Charakterystyki częstotliwościowe
Ogólnie dowolną transmitancję można przedstawić w
postaci czynnikowej:
czyli zbudowanej z członów podstawowych:
, ,
gdzie wprowadziliśmy częstość znormalizowaną
=T.
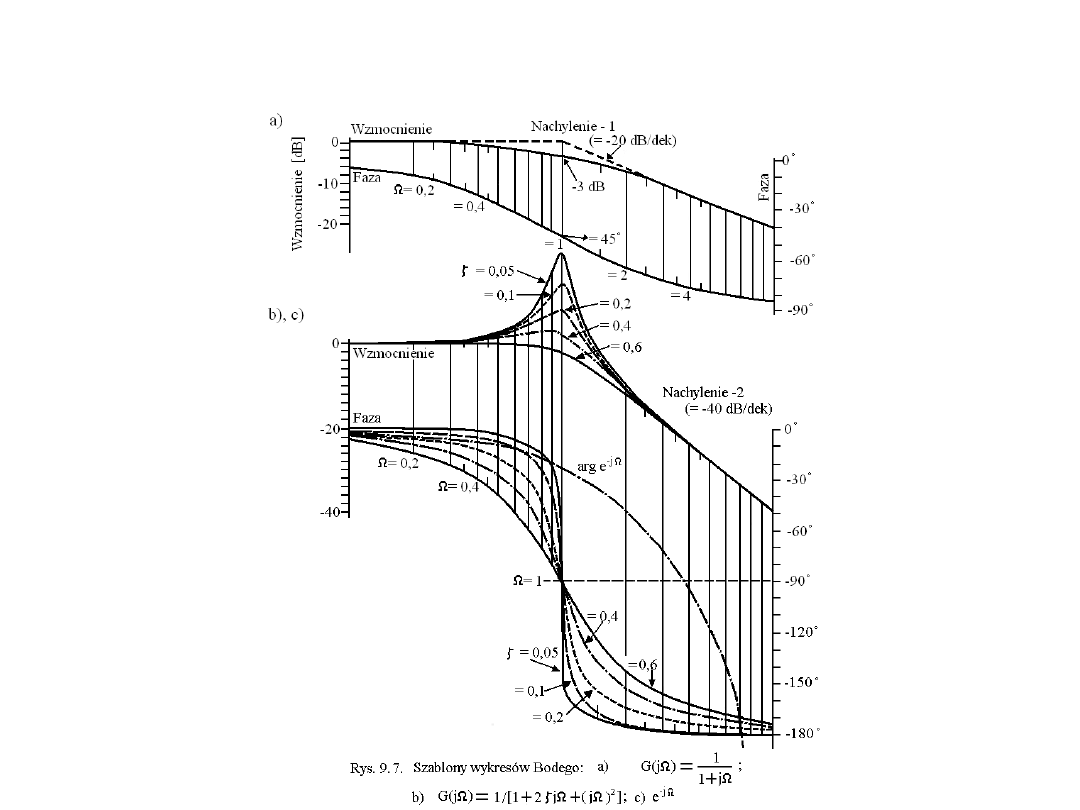
Wykresy Bodego tych członów z wykładnikiem –1
przedstawia poniższy rysunek
]
2
1
[
1
]
2
1
[
1
2
2
s
T
s
T
s
T
s
s
T
s
T
s
T
s
k
s
G
m
m
m
i
N
l
l
l
j
L
1
1
j
1
2
2
1
j
j
l
Charakterystyki częstotliwościowe

Minimalnofazowość układu
• Jak widzimy, po przekroczeniu częstości =1, charakterystyki
amplitudowe spadają w tempie –20dB/dek lub –40dB/dek.
Natomiast fazy dążą odpowiednio do: -90o oraz -180o. Mamy
więc ścisły związek pomiędzy charakterystyką fazową i
charakterystyką amplitudową. Takie układy nazywamy
minimalnofazowymi. Powyższe spostrzeżenia nie dotyczą członu
opóźniającego typu e-sT.
• Dla wykładnika +1 (czynniki w liczniku transmitancji) znaki na
osiach rzędnych zmieniają się na dodatnie. Tym samym wykresy
dla przypadku +1 oraz –1 są lustrzanymi odbiciami względem
osi 0[dB] i 0[deg].
• Układy, w których występują zera, zlokalizowane w LPP,
nazywamy układami nieminimalnofazowymi. Jak się okaże
później obiekty nieminimalnofazowe są kłopotliwe w sterowaniu.
• Niestety, sterowanie cyfrowe wprowadza dodatkowe opóźnienie
w przesyłaniu sygnału, które związane jest z z okresem
próbkowania. Tym samym układy ze sterowaniem cyfrowym
należy zaliczyć do układów nieminimalnofazowych. Opóźnienie
fazowe można ograniczyć przez zmniejszenie okresu
próbkowania.
Aproksymacja Pade
• Aproksymacja Pade stanowi bardzo dogodny do obliczeń sposób
przybliżania transmitancji członu opóźniającego przez pewną
transmitancję będącą funkcją wymierną w dowolnie szerokim (ale
skończonym) zakresie częstotliwości. Aproksymacja polega na
przedstawieniu transmitancji linii opóźniającej o
• opóźnieniu transportowym To w postaci ilorazu:
• .
• Następnie rozkłada się oddzielnie licznik i mianownik powyższego
wyrażenia w szereg potęgowy. Gdy ograniczymy się do wyrazów
liniowych, to mamy:
• Tę aproksymację nazywamy aproksymacją Pade 1-go rzędu.
Pozwala ona sprowadzić transmitancję niewymierną do
transmitancji w postaci wymiernej. Zauważmy, że aproksymacja
wprowadza zero leżące w lewej półpłaszczyźnie (LPP) zmiennej
zespolonej s. Układy, w których występują zera, zlokalizowane w
LPP, nazywamy układami nieminimalnofazowymi.
2
2
0
0
0
T
s
T
s
sT
e
e
e
2
1
2
1
0
0
0
T
s
T
s
e
sT
Stabilność
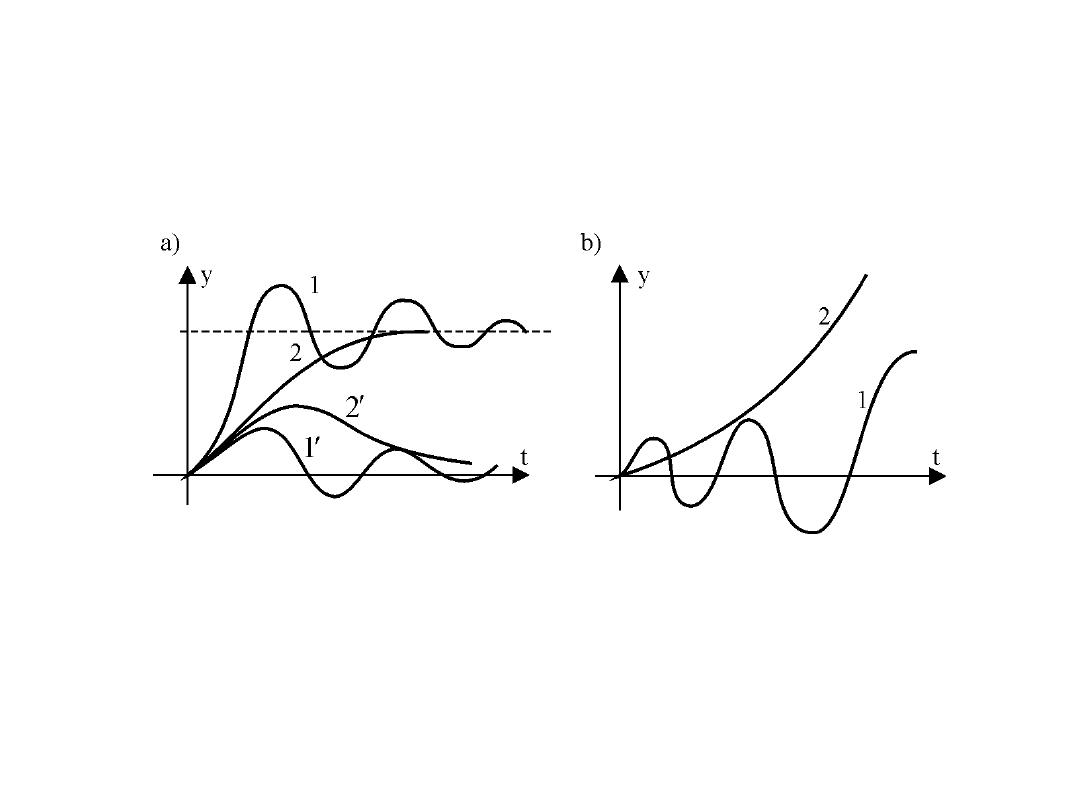
• Stabilność jest to własność układu dynamicznego, polegająca na powracaniu układu,
po ustaniu działania zakłócenia, do pierwotnego stanu ustalonego lub na osiąganiu
nowego stanu ustalonego, jeśli zakłócenie pozostało na stałym poziomie. Przebiegi
przejściowe tej wielkości dla układów stabilnych i niestabilnych pokazano na rysunku
• W niniejszym rozdziale ograniczymy się do pokazania metod badania stabilności
układów liniowych. Omówienie stabilności układów nieliniowych przestawione później.
• Jak pokażemy, badanie stabilności układu liniowego można sprowadzić do badania
rozwiązań równań opisujących dynamikę badanego obiektu. W epoce komputerów i
dostępnego oprogramowania jest to zadanie stosunkowo proste. Jednakże rozwiązanie
równań przeprowadza się dla ustalonego zestawu parametrów i często trudno jest na
podstawie takiego rozwiązania wyciągnąć ogólne wnioski, co do zachowania się układu
w przypadku zmiany tych parametrów oraz wnioski, co do zasad projektowania układu
sterowania dla badanego obiektu. Takie możliwości dają kryteria stabilności.

Badanie rozwiązań równań
dynamicznych
•
. Zachowanie się liniowego układu w stanie nieustalonym opisuje równanie o postaci:
•
.
•
W stanie ustalonym (stanie równowagi) pochodna jest równa zero, mamy więc:
•
.
•
Rozważmy dwa przypadki. W pierwszym zakładamy, że macierz A jest nieosobliwa. Jeśli
przyjmiemy, że nie ma wymuszenia u(t), to:
•
Ax(t)=0
.
•
Gdy A jest macierzą nieosobliwą, to aby powyższe było spełnione, musi być: x(t) =0.
•
Początek przestrzeni stanu: x=0 jest więc punktem równowagi, zwanym również punktem
osobliwym. Pozostaje oczywiście pytanie, czy jest to punkt równowagi stabilnej, to
znaczy, czy układ po wytrąceniu z tego punktu przez oddziaływania zewnętrzne z
powrotem do niego wraca po ustaniu przyczyny. Aby to ustalić rozpatrzymy układ w
stanie ustalonym, gdy działa stałe w czasie wymuszenie: u=const. Wówczas:
•
•
W tym przypadku punkt równowagi x ustalony jest przez stałą wartość u. Oczywiście, gdy
ustanie działanie sygnału u, to układ wróci do początku przestrzeni stanu: x=0 w czasie
procesu przejściowego, pod warunkiem, że układ jest stabilny.
•
W drugim przypadku, gdy macierz A jest macierzą osobliwą, to wówczas punkt: x=0 nie
jest punktem równowagi. Tym samym równaniem równowagi jest:
»
.
Ax=0
t
t
t
Bu
Ax
x
t
t Bu
Ax
0
)
(
1
Bu
A
x

Badanie rozwiązań równań
dynamicznych
• Jak wynika z powyższych rozważań, o stabilności decyduje
zachowanie się układu podczas procesu przejściowego. Proces
przejściowy opisuje rozwiązanie ogólne (całka ogólna)
jednorodnego równania stanu:
• dx(t)/dt=Ax(t)
Jak
wiemy rozwiązanie ogólne równania stanu ma postać:
•
• W przypadku sygnału wyjść (pomiaru), po uwzględnieniu: y=Cx,
mamy:
• .
•
• Widzimy więc, ze o przebiegu procesu przejściowego decyduje
macierz fundamentalna zbudowana z funkcji wykładniczych
postaci:
• .
• Części rzeczywiste α wykładników muszą być ujemne, aby całka
była zbieżna do zera.
x
x
A
t
e
t
x
C
y
A
t
e
t
sin
cos
)
(
j
e
e
a
j
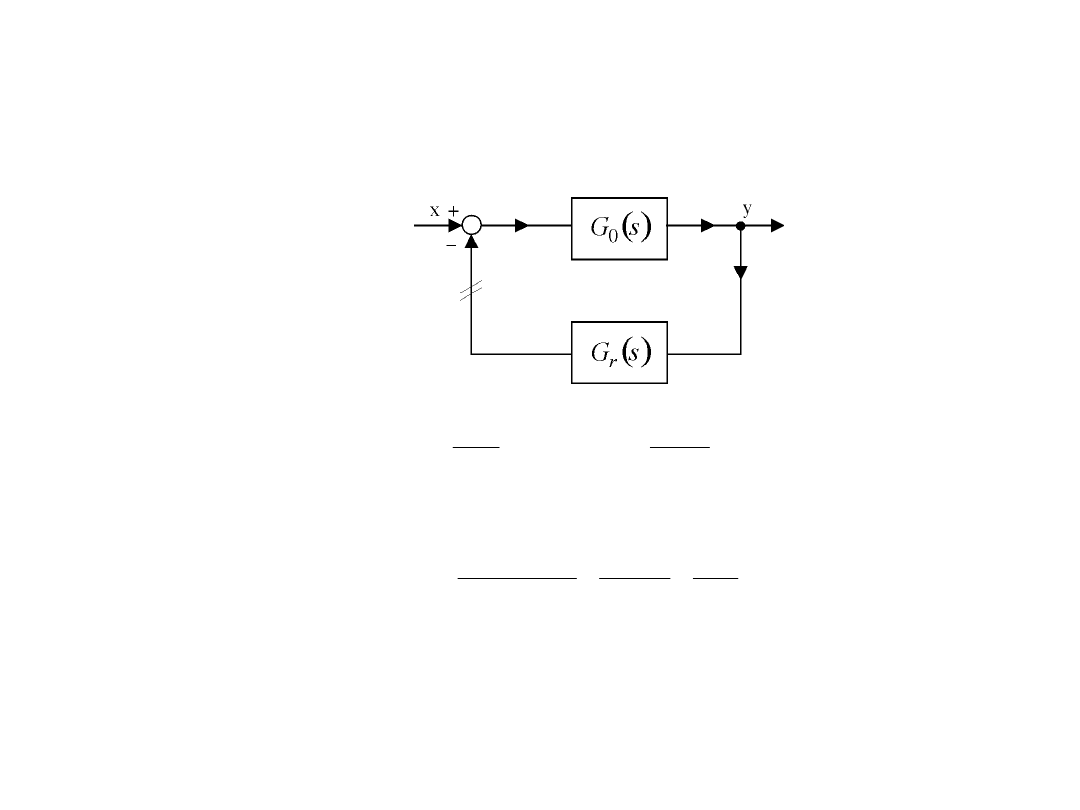
Układ otwarty i zamknięty
•
Kryterium Nyquista pozwala badać stabilność zamkniętego układu automatyki na podstawie
przebiegu charakterystyki amplitudowo-fazowej układu otwartego. Wyznaczenie
charakterystyki amplitudowo-fazowej jest możliwe zarówno poprzez analizę jak i
doświadczalnie.
•
Transmitancja operatorowa układu otwartego, otrzymanego przez przerwanie pętli sprzężenia
zwrotnego, wynosi:
•
Wielomian Mo(s) przyrównany do zera:
•
•
jest równaniem charakterystycznym n-go stopnia układu otwartego. Transmitancja operatorowa
układu zamkniętego wynosi:
•
Równanie:
•
lub
•
jest więc równaniem charakterystycznym n-tego stopnia układu zamkniętego, gdyż stopień
wielomianu Lo(s) jest mniejszy od stopnia wielomianu Mo(s) układu otwartego.
.
0
0
s
M
s
L
s
G
s
G
s
X
s
Y
s
G
o
r
.
'
1
1
0
0
0
s
M
s
L
s
G
s
G
s
G
s
G
s
G
s
G
r
0
)
(
s
M
o
0
)
(
'
1
)
(
s
G
s
M
0
)
(
)
(
)
(
0
0
s
L
s
M
s
M
Warunek stabilności
• Warunek stabilności układu zamkniętego sformułujemy po
zbadaniu przyrostu argumentu funkcji dla pulsacji od zera do
nieskończoności:
• Przypadek 1 — układ otwarty jest stabilny. Jego równanie
posiada n pierwiastków w lewej półpłaszczyźnie.
• Zgodnie z kryterium Michałowa:
• Oraz
• Zmiana argumentu funkcji jest równa różnicy zmian argumentu
licznika i mianownika:
• Stąd:
j
M
j
M
j
G
0
0
arg
0
'
1
arg
2
arg
0
0
n
j
M
.
2
arg
0
n
j
M
.
arg
arg
'
1
arg
0
0
0
0
j
M
j
M
j
G
.
0
2
2
'
1
arg
0
n
n
j
G
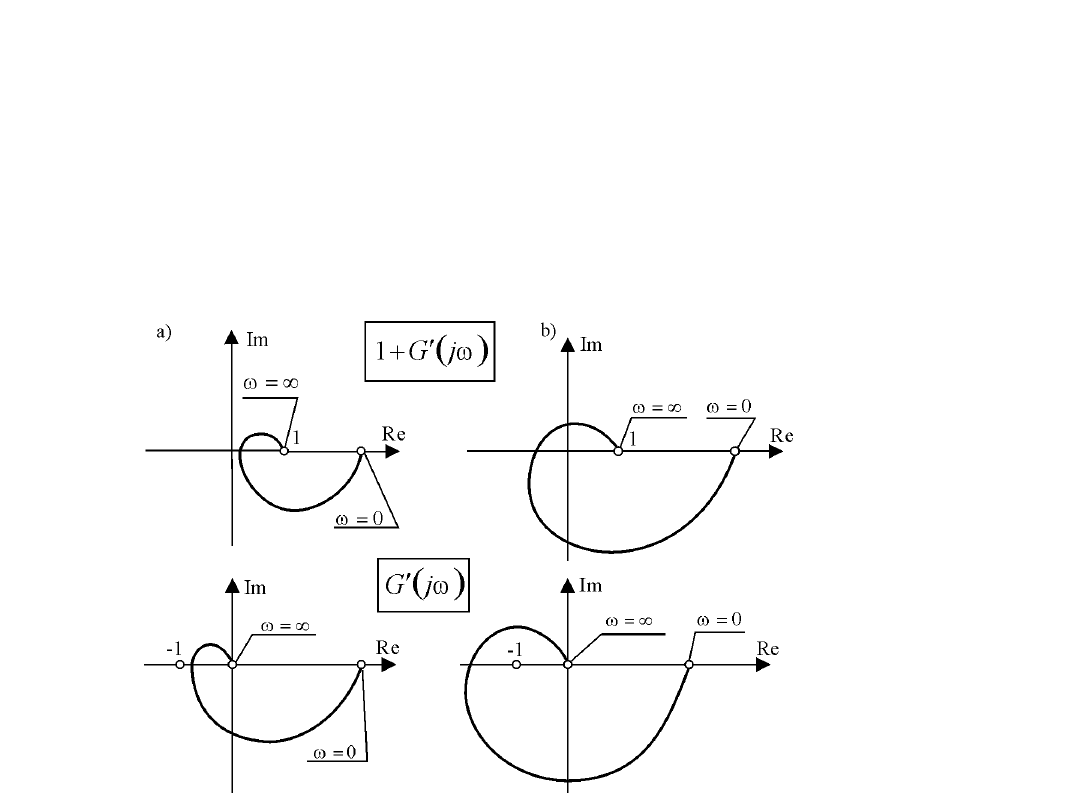
Kryterium Nyquist’a
• Opierając się na powyższym warunku można sformułować kryterium
Nyquista.
• Układ zamknięty jest stabilny, jeżeli charakterystyka amplitudowo-
fazowa układu otwartego nie obejmuje punktu dla pulsacji
zmieniającej się od 0 do . Przykładowe wykresy krzywych oraz
układów stabilnych (a) i niestabilnych (b) pokazano na rysunku.
Kryterium Nyquist’a
• Przypadek 2 - układ otwarty jest niestabilny. Jego równanie
charakterystyczne zawiera m pierwiastków w prawej półpłaszczyźnie, a
pozostałe (n-m) w lewej półpłaszczyźnie płaszczyzny pierwiastków.
• Zgodnie z kryterium Michajłowa zmiana argumentu równania
charakterystycznego układu otwartego wynosi:
• Układ zamknięty będzie stabilny, jeśli zmiana argumentu równania
charakterystycznego będzie równa:
• Warunek stabilności na podstawie zależności (10.30) można zapisać
następująco:
•
• Opierając się na powyższym warunku można sformułować kryterium
Nyquist’a dla przypadku, gdy układ otwarty jest niestabilny.
• Jeżeli otwarty układ automatyki jest niestabilny, a jego równanie
charakterystyczne posiada pierwiastków w prawej półpłaszczyźnie
płaszczyzny pierwiastków, to będzie on stabilny po zamknięciu, jeśli
charakterystyka amplitudowo – fazowa układu otwartego dla pulsacji
zmieniającej się od 0 do ∞ okrąża n-m razy punkt w kierunku dodatnim
(przeciwnym do ruchu wskazówek zegara).
.
2
2
0
arg
0
m
n
j
M
0
s
M
.
2
arg
0
n
j
M
.
2
2
2
2
2
'
1
arg
0
m
m
n
n
s
G
Logarytmiczne kryterium
Nyguista. Zapas stabilności
• Z warunku stabilności układu
zamkniętego wynika, że wykres
nie może obejmować początku
układu współrzędnych, natomiast
nie może obejmować punktu
. Stąd:
• dla ,
• Warunek ten można zapisać:
•
j
G'
1
j
G'
0
,
1 j
j
G
arg
.
0
log
20
j
G
L
1
j
G
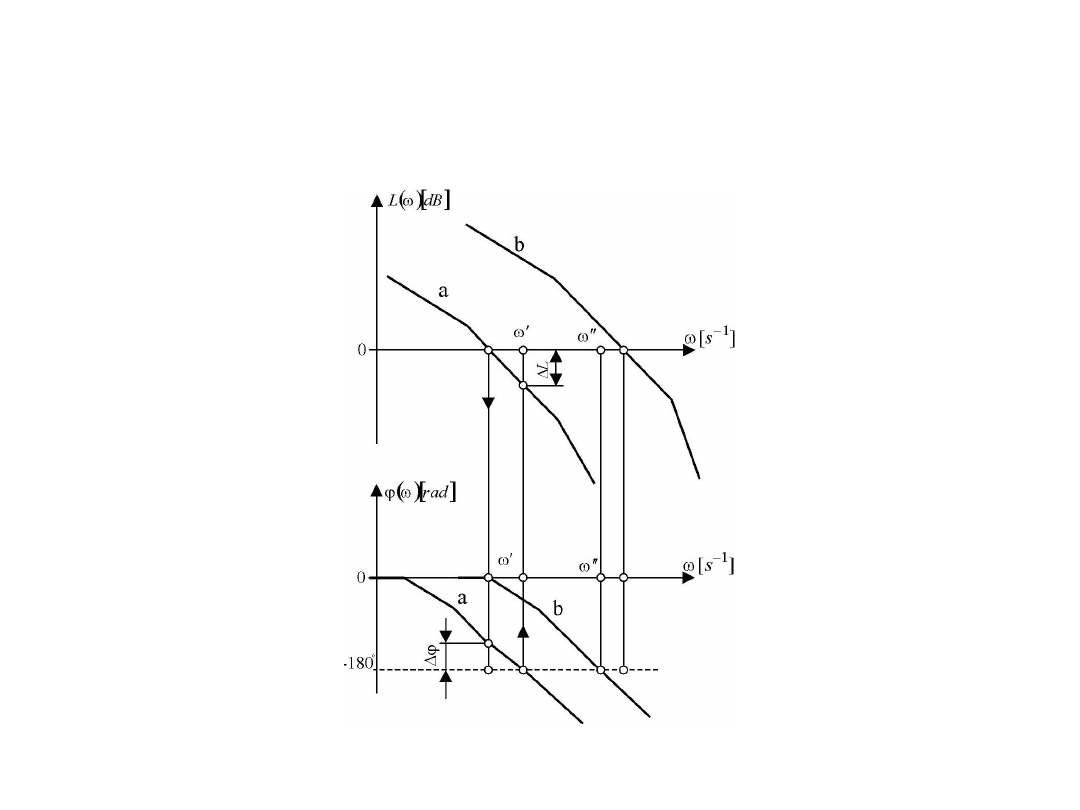
Zapas modułu i fazy
Zapas modułu i fazy
• Na podstawie powyższych warunków można sformułować
logarytmiczne kryterium Nyquista w sposób następujący.
Zamknięty układ jest stabilny, jeżeli charakterystyka
amplitudowa układu otwartego ma wartość ujemną
przy pulsacji odpowiadającej przesunięciu fazowemu
. Na powyższym rysunku przedstawiono
logarytmiczne charakterystyki amplitudowe i fazowe
układów otwartych, przy czym: a – układ zamknięty
stabilny, b – układ zamknięty niestabilny. Oznaczone na
rysunku :
• - zapas modułu [dB],
• - zapas fazy [rad],
• stanowią liczbową ocenę zapasu stabilności. Przeciętne
wartości tych parametrów w układach przemysłowych
wynoszą ,
0
'
L
'
'
L
dB
L 6
.
4
3
2
1
rad

Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
Wyszukiwarka
Podobne podstrony:
Zagadnienia na egzamin z Automatyki 13
14a automatyzacja procesów w zarządzaniu info, Procesy informacyjne w zarządzaniu, materiały student
energo sprawko 13, Automatyka i robotyka air pwr, VI SEMESTR, Energoelektronika 2, cw13
patofizjo 13 II termin (Automatycznie zapisany) (Automatycznie zapisany)
Mikrobiologia spr12 13 (Automatycznie zapisany)
automatyka i sterowanie wyklad 13
Automatyka i regulacja 13
AUTOMATIC TRANSAXLE DRIVE AXLE SECTION 3A 13
13 ZMIANY WSTECZNE (2)id 14517 ppt
13 zakrzepowo zatorowa
Zatrucia 13
FESTO Podstawy automatyzacji
pz wyklad 13
13 ALUid 14602 ppt
pz wyklad 13
Automatyka (wyk 3i4) Przel zawory reg
więcej podobnych podstron