Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
Simulink
Wprowadzenie: http://me-www.colorado.edu/matlab/simulink/simulink.htm
– interaktywny pakiet przeznaczony do modelowania, symulacji, analizy dynamicznych układów ciągłych, dyskretnych,
dyskretno-ciągłych w czasie
– zintegrowany z MATLAB-em (nie jest możliwe korzystanie z Simulink-a bez zainstalowania MATLAB-a)
– stosowany do projektowania i testowania urządzeń oraz systemów sterujących. Badanie układów metodami symulacyjnymi
znacznie zmniejsza koszty i czas, niezbędny do przygotowania lub modernizacji prototypów urządzeń i systemów sterowania
CEL ĆWICZEŃ LABORATORYJNYCH: zdefiniowanie modelu matematycznego rozważanego układu/procesu
dynamicznego poprzez opis za pomocą równań różniczkowych zwyczajnych, zbudowanie graficznego modelu (schematu
blokowego z wykorzystaniem bloków bibliotecznych Simulink-a), wykonanie eksperymentu symulacyjnego przy
zadanych parametrach symulacji, tworzenie graficznego interfejsu użytkownika umożliwiającego poprawne i wygodne
wprowadzanie danych oraz prezentację rezultatów obliczeń w postaci wykresów
Przykład modelowania 1
1)
Wahadło matematyczne - ciało wykonujące drgania pod wpływem siły grawitacji.
Zmienność kąta wychylenia wahadła przy uwzględnieniu oporów ośrodka,
siły grawitacji oraz działającej na nie siły wymuszającej opisuje równanie
postaci
2
2
2
sin
cos
d θ
dθ
ml
γ
mgl
θ
A
ωt
dt
dt
+
+
=
gdzie
θ ‒ kąt odchylenia wahadła od położenia w stanie równowagi
l ‒ długość wahadła
m ‒ masa wahadła
g ‒ przyspieszenie ziemskie (
2
9,80665
/
g
m s
=
)
A ‒ amplituda siły wymuszającej
ϖ ‒ częstotliwość siły wymuszającej, gdzie
2
;
2
g
π
l
ω
T
π
T
l
g
=
=
=
(ϖ jest częstością kołową drgań; T – okresem)
γ ‒ współczynnik oporu ośrodka
Z powyższego równania różniczkowego opisującego ruch wahadła wyprowadzić można następującą zależność
2
2
2
1
cos
sin
d θ
dθ
A
ωt
γ
mgl
θ
dt
dt
ml
=
−
−
Po podstawieniu za
g
ω
l
=
otrzymujemy
2
2
2
1
cos
sin
g
d θ
dθ
A
t
γ
mgl
θ
l
dt
dt
ml
=
−
−
θ
m
l
sinθ
y = l
cosθ
x = l
Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
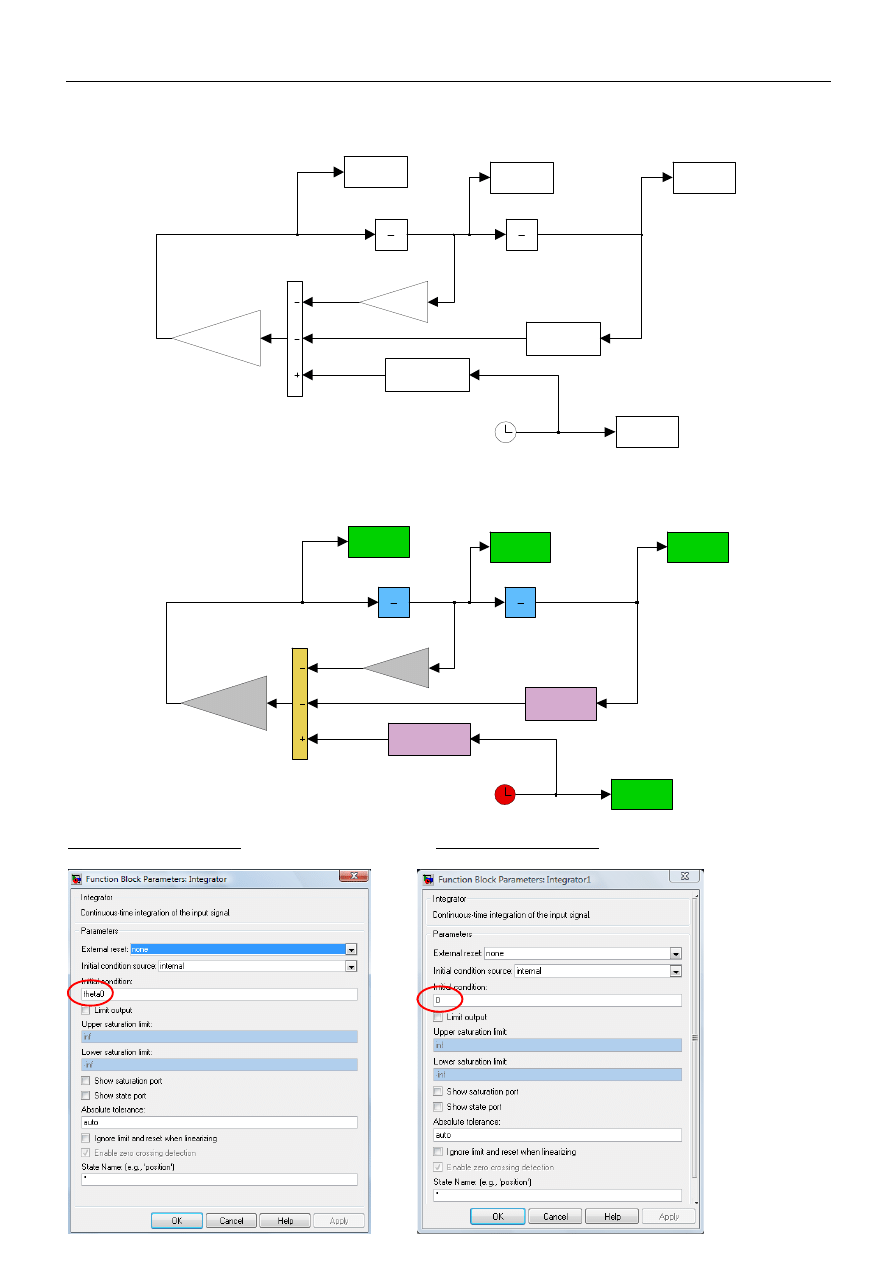
Schemat blokowy powyższego układu zbudowany w oparciu o równanie różniczkowe z wykorzystaniem bloków
bibliotecznych Simulink-a ma następującą postać:
To Workspace 3
d2theta
To Workspace2
t
To Workspace1
dtheta
To Workspace
theta
Sum
Integrator 1
1
s
Integrator
1
s
Gain 2
1/(m*(l^2))
Gain 1
gamma
Fcn1
A *cos(u*sqrt(g/l))
Fcn
m*g*l*sin(u)
Clock
Co można uczynić bardziej przejrzystym edytując teksty oraz wprowadzając odpowiednią kolorystykę
k
ą
t wychylenia
wahadła
d2theta
t
dtheta
theta
1
s
1
s
1/(m*(l^2))
gamma
A *cos(u*sqrt(g/l))
m *g*l*sin(u)
początkowe wychylenie wahadła :
początkowa prędkość wahadła :
Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
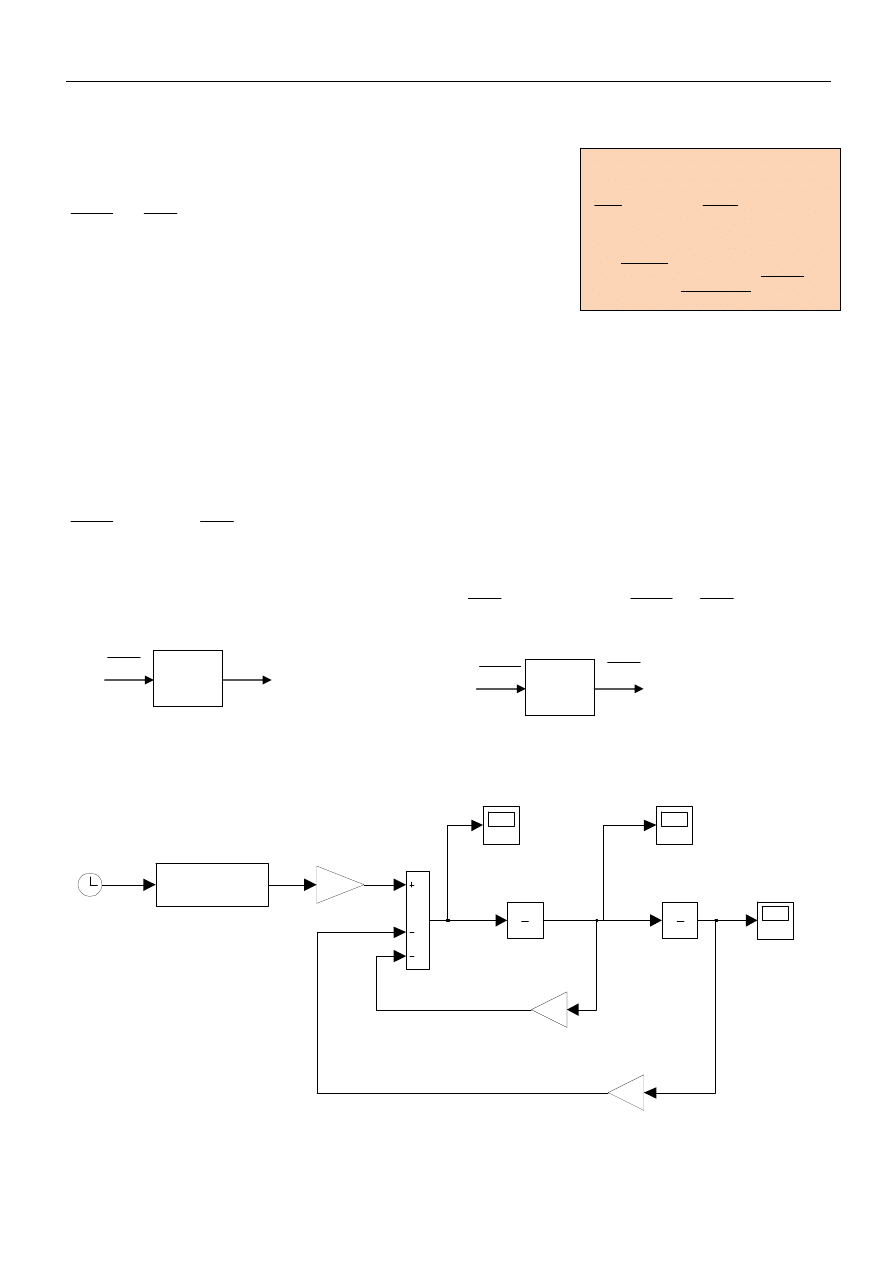
Przykład modelowania 2
Rozważmy obiekt opisany za pomocą równania różniczkowego drugiego rzędu
( )
( )
( )
( )
2
2
1,5
2
2,5
d y t
dy t
y t
z t
dt
dt
+
+
=
(1)
gdzie y(t) oznacza wyjście układu (odpowiedź) na sygnał wejściowy (zadany)
z(t), przy warunkach początkowych określających stan układu w chwili
początkowej (rozpoczęcia procesu sterowania, t = 0)
( )
( )
' 0
2
0
1
y
y
= −
=
oraz zadanym sygnale wejściowym postaci
( )
(
)
2.3
sin
t
z t
t e
−
=
⋅
Z równania (1) należy wyznaczyć wzór na drugą pochodną
( )
( )
( )
( )
2
2
2,5
1,5
2
d y t
dy t
z t
y t
dt
dt
=
−
−
Na schemacie blokowym blok całkowania odpowiada uzyskaniu sygnałów będących pochodnymi niższego rzędu, co wynika z
odwrotności operacji całkowania względem różniczkowania, tj.
( )
( )
( )
( )
2
2
dy t
d y t
dy t
dt
y t
dt
dt
dt
dt
=
=
∫
∫
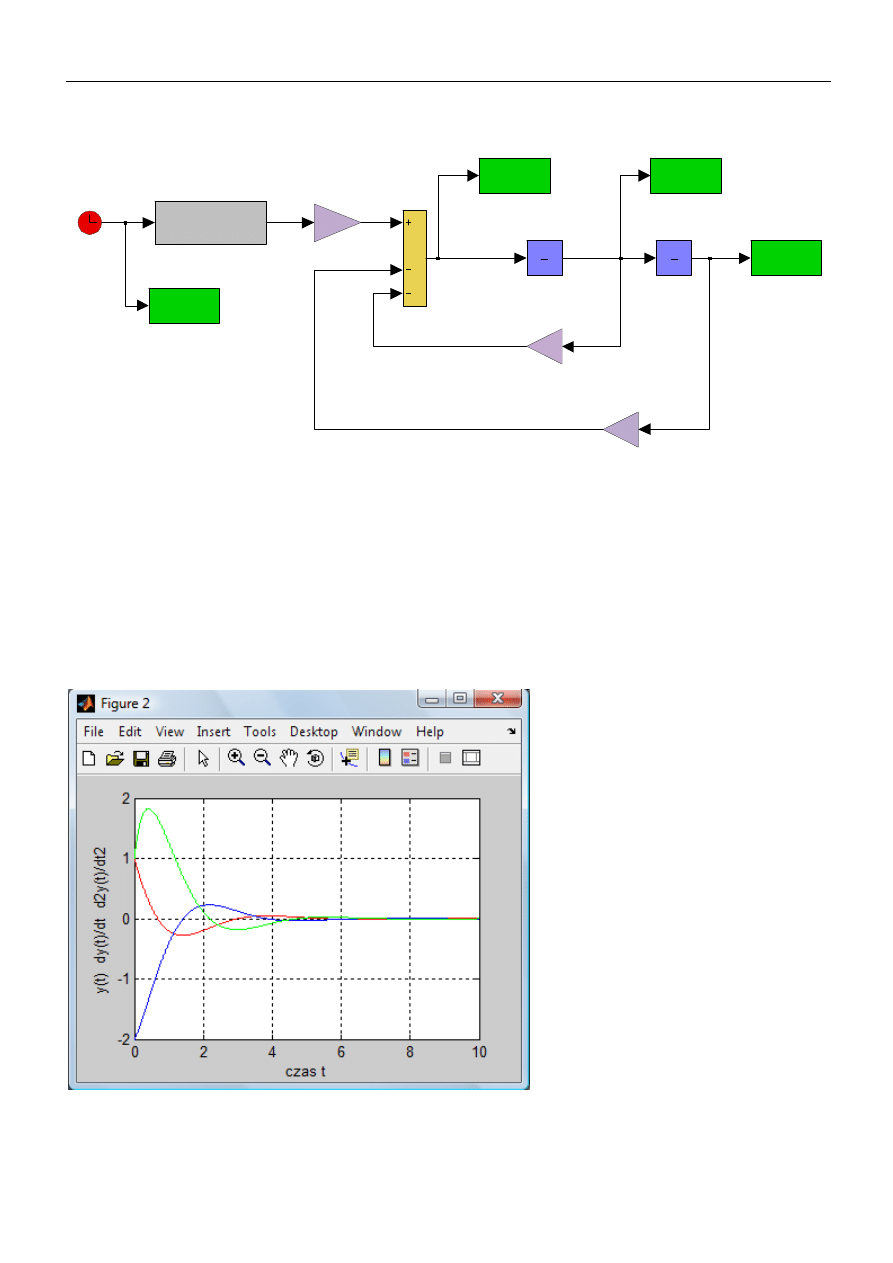
Schemat modelu układu w Simulinku
Sum
Scope 2
Scope 1
Scope
Integrator 1
1
s
Integrator
1
s
Gain 2
2.5
Gain 1
2
Gain
1.5
Fcn
sin(u*exp(-2.3*u))
Clock
∫
( )
2
2
d y t
dt
( )
dy t
dt
( )
''
y t
( )
'
y t
∫
( )
dy t
dt
( )
y t
( )
'
y t
( )
y t
Równoważnym oznaczeniem pochodnych po
czasie
są
( ) ( )
( ) ( )
2
2
dy t
d y t
y t
y t
dt
dt
=
=
ɺ
ɺɺ
W fizyce najczęstszą interpretacją sygnału y(t)
jest położenie obserwowanego ciała, jego
pierwsza pochodna reprezentuje prędkość, zaś
druga pochodna – przyspieszenie.
Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
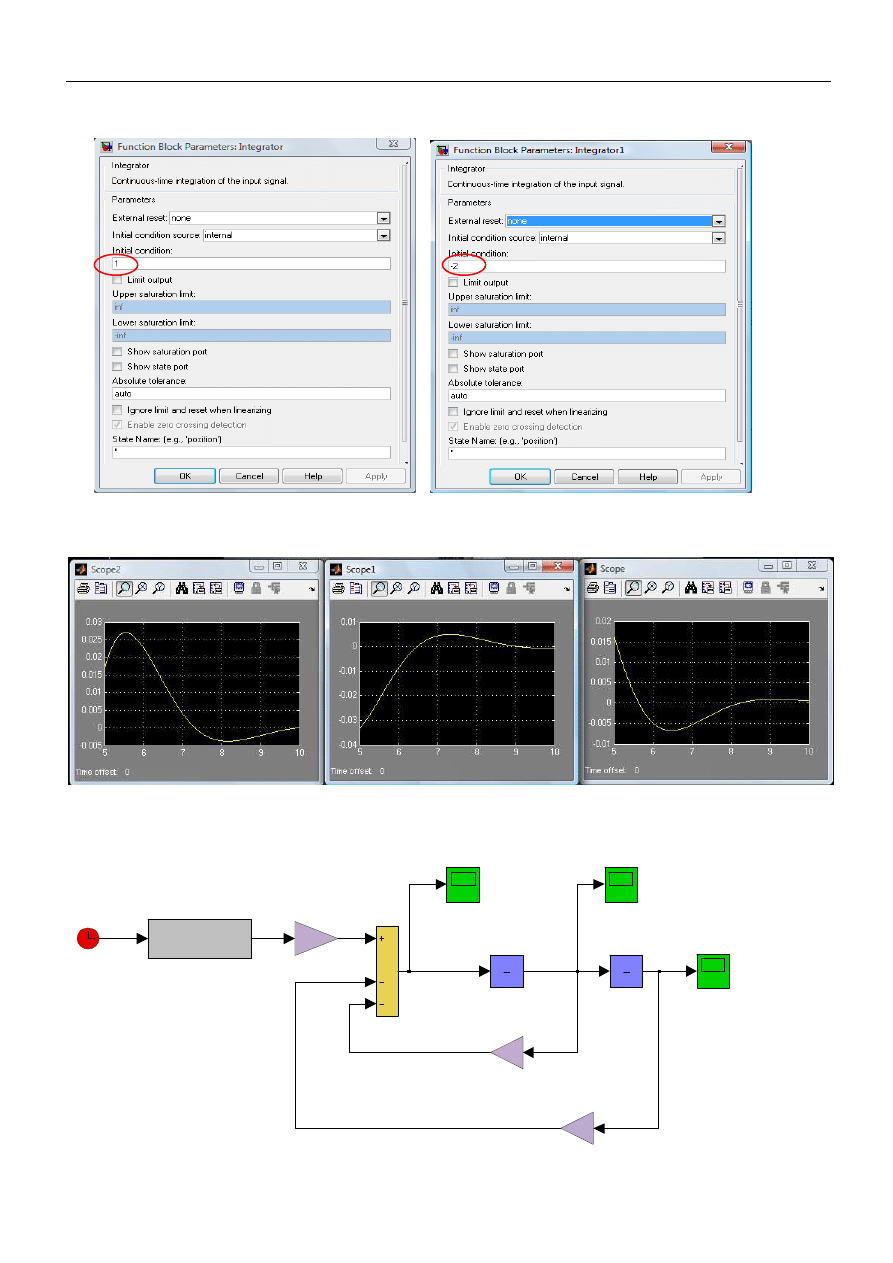
Warunki początkowe
( )
( )
' 0
2
0
1
y
y
= −
=
są ustawiane w integratorach w polu „initial condition”
Przebiegi widoczne na oscyloskopach (po dwukrotnym kliknięciu na dany oscyloskop i wyborze ikony ozn. lornetką)
Schemat można uczynić bardziej przejrzystym edytując teksty oraz wprowadzając odpowiednią kolorystykę
(Menu podręczne: Format, Foreground Color, Bacground Color )
2.5z(t)
y(t)
dy(t)/dt
d2y(t)/dt2
z(t)
sin(u*exp(-2.3*u))
Suma
Scope 2
Scope 1
Scope
1
s
1
s
Clock
2.5
2 y(t)
2
1.5 dy (t)/dt
1.5
Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
Oscyloskopy mona zastąpić blokami To workspace (kategoria Sinks w bibliotece Simulinka) (zapis wyników pomiarów do
przestrzeni roboczej w formacie tablicowym - Array)
2.5z(t)
y(t)
dy(t)/dt
d2y(t)/dt2
z(t)
sin(u*exp(-2.3*u))
t
d2y
dy
y
Suma
1
s
1
s
Clock
2.5
2 y(t)
2
1.5 dy (t)/dt
1.5
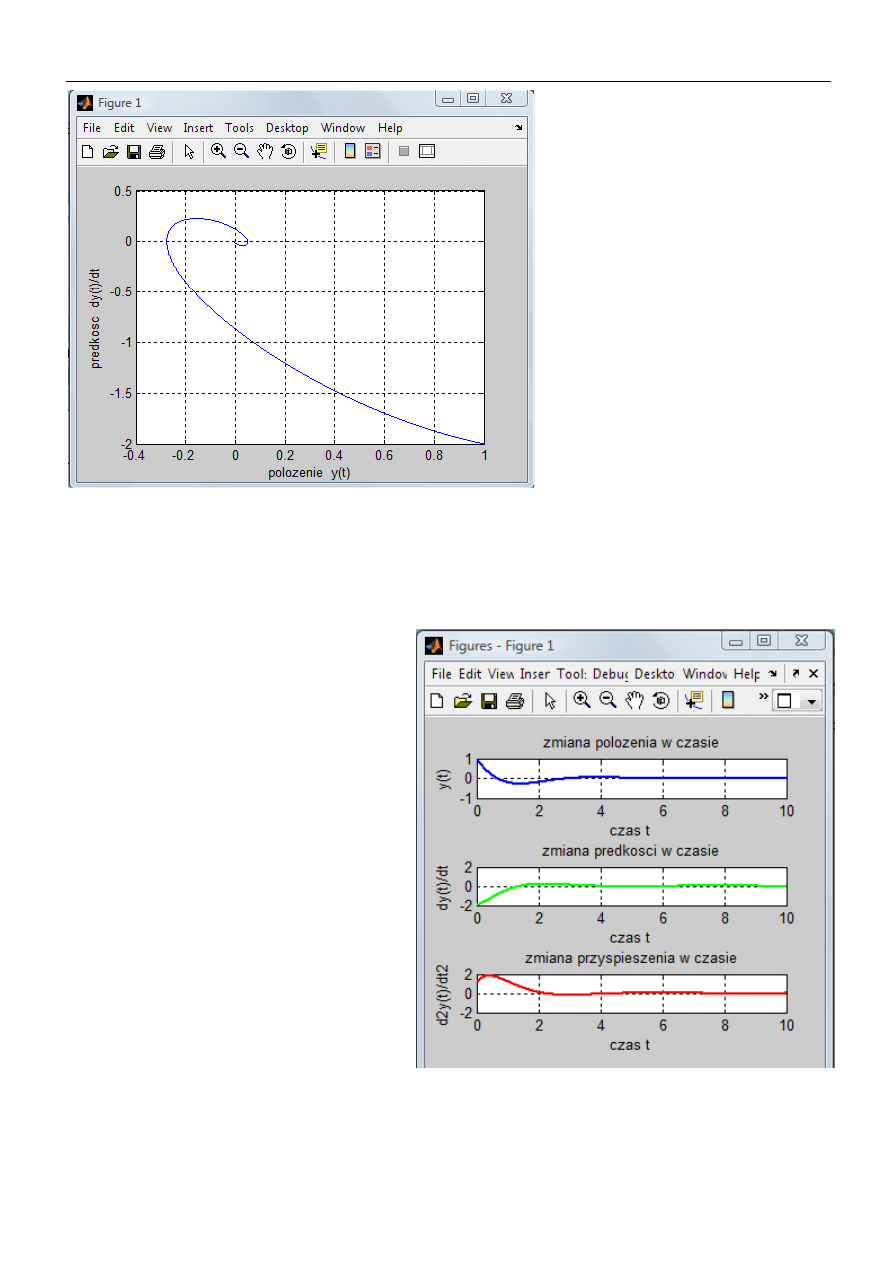
I wówczas na podstawie zgromadzonych danych zilustrować dynamikę obiektu sterowania - położenia, prędkości oraz
przyspieszenia (y(t), dy(t)/dt, d2y(t)/dt2)
Polecenia Matlaba wprowadzane w Command window
>> plot(t,y,’red’,t,dy,’blue’,t,d2y,’green’)
>>grid on
>> title('zmiana polozenia w czasie')
>> xlabel('czas t')
>> ylabel('y(t) dy(t)/dt d2y(t)/dt2')
>> plot(y,dy,'blue')
// tak zwany portret fazowy
>> grid
>> xlabel('polozenie')
>> ylabel('predkosc')
Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
Polecenia Matlaba wprowadzane w Command window
(prezentacja uzyskanych wyników obliczeń w postaci wykresów umieszczonych w jednym oknie w układzie 3x1)
>> subplot(3,1,1)
>> plot(t,y)
>> grid on
>> title('zmiana polozenia w czasie')
>> xlabel('czas t')
>> ylabel('y(t)')
>> subplot(3,1,2)
>> plot(t,dy)
>> grid on
>> title('zmiana predkosci w czasie')
>> xlabel('czas t')
>> ylabel('dy'(t)/dt')
>> subplot(3,1,3)
>> plot(t,d2y)
>> grid on
>> title('zmiana przyspieszenia w czasie')
>> xlabel('czas t')
>> ylabel('d2y(t)/dt2')
Modelowanie i Symulacja Komputerowa
M A T L A B – S i mu l i n k
Ogólnie o tworzeniu podwykresów w jednym oknie wykresu
Polecenie w oknie poleceń Matlab-a
>>subplot(liczba_wierszy, liczba_kolumn, numer pola_wykresu_liczone_od_lewej_do_prawej)
stanowi odwołanie do zadanego pola wykresu w oknie, w którym utworzona została określona liczba okien równa
liczbie_wierszy x liczba_kolumn , np. subplot(2,3,1). Dopiero wówczas poleceniem >>plot(t,y) można wykonać wykres w
tym właśnie oknie
1
2
3
4
5
6
Wyszukiwarka
Podobne podstrony:
MWB 1 Wprowadzenie do modelowania wymagań w bezpieczeństwie
MWB 2 Wprowadzenie do modelowania obiektowego funkcjonowania systemów bezpieczeństwa
MWB 1 Wprowadzenie do modelowania wymagań w bezpieczeństwie
SIZ 2 Wprowadzenie do modelowania obiektowego
Wykład 1 inżynierskie Wprowadzenie do zarządzania operacyjnego
Wprowadzenie do medycyny rozwojowej 1
PD W1 Wprowadzenie do PD(2010 10 02) 1 1
Wprowadzenie do psychologii
Wprowadzenie do filozofii
(1) Wprowadzenie do nauki o finansach 1id 778 ppt
wprowadzenie do systemu win i podst sieci
wprowadzenie do psychologii społecznej
Wprowadzenie do cw1A
1 Wprowadzenie do psychologii pracy (14)id 10045 ppt
Wprowadzenie do Kryptografii
Wprowadzenie do pomocy społecznej
więcej podobnych podstron