
Dynamika bryły
Wykład 4
Dynamika układu punktów materialnych. Środek
masy
W dotychczasowych naszych rozważaniach dotyczących
dynamiki trak-towaliśmy ciała poruszające się jako
punkty materialne nie uwzglę-dniając ich wymiarów
geometrycznych, ani objętości. Obecnie przej-dziemy
do dynamiki układu punktów materialnych
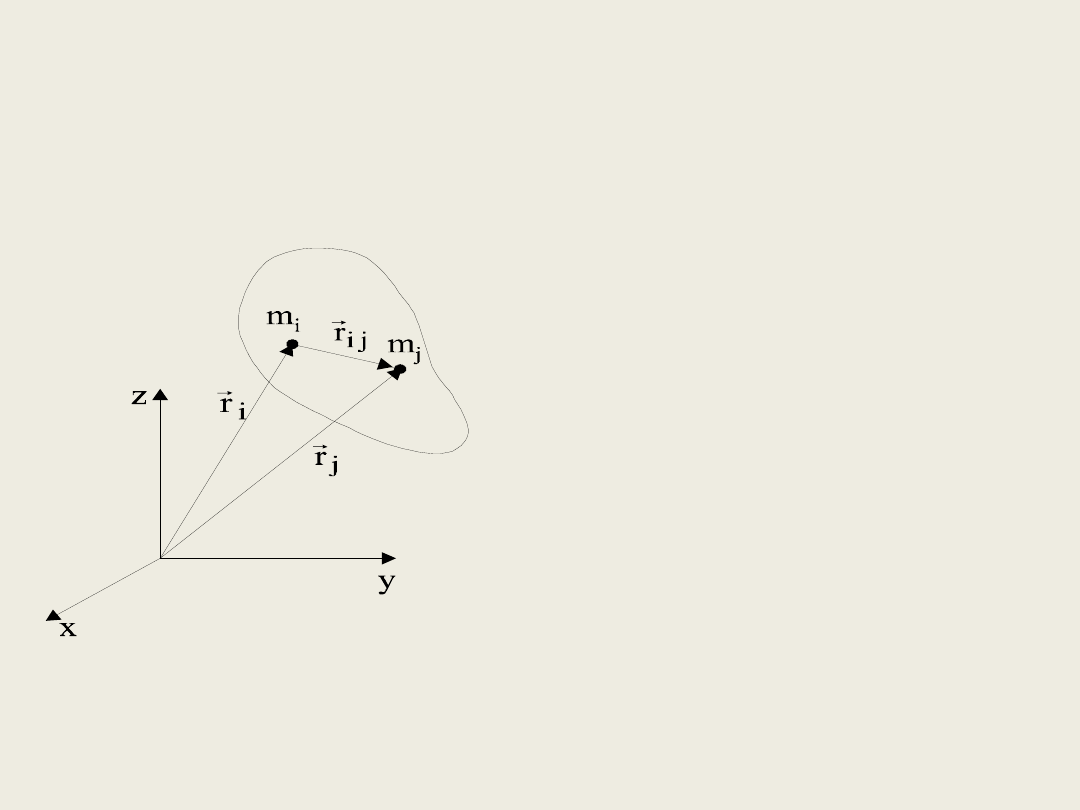
Załóżmy, że układ jest złożony z N punktów
materialnych
o
masach
m
1
,
m
2
,...
m
i
,...
,m
N
umieszczonych odpowiednio w punktach P
1
, P
2
... P
i
,... ,P
N
określonych jednoznacznie przez wektory wodzące .
Oczywiście każdemu wektorowi wodzącemu są
przypisane współrzędne (x
i
, y
i
, z
i
).
Środkiem masy tego układu nazywamy punkt S,
którego współrzędne wyrażają się wzorami:
i
i
i
s
i
i
i
s
i
i
i
s
m
z
m
z
,
m
y
m
y
,
m
x
m
x
Wzory ww można zapisać
wektorowo za pomocą jednego
wzoru
i
i
i
s
m
r
m
r
Promień wodzący środka masy
Gdy liczba części N zmierza do nieskończoności,
powyższe wyrażenie dąży do granicy
Z matematyki wiadomo, że granice sum w powyższym
wzorze wyrażają się odpowiednimi całkami
oznaczonymi.
Zatem
(3.29)
przy czym
oznacza całkowitą masę ciała.
i
i
i
n
s
m
r
m
lim
r
dm
dm
r
r
s
m
dm
Dla brył o regularnym kształcie środek masy
pokrywa się ze śro-dkiem symetrii. Na przykład
środek masy jednorodnej kuli leży w jej środku
geometrycznym, środek masy jednorodnego
walca znajduje się na osi symetrii w połowie
jego wysokości itp.
Jakie mogą być korzyści wprowadzenia pojęcia „środka
masy”
……..
F
...
F
F
F
a
m
3
2
1
s
Środek masy ciała ma tę właściwość, że iloczyn
całkowitej masy m i przyspieszenie środka masy
równa się sumie wszystkich sił działających
na poszczególne punkty układu
.
Siły te możemy podzielić na zewnętrzne (tzn.
działające między punktami układu i punktami
znajdującymi się zewnątrz rozważa-nego układu) i
wewnętrzne (tzn. działające między punktami dane-
go układu):
s
a
w
z
F
F
F
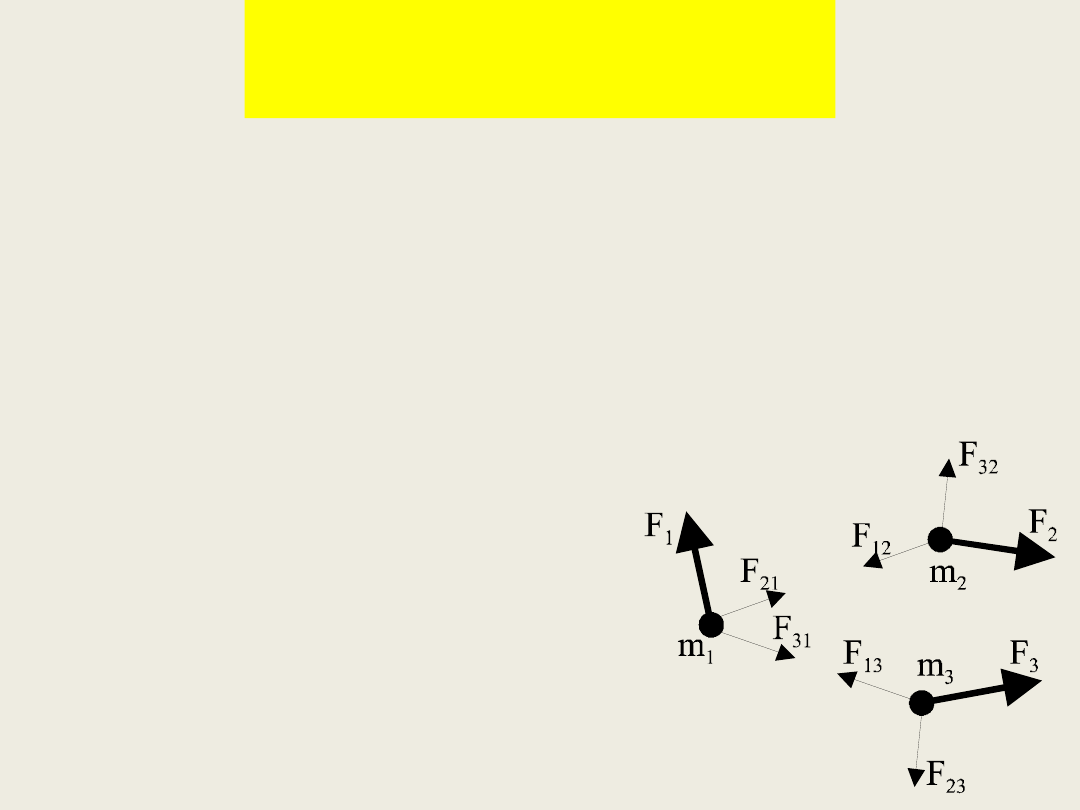
Układ trzech punktów
materialnych, na które
działają siły wewnętrzne
oraz siły zewnętrzne
ij
F
i
F
Z trzeciej zasady dynamiki wynika, że siły wewnętrzne
występują parami, których składniki są równe co do
wartości, lecz przeciwne co do kierun-ku. Stąd wniosek, że
wypadkowa wszystkich sił wewnętrznych równa się
zeru i wspomnianą właściwość środka masy można
wyrazić prostszą zależnością
(3.36)
Innymi słowy, środek masy ciała porusza się
tak, jakby w nim była skupiona całkowita masa
poddana działaniu wypadkowej wszy-stkich sił
zewnętrznych.
Stwierdzenie powyższe jest słuszne zarówno w
odniesieniu do układu sztywnego o niezmiennych wzajemnych
odległościach poszczególnych cząstek, jak również dla układu,
w którego skład wchodzą cząstki wykonujące dowolne ruchy
pod wpływem sił wewnętrznych.
Równanie (3.36) nosi nazwę równania ruchu ciała.
z
s
F
a
m
Zasada zachowania pędu
w
3
2
1
s
p
...
p
p
p
p
Pęd środka masy układu (czyli iloczyn
całkowitej masy układu i prędkości środka
masy) równa się pędowi wypadkowemu (czyli
sumie geometrycznej pędów poszczególnych
jego punktów materialnych).
.
dt
p
d
dt
p
d
F
w
s
z
Wypadkowa wszystkich sił zewnętrznych
działają-cych
na
układ
punktów
materialnych
równa
się
pochodnej
względem czasu pędu środka masy lub
pochodnej
względem
czasu
wypadkowego pędu układu.

Gdy wypadkowa wszystkich sił zewnętrznych
działających na układ równa się zeru, to wektor
wypadkowego pędu całego układu pozostaje stały.
Zmiana pędu układu może być wywołana
jedynie działaniem takich sił zewnętrznych, które
się nawzajem nie równoważą. Żadne siły
wewnętrzne nie są w stanie zmienić wypadkowego
pędu układu
.
Zasadę zachowania pędu zilustrujemy kilkoma
przykładami
.
> Wyskakując z łódki stojącej przy brzegu jeziora
uzyskujemy
pęd
skierowany
w
stronę
lądu.
Równocześnie łódka – zgodnie z zasadą zachowania
pędu – oddala się nieco od brzegu uzyskując pęd
równy co do wartości, lecz przeciwnie skierowany.
Wypadkowy pęd układu łódka – człowiek pozostaje
nadal równy zeru.
> Na zasadzie zachowania pędu opiera się działanie
śruby okręto-wej i śmigła samolotu. Śruba odrzuca
wodę do tyłu, statek uzyskuje pęd skierowany ku
przodowi. Podobnie śmigło odrzuca do tyłu masy
powietrza, a samolot przesuwa się naprzód.
> Znane są ogólnie zjawiska „odrzutu” przy użyciu
broni palnej: du-beltówka czy karabin „uderzają”
strzelca, bo lufa cofa się (w stosunku do pocisku) przy
wystrzale. Zjawisko odrzutu jest wykorzystywane na
szeroką skalę w samolotach odrzutowych i pociskach
rakietowych. Zasada ich ruchu polega na tym, że w
specjalnej komorze wewnętrznej odbywa się spalanie
mieszanki wybuchowej. Gazy z dużą prędkością, a więc
i z dużym pędem, uchodzą przez otwór w tylnej części
samolotu lub rakiety, które równocześnie uzyskują pęd
równy co do wartości, lecz skierowany ku przodowi.
Bryła sztywna
Bryłą sztywną będziemy nazywali takie ciało, w którym
wszystkie punkty mają względem siebie stałe
odległości, które nie zmieniają się pod wpływem sił
zewnętrznych działających na to ciało.
Ciało sztywne nie podlega
żadnym od-kształceniom pod
wpływem działają-cych sił, tzn.
w bryle sztywnej odległo-ści
dwóch dowolnych punktów
pozo-stają
zawsze
stałe,
pomimo działania na to ciało
różnych sił.
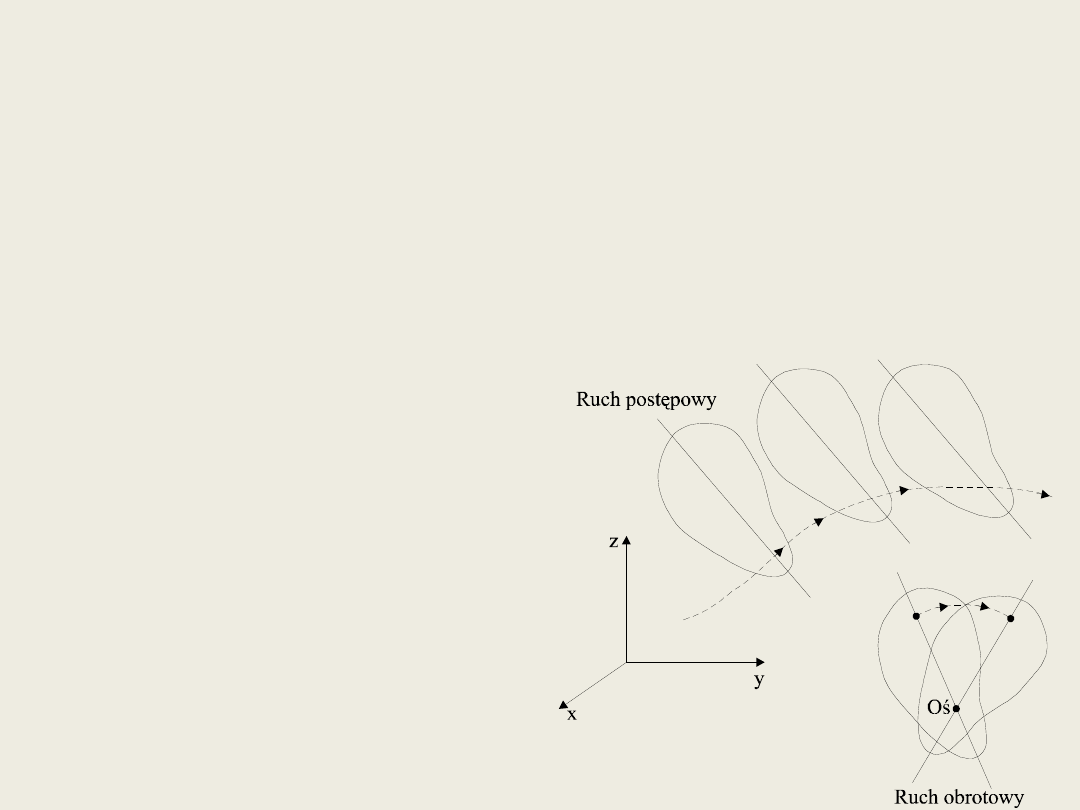
Rodzaje ruchów bryły sztywnej
Odróżniamy dwa rodzaje ruchu bryły sztywnej: ruch
postępowy i ruch obrotowy.
Ruchem postępowym
ciała sztywnego nazywamy taki
ruch, w którym dowolna prosta przeprowadzona przez to
ciało przesuwa się równolegle do samej siebie (wektory
prędkości wszystkich punktów ciała są w danej chwili
jednakowe).
Ciało porusza się
ruchem
obroto-wym
, jeżeli
wszystkie punkty ciała
poruszają się po okręgach,
których środki leżą na
jednej prostej. Prostą tą
nazywamy chwilową osią
obrotu. Oś obrotu może
mieć stałe położenie;
mówimy wtedy o stałej osi
obrotu.
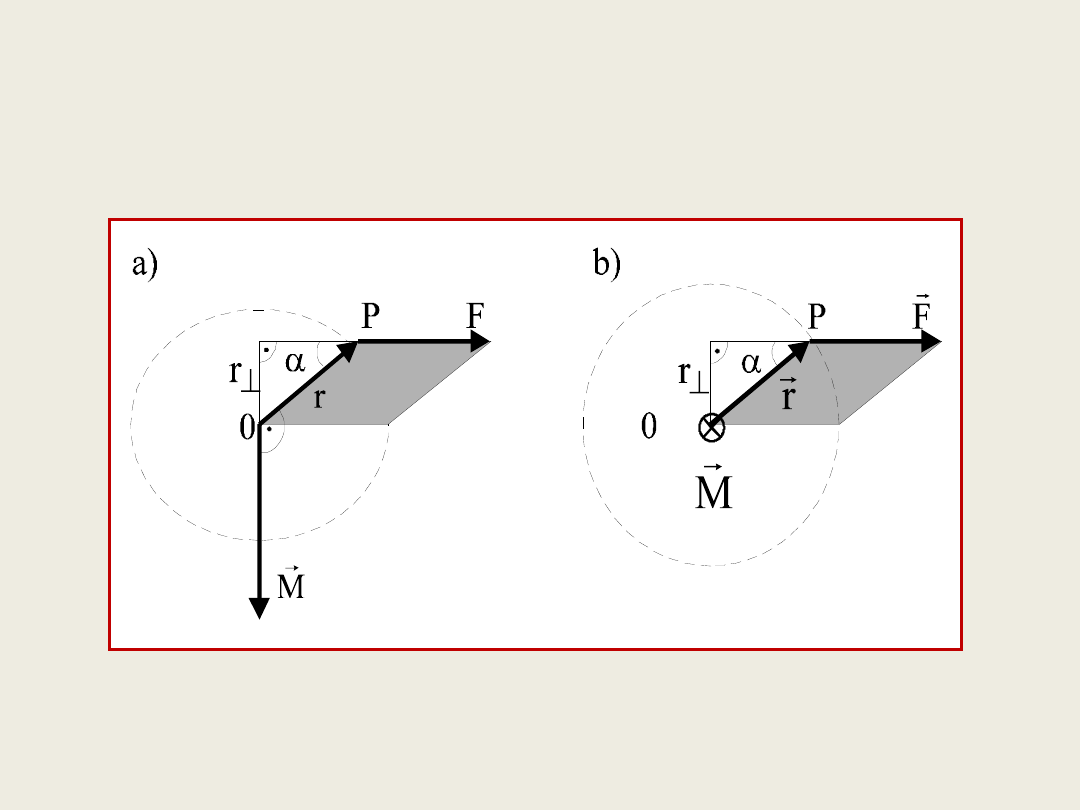
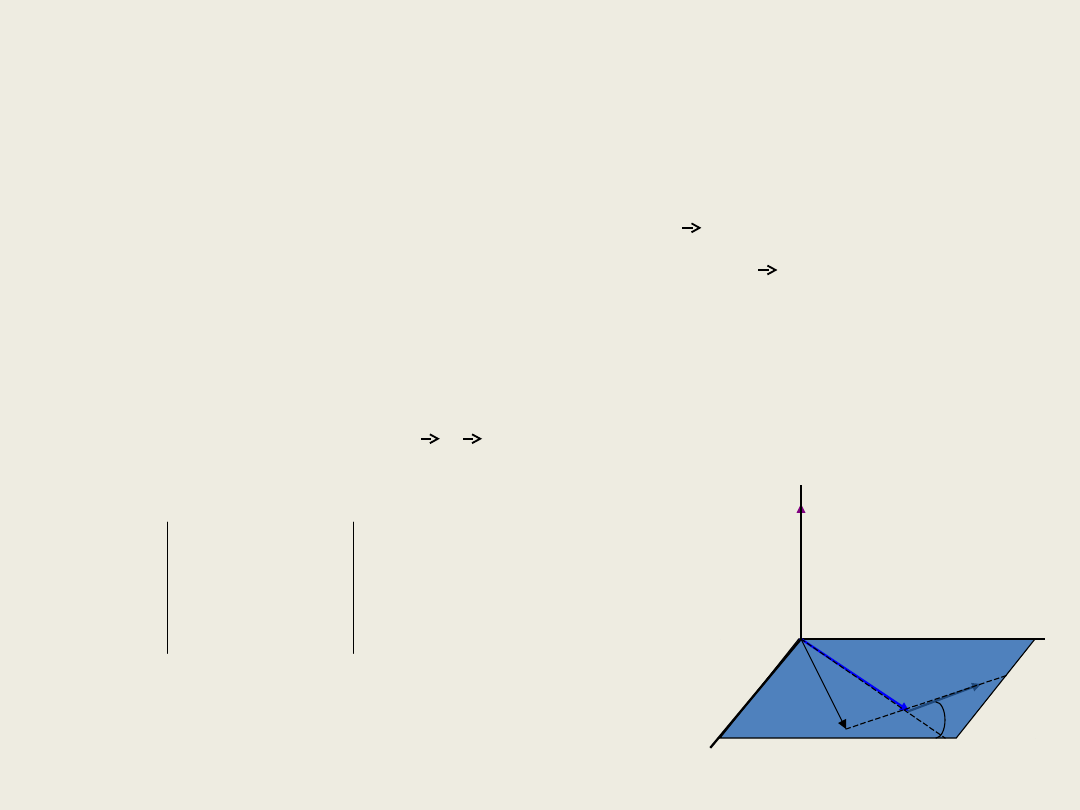
Moment siły
Aby spowodować ruch obrotowy bryły sztywnej
niezbędna jest siła, podobnie jak w ruchu postępowym.
> Z doświadczenia wiemy jednak, że nie
każda siła może wywołać ruch obrotowy.
Aby wprawić na przykład w ruch koło, ustawionego
do góry ko-łami roweru, trzeba podziałać na nie siłą
styczną do opony. Aby zatrzy-mać koło, działamy siłą
styczną o przeciwnym zwrocie.
Siła działająca
prostopadle, tzn. w kierunku osi, nie spowoduje
zmian w ruchu koła.
Przykład ten wykazuje, że w ruchu obrotowym
ważna jest nie tylko wartość siły, ale także jej
kierunek i punkt przyłożenia.
Wielkość wywołująca ruch obrotowy nazywamy
momentem siły
, który definiujemy następująco:
F
x
r
M
F
x
r
M
F
r
sin
rF
M
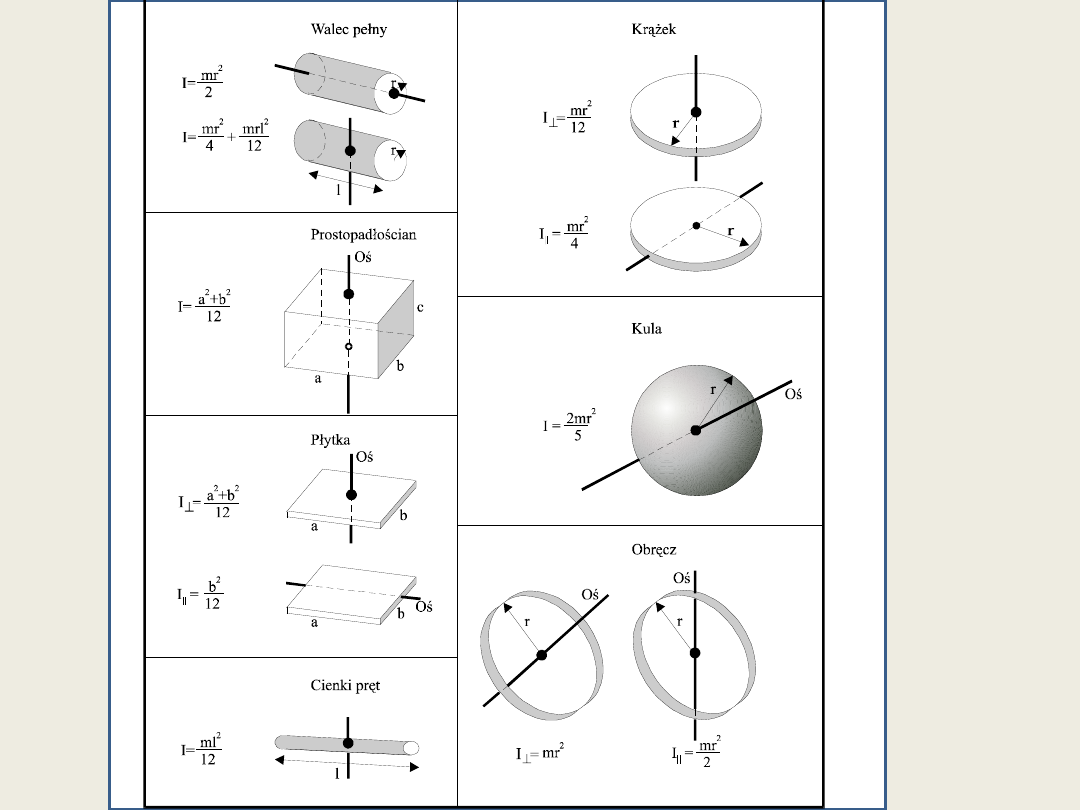
Moment bezwładności
W ruchu obrotowym bryły sztywnej ważną rolę odgrywa
sposób roz-mieszczenia masy bryły wokół osi obrotu.
Wielkością charakteryzującą tę własność bryły jest
moment bezwładności
.
Rozważmy bryłę sztywną będącą zbiorem punktów
materialnych ,
których odległości od osi obrotu
wynoszą odpowie-dnio
Momentem bezwładności I bryły względem
danej osi nazywa-my sumę iloczynów mas
poszczególnych punktów bryły i kwadratów ich
odległości od danej osi, a więc
n
2
1
m
...
m
,
m
n
2
1
r
...
r
,
r
n
1
i
2
i
i
r
m
I
dm
r
I
2
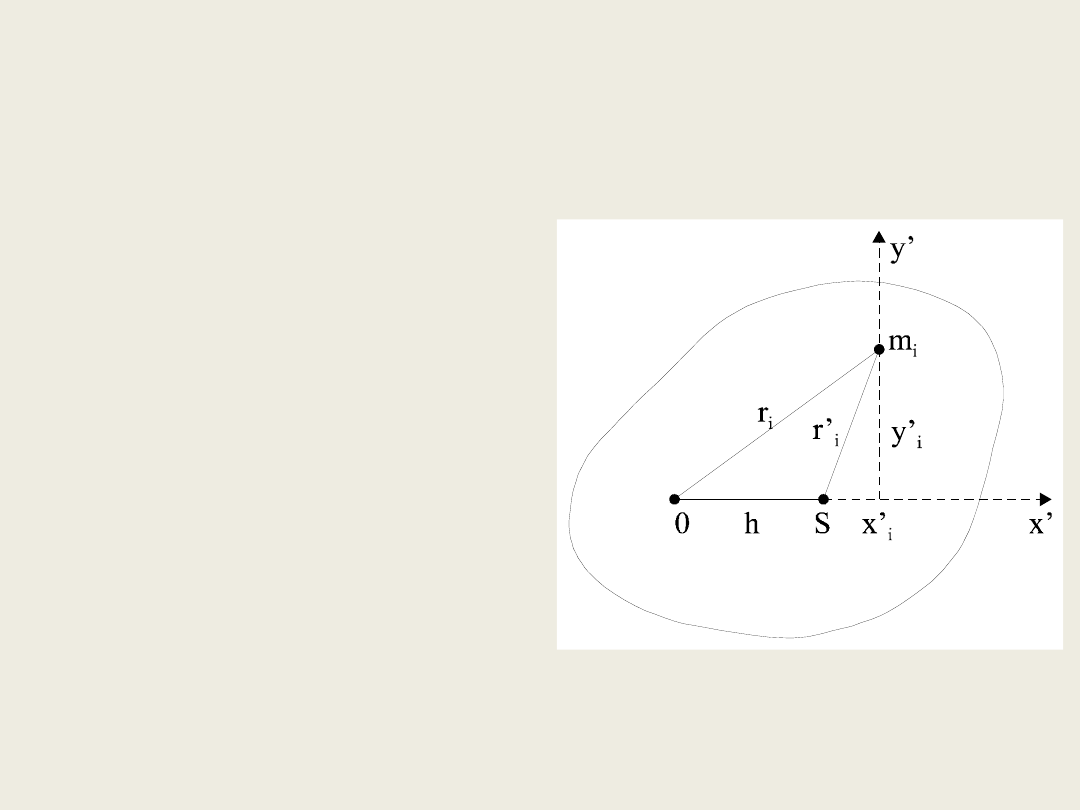
Twierdzenie Steinera
Zastanówmy się obecnie, czy istnieje jakiś związek
pomiędzy momentem bezwładności względem osi
przechodzącej przez środek masy ciała, a momentem
bezwładności względem dowolnej innej osi równoległej
do tamtej.
2
s
mh
I
I
Moment bezwładności I
bryły
względem
dowolnej osi jest ró-
wny sumie momentu
bezwła-dności
I
s
względem osi równo-
ległej
przechodzącej
przez
śro-dek
masy
bryły
oraz
iloczynu
masy m tej bryły i
kwadratu odległości h
obu osi.
Momentu pędu
• moment pędu (kręt) cząstki o pędzie p i
znajdującej się w punkcie określonym wektorem
wodzącym r wynosi:
• wektor momentu pędu jest prostopadły do
płaszczyzny wyznaczonej przez p i r
przedstawiamy go w postaci:
18
p
r
v
m
r
=
L
x
y
z
x
y
z
z
y
x
yp
xp
k
xp
zp
j
zp
yp
i
p
p
p
z
y
x
k
j
i
L
p
sin
mv
r
=
L
r
L
r
p
x
z
y
r
Posługując się pojęciem momentu pędu można II
zasadę dynamiki ruchu obrotowego zapisać
dt
I
d
dt
d
I
I
M
dt
L
d
M
czyli
Pochodna momentu pędu bryły sztywnej
względem czasu t jest równa momentowi siły
działającej na tę bryłę.
L
M
Zasada zachowania momentu pędu mówi, że moment
pędu bryły może ulec zmianie jedynie pod działaniem
momentu siły.
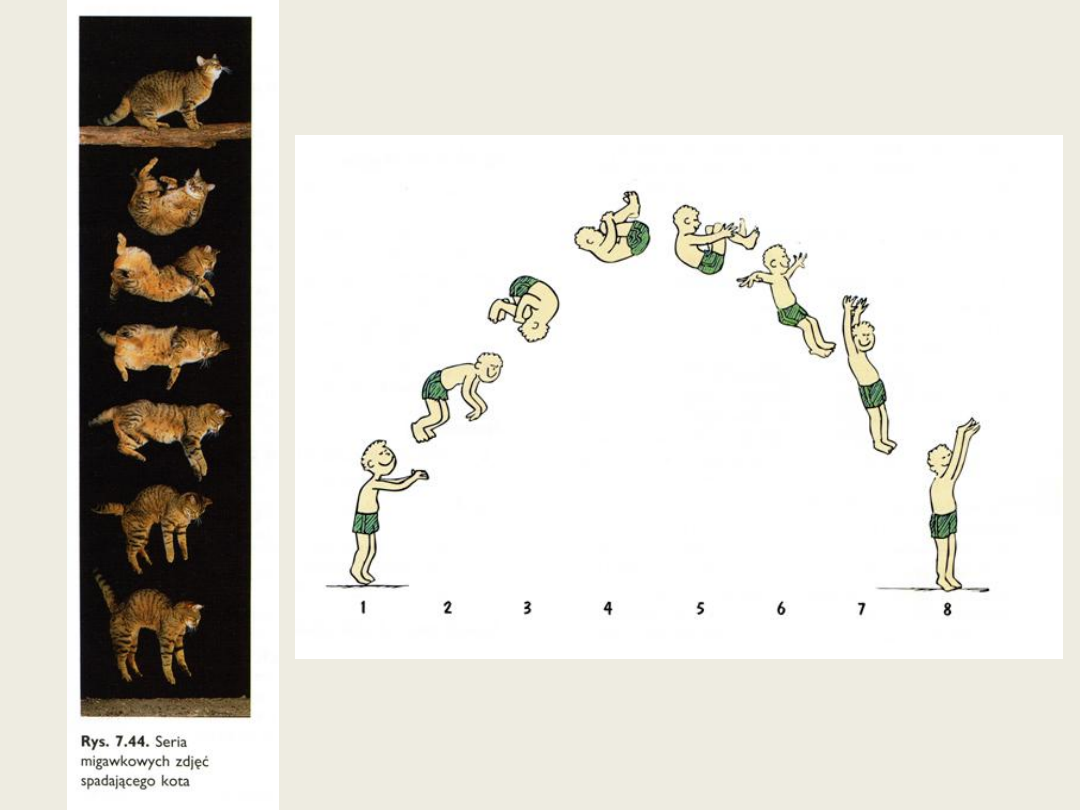
Jeżeli więc łyżwiarz na lodzie wykonuje piruet, to
rozsuwając szeroko ręce zwiększa swój moment bezwładności,
a tym samym zmniejsza prędkość kątową obrotu. i odwrotnie –
„skupiając” możliwie najbardziej całą swą masę dokoła osi
obrotu zmniejsza swój moment bezwładności, co powoduje
wzrost prędkości .
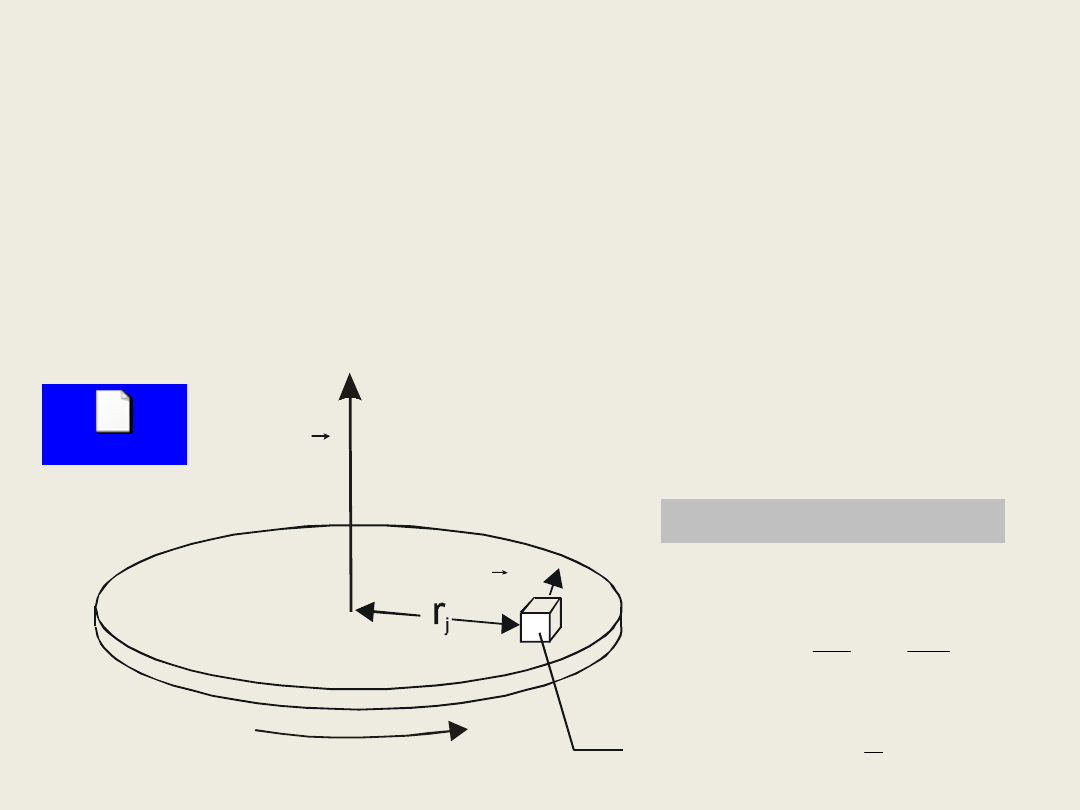
Obracający się dysk
rozważmy ciało obracające się z prędkością
wokół osi
przechodzącej przez środek masy ciała
21
m
j
L
j
v
j
2
j
j
j
j
j
j
j
m
r
r
m
r
v
m
r
=
L
I
L
mj
r
=
I
2
j
dm
2
r
=
I
gdzie
nazywamy momentem bezwładności
I
dt
d
I
=
dt
L
d
T
2
I
2
1
K
konc
pocz
konc
pocz
I
I
Precession.swf
Dzielimy ciało na małe elementy o masie m
j
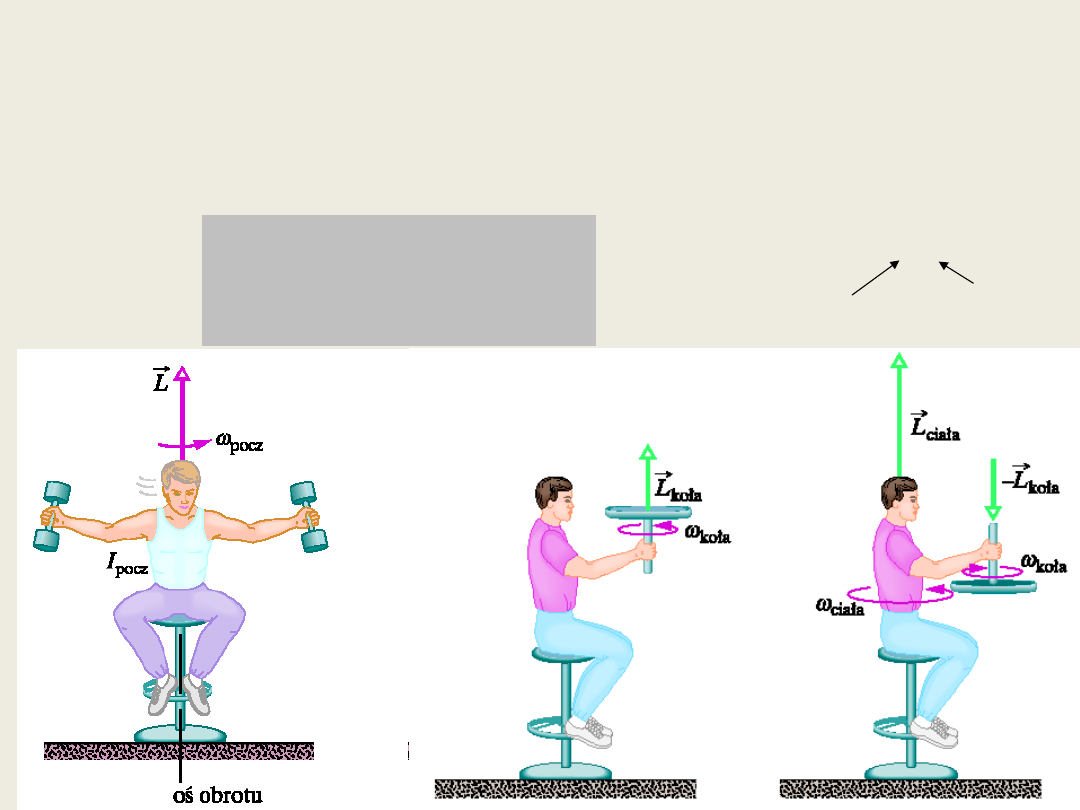
Student na obrotowym stołku
22
I
L
moment
bezwładności
konc
pocz
konc
pocz
konc
pocz
I
I
L
L
prędkość
kątowa
Analogia ruchu postępowego i
obrotowego
Ruch
postępowy
Ruch
obrotowy
wielkości
m, v, a
I, ,
Energia
kinetyczna
mv
2
/2
I
2
/2
II Zasada
dynamiki
F=ma
F=dp/dt
M=I
M=dL/dt
pęd, moment
pędu
p=mv
L=I
23
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
Wyszukiwarka
Podobne podstrony:
04 Wykł 04 Dynamika bryły
dynamika bryly sztywnej(1)
4 Dynamika bryly sztywnej id 37 Nieznany (2)
dynamika bryły sztywnej
04 Dynamika punktu materialnego I
Dynamiki bryły sztywnej
04 dynamika punktu materialnego
W7-dynamika bryly sztywnej, Studia, SiMR, II ROK, III semestr, Mechanika Ogólna II, Mechanika 2, 3 k
Dynamika bryły
dynamika bryły sztywnej
04 Dynamika punktu materialneg Nieznany (2)
wyk5 dynamika bryly
Dynamika bryły
4wyklad-dynamika bryly sztywnej, Dynamika ruchu bryły sztywnej
zestaw 8 dynamika bryly szt, SEMESTR I, MECHANIKA I FIZYKA STATYSTYCZNA, zadania
fiza, rozdz.4-Dynamika bryły sztywnej, 4
W NER nr 03 04 Dynamika
więcej podobnych podstron