
XIV. STEROWANIE
XIV. STEROWANIE
OPTYMALNE
OPTYMALNE
14.1. Zadania optymalizacji
14.1. Zadania optymalizacji
Sterowanie optymalne polega na szukaniu minimum lub maksimum:
- wielkości wyjściowej obiektu
lub jej funkcji
funkcji
(optymalizacja statyczna)
-
funkcjonału
funkcjonału
jako całki z funkcji (optymalizacja dynamiczna).
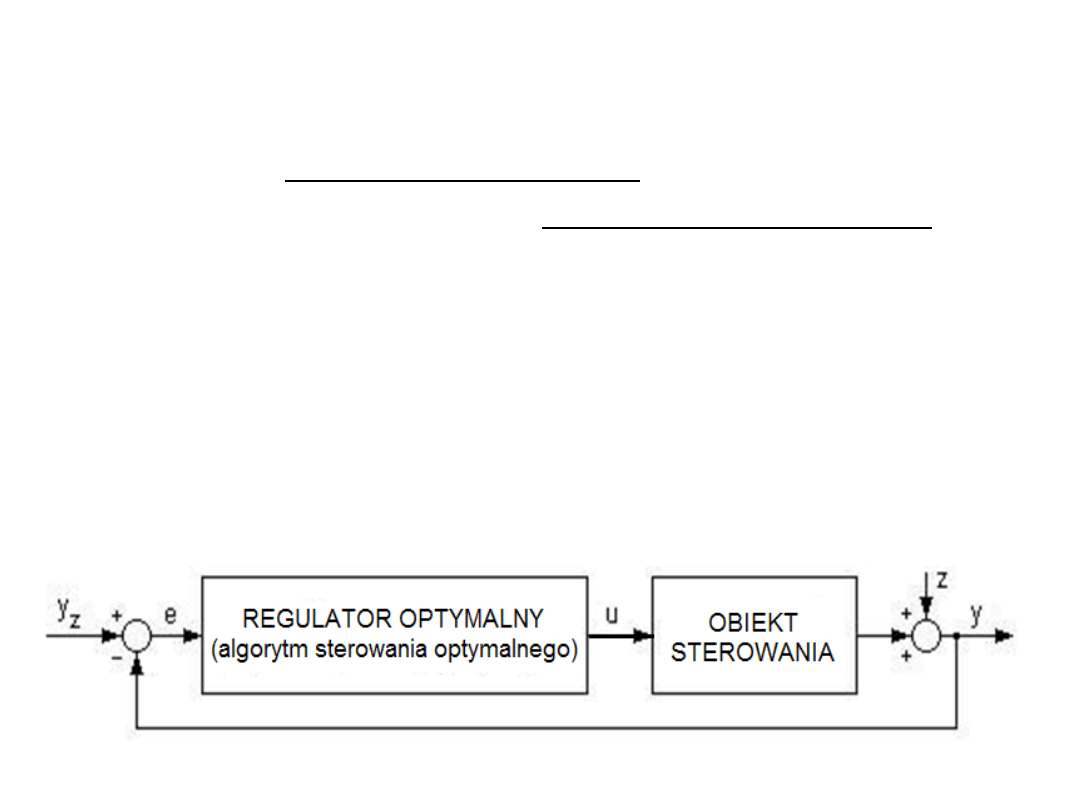
Sterowanie optymalne obiektem lub procesem technologicznym jest
realizowane w układzie zamkniętym przez regulator optymalny lub
algorytm sterowania optymalnego zapisany w pamięci
mikroprocesorowego sterownika programowalnego PLC
(Programmable Logic Controller):
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
2
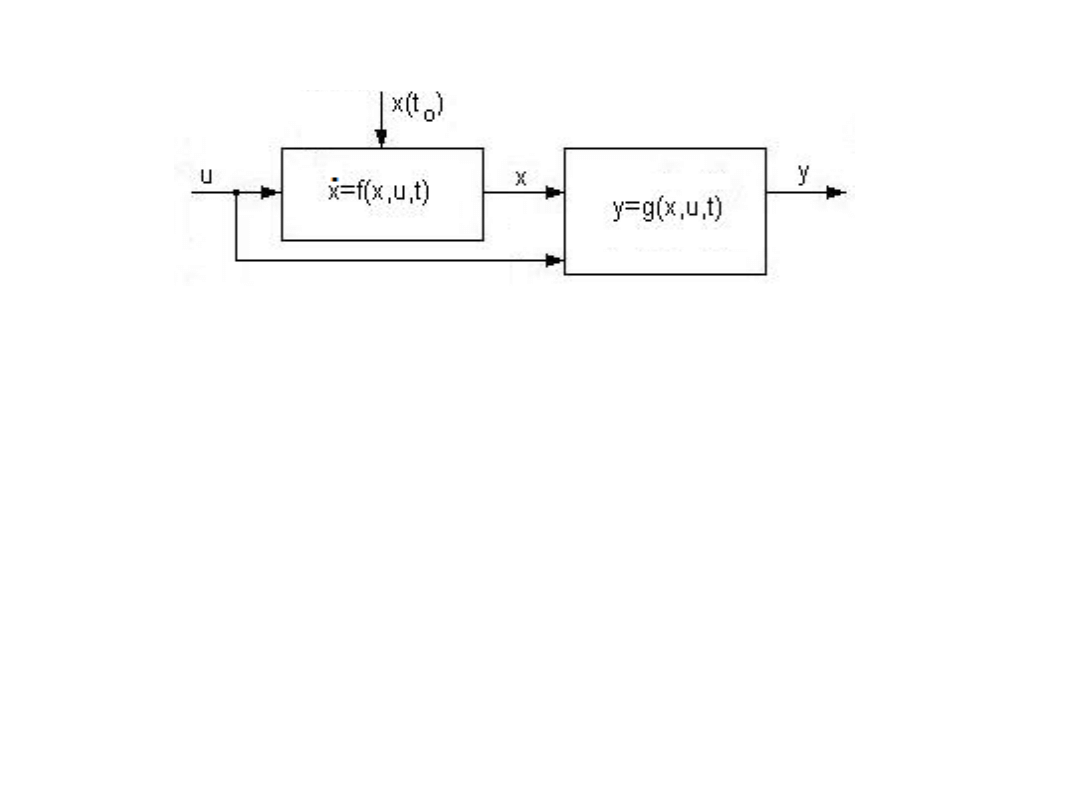
Obiekt lub proces sterowania opisany jest równaniami stanu i wyjścia:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
3
Przy syntezie regulatora optymalnego lub algorytmu sterowania
optymalnego wykorzystuje się różne metody optymalizacji.
Zadania optymalizacji dzieli się na:
•
optymalizację statyczną
optymalizację statyczną
, formułując zadanie jako
programowanie liniowe,
programowanie nieliniowe, np. kwadratowe,
•
optymalizację dynamiczną
optymalizację dynamiczną
, stosując
metodę wariacyjną wykorzystującą równanie Eulera-
Lagrange’a,
zasadę maksimum Pontriagina,
zasadę optymalności Bellmana w postaci programowania
dynamicznego.

14.2. Optymalizacja statyczna
14.2. Optymalizacja statyczna
Sformułowanie zadania optymalizacji
statycznej
Zadanie optymalizacji statycznej można
sformułować jako znalezienie takiej optymalnej
wartości zmiennej x*, która minimalizuje lub
maksymalizuje funkcję celu sterowania jako
wskaźnika jakości sterowania optymalnego:
spełniając równocześnie układ ograniczeń:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
4
m
,...,
2
,
1
i
b
x
g
i
i
F = f(x) dla x = x
1
,
x
2
, ..., x
n
Rodzaje zadań optymalizacji
statycznej
Programowanie liniowe
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
5
n
1
j
j
j
n
1
x
c
x
,...,
x
f
F
0
x
m
,...,
2
,
1
i
b
x
a
x
,...,
x
g
j
i
j
n
1
j
ij
n
1
2) F – funkcja celu sterowania nieliniowa,
g – ograniczenia liniowe:
• F jako funkcja addytywna
• F jako suma formy liniowej i kwadratowej stanowiąc
zadanie programowania kwadratowego:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
6
m
1
i
n
1
j
j
i
ij
n
1
j
j
j
n
1
x
x
d
x
c
x
,...,
x
f
F
3) F – funkcja celu sterowania nieliniowa,
g – ograniczenia nieliniowe:
m
,...,
1
i
x
g
...
x
g
x
g
x
,...,
x
g
n
in
2
2
i
1
1
i
n
1
i
Programowanie nieliniowe
1) F – funkcja celu sterowania nieliniowa,
g – ograniczenia nieliniowe równościowe:
jako klasyczny problem optymalizacji
rozwiązywany metodą Lagrange’a
metodą Lagrange’a
.
i
i
b
x
g
n
n
2
2
1
1
n
1
x
f
...
x
f
x
f
x
,...,
x
f
F
Metody rozwiązywania zadań optymalizacji
statycznej
Metody analityczne
Klasyczne problemy optymalizacji statycznej
rozwiązywane są następującymi metodami
analitycznymi:
Metoda Lagrange’a
Metoda Lagrange’a
optymalizacji z ograniczeniami
równościowymi
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
7
i
i
n
2
1
b
x
g
x
,...,
x
,
x
f
F
Funkcja Lagrange’a:
m
1
i
i
i
i
x
g
b
x
f
,
x
L
gdzie wyrażenie pod oznacza funkcję kary za
przekroczenie ograniczeń.
Lagrange Joseph
Louis (1736-1813)
Matematyk włoski.
Warunek konieczny optimum :
W celu wyznaczenia optymalnych wartości x
*
należy
rozwiązać (m+n) równań z n niewiadomymi x
j
oraz z m
niewiadomymi
j
.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
8
m
,..,
1
i
0
,
x
L
n
,..,
1
j
0
x
,
x
L
i
j
0
i
Metoda Kuhna i Tuckera
Metoda Kuhna i Tuckera
z ograniczeniami
nierównościowymi
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
9
m
1
i
i
i
i
x
g
b
x
f
L
0
L
0
x
L
x
0
L
0
x
L
i
i
j
j
i
j
0
x
j
0
i
j =1,..., n i
=1,..., m
Kuhn Harold William
(ur. 1925)
Amerykański matematyk.
Tucker Albert William
(1905-1995)
Amerykański matematyk.
i
i
b
x
g
Metody numeryczne
Metoda programowania liniowego SIMPLEX
Metoda programowania liniowego SIMPLEX
z zastosowaniem:
- do planowania produkcji (optymalne obciążenie sprzętu,
optymalny asortyment produkcji)
- do sporządzania mieszanek (stopy metali, diety, racjonalne cięcie
materiałów w stoczni lub fabryce odzieżowej, produkty
rafineryjne)
- w transporcie (optymalny plan przewozów, optymalizacja drogi
statku, optymalny manewr antykolizyjny).
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
10
m
n
mn
2
2
m
1
1
m
2
n
n
2
2
22
1
21
1
n
n
1
2
12
1
11
j
n
1
j
ij
j
j
2
2
1
1
b
x
a
...
x
a
x
a
b
x
a
...
x
a
x
a
b
x
a
...
x
a
x
a
x
a
x
g
x
c
...
x
c
x
c
x
f
F
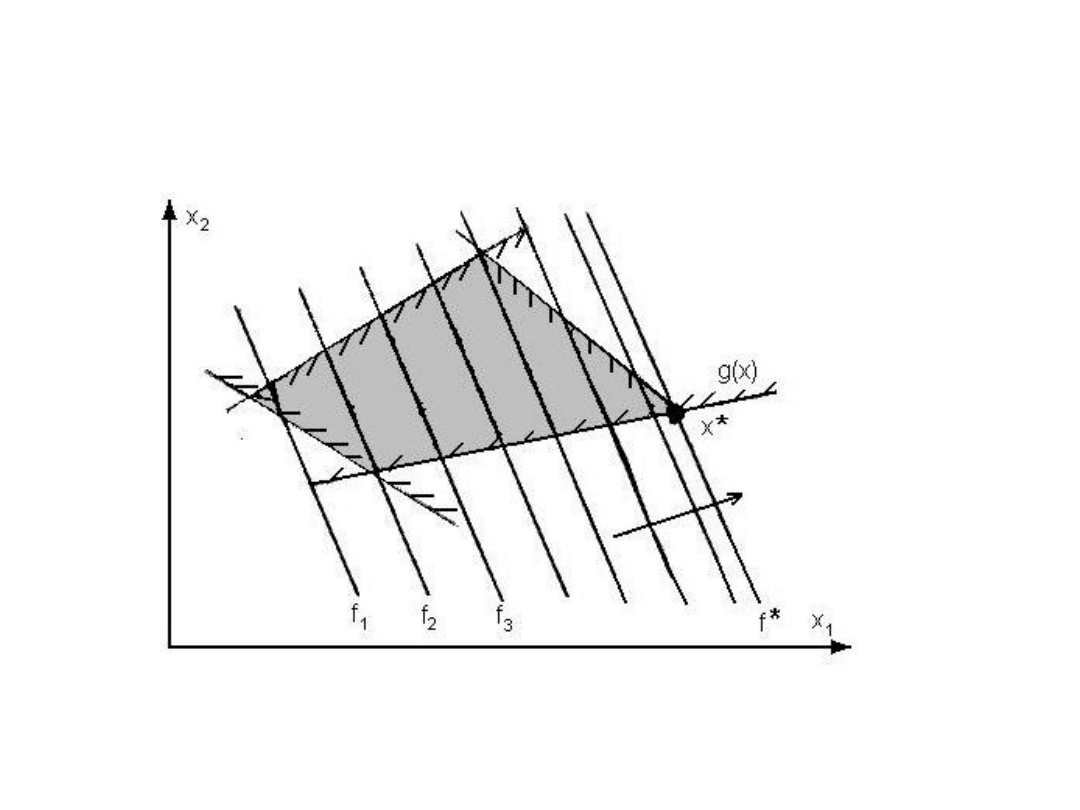
Graficzna prezentacja znajdowania optymalnego
rozwiązania metodą programowania liniowego:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
11

Metoda programowania kwadratowego
Metoda programowania kwadratowego
Wolfe’a
Metody bezgradientowe
Metody bezgradientowe
minimalizacji funkcji wielu
zmiennych bez ograniczeń: Rosenbrocka, Neldera i
Meada, Powella
Metody gradientowe
Metody gradientowe
minimalizacji funkcji wielu
zmiennych bez ograniczeń: największego spadku,
gradientu sprzężonego, Davidona
Metody funkcji kary
Metody funkcji kary
poszukiwania ekstremum funkcji celu
sterowania z ograniczeniami nierównościowymi przez
wprowadzenie: Rosenbrocka, Carolla, Powella.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
12
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
13
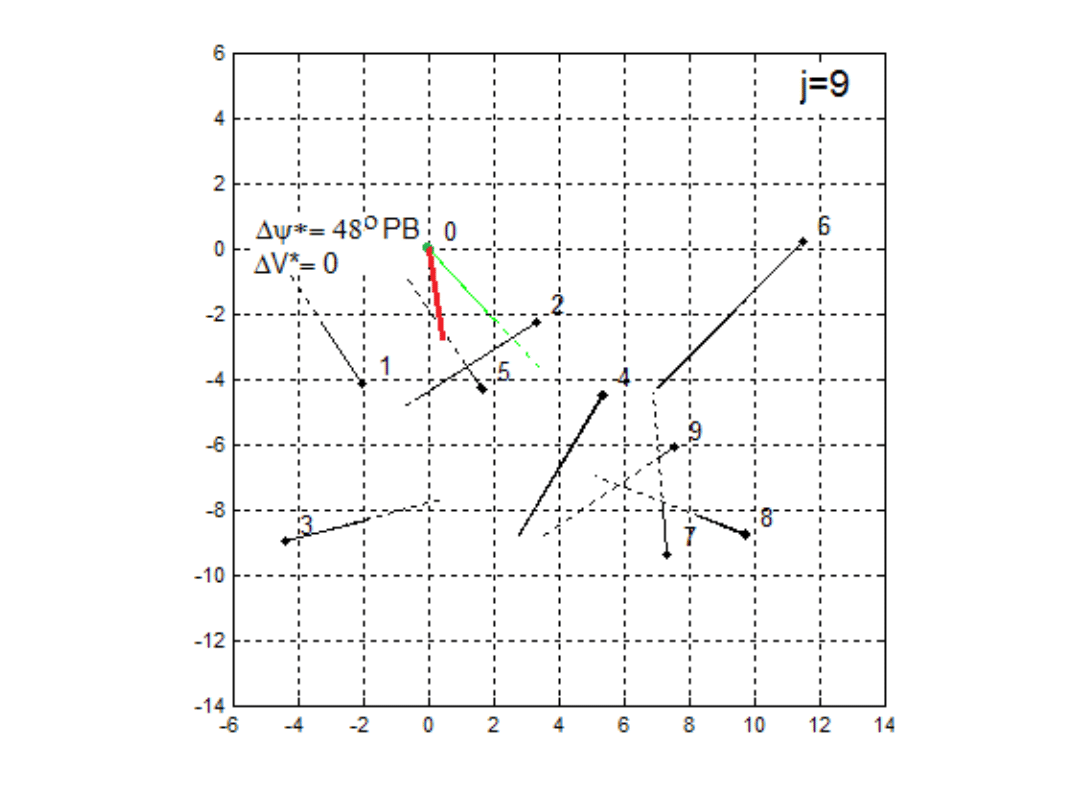
W sytuacjach mijania się własnego statku ze spotkanym
obiektem istnieje nieskończenie wiele możliwych
manewrów zmianą kursu lub/i zmianą prędkości, z których
wybiera się rozwiązanie spełniające warunki optymalności.
Każdemu manewrowi przyporządkowuje się koszt uniknięcia
kolizji i wykorzystuje się sterowanie optymalne
minimalizujące ten koszt.
Można rozważać następujące kryteria optymalnego
manewru:
- straty drogi na wymijanie spotkanych statków
- odchylenie od zadanej trasy rejsu
- zużycie paliwa.
Przykład
Przykład
Wyznaczanie optymalnego manewru antykolizyjnego
Wyznaczanie optymalnego manewru antykolizyjnego
statkiem metodą programowania liniowego
statkiem metodą programowania liniowego
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
14
Ponadto przy wyborze sterowania należy uwzględnić
przepisy MPDM (Międzynarodowe Prawo Drogi
Morskiej) oraz nawodne i podwodne ograniczenia
nawigacyjne.
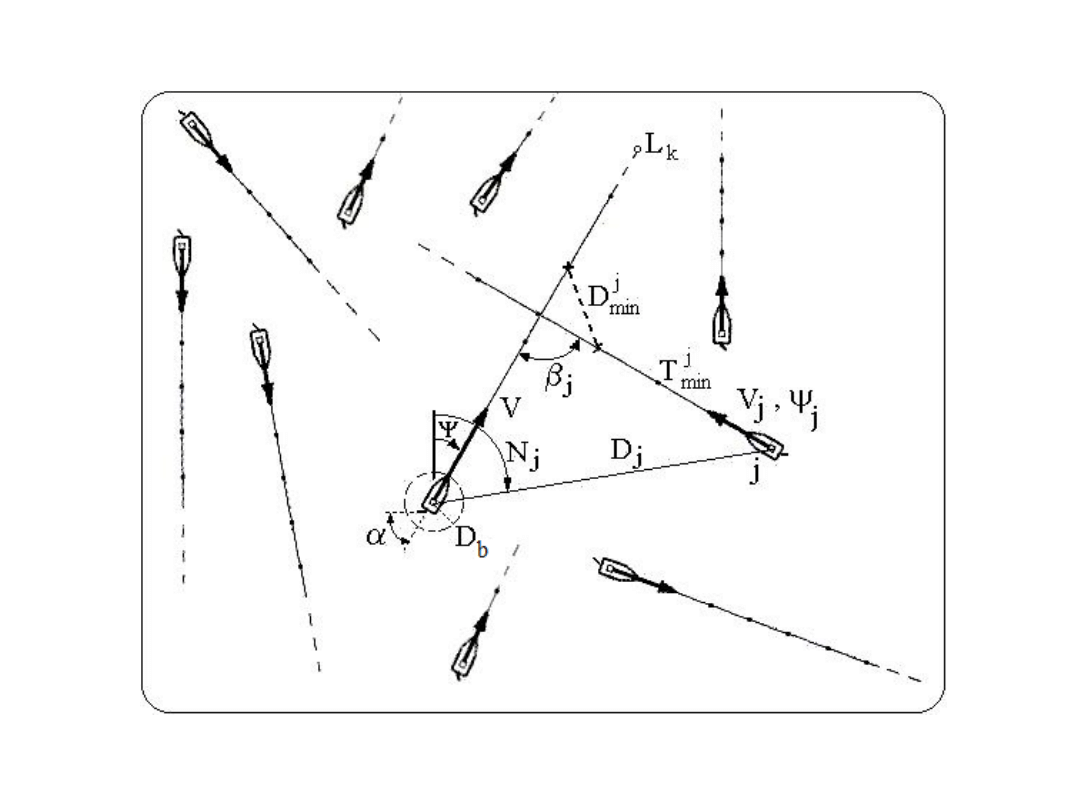
Charakter zapobiegania kolizjom statków wymaga
spełnienia podstawowego warunku:
b
j
min
D
D
j
min
D
-
najmniejsza odległość zbliżenia z j-tym
spotkanym statkiem, oceniona przez
radarowy system antykolizyjny ARPA
- bezpieczna odległość mijania w danych
warunkach widzialności na morzu, określana
przez nawigatora
b
D
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
15
Zakładając ruch prostoliniowy i jednostajny
statków, zadanie wyznaczenia optymalnego
manewru bezpiecznego w stosunku do
wszystkich j-tych spotkanych statków można
sprowadzić do obliczenia optymalnych wartości
kursu
*
i prędkości V
*
własnego statku ze
statycznego zbioru ich dopuszczalnych wartości
w układzie współrzędnych (x
1
, x
2
).
Uwzględnienie dynamiki własnego statku
możliwe jest poprzez obliczenie i realizację
manewru z czasem wyprzedzenia t
w
.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
16
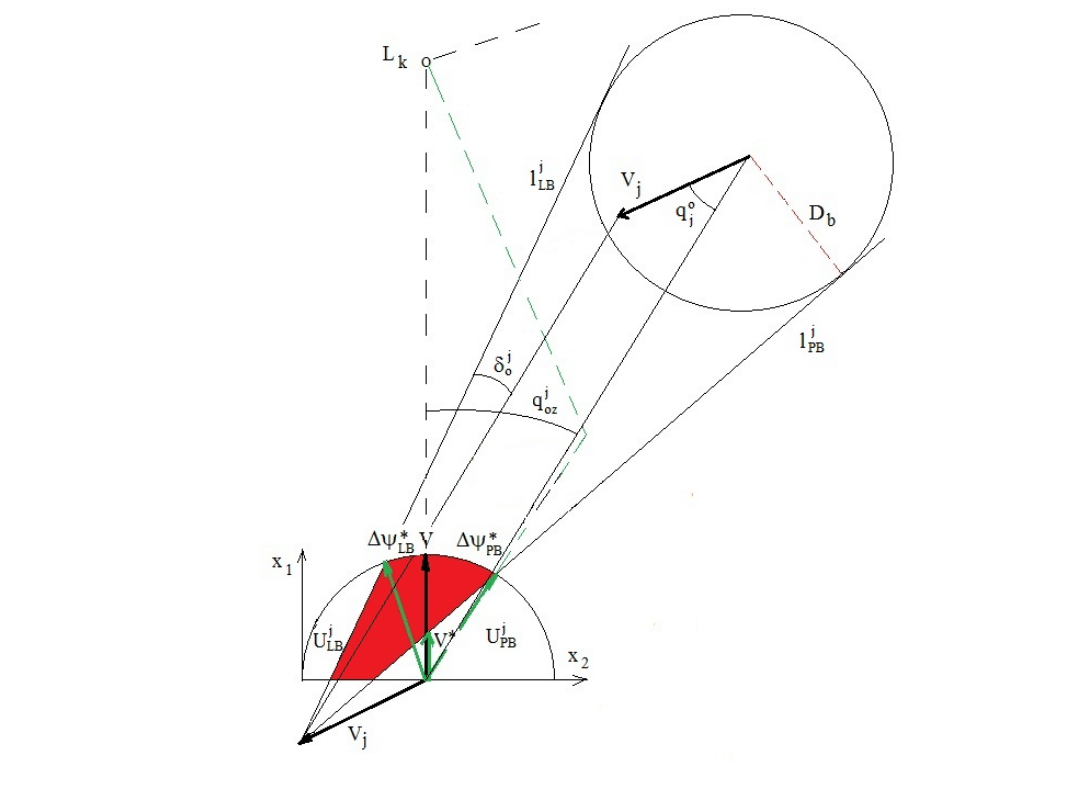
Obszar zabronionych manewrów
w stosunku
do jednego spotkanego obiektu
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
17
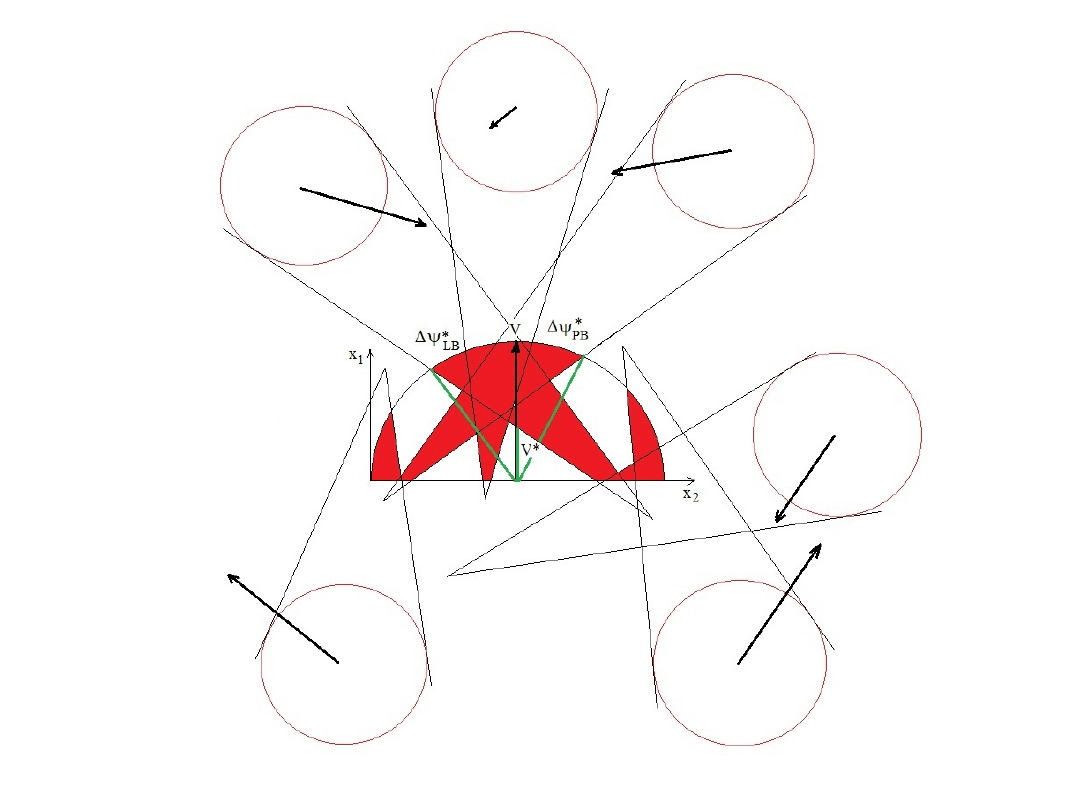
Obszar zabronionych
manewrów w
stosunku
do sześciu
spotkanych statków
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
18
Uwzględnienie reguł MPDM możliwe jest poprzez
odpowiedni wybór manewru ze zbioru:
Przedstawienie reguł MPDM w postaci odpowiednich
diagramów manewrowych opracowanych przez A.G.
Corbet, S.H. Hollingdale, E.S. Calvert i K.D. Jones
umożliwia sformułowanie pewnej funkcji logicznej Z
j
jako semantycznej interpretacji reguł MPDM.
Każdy rodzaj sytuacji zbliżenia statków jest opisany
zmiennymi logicznymi: A, B, C, D, E przyjmującymi
wartość 0 lub 1.
j
PB
j
LB
j
o
U
U
U
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
19
A – spotkanie statku z dziobu lub z innego kierunku
B – zbliżanie się lub oddalanie spotkanego statku
C – mijanie się ze spotkanym statkiem z dziobu lub rufy
D – zbliżanie się spotkanego statku z dziobu lub z rufy
E – zbliżanie się spotkanego statku z PB lub LB
Zastosowanie tablicy Karnaugh’a prowadzi do minimalizacji funkcji
logicznej Z
j
do postaci:
Wartość funkcji Z
j
określa dla każdego spotkanego statku wybór
manewru na PB lub LB zależnie od reguł MPDM.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
20
Do wyznaczenia optymalnego manewru własnego statku w łącznym do wszystkich j
spotkanych statków dopuszczalnym obszarze sterowań:
można wykorzystać zasadę programowania liniowego, dającą się sformułować
następująco:
należy wyznaczyć składowe odpowiadające
i zapewniające maksymalny rzut wektora prędkości własnego statku na zadany kurs:
przy ograniczeniach:
*
2
*
1
x
,
x
*
V
*,
0
x
,
0
x
2
1
m
...,
,
2
,
1
i
,
b
x
a
x
a
i
2
2
i
1
1
i
max x
1
m
1
j
j
o
o
m
...,
,
2
,
1
j
U
U
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
21
Pierwsze 7 ograniczeń wynika z liniowej aproksymacji
okręgu o promieniu V z dokładnością 1%, następne pary
ograniczeń przyporządkowane są liniom stycznym
do okręgu o promieniu D
b
odpowiednio z LB i PB.
Przy czym wartości współczynników ograniczeń wynoszą
dla
j-tego obiektu:
gdzie: Z
j
= -1 dla podzbioru U
LB
Z
j
= +1 dla podzbioru U
PB
j
PB
j
LB
l
i
l
j
o
j
j
oz
j
1
,i
7
Z
q
cos
Z
a
j
o
j
j
oz
j
2
,
i
7
Z
q
sin
Z
a
j
o
j
j
oz
j
o
j
o
j
j
i
7
Z
q
cos
V
Z
q
sin
Z
b

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
22
Wartości kątów są jednoznaczną funkcją
parametrów ruchu j-tego spotkanego statku:
-prędkości V
j
-kursu
j
-namiaru N
j
-odległości D
j
otrzymywanych z radarowego systemu antykolizyjnego
ARPA podczas automatycznego śledzenia
ech statków na
ekranie radaru.
j
o
o
j
j
oz
,
q
,
q

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
23
Algorytm wyznaczania optymalnego bezpiecznego
manewru statkiem zawiera:
- biblioteczną procedurę programowania liniowego w
Optimization Toolbox MATLAB/SIMULINK
- procedurę reguł MPDM wyznaczającą wartość funkcji
logicznej Z
j
procedurę szeregowania spotkanych obiektów
według wartości ryzyka kolizji.
Rezultatem obliczeń są wartości:
-optymalnej prędkości V
*
i optymalnego kursu
*
własnego
statku, zapewniających mijanie spotkanych statków w
bezpiecznej odległości D
b
-najmniejszych odległości mijania i czasu po
manewrze optymalnym w stosunku do każdego
śledzonego
j-tego spotkanego statku.
j
min
D
j
min
T
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
24
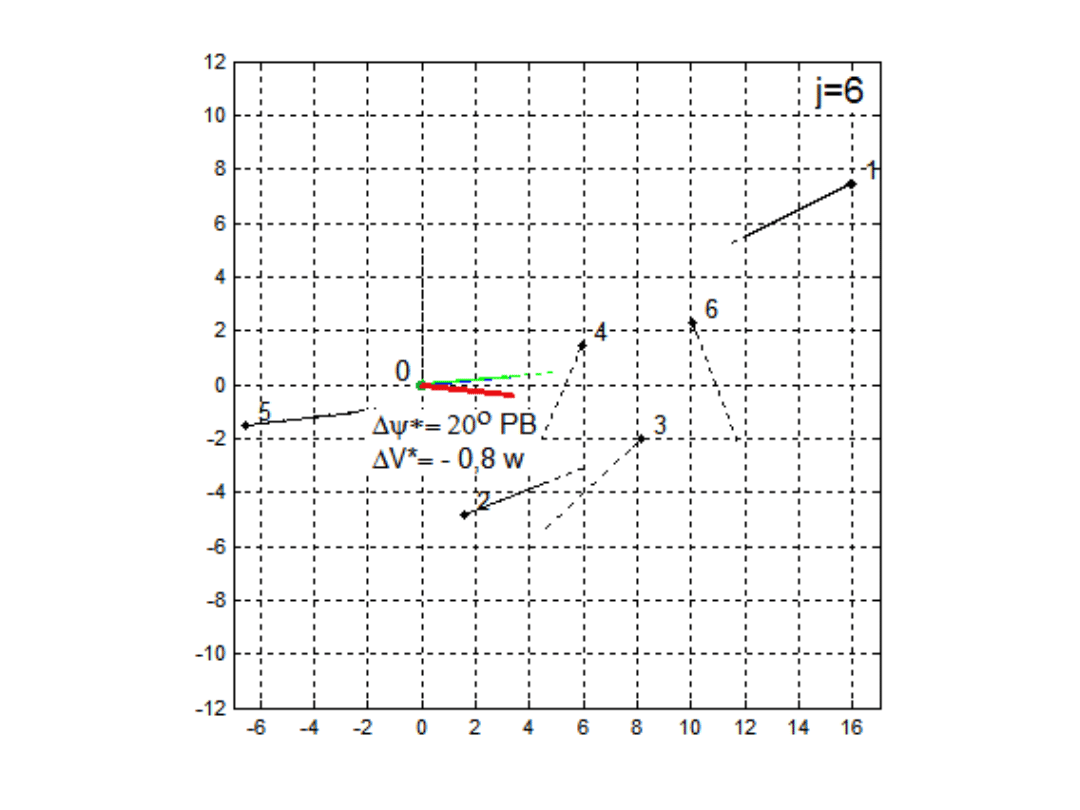
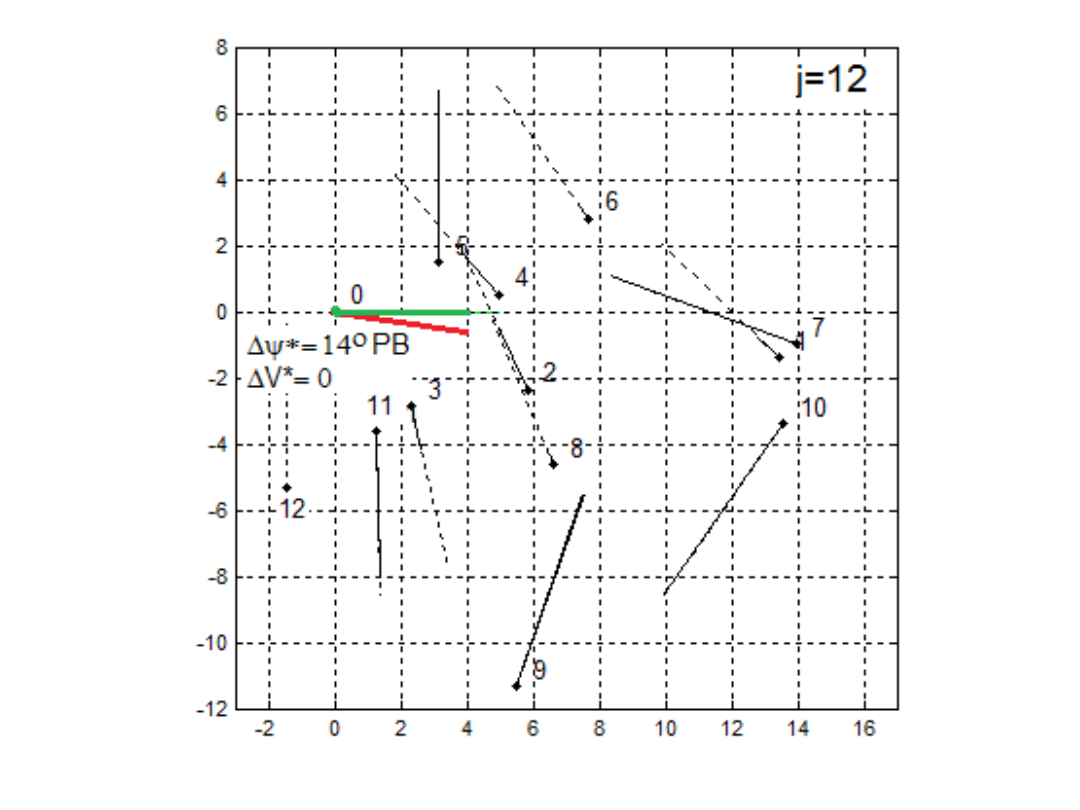
Wyniki obliczeń
optymalnego manewru
bezpiecznego
własnego statku
w sytuacjach
mijania się z:
j=6, j=9, j=12
spotkanymi statkami
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
25
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
26
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
27
14.3. Optymalizacja
14.3. Optymalizacja
dynamiczna
dynamiczna
Metoda wariacyjna
Dane jest równanie stanu:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
28
t
,
u
,
x
f
x
oraz wskaźnik jakości
sterowania:
k
o
t
t
o
dt
t
,
u
,
x
f
I
przy: x(t
o
) = x
o
, x(t
k
)
= x
k
Rozróżnia się zadania z określonym stanem końcowym
oraz ze swobodnym stanem końcowym.
Warunek konieczny istnienia ekstremum wskaźnika
jakości dany jest w postaci równania
Eulera-Lagrange’a
:
0
u
f
u
f
dt
d
u
f
x
f
u
f
u
f
x
f
o
o
o
przy warunku końcowym:
0
u
f
u
f
k
t
t
o
Euler Leonhard
(1707-1783)
Matematyk i
fizyk
szwajcarski.
Jeżeli:
to równanie Eulera-Lagrange’a przyjmie postać:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
29
k
o
t
t
o
dt
t
,
x
,
x
f
I
0
f
dt
d
f
'
ox
'
ox
przy warunku
0
f
k
t
t
'
ox
Jeżeli punkt końcowy leży na krzywej x = g(t) to warunek
końcowy nazywa się warunkiem transwersalności i
wyrażony jest przez zależność:
k
t
t
'
x
o
k
o
f
t
g
t
x
t
f
Zasada maksimum
Pontriagina
Wprowadza się pomocniczą
funkcję H zwaną hamiltonianem:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
30
t
,
u
,
x
f
t
,
u
,
x
f
t
,
,
u
,
x
H
n
1
i
i
i
o
gdzie: - zmienna sprzężona
i
Hamiltonian rozszerzony:
t
S
t
,
x
H
u
,
x
,
H
~
t
t
Zmienne sprzężone stanowią
rozwiązanie równań
różniczkowych:
H
dt
dx
x
H
dt
d
Pontriagin Lew
(1908-1988)
Matematyk
rosyjski.
W wieku 14 lat w
wyniku wypadku
stracił wzrok.
Według zasady maksimum sterowanie optymalne u*(t)
minimalizujące wskaźnik jakości sterowania:
maksymalizuje hamiltonian:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
31
dt
t
,
u
,
x
f
I
o
o
t
,
u
,
,
x
H
max
t
,
u
,
,
x
H
u
0
H
~
max
u
Zaletą
Zaletą metody jest łatwość zastosowania zasady
maksimum do optymalizacji procesów opisywanych dużą
liczbą zmiennych stanu, zaś
wadą
wadą złożoność obliczeń
przy uwzględnianiu ograniczeń stanu procesu.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
32
Przykład
Przykład
Wyznaczanie bezpiecznej trajektorii statku z
Wyznaczanie bezpiecznej trajektorii statku z
zastosowaniem zasady maksimum
zastosowaniem zasady maksimum
Według danych Lloyd’a ilość utraconego tonażu
spowodowanego kolizjami statków, w odniesieniu do
wszystkich strat poniesionych w wyniku zatonięcia,
pożaru, zaginięcia czy rozbicia, wynosi w
poszczególnych latach od kilku do kilkunastu procent.
Zakłada się, że około połowę tych strat można uniknąć
stosując lepsze metody komputerowo wspomaganego
bezpiecznego sterowania ruchem statku, szczególnie
spośród metod teorii sterowania automatycznego –
optymalizacji statycznej i dynamicznej z
ograniczeniami stanu oraz metod sztucznej inteligencji.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
33
Problem poszukiwania efektywnych metod zapobiegania
kolizjom statków nabrał szczególnego znaczenia wraz ze
zwiększeniem wielkości, prędkości i liczby statków
uczestniczących w przewozach morskich.
Niewątpliwy wkład do zwiększenia bezpieczeństwa żeglugi
wniosło najpierw zastosowanie radaru, a później
mikrokomputerowego systemu antykolizyjnego ARPA
(Automatic Radar Plotting Aids),
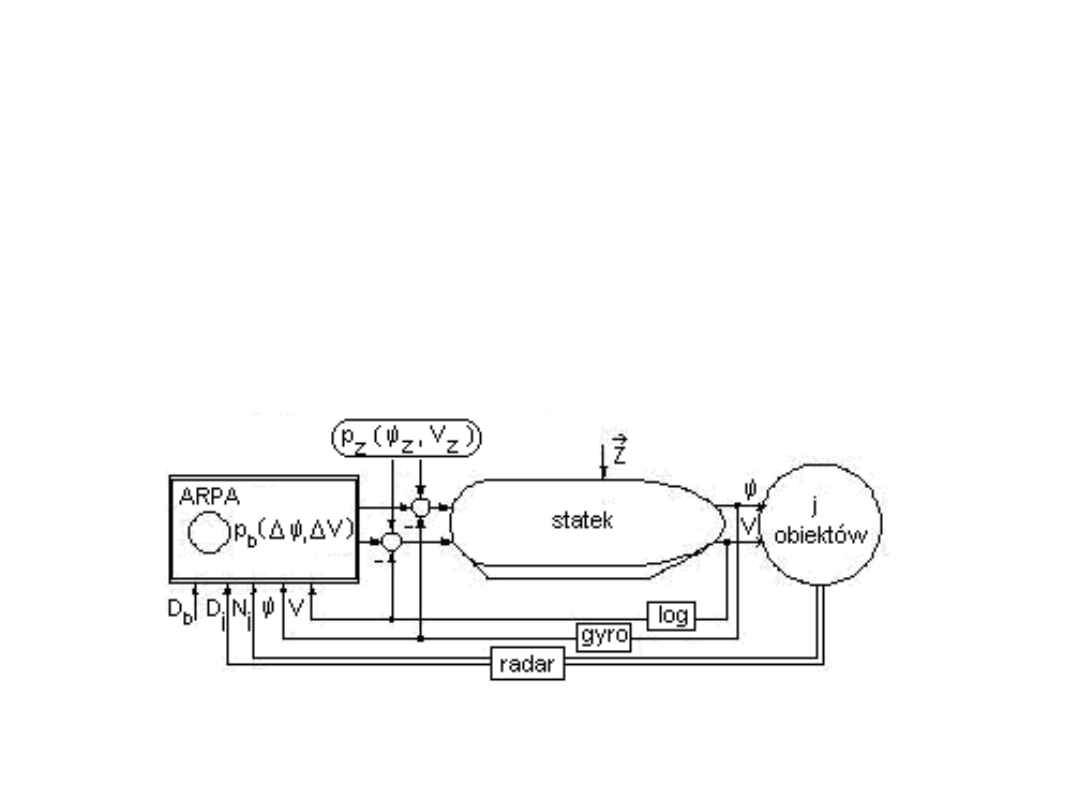
Rys. 1.Struktura systemu bezpiecznego sterowania
statkiem

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
34
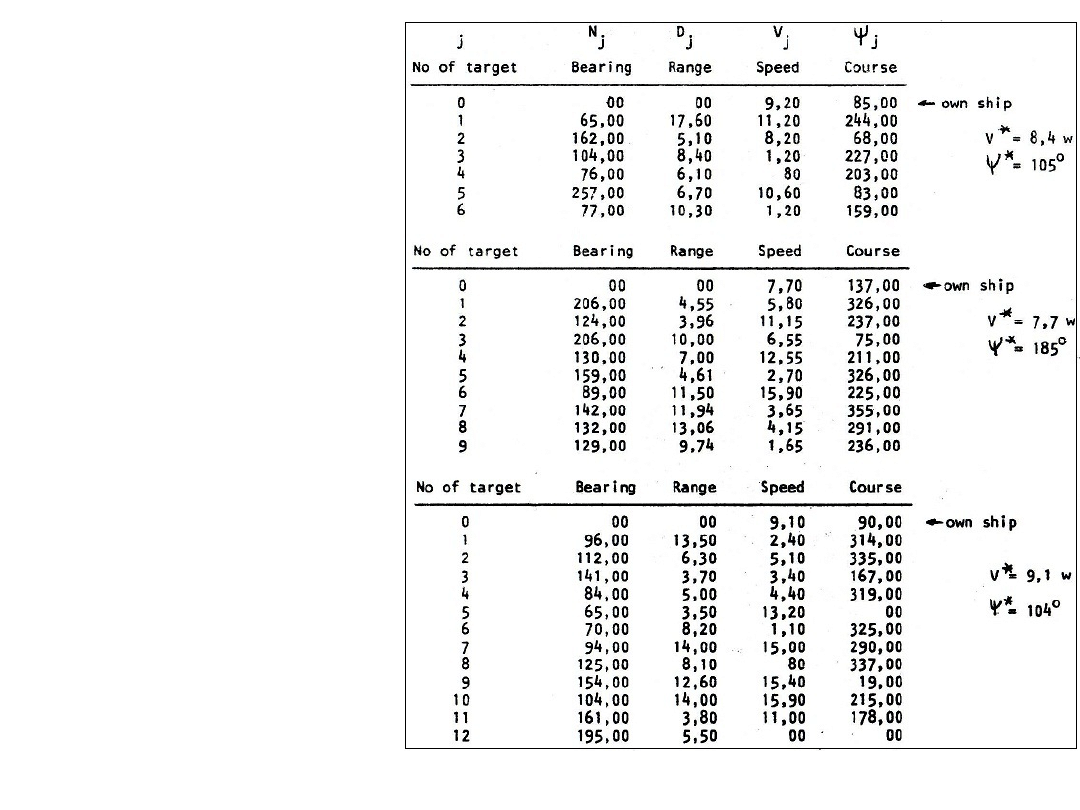
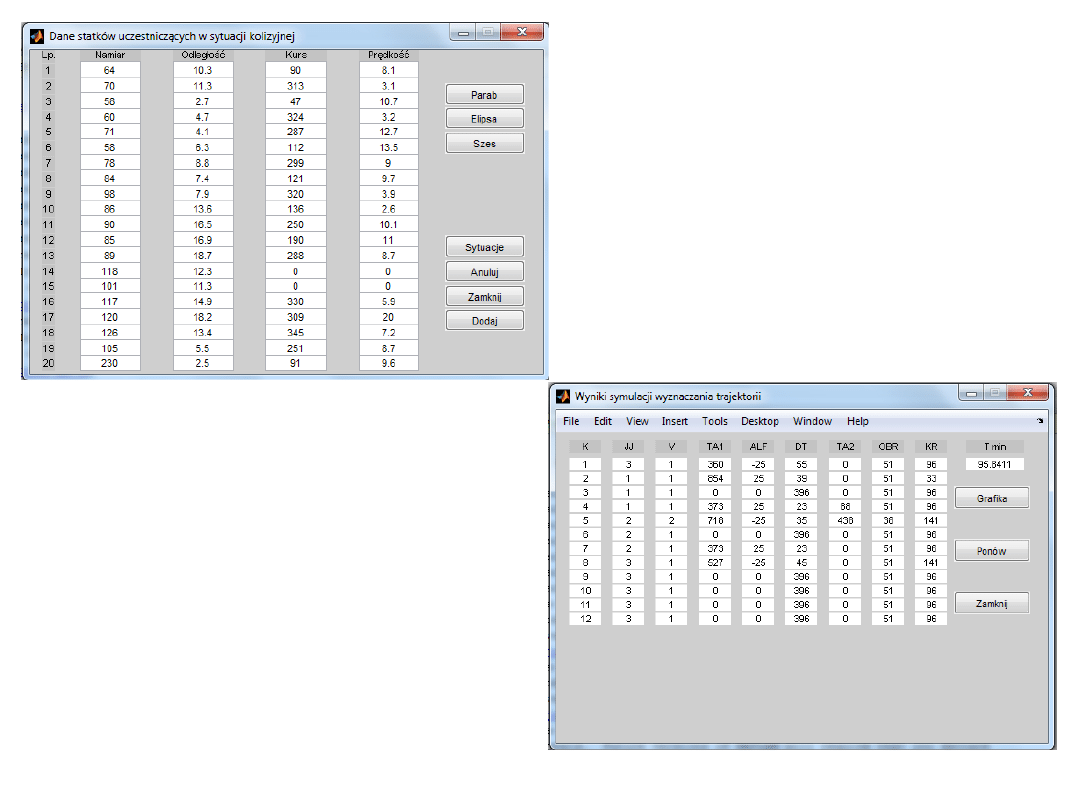
System ARPA umożliwia automatyczne śledzenie 20
spotkanych „j” obiektów, wyznaczenie ich parametrów
ruchu (prędkości V
j
, kursu ψ
j
, odległości D
j
, namiaru N
j
) i
elementów zbliżenia
(odległości , czasu ) oraz ocenę ryzyka kolizji r
j
.
Jednak zakres funkcji standardowego systemu ARPA kończy
się na symulacji wybranego przez nawigatora manewru
zmiany kursu Δψ lub prędkości ∆V w stosunku do ich
zadanych wartości
z
i V
z
aby zachować bezpieczną
odległość mijania D
b
.
Problem wyboru tego manewru jest bardzo trudny ze
względu na dużą złożoność procesu sterowania,
mającego własności: dynamiczne, nieliniowe,
wielowymiarowe, niestacjonarne i rozgrywające.
j
min
D
j
min
T
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
35
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
36
W praktyce metody wyboru manewru przyjmują postać
odpowiednich algorytmów sterowania,
zaprogramowanych w pamięci sterownika
mikroprocesorowego, tworzącego opcję systemu
antykolizyjnego ARPA lub symulatora szkoleniowego w
laboratorium uczelni morskiej.
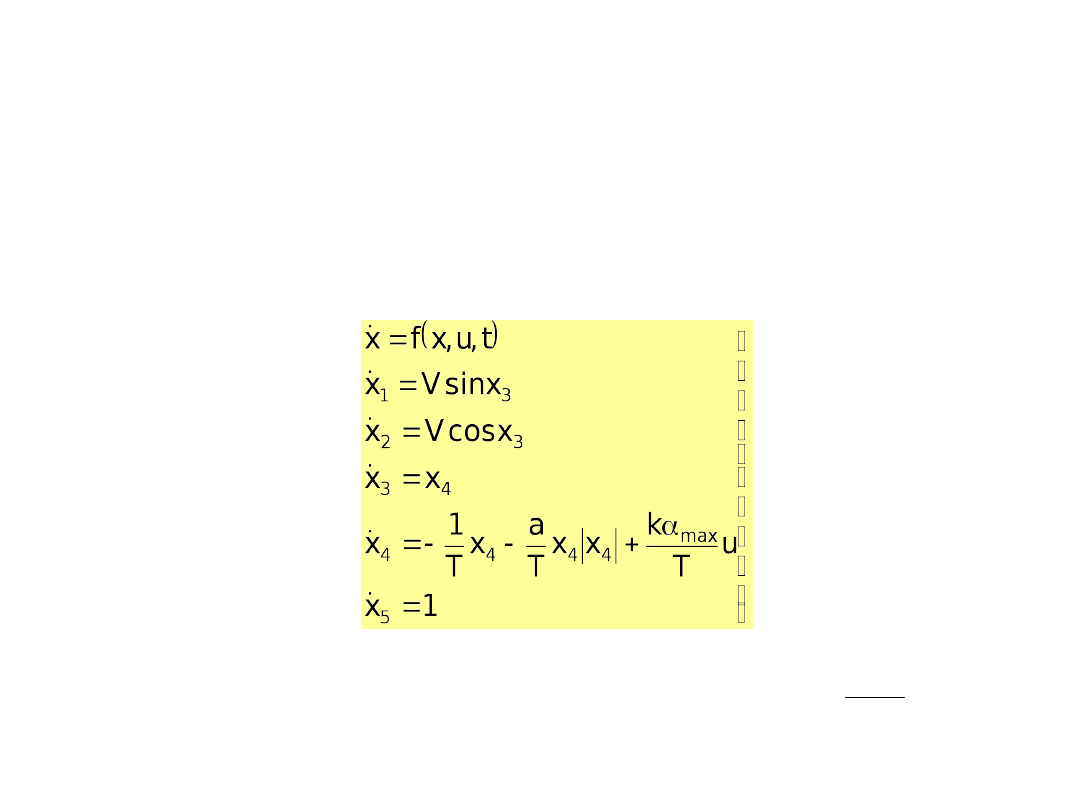
Uwzględnienie kinematyki i dynamiki statku prowadzi do
równań stanu procesu sterowania jego ruchem:
max
u
gdzie: x
1
, x
2
– współrzędne położenia statku, x
3
= – kurs statku,
x
4
= - prędkość kątowa zwrotu statku, x
5
= t – czas, -
względne
wychylenie steru
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
37
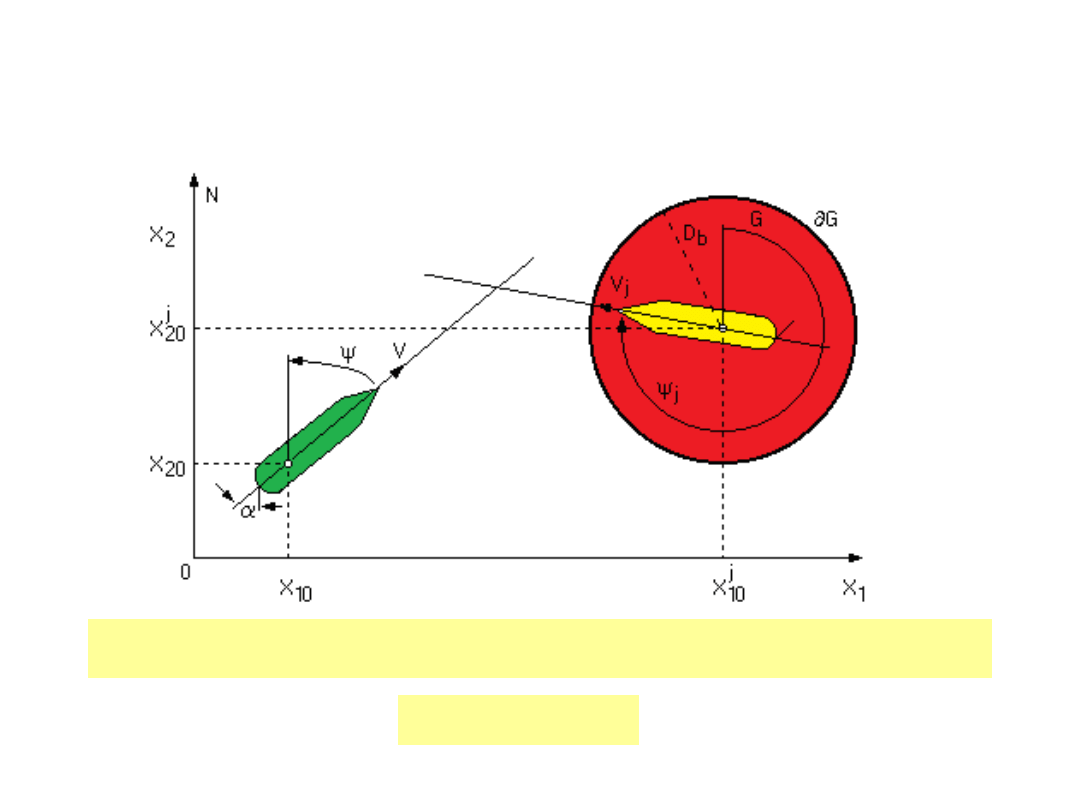
Ograniczenia stanu i sterowania
Ograniczenia stanu i sterowania
Ograniczenia stanu wynikające z konieczności zachowania
bezpiecznej odległości mijania D
b
postać koła:
0
x
cos
x
V
x
x
sin
x
V
x
D
x
g
2
j
20
j
5
j
2
2
j
10
j
5
j
1
2
b
0
1
u
u
g
2
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
38
Wska
Wska
ź
ź
nik jakości sterowania
nik jakości sterowania
Oprócz kryterium bezpieczeństwa istotne jest kryterium
ekonomiczne związane z najmniejszymi stratami drogi
na bezpieczne wymijanie spotkanych statków, które
można sprowadzić do problemu sterowania
czasooptymalnego:
k
o
k
o
t
t
t
t
o
dt
dt
f
I
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
39
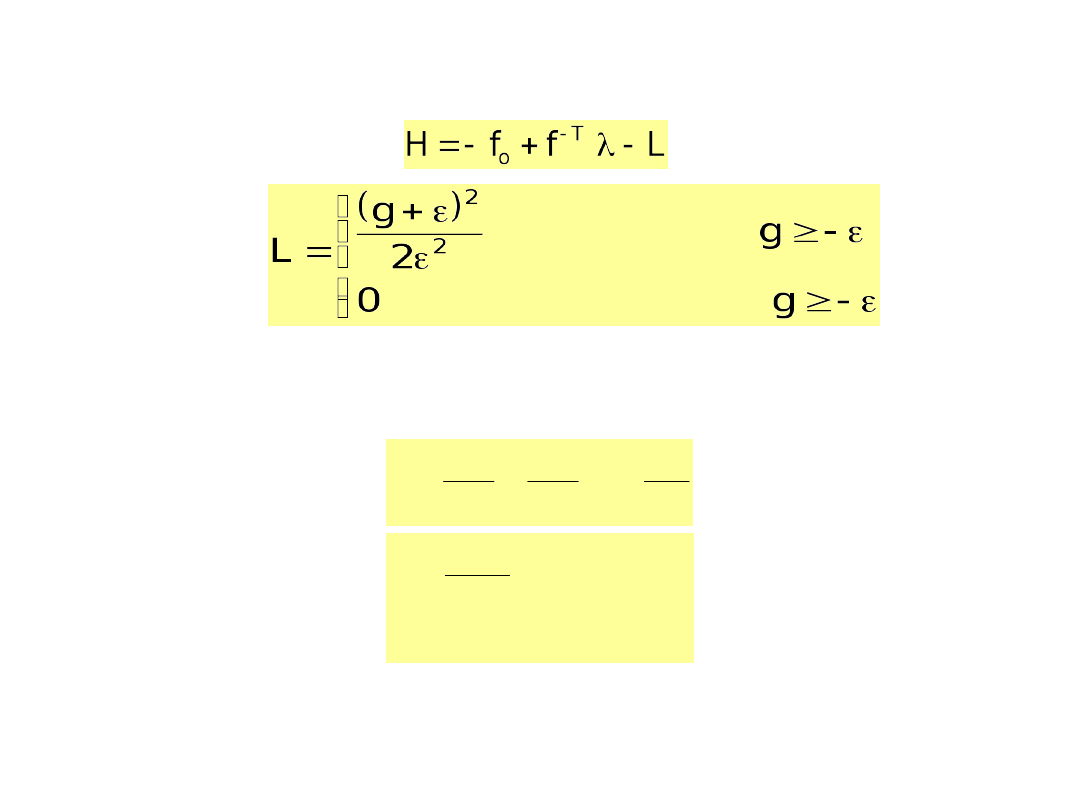
Hamiltonian i równania sprzężone
Hamiltonian i równania sprzężone
dla zasady maksimum z funkcją kary
dla zasady maksimum z funkcją kary
gdzie:
f
o
– funkcja celu sterowania
L – funkcja kary
x
g
l
x
f
x
f
o
o
g
0
g
g
l
2
Jeżeli dąży do zera to wyznaczone sterowanie zbliża się do
optymalnego z uwzględnieniem ograniczeń.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
40
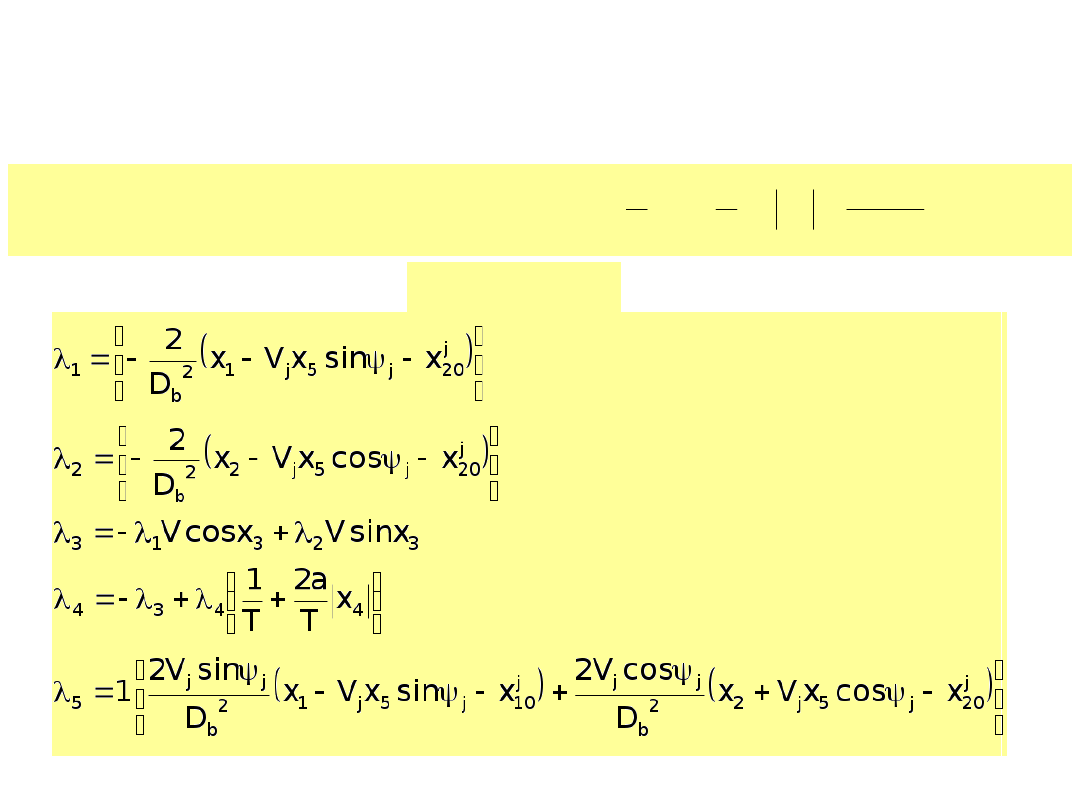
Hamiltonian i równania sprzężone
Hamiltonian i równania sprzężone
Sterowanie optymalne wynika z warunku maksimum
hamiltonianu:
4
sign
t
u
L
u
T
k
x
x
T
a
x
T
1
x
x
cos
V
x
sin
V
H
5
max
4
4
4
4
4
3
3
2
3
1
o
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
41
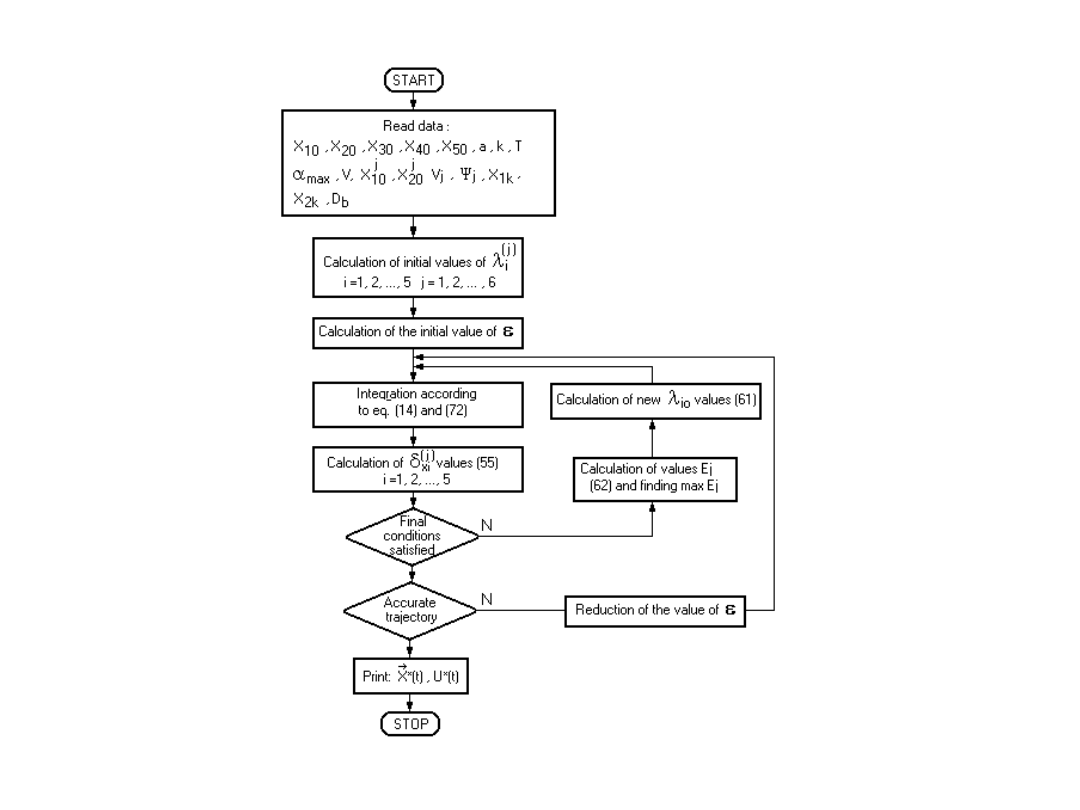
Algorytm wyznaczania trajektorii
Algorytm wyznaczania trajektorii
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
42
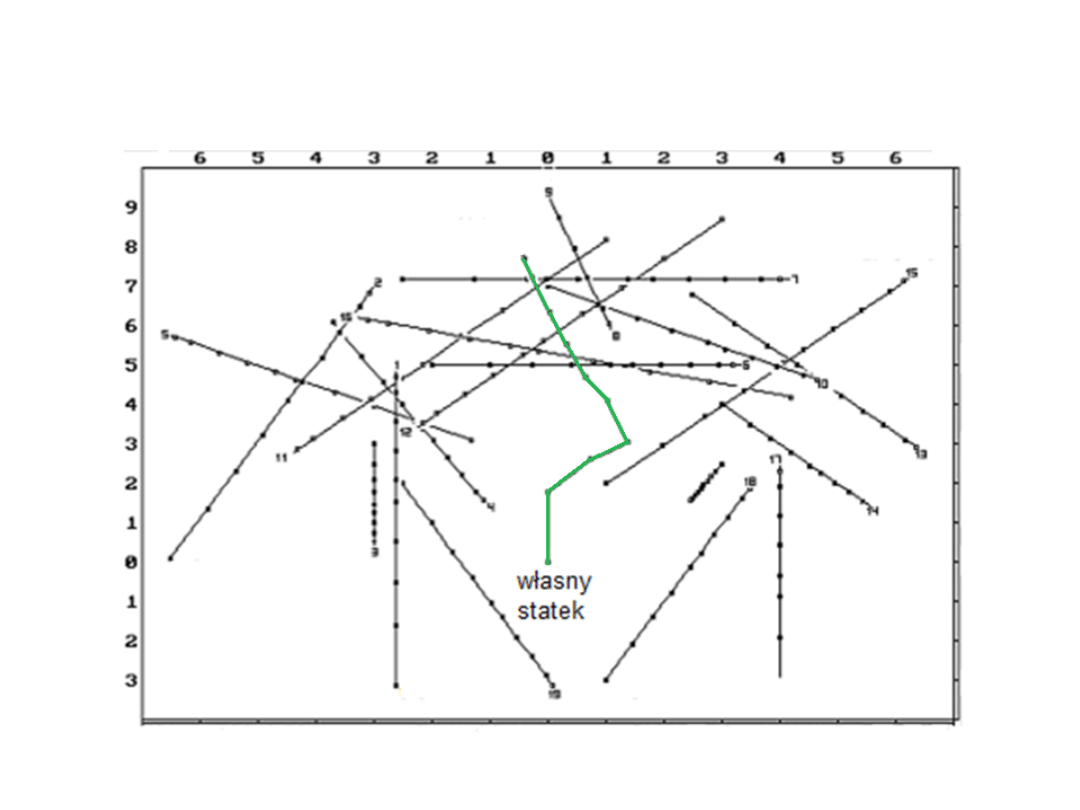
Trajektoria bezpieczna i optymalna własnego statku
w sytuacji mijania się z 20 spotkanymi statkami u ujścia
Tamizy
Zasada optymalności
Zasada optymalności
Bellmana
Bellmana
Sterowanie optymalne od danej chwili t do chwili
końcowej t
k
zależy tylko od aktualnego stanu procesu,
a nie zależy od poprzednich stanów.
Dla równania stanu procesu:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
43
t
,
u
,
x
f
x
oraz wskaźnika jakości sterowania:
dt
t
,
u
,
x
f
I
o
o
który
ma
przyjąć
wartość
optymalną:
t
,
x
S
dt
t
,
u
,
x
f
min
I
min
o
o
Richard
Ernest
Bellman
(1920-1984)
Matematyk
amerykański.
Równanie funkcyjne Bellmana, opisujące zasadę optymalności,
przyjmie następującą postać analityczną:
Rozwiązanie dyskretne zasady optymalności jako
programowanie dynamiczne ma postać:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
44
0
x
S
t
,
u
,
x
f
t
,
u
,
x
f
min
t
S
o
u
przy równaniu stanu procesu w postaci dyskretnej
k
,
k
u
,
k
x
f
1
k
x
Programowanie dynamiczne w odróżnieniu od rachunku
wariacyjnego pozwala znaleźć optymalne sterowanie jako funkcję
współrzędnych stanu procesu tj. rozwiązać problem syntezy
zamkniętego układu sterowania ze sprzężeniem zwrotnym.
Zaletą
Zaletą
metody jest łatwość uwzględniania ograniczeń stanu procesu.
Wadą
Wadą metody jest ograniczona możliwość zastosowania do większej
liczby zmiennych stanu konkretnego procesu sterowania.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
45
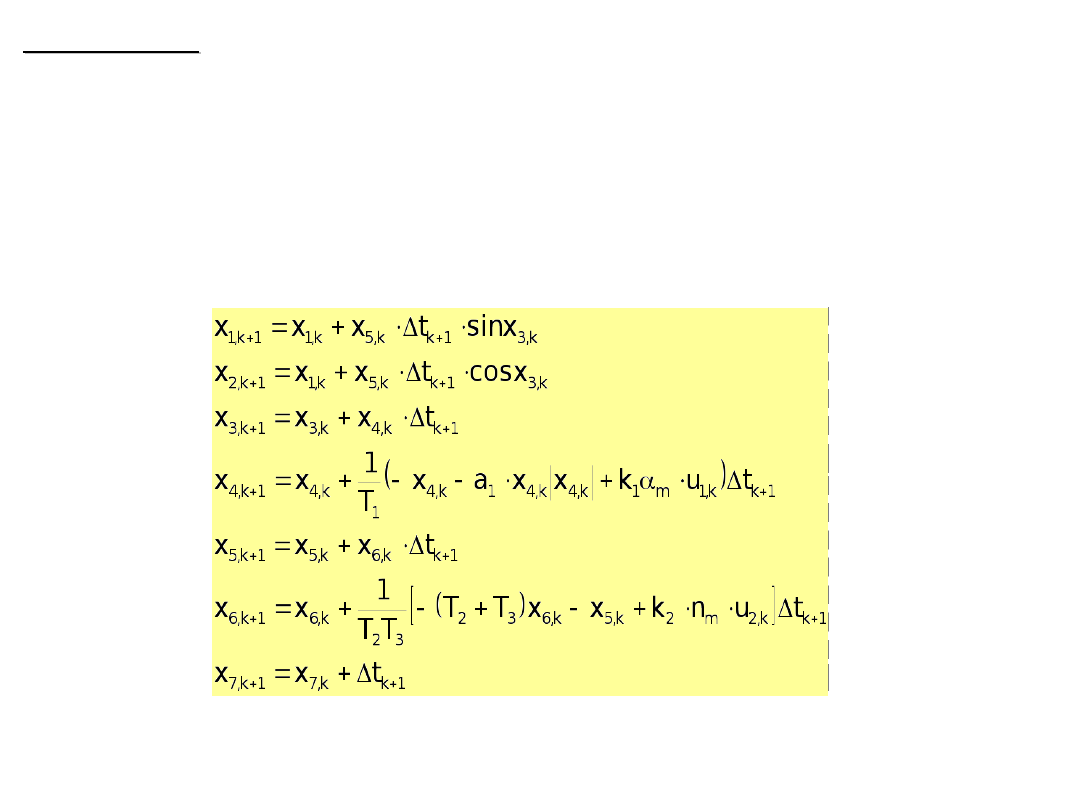
Uwzględnienie kinematyki i dynamiki statku prowadzi do równań
stanu procesu sterowania jego ruchem, które w postaci
dyskretnej przyjmują postać:
(1)
gdzie: x
1
= x, x
2
= y, x
3
=, x
4
= , x
5
=V, x
6
= , x
7
= t, u
1
=
m
, u
2
= n/n
m
V
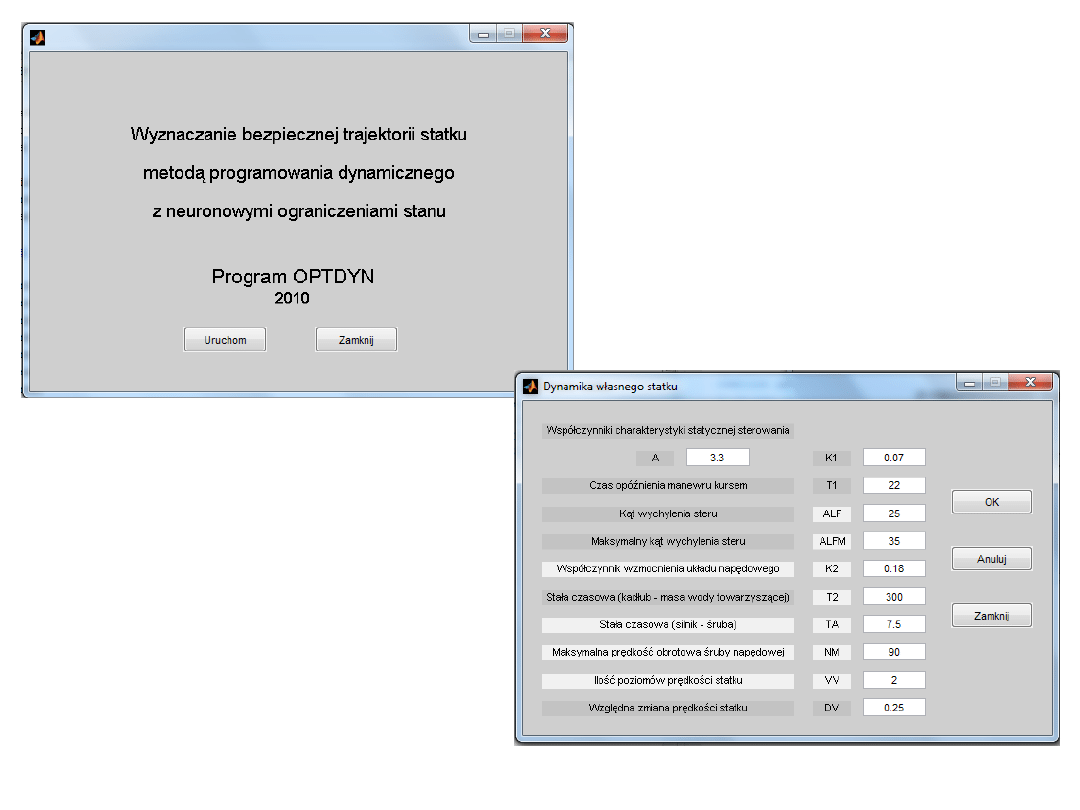
Przykład
Przykład
Wyznaczanie bezpiecznej trajektorii statku z
Wyznaczanie bezpiecznej trajektorii statku z
zastosowaniem
zastosowaniem
programowania dynamicznego z
programowania dynamicznego z
neuronowymi ograniczeniami stanu procesu
neuronowymi ograniczeniami stanu procesu
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
46
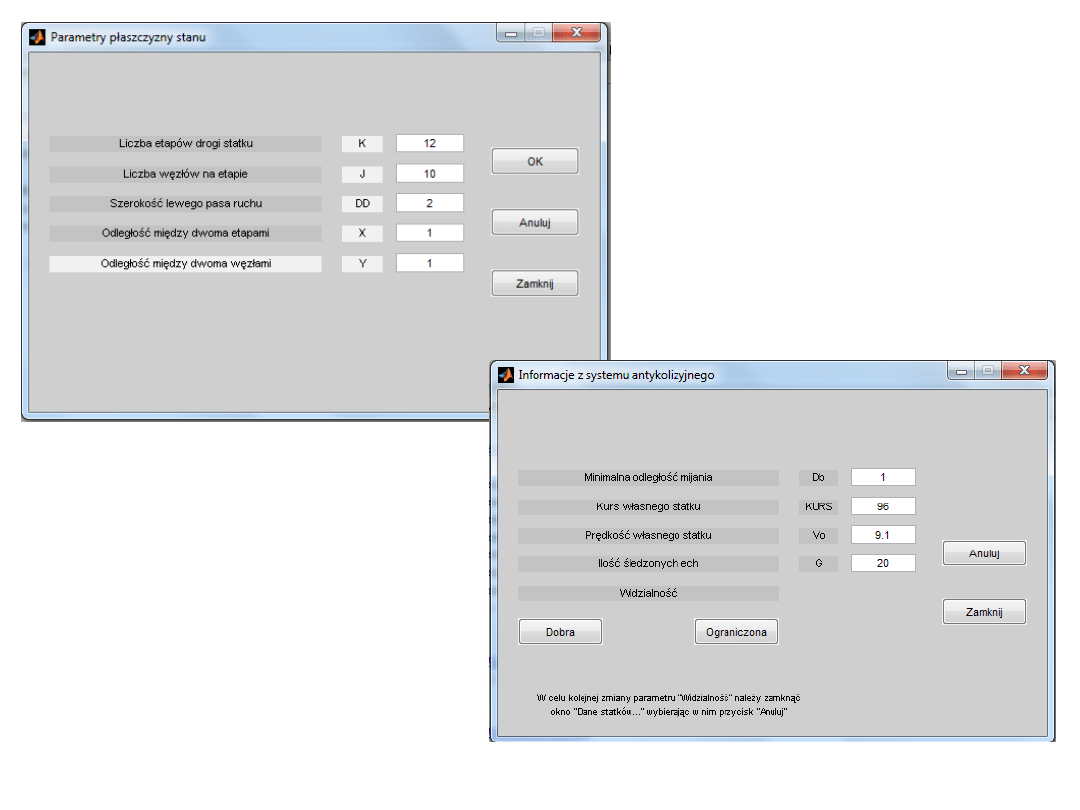
Występujące ograniczenia wynikają z konieczności
uwzględnienia fizycznych ograniczeń wielkości
charakteryzujących proces:
uwzględnienia rzeczywistych ograniczeń nawigacyjnych:
oraz zapewnienia bezpiecznego mijania się z „j”
spotkanym
obiektem z jednoczesnym uwzględnieniem zaleceń
przepisów prawa drogi morskiej:
(4)
(3)
(5)
(2)
1
u
0
,
1
u
2
1
max
6
max
5
max
4
V
x
0
,
V
x
0
,
x
0
0
x
,
x
g
2
1
n
0
x
,
x
,
x
g
7
2
1
j
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
47
Zależność g
j
określa obszar zagrożenia kolizyjnego tzw. domenę
statku (z ang. ship’s domain), przyjmując postać koła, paraboli,
elipsy lub sześciokąta.
Domeny statków mają zmienny kształt zależny od względnej
prędkości spotkanego obiektu oraz ryzyka kolizji i są
generowane przez sztuczną sieć neuronową wykorzystując
Neural Network Toolbox MATLAB.
W praktyce stan procesu jest kontrolowany na bieżąco przez
urządzenia systemu antykolizyjnego ARPA (radar, żyrokompas,
log, mierniki prędkości kątowej i obrotowej).
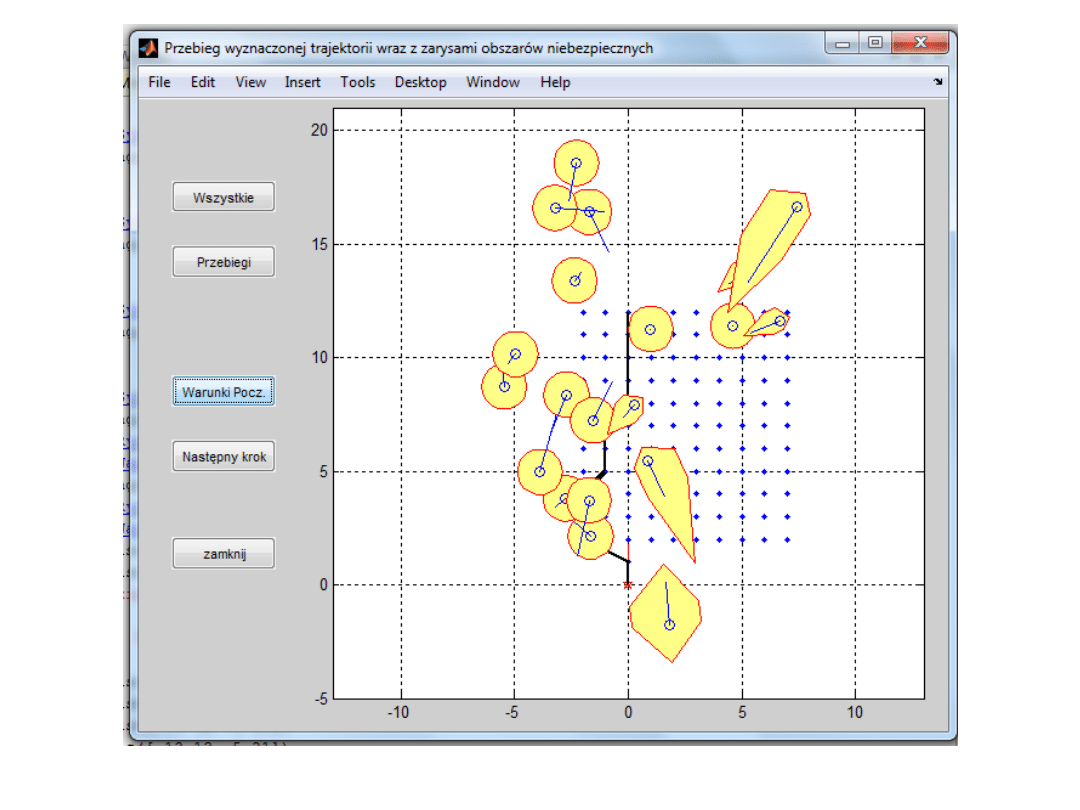
Warunki początkowe procesu wyznacza rozmaitość Θ ํ, określona
w trakcie inicjacji automatycznego śledzenia przez system ARPA
ruchu spotkanych obiektów:
(6)
(7)
0
x
,
0
x
,
V
x
,
0
x
,
x
,
y
x
,
x
x
o
7
o
6
o
o
5
o
4
o
o
3
o
o
2
o
o
1
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
48
Ze względu na warunki końcowe wyróżnia się dwa
rodzaje zadań sterowania:
- z ustalonym punktem końcowym trajektorii w sytuacji
kierowania ruchem statku na wodach ograniczonych
-
z ustalonym kursem końcowym na wodach otwartych
Dodatkowo uwzględnia się kryterium optymalności w
postaci najmniejszych strat drogi na bezpieczne
wymijanie obiektów, które przy stałej prędkości statku
prowadzi do sterowania czasooptymalnego:
(10
)
(11
)
(12
)
k
k
oK
oK
y
,
x
L
L
o
K
5
K
6
K
4
o
K
3
V
x
,
0
x
x
,
x
k
0
k
0
t
t
t
t
dt
V
Vdt
I

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
49
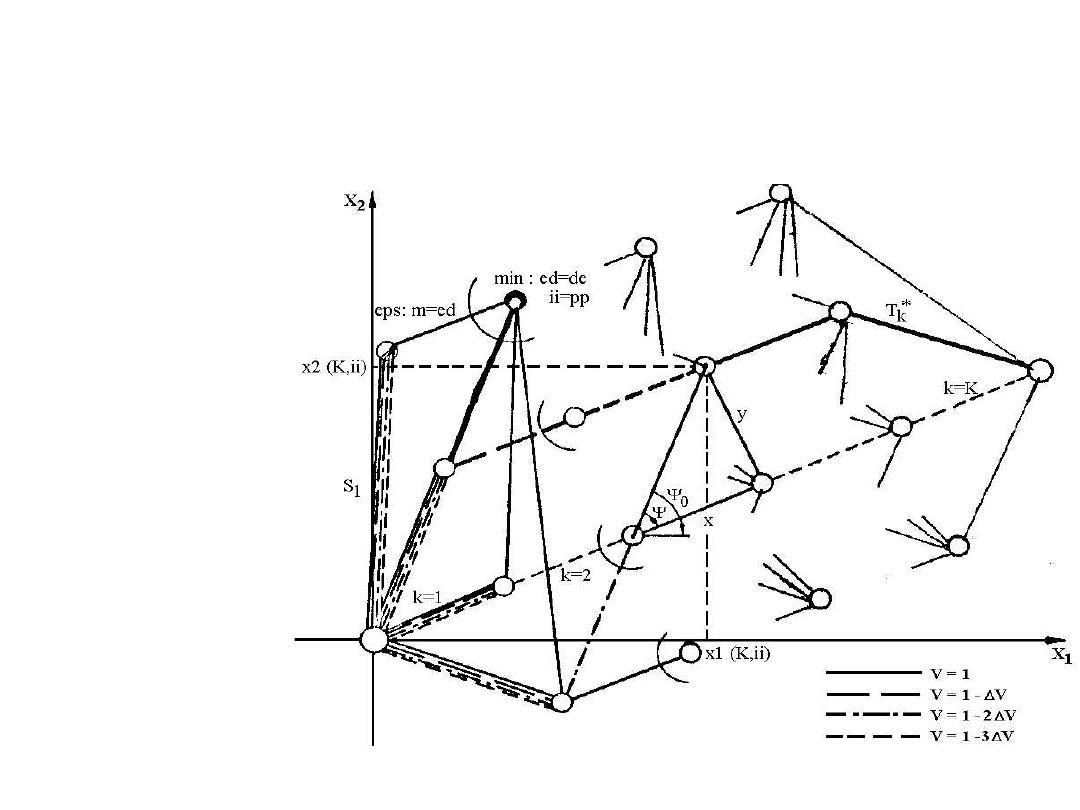
Algorytm OPTDYN
Algorytm OPTDYN
wyznaczania bezpiecznej trajektorii statku
w sytuacji kolizyjnej metodą
programowania dynamicznego
z neuronowymi ograniczeniami stanu
procesu
Zasada optymalności Bellmana określa podstawową
własność strategii optymalnej – niezależnie od stanu i
decyzji początkowych pozostałe decyzje muszą tworzyć
strategie optymalne z punktu widzenia stanu wynikłego z
pierwszej decyzji.
Można wykazać, że proces zapobiegania zderzeniom
statków spełnia warunki dualności, dlatego trajektorię
optymalną statku w sytuacji kolizyjnej wyznacza się
rozpoczynając obliczenia od pierwszego etapu, a
następnie przesuwając się ku ostatniemu.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
50
Optymalny czas przepłynięcia przez statek k etapów
wyniesie:
(13
)
Optymalny czas przejścia k etapów jest funkcją
stanu układu na końcu (k–1) etapu oraz
sterowania na (k–2) etapie.
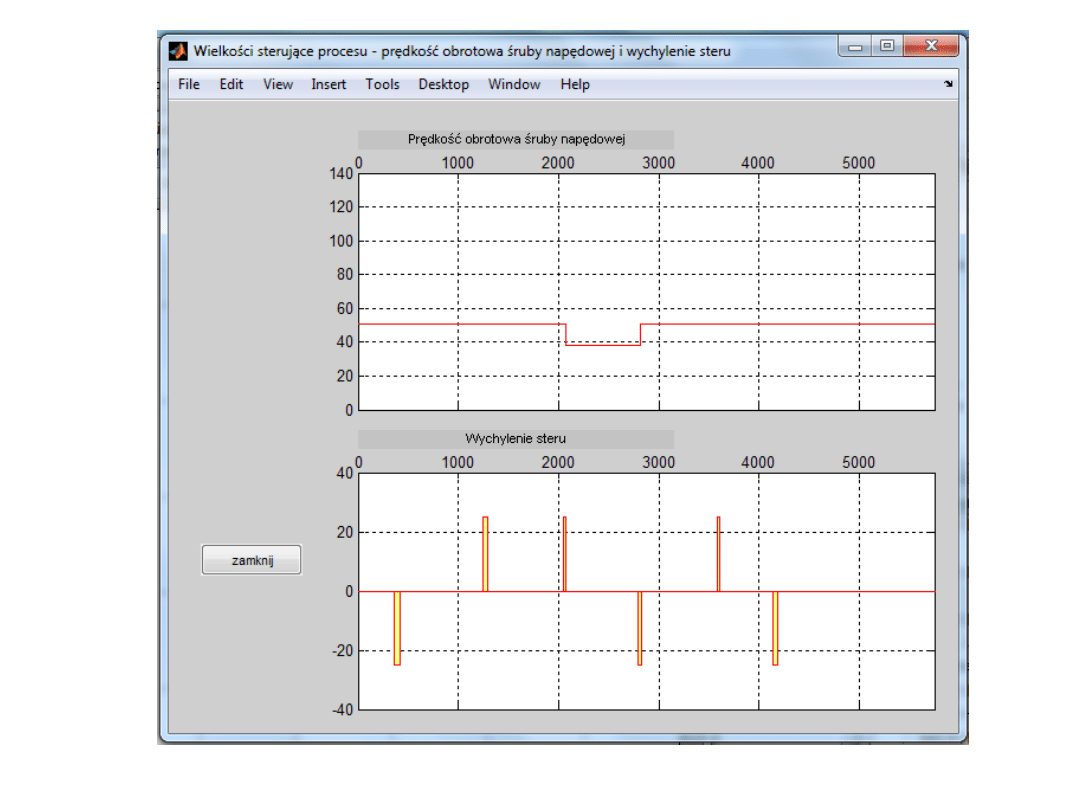
Przechodząc od pierwszego do ostatniego etapu
wzór określa równanie funkcyjne Bellmana dla
procesu sterowania statkiem poprzez zmianę
kąta wychylenia steru oraz prędkości obrotowej
śruby.

prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
51
Ograniczenia zmiennych stanu oraz wielkości
sterujących tworzą w algorytmie wyznaczania
dynamicznej bezpiecznej trajektorii statku
oddzielną procedurę obliczeniową.
Uwzględnienie ograniczeń wynikających z
zachowania bezpiecznej odległości zbliżenia oraz
zaleceń prawa drogi polega na sprawdzeniu, czy
zmienne stanu nie przekroczyły ograniczeń w
każdym rozważanym węźle i odrzuceniu węzłów,
w których przekroczenie to zostało wykryte.
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
52
Podział
drogi statku
na
k etapów
i
n węzłów:
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
53
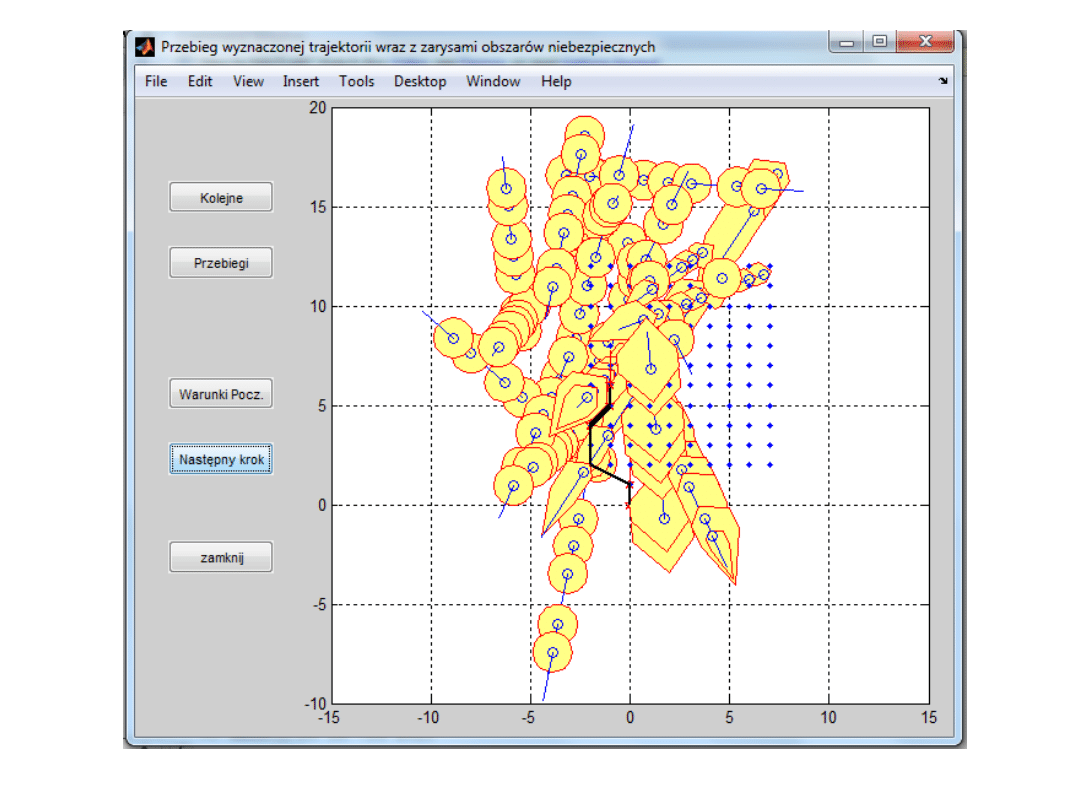
Wyznaczenie
bezpiecznej
trajektorii
z
uwzględnienie
m
zmian
prędkości
własnego
statku
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
54
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
55
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
56
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
57
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
58
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
59
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
60
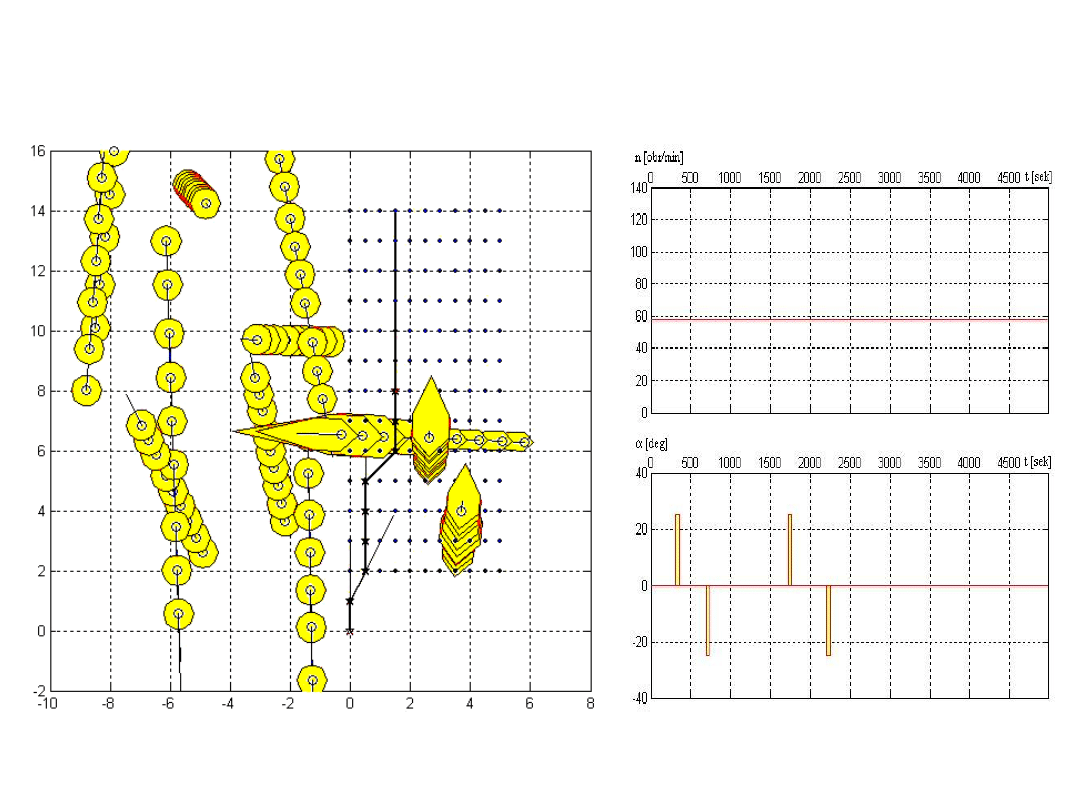
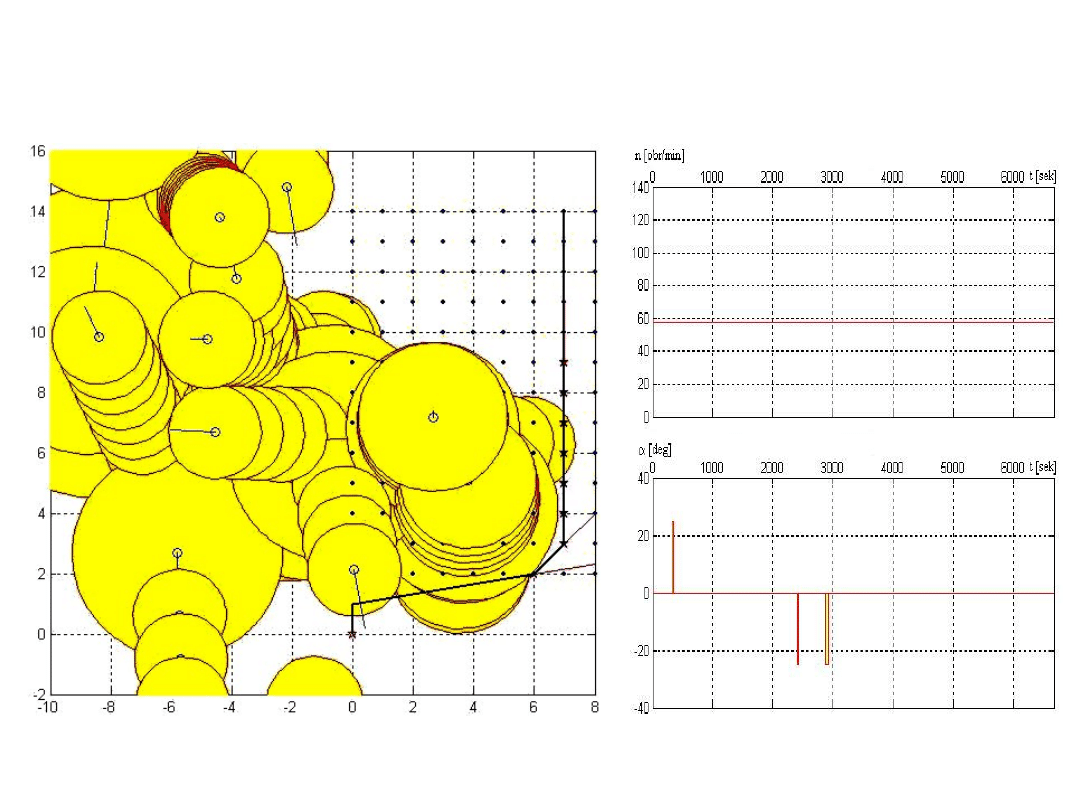
Symulacja bezpiecznej trajektorii statku w warunkach dobrej
widzialności na morzu, j=12, D
b
= 0,5 Mm, t*
k
= 4982 sek
prof. Józef Lisowski
PODSTAWY AUTOMATYKI_XIV_Sterowanie
optymalne
61
Symulacja bezpiecznej trajektorii statku w warunkach
ograniczonej widzialności na morzu, j=12, D
b
= 3 Mm t*
k
= 6685 sek
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
Wyszukiwarka
Podobne podstrony:
A8 Omówi narz dzia i metody rozwi zywania zadania sterowania optymalnego
A7 Przyk?owe sformu owania zada sterowania optymalnego
A8 Omówi narz dzia i metody rozwi zywania zadania sterowania optymalnego
A8 Omówi narz dzia i metody rozwi zywania zadania sterowania optymalnego
Sterowanie optymalne z kwadratowym wskaźnikiem jakości
Optymalne sterowanie i tradycyjny rachunek wariacyjny Dwuwymiarowe zagadnienie Newtona
XIV optymanla kombinacja czynnikow
PracaMag optymalizacja algorytmów warstwy sterowania, komputery, sieci komputerowe
Badanie dominacji sterowań okresowych nad optymalnym statycznym procesem
Układy Napędowe oraz algorytmy sterowania w bioprotezach
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
Sterowce
Optymalizacja LP
WYKŁAD 02 SterowCyfrowe
Zasady ergonomii w optymalizacji czynności roboczych
wykład 4 Sterowanie zapasami
Sterowniki PLC
więcej podobnych podstron