FIZYKA
FIZYKA
Dr inż. Marek PROFASKA
tel.237-23-17 kom.607-746-544
Kinematyka ciała
Kinematyka ciała
sztywnego
sztywnego
KINEMATYKA ciała
KINEMATYKA ciała
sztywnego
sztywnego
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
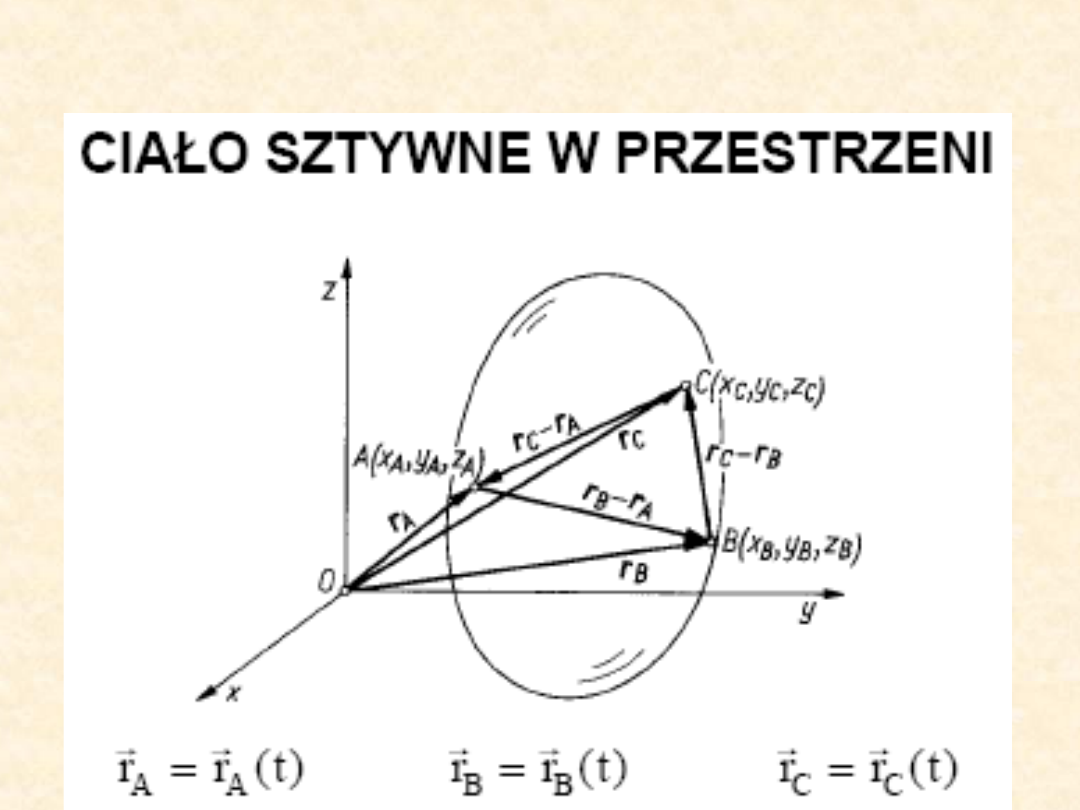
Przypadki ruchu ciała sztywnego:
Ruch ciała sztywnego określany
jest przez ruch trzech punktów
tego ciała (jest to najmniejsza
liczba punktów związanych
ze sobą w sposób sztywny,
spełniających warunki
sztywności).
Tory tych punktów to tzw. kierownice ruchu.
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
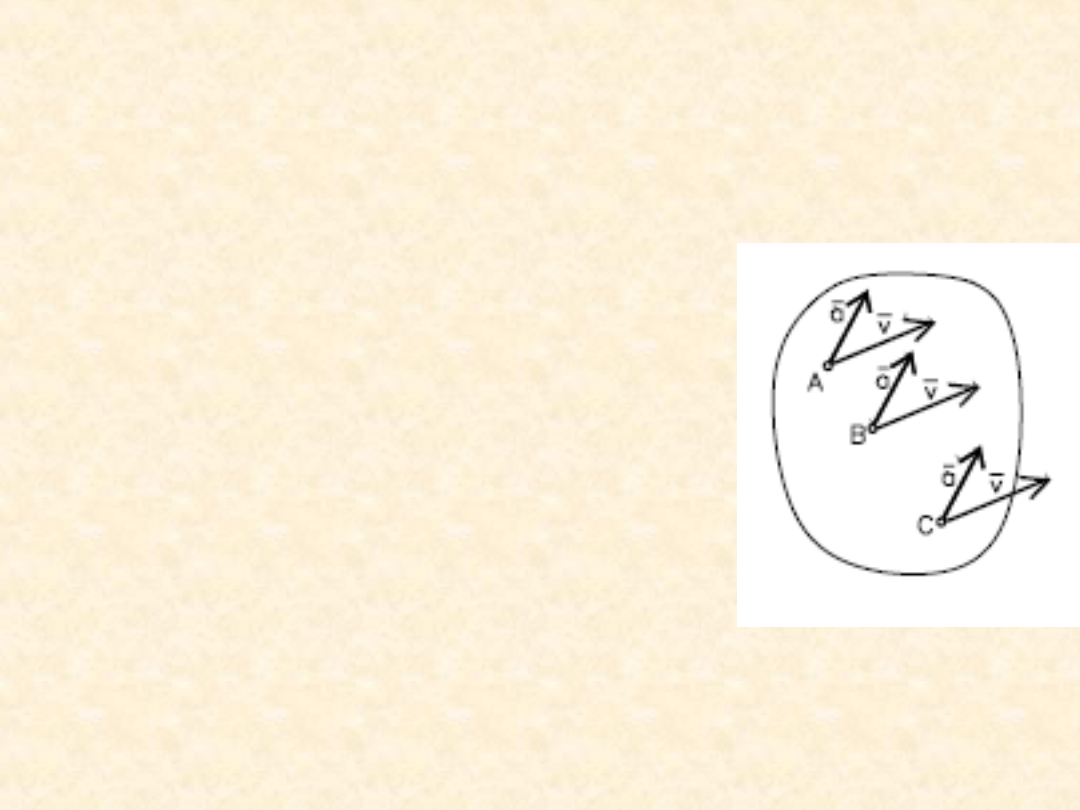
W zależności od kierownic rozróżniamy:
1)
przesunięcie
– kierownice proste
równoległe (ruch ten określany jest przez
ruch
jednego punktu ciała sztywnego).
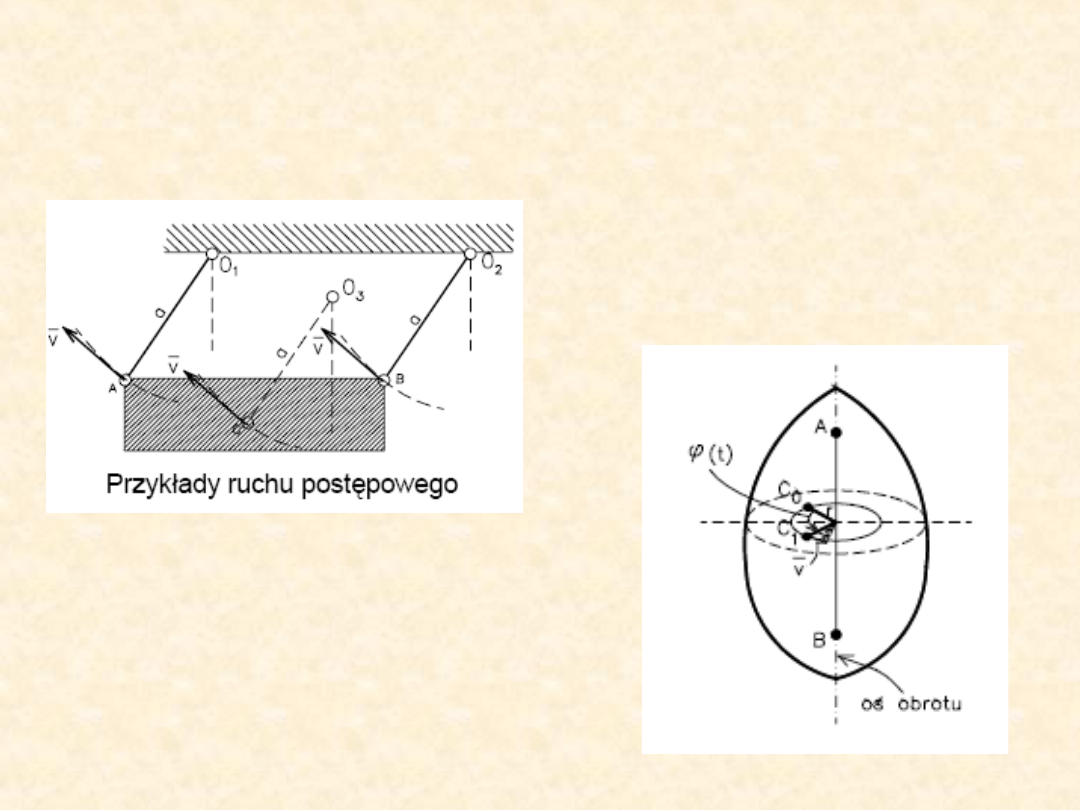
2)
ruch postępowy
– kierownice krzywe do
siebie równoległe ( ruch określony jest
przez ruch jednego punktu ciała) – np. ruch
tłoka, klatka dźwigu.
3)
ruch obrotowy
– kierownice dwóch
punktów ciała redukują się do punktów i
wyznaczają oś obrotu.
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
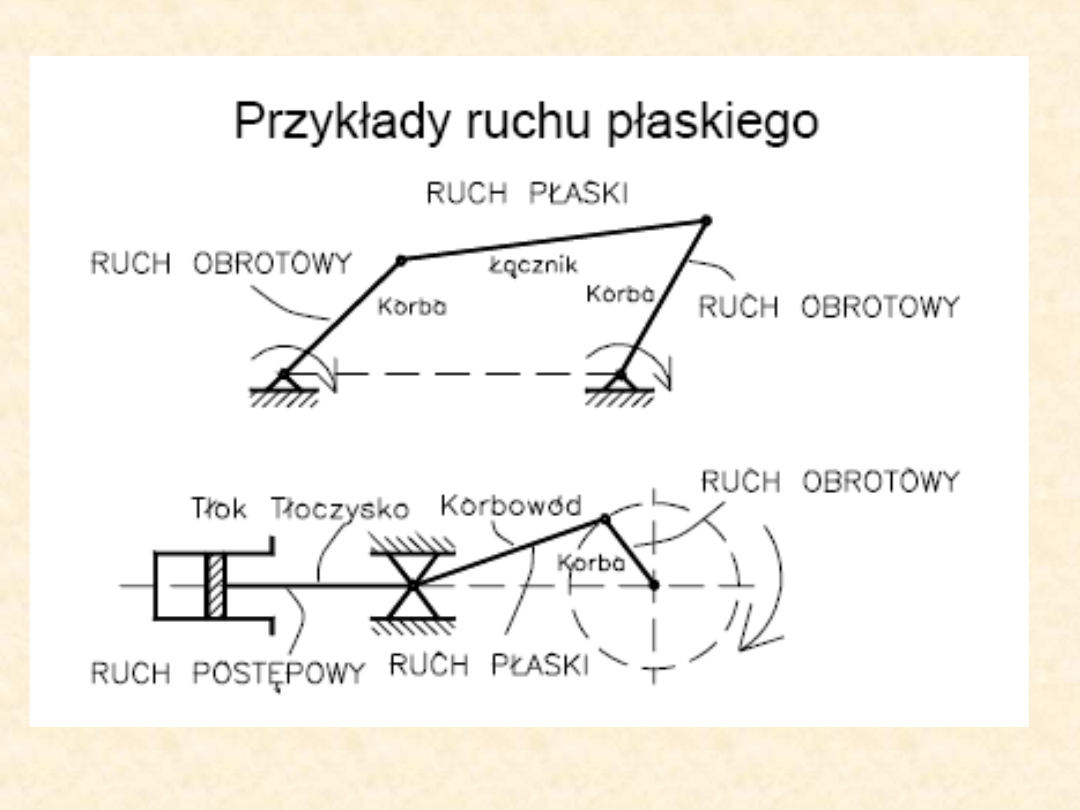
4)
ruch płaski
– kierownice leżą w
płaszczyznach do siebie równoległych.
Chwilowy ruch płaski można traktować
jako chwilowy obrót dookoła tzw. Osi
chwilowego obrotu. Suma ruchów
chwilowych oddaje nam zatem ruch płaski.
5)
ruch kulisty
– kierownice jednego z
punktów redukują się do punktu.
6)
ruch ogólny
– kierownice dowolnie
zorientowane w przestrzeni.
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
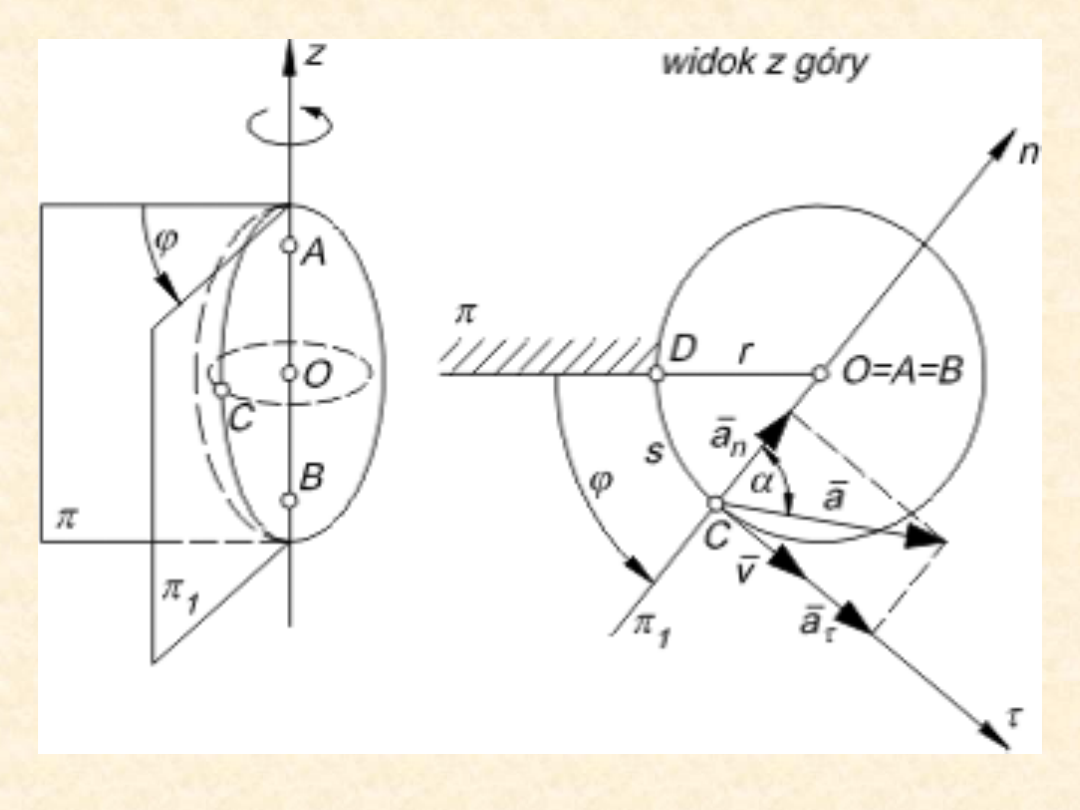
Ruch obrotowy
Nieruchome punkty A i B określają
położenie przechodzącej przez nie
prostej zwanej osią obrotu. Tor
dowolnego punktu nie leżącego na osi
obrotu jest kołem. Równanie ruchu
obrotowego ciała sztywnego
zapisujemy w postaci zależności kąta
obrotu od czasu:
φ = φ (t).
Ruch
obrotowy
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Średnią prędkość kątową
określamy jako iloraz różnicowy
przyrostu współrzędnej kątowej oraz
przyrostu czasu:
t
sr
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Obliczając granicę ilorazu różnicowego
przy t dążącym do zera,
otrzymujemy
prędkość kątową
:
dt
d
t
t
lim
0
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Jeśli prędkość kątowa ω = const ,
wówczas ruch obrotowy jest ruchem
jednostajnym.
C
t
dt
t
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
W zależności od warunków
początkowych możliwe są 4 warianty
równania współrzędnej kątowej
(podobnie jak w ruchu punktu).
Np. dla t = 0 i φ = φ
0
,
otrzymamy C = φ
0
, φ = φ
0
+ ω t
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
W zagadnieniach technicznych opisując
ruch obrotowy, często zamiast
prędkości kątowej używamy liczby
obrotów na minutę oznaczanej przez n.
gdzie n – liczba obrotów na minutę.
ω - prędkość kątowa [s
-1
] .
30
60
2
n
n
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Zmienność w czasie prędkości
kątowej nazywamy
przyspieszeniem kątowym.
Przyspieszenie kątowe średnie
:
t
sr
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Przyspieszenie kątowe w danej chwili:
dt
d
t
t
lim
0
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Jeżeli
wektory ω i ε mają taki sam
zwrot
mamy do czynienia z ruchem
przyspieszonym, w przypadku zwrotów
przeciwnych z ruchem opóźnionym.
Jeżeli
przyspieszenie kątowe ε jest
stałe
mamy do czynienia z ruchem
jednostajnie zmiennym.
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
W zależności od warunków
początkowych możliwych jest 16
wariantów równania współrzędnej
kątowej (podobnie jak
w ruchu punktu).
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Dla warunków początkowych t = 0 ,
φ=φ
0
,
ω = ω
0
otrzymujemy:
C
t
dt
t
t
0
2
2
0
0
t
t
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Zależność pomiędzy prędkością
kątowa i liniową.
r
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Zależność pomiędzy
przyspieszeniem kątowym i
stycznym:
r
a
r
r
r
a
n
2
2
2
2
2
n
a
a
a
KINEMATYKA
KINEMATYKA
ciała sztywnego
ciała sztywnego
Ruch obrotowy zmienny występuje
gdy:
φ =φ(t) , ω = ω(t), ε = ε(t).
KINEMATYKA
KINEMATYKA
Dziękuję za uwagę
!
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
Wyszukiwarka
Podobne podstrony:
Wyk ad Fizyka 6
Wyk ad Fizyka 1
Wyk ad Fizyka 5
Wyk ad Fizyka 4
Wyk ad Fizyka 6
Wyk ad 5 6(1)
Wyk ad II
Tkanki wyk ad 1
Ekonomika Transportu wyk+ad 1
Wyk ad 04
Na wyk ad id 312279 Nieznany
!BSI, wyk ad 4
PGP-PZP - wyk ad - 30-01-2010, Zamówienia publiczne UEK
więcej podobnych podstron