1. Co to jest mechatronika? Zastosowania mechatroniki.
Mechatronika jest dziedziną interdyscyplinarną, łączącą w sposób synergiczny wiedzę z klasycznej budowy maszyn, hydrauliki, pneumatyki, elektrotechniki elektroniki, optyki i informatyki.
Zastosowanie
Celem mechatroniki jest poprawianie (doskonalenie) funkcjonalności systemów technicznych oraz tworzenie nowych koncepcji maszyn i urządzeń z wbudowaną “sztuczną inteligencją”.
2. 7 nawyków skutecznego działania – Stephen R. Covey
Covey zaprezentował siedem zasad, które mają wg niego doprowadzić do harmonijnego życia zawodowego i prywatnego, bez poświęcania własnych wartości:
Bądź proaktywny
Zaczynaj z wizją końca
Rób najpierw to, co najważniejsze
Myśl w kategoriach wygrana – wygrana (Powinniśmy strać się zapewnić obydwu stroną korzyści z obopólnej współpracy. Kładzie szczególny nacisk na rozróżnienie podejścia przegrana-wygrana (czyli za dużo oddaliśmy drugiej stronie i z tego powodu czujemy się źle)
Staraj się najpierw zrozumieć, potem być zrozumiany
Synergia (Połączenie wszystkich cząstkowych pozostałych 5 nawyków daje większy efekt niż stosowanie ich wybiórczo. Synergia pozwala na otwarcie się na nowe możliwości i wyzwania. Stara zasada mówiąca że 2+2 w przypadku synergii =5 nie dokońca jest prawdą gdyż może to być 50 lub nawet 100)
Ostrzenie piły (Zarówno w sensie fizycznym jaki i duchowym. Porusza temat rozwoju umysłowego i dalszej nauki.)
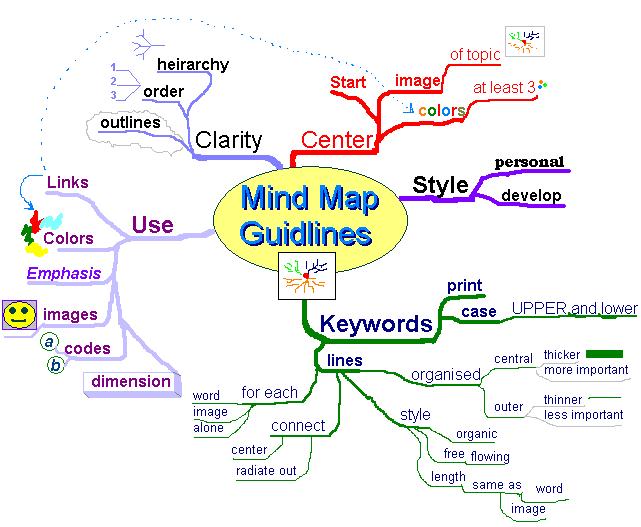
3. Narzędzia kreatywności (mind mapping, burza mózgów, strategia Walta Dysneya)
Mind mapping (mapowanie myśli) – rodzaj notowania pomysłów, planów działania. Polega na tym, że rysujemy „drzewko pomysłu” szczególny rodzaj notowania, mający według jego twórców zwiększać efektywność pracy i zapamiętywania oraz aktywować intuicję dzięki wykorzystaniu synergicznej współpracy obu półkul mózgowych
Przykładowa mapa myśli
Burza mózgów – jedna z twórczych metod rozwiązywania problemów. Polega na tym, że grupa osób zaangażowana w jakiś projekt podaje pomysły rozwiązania danego problemu. Aby burza mózgów spełniła swoją rolę musi byś spełnionych kilka założeń:
Każdy pomysł jest dobry
Nikt nie jest faworyzowany
Każdy pomysł jest zapisywany na tablicy
Jedną z cech tej metody jest to, że każdy pomysł (nawet pozornie nie związany bezpośrednio z omawianym problemem) jest dobry, ponieważ może on umożliwić innym spojrzenie na zagadnienie z innej perspektywy.
Kolejnym etapem burzy mózgów jest ocena zapisanych pomysłów przez grupe ekspertów nie uczestniczących w I etapie
Strategia Walta Disneya – strategia używana do planowania własnych przedsięwzięć. Podzielona jest na 3 etapy:
marzyciel – uruchomienie swojej wyobraźni, stworzenie idealnej wizji swojego pomysłu
realista – zastanowienie się ile z wizji jest realne do zrealizowania
krytyk – krytyczne spojrzenie na swój projekt, znajdowanie słabych punktów planu
4. Zarządzenie projektami – kompetencje w.g. PMBoK, diagramy: WBS, Pert i Gantt
Pięć podstawowych grup procesów w PMBoK wg edycji trzeciej to:
Procesy rozpoczęcia - zdefiniowanie i zatwierdzenie projektu w organizacji:
Procesy planowania –jak, w jaki sposób zrealizować zamierzone cele, jakimi środkami, kiedy, w jakiej kolejności itp.,
Procesy realizacji – wykorzystanie zasobów i ludzi w projekcie w celu wykonania założonego planu
Procesy kontroli – monitorują postępy prac w projekcie, badają ewentualne odchylenia,
Procesy zakończenia – przygotowanie formalnej akceptacji produktu finalnego projektu lub jego fazy.
Struktura podziału pracy, (WBS) - podstawowa technika w zarządzaniu przedsięwzięciami pomagająca określić i zorganizować zasięg przedsięwzięcia przy pomocy hierarchicznej struktury drzewa. Pierwsze dwa poziomy drzewa (korzeń i poziom 2.) określają zbiór oczekiwanych celów przedsięwzięcia. Na każdym kolejnym poziomie węzły w sumie reprezentują 100% zakresu węzła nadrzędnego. Dobrze zaprojektowana WBS opisuje cele, nie zaś zadania. Cele można określić z dużą dokładnością, dużo trudniej przewidzieć zadania stanowiące część planu przedsięwzięcia. Mając dobrze zaprojektowaną WBS można każdą czynność związaną z przedsięwzięciem przypisać do jednego i tylko jednego liścia drzewa WBS.
W metodzie PERT projekt jest przedstawiany w postaci diagramu sieciowego, czyli grafu skierowanego, którego wierzchołki stanowią zadania składające się na projekt, natomiast łuki reprezentują powiązania pomiędzy zadaniami i są do nich przypisane czasy trwania poszczególnych czynności wymaganych do przejścia do następnego zadania.
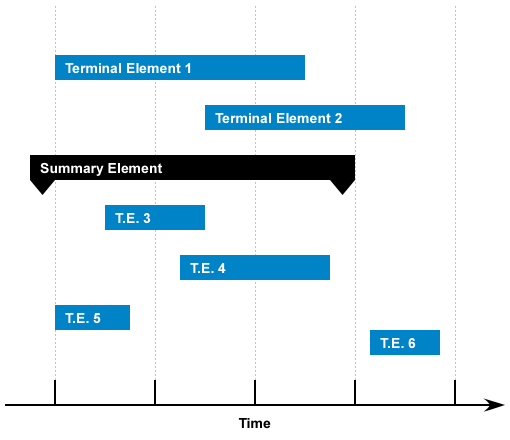
Diagram Gantta (Harmonogram Adamieckiego) – Uwzględnia się w nim podział projektu na poszczególne zadania, oraz rozplanowanie ich w czasie.
5. Obiekty statyczne i dynamiczne, charakterystyki przykładowych układów dynamicznych
Układ statyczny (układ bezinercyjny) - w przeciwieństwie do układu dynamicznego jest układem, w którym nie można wyróżnić żadnych zmiennych stanu. Układ statyczny nie zawiera w sobie żadnych części inercyjnych, które mogły by powodować gromadzenie energii (np. kondensatorów, sprężyn). Układ taki jedynie rozprasza energię.
Układ dynamiczny –matematyczny model rzeczywistego zjawiska przyrody, którego ewolucja jest wyznaczona przez stan początkowy; najczęściej jest opisany pewnym wektorowym równaniem różniczkowym, zwanym równaniem stanu. Teoria układów dynamicznych stanowi ważny dział matematyki znajdujący liczne zastosowania przy opisie konkretnych zjawisk, np w teorii sterowania. Układy złożone są najczęściej symulowane komputerowo.
Typy układów dynamicznych:
Gładkie (pochodzą od autonomicznych równań różniczkowych)
Topologiczne (dziedzina: dynamika topologiczna) - Przestrzeń {X} jest zbiorem wszystkich możliwych stanów, w których może znajdować się pewien fizyczny układ. Zbiór liczb rzeczywistych {R} reprezentuje oś czasu. Punkt (x,t) jest interpretowany jako stan układu po upływie czasu t, jeżeli wiemy, iż układ ten był w chwili t=0 w stanie x. Warunek drugi powyższej definicji mówi w istocie o tym, że sposób ewolucji początkowego stanu układu nie zależy od czasu, w którym ta ewolucja przebiega.
Teoriomiarowe - Przykładami takich odwzorowań są: przekształcenie piekarza oraz przesunięcie w lewo dla uogólnionego schematu Bernoulliego (układu Bernoulliego).
6. Kryteria projektowania układów sterowania, wskaźniki jakości regulacji (na wykresie)
Kryterium sterowania - kryterium określające warunek najczęściej dotyczący czasu, energii lub błędu sterowania
W dobrze zaprojektowanym układzie regulacji wartość uchybu w stanie nieustalonym powinna być jak najmniejsza, natomiast w stanie ustalonym powinna być równa 0. W przypadku układów optymalnych dąży się najczęściej do optymalizacji pewnej miary (wskaźnika jakości, kryterium sterowania) przy spełnieniu pewnych ograniczeń. Oczekuje się też często, że układ regulacji będzie niewrażliwy na zmiany parametrów i zakłócenia.
Regulator PID (znaczenie poszczególnych akcji)
Regulator PID (regulator proporcjonalno-całkująco-różniczkujący, ang. proportional-integral-derivative controller) – regulator stosowany w układach regulacji składający się z trzech członów: proporcjonalnego, całkującego i różniczkującego. Najczęściej jego celem jest utrzymanie wartości wyjściowej na określonym poziomie, zwanym wartością zadaną.
Regulatora PID używa się np. do sterowania temperaturą procesu, w tym wypadku działa on jak bardzo dokładny termostat. Może również sterować ciśnieniem, natężeniem przepływu, składem chemicznym, siłą, prędkością i innymi sygnałami.
Regulator proporcjonalno - całkująco - różniczkujące są regulatorami uniwersalnymi - wzmacniają, całkują i różniczkują odchyłkę regulacji. Sygnał wyjściowy regulatora PID jest proporcjonalny do sumy sygnału wejściowego, jego całki oraz jego pochodnej. Jedna część odpowiedzi skokowej regulatora PID jest proporcjonalna (P) do odchyłki regulacji, druga (I) jest całką z odchyłki regulacji, trzecia (D) - pochodną z odchyłki regulacji względem czasu.
Regulator PID stosuje się zazwyczaj do obiektów poddawanych wpływom zakłóceń o dużych i gwałtownych zmianach. Regulator ten stosuje się w przypadku gdy mamy do czynienia ze stałą wartości wielkości zadającej - a więc w układach regulacji stałowartościowej, np. układach regulacji temperatury.
8. Sygnały analogowe i cyfrowe, digitalizacja, błąd kwantyzacji
Cechami techniki analogowej są:
· jest ona tania (np. realizacja układów cyfrowych z elementami dyskretnymi
wymaga większych nakładów niż odpowiedni układ analogowy),
· często jest prostsza,
· dla jednakowej transmisji sygnał analogowy ma mniejsze wymagania dla kanału
niż sygnał cyfrowy,
· występuje ciągłe przetwarzanie amplitudowe i w czasie,
· często nie jest wymagane przekształcanie przetwarzanej wielkości,
· jest zwarta, również przy przekroczeniu wyspecyfikowanych zakresów sygnału.
Natomiast zalety techniki cyfrowej są następujące:
· jest tania przy zastosowaniu układów o wysokiej skali integracji,
· możliwa jest dowolna dokładność,
· duża odporność na zakłócenia i niezawodność,
· sygnały są możliwe do zapamiętania.
Sygnał analogowy – sygnał, który może przyjmować dowolną wartość z ciągłego przedziału (nieskończonego lub ograniczonego zakresem zmienności). Jego wartości mogą zostać określone w każdej chwili czasu, dzięki funkcji matematycznej opisującej dany sygnał.
Sygnał cyfrowy – sygnał, którego dziedzina i zbiór wartości są dyskretne.
Szum kwantyzacji powstaje w przetwornikach analogowo-cyfrowych oraz w przetwornikach CCD cyfrowych aparatów fotograficznych z powodu błędu zaokrąglenia. Podczas konwersji ciągłego sygnału analogowego na postać cyfrową, każda wartość jest zaokrąglana do najbliższej wartości dyskretnej. Powstający w ten sposób błąd określany jest mianem szumu kwantyzacji
9. Transmisja równoległa i szeregowa, błędy transmisji
W transmisji równoległej wszystkie bity określonej informacji (danych) są
przenoszone równocześnie), tzn. równolegle przez odpowiednią liczbę
przewodów danych (magistralę)
Transmisja szeregowa - tylko przez jeden przewód danych poszczególne bity są kolejno przenoszone (transmitowane) w czasie. Chociaż ten sposób transmisji informacji jest
związany z odpowiednio większymi nakładami czasu, to ze względu na znacznie
mniejsze nakłady instalacyjne i koszty jest on często stosowany. Ponieważ wszystkie informacje (bity) muszą być tworzone co najmniej równolegle, to nadajnik musi realizować równoległo-szeregowe, a odbiornik szeregowo-równoległe przetwarzaniem danych.
10. Zasada działania wybranych sensorów (tensometr, kontaktron, ultradźwiękowy,
pojemnościowy, indukcyjny, pomiar temperatury, akcelerometr, inklinometr)
Tensometry mierzą na zasadzie zmiany oporności małe odkształcenia (sprężyste) obciążonego
elementu. W ten sposób można mierzyć np. siłę, ciśnienie, przyspieszenie i naprężenia
w materiałach.
Kontaktron – łącznik elektroniczny hermetyczny sterowany polem magnetycznym.
Ultradźwiękowy czujnik odległości jest często stosowany np. do pomiaru poziomu paliwa
w baku samochodów. Krótkie impulsy (niesłyszalne) dźwiękowe (np. f=150 kHz) są wysyłane,
odbijają się od powierzchni paliwa i są znowu odbierane przez czujnik. Na podstawie pomiaru
czasu pomiędzy wysłaniem i odbiorem impulsu (czas przebiegu) jest określana odległość.
Pojemnościowo - zmiany odległości płytek (okładzin) kondensatora lub własności dielektryka
powodują zmianę pojemności. Na tej zasadzie można mierzyć położenie, grubość warstwy,
ciśnienie lub wilgotność.
Indukcyjne - indukcyjność cewki lub sprzężenia pomiędzy cewkami można zmieniać przez
przesuwanie rdzenia ferromagnetycznego. Przy szybkich ruchach można wykorzystać
Inklinometr to rodzaj przyrządu, obecnie najczęściej elektronicznego czujnika, służącego do określania kąta wychylenia dowolnych obiektów od pionu wyznaczonego przez siłę grawitacji ziemskiej. Najpopularniejsze obecnie czujniki przechyłu wykorzystują mikromechaniczne elementy krzemowe (MEMS), realizując pomiar na zasadzie pojemnościowej.
11. Czujniki optoelektroniczne, kamera, obiektyw, oświetlenie
Zasada działania polega na wysyłaniu wiązki promieni świetlnych przez nadajnik oraz na odbieraniu jej przez odbiornik. Czujnik ten reaguje na obiekty przecinające wiązkę światła pomiędzy nadajnikiem a odbiornikiem lub na wiązkę odbitą od obiektu. Stosowane są te czujniki do określania poziomu cieczy i materiałów sypkich, kontroli położenia ruchomych części maszyn oraz do identyfikacji obiektów znajdujących się w zasięgu działania czujników, Czujniki te mogą generować sygnał przy pomocy którego można zliczać przesuwające się przedmioty, albo liczyć ilość obrotów jakiegoś elementu. Czujniki optyczne charakteryzują się dużymi strefami wykrywania obiektów. Natomiast wadą tego czujnika jest to, że nie może pracować w miejscach zanieczyszczonych.
12. Przetworniki pomiaru położenia (inkrementalne i absolutne)
Enkoder inkrementalny, przyrostowy, impulsowy – przetwornik, którego zadaniem jest generowanie impulsów (przyrosty kątowe) odpowiadających ruchowi obrotowemu. Charakterystyczną cechą tych enkoderów jest stała liczba impulsów na wyjściu do 10000 impulsów/obrót, odpowiadająca rozdzielczości systemu pomiarowego. W celu kontroli kierunku (prawo-lewo), drugi w kolejności sygnał jest przesunięty fazowo o 90°. Licznik zewnętrznego systemu kontroli może być ponownie ustawiany dodatkowym zerowym impulsem. Pomiar położenia następuje niezależnie od rozdzielczości wyjściowej enkodera. Oznacza to, że każda rozdzielczość od 1 do 32768 impulsów na obrót może być uzyskana na podstawie wewnętrznego próbkowania. Takie precyzyjne rejestrowanie mechanicznego ruchu obrotowego i jego zamiana na sygnał elektryczny jest zasadnicze dla niezawodnego działania w pozycjonowaniu i CNC.
Enkoder absolutny – Silnik krokowy, silnik skokowy – silnik elektryczny, w którym impulsowe zasilanie prądem elektrycznym powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje za każdym razem ruch obrotowy o ściśle ustalonym kącie. Dzięki temu kąt obrotu wirnika jest ściśle zależny od liczby dostarczonych impulsów prądowych, a prędkość kątowa wirnika jest dokładnie równa częstotliwości impulsów pomnożonej przez wartość kąta obrotu wirnika w jednym cyklu pracy silnika. Kąt obrotu wirnika pod wpływem działania jednego impulsu może mieć różną wartość, zależnie od budowy silnika – jest to zwykle wartość od kilku do kilkudziesięciu stopni. Silniki krokowe, zależnie od przeznaczenia są przystosowane do wykonywania od ułamków obrotu na minutę do kilkuset obrotów na minutę.
13. Silniki prądu stałego i przemiennego, silniki krokowe
Silnik krokowy, silnik skokowy – Silnik krokowy, silnik skokowy – silnik elektryczny, w którym impulsowe zasilanie prądem elektrycznym powoduje, że jego wirnik nie obraca się ruchem ciągłym, lecz wykonuje za każdym razem ruch obrotowy o ściśle ustalonym kącie. Dzięki temu kąt obrotu wirnika jest ściśle zależny od liczby dostarczonych impulsów prądowych, a prędkość kątowa wirnika jest dokładnie równa częstotliwości impulsów pomnożonej przez wartość kąta obrotu wirnika w jednym cyklu pracy silnika. Kąt obrotu wirnika pod wpływem działania jednego impulsu może mieć różną wartość, zależnie od budowy silnika – jest to zwykle wartość od kilku do kilkudziesięciu stopni. Silniki krokowe, zależnie od przeznaczenia są przystosowane do wykonywania od ułamków obrotu na minutę do kilkuset obrotów na minutę.
Silnik synchroniczny - silnik elektryczny prądu przemiennego, w którym prędkość wirowania wirnika jest równa prędkości wirowania pola magnetycznego wytworzonego przez nieruchome uzwojenia stojana. silnik ten zwykle posiada trójfazowe uzwojenie stojana, wytwarzające magnetyczne pole wirujące. Różnice występują w wirnikach tych silników. Starsze rozwiązania budowy silników synchronicznych zakładają, że wirnik wykonany jest w postaci uzwojenia nawiniętego na rdzeniu i zasilanego, za pośrednictwem pierścieni ślizgowych i szczotek, ze źródła prądu stałego lub zmiennego. Wirniki te wykonuje się w dwojaki sposób, jako: wirniki cylindryczne (z utajonymi biegunami) lub wirniki z biegunami jawnymi. Każdy biegun posiada własne uzwojenie nawinięte na rdzeniu bieguna. Poprzez nadawanie odpowiedniego kształtu nabiegunnikom uzyskuje się odpowiedni rozkład wartości i kierunku pola magnetycznego na obwodzie wirnika.
Silnik prądu stałego – silnik elektryczny zasilany prądem stałym służący do zamiany energii elektrycznej na energię mechaniczną. Jako maszyna elektryczna prądu stałego może pracować zamiennie jako silnik lub prądnica. Większość silników prądu stałego to silniki komutatorowe, to znaczy takie, w których uzwojenie twornika zasilane jest prądem poprzez komutator. Jednak istnieje wiele silników prądu stałego które nie posiadają komutatora lub też komutacja przebiega na drodze elektronicznej.
1.stojan z magnesem trwałym;
2.wirnik z uzwojeniem twornika – prostokątna ramka z drutu;
3.szczotki – doprowadzające prąd do uzwojenia twornika;
4.komutator – pierścień ze stykami – wyprowadzenia z ramki (uzwojenia twornika);
Silnik elektryczny prądu stałego zbudowany jest z dwóch magnesów zwróconych do siebie biegunami różnoimiennymi, tak aby pomiędzy nimi znajdowało się pole magnetyczne. Pomiędzy magnesami znajduje się przewodnik w kształcie ramki podłączony do źródła prądu poprzez komutator i ślizgające się po nim szczotki. Przewodnik zawieszony jest na osi, aby mógł się swobodnie obracać. Na ramkę, w której płynie prąd elektryczny, działa para sił elektrodynamicznych z powodu obecności pola magnetycznego. Siły te powodują powstanie momentu obrotowego. Ramka wychyla się z położenia poziomego, obracając się wokół osi. W wyniku swojej bezwładności mija położenie pionowe (w którym moment obrotowy jest równy zero a szczotki nie zasilają ramki). Po przejściu położenia pionowego ramki, szczotki znów dotykają styków na komutatorze, ale odwrotnie, prąd płynie w przeciwnym kierunku, dzięki czemu ramka w dalszym ciągu jest obracana w tym samym kierunku.
14. Aktuatory pneumatyczne i hydrauliczne
Aktuatory (człony wykonawcze) są własnymi składnikami układów
mechatronicznych. Porównując aktuator z człowiekiem, to stanowi on mięśnie, które
są niezbędne do wykonania ruchów lub uzyskania sił.
Hydraulika - Strumień oleju pod ciśnieniem w obwodach hydraulicznych zwykle musi
być wytwarzany przez dodatkowo zainstalowany zasilacz hydrauliczny. Ciśnienia
robocze wynoszą od 100 do 400 bar. Zaletami układów hydraulicznych jest
uzyskiwanie dużych wartości sił oraz zwarta budowa napędów.
Pneumatyka Układy pneumatyczne są realizowane zarówno na podciśnienie
(szczególnie w samochodach ciężarowych), jak i na nadciśnienie (względem ciśnienia
atmosferycznego). Wartości ciśnienia są zwykle ograniczone do 6–8 bar,
a w automatyzacji procesów do 1,4 bar, co w porównaniu z układami hydraulicznymi
prowadzi do dużych wymiarów (gabarytów) w tych przypadkach, gdy wymagane są
większe wartości sił. Konieczne jest zwykle także uzdatnianie sprężonego powietrza.
Napędy pneumatyczne charakteryzują się niezawodną i cichą pracą.
15. Aktuatory piezoelektryczne, magnetostrykcyjne, z cieczą magnetoreologiczną, z pamięcią kształtu
piezoelektryczne człony wykonawcze mają
zdolność przetwarzania zarówno wielkości mechanicznych w elektryczne jak
i elektrycznych w mechaniczne. To dwukierunkowe przetwarzanie daje się
wykorzystać m.in. do zadań przemieszczania. Techniczne wykorzystanie efektu
piezoelektrycznego jest jednak możliwe tylko przez zastosowanie odpowiedniej
piezoceramiki. W połączeniu z polami elektrycznymi dają się uzyskać zmiany. Ruch roboczy jest sterowany przez podawanie napięcia. Jego realizacja odbywa z możliwością pokonywania dużych sił oporu.
Magnetostrykcyjne
W różnych materiałach ferromagnetycznych wskutek działania zewnętrznego pola
magnetycznego zmieniają się odległości między atomami. Dzięki temu za pomocą
sterowanego natężenia pola magnetycznego H wskutek zjawiska magnetostrykcji
daje się uzyskiwać względne zmiany długości, których wartości dla materiałów
o dużej magnetostrykcyjności wynoszą 1–2 mm/m. Uzyskiwane siły są
większe niż dla porównywalnych piezoaktuatorów. Magnetostrykcyjne aktuatory są jeszcze obecnie ciągle w stadium rozwoju.
Ciecze magnetoreologiczne są jednorodnymi mieszaninami składającymi się
z cieczy z zawartymi w niej drobnymi cząstkami stałymi. Są one umieszczone w cieczy na bazie oleju silikonowego lub mineralnego albo też wody. Pod wpływem pola magnetycznego następuje wiązanie się ze sobą cząstek ferromagnetycznych. Uzyskuje się silnie anizotropowe przebiegi ze zmieniającą się lepkością aż do stanu ciała stałego. Bez oddziaływania pola magnetycznego ciecz magnetoreologiczna zachowuje się jak ciecz Newtonowska.
Zastosowanie cieczy magnetoreologicznej do regulowanego tłumienia drgań jest
od pewnego czasu przedmiotem intensywnych prac badawczych. Są już także pierwsze aplikacje w samochodach. Zastosowania układów tłumienia drgań z zastosowaniem cieczy
magnetoreologicznej są możliwe w różnych obszarach. Przykładem tego jest tłumienie
drgań w mostach. Innymi możliwymi zastosowaniami jest tłumienie ruchów i drgań
w obrabiarkach, robotach i maszynach manipulacyjnych. We wszystkich tych
potencjalnych przypadkach zastosowań zalety tłumienia drgań za pomocą cieczy
magnetoreologicznej można wykorzystać tylko wtedy, gdy tłumiony układ (obiekt
regulacji) będzie można wystarczająco dokładnie odwzorować za pomocą modelu
i przeprowadzić symulację, aby móc w sposób niezawodny regulować tłumienie.
Opracowane zostały nowe rodzaje aktuatorów, które są wykonane ze
stopów z pamięcią kształtu. Stopy z pamięcią kształtu przy osiągnięciu określonej temperatury zmieniają skokowo swój stan, czyli kurczą się, rozciągają się, lub też stają się super-elastyczne.
16. Sterowniki PLC, architektura, działanie, programowanie w języku LD (ladder diagram)
uniwersalne urządzenie mikroprocesorowe przeznaczone do sterowania pracą maszyny lub urządzenia technologicznego. Sterownik PLC musi zostać dopasowany do określonego obiektu sterowania poprzez wprowadzenie do jego pamięci żądanego algorytmu działania obiektu. Cechą charakterystyczną sterowników PLC odróżniającą ten sterownik od innych sterowników komputerowych jest cykliczny obieg pamięci programu. Algorytm jest zapisywany w dedykowanym sterownikowi języku programowania. Istnieje możliwość zmiany algorytmu przez zmianę zawartości pamięci programu. Sterownik wyposaża się w odpowiednią liczbę układów wejściowych zbierających informacje o stanie obiektu i żądaniach obsługi oraz odpowiednią liczbę i rodzaj układów wyjściowych połączonych z elementami wykonawczymi, sygnalizacyjnymi lub transmisji danych.
Cykl pracy sterownika można zapisać krokowo:
Autodiagnostyka
Odczyt wejść
Wykonanie programu
Zadania komunikacyjne
Ustawienia wyjść
LD (Ladder Diagram) logika drabinkowa - schemat zbliżony do klasycznego rysunku technicznego elektrycznego
17. Obrabiarki sterowane numerycznie, programowanie, sterownik CNC
Obrabiarka sterowana numerycznie (skrót NC z ang. Numerical Control) – obrabiarka, która przetwarza dyskretne wartości wejściowe w postaci binarnej i impulsowej na odpowiednie ruchy robocze.
Charakterystycznymi cechami takich obrabiarek są:
nośnik danych, czyli urządzenie wejściowe z informacjami sterującymi w postaci kart, taśm, dyskietek itp.,
przetwornik danych, przetwarzający informacje zawarte na nośniku na sygnały sterujące napędami
osobne napędy każdej osi przesuwu i wrzeciona,
sprzężenie zwrotne danych pomiarowych i kontrolnych, czyli wyniki pomiarów przemieszczeń zwracane są do przetwornika umożliwiając korekcję położenia względem osi współrzędnych "x" , "y" i "z".
Computerized Numerical Control, CNC (pol. komputerowe sterowanie urządzeń numerycznych) – układ sterowania numerycznego, wyposażony w mikrokomputer, który można dowolnie interaktywnie zaprogramować. Układy CNC sterują obsługą graficznego monitora, na którym wyświetlane są programy NC, informacje o narzędziach, informacje korekcyjne narzędzi, które są bardzo istotne przy skrawaniu powierzchni o różnych kątach nachylenia w stosunku do osi Z (oś Z we wszystkich maszynach CNC jest równoległą do głównego ruchu roboczego), parametrów obróbczych, poprawność programu, integrują maszynę z innymi systemami komputerowymi. Termin ten zwykle używany jest w odniesieniu do obróbki materiałów za pomocą komputerowo sterowanych urządzeń (takich jak frezarki czy tokarki, elektrodrążarki) zdolnych czytać standardowy kod sterujący G code. Obróbka CNC pozwala na szybkie, precyzyjne i wysoce powtarzalne wykonanie często bardzo złożonych kształtów.
18. Robotyka, zadanie proste i odwrotne kinematyki, sterowniki RC
Robotyka – interdyscyplinarna dziedzina wiedzy działająca na styku mechaniki, automatyki, elektroniki, sensoryki, cybernetyki oraz informatyki. Domeną robotyki są również rozważania nad sztuczną inteligencją – w niektórych środowiskach robotyka jest wręcz z nią utożsamiana.
Proste zadanie kinematyki polega na obliczeniu pozycji i orientacji członu roboczego względem układu odniesienia
Odwrotne zadanie kinematyki polega na wyznaczeniu wszystkich możliwych zbiorów wartości przemieszczeń kątowych i liniowych (współrzędnych konfiguracyjnych) w połączeniach ruchowych, które umożliwią manipulatorowi osiągnięcie zadanych pozycji lub orientacji członu roboczego
Radio Control (pol. sterowanie radiowe) zdalne sterowanie realizowane drogą radiową. Podstawowy układ zdalnego sterowania składa się z nadajnika emitującego fale radiowe, odbiornika odbierającego sygnał i urządzenia, które ma wykonywać funkcje.
19. Lasery, zasada działania i zastosowanie
Laser – urządzenie emitujące promieniowanie elektromagnetyczne z zakresu światła widzialnego, ultrafioletu lub podczerwieni, wykorzystujące zjawisko emisji wymuszonej.
Zasadniczymi częściami lasera są: ośrodek czynny, rezonator optyczny, układ pompujący. Układ pompujący dostarcza energię do ośrodka czynnego, w ośrodku czynnym w odpowiednich warunkach zachodzi akcja laserowa, czyli kwantowe wzmacnianie (powielanie) fotonów, a układ optyczny umożliwia wybranie odpowiednich fotonów.
Ośrodek czynny
Oddziaływanie promieniowania z materią można wyjaśnić za pomocą trzech zjawisk: pochłaniania fotonów (absorpcji), emisji spontanicznej oraz emisji wymuszonej fotonu. Foton wyemitowany w wyniku emisji wymuszonej ma taką samą częstotliwość i polaryzację jak foton wywołujący emisję. Przykładowy foton wzbudzający musi mieć energię równą energii wzbudzenia atomu ośrodka. Atomy w stanie podstawowym pochłaniają takie fotony. Gdy w ośrodku jest więcej atomów w stanie wzbudzonym niż w stanie podstawowym zachodzi inwersja obsadzeń poziomów energetycznych. Stan wzbudzony jest stanem metastabilnym co zapewnia magazynowanie energii do czasu wyemitowania jako wiązki laserowej i jest warunkiem funkcjonowania urządzenia.
Układ pompujący
Zadaniem układu jest przeniesienie jak największej liczby elektronów w substancji czynnej do stanu wzbudzonego. Układ musi być wydajny by zapewnić inwersję obsadzeń. Pompowanie lasera odbywa się poprzez błysk lampy błyskowej (flesza), błysk innego lasera, przepływ prądu (wyładowanie) w gazie, reakcję chemiczną, zderzenia atomów, wstrzelenie wiązki elektronów do substancji.
Rezonator optyczny
Wzbudzony ośrodek czynny stanowi wprawdzie potencjalne źródło światła laserowego, jednak do powstania uporządkowanej akcji laserowej potrzebny jest jeszcze odpowiedni układ optyczny, zwany rezonatorem. Układ ten pełni rolę dodatniego sprzężenia zwrotnego dla światła o wybranym kierunku i określonej długości fali. Spośród wszystkich możliwych kierunków świecenia i wszystkich dostępnych dla ośrodka długości fal, jedynie światło o parametrach ustalonych przez rezonator będzie wzmacniane na tyle mocno, by doprowadzić do akcji laserowej. Aby emitowane światło laserowe mogło wydostać się poza rezonator (na zewnątrz lasera), przynajmniej jedno z luster powinno być częściowo przepuszczalne. W laserach impulsowych stosuje się często modulację czasową przepuszczalności luster, dzięki czemu cała energia wiązki zostaje uwolniona w chwili "otwarcia" lustra.
Warunek progowy akcji laserowej
Aby mogła zajść akcja laserowa, wzmocnienie promieniowania w obszarze czynnym musi co najmniej równoważyć straty promieniowania wewnątrz rezonatora (rozpraszanie, straty dyfrakcyjne) oraz emisję części promieniowania na zewnątrz rezonatora (np. przez częściowo przepuszczalne lustro wyjściowe).
Właściwości światła laserowego
rozbieżność wiązki;
spójność;
moc promieniowania i gęstość energii;
propagacja promieniowania laserowego w środowisku.
20. Przykłady technologii drukowania 3D
Możliwości wykorzystania drukarek przestrzennych zależą głównie od metody wytwarzania produktu, dostępnych materiałów oraz częściowo kubatury urządzenia. W wypadku FDM na to jakie materiały można wykorzystać wpływa w dużej mierze temperatura do jakiej może się rozgrzać wyciskarka i od jej budowy. W metodach, w których przedmiot jest cały czas zawieszony w innej substancji (jak w SLA oraz Selective laser sintering), ograniczeniem jest też to, że nie można tworzyć zamkniętych przestrzeni z pustym wnętrzem. Natomiast na precyzję wykonania wpływa głównie dokładność pozycjonowania elementów sterujących oraz sam materiał z jakiego wykonywany jest przedmiot.
Za pomocą różnego rodzaju drukarek 3D można wytworzyć:
gotowe produkty z tworzywa sztucznego (z ruchomymi elementami tylko w SLA oraz Selective laser sintering);
produkty wymagające obróbki (szczególnie w FDM może być konieczne przycięcie łączników i kolumienek oraz wygładzenie powierzchni);
inne przedmioty z topliwych materiałów w tym z czekolady czy metalu
elementy innych przedmiotów;
prototypy i inne produkty koncepcyjne;
formy do wykonania właściwych elementów lub prototypów;
w ograniczonej formie także różnego rodzaju tkanki.
21. Systemy wbudowane, mikrokontrolery – Arduino
Arduino – platforma open-source oparta na łatwym w obsłudze sprzęcie i oprogramowaniu.
Celem całej idei Arduino jest „odczarowanie” mikrokontrolerów, czyli pokazanie ludziom jak banalne są początki pracy z takim sprzętem, spopularyzowanie tworzenia mini-systemów sterowania i zachęcanie ludzi do wymyślania coraz to nowych zastosowań dla tego tupu systemów. Arduino może być wykorzystany do tworzenia samodzielnych interaktywnych obiektów lub może być podłączony do komputera-hosta.
Arduino – platforma programistyczna dla systemów wbudowanych oparta na prostym projekcie Open Hardware przeznaczonym dla mikrokontrolerów montowanych w pojedynczym obwodzie drukowanym, z wbudowaną obsługą wejścia/wyjścia oraz standaryzowanym językiem programowania.
Systemy wbudowane - Często w systemach mechatronicznych „wbudowane” są mikroprocesory i mikrokontrolery, za pomocą których realizowane są zadania sterowania lub regulacji. Przykładem takiego rozwiązania jest nowoczesna pralka automatyczna, która zawiera wbudowany mikrokontroler służący do wybierania różnych programów prania. Systemy wbudowane znajdują się w prawie wszystkich nowoczesnych obiektach technicznych, takich jak: samochody (np. asystent hamowania lub sterowanie dynamiki toru jazdy), samoloty. Zamiast tradycyjnego interfejsu człowiek-maszyna HMI, jaki jest stosowany w przypadku komputerów do ogólnego przetwarzania danych, w systemach wbudowanych występuje interfejs do otoczenia systemu technicznego tzn. stosowane są urządzenia sensoryczne oraz aktuatoryka.
22. Narzędzia CAx w mechatronice
Programy komputerowe służące do projektowania(CAD), analizy(CAE), czy produkcji(CAID).
Wyszukiwarka
Podobne podstrony:
mtr zaliczenie 2014v1
mtr-zaliczenie 2014v1
mtr zaliczenie 2014v1
TEST zalicz mikroskopia czescETI z odpowiedz
Zaliczenie strategia 2011a
praca zaliczeniowa wyrobiska
KOTŁY OKRĘTOWE ZALICZENIE II MECH
MTR 2009 Wstep do mechatr cz 3 (2)
Mechanika płynów zaliczenie wykładów
Karty zaliczeń BK
AM zaliczenie 4 styczeń 2012 i odpowiedzi wersja B
fizjologia kolokwium zaliczeniowe 2006stoma
Hydrologia - zaliczenie wyk, Inżynieria Środowiska, 3 semestr, Hydrologia
ściąga do ćwiczennia XII, Szkoła, penek, Przedmioty, Urządzenia nawigacyjne, Zaliczenie, egzamin, Ś
pyt od Marty, IŚ Tokarzewski 27.06.2016, V semestr COWiG, WodKan (Instalacje woiągowo - kanalizacyjn
Zaliczenie z receptury-2, materiały ŚUM, IV rok, Farmakologia, III rok, 7 - Receptura (TheMordor), Z
pyt dr Słowinska, analityka medyczna, Biofizyka analityka medyczna, Egzaminy, zaliczenia
egz TRB I 2009 c, Politechnika Poznańska, Budownictwo, Technologia Robót Budowlanych, Zaliczenie wyk
Przykłady pytań na zaliczenie biochemii
więcej podobnych podstron