
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
Teoria Sterowania
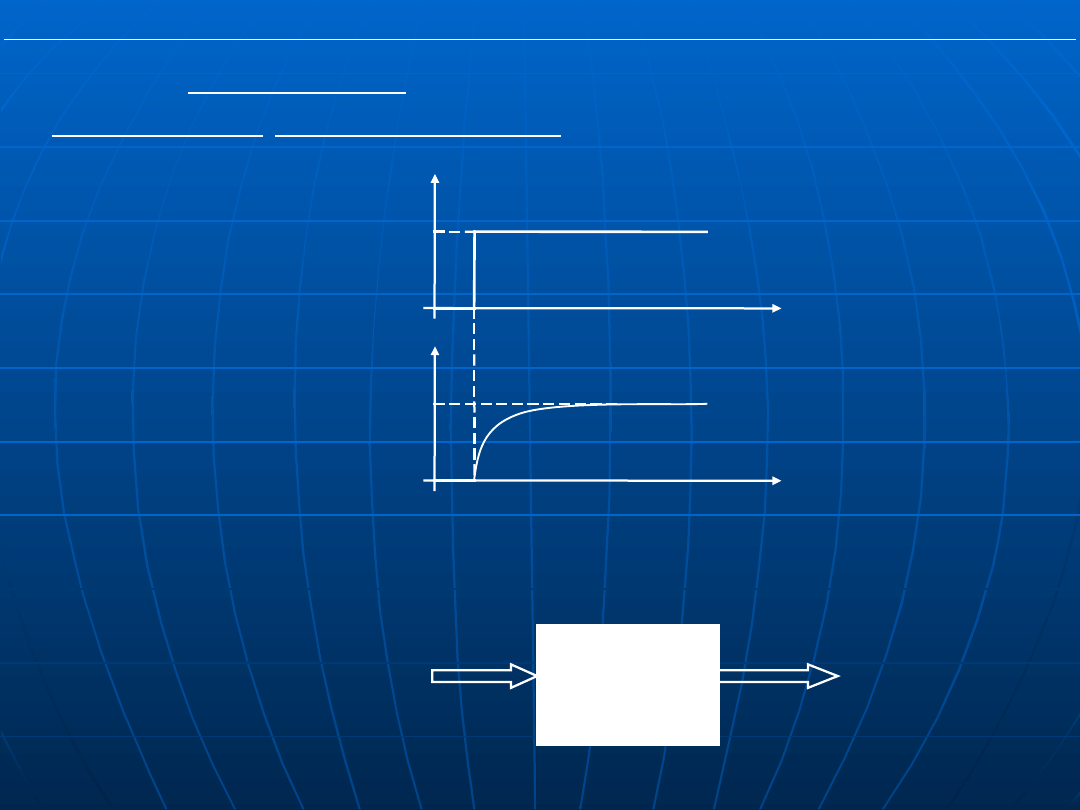
Układy dynamiczne ciągłe – opisywane zwykle
równaniami różniczkowymi. Charakteryzują się
występowaniem procesów przejściowych.
t
t
P
in
Θ
K·P
in
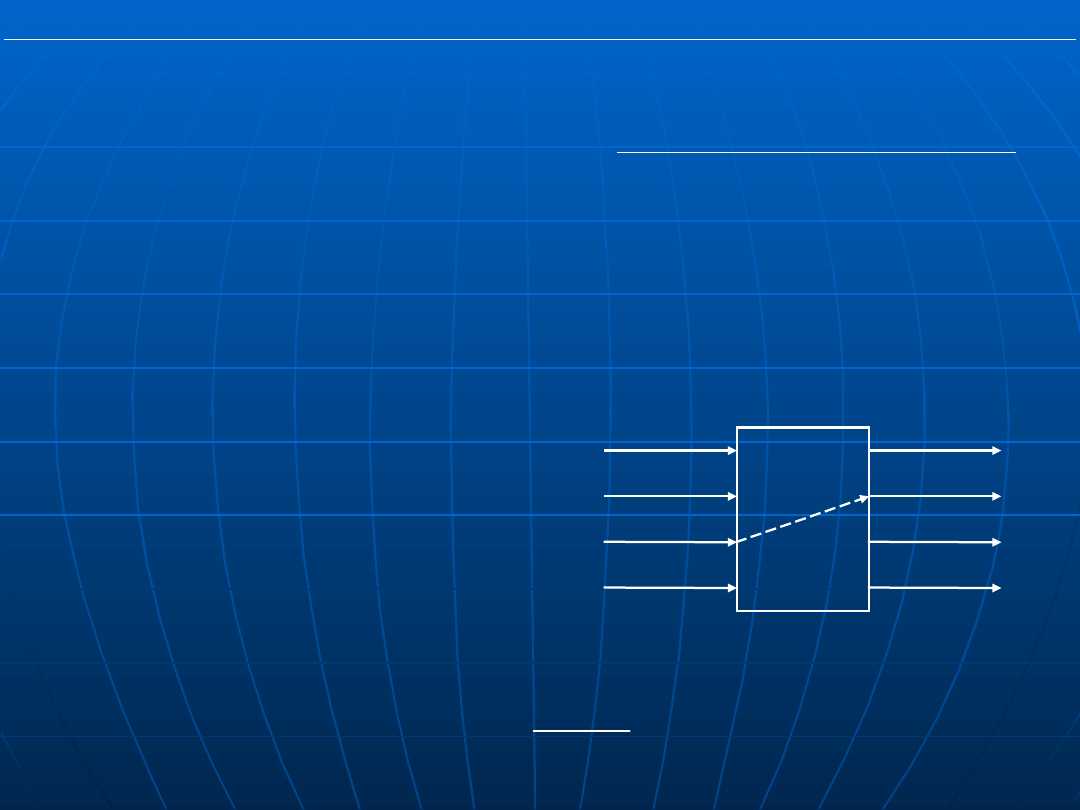
1) Opis za pomocą zmiennych stanu (wektora stanu)
n
x
x
x
2
1
x
t
u
t
y
( , )
=
x f x u
&

Teoria Sterowania
Teoria Sterowania
u
x
g
y
u
x
f
x
,
,
układ n równań pierwszego rzędu
algebraiczne
równania wyjścia
p
n
n
n
p
n
p
n
u
u
u
x
x
x
f
x
u
u
u
x
x
x
f
x
u
u
u
x
x
x
f
x
,...
,
;
,...
,
,...
,
;
,...
,
,...
,
;
,...
,
2
1
2
1
2
1
2
1
2
2
2
1
2
1
1
1
p
n
l
l
p
n
p
n
u
u
u
x
x
x
g
y
u
u
u
x
x
x
g
y
u
u
u
x
x
x
g
y
,...
,
;
,...
,
,...
,
;
,...
,
,...
,
;
,...
,
2
1
2
1
2
1
2
1
2
2
2
1
2
1
1
1
u
x
u
x
u
x
f
,
,
,
1
n
f
f
gdzie
Teoria Sterowania
Teoria Sterowania
Wybór zmiennych stanu dla danego układu może być różny.
Zwraca się uwagę na:
a) sens fizyczny i mierzalność zmiennych lub
b) wygodę opisu matematycznego.
Model liniowy
Du
Cx
y
Bu
Ax
x
p
l
n
l
p
n
n
n
D
C
B
A
;
;
;
Przykład: Napisać równania stanu dla
33
32
31
23
22
21
13
12
11
a
a
a
a
a
a
a
a
a
A
32
31
22
21
12
11
b
b
b
b
b
b
B
13
12
11
c
c
c
C
Wymiary macierzy (n nazywamy rzędem
układu):
Teoria Sterowania
Teoria Sterowania
t
u
t
y
C
D
A
B
( )
t
x
( )
t
x&
A – macierz stanu,
B – macierz wejścia,
C – macierz wyjścia,
D – macierz transmisyjna
Macierze zawierają stałe współczynniki dynamiczne
układu.
Teoria Sterowania
Teoria Sterowania
Macierz transmitancji:
)
(
)
(
)
(
)
(
)
(
1
1
11
s
G
s
G
s
G
s
G
s
lp
l
p
G
Transmitancja G
ij
(s) od j-tego wejścia do i-tego wyjścia
u
j
y
i
G
ij
(s)
( )
( )
( )
i
ij
j
Y s
G s
U s
=
Równania operatorowe dla liniowego układu wielowymiarowego
(
p wejść, l wyjść
):
1
1
( )
( )
( )
( )
( ) (
)
( )
( )
( )
( )
( )
(
)
( )
l p
s
s s
s
s
s
s
s
s
s
s
s
s
s
�
-
-
=
+
�
=
-
=
+
�
�
=
-
+
�
�
G
X
AX
BU
X
I A BU
Y
CX
DU
Y
C I A B D U
1 4 442 4 4 43
Przejście od równań stanu do
transmitancji
Teoria Sterowania
Teoria Sterowania
Przejście od transmitancji do równań
stanu
Jest to operacja o wyniku zależnym od wyboru zmiennych stanu.
Dzieląc licznik i mianownik transmitancji przez a
n
uzyskuje się
współczynnik =1 przy s
n
. Jeżeli w G(s) n=m, to dzieli się
wielomian licznika przez wielomian mianownika otrzymując
sumę współczynnika wzmocnienia K i transmitancji właściwej:
1
0
1
1
1
0
1
0
1
0
1
1
1
0
( )
( )
...
( )
( )
( )
- transmitancja właściwa,
( )
( )
...
( )
...
( )
( ) ...
( )
( )
( )
( )
1
( )
( )
...
w
m
m
w
n
n
n
m
m
m
m
n
n
n
n
G s
K G s
b s
bs b
Y s X s
G s
n>m
X s U s
s
a s
a s a
Y s
b s
bs b
Y s
b s X s
bsX s b X s
X s
X s
s X s
a s
U s
s
a s a
-
-
-
-
= +
+ + +
=
�
=
+
+ +
+
=
+ + + �
=
+ +
+
=
�
=-
+ +
+
1
0
( ) ...
( )
( )
( )
X s
a sX s a X s U s
- -
-
+
Teoria Sterowania
Teoria Sterowania
0
1
2
1
0
1
0
0
0
0
1
0
0
0
0
1
n
n
a
a
a
a
-
-
�
�
�
�
�
�
�
�
=
�
�
�
�
�
�
-
-
-
-
�
�
A
L
L
M
O
O
M
L
[
]
0
1
m
b b
b
=
B
L
0
0
1
��
��
��
=
��
��
��
C
M
[ ]
K
=
D
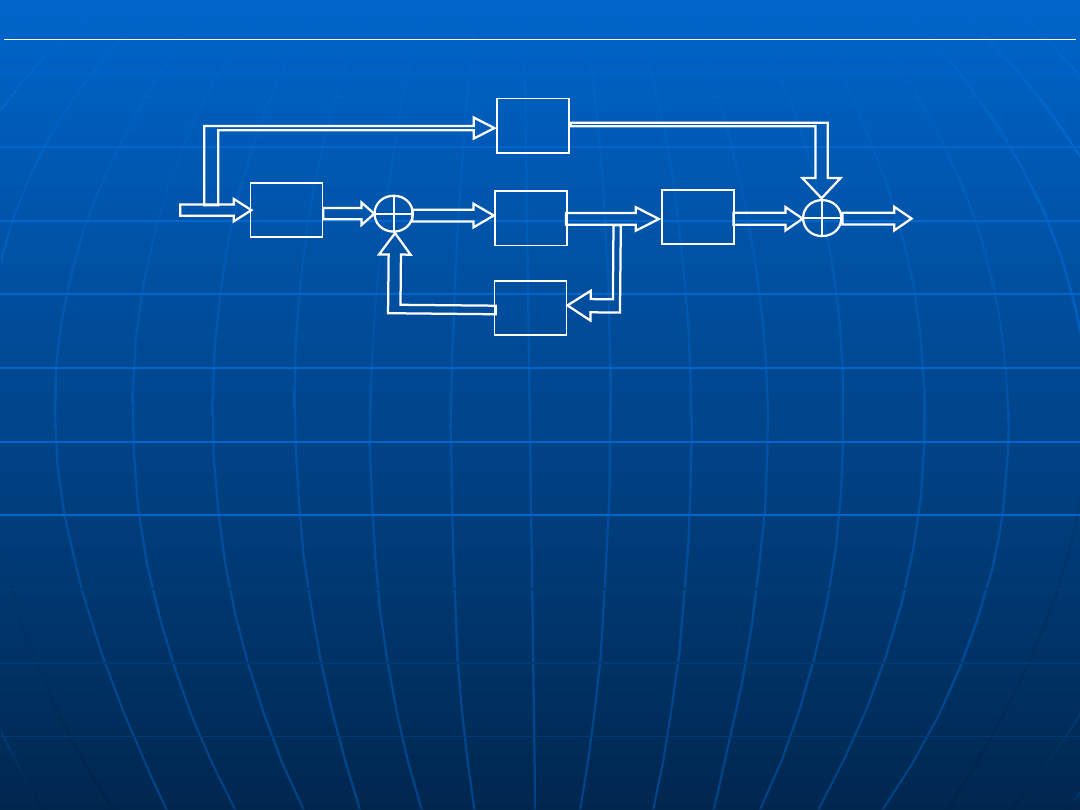
Przykład schematu dla
n=3:
2
2
1
0
3
2
2
1
0
( )
b s
bs b
G s
K
s
a s
a s a
+ +
= +
+
+
+
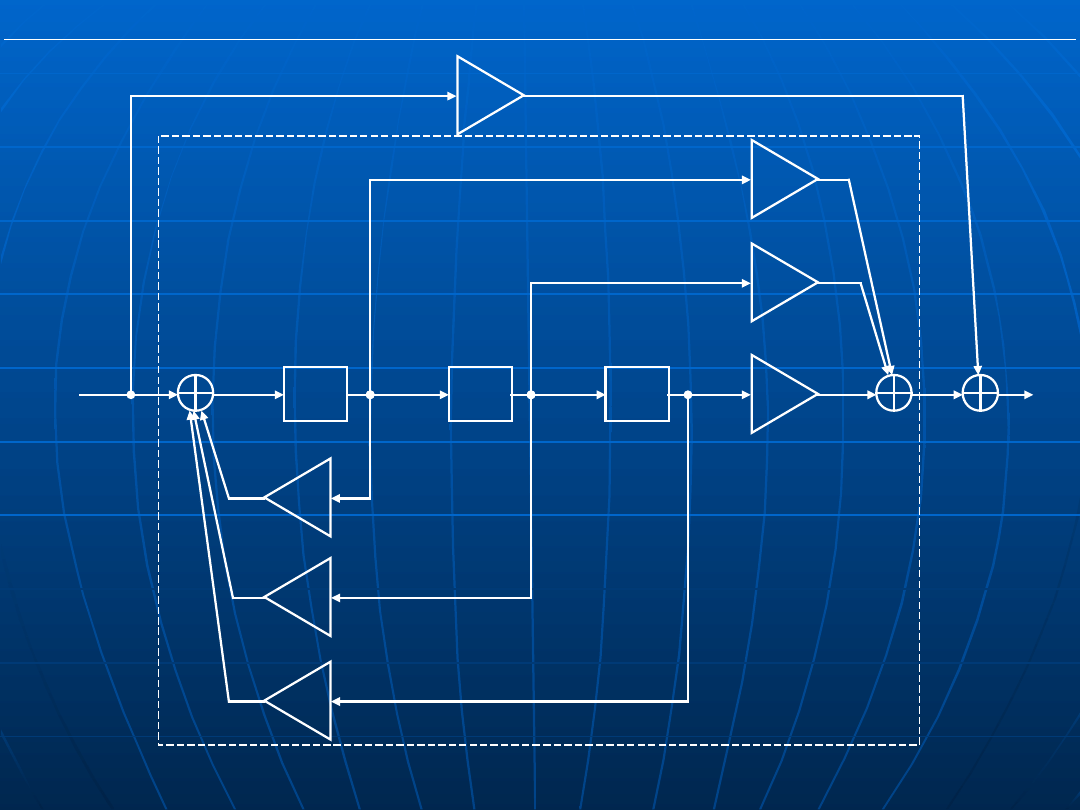
Teoria Sterowania
Teoria Sterowania
b
0
-
a
2
b
1
b
2
-a
1
-a
0
1
x x
=
y
2
x x
=
&
3
x x
=
&&
3
x x
=
&&& &
( )
X s
( )
sX s
2
( )
s X s
3
( )
s X s
u
( )
U s
( )
Y s
K
Teoria Sterowania
Teoria Sterowania
Document Outline
Wyszukiwarka
Podobne podstrony:
wykresy rown stanu ciecze
Spoleczno ekonomiczne uwarunkowania somatyczne stanu zdrowia ludnosci Polski
wyk13 Rown Maxwella
Ocena stanu czystosci wod Zalewu Szczecinskiego ppt
Najbardziej charakterystyczne odchylenia od stanu prawidłowego w badaniu
ocena stanu odżywienia
mgr cw 2 symulacja zmian stanu zasobów 2010
Inf przestrz wekt uklady rown
pytanie 71 Tryb Stanu, Politologia UW- III semestr, System polityczny rp
6 1 dokumentacja rejestry, BHP dokumenty, ANALIZA STANU BHP
Szczególna ochrona stanu zdrowia pracowników młodocianych
rownanie stanu
Czy montaż ścianki działowej na poddaszu wymaga ekpertyzy dotyczącej stanu technicznego
Metody oceny stanu betonu w konstrukcji po pożarze
03 diagnoza stanu wyjsciowego
cwiczenie 5 Funkcja naprężeń Airy'ego dla plaskiego stanu naprężenia
więcej podobnych podstron