Wykład z fizyki
I semestr
(dla Wydziału Wiertniczego G i G, rok akademicki
2012/13)
W1 - WSTĘP
dr inż. Jerzy Ostachowicz
WFiIS AGH, D-11, p.26
jostachowicz@fis.agh.edu.pl
Literatura
J. Wolny - Podstawy fizyki
Z. Kąkol - Fizyka dla inżynierów
Cz. Bobrowski FIZYKA- KRÓTKI
KURS
R. Resnick, D.Halliday t.I
FIZYKA 1
……..
INTERNET
WWW.FIS.AGH.EDU.PL
Tematyka wykładów w semestrze letnim ( 1-szy
semestr zajęć)
W1: WSTĘP: wielkości fizyczne, skalary-wektory
(21S)
W2: KINEMATYKA
(19S)
W3: DYNAMIKA PUNKTU MATERIALNEGO
(14S)
W4: DYNAMIKA BRYŁY SZTYWNEJ
(24S)
W5: STATYKA
(3S)
W6: GRAWITACJA
(8S)
W7: MECHANIKA PŁYNÓW
(10S)
W8: DRGANIA
(9S)
W9: FALE
(13S)
W10: TERMODYNAMIKA
(14S)
Wymiar zajęć: 23 godziny lekcyjne (6 terminów:4-3-4-3-
4-5 h)
Rygory: egzamin (po uzyskaniu zaliczenia ćwiczeń)
ĆWICZENIA RACHUNKOWE: wymiar 22 godziny lekcyjne
–udział obowiązkowy; tematyka - możliwie ściśle
powiązana z treścią wykładu
Rygory: zaliczenie na podstawie rezultatów „kartkówek”
WYKŁAD 1: Wielkości fizyczne - skalarne i wektorowe
Podstawowy matematyczny aparat fizyki
Opis świata wymaga zdefiniowania tzw. wielkości fizycznych;
Dzielimy je na podstawowe (długość, czas, masa,….)
i złożone, budowane z wielkości podstawowych według rozpoznanych i
sprawdzonych doświadczalnie zależności (np. prędkość, siła, ciśnienie..).
Działanie w nauce: hipoteza + doświadczenie → teoria ; zbieranie danych
→ korekta
Niezbędne jest określenie jednostki wielkości fizycznej, co pozwala
na porównywanie wyników pomiarów i na operacje liczbowe. Jednostki te
mogą być definiowane w różnych układach jednostek, np. historycznym
układzie CGS; obecnie w nauce i technice obowiązuje układ SI (Systeme
Internationale , fr.), dawniej zwany MKSA.
W zależności od liczby parametrów niezbędnych do ich opisu -
wielkości fizyczne dzielimy na skalary (opis- jedną liczbą) i wektory
(opis kilkoma liczbami –np. siły w przestrzeni kartezjańskiej)
Operacje na zależnościach między wielkościami fizycznymi
podstawowymi i złożonymi wymagają umiejętności zastosowania reguł i
technik zaczerpniętych z matematyki, to jest arytmetyki, algebry,
geometrii, rachunku wektorowego, rachunku różniczkowego i całkowego.
Matematyka uczy przetwarzania danych bez określenia ich związku z
rzeczywistością materialną. – W fizyce każda operacja na wielkościach
fizycznych musi mieć odniesienie to świata materialnego, co m.in. oznacza,
że obliczona czy zmierzona wielkość fizyczna ma wartość liczbową i
jednostkę.
WIELKOŚCI PODSTAWOWE I UZUPEŁNIAJĄCE , układ SI
Wielkość
Jednostka
Symbol
Wielkości
podstawowe
Długość
metr
m
Masa
kilogram
kg
Czas
sekunda
s
Liczność materii
mol
mol
Natężenie prądu
elektrycznego
amper
A
Temperatura
termodynamiczna
kelwin
K
Światłość
kandela
cd
Wielkości
uzupełniające
Kąt płaski
radian
rad
Kąt bryłowy
steradian
sr

Jednostki wtórne
(„Krotności”):
Przedros
tek
Oznacze
nie
Mnożnik
eksa
E
10
18
penta
P
10
15
tera
T
10
12
giga
G
10
9
mega
M
10
6
kilo
k
10
3
hekto
h
10
2
deka
da
10
1
-------
------
10
0
decy
d
10
-1
centy
c
10
-2
mili
m
10
-3
mikro
µ
10
-6
nano
n
10
-9
piko
p
10
-12
femto
f
10
-15
atto
a
10
-18
Definicje jednostek podstawowych (metr, kilogram,
sekunda, amper..)
• Metr (m) jest to długość drogi przebytej w
próżni przez światło w czasie 1/299792458 s
(Genewska Konferencja Miar 1983 r)
• Kilogram (kg) jest to masa
międzynarodowego wzorca tej jednostki masy
przechowywanego w Międzynarodowym
Biurze Miar w Sevres pod Paryżem
(Genewska Konferencja Miar 1901 r
)
• Sekunda (s) jest to czas równy 9 192 631
770 okresom promieniowania
odpowiadającego przejściu między dwoma
nadsubtelnymi poziomami stanu
podstawowego atomu cezu
133
Cs (Genewska
Konferencja Miar 1967 r)
Definicje , c.d.
• Amper (A) jest natężeniem prądu nie zmieniającego
się, który płynąc w dwóch równoległych
prostoliniowych przewodach nieskończenie długich o
przekroju kołowym znikomo małym, umieszczonych w
próżni w odległości 1 m, wywołuje między tymi
przewodami siłę równą 2*10
-7
niutona na każdy metr
długości przewodu (Genewska Konferencja Miar
1948 r)
• Kelwin (K) jest to 1/273,16 część temperatury
termodynamicznej punktu potrójnego wody
(Genewska Konferencja Miar 1967 r)
• Mol jest to liczność materii występująca, gdy liczba
cząstek jest równa liczbie atomów zawartych w masie
0,012 kg
12
C (Genewska Konferencja Miar 1971 r)
• Kandela (cd) jest to światłość, jaką ma w określonym
kierunku źródło emitujące promieniowanie
monochromatyczne o częstotliwości 540*10
12
Hz i
którego natężenie w tym kierunku jest równe 1/681
W/sr (Genewska Konferencja Miar 1979 r)
Definicje, c.d.
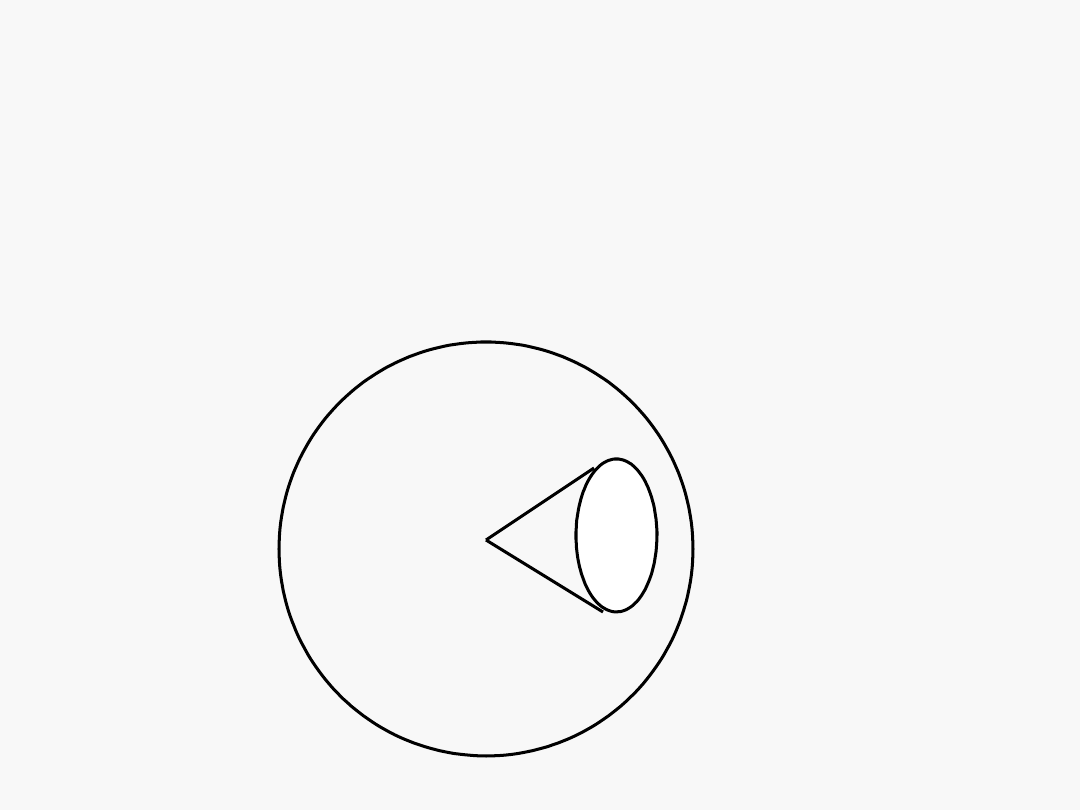
• Steradian jest kątem bryłowym o wierzchołku w środku
kuli, wycinającym z jej powierzchni część równą
powierzchni kwadratu o boku równym promieniowi tej kuli
• Radian jest to kąt płaski zawarty między dwoma
promieniami koła, wycinającymi z jego okręgu łuk o
długości równej promieniowi tego koła
S
O
=S /r
2
r

W obecnym stanie wiedzy o materii i oddziaływaniach, to jest
wiedzy o budowie atomu, jądra atomowego i sposobów generacji
promieniowania wiemy, że podstawowymi cechami składników
materii jest ich masa i ładunek elektryczny,
a znane oddziaływania to:
- Siły jądrowe oddziaływania pomiędzy nukleonami w jądrze atomu,
- Siły tzw. oddziaływań słabych
- Siły oddziaływania miedzy ładunkami elektrycznymi
(elektromagnetyczne)
- Siły oddziaływania między masami (grawitacyjne)
rodzaj natężenie
zasięg-
grawitacyjne
elektromagnetyc
zne
silne
słabe
2 • 10
-39
7,3 • 10
-9
1
10
-6
10
-15
m
< 10
-15
m
Oddziaływania
Modele
Łatwo spostrzec, że obserwowany świat materialny jest dosyć złożony.
Niezbędne jest jego modelowanie, to znaczy stosowanie uproszczeń z jednej
strony ułatwiających opis a z drugiej niewiele deformujących rzeczywistość,
dostatecznie przydatnych do liczbowych obliczeń i oszacowań.
Przykład 1:
W kinematyce (nauce o ruchu) i dynamice (nauce o efektach działania sił)
przydatne są następujące modele ciał:
- punkt materialny : również dla ciał rozciągłych, np. piłka, kamień,
Ziemia
- bryła sztywna zdefiniowana jako obiekt rozciągły, w którym niezależnie
od wartości działających sił odległości dowolnych dwóch punktów nie ulegają
zmianie
- ciało sprężyste, którego odkształcenie znika gdy znika siła
odkształcająca
W zależności od sytuacji wybieramy inne modelowanie tego samego obiektu.
Np. piłka spadająca w polu grawitacyjnym może być modelowana punktem
materialnym – ale gdy obraca się wokół osi (rotuje) - bryłą sztywną.
Przykład 2– prawa dynamiki - (ruch postępowy)
Znane 3 prawa dynamiki dotyczące efektów
działania sił na punkt (-y) materialny (-e) możemy
wyrazić następująco:
• (1) –jeżeli na ciało (punkt materialny) nie działa siła F, lub
suma wektorowa działających sił jest zerowa – to ciało
pozostaje w spoczynku lub kontynuuje ruch ze stałą
prędkością po prostej (v= const,, np. v=0)
• (2) – jeżeli na ciało (punkt materialny o masie m) działa
siła F, która np. jest wypadkową działających sił, to ciało
doznaje przyspieszenia a proporcjonalnego do siły : F=
m a
• (3) – jeżeli ciało A działa na inne ciało B siłą F , to powstaje
siła reakcji -F oddziaływania ciała B na A, równa co do
wartości sile F ale przeciwnie skierowana
ALE:
dla bryły sztywnej musimy zmodyfikować w/w prawa i
uwzględnić możliwość wprowadzenia siłami ciała w ruch
obrotowy i ustalić adekwatne prawa dynamiki dla ruchu
obrotowego (patrz wykład 4)
Skalary i wektory
(Patrz także plik „Sk-Wekt” w
formacie jpg)
Przykłady wielkości skalarnych:
masa, droga, czas, objętość, ładunek, praca,
moc
Skalary posiadają tylko wartość;
matematyczne operacje na skalarach to algebra
Przykłady wielkości wektorowych:
przemieszczenie, prędkość, przyspieszenie, siła,
moment siły, pęd
Wektory posiadają:
wartość, kierunek, zwrot, punkt przyłożenia;
Matematyczne operacje na wektorach w przestrzeni
kartezjańskiej (x,y,z) zdefiniowane następująco:
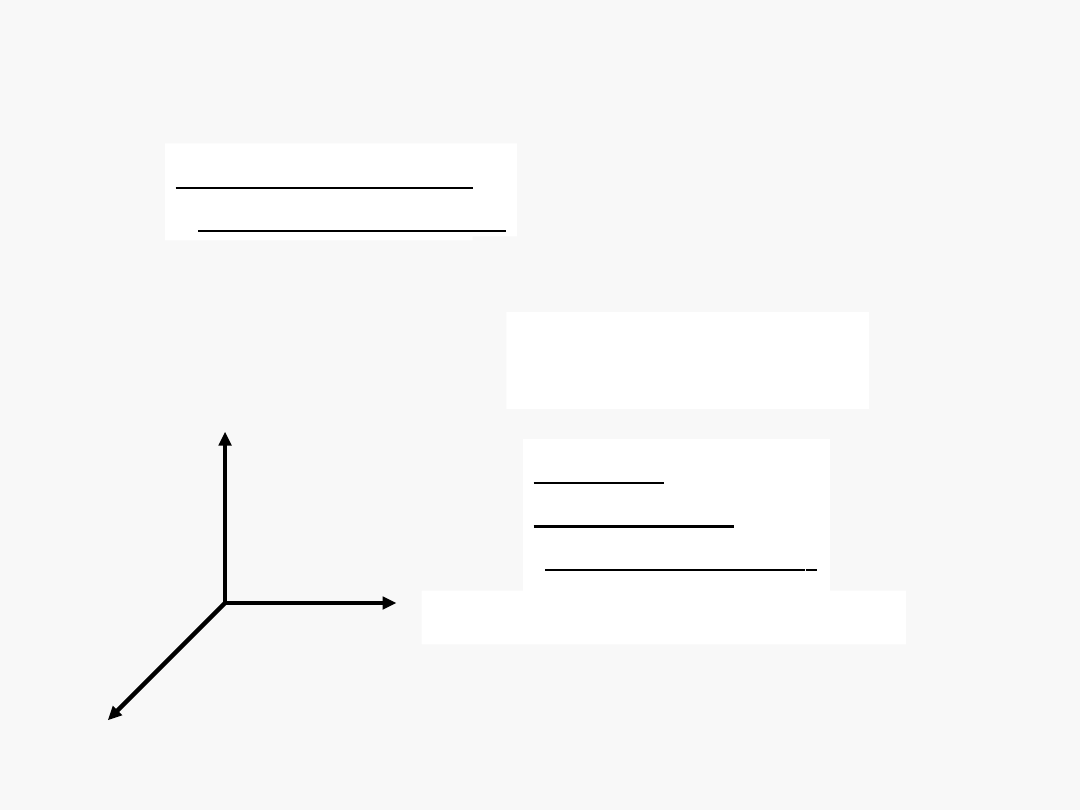
Wektor, składowe wektora
a = (a
x,
,a
y
,a
z
)
2
2
2
z
y
x
a
a
a
a
y
a
a
x
a
z
a
y
Wartość
wektora:
a = i a
x
+ j a
y
+ k a
z
gdzie:
i, j, k -
tzw. wersory osi
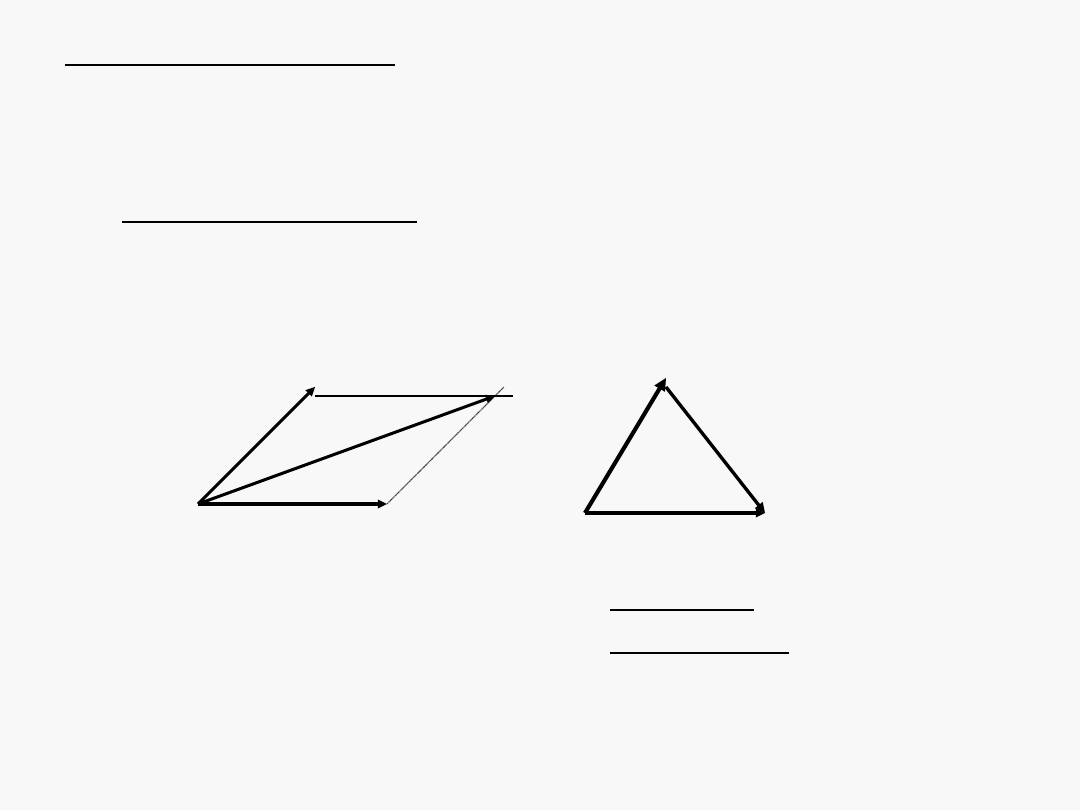
Sumowanie wektorów
Suma wektorów: c = a + b
a + b = (a
x
+ b
x
,a
y
+ b
y
,a
z
+ b
z
)
a
b
c=
a+b
b
a
k=a-b
Różnica
wektorów
k = a - b
Mnożenie skalar ∙ wektor: w = s ∙ a
w
x
= s a
x
, w
y
=s
a
y
, w
z
= s a
z
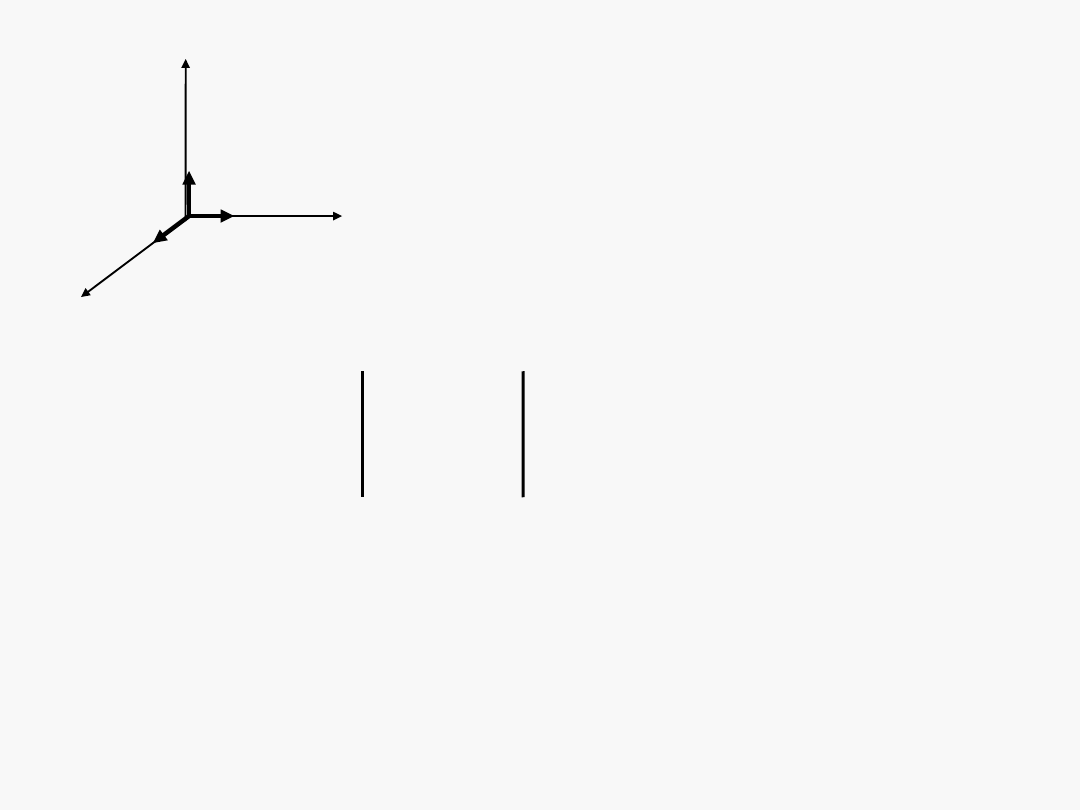
Iloczyny wektorów : skalarny i wektorowy
Iloczyn skalarny
skalar s = a ∙ b
s = a • b a
x
b
x
+a
y
b
y
+ a
z
b
z
| a • b | a• b •
cos ( )
Iloczyn
wektorowy
wektor c = a
x b
a
b
c = a x b
| a x b | = a • b • sin ( )
Iloczyn wektorowy, interpretacja:
•
obliczenie
- gdy wektory
• zadane są
współrzędnymi:
y
i
j
k
| i |= | j |= | k |=1
i j
k
a
x
a
y
a
z
b
x
b
y
b
z
a x b
=
=
=
i ( a
y
b
z
- a
z
b
y
) + j ( a
z
b
x
- a
x
b
z
) +k ( a
x
b
y
-
a
y
b
x
)
wersory osi
Przydatna matematyka: Pochodna funkcji
x
y
lim
(x)
f
dx
d
dx
dy
y
X
0
'
( f +g )’ = f ’ + g’
( f · g )’ = f ’· g
+f · g’
[f(g(x))]’ = f ’( g (x)) · g’(x
)
2
g
g
f
g
f
g
f
dx
dy
dx
d
dx
y
d
y
2
2
Definicje:
reguły obliczania
pochodnej:
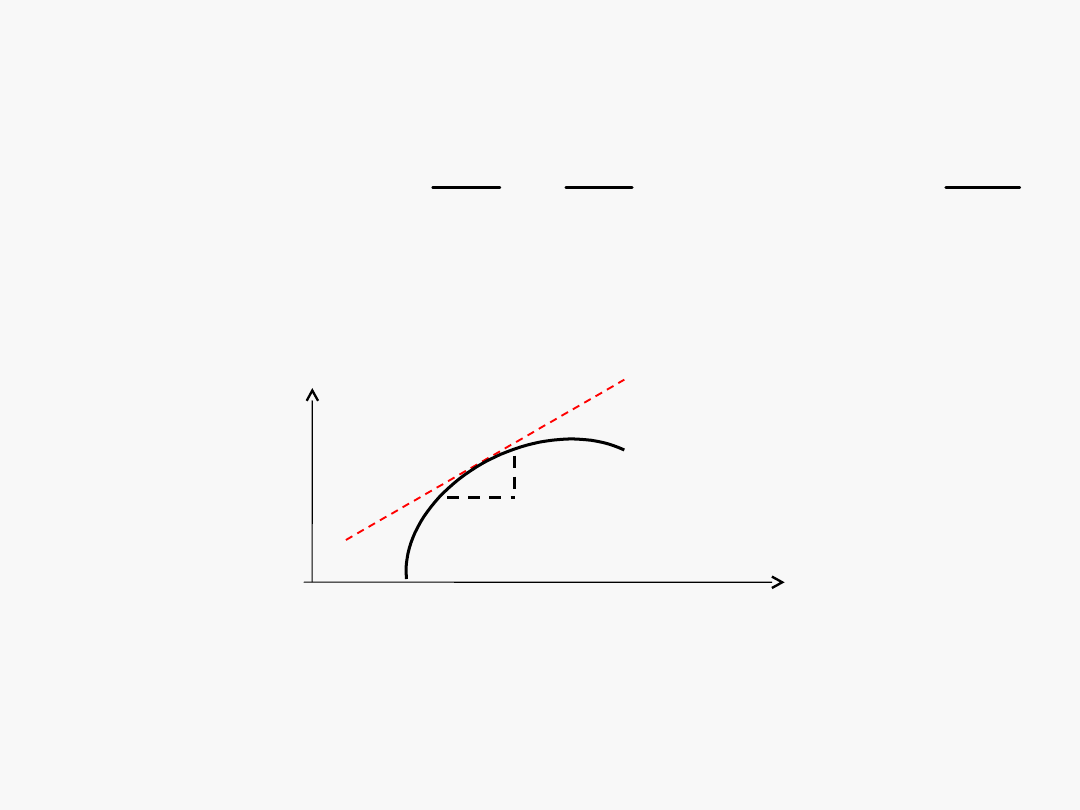
Interpretacja graficzna pochodnej
• Pochodna funkcji
y
st
= a x + b ; a = dy/dx
x
y
lim
(x)
f
dx
d
dx
dy
y
X
0
'
f(x)
X
∆ x
∆ y
styczna
Całki nieoznaczona i oznaczona
• całki
całka nieoznaczona
dx
dF
x
f
x
x
f
x
F
d
całka oznaczona
1
2
d
2
1
2
1
x
F
x
F
x
F
x
x
f
x
x
x
x
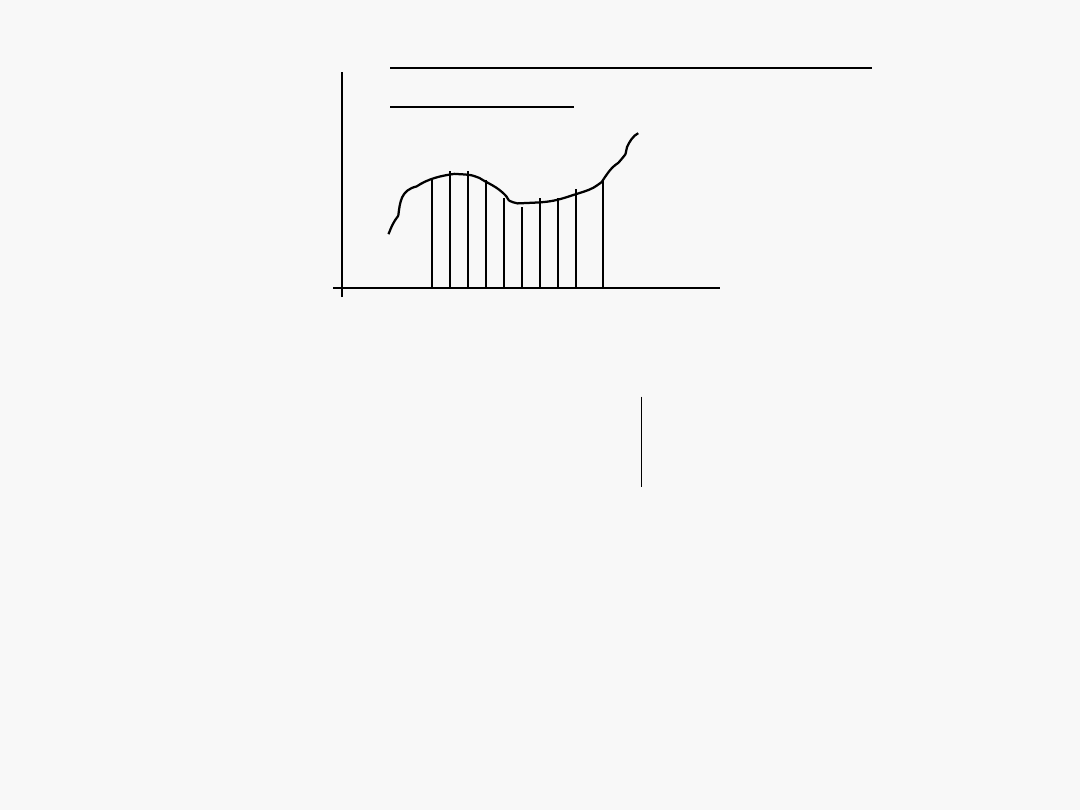
Interpretacja graficzna całki
oznaczone
j
S
x
1
x
2
f(x)
S =
1
2
d
2
1
2
1
x
F
x
F
x
F
x
x
f
x
x
x
x
Przykłady obliczania pochodnych niektórych
funkcji:
y= x y
’
= dy/dx = 1 - różniczka dy= dx
y= ax y
’
=dy/dx= a - różniczka dy = a dx , …. itd
y= x
n
y
’
=
dy/dx= nx
n-1
np. y= x
-1/2
dy/dx= -1/2 x
-1/2 - 1
= -1/2 x
-3/2
y= e
x
y
’
=
dy/dx= e
x
y= lnx y
’
=dy/dx= 1/x
y= sin x y
’
= dy/dx= cos x
y= cos x y
’
= dy/dx= - sin x
ekstremum funkcji y= f(x) y
extr
dla y
’
= dy/dx = 0
y
max
dla y
’’
= d
2
y/dx
2
< 0 ; y
min
dla y
’’
=
d
2
y/dx
2
> 0
funkcja ilorazu: np.: y = tg x = sin x/cos x y
’
= (1/cos
2
x)[(cos x cos x – sin
x(-sin x)]=
=1/cos
2
x
funkcja iloczynu: np. y= x tg x y
’
= 1 tg x + x (tg x)
’
=
tg x + x/ cos
2
x

Przykłady obliczania całek niektórych funkcji:
dx = x + C bo dy=1 dx + 0 ; (dalej stała całkowania C - opuszczona)
x
n
dx = x
n+1
/(n+1)
e
x
dx = e
x
dx/x = ln x
sin x dx= - cosx
Zastosowania:
E
p
= (k x) dx = k x
2
/2 (energia potencjalna przy odkształceniu
sprężystym)
s = v dt = v t ( droga s jeżeli v=const - ruch jednostajny)
s = v dt = (v
o
+ at) dt = v
o
t + at
2
/2 (droga s w ruchu ze stałym
przyspieszeniem a)
Document Outline
- Slide 1
- Literatura
- Slide 3
- Slide 4
- WIELKOŚCI PODSTAWOWE I UZUPEŁNIAJĄCE , układ SI
- Jednostki wtórne
- Slide 7
- Definicje , c.d.
- Definicje, c.d.
- Slide 10
- Modele
- Przykład 2– prawa dynamiki - (ruch postępowy)
- Slide 13
- Wektor, składowe wektora
- Sumowanie wektorów
- Iloczyny wektorów : skalarny i wektorowy
- Iloczyn wektorowy, interpretacja:
- Przydatna matematyka: Pochodna funkcji
- Interpretacja graficzna pochodnej
- Całki nieoznaczona i oznaczona
- Interpretacja graficzna całki oznaczonej
- Slide 22
- Slide 23
Wyszukiwarka
Podobne podstrony:
badania operacyjne, w1 Wstęp
W1 Wstep
io w1 wstęp
w1 wstep, antropologia, notatki
SO W1 Wstęp do systemów operacyjnych
w1 Wstęp
W1 Wstęp bez tła
Wstep W1 PK
W1 MIKRO RYZYKO-tablice do wykladow, Prawo, Wstęp do ekonomii i przedsiębiorczości, MIKROEKONOMIA
W1 MIKRO ekonomia metody, Prawo, Wstęp do ekonomii i przedsiębiorczości, MIKROEKONOMIA
W1 tworzenie mapy kategorialnej bud teorii nauk paradygmaty spol, pedagogika, semestr I, wstęp do pe
(w1) SPG Wstep
W1 TS wstep, kraty, piaskowniki
SI wstep
Farmakologia pokazy, Podstawy Farmakologii Ogólnej (W1)
W1 wprow
Zajęcie1 Wstęp
Wstęp do psychopatologii zaburzenia osobowosci materiały
więcej podobnych podstron