Ruch drgający
Wykład 6
1
Przypominam
Zasady zaliczania w semestrze I
• Przedmiot w tym semestrze jest zaliczany w formie
pracy pisemnej
• Zaliczanie w formie pracy pisemnej polega na
odpowiedzi na 6 pytań definicyjnych i jedno opisowe.
• Podstawą do wpisania do indeksu zaliczenia
przedmiotu jest wcześniejsze zaliczenie ćwiczeń
rachunkowych.
• Osoby które nie zaliczą przedmiotu w pierwszym
terminie przed kolejnym zaliczeniem muszą uzyskać
pozytywny wpis z ćwiczeń i zaliczyć kurs
• Osoba raz przyłapana na ściąganiu wszystkie
następne zaliczenie będzie odpowiadała ustnie
6.1. Ruch drgający
Ruch
w
przyrodzie
jest
zjawiskiem
powszechnym. Wszystkie obserwowane w przyrodzie
ruchy dzielimy na dwie klasy:
- oscylacje (tzw. drgania) – gdy poruszający się
obiekt pozostaje w pobliżu ustalonego miejsca –
punktu równowagi. Przykłady takich drgań to:
ciężarek na sprężynie, wahadło matematyczne, ruch
elektronów w atomach, ruch fotonów między
zwierciadłami lasera;
- fale – gdy obserwowane zjawisko (poruszający
się obiekt) przemieszcza się w przestrzeni: np. fale
morskie, ruch elektronów w lampie kineskopowej,
ruch odkształcenia biegnącego wzdłuż napiętej liny.
3
A ( t )
t
Ruchem drgającym, lub wprost drganiami
nazywamy dowolne zjawisko fizyczne (każdy
ruch lub zmianę stanu) charakteryzujące się
powtarzalnością w czasie wielkości fizycznej
A(t) opisującej ten proces.
4
Ze względu na opisujący „drgający” parametr A(t)
drgania możemy podzielić na:
-
mechaniczne
: zmieniają się współrzędne
opisujące położenie ciała;
-
elektryczn
e: zmienia się np. napięcie U(t) lub
ładunek Q(t) na kondensatorze obwodu RLC;
-
elektromagnetyczne
: drgają pola elektryczne i
magnetyczne. Zmieniają się wektory opisujące te pola.
Wśród szerokiej klasy drgań możemy wyróżnić
drgania harmoni-czne
.
Drgania harmoniczne to takie drgania, w których
wielkość charakteryzująca dany układ zmienia się
z czasem sinusoidalnie lub kosinusoidalnie.
5
Wśród szerokiej klasy drgań możemy wyróżnić drgania
harmoniczne.
Drgania harmoniczne to takie drgania, w których
wielkość charakteryzująca dany układ zmienia się z
czasem sinusoidalnie lub cosinusoidalnie.
o
o
t
cos
A
t
A
T
T
A
o
A
o
A
o
t
A ( t )
A c o s
o
o
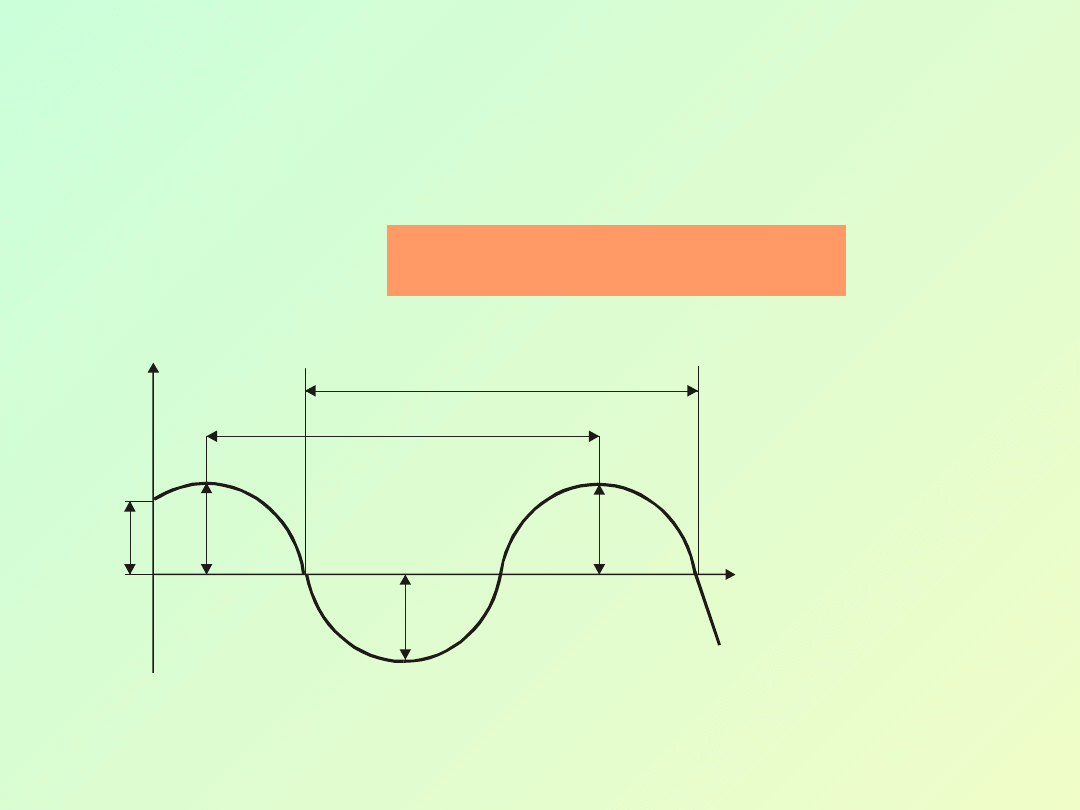
Wykres
przedstawia
drgania
harmoniczne z
fazą początkową
o
różną od zera,
amplitudą A
o
i
okresem T.
6
Drgania harmoniczne charakteryzuje:
1. > okresowość; tzn. istnieje taki odstęp czasu T, że
dla dowolnego czasu t zachodzi:
T – nazywamy okresem drgań;
2. > stałość maksymalnego „wychylenia” A
o
zwanego amplitudą drgań;
3. > Stałość okresu T.
Skoro T=const, to wielkość określa liczbę drgań
w ciągu jednostki czasu.
Wielkość nosi nazwę częstości drgań
T
t
A
t
A
T
1
7
Wielkość nosi nazwę częstości drgań i spełnia
związki
(6.2)
gdzie:
to częstość kątowa lub pulsacja
drgań.
Częstość mierzymy w hercach .
Argument funkcji cosinus (lub sinus)
(6.3)
w wyrażeniu (6.1) nazywamy fazą drgań, a wielkość
o
= const fazą początkową.
2
T
1
T
2
1
s
1
Hz
1
o
t
t
8
Jeżeli chcemy opisać matematycznie drgania to
musimy podać:
- >> postać funkcji A(t) albo
- >>równanie matematyczna – zwane
równaniem ruchu, z którego funkcja A(t) może
być obliczona
.
9
6.2.
Prędkość
i
przyspieszenie
punktu
drgającego
Pamiętamy, że prędkość ruchu ciała
wyrażamy jako pochodną
Zaś przyspieszenie ruchu ciała a ma postać:
zatem dla dowolnej wielkości A(t) prędkość
punktu drgającego otrzymujemy, różniczkując
funkcję (6.1) względem czasu
Różniczkując ponownie tę zależność względem
czasu, znajdujemy przyspieszenie
dt
ds
t
S
lim
0
t
2
2
0
t
dt
s
d
dt
d
t
lim
a
o
o
t
sin
A
dt
dA
o
2
o
t
cos
A
dt
d
a
10
Porównując
ww.
wzory
widzimy,
że
przyspieszenie jest proporcjonalne do wychylenia
(6.6)
Jak widać wzór (6.6) pozwala zdefiniować
ruch
harmoniczny jako taki ruch, w którym siła F(t)
działająca na układ drgający jest wprost
proporcjonalna do wychylenia i przeciwnie do
tego wychylenia skierowana
t
A
a
2
t
A
m
a
m
t
F
2
Drgania harmoniczne opisane równaniem
(6.1) można także wyrazić w postaci
przy czym .
1
t
sin
A
t
A
2
0
1
11
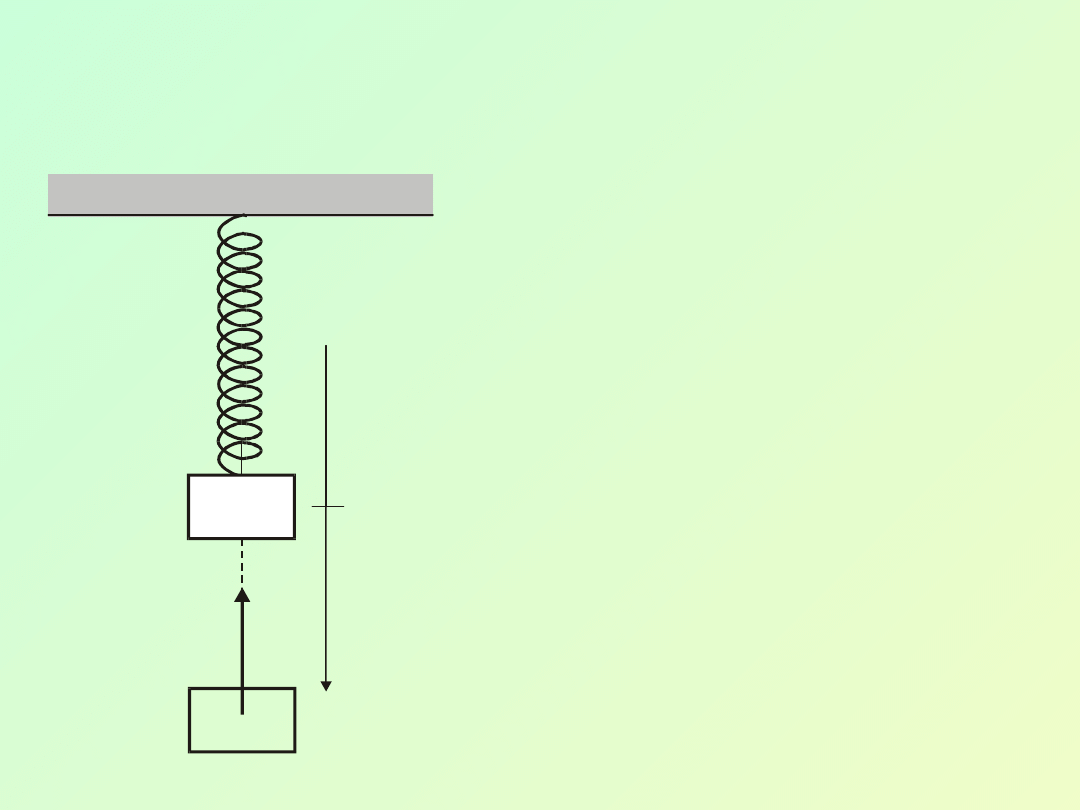
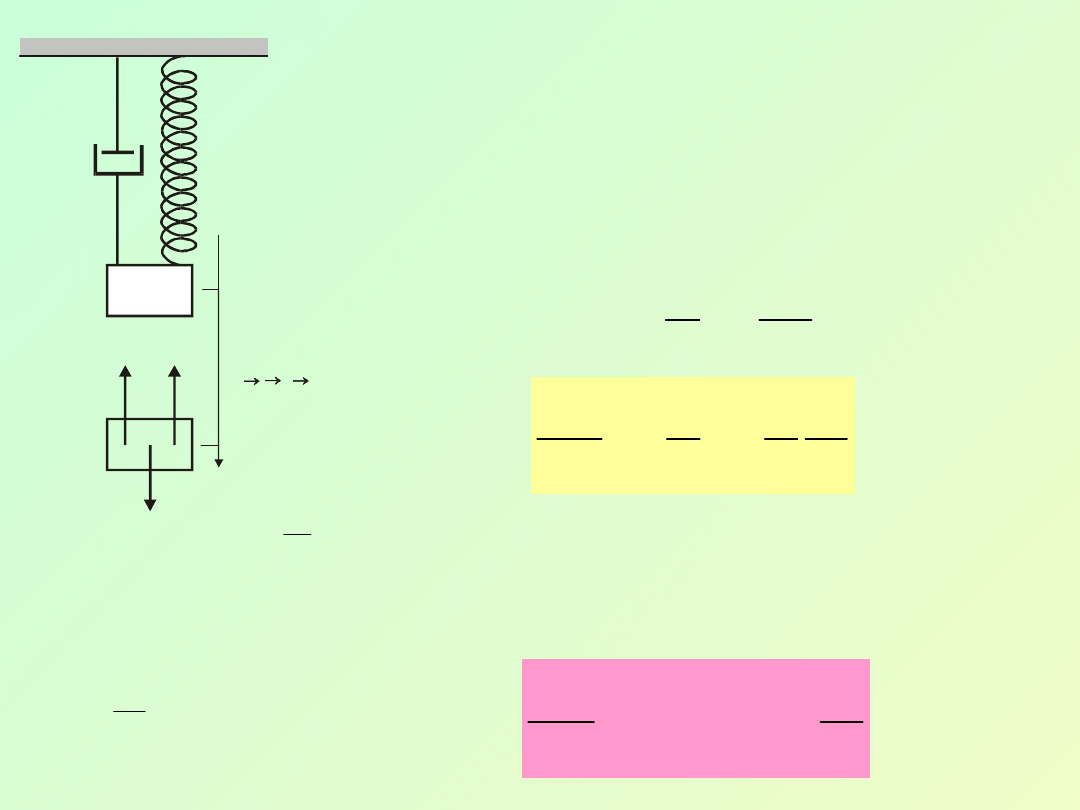
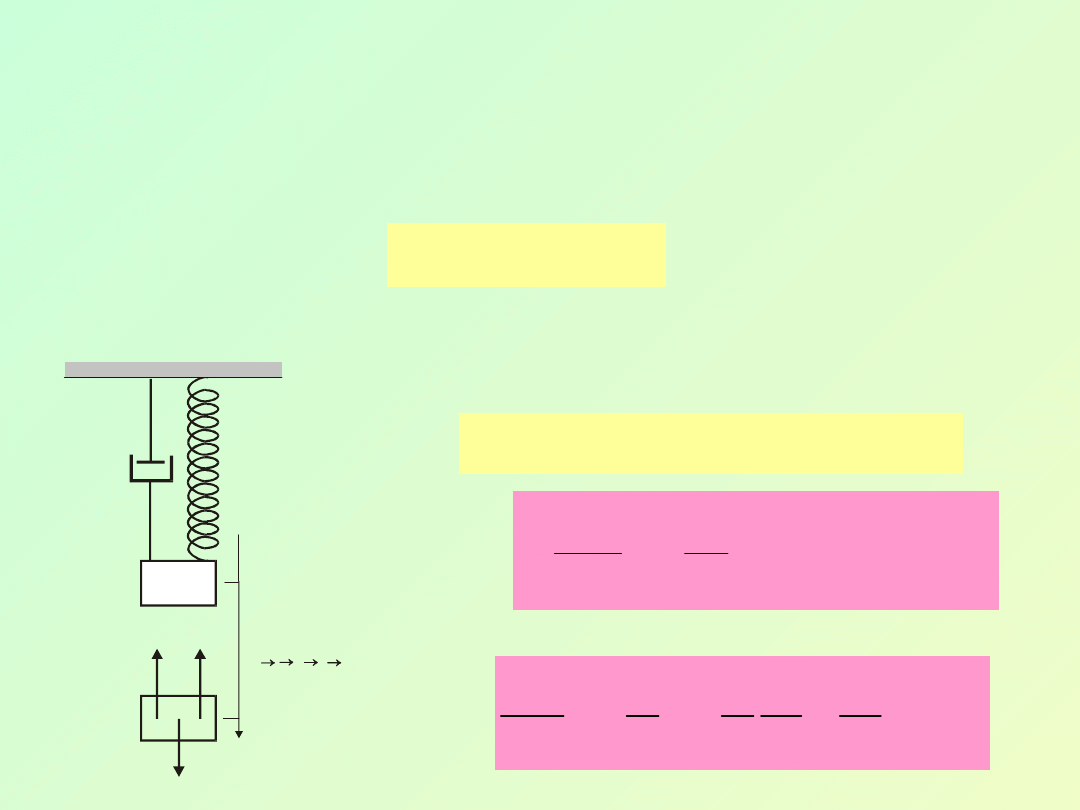
6.3. Drgania swobodne
Niech na sprężynie będzie zaczepiona masa m,
tak jak na rys.
m
F
s
0
x
F = F
s
Mechaniczny oscylator
harmoniczny
Gdy wychylamy ciało o masie m z
położenia równowagi x = 0 o x to
zgodnie z definicją siły sprężystej
na układ działa siła F
s
:
(6.7)
Siła
sprężystości
F
s
jest
proporcjonalna do wychylenia x i
przeciwnie do niego skierowana.
Współczynnik proporcjonalności
k
nazywany
jest
zwykle
współczynnikiem
sprężystości
lub stałą siłową sprężyny.
Współczynnik sprężystości mówi
nam jaka siła jest potrzebna do
wydłużenia sprężyny o jednostkę
długości i ma wymiar [N/m].
kx
F
s
12
Zgodnie z II zasadą dynamiki Newtona:
dla oscylatora harmonicznego możemy zapisać:
czyli
(6.8)
Oznaczając formalnie
(6.9)
(6.8) przyjmie postać:
(6.10)
Równanie (6.10) nosi nazwę równania ruchu drgań
swobodnych punktu materialnego
. Jest to
równanie różniczkowe rzędu drugiego
jednorodne.
ma
F
2
2
dt
x
d
m
kx
x
m
k
dt
x
d
2
2
2
o
m
k
x
dt
x
d
2
o
2
2
13
Aby znaleźć funkcję x(t) opisującą drgania
oscylatora swobodnego należy rozwiązać równanie
(6.10).
Na podstawie naszej wiedzy z matematyki i
wcześniejszych rozważań postulujemy, że funkcja
typu
(6.11)
winna być rozwiązaniem równania ruchu (6.10).
Podstawiając (6.11) i wyrażenie (6.12)
(6.12)
obliczone z (6.11) do równania (6.10) otrzymujemy:
(6.13)
o
o
t
cos
A
t
x
o
o
2
2
2
t
cos
A
dt
x
d
o
o
2
o
o
o
2
t
cos
A
t
cos
A
14
Widzimy, że równość
zachodzi jeżeli
gdzie
(6.14)
jest
częstotliwością kołową drgań własnych układu
.
Jeżeli znamy stałą siłową k sprężyny i masę m
ciała zawieszonego na tej sprężynie, to możemy
obliczyć
o
(okres T) drgań własnych układu. Drgania
swobodne (własne) są zatem drganiami harmonicznymi
opisanymi funkcją
(6.15)
o
o
2
o
o
o
2
t
cos
A
t
cos
A
o
m
k
o
o
o
o
t
cos
A
t
x
Punkt materialny wykonujący drgania
harmoniczne opisane (6.15) nosi nazwę
oscylatora harmonicznego nietłumionego.
15
Punkt materialny wykonujący drgania harmoniczne
opisane (6.15) nosi nazwę oscylatora harmonicznego
nietłumionego.
Amplituda A
o
i faza początkowa
o
drgań
swobodnych (własnych) zależą od sposobu pobudzania
układu drgań.
Drgania
swobodne
wykonują
też
wahadła
matematyczne i fizyczne.
Drgania
swobodne
nie
muszą
być
wyłącznie
mechaniczne, np. w obwodzie elektrycznym złożonym z
indukcyjności L i pojemności C występują drgania
(swobodne) elektryczne.
Jeżeli w równaniu (6.10) zastąpimy x(t) przez A(t)
to uzyskamy uogólnione równanie ruchu drgań
swobodnych w postaci:
(6.16)
A
dt
A
d
2
o
2
2
o
o
o
t
cos
A
t
x
16
Obliczmy teraz całkowitą energię mechaniczną E
drgającego harmonicznie punktu materialnego.
Energia kinetyczna E
k
wyrazi się wzorem:
, gdzie
(6.17)
Energia kinetyczna zmienia się od zera dla największego
wychylenia x i osiąga wartość maksymalną
dla wychylenia x = 0.
2
2
k
dt
dx
m
2
1
2
m
E
o
o
o
t
cos
A
x
o
o
2
2
o
2
o
k
t
sin
A
m
2
1
E
2
o
2
o
max
k
A
m
2
1
E
17
Energię potencjalną E
p
drgającego punktu obliczamy,
wyznaczając
energię
potencjalną
rozciągniętej
sprężyny. Energia potencjalna zgromadzona w
rozciągniętej sprężynie równa się pracy W włożonej
przy rozciąganiu tej sprężyny.
Czyli ,
gdzie
x
0
2
x
0
x
0
s
kx
2
1
kxdx
dx
kx
dx
F
W
2
p
kx
2
1
W
E
o
o
o
t
cos
A
x
o
o
2
2
o
p
t
cos
kA
2
1
E
Ale
pamiętamy
(patrz
(6.14)), że
m
k
o
2
o
m
k
wtedy
o
o
2
2
o
2
o
p
t
cos
A
m
2
1
E
18
Całkowita energia mechaniczna E jest
równa
o
o
2
o
2
2
o
2
o
p
k
t
cos
t
sin
A
m
2
1
E
E
E
2
o
2
o
A
m
2
1
E
Widzimy zatem, że w ruchu harmonicznym energia
potencjalna i kinetyczna punktu wykonującego
drganie zmieniają się w taki sposób, że ich suma
pozostaje stała. Jest to zgodne z zasadą zachowania
energii mechanicznej, gdyż w przypadku drgań
swobodnych straty energii mechanicznej nie
występują.
19
T / 2 T 3 T / 2 t
T / 2 T 3 T / 2 t
T / 2 T 3 T / 2 t
T / 2 T 3 T / 2 t
x
a
E
E = E + E
c
k
p
E
E
k
p
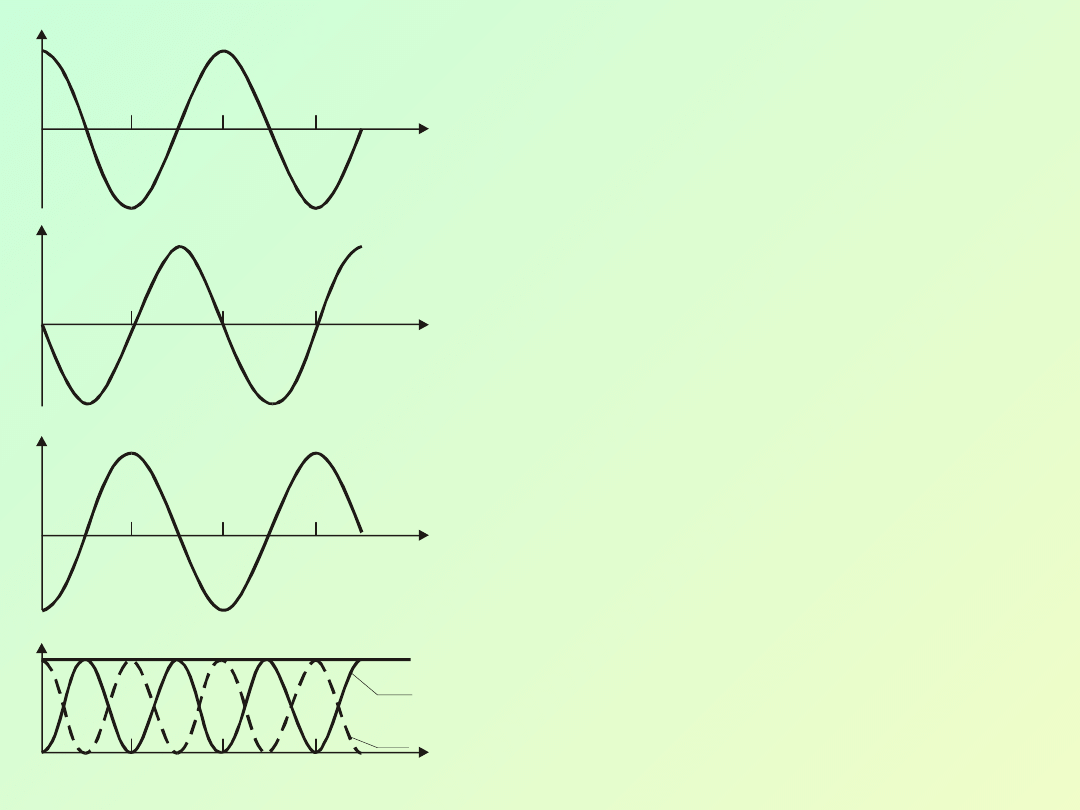
Na
rysunku
pokazano
zależność x(t), (t), a(t), E
k
(t)
i E
p
(t) drgań swobodnych.
Zwróćmy uwagę, że
wykres
(t) jest przesunięty w
stosunku do wykresu x(t) o
/4
;
to samo dotyczy wykresu
a(t) w stosunku do wykresu
(t).
Mówimy, że między
prędkością a wychyleniem
oraz
między
przyspieszeniem
a
prędkością
występuje
przesunięcie
fazowe
równe /4.
20
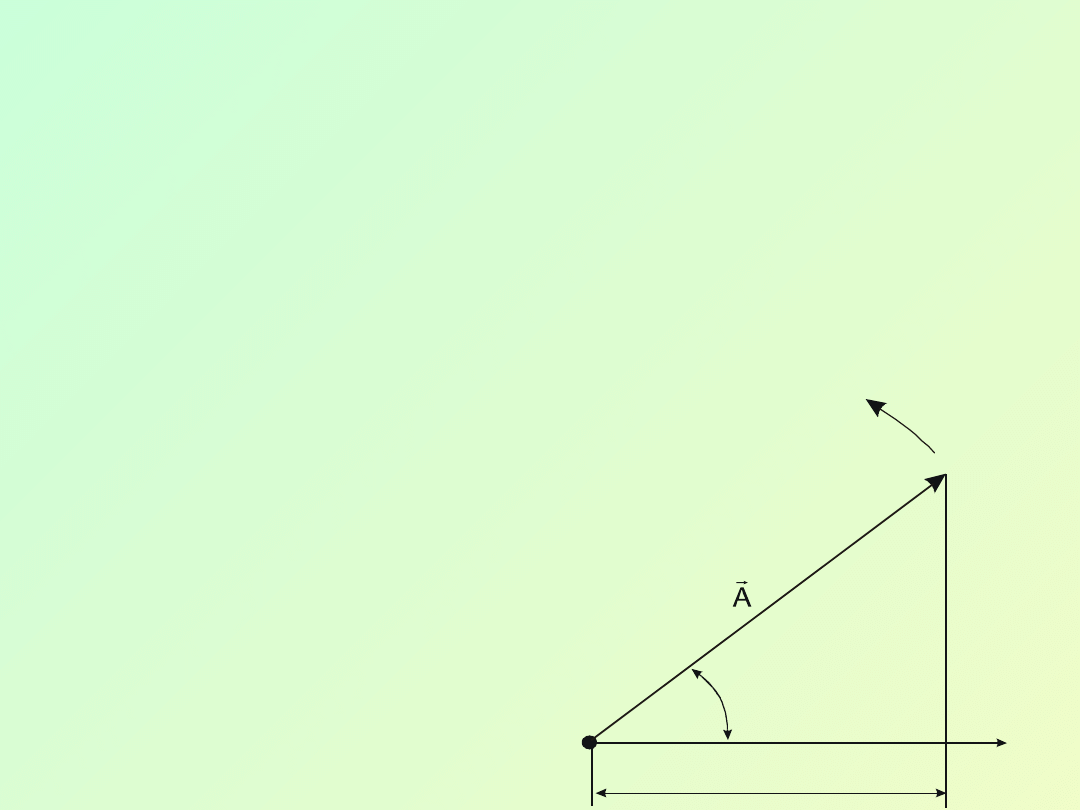
Drgania harmoniczne można również
przedstawić graficznie za pomocą obracającego
się wektora amplitudy
.
Jest to metoda wektorowa. W tym celu z
dowolnego punktu 0 osi x pod kątem równym fazie
początkowej drgań wykreślamy wektor , którego
moduł jest równy amplitudzie A rozważanego drgania
(rys. 8.2). Jeżeli wektor wprawimy w obrót z
prędkością kątową , to rzut końca wektora będzie się
przemieszczać wzdłuż osi x i przyjmować wartości od
+A do –A, a drgająca wielkość będzie zmieniać się w
czasie według wzoru .
o
0
s
x
A
zatem
obracający
się
wektor
ampli-tudy
w
zupełności
charakteryzuje
drganie harmoniczne.
21
Dodawanie drgań harmonicznych równoległych o tej
samej częstotliwości
Rozważmy teraz przypadek, gdy punkt materialny
wykonuje jednocześnie dwa (lub więcej drgania
harmoniczne równoległe o tej samej częstotliwości
kołowej, czyli o tej samej pulsacji, lecz różniące się fazą.
Drgania nazywamy równoległymi, gdy zachodzą wzdłuż
tej samej prostej. Załóżmy, że rozważane przez nas
drgania zachodzą wzdłuż osi x. Możemy je wtedy wyrazić
równaniami
1
1
1
t
cos
A
x
2
2
2
t
cos
A
x
przy czym występująca między drganiami różnica faz
, nosi nazwę przesunięcia fazowego.
1
2
Drganie wypadkowe rozważanego punktu jest
superpozycją jego drgań składowych, a wychylenie
wypadkowe jest sumą jego wychyleń składowych
22
Drganie wypadkowe rozważanego punktu jest
superpozycją jego drgań składowych, a wychylenie
wypadkowe jest sumą jego wychyleń składowych, zatem
Stosując
odpowiednie
wzory
trygonometryczne,
wyrażenie powyższe można sprowadzić do postaci
2
2
1
1
2
1
t
cos
A
t
cos
A
x
x
x
t
cos
A
x
1
1
2
2
1
2
2
2
1
cos
A
A
2
A
A
A
2
2
1
1
2
2
1
1
cos
A
cos
A
sin
A
sin
A
tg
gdzie
Widzimy, że złożenie dwóch drgań harmonicznych o jednakowych
pulsacjach różniących się fazą daje w wyniku drganie o tej samej
pulsacji. Jasne jest, że to samo dotyczy złożenia większej liczby
drgań.
Konkludując
możemy
stwierdzić,
że
dodawanie
drgań
harmonicznych
równoległych,
o
jednakowych
pulsacjach
różniących się fazą, daje w wyniku drganie harmoniczne o tej
samej pulsacji.
23
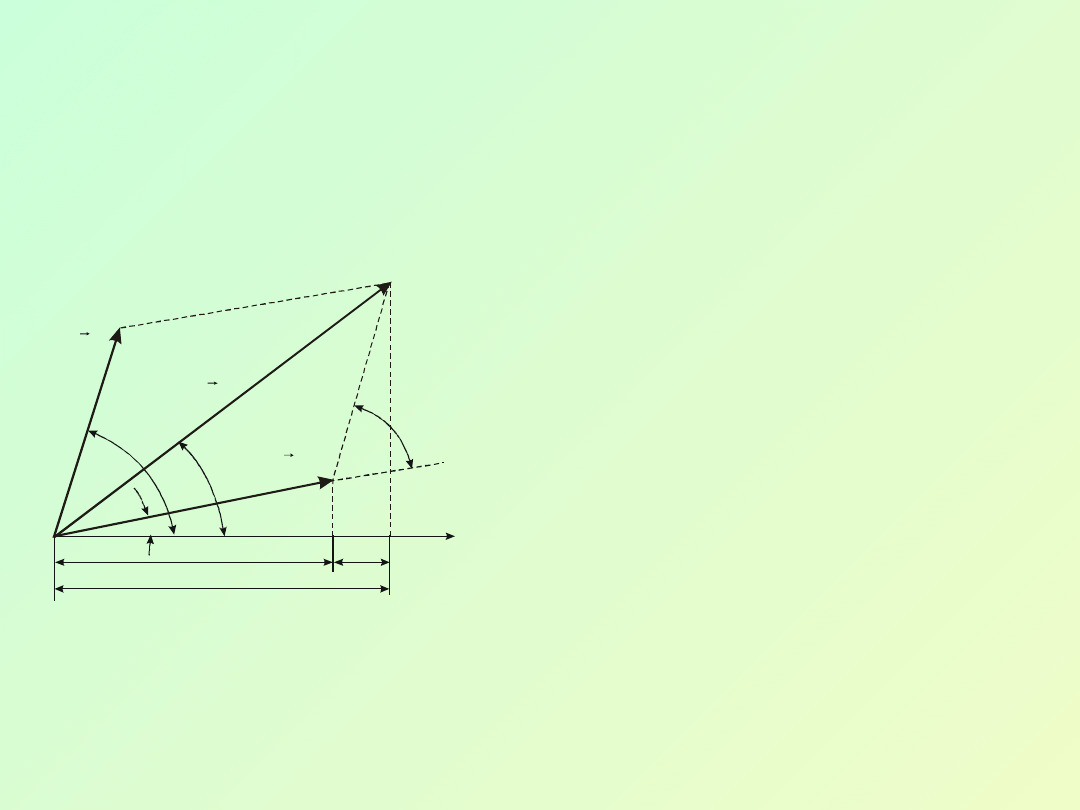
Składanie drgań harmonicznych równoległych o
jednakowej częstości. Dudnienie
Ciało drgające może brać udział w kilku
procesach drgających, a wówczas należy określić
wypadkowy ruch drgający ciała. Dokonamy złożenia
drgań harmonicznych o jednakowych częstotliwościach
x
x
1
x
2
x
1
A
2
A
A
O
1
1
2
-
2
1
1
1
t
cos
A
x
o
2
2
2
t
cos
A
x
o
Wektory
i
obracają
się z jednakową częstością
kątową
, a różnica faz
pomiędzy nimi pozostaje
stała. Wówczas równanie
drgania wypadkowego ma
postać
A
1
A
1
o
1
2
t
cos
A
x
x
x
o
2
1
24
t
cos
A
x
x
x
o
2
1
gdzie amplituda A i faza φ są określone wyrażeniami
1
2
2
1
2
2
2
1
2
2
cos
A
A
A
A
A
2
2
1
1
2
2
1
1
cos
A
cos
A
sin
A
sin
A
tg
Wobec tego ciało biorące udział w dwóch drganiach
harmonicznych o jednakowych kierunkach wykonuje
także drgania harmoniczne w tym kierunku i o tej samej
częstotliwości co drgania składowe. Amplituda drgania
wypadkowego zależy od różnicy faz
drgań
składowych:
1
2
gdy
, wówczas ,
gdy
,wówczas .
,...
,
,
m
m
2
1
0
2
1
2
,...
,
,
m
m
2
1
0
1
2
1
2
2
1
A
A
A
2
1
A
A
A
25
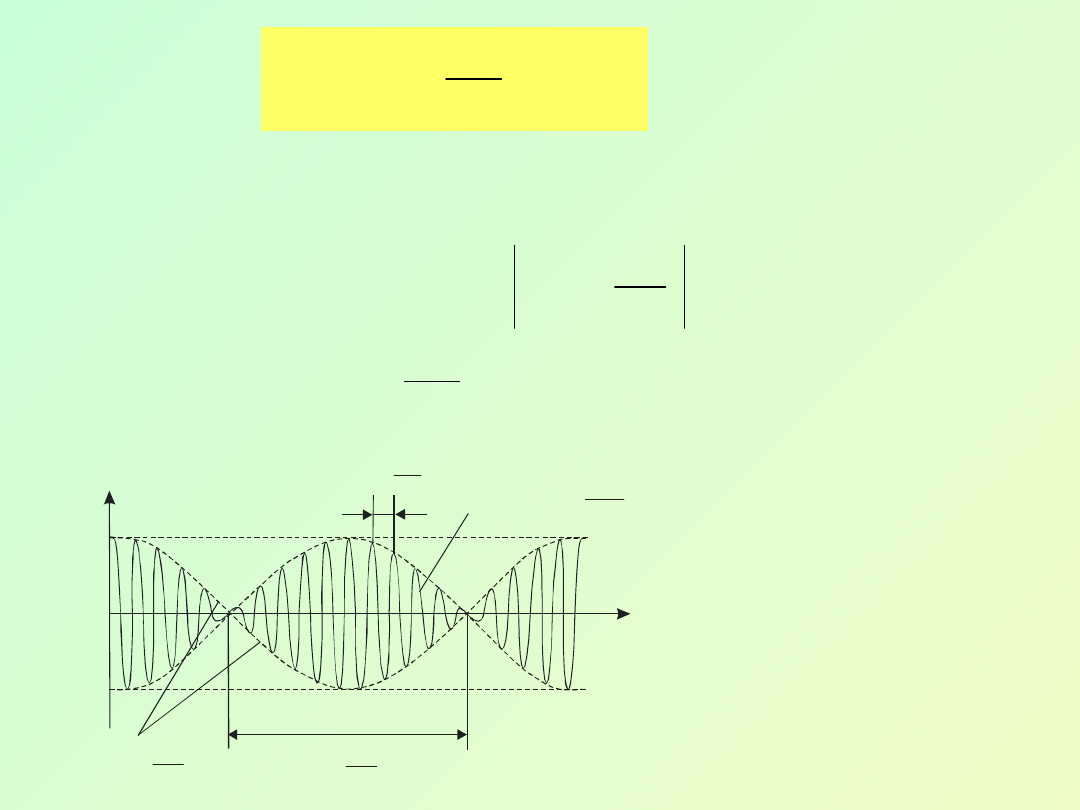
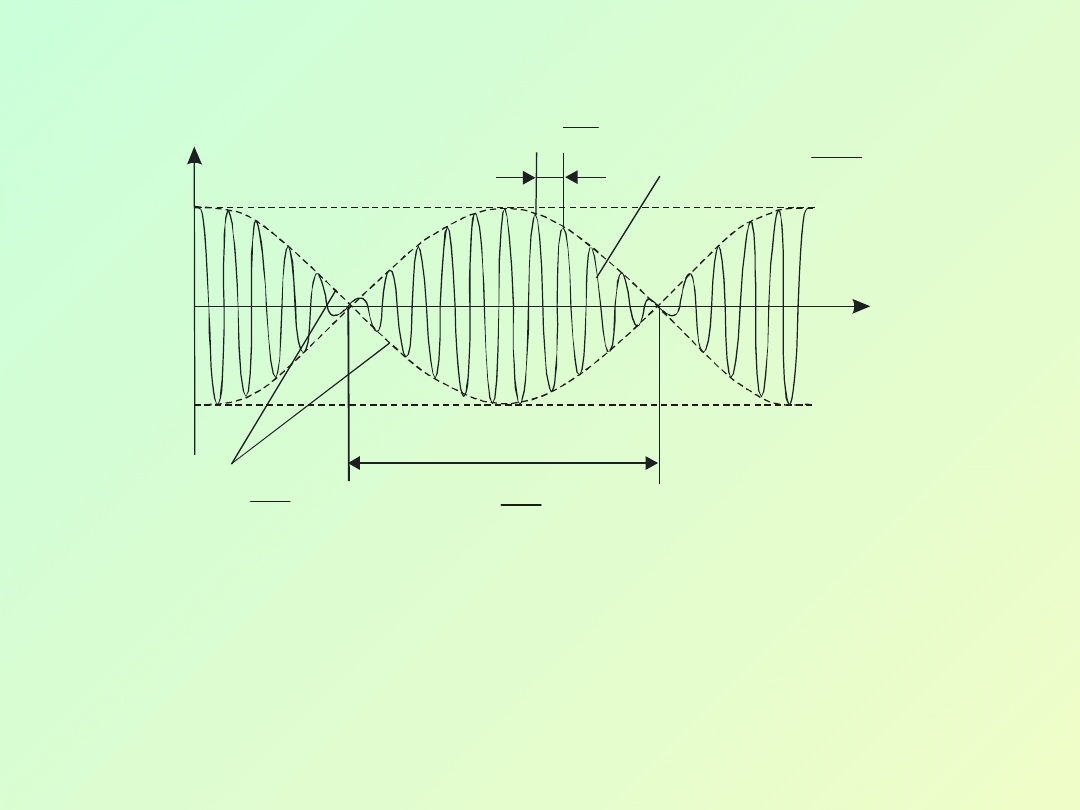
Interesujący
jest
przypadek,
gdy
dwa
dodawane drgania równoległe nieznacznie różnią
się częstotliwościami drgań
. W wyniku dodania tych
drgań otrzymujemy drgania o okresowej zmianie
amplitudy zwane dudnieniem.
Niech amplitudy składanych drgań będą równe A, a ich
częstości kołowe ω i ω+Δω przy czym Δω << ω .
Przyjmijmy, że fazy początkowe drgań są zerowe,
wówczas
t
cos
A
x
1
t
A
x
cos
2
Dodając te wyrażenia i uwzględniając że
,
znajdujemy
ω
/
ω
Δ
2
t
cos
t
cos
A
x
2
2
26
t
cos
t
cos
A
x
2
2
Otrzymane
wyrażenie
jest
iloczynem
czynnika
stanowiącego modulowaną amplitudę
(8.25)
o okresie dudnień
t
cos
A
A
~
2
2
2
o
T
i szybko zmieniającego
się członu cos
t.
2
T
o
2
T
t
c o s
2
t
c o s
A
2
x
t
2
c o s
A
2
A
~
t
2 A
- 2 A
~
A
,
x
27
2
T
o
2
T
t
c o s
2
t
c o s
A
2
x
t
2
c o s
A
2
A
~
t
2 A
- 2 A
~
A
,
x
28
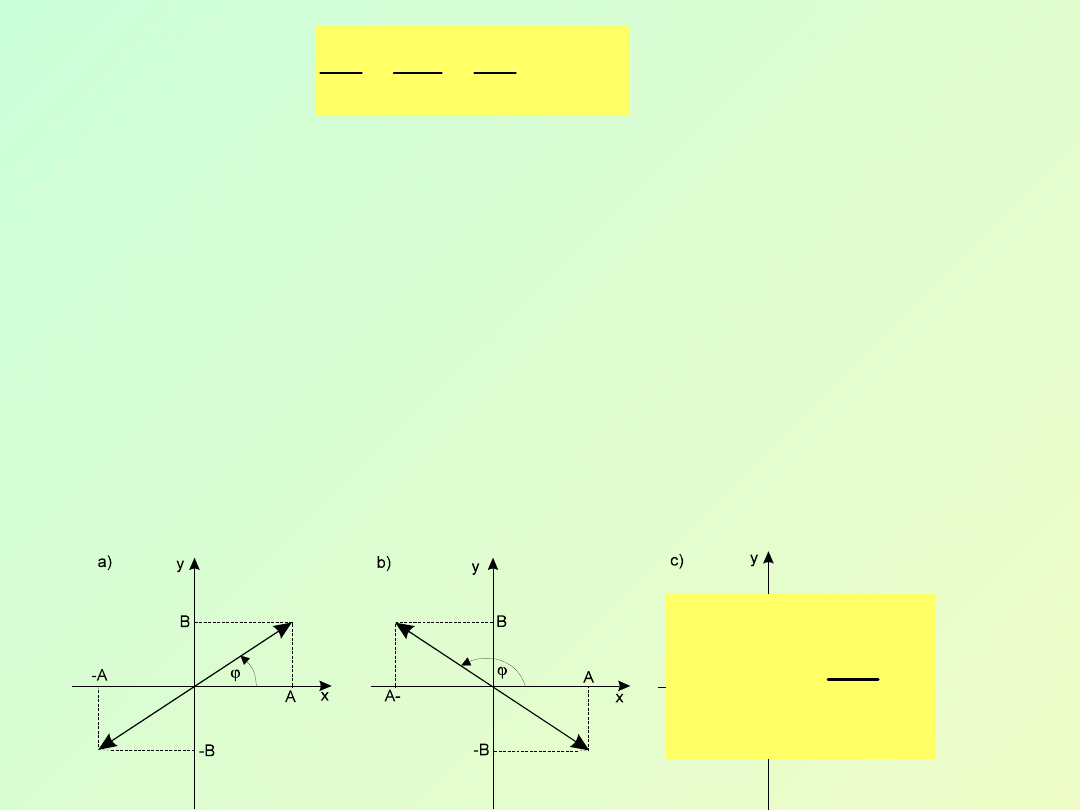
Składanie drgań wzajemnie prostopadłych
Rozważmy
przypadek
złożenia
dwóch
drgań
harmonicznych o jednakowej częstości ω, zachodzących
w kierunkach wzajemnie prostopadłych wzdłuż osi x i y.
Dla prostoty przyjmiemy, że faza początkowa pierwszego
drgania jest zerowa:
t
cos
B
y
t
cos
A
x
Równanie
trajektorii
drgania
wypadkowego
znajdujemy poprzez wyłączenie z ww. wyrażeń
parametru t. Zapisując drganie składowe w postaci
sin
t
sin
cos
t
cos
B
y
;
t
cos
A
x
i zmieniając w drugim wyrażeniu cos ωt na x/A i
sin ωt na
, otrzymujemy po prostych
przekształceniach równanie elipsy
2
1
A
/
x
29
2
2
2
2
2
2
sin
B
y
AB
xy
A
x
Drgający punkt porusza się po elipsie, więc
otrzymaliśmy przypadek tak zwanych drgań
eliptycznie spolaryzowanych.
Orientacja osi elipsy i jej rozmiary zależą od
amplitud drgań składowych i różnicy faz φ .
Rozpatrzymy niektóre szczególne przypadki:
,
,...
,
,
m
m
2
1
0
w tym przypadku elipsa degeneruje się do odcinka
prostej
m
0 2 4
,
,
m
1 3 5
,
,
,
x
A
B
y
30
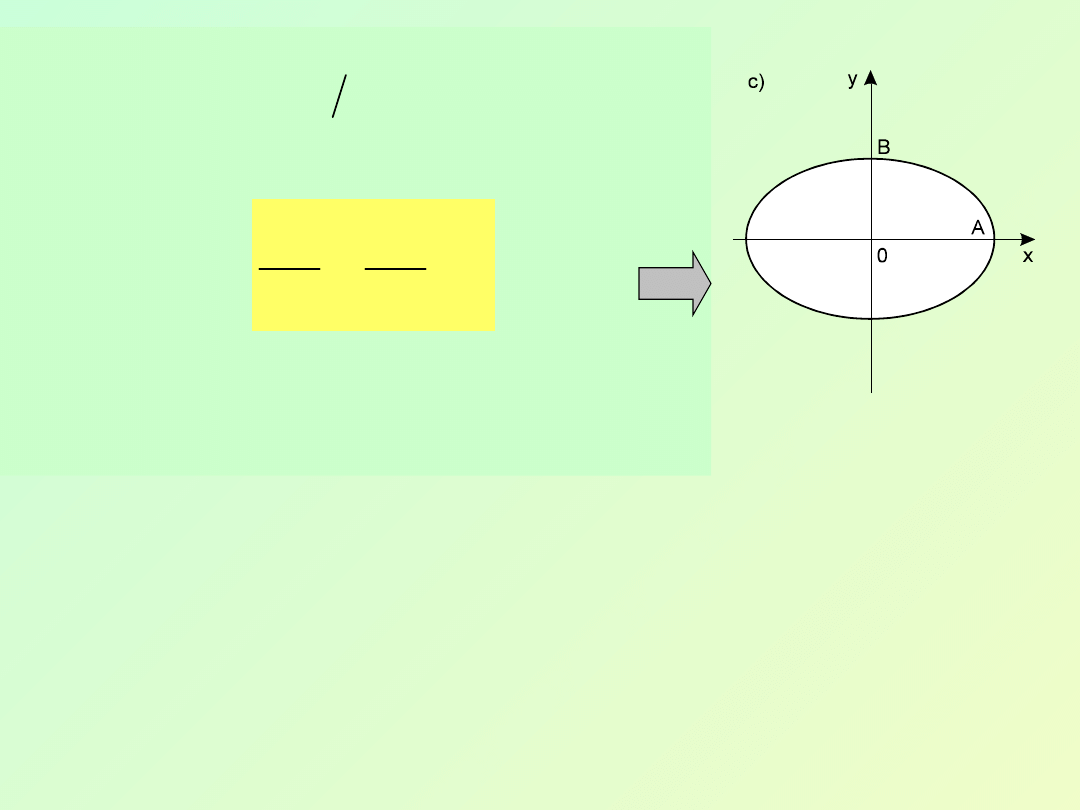
m
0 2 4
,
,
m
1 3 5
,
,
,
,
,...
,
,
m
m
2
1
0
2
1
2
,
,...
,
,
m
m
2
1
0
2
1
2
w tym przypadku otrzymujemy
1
2
2
2
2
B
y
A
x
Jest to równanie elipsy, której osie
pokrywają się z osiami współrzędnych,
a jej półosie są równe odpowiednim
amplitudom
31
6.4. Drgania tłumione
Jeżeli drgania ciała odbywają się w ośrodku
materialnym (np. w gazie, cieczy), to wskutek
występowania siły oporu ośrodka, którą będziemy
nazywać
siłą
tłumiącą,
drgania
będą
zanikać.
Niezależnie od natury ośrodka siła tłumiąca F
t
jest
proporcjonalna do prędkości ciała drgającego (jeśli
prędkość ta jest niewielka). Zatem
(6.20)
Współczynnik
proporcjonalności
f
nazywa
się
współczynnikiem oporu ośrodka.
Znak minus w powyższym wzorze uwzględnia
fakt, że siła jest zawsze skierowana przeciwnie do
kierunku ruchu (kierunku prędkości).
dt
dx
f
F
t
32
m
F
s
F
t
0
x
f k
F F + F
s
t
Uwzględniając działanie siły (6.20)
możemy dla drgań tłumionych,
zgodnie z II zasadą dynamiki,
napisać
Czyli
Albo
(6.21)
ma
F
F
;
ma
F
t
s
2
2
dt
x
d
m
dt
dx
f
kx
dt
dx
m
f
x
m
k
dt
x
d
2
2
Pamiętając, że
jest to częstość kołowa drgań
własnych (czyli częstość z jaką drgałby układ gdyby nie
było tłumienia) oraz oznaczając formalnie
2
o
m
k
2
m
f
Rnie
6.21
przyjmuj
e postać
dt
dx
2
x
dt
x
d
2
o
2
2
33
dt
dx
2
x
dt
x
d
2
o
2
2
Równanie to nosi nazwę równania ruchu drgań
harmonicznych tłumionych.
Jest to równanie
różniczkowe rzędu drugiego, jednorodne.
Rozwiązaniem tego równania jest funkcja
t
cos
e
A
x
1
t
0
gdzie:
to tzw. współczynnik
tłumienia,
a
to pulsacja drgań tłumionych.
m
2
f
2
2
1
o
34
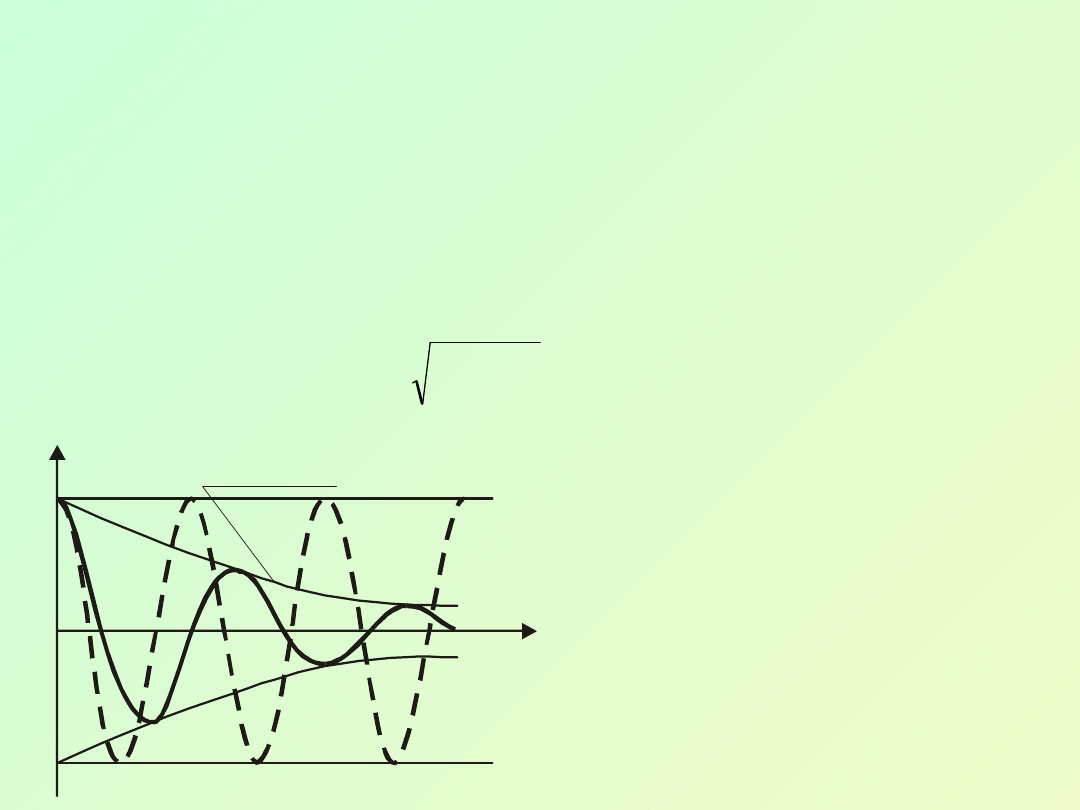
Porównując wzór (6.9) dla drgań swobodnych ze
wzorem (6.24) dla drgań tłumionych widzimy, że
wskutek działania siły tłumiącej:
1. amplituda drgań tłumionych maleje z upływem
czasu według zależności
(6.25)
2. pulsacja drgań tłumionych jest mniejsza niż dla
drgań swobodnych
(6.26)
t
0
e
A
A
o
2
2
1
o
x
A
0
- A
0
t
A = A e
0
- t
Na rysunku
przedstawiono wykres
drgań tłumionych ciała z
naniesionym dla
porównania z wykresem
drgań swobodnych tego
ciała.
35
Wielkością charakteryzującą drgania tłumione
jest tzw. logarytmiczny dekrement tłumienia.
Logarytmiczny
dekrement
tłumienia
jest
to
logarytm naturalny stosunku dwóch amplitud w
chwilach t i t+T. Oznaczając logarytmiczny dekrement
tłumienia literą (lambda) możemy zapisać
T
e
ln
e
A
e
A
ln
T
T
t
o
t
o
Zależności od (6.24) do (6.27) mają sens tylko wtedy,
jeśli
, w przeciwnym razie ruch nie jest ruchem
drgającym, lecz ruchem pełzającym (aperiodycznym).
o
W
celu
scharakteryzowania
drgającego układu wprowadzono
pojęcie dobroci Q, która dla małych
wartości
logarytmicznego
dekrementu tłumienia jest równa
2
o
o
T
Q
36
6.5. Drgania wymuszone
Jeżeli chcemy, aby opory ośrodka nie tłumiły drgań,
to na drgający punkt materialny należy działa
odpowiednio zmienną w czasie siłą. W przypadku drgań
harmonicznych siła ta ma postać:
(6.28)
Siłę tę nazywamy siłą wymuszającą.
t
cos
F
F
0
w
m
F
s
F
t
0
x
f k
F F + F + F
t
s
w
F
w
W przypadku drgań wymuszonych
mamy
Czyli
albo
ma
F
F
F
;
ma
F
w
t
s
t
cos
F
kx
dt
dx
f
dt
x
d
m
0
2
2
t
cos
m
F
dt
dx
m
f
x
m
k
dt
x
d
0
2
2
37
t
cos
m
F
dt
dx
m
f
x
m
k
dt
x
d
0
2
2
Co można zapisać
t
p
dt
dx
x
dt
x
d
o
o
cos
2
2
2
2
gdzie
jest amplitudą znormalizowaną
siły wymuszającej (przeliczoną na jednostkę masy).
Równanie (6.30) nosi nazwę równania ruchu drgań
wymuszonych.
Rozwiązaniem tego równania jest funkcja
(6.31)
m
F
p
o
o
(6.30
)
o
o
t
cos
A
x
2
2
2
2
2
o
o
o
4
p
A
2
2
o
o
2
tg
arc
gdzie
38
2
2
o
o
2
tg
arc
o
o
t
cos
A
x
2
2
2
2
2
o
o
o
4
p
A
Widzimy więc, że w wyniku działania siły wymuszającej
o postaci (6.28) punkt materialny wykonuje drgania
harmoniczne z pulsacją , tzn. z taką pulsacją, z jaką
zmienia się siła wymuszająca. Amplituda drgań
wymuszonych jest ściśle określona i zależy od amplitudy
siły wymuszającej p
o
oraz od jej pulsacji . Również
początkowa faza drgania
o
zależy od pulsacji .
Gdy siła wymuszająca działa na drgające ciało z
odpowiednią częstotliwością, to amplituda drgań tego
ciała może osiągnąć bardzo dużą wielkość nawet przy
niewielkiej sile wymuszającej. Zjawisko to nazywamy
rezonansem. Przeanalizujemy obecnie wyrażenie (6.32)
na amplitudę
drgań wymuszonych.
o
A
2
2
2
2
2
o
o
o
4
p
A
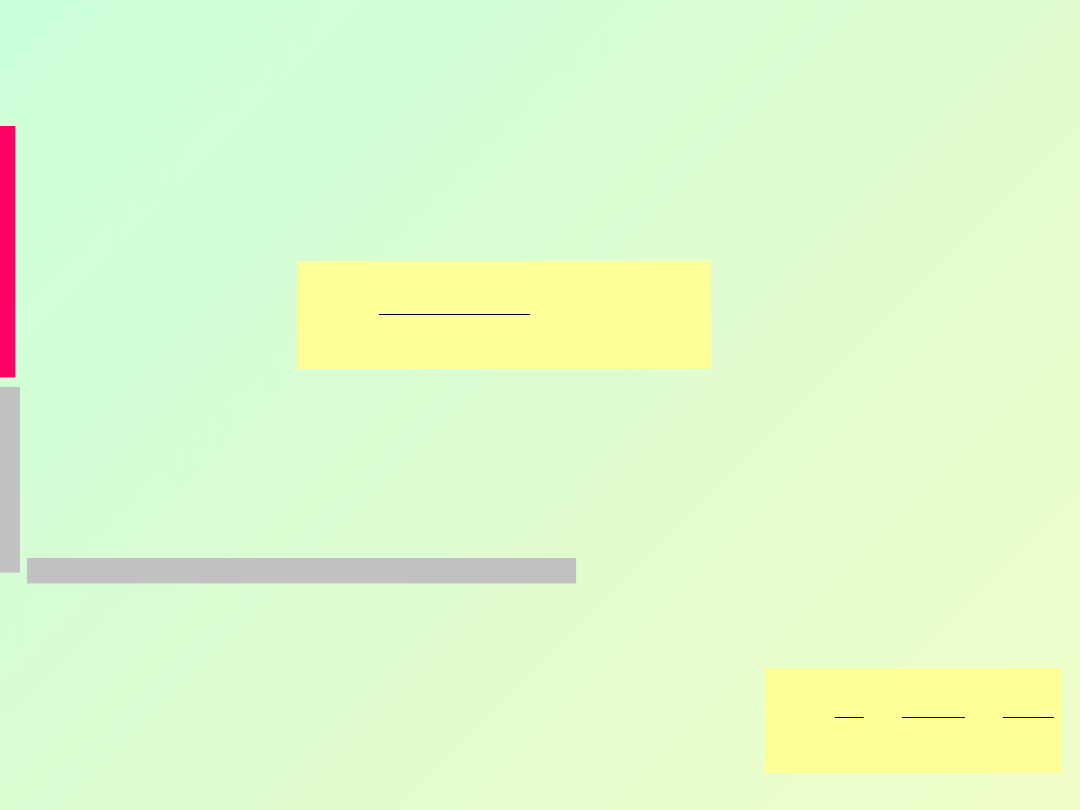
39
A
A
r 1
r 1
r 2
r 3
1
0
= 0
2
3
4
A
r2
A
0
0
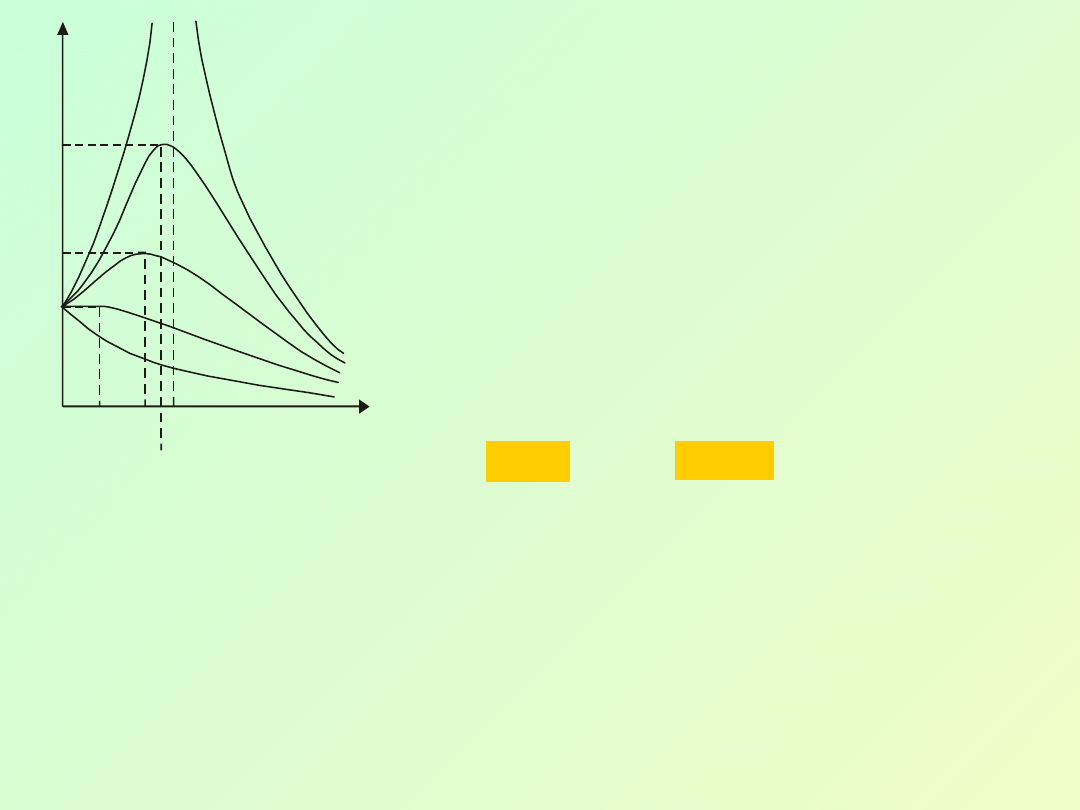
Wykres przedstawiający funkcję
nazywamy krzywą rezonansu. Na rysunku
przedstawiono krzywe rezonansu dla
różnych
wartości
współczynnika
tłumienia . Z rysunku tego wynikają
następujące wnioski:
> Maksymalna wartość amplitudy A
r
jest tym większa, im mniejszy jest
współczynnik tłumienia , a gdy
, to
(patrz
o
na rys.).
o
A
0
r
A
> Jeżeli tłumienie jest słabe (
1
i
2
na rys.6.8) to A
r
osiąga
maksimum, gdy pulsacja przyjmie wartości nieco mniejsze od
pulsacji drgań własnych
o
. Im mniejsza jest wartość , tym bardziej
r
zbliża się do wartości
o
.
> Przy bardzo silnym tłumieniu (
3
i
4
na rys.6.8) rezonans nie
występuje; maksymalna amplituda drgań A
r
jest osiągana, gdy jest
bliskie zera.
40
Wartość pulsacji siły wymuszającej
r
, dla której
amplituda drgań jest maksymalna, nazywa się pulsacją
rezonansową. Odpowiadająca jej amplituda A
r
nazywa
się amplitudą rezonansową.
Wyrażenia na A
r
i
r
można otrzymać ze wzoru (6.32).
Amplituda przyjmuje wartość maksymalną, gdy
wielomian pod pierwiastkiem osiąga minimum.
Obliczając jego pochodną względem i przyrównując ją
do zera, znajdujemy
(6.34)
Podstawiając (6.34) do (6.32), otrzymujemy
(6.35)
2
2
o
r
2
2
2
o
o
r
2
p
A
41
Zjawisko rezonansu jest bardzo rozpowszechnione
w przyrodzie i technice. Skutki rezonansu mogą być
pozytywne lub negatywne. Na przykład, wirujące części
maszyny, jeżeli nie są dokładnie wyważone, wymuszają
drgania innych części maszyny i jeżeli jest spełniony przy
tym warunek rezonansu, to amplituda drgań
wymuszonych może być taka duża, że doprowadzi to do
zniszczenia drgających części.
Ze zjawiskiem rezonansu spotykamy się jadąc np.
autobusem: przy pewnej prędkości obrotów silnika szyby
lub niektóre części karoserii zaczynają silnie drgać.
42
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
Wyszukiwarka
Podobne podstrony:
Egzamin - sciagi, 06. Ruch drgający, 6
Wykł 05 Ruch drgający
Wykł 05 Ruch drgający
06 Wykł 06L Mechanika kwantowaid 6171 ppt
06 Testy korelacjiid 6413 ppt
06 Napięcie powrotneid 6337 ppt
Kurs 05 Ruch drgający
06 Opinie i orzeczeniaid 6347 ppt
Fizyka wykł 7,8 Ruch drgający (M Krasiński)
11 06 11 20id 12326 ppt
06 błąd kotwiczeniaid 6125 ppt
06 Ruch punktu materialnego polu c (2)
06 cwiczenie grafika1id 6272 ppt
06 Zasada Paretoid 6456 ppt
06 E Komputerowe wspomaganieid 6506 ppt
więcej podobnych podstron