Fizyka
Program przedmiotu:
15 godzin wykładu - dr Krystyna Chłędowska
20 godzin ćwiczeń audytoryjnych
Wydział Matematyki i Fizyki Stosowanej
Katedra Fizyki
pracownicy
Treści kształcenia:
Dynamika układów punktów materialnych.
Elementy mechaniki relatywistycznej.
Podstawowe prawa elektrodynamiki i
magnetyzmu.
Zasady optyki geometrycznej i falowej.
Elementy optyki relatywistycznej.
Podstawy akustyki.
Mechanika kwantowa i budowa materii.
Fizyka laserów.
Podstawy krystalografii.
Metale i półprzewodniki.
Literatura
1. K. Chłędowska, R. Sikora, Wybrane problemy fizyki z
rozwiązaniami cz. I, Oficyna Wydawnicza Politechniki
Rzeszowskiej, Rzeszów 2008
2. R. Sikora, K. Chłędowska, Problemy fizyki z rozwiązaniami cz.
II, Oficyna Wydawnicza Politechniki Rzeszowskiej, Rzeszów
2002
3. D. Halliday, R. Resnick, J. Walker, Podstawy fizyki , PWN,
Warszawa 1999
4. J. Massalski, M. Massalska, Fizyka dla inżynierów, WNT
Warszawa 2005
5. C. Bobrowski, Fizyka – krótki kurs, WNT Warszawa 2003
6. J. Orear, Fizyka, WNT Warszawa 1999
7. I.W. Sawieliew, Wykłady z fizyki, PWN Warszawa 1994
Zaliczenie przedmiotu:
Uzyskanie zaliczenia z ćwiczeń
audytoryjnych
Egzamin:
Forma pisemna obejmująca:
• pytania problemowe
• szczegółowe opracowanie jednego tematu
• zadania
Dynamika układów punktów
materialnych
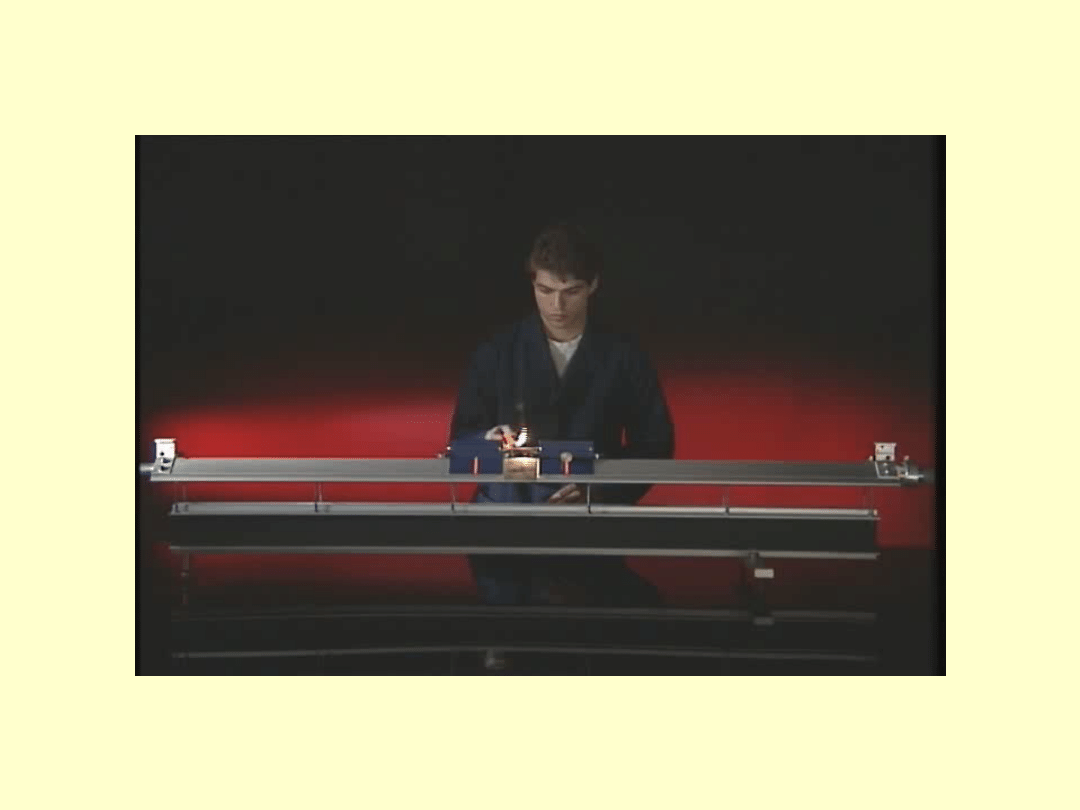
Punkt materialny – ciało obdarzone masą, ale nie
posiadające objętości. Ruch postępowy każdego
rzeczywistego obiektu można opisać jako ruch punktu
materialnego.
Przemieszczenia liniowe wszystkich elementów samochodu
są
jednakowe
samochód podczas ruchu prostoliniowego możemy
potraktować jak punkt materialny
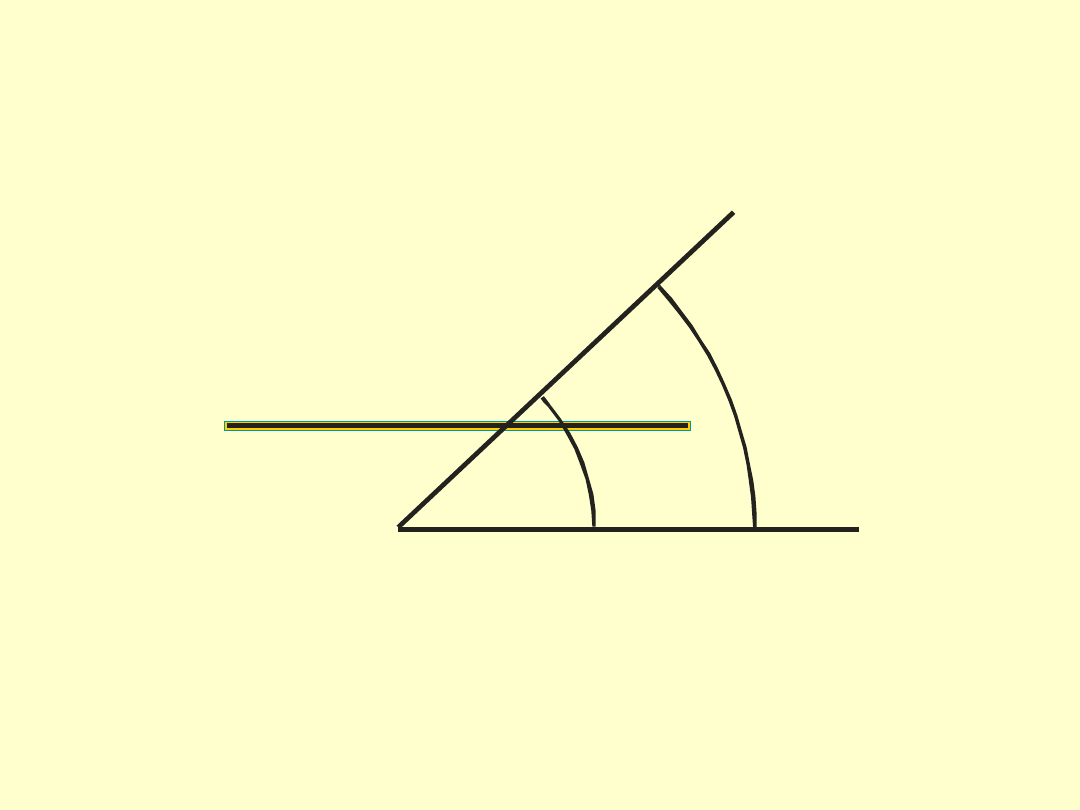
Przemieszczenie liniowe elementów pręta
zależy
od
odległości od osi obrotu
A
B
Ciała obracające się nie mogą być traktowane jak punkty materialne
1. Dane jest ciało o ściśle określonych własnościach
2. Ciało umieszczamy w znanym otoczeniu –
potrafimy określić siły, które na niego działają
Pytamy:
jaki będzie ruch tego ciała?
Problem dynamiki możemy sformułować następująco:
r
F
M
m
r
r
r
Mm
G
F
2
2
2
11
10
66
.
6
kg
Nm
G
r
r
r
Mm
G
F
2
?
Ziemia
M
Z
>> M, m
2
2
2
r
Mm
G
R
M
M
G
R
m
M
G
Z
Z
Z
Z
r
+q
+Q
r
r
r
k
F
2
F
2
2
12
10
8542
,
8
Nm
C
o
2
2
9
10
9
4
1
C
Nm
k
o

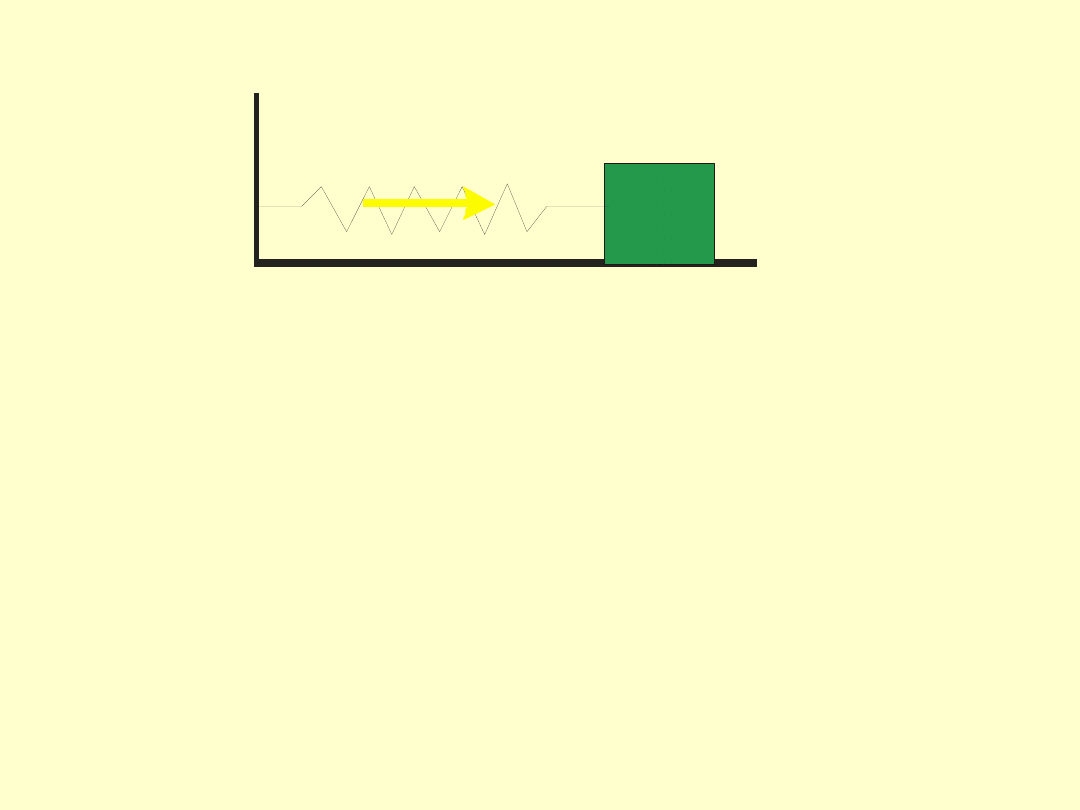
k
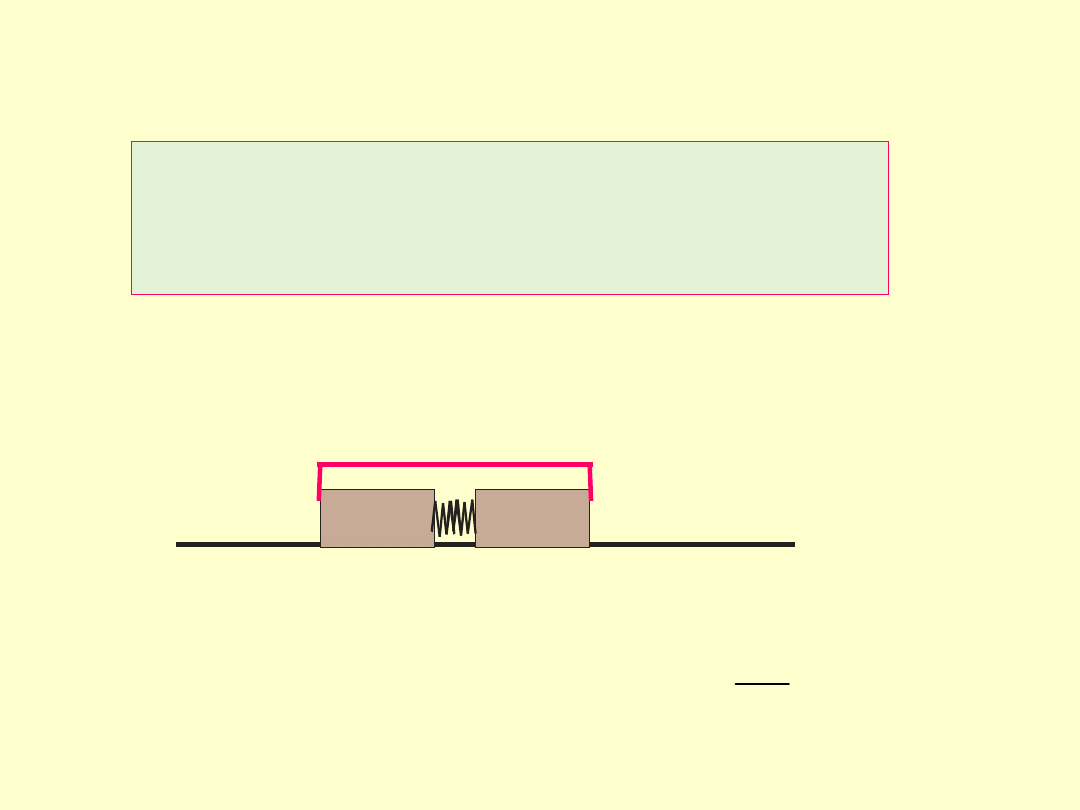
m
kx
F
1
F
1
Jeżeli dodatkowo występuje tarcie pomiędzy masą m a powierzchnią, to
fmg
F
2
f – współczynnik tarcia
I
1
I
2
F
F
l
a
I
I
F
2
1
0
2
4
Am
Wb
7
0
10
4
Zasady dynamiki Newtona
I zasada dynamiki
Każde ciało pozostaje w stanie spoczynku lub ruchu
jednostajnego po linii prostej dopóty, dopóki nie zostanie
zmuszone za pomocą wywierania odpowiednich sił do zmiany
tego stanu.
I zasada dynamiki stwierdza, że jeżeli w pobliżu danego ciała
nie ma innych ciał (a więc nie działają siły), to można znaleźć
taki układ odniesienia, w którym ciało nie będzie mieć
przyspieszenia.
Isaac Newton 1642-1721
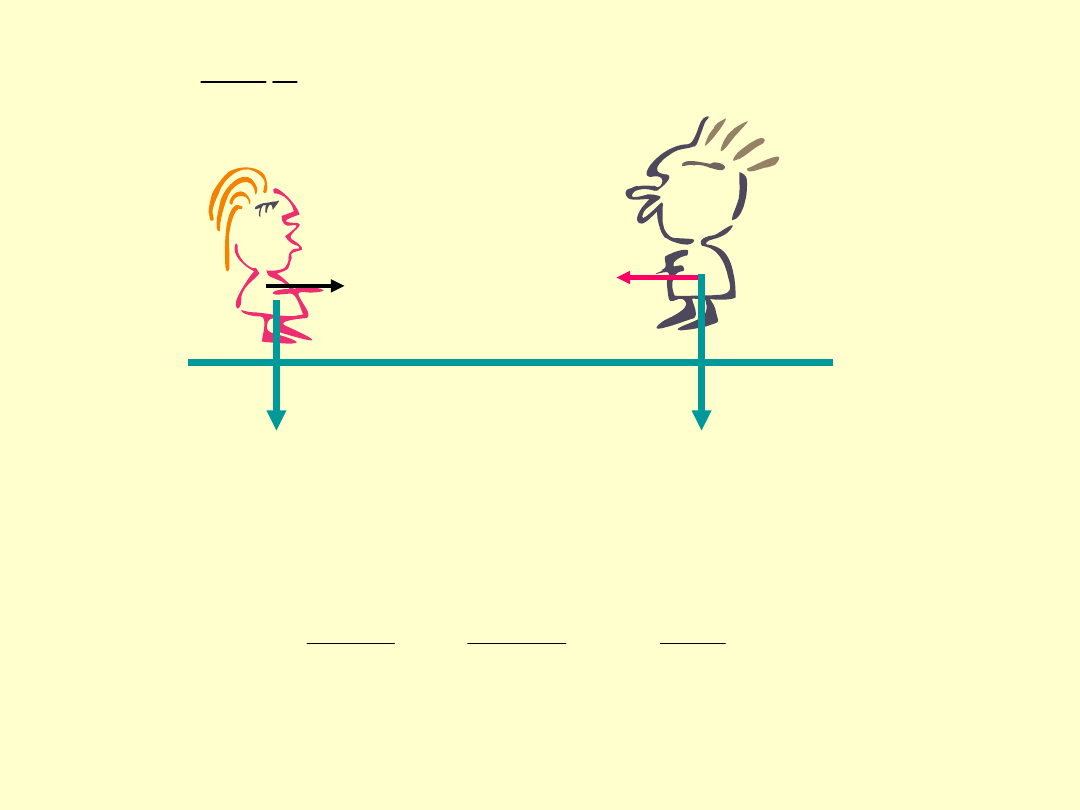
Układ S spoczywa, układ S’ porusza się ze stałą prędkością v.
S’
S
Obserwator znajdujący się w układzie S’ stwierdza:
chłopiec spoczywa
Obserwator znajdujący się w układzie S stwierdza:
chłopiec porusza się z prędkością v = const.
Obydwaj obserwatorzy stwierdzą”
przyspieszenie chłopca a = 0.
Fakt, ze ciało pozostaje w spoczynku lub porusza się ze stałą
prędkością, jeśli nie przykładamy do niego żadnej siły wiąże
się z właściwością materii zwaną bezwładnością (inercją).
Układy, w których obowiązuje I zasada dynamiki nazywamy
układami inercjalnymi.
II zasada dynamiki
Jeżeli na ciało działa wypadkowa siła to przyspieszenie
tego
jest wprost proporcjonalne do działającej siły a odwrotnie do
masy ciała.
Jeśli określimy siły działające na ciało, to znając warunki
początkowe
możemy wyznaczyć położenie ciała, jego prędkość i
przyspieszenie w dowolnej chwili.
F
m
F
a
o
o
r
r
v
v
t
,
,
0
Przyspieszenie średnie
t
v
a
śr
Prędkość średnia
t
r
v
śr
W równaniu Newtona występuje przyspieszenie chwilowe
dt
v
d
t
v
a
t
chw
0
lim
dt
r
d
t
r
v
t
chw
0
lim
Równanie
jest równaniem wektorowym.
2
2
dt
r
d
m
dt
v
d
m
a
m
F
m
F
a
z
y
x
F
F
F
F
F
,
,
2
2
2
2
2
2
dt
z
d
m
dt
dz
dt
d
m
dt
dv
m
F
dt
y
d
m
dt
dy
dt
d
m
dt
dv
m
F
dt
x
d
m
dt
dx
dt
d
m
dt
dv
m
F
z
z
y
y
x
x
?
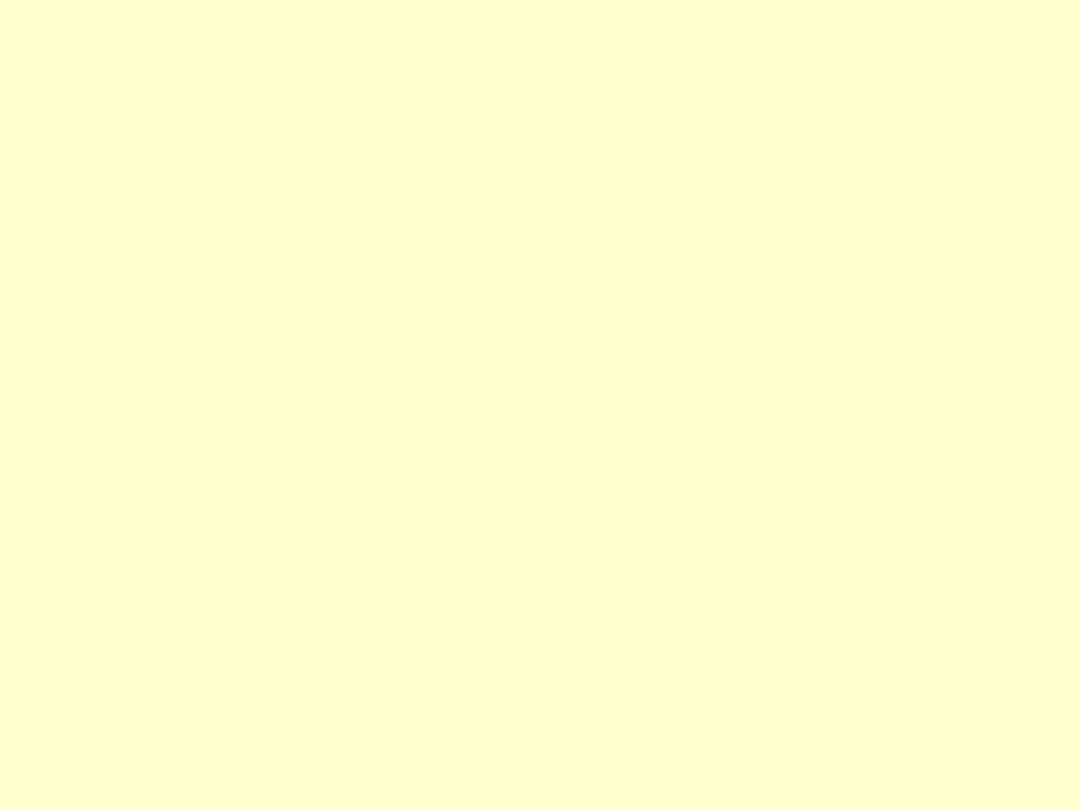
Elementy analizy matematycznej
Funkcje
Zmienna
y
nazywa się
zmienną zależną
albo
funkcją
zmiennej x
jeśli przyjmuje określone wartości dla każdej wartości zmiennej x w
jej pewnym przedziale zmienności.
)
(
)
(
x
y
y
x
f
y
lub
-3
-2
-1
0
1
2
3
0
2
4
6
8
10
y
x
-3
-2
-1
0
1
2
3
0
2
4
6
8
10
y
x
2
2x
y
3
4
2
2
x
x
y
-3
-2
-1
0
1
2
3
0
5
10
15
20
25
30
y
x
x
x
x
y
2
3
4
-3
-2
-1
0
1
2
3
-4
-2
0
2
4
y
x
x
y 3
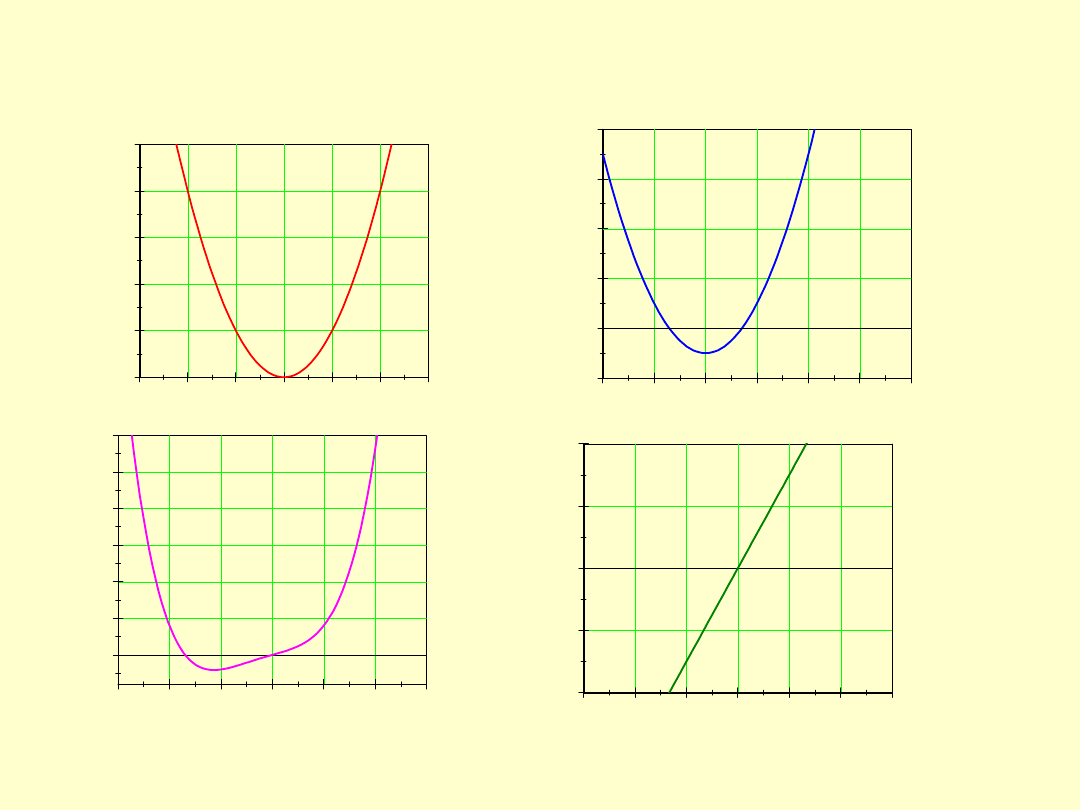
Pochodna funkcji
x
y
A(x
o
,y
o
)
B(x
1
,y
1
)
β
∆y
∆x
y
y
y
x
x
x
1
1
Pochodna funkcji
x
y
dx
dy
y
x
0
lim
α
tan
dx
dy
Pochodna funkcji w danym punkcie jest równa
współczynnikowi
kierunkowemu stycznej
do wykresu funkcji w tym punkcie.
Wyrażenie
dy = y’dx
nazywa się różniczką funkcji y = y(x),
dx
– jest różniczką
argumentu x.
2
2
dx
y
d
dx
dy
dx
d
Różniczkując pierwsza pochodną po x, otrzymamy drugą pochodną
itd……
1
0
)
(
dx
dc
c
x
y
c = const
2
dx
dy
c
dx
cy
d
)
(
3
dx
dy
dx
dy
dx
dy
y
y
y
2
1
2
1
4
dx
dy
y
y
dx
dy
dx
dy
y
y
y
2
1
2
1
2
1
Podstawowe wzory rachunku różniczkowego
5
2
2
2
1
2
1
2
1
y
dx
dy
y
y
dx
dy
dx
dy
y
y
y
6
dx
dy
dy
dz
dx
dz
x
g
y
y
f
z
)
(
),
(
Pochodna funkcji złożonej
Pochodne funkcji elementarnych
y=f(x)
y’
y=f(x)
y’
x
1
cosx
-sinx
x
n
nx
n-1
tgx
1/cos
2
x
e
x
e
x
ctgx
-1/sin
2
x
lnx
x
-1
a
x
a
x
lna
sinx
cosx


Z II zasady dynamiki, przy założeniu , wynika
- pęd ciała.
Siła działająca na ciało jest równa szybkości zmian pędu ciała.
Rozwiązując ostatnie równanie otrzymamy
Zmiana pędu ciała jest równa popędowi działającej siły
t
p
t
v
m
t
v
m
a
m
F
)
(
t
F
p
p
t
F
p
o
p
v
m
popęd siły
const
F
t
F
p
p
t
F
p
o
const
F
Jeśli
to możemy zapisać


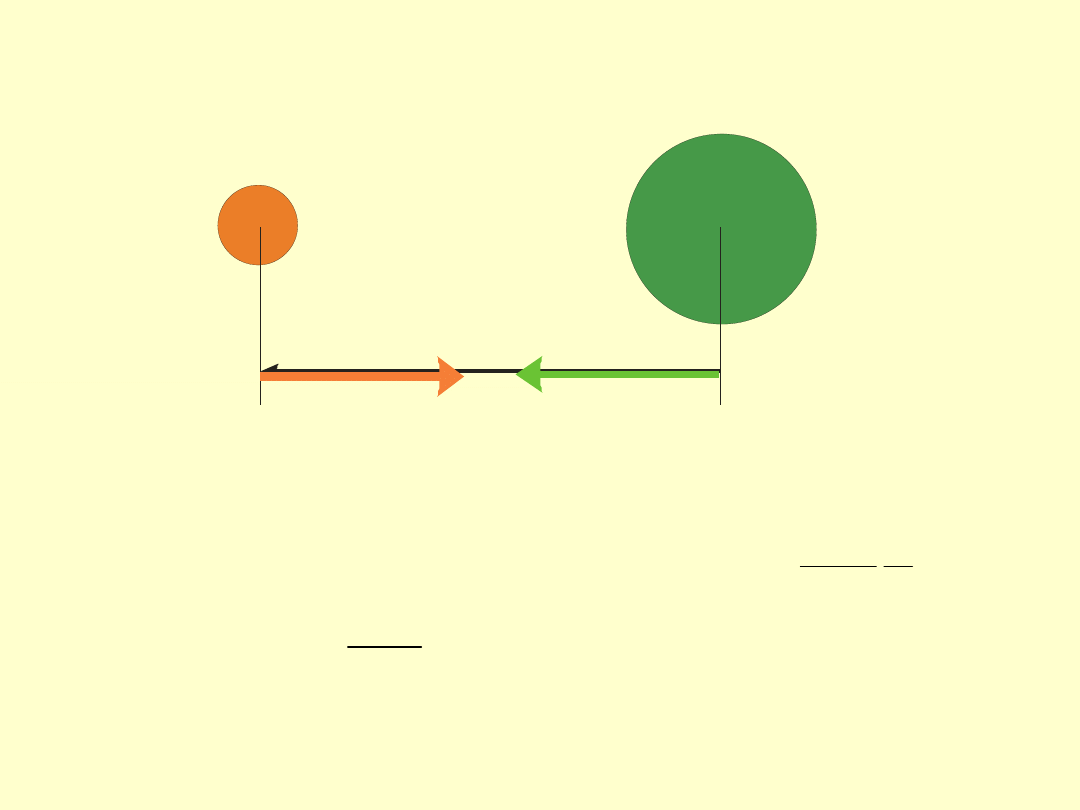
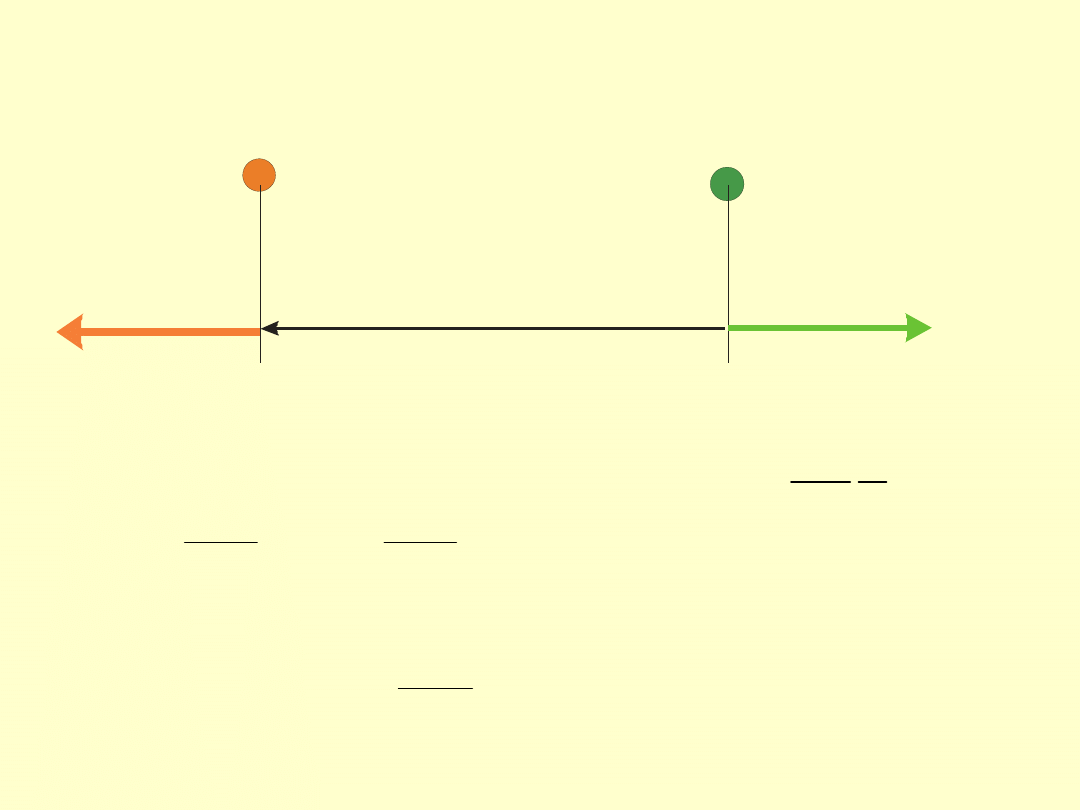
III zasada dynamiki
Wszelkie działanie jest równe przeciwdziałaniu.
Jeżeli ciało A działa na ciało B siłą to ciało B działa na
ciało A siłą równą co do wartości, ale o przeciwnym
zwrocie
AB
F
BA
F
BA
AB
F
F


Zasada zachowania pędu
Założenia:
• układ składa się z dwóch oddziałujących ze sobą cząstek
• nie ma żadnych sił zewnętrznych działających na ten układ.
Z II zasady dynamiki wynika, że
z III zasady dynamiki
const
p
p
t
p
p
t
p
t
p
2
1
2
1
2
1
0
t
p
F
t
p
F
2
2
1
1
,
Dopóki rozpatrujemy tylko siły
wewnętrzne
całkowity pęd układu
jest stały.
Zwiększenie
pędu jednej cząstki musi spowodować
zmniejszenie
pędu drugiej cząstki.
const
p
p
p
p
p
N
i
i
N
1
3
2
1
........
1
2
2
1
2
2
1
1
0
m
m
v
v
v
m
v
m
Uogólnienie dla układu N ciał
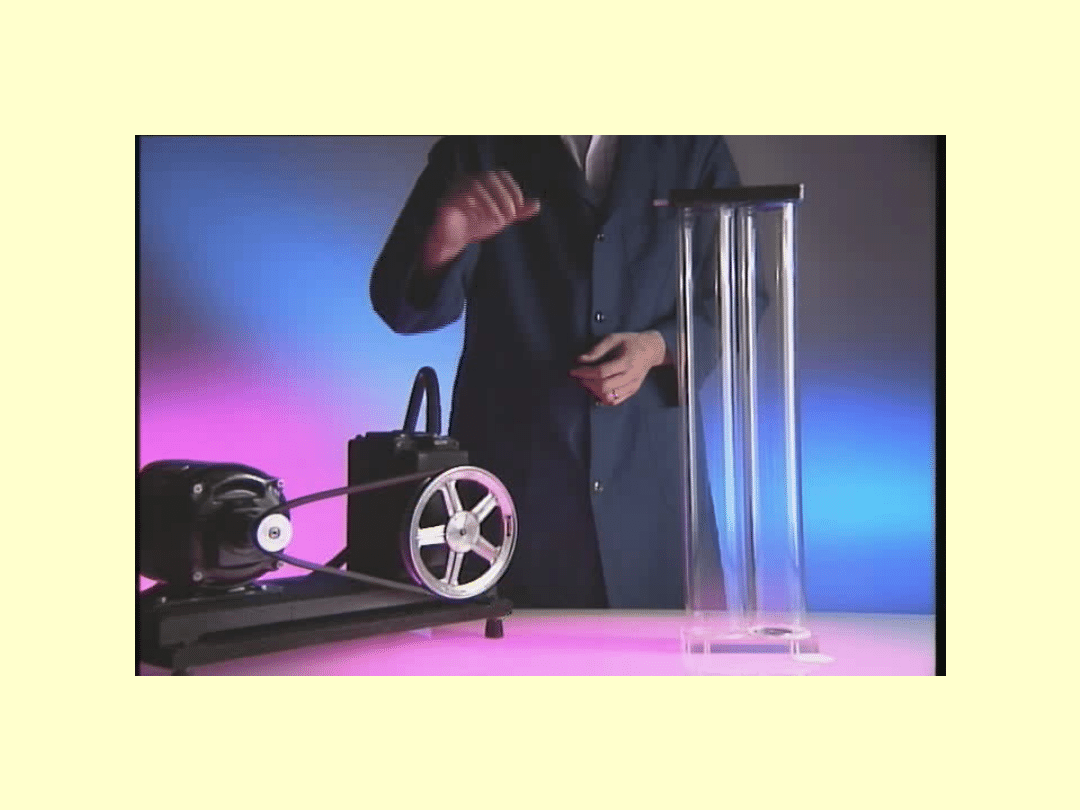
Napęd odrzutowy
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
Wyszukiwarka
Podobne podstrony:
dynamika ukladow hydraulicznych
Dynamika ukladow hydraulicznych Nieznany
w 3 dynamika ukladów liniowych
Dynamika ukladow mechatroniczny Nieznany
Kinematyka i Dynamika Układów Mechatronicznych
04 Własności dynamiczne układów liniowych
Dynamika układu punktów
3 dynamika ukladu punktow id 3 Nieznany (2)
Mechanika - Dynamika, dynamikawyklad12, DYNAMIKA UKŁADU PUNKTÓW MATERIALNYCH
Zakres mater Dynamika Ukladow nap 2010-11 ponumerowane, Semestr I, Dynamika układów napędowych, Mate
zadania dynamika Dynamika układu punktów
Dynamika ukladow hamiltonowskich
DTC - bezposrednie sterowamnie momentem, Semestr I, Dynamika układów napędowych, Materiały 2010-11
3wyklad-dynamika ukladu p. mater, Dynamika układu punktów materialnych
078 Pomocnik dynamika ukladow I i II rzedu a
DYNAMIKA UKLADOW LINIOWYCH id 1 Nieznany
Zakres mater Dynamika Ukladow nap 2010-11, Semestr I, Dynamika układów napędowych, Materiały 2010-11
2014 Zagadnienia na egzamin Kinematyka i Dynamika Układów Mechatro
więcej podobnych podstron