Człowiek- najlepsza inwestycja
Projekt współfinansowany przez Unię Europejską
w ramach Europejskiego Funduszu Społecznego
Podstawy
Podstawy
Automatyki
Automatyki
Podstawy
Podstawy
Automatyki
Automatyki
Politechnika Warszawska
Instytut Automatyki i Robotyki
Dr inż. Wieńczysław Kościelny
PODSTAWY AUTOMATYKI
część 2
Podstawy układów sekwencyjnych
Podstawy układów sekwencyjnych
3
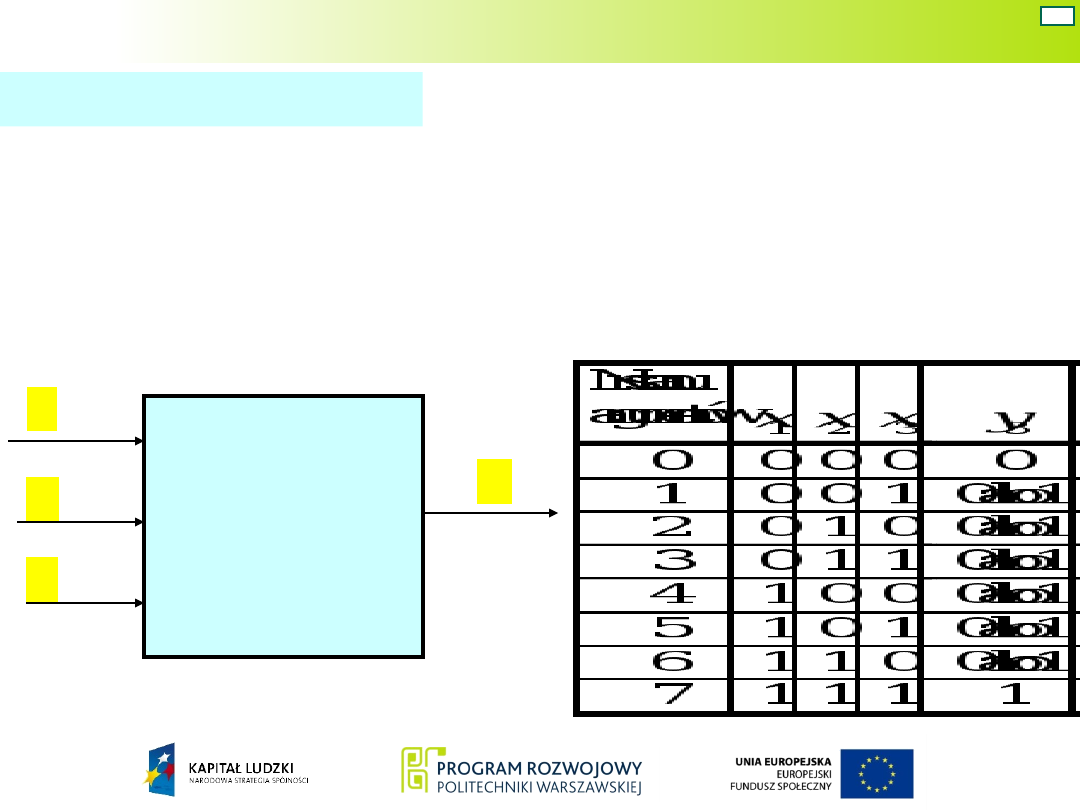
Posłużmy się ponownie przykładem jednego z wariantów układu
sterowania wentylacją pomieszczenia. Binarny sygnał wyjściowy y
3
układu (y
3
= 0 - silnik wentylatora nie pracuje; y
3
= 1 - silnik
pracuje), jest wytwarzany na podstawie binarnych sygnałów
wejściowych x
1
, x
2
i x
3
z przekaźników temperatury
rozmieszczonych w tym pomieszczeniu, zgodnie z tablicą.
Jest to układ sekwencyjny procesowo-zależny.
Układ sterowania
wentylacją
1
x
2
x
3
x
3
y
Pojęcia podstawowe

Podstawy układów sekwencyjnych
4
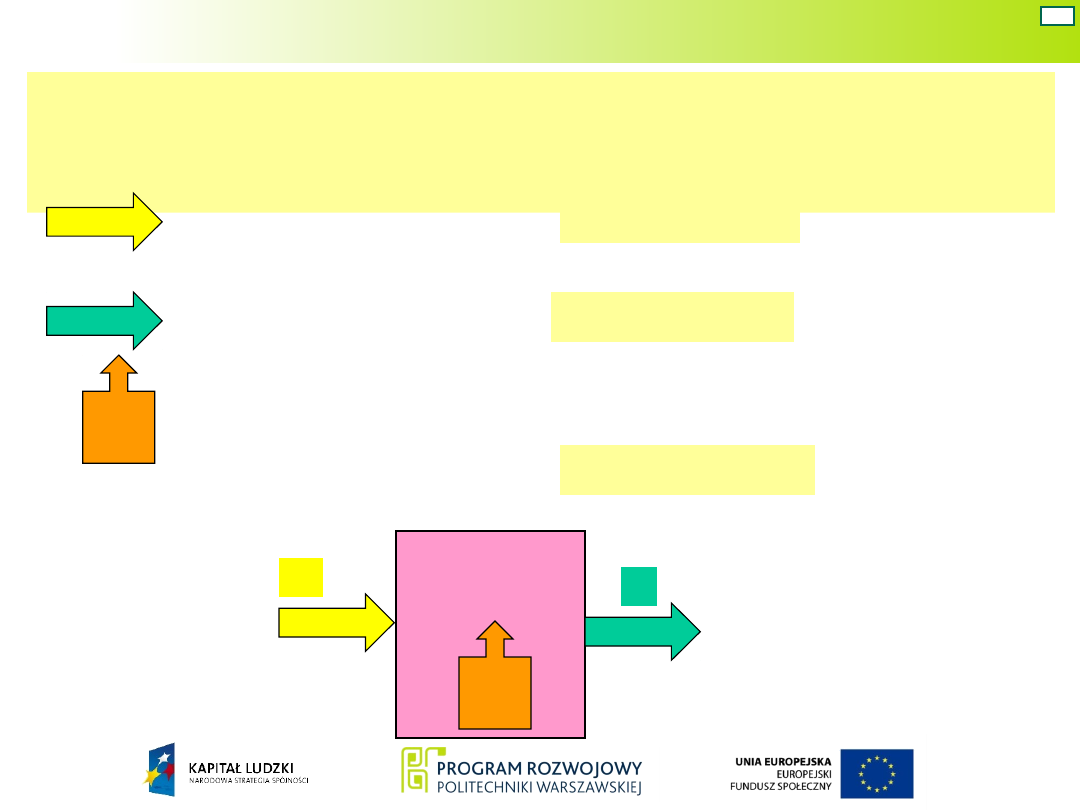
Układ generuje sygnał y
3
=1 po pojawieniu się stanu
wejść x
1
=x
2
=x
3
=1, do chwili pojawienia się stanu wejść
x
1
=x
2
=x
3
=0, po czym generuje na wyjściu sygnał y
3
= 0.
Można powiedzieć, że stan wejść x
1
=x
2
=x
3
= 1 wprawia
w układ w stan działania, stan wejść x
1
=x
2
=x
3
= 0
wprawia w układ w stan niedziałania – w stan
spoczynku. W każdym z tych dwóch stanów układ
reaguje inaczej na stan sygnałów wejściowych.
Układ sekwencyjny może znajdować się w jednym z
kilku stanów – tzw. stanów wewnętrznych. W każdym z
nich może inaczej reagować na stan sygnałów
wejściowych.
Układ sekwencyjny musi mieć możliwość
przechowywania (pamiętania) informacji o tym, do
jakiego stanu wewnętrznego został wprowadzony. Służą
do tego binarne sygnały oznaczane jako
Q
1
, Q
2
, Q
3
, ....Q
k
; ich wartości w danej chwili t tworzą
tzw. stan wewnętrzny Q
t
układu w chwili t.
Podstawy układów sekwencyjnych
5
Stan procesowo-zależnego układu sekwencyjnego w
danej chwili t określają wartości (stan) trzech grup
sygnałów:
sygnałów wejściowych
t
t
n
t
t
X
x
x
x
,.....
,
2
1
(stan wejść)
sygnałów wyjściowych
t
t
m
t
t
Y
y
y
y
,.....
,
2
1
(stan wyjść)
sygnałów reprezentujących stan wewnętrzny
t
t
k
t
t
Q
Q
Q
Q
,.....
,
2
1
t
X
t
Y
t
Q

Podstawy układów sekwencyjnych
6
Stan układu sekwencyjnego, w którym sygnały
wejściowe nie wymuszają zmiany stanu wewnętrznego,
tj. kiedy , nazywa się stanem ustalonym lub
stanem stabilnym.
Układ sekwencyjny, będąc w stanie wewnętrznym Q
t
,
pod wpływem aktualnego stanu wejść X
t
może:
- pozostawać w tym samym stanie wewnętrznym, wtedy
stan w chwili
następnej ,
- zmienić stan wewnętrzny, wtedy stan w chwili
następnej .
t
t
Q
Q
1
t
t
Q
Q
1
t
t
Q
Q
1
Stan układu sekwencyjnego, w którym sygnały
wejściowe wymuszają zmianę stanu wewnętrznego, tj.
kiedy , nazywa się stanem przejściowym lub
stanem niestabilnym.
t
t
Q
Q
1
Podstawy układów sekwencyjnych
7
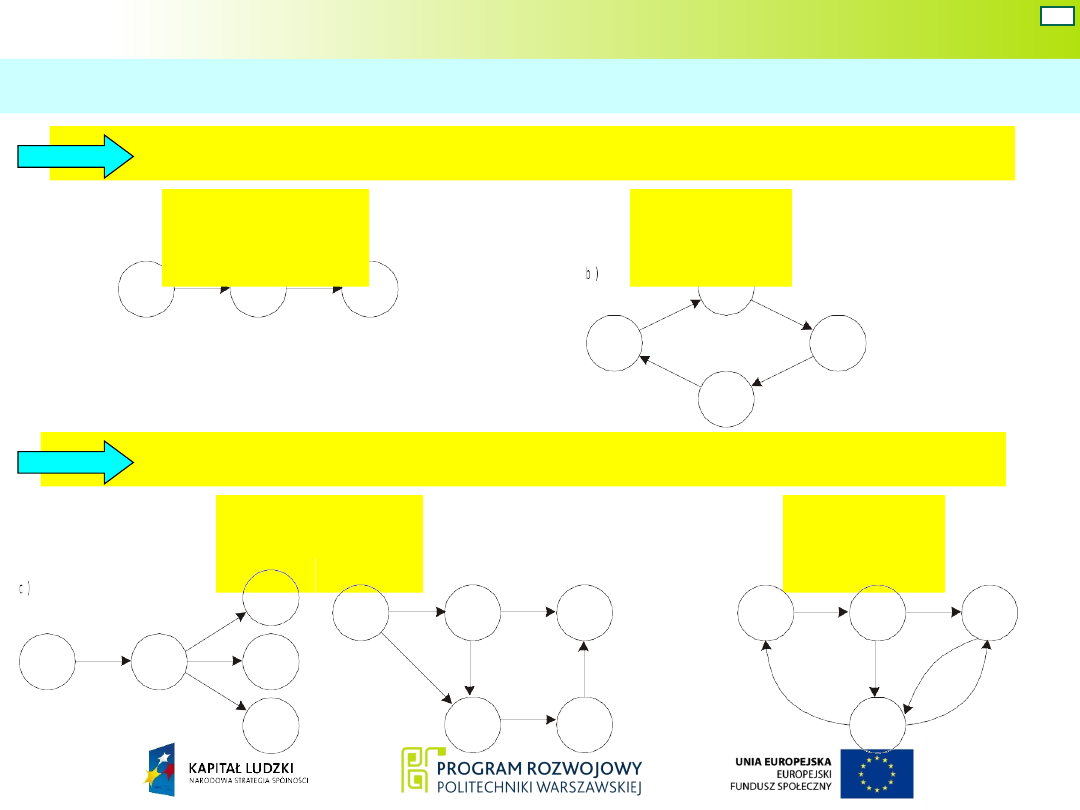
Ze względu na kolejność zmian stanów wewnętrznych rozróżnia się:
układy o programach liniowych (nierozgałęzionych)
acykliczn
e
cyklicz
ne
układy o programach nieliniowych (rozgałęzionych)
acykliczn
e
cyklicz
ne
Podstawy układów sekwencyjnych
8
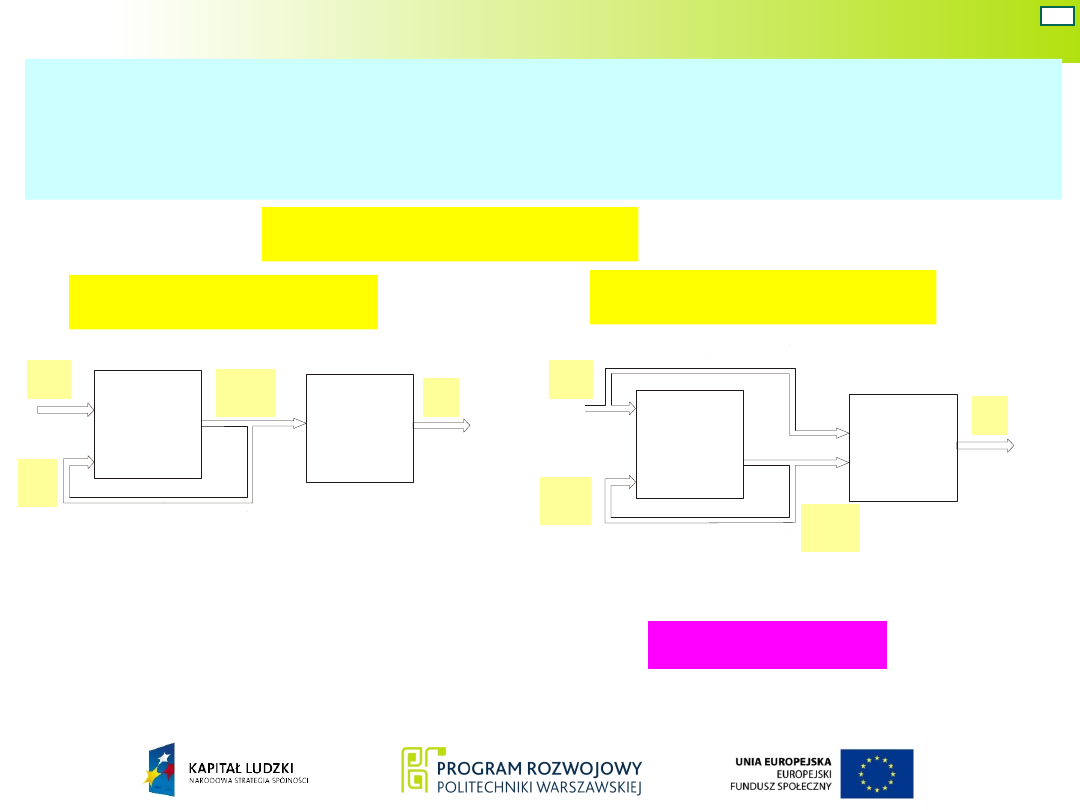
Ze względu na sposób generowania sygnałów
wyjściowych wyróżnia się dwa rodzaje układów
sekwencyjnych: układy Moore'a i Mealy'ego.
Schematy blokowe:
układu Moore’a
układu Mealy’ego
1
t
X
t
X
t
Q
t
Q
1
t
Q
1
t
Q
t
Y
t
Y
Wyróżniającymi częściami układów sekwencyjnych są:
• zespół realizujący tzw. funkcje przejść
• zespół realizujący tzw. funkcję wyjść.
)
,
(
1
t
t
t
Q
X
Q

Podstawy układów sekwencyjnych
9
W układach Moore'a aktualny stan wyjść zależy tylko
od aktualnego
stanu wewnętrznego
)
(
1
t
t
Q
Y
W układach Mealy’ego aktualny stan wyjść jest
funkcją nie tylko aktualnego stanu wewnętrznego
lecz także aktualnego stanu wejść
)
,
(
2
t
t
t
X
Q
Y
Funkcje λ
1
i λ
2
nazywają się funkcjami wyjść
odpowiednio układu Moore'a i Mealy’ego.

Podstawy układów sekwencyjnych
10
Ze względu na sposób przejmowania przez układ informacji o stanie
wejść, wśród układów sekwencyjnych rozróżnia się układy
asynchroniczne i układy synchroniczne.
W układach asynchronicznych informacje o stanie
wejść przejmowane są przez układ w sposób ciągły.
Oznacza to, ze zmiana stanu wewnętrznego następuje
bezpośrednio po pojawieniu się odpowiedniego stanu
wejść. Od pojawienia się stanu wejść wywołującego,
zgodnie z funkcją przejść, zmianę stanu
wewnętrznego, do chwili, w której osiągnięty zostanie
nowy stan wewnętrzny, układ znajduje się w stanie
przejściowym (niestabilnym).
t
t
Q
Q
1
W stanie niestabilnym

Podstawy układów sekwencyjnych
11
Zmiany stanu wewnętrznego są opóźnione względem
zmian stanu wejść o czas trwania stanów przejściowych
układu realizującego funkcję przejść. Opóźnienie to jest
odstępem czasu pomiędzy chwilą aktualną t a chwilą
następną t+1. Do chwili pojawienia się następnego
stanu
wejść
powodującego
zmianę
stanu
wewnętrznego, układ znajduje się w stanie stabilnym,
podczas którego
t
t
Q
Q
1
W
układach
synchronicznych
zmiany
stanu
wewnętrznego
mogą
dokonywać
się
tylko
w
określonych chwilach czasu, wyznaczonych przez tzw.
sygnał zegarowy (ciąg prostokątnych impulsów o
stałym okresie), w zależności od stanu sygnałów
wejściowych w tych chwilach. Można więc powiedzieć,
że informacje o stanie wejść przejmowane są przez
układ synchroniczny w sposób nieciągły
– w określonych chwilach czasu, zwanych chwilami
próbkowania.

Podstawy układów sekwencyjnych
12
Zarówno w przypadku układów Moore’a jak i
Mealy’ego, bloki realizujące funkcję wyjść, są układami
kombinacyjnymi.
Bloki realizujące funkcję przejść, w przypadku układów
asynchronicznych, mogą być budowane bezpośrednio na
podstawie funkcji przejść, jako układy kombinacyjne,
objęte sprzężeniem zwrotnym albo też jako zespół: układ
kombinacyjny - blok typowych elementów pamięci, tzw.
przerzutników; mówi się, że są to układy z
wydzielonym blokiem przerzutników. W drugim
przypadku, zadaniem układu kombinacyjnego jest
wytworzenie sygnałów wejściowych przerzutników
(wzbudzeń przerzutników). Układ ten realizuje tzw.
funkcję wzbudzeń
)
,
(
1
t
t
t
X
Q
q
gdzie q
t
to aktualny stan sygnałów wejściowych
przerzutników. Postać funkcji wzbudzeń
zależy od
funkcji przejść danego układu oraz od rodzaju
zastosowanych przerzutników.
Podstawy układów sekwencyjnych
13
Układy synchroniczne mogą być realizowane tylko z wydzielonym
blokiem przerzutników.
Funkcje przejść (lub funkcje wzbudzeń) i funkcje wyjść
stanowią pełny opis matematyczny danego układu
sekwencyjnego i są podstawą realizacji tego układu.
Matematyczny model układu sekwencyjnego nazywany
jest automatem skończonym.
Automaty, w których zakłada się, że
prawdopodobieństwo realizacji funkcji przejść i wyjść
zgodne z ich matematycznym opisem jest równe
jedności, nazywają się automatami
deterministycznymi, natomiast automaty, w których
prawdo podobieństwo to jest mniejsze od jedności –
automatami probabilistycznymi.
Automaty, których postać funkcji przejść i wyjść nie
zmie nia się w czasie, nazywają się automatami o
stałej strukturze; automaty, których postać funkcji
przejść i wyjść ulega zmia nom w czasie nazywają się
automatami o strukturze zmiennej.

Podstawy układów sekwencyjnych
14
Metody opisu działania układów
sekwencyjnych
Funkcje przejść i wyjść stanowią pełny opis
matematyczny działania danego układu
sekwencyjnego, na podstawie którego można
sporządzić schematy logiczne i wykonawcze układu.
Funkcje te są tworzone na podstawie pierwotnych
form opisu działania układu, spośród których
podstawowe znaczenie mają:
w przypadku układów Moore’a:
• tablica przejść i wyjść,
• graf,
w przypadku układów Mealy’ego:
• tablica przejść i tablica wyjść,
• graf.
Podstawy układów sekwencyjnych
15
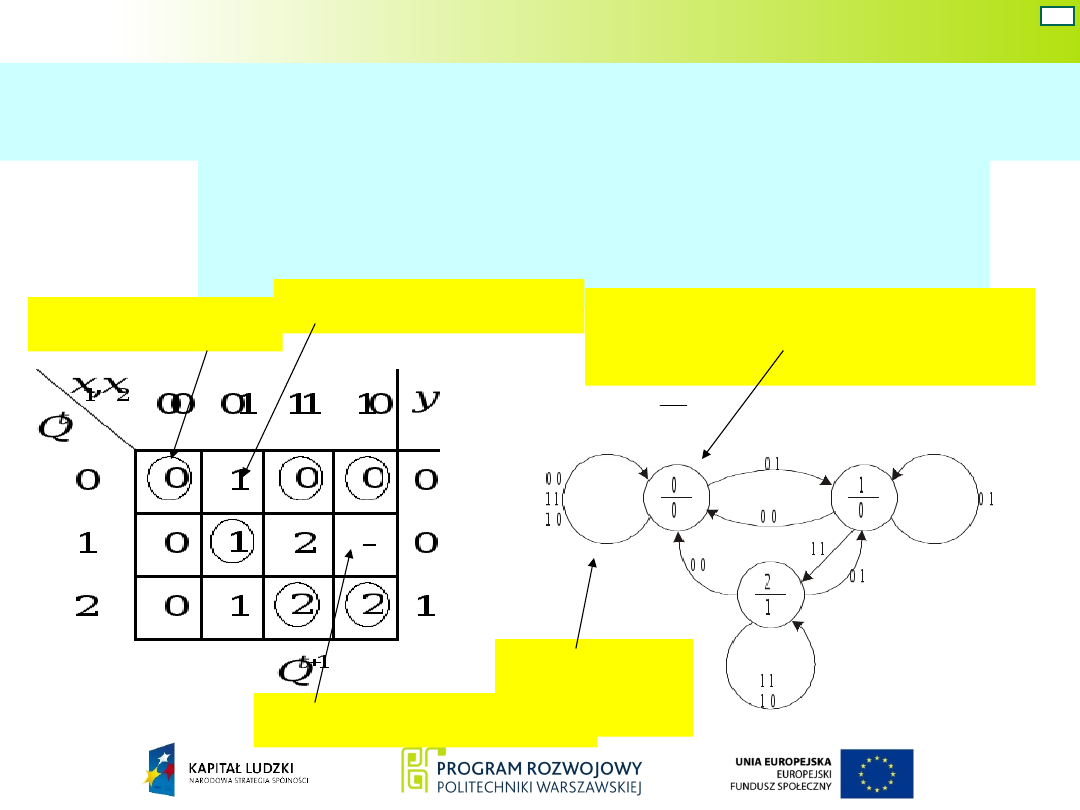
Przykład tablicy przejść i wyjść oraz grafu asynchronicznego układu
Moore’a:
• o dwóch sygnałach wejściowych x
1
i x
2
,
• jednym sygnale wyjściowym y,
• trzech stanach wewnętrznych,
nazwanych 0, 1 i 2.
2
1
,x
x
y
Q
biegun (wierzchołek)
grafu
ramię
grafu
stan stabilny stan niestabilny
stan nieokreślony

Podstawy układów sekwencyjnych
16
Tablica przejść i wyjść układu Moore’e podaje:
• stany wewnętrzne układu (kolumna z lewej strony
tablicy),
• stany sygnałów wyjściowych odpowiadające
poszczególnym stanom
wewnętrznym (kolumna z prawej strony tablicy),
• stany sygnałów wejściowych (górny wiersz tablicy),
• stany następne, do których układ przechodzi ze
stanów aktualnych
pod wpływem poszczególnych stanów wejść (wnętrze
tablicy).
Odpowiednikami aktualnych stanów wewnętrznych w
tablicy przejść i wyjść są wierzchołki (bieguny) grafu.
Wewnątrz biegunów podany jest numer stanu (licznik) i
odpowiadający mu stan wyjść (mianownik). Ramiona
(gałęzie) grafu wskazują zmiany stanów wewnętrznych
dokonujące się pod wpływem wymienionych nad nimi
stanów wejść. Stanom stabilnym układu odpowiadają
ramiona tworzące pętle, niestabilnym - ramiona
pomiędzy biegunami.
Podstawy układów sekwencyjnych
17
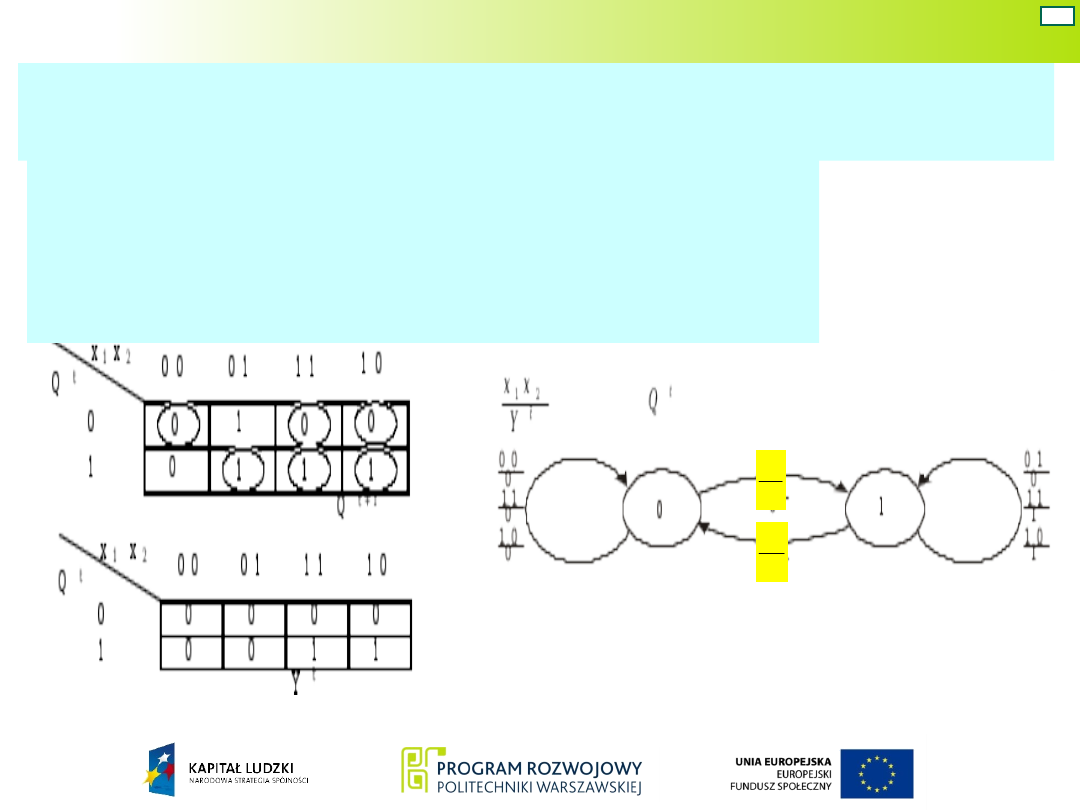
Przykład tablicy przejść i tablicy wyjść oraz grafu
asynchronicznego układu Mealy’ego:
• o dwóch sygnałach wejściowych x
1
i x
2
,
• jednym sygnale wyjściowym Y,
• dwóch stanach wewnętrznych,
nazwanych 0 i 1.
0
01
0
00
Podstawy układów sekwencyjnych
18
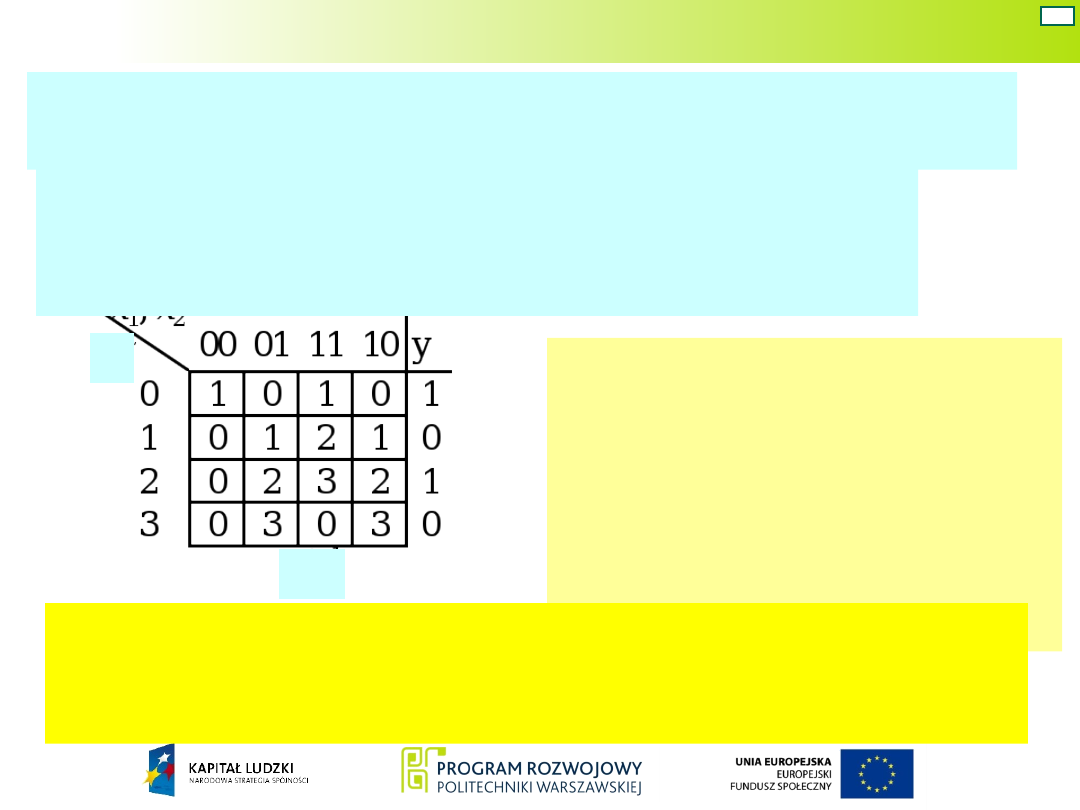
Przykład tablicy przejść i wyjść synchronicznego
układu Moore’a:
• o dwóch sygnałach wejściowych x
1
i x
2
,
• jednym sygnale wyjściowym y,
• czterech stanach wewnętrznych, nazwanych
0, 1, 2 i 3.
W tablicy przejść układu
synchronicznego nie
wyróżnia się stanów
stabilnych i niestabilnych
– pojęcia te dotyczą tylko
układów
asynchronicznych.
Wynikające z tablicy przejść zmiany stanów
wewnętrznych mogą zachodzić tylko w chwilach
próbkowania, wyznaczonych przez sygnał zegarowy.
n
Q
1
n
Q
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
PA2 4 podstawy ukł sekw
biologiczne podstawy, ukl pokarmowy, B)
biologiczne podstawy ukl nerwowy
biologiczne podstawy, ukl wydalniczy, B)
6D Stosowanie PLC w ukł sekw
Badanie fizykalne ukł. kostno-stawowego, Podstawy(1)
pom mocy ukl trojfaz, Informatyka, Podstawy miernictwa, Laboratorium
anatomia notatki ukł krazenia, podstawy anatomii
Badanie fizykalne ukł oddechowego, Podstawy(1)
PA2 6 ukł o pr rozg
Badanie ukł. wyświetlania informacji na podstawie prostego woltomierza, Zespół Szkół Elektrycznych n
Badanie fizykalne ukł. kostno-stawowego, Podstawy(1)
Podstawy Automatyki Laboratorium Ćwiczenie 4 Opracowanie Ukł log
Podstawowe zasady udzielania pomocy przedlekarskiej rany i krwotoki
Farmakologia pokazy, Podstawy Farmakologii Ogólnej (W1)
więcej podobnych podstron