Współczesne
tachymetry
elektroniczne.
Jest to instrument geodezyjny powstały w
wyniku połączenia teodolitu elektronicznego z
dalmierzem elektrooptycznym i z urządzeniem do
automatycznego rejestrowania i (lub)
przetwarzania danych w jeden interaktywny system
pomiarowo-obliczeniowy. Stworzyło to możliwości
automatyzacji procesu jednoczesnego pozyskiwania
danych (kątów i odległości) oraz ich
automatycznego przetwarzania „on line” lub „off
line” na wspołrzędne x,y,z punktu obserwowanego.
Tachymetr elektroniczny:
Ze względu na tradycyjne (i
stosowane nadal) terminy: tachymetria,
tachymetr, tachymetryczny, którymi
określa się biegunową metodę pomiaru
położenia, i używany w tejże metodzie
instrument geodezyjny (np. tachymetr
nitkowy, dwu obrazowy,
autoredukcyjny) omawiane tu systemy
pomiarowe zwane są tachymetrami
elektronicznymi.
Sposoby łączenia teodolitów
Sposoby łączenia teodolitów
elektronicznych z dalmierzami
elektronicznych z dalmierzami
elektrooptycznymi:
elektrooptycznymi:
1.Scalenie układu dalmierczego z układem kątomierczym w
jednolity system pomiarowy o wspólnej obudowie i wielu wspólnych
elementach (np. wspólna luneta, mikroprocesor, fazomierz,
klawiatura, rejestrator) w skład którego wchodzi także zewnętrzny
komputer. Tego systemy zwane są tachymetrami zintegrowanymi.
2.Połączenie odrębnego dalmierza nasadkowego (moduł drugi) z
teodolitem optycznym lub elektronicznym, który stanowi bazę
(moduł pierwszy) tachymetru zwanego modularnym. Z systemem
tym łączony jest zewnętrzny rejestrator, końcówka danych (data
terminal) lub komputery.
układem dalmierza;
metodą elektronicznego pomiaru kątów;
stopniem automatyzacji procesów pomiarowych;
sposobem i zakresem rejestracji oraz
przetwarzania danych;
oprogramowaniem, dokładnością i zasięgiem
przestrzennym.
Zintegrowane tachymetry elektroniczne różnych
Zintegrowane tachymetry elektroniczne różnych
firm, a często nawet poszczególne modele tej samej
firm, a często nawet poszczególne modele tej samej
firmy, różnią się między sobą poza wyglądem
firmy, różnią się między sobą poza wyglądem
zewnętrznym i odmienną mechaniczno-optyczną
zewnętrznym i odmienną mechaniczno-optyczną
konstrukcją głównie:
konstrukcją głównie:
W nowszych tachymetrach zintegrowanych
stosowane są tylko fazowe dalmierze elektrooptyczne
pracujące wyłącznie na podczerwieni generowanej
przez diodę laserową lub luminiscencyjną Ga As z
modulacją wewnętrzną. Pomiar przesunięcia fazowego
odbywa się tam - na obniżonej częstotliwości wzorcowej
(różnicowej) - metodą cyfrową.
Pomiar odległości D można wykonywać w trybie
stacjonarnym i w trybie „tracking”. Standardowy zasięg
dalmierza dochodzi do 6 krn.
W układzie kątomierczym stosowana jest jedna z metod
elektronicznego pomiaru kąta:
• kodowa;
•Impulsowa;
•dynamiczna, przy czym w instrumentach różnych firm dokładną
interpolację odczytów realizuje się z reguły odmiennymi sposobami.
W nowszych tachymetrach stosowana jest najczęściej metoda
dynamiczna pomiaru kątów. Oczywiście zawsze istnieje możliwość
orientowania kręgu poziomego względem ustalonego kąta
kierunkowego (azymutu). Wpływ ekscentryczności kręgu poziomego
H i kręgu pionowego V eliminowany jest przez automatyczne
uśrednienie odczytów z miejsc przeciwległych. Dzięki temu dla
tachymetrii zupełnie wystarcza wykonywać pomiary obydwóch kątów,
poziomego i pionowego, w jednym tylko położeniu lunety, co znacznie
skraca czas wykonania obserwacji polowych. W instrumentach tych
realizowana jest także automatyczna kompensacja wpływu ich
niedokładnego spoziomowania na kąt pionowy.
Procesy pomiaru kątów i odległości, łącznie z
rozwiązywaniem wieloznaczności, sumowaniem
odczytów zgrubnych i dokładnych, wprowadzaniem
poprawek kompensujących, wyświetlaniem i
transmisją danych pomiarowych, sterowane są z
centralnego mikroprocesora, który kontroluje także
prawidłowość funkcjonowania przyrządu.
Współczesne modele tachymetru wyposażone są z
reguły w klawiaturę zintegrowaną z instrumentem, za
pomocą której wprowadza się do niego dane numeryczne
lub alfanumeryczne i uruchamia różne funkcje związane z
realizacją konkretnego programu lub całych pakietów
programów.
Wyświetlanie (display) danych alfanumerycznych
odbywa się w sposób automatyczny (wyniki pomiarów)
albo po naciśnięciu odpowiedniego klawisza. Do tego celu
stosowane są wyświetlacze ciekłokrystaliczne (LCD) lub
rzadziej diody świetlne (LED).
Oprogramowanie tachymetrów elektronicznych (software)
obejmuje zwykle zespół programów standardowych na pomiary i
proste przeliczenia ich wyników oraz pakiet programów specjalnych,
zwykle fakultatywnych, których odpowiednia kombinacja pozwala
rozwiązywać wprost w terenie różne złożone zadania geodezyjne.
Przykładowe operacje :
•pomiar odległości i kątów;
•kompensacja wpływu nachylenia osi pionowej tachymetru;
•uwzględnianie w pomierzonej odległości aktualnego
współczynnika załamania;
•obliczanie odległości poziomej;
•obliczanie przyrostu wysokości na pomierzonej odległości;
•redukcja zmierzonej odległości na poziom morza i na
powierzchnię odwzorowania;
•obliczenie błędów średnich pomiaru odległości i kątów (przy
wielu nastawieniach lunety na cel);
•obliczanie przyrostów współrzędnych x,y,z.
Wspomniane wyżej oprogramowania użytkownik może łatwo
zmodyfikować, czyniąc je przydatniejszymi dla własnych celów.
Natomiast najnowsze tachymetry dysponują całym menu akcji
możliwych do wykonania przez dany system. Menu takie obejmuje
między innymi szereg instrukcji i propozycji odnośnie do wykonywania
działań niezbędnych dla rozwiązania konkretnego problemu
technicznego. W ten sposób system sam podpowiada niejako, a nawet
zadaje użytkownikowi pytania, co można lub co należy dalej robić.
Usprawnia to dalece samodzielne rozwiązywanie nawet bardzo
złożonych zadań pomiarowo-obliczeniowych.
Dzięki pełnej automatyzacji procesów pomiarowych
sługa nowoczesnych tachymetrów elektronicznych jest
scentrowaniu i spoziomowaniu przyrządu i po
nastawieniu jeszcze lunety na cel należy tylko
zorientować krąg poziomy. Poza tym interwencja
operatora sprowadza się do włączania pożądanych
operacji i programów przez naciśnięcie odpowiednich
klawiszy i do wprowadzania niezbędnych danych.
Przy jednym wycelowaniu sam proces pomiarowy
trwa od 5 do 10 sekund. Szybkość wykonywania
pomiarów w terenie jest więc podyktowana tylko
prędkością przenoszenia reflektora-celownika z punktu
na punkt.
Należy tu jeszcze podkreślić niezwykle szybki
rozwój zintegrowanych tachymetrów elektronicznych:
jest on stymulowany może me tyle rzeczywistymi
potrzebami praktyki geodezyjnej, ile ostrą konkurencją
na rynku światowym systemów różnych firm.
Konkurencja ta zmusza producentów tych przyrządów
do oferowania potencjalnym użytkownikom coraz to
bardziej atrakcyjnych rozwiązań, i to zarówno pod
względem komfortu pracy, jak i zakresu możliwych
zastosowań. Ewolucja w tym zakresie przejawia się
głównie w rozwoju oprzyrządowania i oprogramowania
tachymetrów. W związku z tym obserwuje się szybkie,
nawet sezonowe udoskonalenia w coraz nowszych
modelach tych przyrządów.

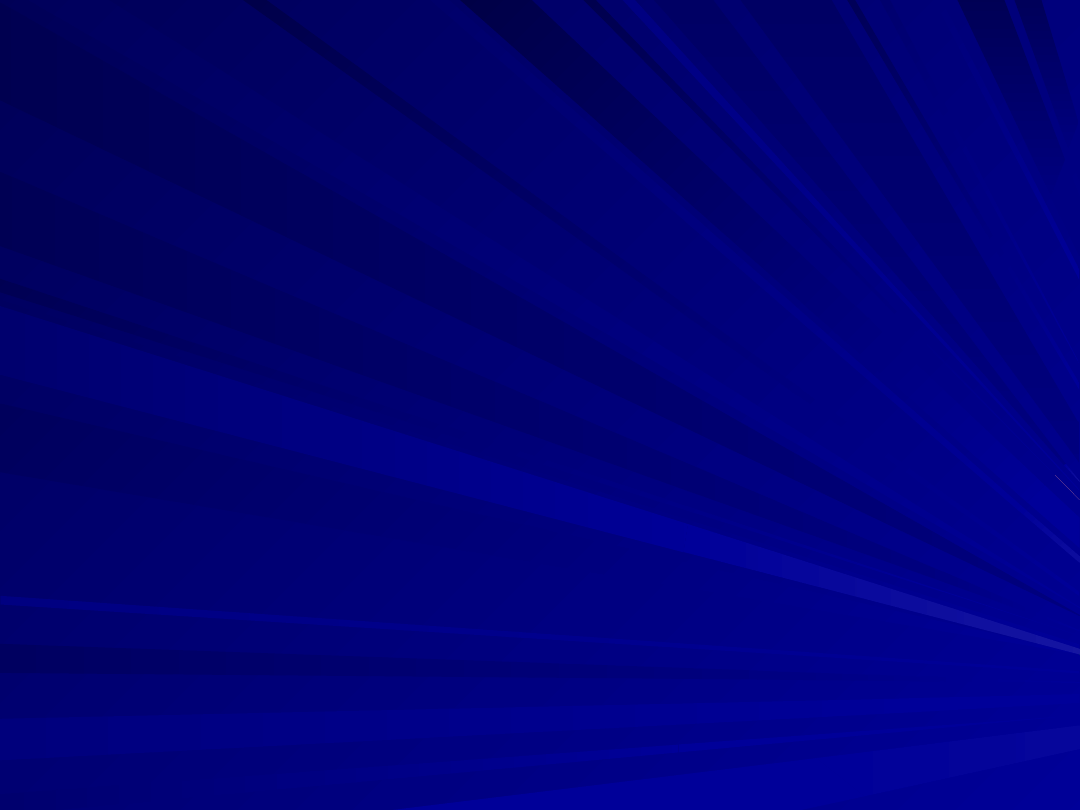
Przykładowe dane techniczne
Przykładowe dane techniczne
współczesnego tachymetru
współczesnego tachymetru
elektronicznego : Sokkia
elektronicznego : Sokkia
SET
5F
Luneta
Długość
165mm
Powiększenie
30X
Pole widzenia
1 stopień 30 minut (26m/1000m)
Minimalny fokus
1.3m
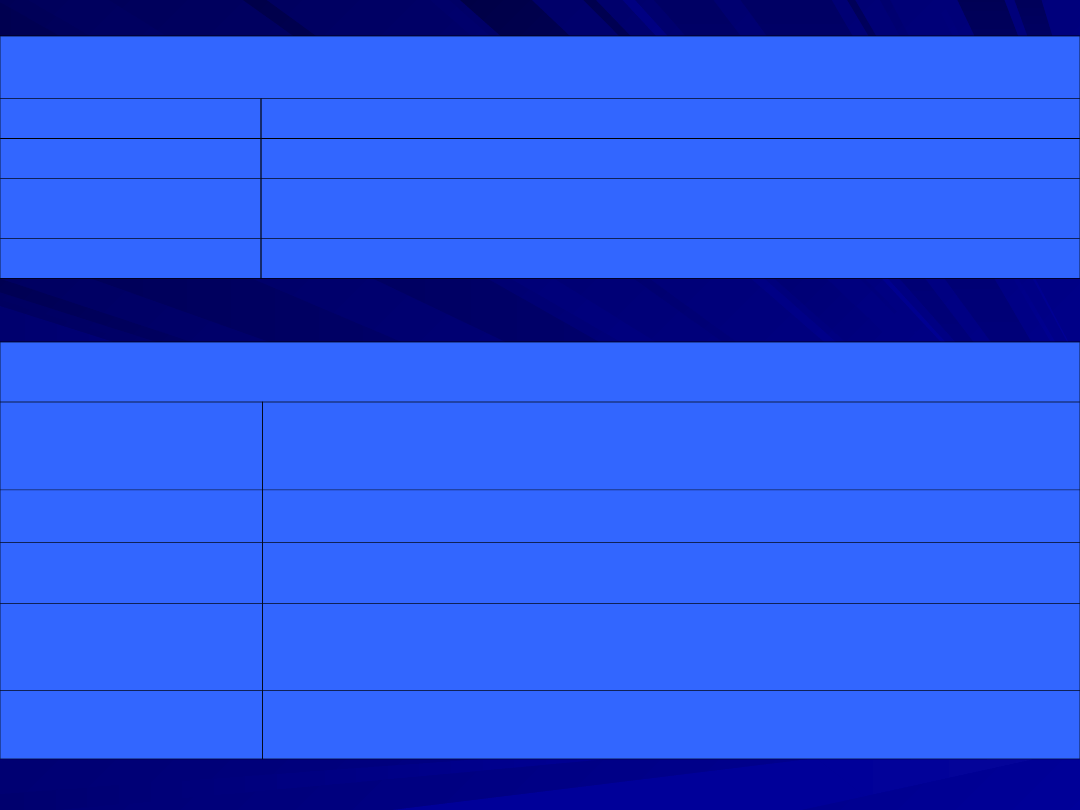
Pomiar kąta
Dokładność
wyświetlania
1"/0.2mgon/0.005mil or (5"/1mgon/0.02mil)
Jednostki (H/V)
Degree, Gon, Mil
Dokładność(H/V)
5" (1.5mgon/0.02mil)
Czas
pomiaru(H/V)
poniżej 0.5s, ciągły
Kompensator
dwuosiowy
Zakres: +/-3'(+/-55mgon),
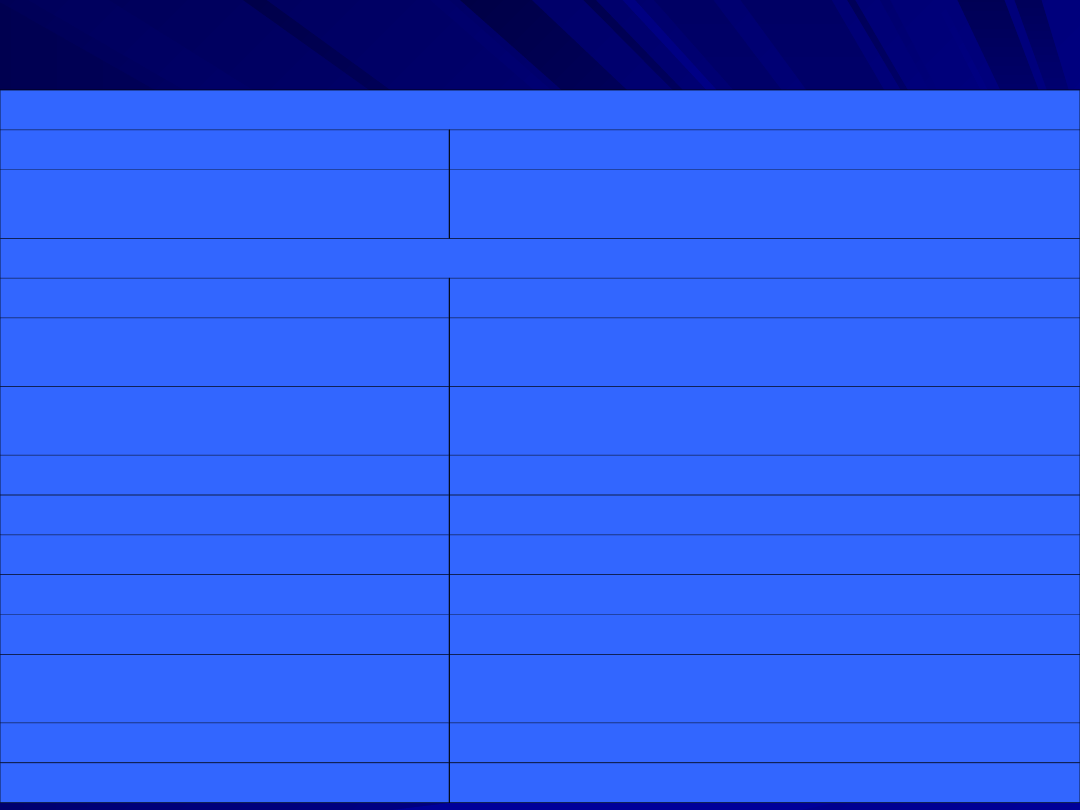
Pomiar odległości
Typ
bliska podczerwień LED, 3 częstotliwości,
Warunki pogodowe
N = Normalne warunki widoczność około 20km
D = Dobre warunki widoczność około 40km
Zasięg
Z pryzmatem CP01 N. 1.3m do 700m
Z pojedynczym pryzmatem AP01
N. 1.3m do 1200m
Z pojedynczym pryzmatem AP01
D. 1.3m do 1,500m
Z potrójnym pryzmatem AP01 N. 1.3m do 1,600m
Z potrójnym pryzmatem AP01 D. 1.3m do 2,000m
Jednostki
metry lub stopy
Dokładność: tryb precyzyjny
+/-(3 + 2ppm x D) mm
Czas pomiaru
Pomiar precyzyjny: około 3.2s (inicjacja. 4.7s)
Korekta warunków
atmosferycznych
zakres: -30 C do +60 C i 500 hPa do 1,400 hPa
Stała lustra
-99mm do 0mm (krok 1mm)
Refrakcja / krzywizna Ziemi
ON/OFF do wyboru
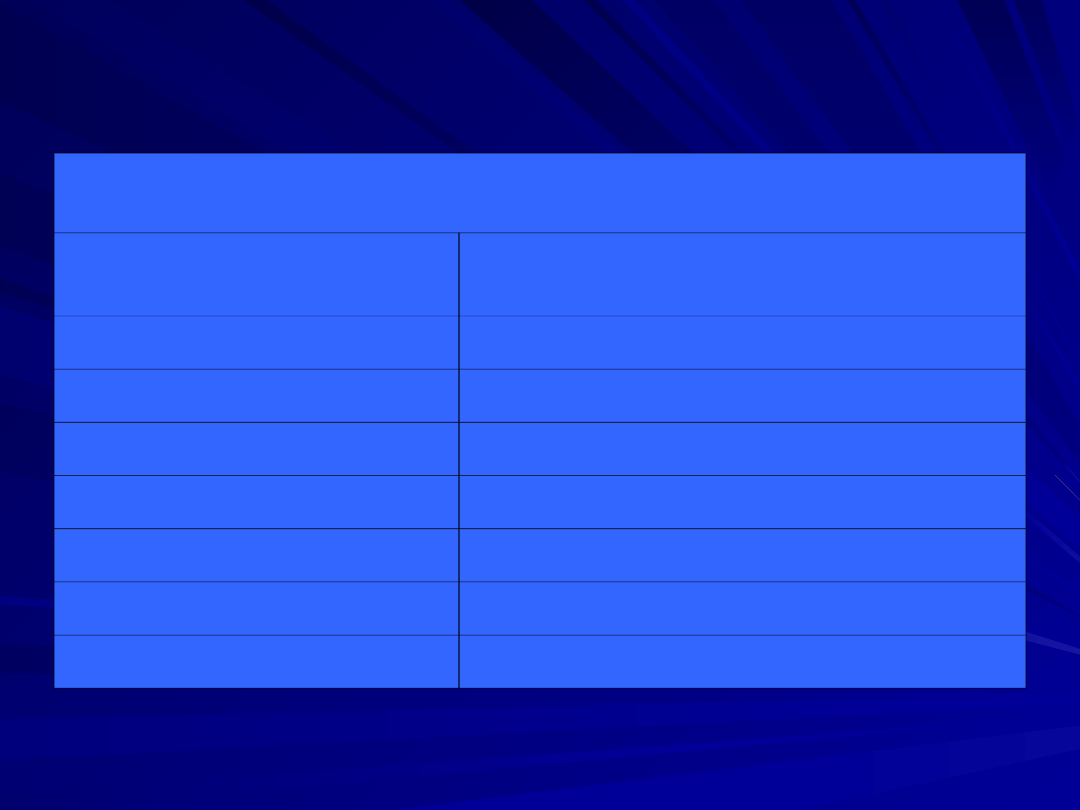
Specyfikacja
Wyświetlacz
2 LCD graficzny, 20 znaków x 4
linie
Klawiatura
5 klawiszy,
Pion optyczny
w alidadzie, powiększenie: 3X.
Pamięć
na 3000 punktów
Interface
zgodny z RS-232C
Temperatura pracy
-20 C do +50 C
Waga
5.5kg, bateria: 230g
Napięcie
6V DC
Zasilanie
Bateria
Ni-Cd,
Czas pracy
przy temp.
25C
Pomiar odległości i kąta
BDC25: około 5 h (około 600 punktów)
Opcjonalna bateria BDC12: około 25 h
(około 3000 punktów)
Tylko pomiar kąta
BDC25: około 9 h
Opcjonalna bateria BDC12: około 45 h
Czas
ładowania
CDC27/31: około 80 minut
CDC11/11D/11E: około 15 h
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
ElektroterapiaDarek ppt
ALTERNATYWNE ELEKTROCHEMICZNE ppt
39 Wzmacniacze elektrohydrauliczne zawory proporcjonalne i serwomechanizmy elektrohydrauliczne ppt
Rozwój oraz zastosowanie bankowości elektronicznej ppt
W2 Podstawy elektrotechniki ppt
9 wspolczynnik zalamania, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium,
RÓWNOWAGA KWASOWO ZASADOWA I GOSPODARKA WODNO ELEKTROLITOWA ppt
PROCESY TRANSPORTU W ROZTWORACH ELEKTROLITÓW ppt
2008 antropopresja wspolczesna przemyslowaid 26474 ppt
Pomiar współczynnika lepkości2, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laborat
ZABURZENIA GOSPODARKI WODNO ELEKTROLITOWEJ ppt
Wykład 18 Pole elektryczne ppt
mechanizm reakcji addycji elektrofilowej ppt
Wykład 17 Elektrostatyka ppt
ElektroterapiaDarek ppt
więcej podobnych podstron