© Dr inż. JANUSZ LICHOTA
PODSTAWY AUTOMATYKI
Egzamin 25 I 2011
Wydział Mechaniczno-
Energetyczny
Wrocław 2011
KOLEJNY TERMIN EGZAMINU
• ?
PYTANI
A
1. Narysuj i opisz układ automatycznej regulacji
2. Opisz metodę doboru nastaw regulatorów podaną
przez Zieglera i Nicholsa (częstotliwościową)
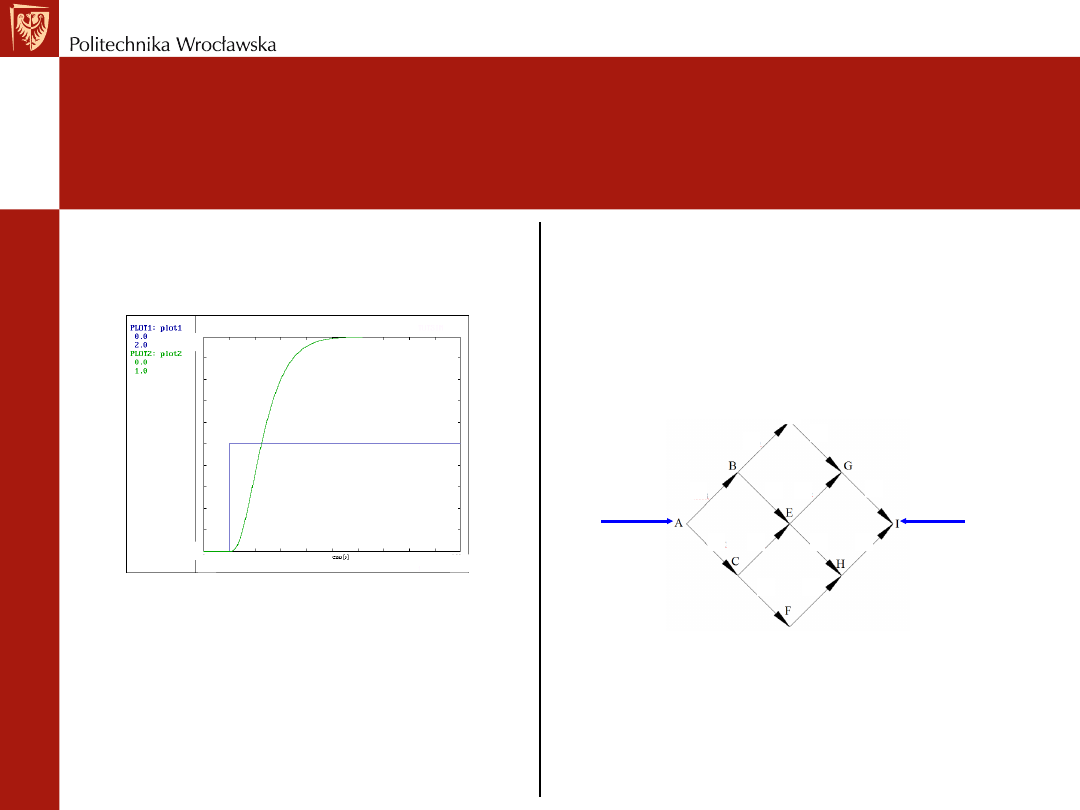
3. Wyznacz model Kuepfmuellera dla obiektu z
rysunku
4. Opisz powiązania równań przestrzeni stanu i
transmitancji G(s)
5. Opisz jak dobrać zawór regulacyjny ?
1. Podaj definicję transformaty Laplace’a i transmitancji
operatorowej i widmowej
2. Opisz sposób sporządzania charakterystyk
częstotliwościowych i wymień typy wykresów
częstotliwościowych
3. Podaj równanie czasowe, transmitancję regulatora PID,
narysuj odpowiedź regulatora na skok jednostkowy
oraz sygnał narastający liniowo w czasie u=t
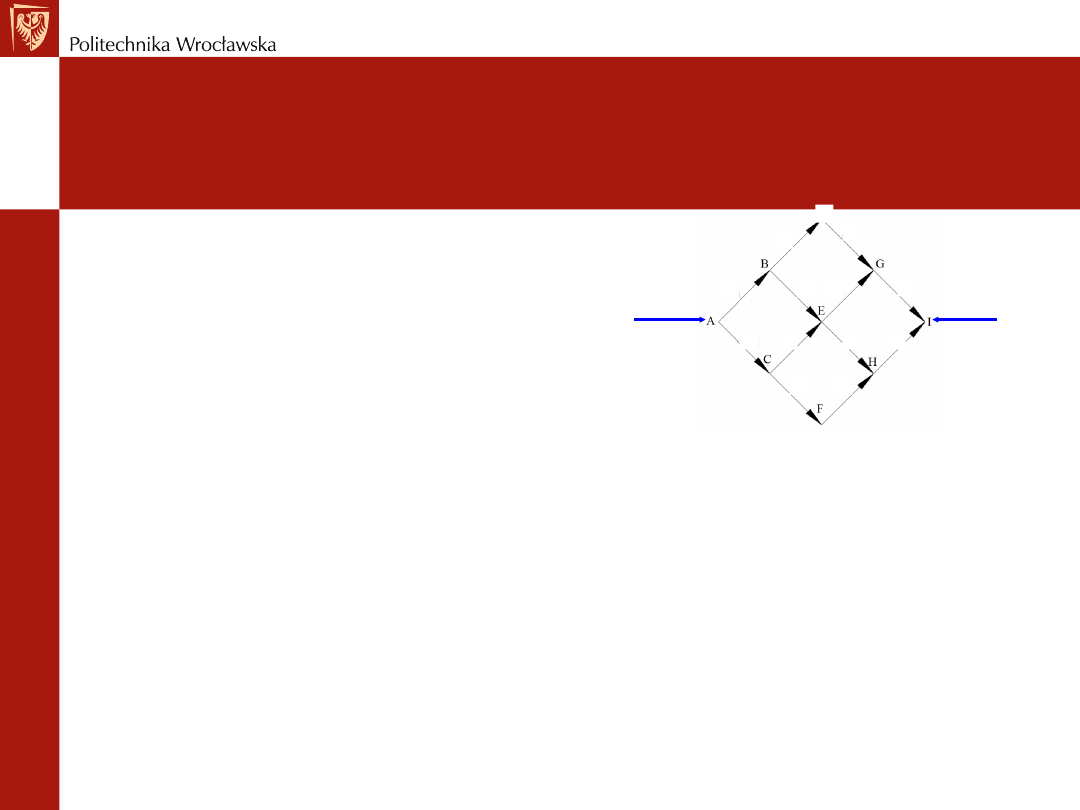
4. Znajdź ścieżkę optymalną (minimalny koszt) posługując
się dyskretnym równaniem Bellmana
5. Narysuj układ z samopodtrzymaniem przekaźników i
napisz jego równanie schematowe
1
1
3
Stan
początkowy
Stan
końcowy
D
1
3
2
1
1
3
1
1
1
0
1
0
100
Grupa A
Grupa B
Dziękuję za uwagę i
zainteresowanie
Utwórz listę wskaźników dla zadania
optymalizacyjnego i napisz procedurę
(rekurencyjną lub nie) minimalizacji
długości ścieżki metodą Bellmana.
Podpowiedź : Min(min(min(....)))
2. Jaki typ regulatora realizuje procedura
HIS ?
3. Sygnał wyjściowy z inercji I rzędu (filtr)
można zapisac w pascalu jako
Out_ := Tcyklu/T_*SygOld + OutOld*(1-
Tcyklu/T_);
Tcyklu – czas pomiędzy dwoma kolejnymi
wejściami do procedury
T- stała czasowa inercji
SygOld – sygnał wejściowy do inercji
OutOld – poprzednia wartość sygnału
Napisz program, który będzie w czasie
rzeczywistym filtrował zadane tablicą
sygnały. Podpowiedź: do obliczeń
Tcyklu można wykorzystać funkcję
GetTime i zapamiętywać kolejne
wejścia do procedury Filtr
1
1
3
Stan
początkowy
Stan
końcowy
D
1
3
2
1
1
3
1
1
1
procedure HIS(I : Integer);
begin
With Pro[I]^.HIS^, Pro[I]^ do
begin
if (A1 - A2 > Histereza/2) then
Out_ := 1;
if (A1 - A2 < -Histereza/2) then
Out_ := 0;
UzupelnijNastepneModuly(acHIS, Next,
Out_, 1);
end;
end;
procedure FIL(I : Integer);{ filtr I rzedu }
var CzasBiez, Tcyklu, T_ : Real;
h, m, s, hund : Word;
begin
T_ := Pro[I]^.FIL^.T;
With Pro[I]^.FIL^, Pro[I]^ do
begin
if T_ <> 0 then
begin
GetTime(h,m,s,hund);
CzasBiez := h*3600;
CzasBiez := CzasBiez + m*60 + s + hund/100;
Tcyklu := CzasBiez - CzasPoprz;
Out_ := Tcyklu/T_*SygOld + OutOld*(1-Tcyklu/T_);
SygOld := A;
CzasPoprz := CzasBiez;
OutOld := Out_;
end;
UzupelnijNastepneModuly(acFIL, Next, Out_, 1);
end;
end;
Document Outline
Wyszukiwarka
Podobne podstrony:
Podstawy Automatyki Egzamin pyt Nieznany
Podstawy automatyki egzamin
Podstawy automatyki egzamin zadania
pytanka na ustny, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, egzamin
Podstawy Automatyki Egzamin pyt Nieznany
pa 1 a podstawy automatyki egzamin 2008 01 29
polski egzamin CKE 2011 r podstawowy
PA egzamin, AGH, Semestr IV, Podstawy automatyki[Ornacki,Pakuła,Łukomski,Snamina], EGZAMIN AUTOMATYK
zadania na egzamin, PWr W9 Energetyka stopień inż, III Semestr, Podstawy automatyki
Sciągi na egzamin, IŚ Tokarzewski 27.06.2016, VI semestr COWiG, Podstawy Automatyki Procesów, WYKŁAD
Nowy plan 2011 12 lato n, Semestr IV, Podstawy Automatyki
2011 - Egzamin ADWOKACKI, egzamin-adowkacki-z-2011-r.---klucz-odpowiedzi, Wykaz prawidłowych odpowie
Opracowanie na egzamin z Podstaw Automatyki
Pisemny, AGH, Semestr IV, Podstawy automatyki[Ornacki,Pakuła,Łukomski,Snamina], EGZAMIN AUTOMATYKA,
więcej podobnych podstron