1
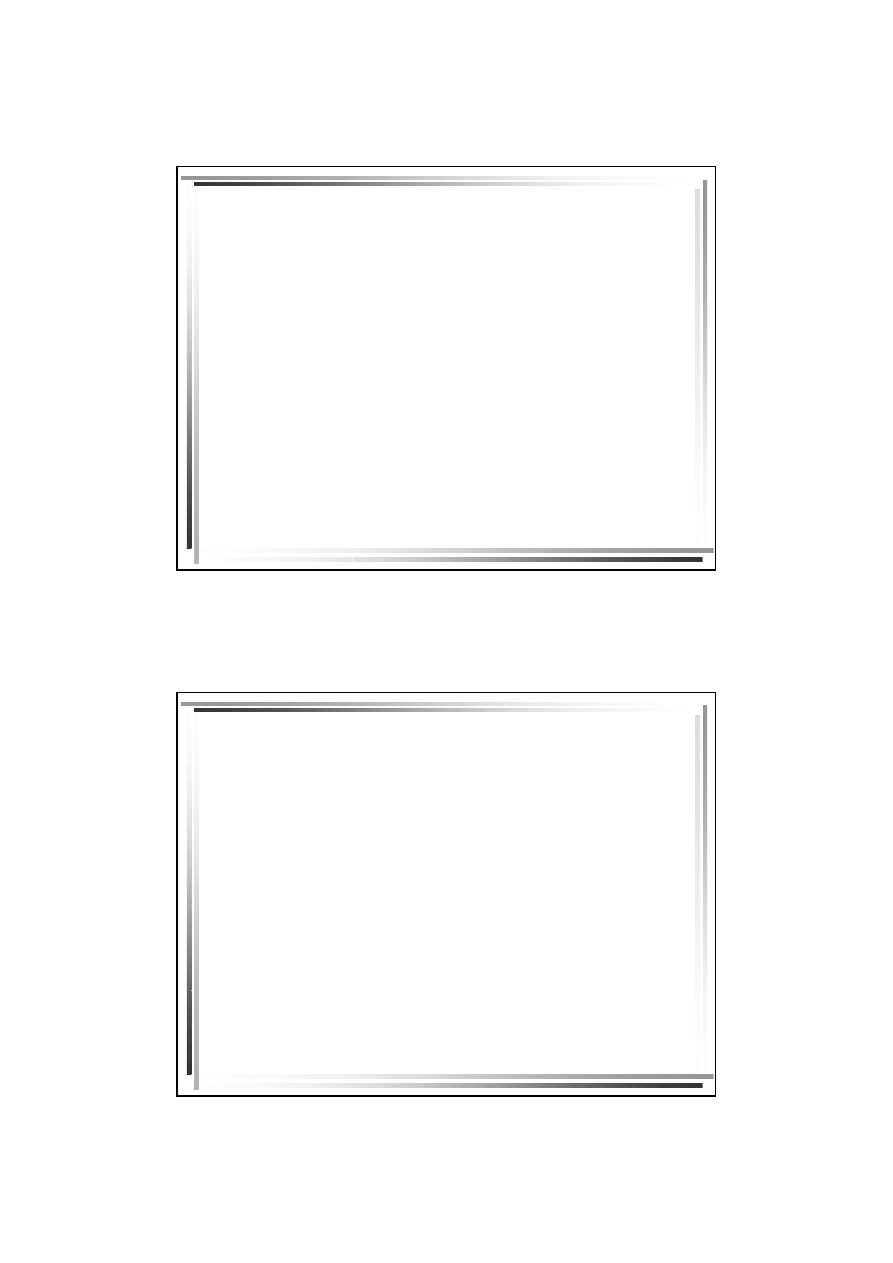
1
U
U
og
og
ó
ó
lnione wsp
lnione wsp
ó
ó
ł
ł
rz
rz
ę
ę
dne dla uk
dne dla uk
ł
ł
ad
ad
ó
ó
w
w
elektromechanicznych
elektromechanicznych
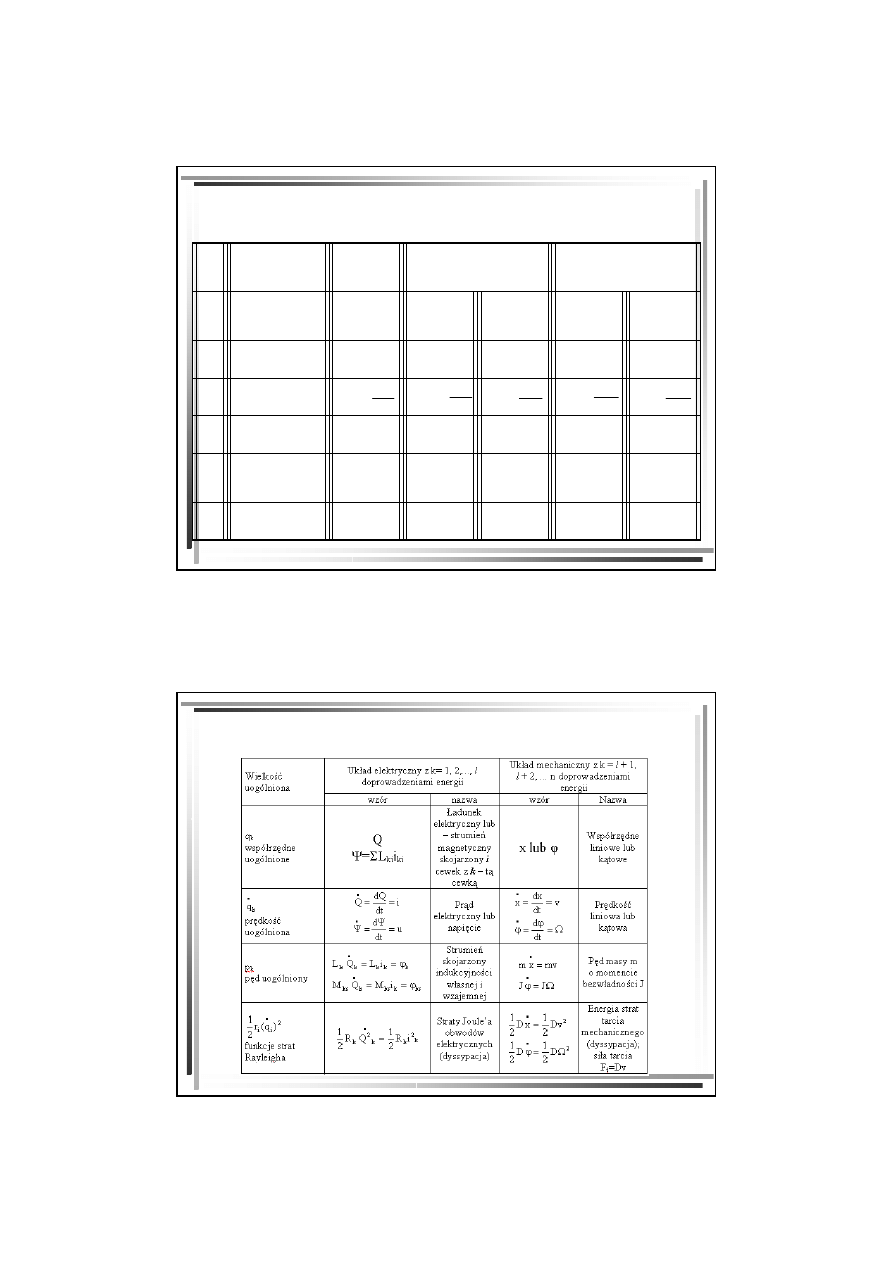
L.p.
Wielkość
Współrz.
Układ mechaniczny
Układ elektryczny
Uogólniona Ruch
postępowy
Ruch
obrotowy
Pojemność Indukcyjn.
1
Współrzędna
q
k
x
k
ϕ
k
Q
k
Ψ
k
2
Prędkość
3
Pęd
p
k
m
k
v
k
J
k
Ω
k
Ψ
k
=
ΣL
ki
i
ki
Q
k
=Cu
k
4
Siła
wewnętrzna
f
k
-k
k
x
k
-k
k
ϕ
k
-u
Ck
-i
Ck
5
Wymuszenie
G
k
F
k
(t)
M
k
(t)
U
k
(t)
i
k
(t)
dt
dq
v
k
k
=
dt
dx
v
k
k
=
dt
dQ
i
k
k
=
dt
d
u
k
k
Ψ
=
dt
d
k
k
ϕ
=
Ω
2
Wielkości układów elektrycznych i mechanicznych
2
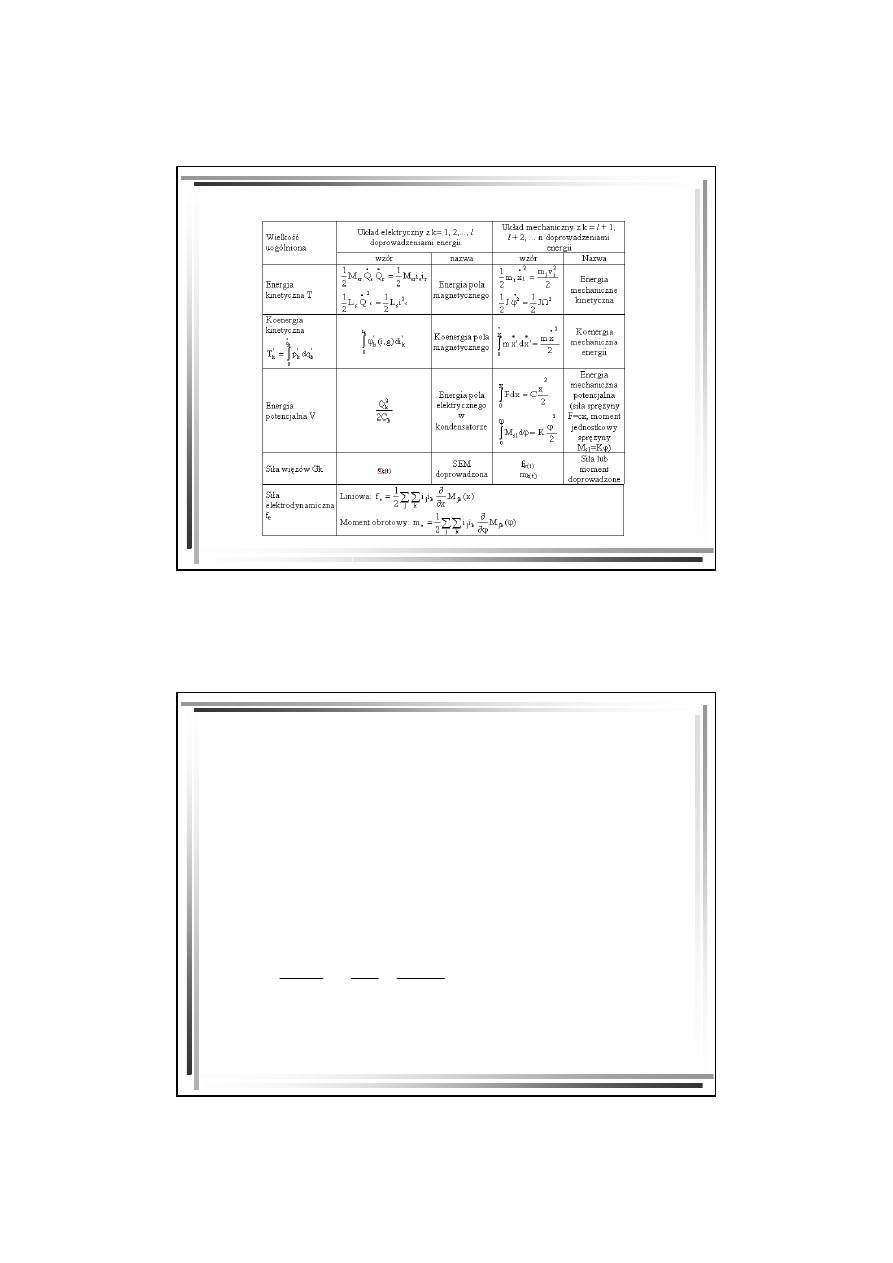
3
Wielkości układów elektrycznych i mechanicznych
(cd)
4
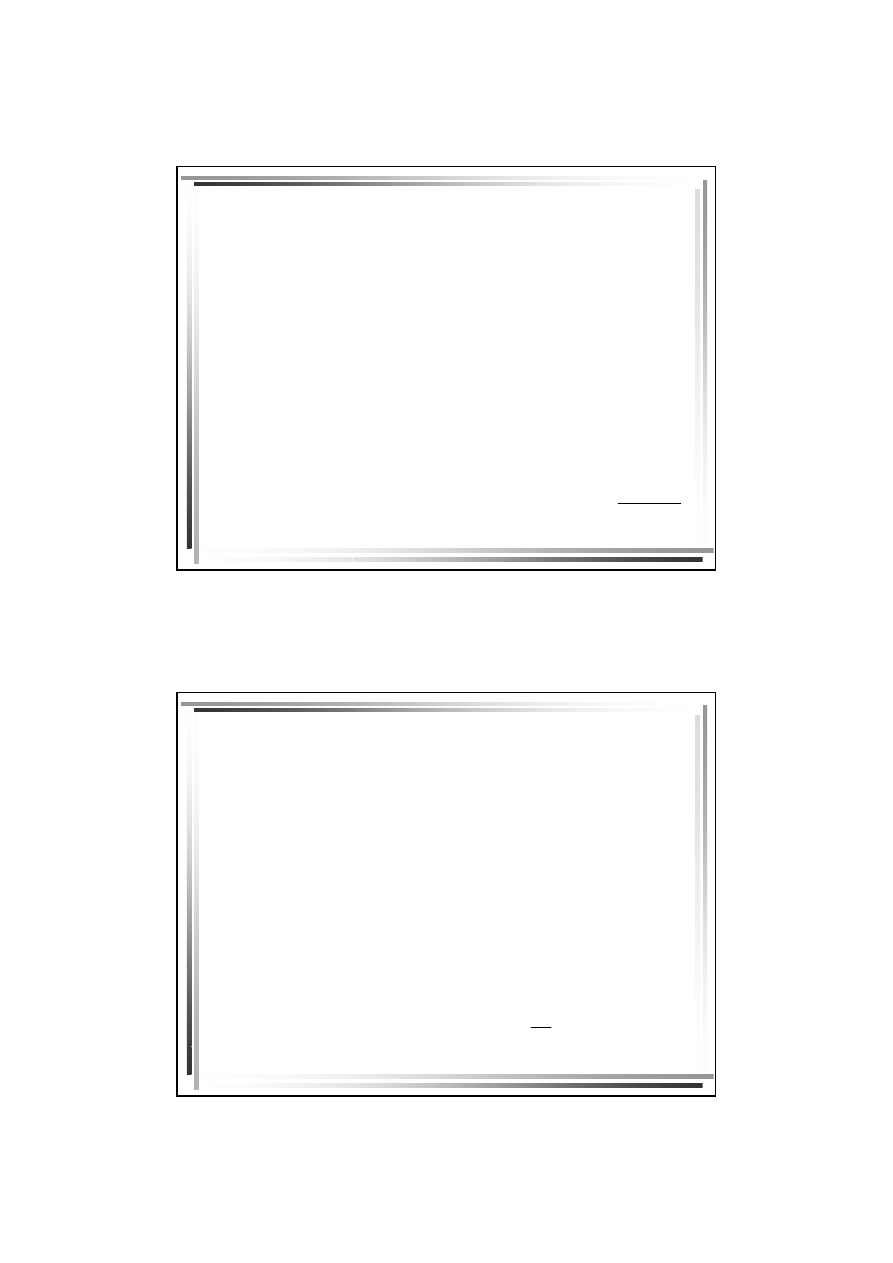
Równania Eulera-Langrange’a
•
Dla
układów konserwatywnych liniowych
funkcja
Lagrange’a przyjmie postać:
L = T – V
•
W tym przypadku równanie Eulera – Lagrange’a
ma postać:
•
gdzie (i=1,2,3,...,n).
0
q
L
dt
d
q
L
i
i
=
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
∂
∂
−
∂
∂
•
3
5
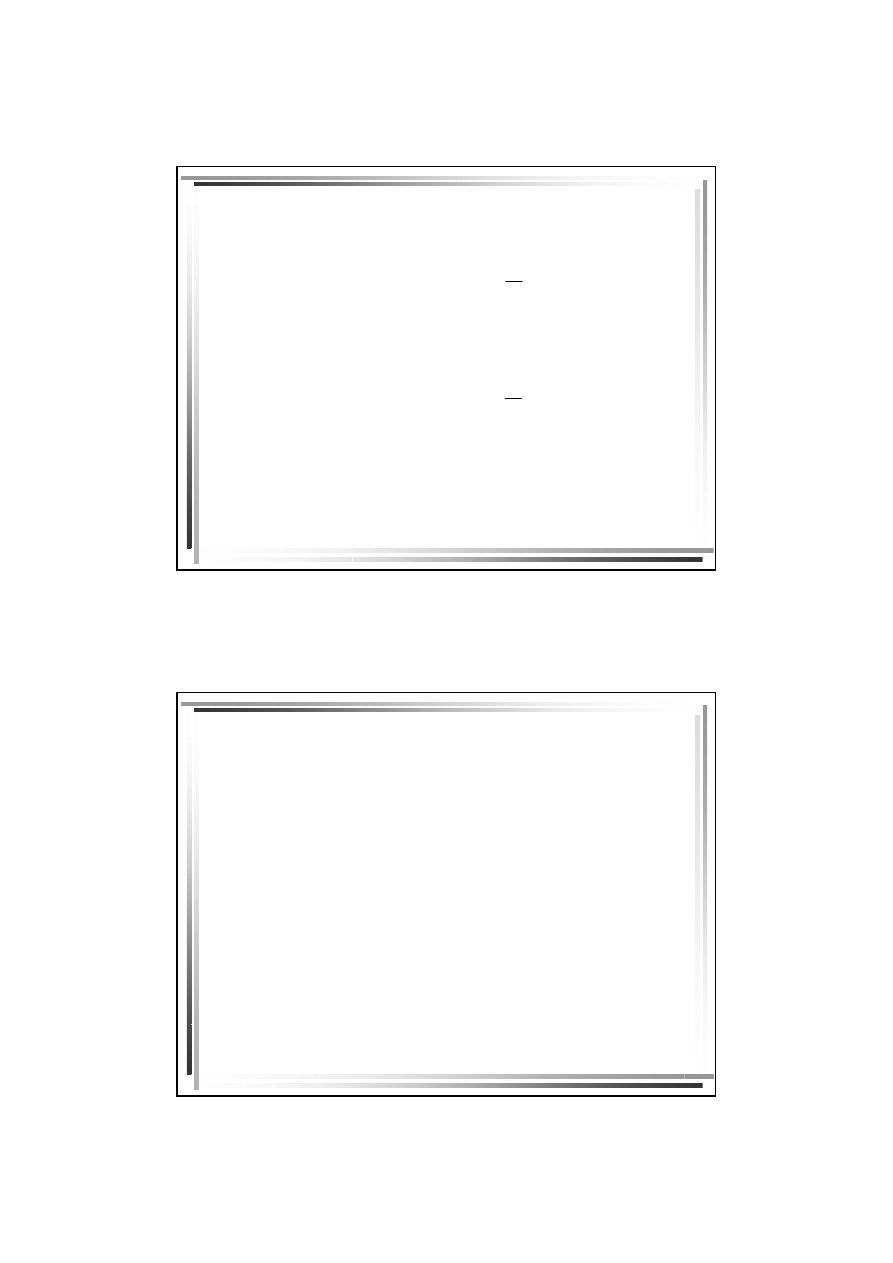
Równania Eulera-Langrange’a
•
Dla
układów dysypatywnych liniowych
należy uwzglednić
energię kinetyczna strat oraz energię potencjalną sił
więzów narzuconych przez zewnętrzne źródła energii.
•
W tym przypadku funkcja Lagrange’a przyjmie postać:
L
FQ
= (T + T
F
) – (V + V
Q
)
•
W przypadku
układów dysypatywnych nieliniowych
funkcja Lagrange’a przyjmuje postać:
L
FQ
= (T
’
+ T
F
’
) – (V + V
Q
)
gdzie T
’
– koenergia kinetyczna zmagazynowana w
układzie, przy czym dla układów liniowych T
’
= T.
∫
∫
−
=
=
k
q
0
'
k
k
G
t
0
F
dq
)
t
(
G
V
oraz
Fdt
T
6
Po podstawieniu L
FG
do równania *, po prostych
przekształceniach (pamiętając, że T
F
nie zależy od q
k
i
V
G
– od
) otrzymamy równanie Eulera-Lagrange’a
dla układu elekromechanicznego dysypatywnego (łac.
dissipare = rozpraszać), tzn. -dla układu zawierającego
straty mocy i źródła energii:
k
q
•
n
...,
,2,
1
k
G
q
F
q
L
dt
d
q
L
k
i
i
k
=
−
=
∂
∂
−
⎟⎟
⎟
⎠
⎞
⎜⎜
⎜
⎝
⎛
∂
∂
−
∂
∂
•
•
4
7
Funkcję stanu Lagrange 'a L dla układów liniowych
określamy jako różnicę energii kinetycznej T i
potencjalnej V
W przypadku układów nieliniowych, należy używać
bardziej ogólnej definicji funkcji Lagrange a:
L=T’-V
przy czym:
∫
∑
•
•
=
•
•
•
=
n
1
q
,...,
q
0
,...,
0
n
1
k
k
n
1
n
1
'
k
'
q
d
)
t
;
q
,...,
q
;
q
,...,
q
(
p
'
T
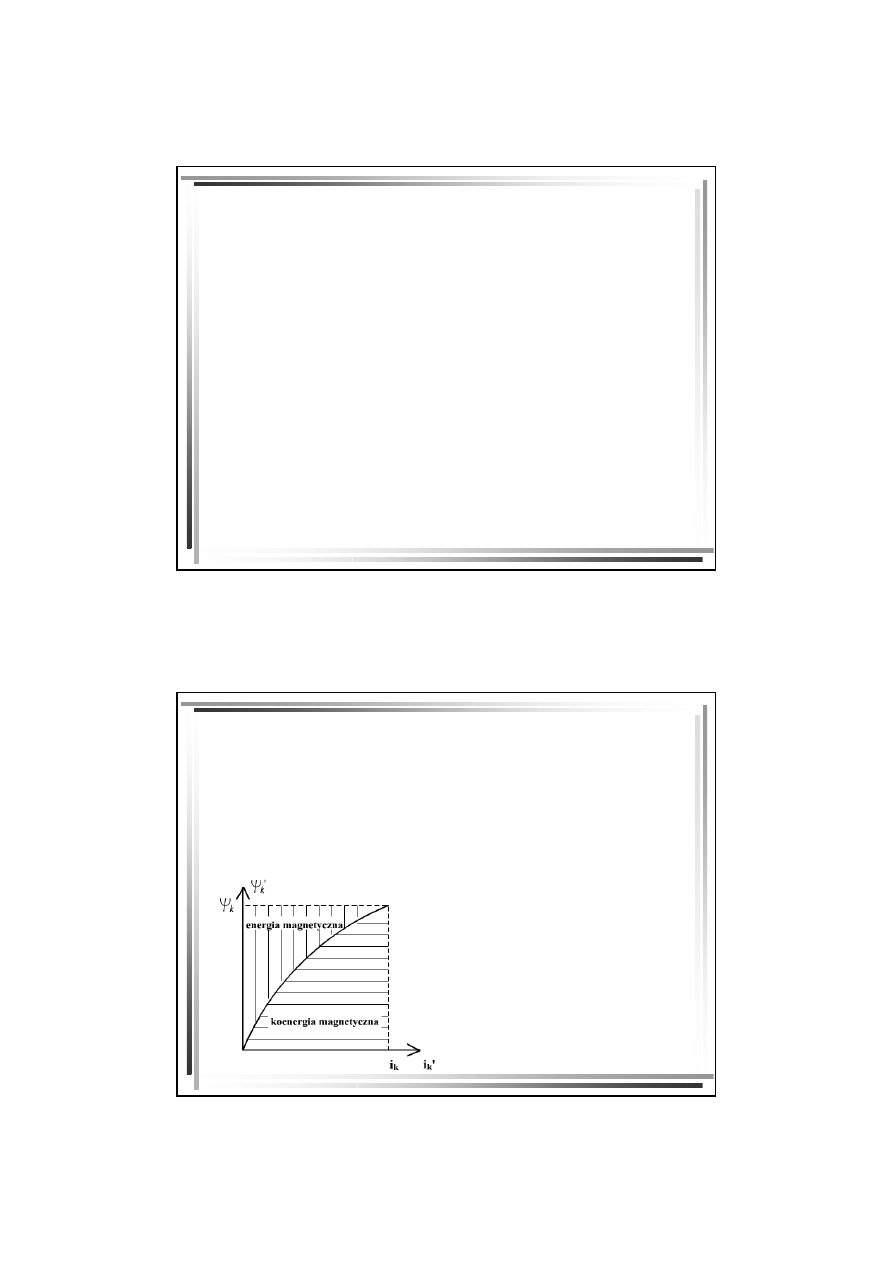
8
Koenergia kinetyczna, której całkowanie przeprowadza się
według
najdogodniejszej drogi jest charakterystyką
magnesowania i-tego magazynu energii.
Znakiem "prim" pod całką oznaczono zmienne całkowania,
a wielkości bez "prim" są granicami (p’
k
-oznacza pęd
uogólniony):
Koenergia k-tego
obwodu nieliniowego
5
9
Energia układu elektromechanicznego
Energię układu elektromechanicznego możemy
wyznaczyć z zależności:
- energia kinetyczna elektryczna układu
∑
∑
∫
=
=
Ψ
Ψ
=
=
Ψ
Ψ
=
n
1
j
j
kj
k
k
n
1
k
k
....
0
....
0
n
,.....,
k
,....,
1
j
i
)
i
,
x
(
M
d
)
t
(
i
T
n
1
(
3-22)
- koenergia kinetyczna elektryczna układu
∑
∑
∫
=
=
=
=
Ψ
Ψ
=
n
1
j
j
kj
k
k
n
1
k
k
i
....
i
0
....
0
'
n
,.....,
k
,....,
1
j
i
)
i
,
x
(
M
di
)
t
(
T
n
1
10
k
k
k
k
n
1
k
k
p
....
p
0
....
0
v
m
p
dp
)
t
(
v
T
n
1
=
=
∑
∫
=
- energia kinetyczna mechaniczna układu dla ruchu
postępowego:
- energia kinetyczna mechaniczna układu dla ruchu
obrotowego
k
k
k
k
n
1
k
k
p
....
p
0
....
0
J
p
dp
)
t
(
T
n
1
ω
=
ω
=
∑
∫
=
6
11
- koenergia kinetyczna mechaniczna układu dla ruchu
postępowego:
- kinetyczna mechaniczna układu dla ruchu obrotowego:
- energia potencjalna elektryczna (zmagazynowana w
kondensatorach)
k
n
1
k
k
k
v
....
v
0
....
0
'
dv
)
t
(
v
m
T
n
1
∑
∫
=
=
k
n
1
k
k
k
....
0
....
0
'
d
)
t
(
J
T
n
1
ω
ω
=
∑
∫
=
ω
ω
∫ ∑
=
=
−
−
=
n
1
Q
....
Q
0
....
0
n
1
k
k
k
Ck
k
Ck
C
)
t
(
Q
u
;
dQ
)
u
(
V
12
∫
∑
=
−
−
=
n
1
x
....
x
0
....
0
n
1
k
k
k
k
dx
)
x
k
(
V
∫
∑
ϕ
ϕ
=
ϕ
ϕ
−
−
=
n
1
....
0
....
0
n
1
k
k
k
k
d
)
k
(
V
∫
∑
=
=
=
=
t
0
.
n
1
k
2
k
k
'
F
F
)
i
(
R
2
1
F
dt
F
T
T
- energia potencjalna mechaniczna (zmagazynowana
w sprężynach) ruchu postępowego
- energia potencjalna mechaniczna (zmagazynowana
w sprężynach) ruchu obrotowego
- energia i koenergia kinetyczna strat (dysypatywna)
elektryczna
7
13
∫
∑
=
=
=
=
t
0
.
n
1
k
2
k
k
'
F
F
)
v
(
D
2
1
F
dt
F
T
T
∫
∑
=
ω
=
=
=
t
0
.
n
1
k
2
k
k
'
F
F
)
(
D
2
1
F
dt
F
T
T
∫
∑
=
−
=
−
=
k
Q
0
.
n
1
k
k
k
Q
k
k
Q
Q
)
t
(
U
V
dQ
)
t
(
U
V
- energia i koenergia kinetyczna strat (dysypatywna)
mechaniczna ruchu postepowego
- energia i koenergia kinetyczna strat (dysypatywna)
mechaniczna ruchu obrotowego
- energia potencjalna elektryczna sił więzów
narzuconych przez zewnętrzne źródła
14
∫
∑
=
−
=
−
=
k
x
0
.
n
1
k
k
k
Q
k
k
Q
x
)
t
(
F
V
dx
)
t
(
F
V
∫
∑
ϕ
=
ϕ
−
=
ϕ
−
=
k
0
.
n
1
k
k
k
Q
k
k
Q
)
t
(
M
V
d
)
t
(
M
V
- energia potencjalna mechaniczna sił zewnętrznych
przy ruchu postępowym
- energia potencjalna mechaniczna sił zewnętrznych
przy ruchu obrotowym
Wyszukiwarka
Podobne podstrony:
Dynamika ukladow hydraulicznych Nieznany
Kinematyka i Dynamika Układów Mechatronicznych
2014 Zagadnienia na egzamin Kinematyka i Dynamika Układów Mechatro
Kinematyka i Dynamika Układów Mechatronicznych
DYNAMIKA UKLADOW LINIOWYCH id 1 Nieznany
czlony dynamiczne id 128806 Nieznany
zestaw 5 dynamika punktu materi Nieznany
Badanie podstawowych ukladow cy Nieznany (2)
Lab5 Modelowanie dynamiki id 25 Nieznany
modelowanie ukladow przelaczaja Nieznany
2 Badanie ukladow dopasowania i Nieznany
Dynamika id 145246 Nieznany
06 Analizowanie ukladow elektry Nieznany (2)
Modele matematyczne ukladow reg Nieznany
analiza dynamiczna obiektow mec Nieznany
IMW W03 Modelowanie ukladow id Nieznany
więcej podobnych podstron