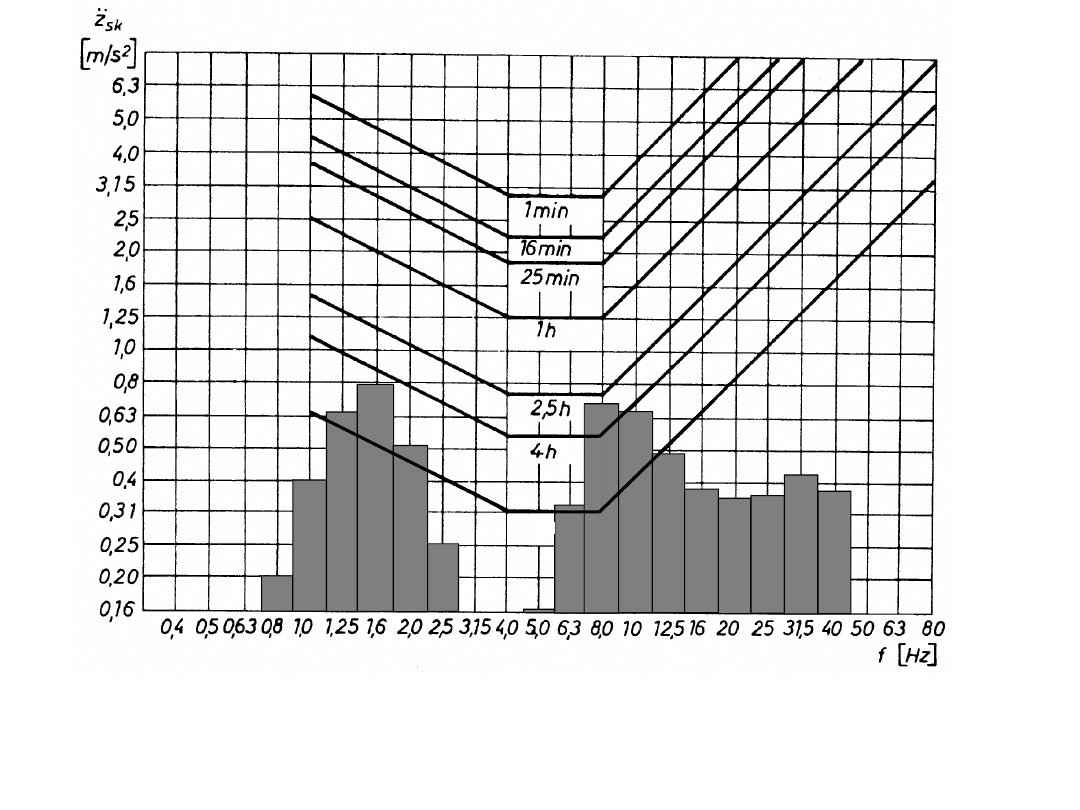
Porównanie tercjowego (szerokość pasma 1/3 oktawy) widma
przyśpieszeń pionowych nadwozia z liniami dopuszczalnych
czasów ekspozycji wg normy ISO 2631 dla średniego stopnia
szkodliwości
movement resistance force
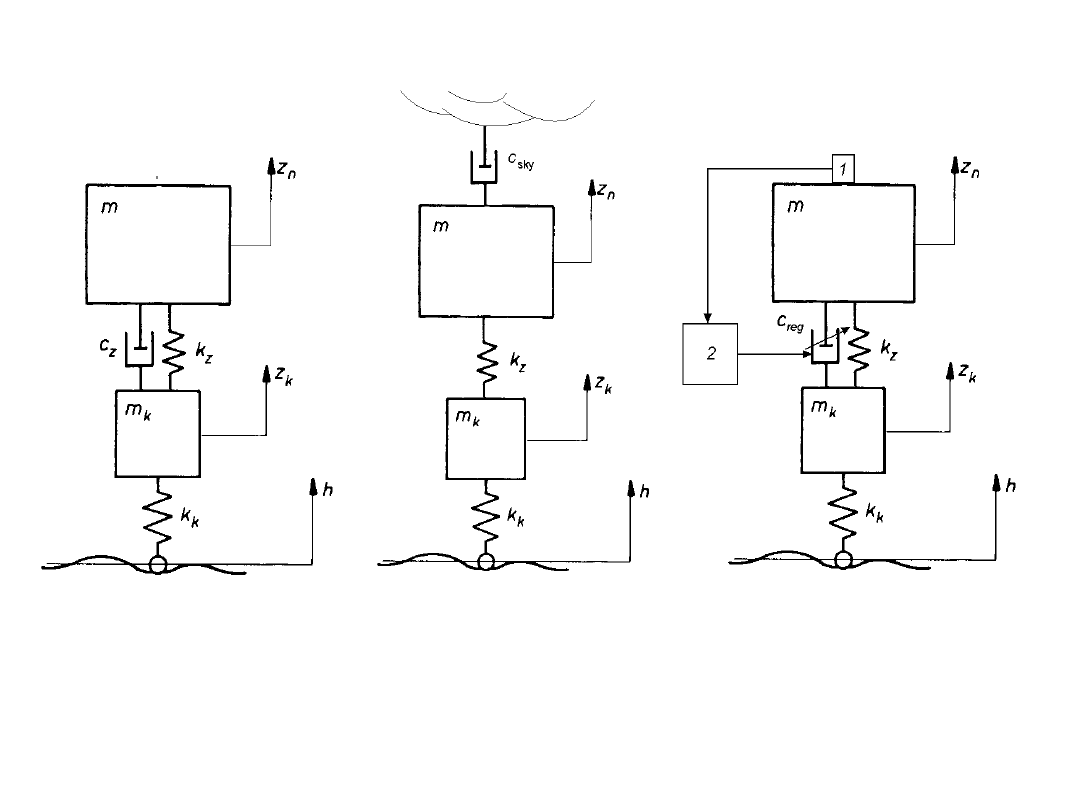
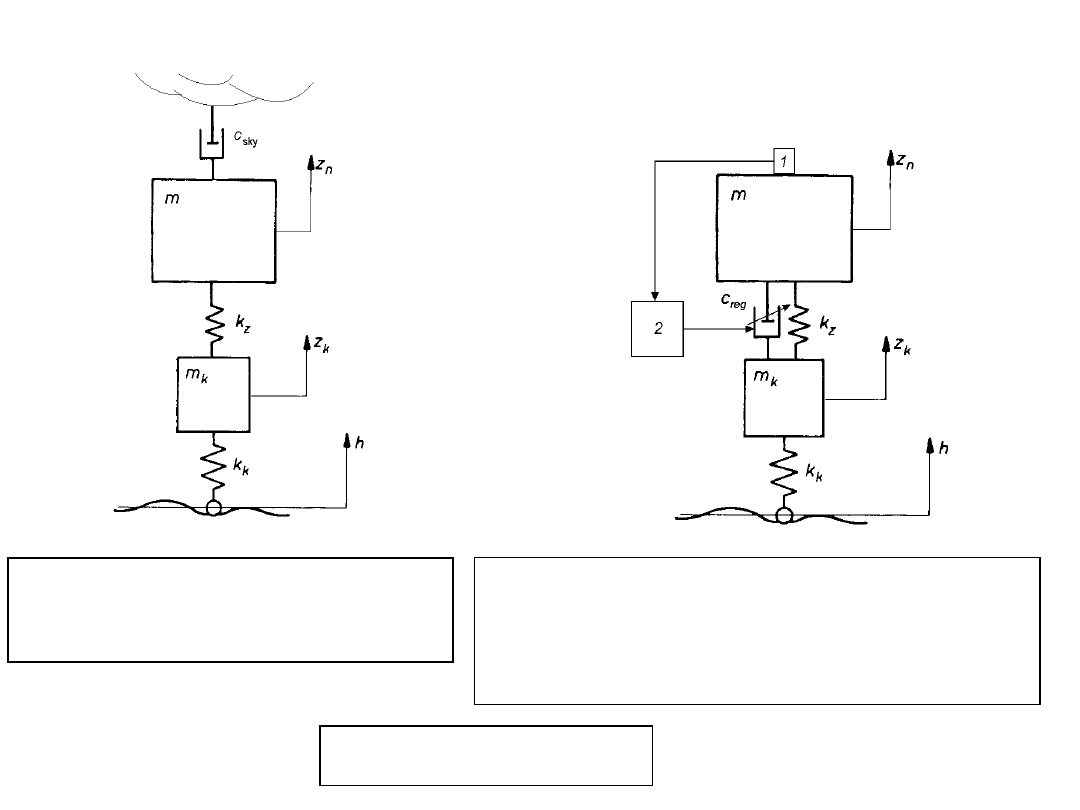
ZAWIESZENIE AKTYWNE - sky-hook control
Sterowanie tłumieniem zawieszenia wg idei „sky-hook”:
schemat zawieszenia pasywnego (a), teoretyczne zawieszenie
„sky-hook” (b) i jego praktyczna realizacja (c). Oznaczenia: 1 –
czujnik przyśpieszeń, 2 – sterownik, c
reg
– amortyzator o
zmiennym tłumieniu
a
b
c
)
z
z
(
c
z
c
k
n
reg
n
sky
ZAWIESZENIE AKTYWNE - sky-hook control
0
)
z
z
(
k
z
c
z
m
k
n
z
n
sky
n
0
)
h
z
(
k
)
z
z
(
k
z
m
k
k
n
k
z
k
k
0
)
z
z
(
k
)
z
z
(
c
z
m
k
n
z
k
n
reg
n
0
)
h
z
(
k
)
z
z
(
k
)
z
z
(
c
z
m
k
k
n
k
z
n
k
reg
k
k
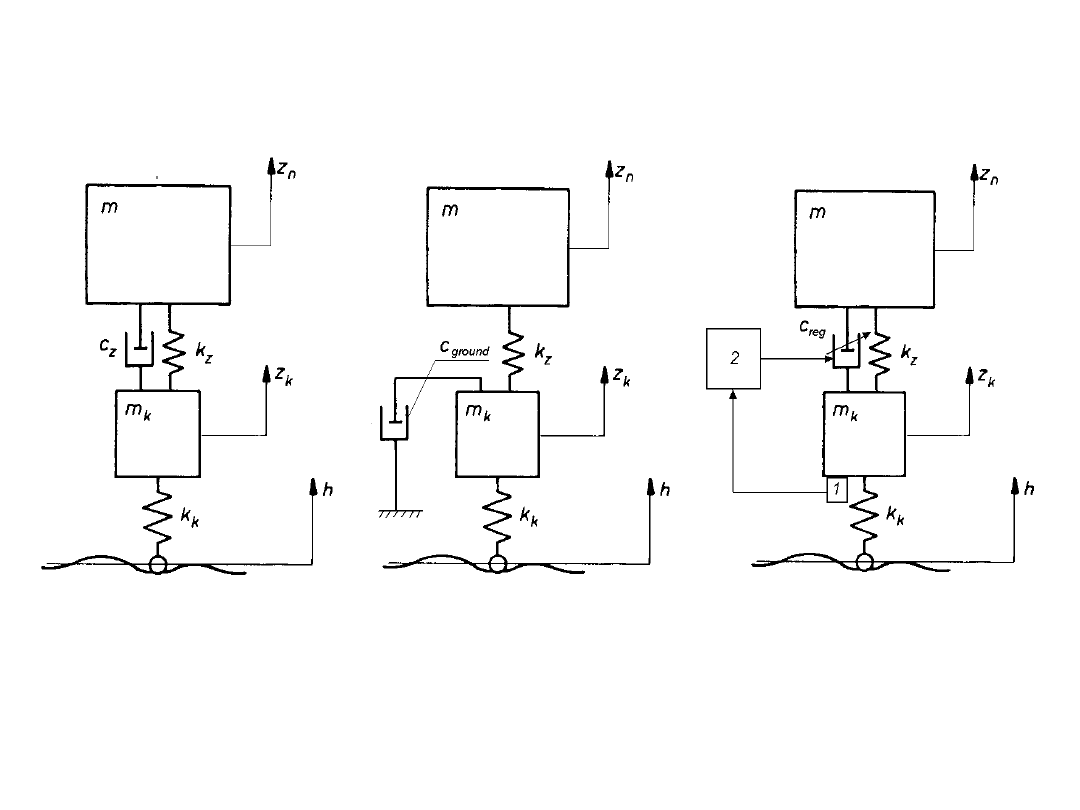
ZAWIESZENIE AKTYWNE - ground-hook control
Sterowanie tłumieniem zawieszenia wg idei „ground-hook”:
schemat zawieszenia pasywnego (a), teoretyczne zawieszenie
„ground-hook” (b) i jego praktyczna realizacja (c).
Oznaczenia: 1 – czujnik przyśpieszeń, 2 – sterownik, c
reg
–
amortyzator o zmiennym tłumieniu
a
b
c
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
Wyszukiwarka
Podobne podstrony:
pojazdy drgania
Drgania i hałas w pojazdach drogowych
Pytania z odpowiedziami drgania pojazdu, SIMR PW, V semestr zaoczne, lab pojazdow, sprawko
Elektryczne pojazdy trakcyjne
pojazdy ekologiczne(1)
Hałas i drgania mechaniczne
drgania mechaniczne
Wykład 7 Drgania sieci krystalicznej
Drgania
drgania2(1)
mechanik operator pojazdow i maszyn rolniczych 723[03] z2 04 n
mechanik pojazdow samochodowych 723[04] z1 04 n
mechanik operator pojazdow i maszyn rolniczych 723[03] o1 05 u
jak zdekodowac informacje zawarte w numerze identyfikacyjnym nadwozia lub ramy pojazdu
Drgania ukladu o jednym stopniu swobody v2011
mechanik operator pojazdow i maszyn rolniczych 723[03] z3 02 n
więcej podobnych podstron