AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki cz stotliwo
ciowe liniowych elementów automatyki
3. Charakterystyki cz
stotliwo
ciowe liniowych elementów automatyki
Cel
wiczenia:
Celem
wiczenia jest zapoznanie z cz stotliwo ciowymi metodami opisu własno ci
dynamicznych elementów automatyki.
Wst
p
Charakterystyki cz stotliwo ciowe sporz dza si dla elementu w stanie ustalonym
dynamicznie, czyli wtedy gdy sygnał wej ciowy ma posta :
( )
t
sin
A
t
u
u
ω
=
gdzie:
A
u
- amplituda wej ciowego sygnału okresowo zmiennego;
ω
- cz sto sygnału wej ciowego
[
)
∞
∈
,
0
ω
.
Wtedy sygnał wyj ciowy ma posta :
( )
(
)
ϕ
ω
+
=
t
sin
A
t
y
y
gdzie:
A
y
- amplituda sygnału wyj ciowego;
ϕ
- przesuni cie fazowe sygnału wyj ciowego wzgl dem sygnału wej ciowego.
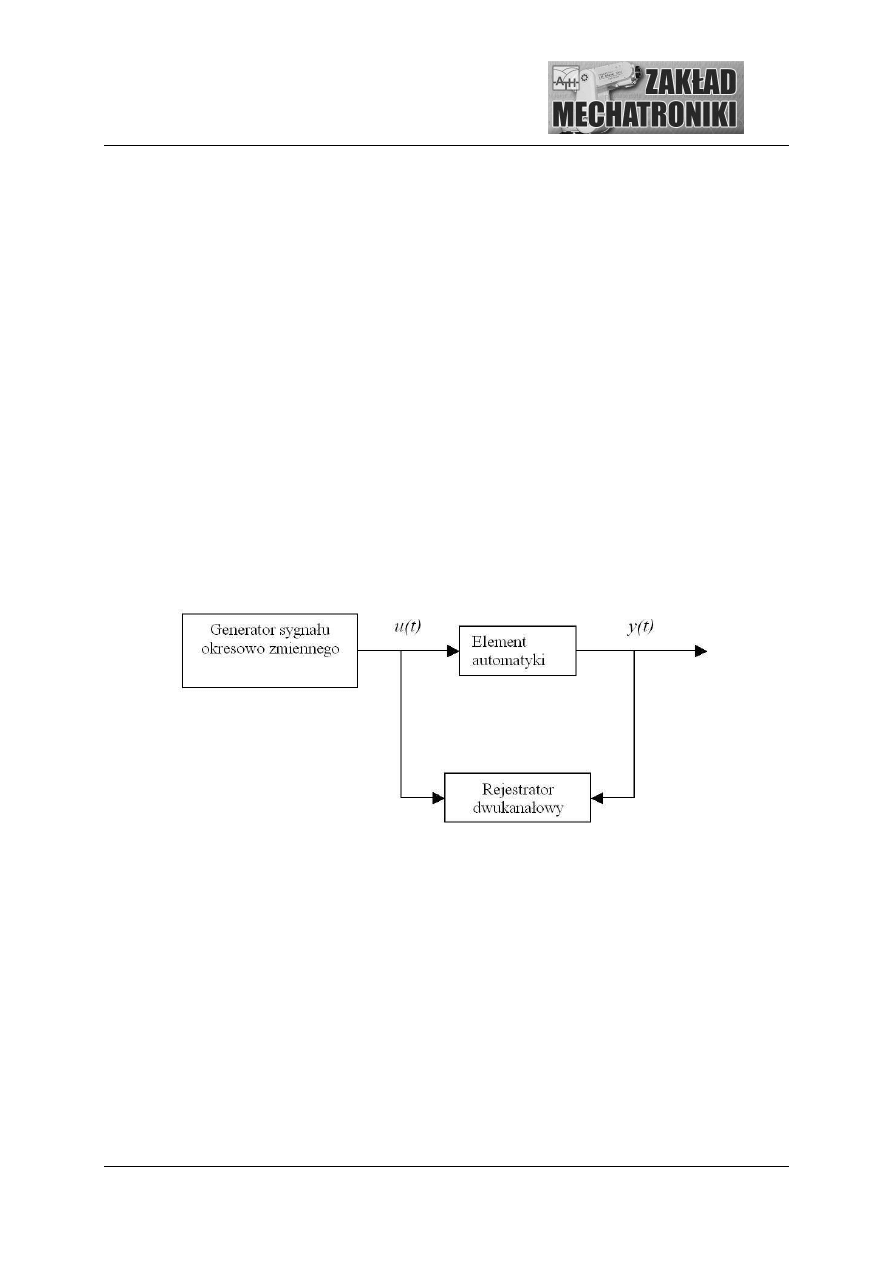
Rys.3.1. Schemat stanowiska pomiarowego do zdejmowania charakterystyk cz stotliwo ciowych
W rejestratorze dwukanałowym (rys.3.6) na jedn o podaje si sygnał wej ciowy a na drug
o sygnał wyj ciowy z elementu automatyki. Dzi ki takiemu podł czeniu na rejestratorze
uzyskamy elips (krzyw Lissajous) [1]. Z zarejestrowanego wykresu (rys. 3.2) odczytujemy
y
1
, A
u
, A
y
.
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki cz stotliwo
ciowe liniowych elementów automatyki
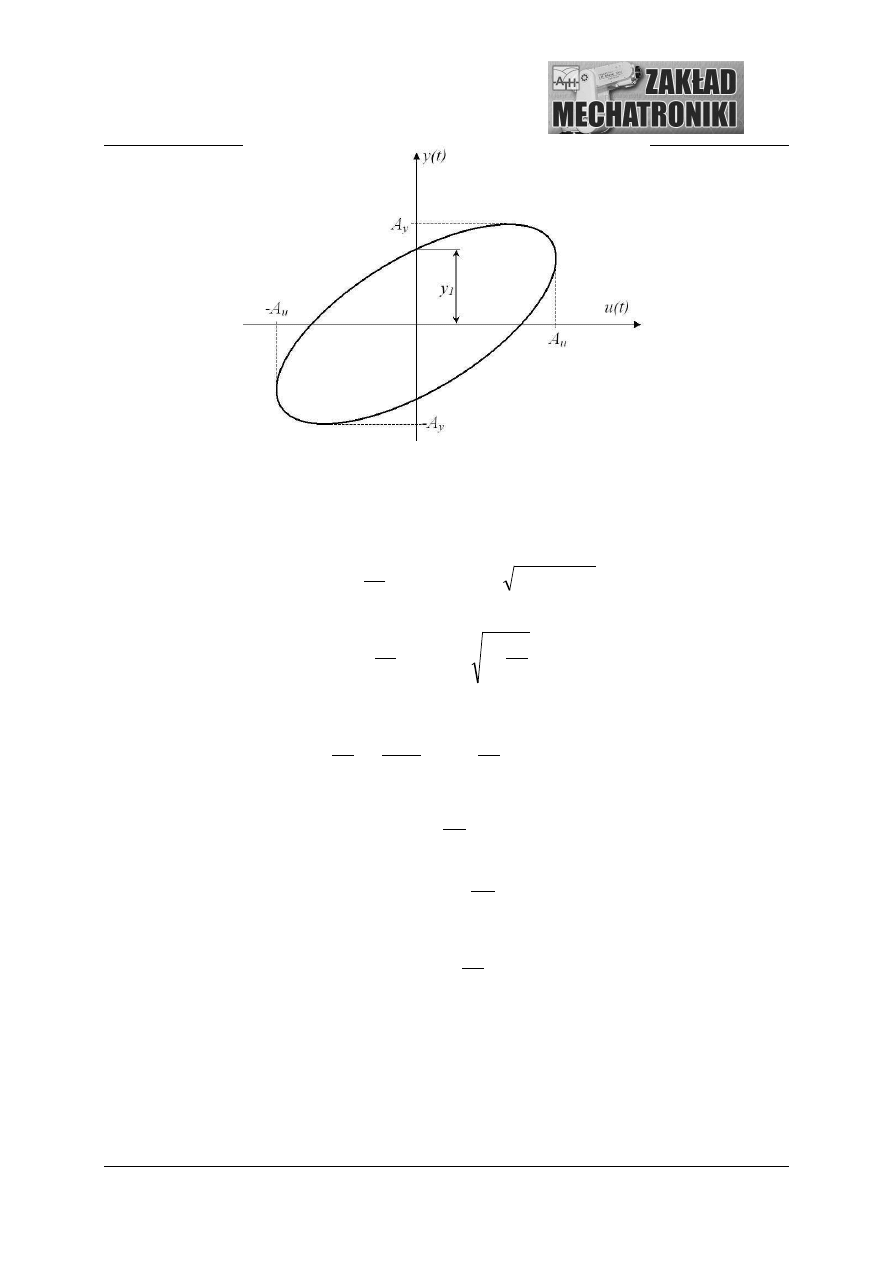
Rys.3.2. Krzywa Lissajous.
Poniewa równanie sygnału wyj ciowego:
(
)
( )
( )
ϕ
ω
ϕ
ω
ϕ
ω
sin
cos
cos
sin
sin
t
A
t
A
t
A
y
y
y
y
+
=
+
=
gdzie:
( )
u
A
u
t
=
ω
sin
oraz
( )
( )
t
t
ω
ω
2
sin
1
cos
−
=
zatem
ϕ
ϕ
sin
1
cos
2
2
u
y
u
y
A
u
A
A
u
A
y
−
+
=
Dziel c powy sze równanie przez A
y
i odpowiednio przekształcaj c uzyskuje si równanie
elipsy w postaci:
ϕ
ϕ
2
2
2
2
2
sin
cos
2
=
+
−
y
y
u
u
A
y
A
A
uy
A
u
Dla
0
=
u
odczytuje si rz dn y
1
i oblicza si warto przesuni cia fazowego
=
=
y
y
A
y
A
y
1
1
arcsin
sin
ϕ
ϕ
Moduł transmitancji widmowej
( )
u
y
A
A
A
=
ω
Na tej podstawie mo na wyznaczy wykresy Bodego (charakterystyk amplitudowo –
cz stotliwo ciow
L(
ω
)
we współrz dnych półlogarytmicznych i fazowo – cz stotliwo ciow
ϕ
(
ω
)
rys.3.3) oraz wykres charakterystyki logarytmicznej amplitudowo – fazowej na
płaszczy nie Black’a
ϕ
(
ω
)
,
L(
ω
),
rys.4
.
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki cz stotliwo
ciowe liniowych elementów automatyki
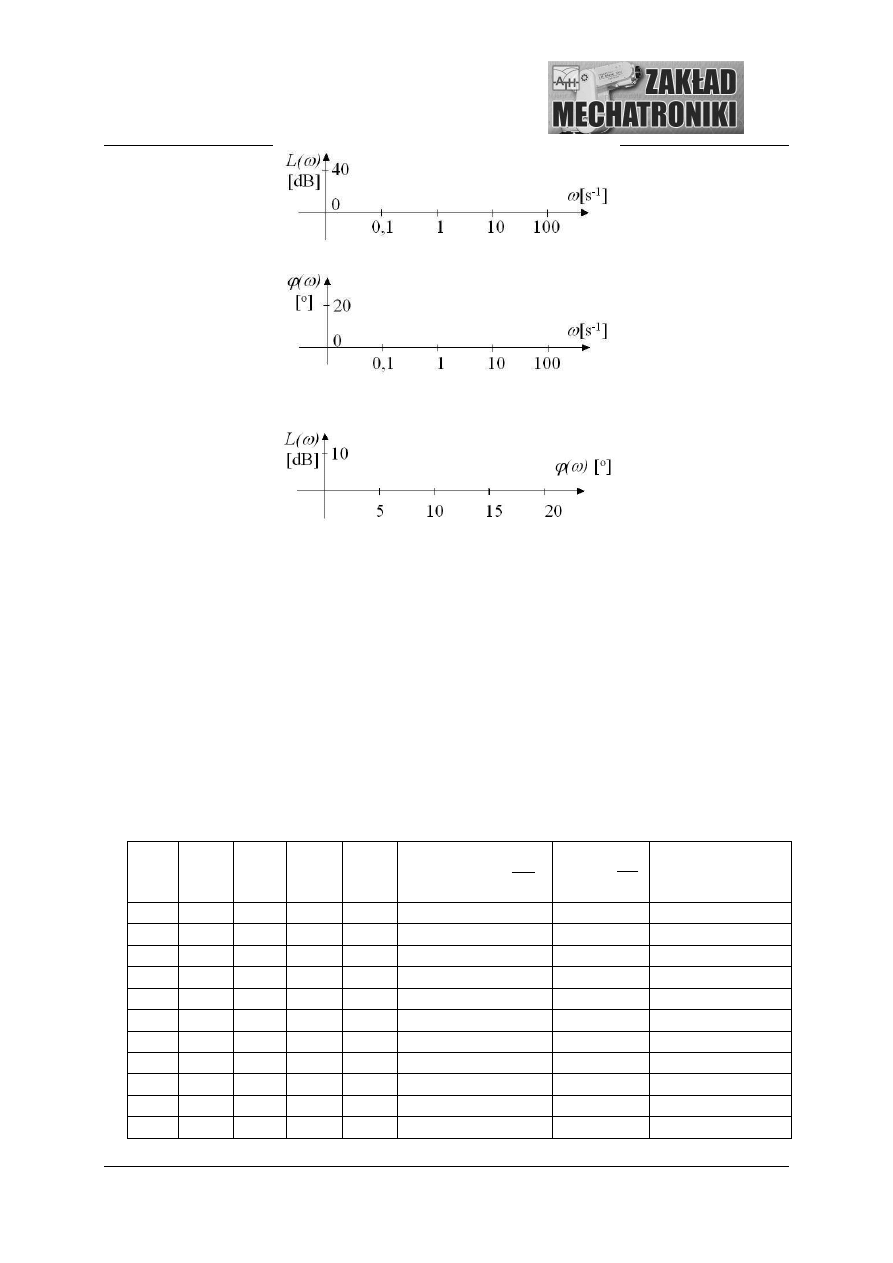
Rys.3.3. Współrz dne wykresów Bodego
Rys.3.4. Płaszczyzna Black’a.
Przebieg
wiczenia:
•
zbudowa czwórnik elektryczny wskazany przez prowadz cego (tab.1.1);
•
poł czy układ pomiarowy jak na rys.3.1;
•
ustawi amplitud wej ciowego sygnału sinusoidalnego
A
u
=1[V];
•
ustawi zakresy pomiarowe rejestratora (rys.3.6) X=Y = 100[mV/cm] dla sygnału
u(t)
i
y(t)
;
•
zarejestrowa krzywe Lissajous dla cz stotliwo ci wymuszenia
f
(0,01; 0,02; 0,05;
0,1; 0,2; 0,5; 1; 2; 5; 10 [Hz]);
•
cz sto kołow
ω
wyznacza si z zale no ci:
f
π
ω
2
=
•
z uzyskanych wykresów odczyta
y
1
, A
u
, A
y
,
wyniki zestawi w tabeli 3.1.
Tab. 3.1.
f
[Hz]
ω
[s
-1
]
y
1
[V]
A
u
[V]
A
y
[V]
( )
=
y
A
y
1
arcsin
ω
ϕ
( )
u
y
A
A
A
=
ω
( )
( )
ω
ω
A
L
lg
20
=
0,001
0,01
0,02
0,05
0,1
0,2
0,5
1
2
5
10
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki cz stotliwo
ciowe liniowych elementów automatyki
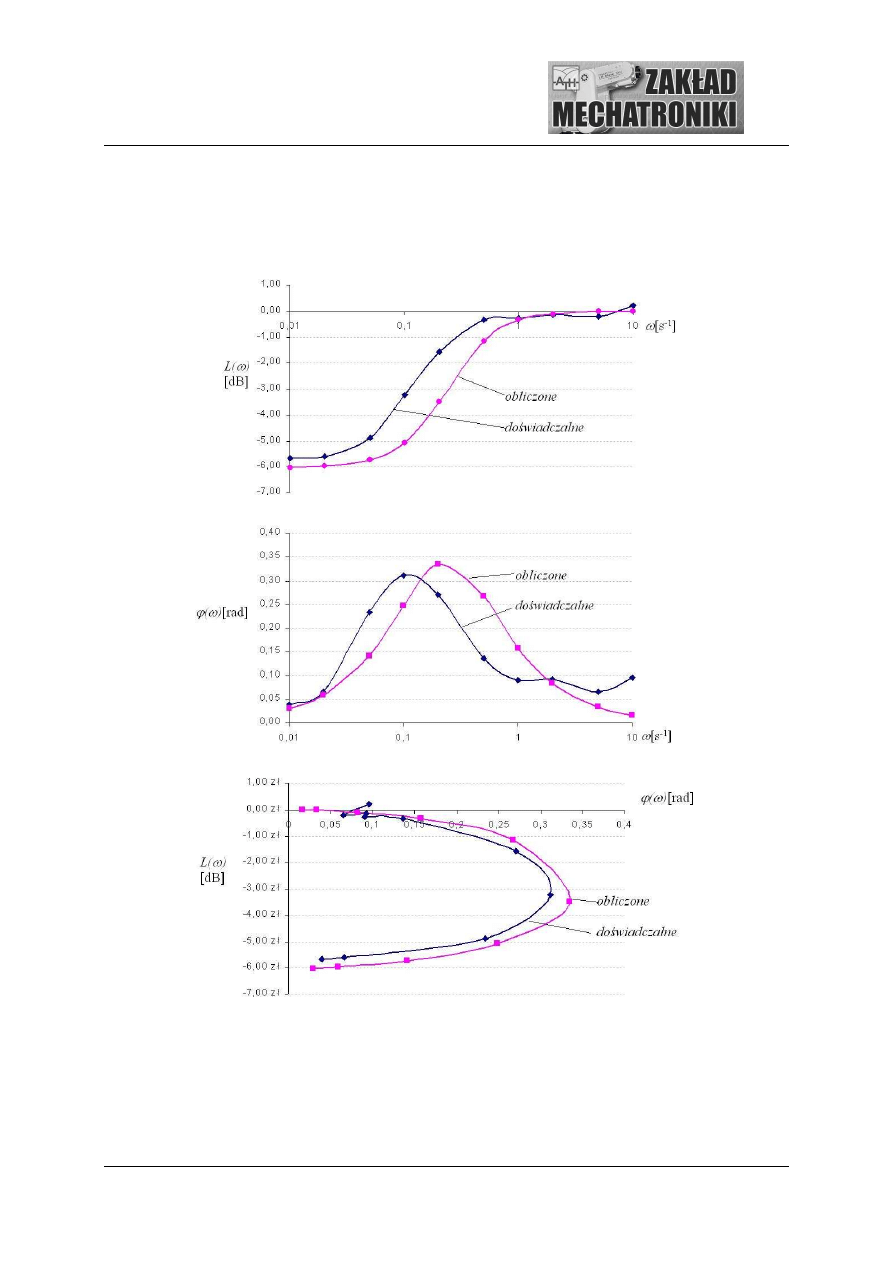
Przykład.
Uzyskane charakterystyki cz stotliwo ciowe dla czwórnika 5.3 z tab. 1.1 przedstawiono na
rys. 3.5.
a)
b)
c)
Rys. 3.5. Charakterystyki cz stotliwo ciowe. a ) amplitudowo-cz stotliwo ciowa, b) fazowo-cz stotliwo ciowa,
c)amplitudowo-fazowa
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki cz stotliwo
ciowe liniowych elementów automatyki
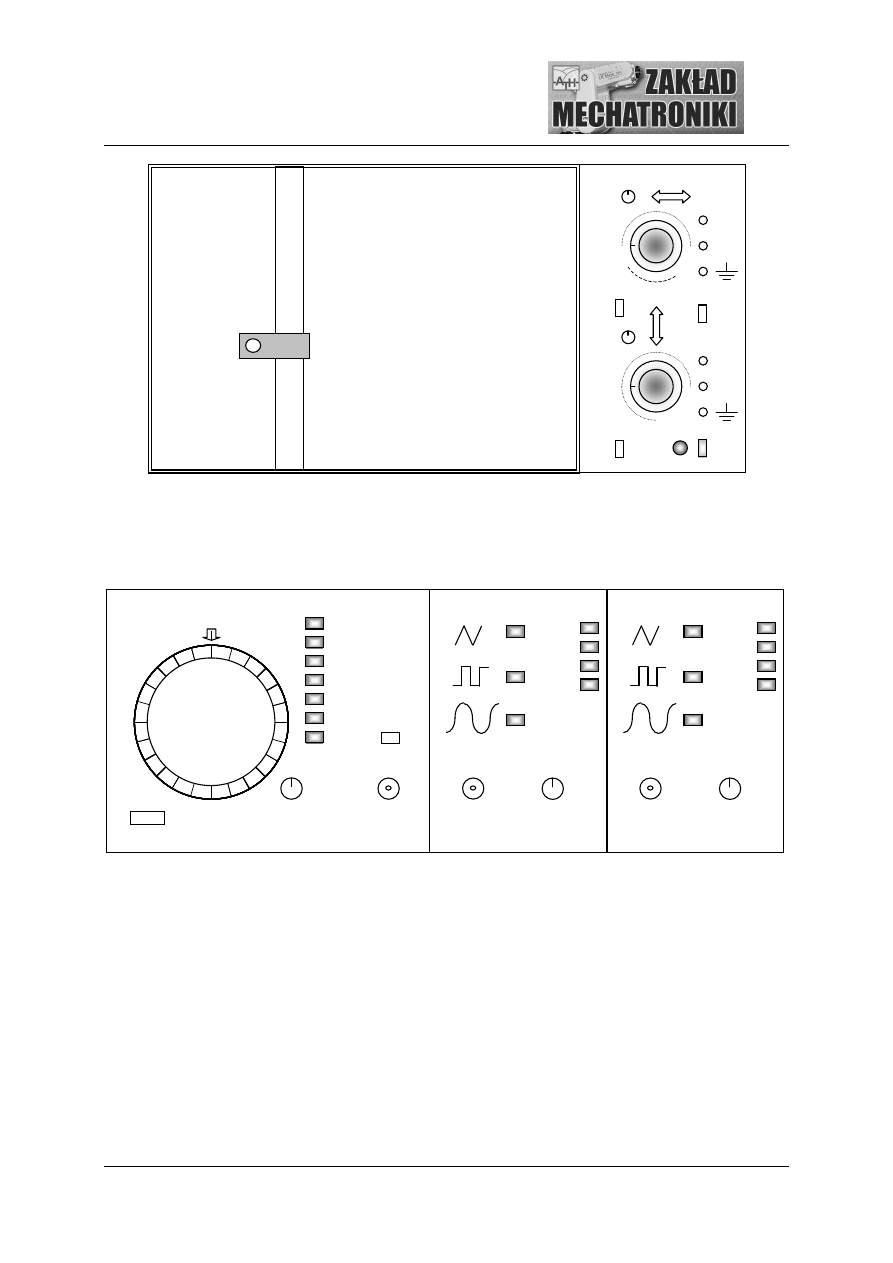
Rys.3.6. Rejestrator dwukanałowy.
Rys.3.7. Generator dwukanałowy.
Uwagi o sprawozdaniu
•
wykona charakterystyki amplitudowo – cz stotliwo ciow i fazowo -
cz stotliwo ciow we współrz dnych półlogarytmicznych (wykresy Bodego);
•
wykona charakterystyk amplitudowo – fazow na płaszczy nie Black’a;
porówna otrzymane na podstawie do wiadczenia charakterystyki z modelowymi.
Literatura
[1]. Dinsdale J., Kłosi ski J.: Podstawy automatyki z elementami mechatroniki. Politechnika Łódzka Filia
w Bielsku-Białej, Bielsko-Biała 1998
X
+
-
Zero
V/cm
s/cm
Y
+
-
Zero
V/cm
Start
VCO
VCO
IN
×
1000
×
100
×
10
×
1
×
0.1
×
0.01
×
0.001
VERNER
FERENQUENCY RANGE
FUNCTION
GENERATOR
POWER
FUNCTION AMPLITUDE
10 V
1 V
0.1 V
0.01 V
OUT CAL
CHANEL A
FUNCTION AMPLITUDE
10 V
1 V
0.1 V
0.01 V
OUT CAL
CHANEL B
AKADEMIA TECHNICZNO-HUMANISTYCZNA
W BIELSKU-BIAŁEJ
KATEDRA PODSTAW BUDOWY MASZYN
Instrukcje laboratoryjne
Charakterystyki cz stotliwo
ciowe liniowych elementów automatyki
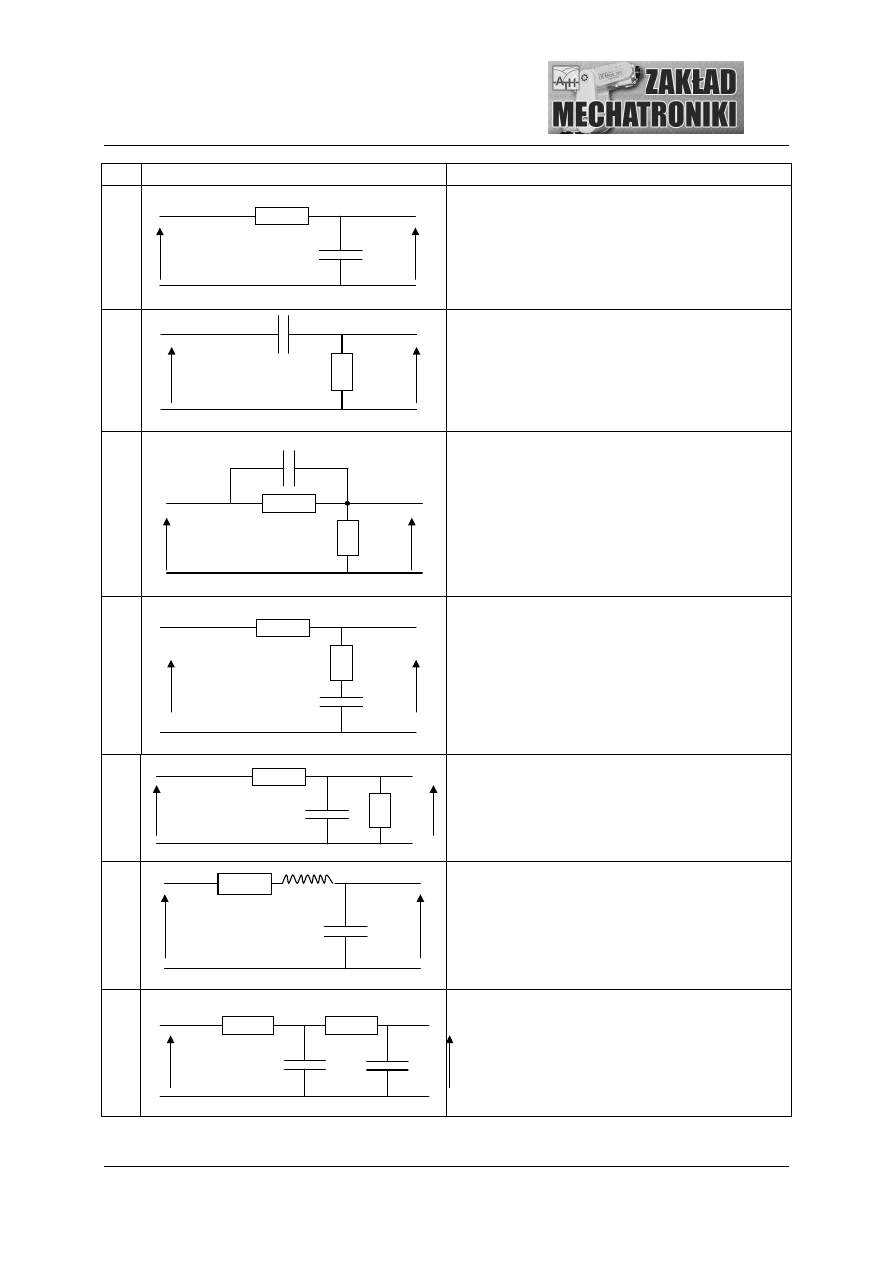
Tab.1.1. Schematy badanych elementów liniowych
Nr
SCHEMAT UKŁADU
WARTO
PARAMETRÓW
1.
1.
R
1
= 1 k
Ω
C=
2200
µ
F
2.
R
1
= 2,5 k
Ω
C=
1470
µ
F
3.
R
1
= 5 k
Ω
C=
1000
µ
F
4.
R
1
= 10 k
Ω
C=
470
µ
F
2.
1.
R
1
= 1 k
Ω
C=
2200
µ
F
2.
R
1
= 2,5 k
Ω
C=
2200
µ
F
3.
R
1
= 5 k
Ω
C=
1000
µ
F
4.
R
1
= 10 k
Ω
C=
1000
µ
F
3.
1.
R
1
=
10 k
Ω
R
2
= 10 k
Ω
C=
1000
µ
F
2.
R
1
= 10 k
Ω
R
2
= 4 k
Ω
C=
2200
µ
F
3.
R
1
= 4 k
Ω
R
2
= 10 k
Ω
C=
2200
µ
F
4.
R
1
= 4 k
Ω
R
2
= 1 k
Ω
C=
4400
µ
F
5.
1.
R
1
=
10 k
Ω
R
2
= 10 k
Ω
C=
1000
µ
F
2.
R
1
= 10 k
Ω
R
2
= 4 k
Ω
C=
2200
µ
F
3.
R
1
= 4 k
Ω
R
2
= 10 k
Ω
C=
2200
µ
F
4.
R
1
= 4 k
Ω
R
2
= 10 k
Ω
C=
1000
µ
F
6.
1.
R
1
= 1 k
Ω
R
2
= 10 k
Ω
C=
2200
µ
F
2.
R
1
= 1 k
Ω
R
2
= 20 k
Ω
C=
2200
µ
F
3.
R
1
= 5 k
Ω
R
2
= 100 k
Ω
C=
2200
µ
F
7.
1.
R
1
=
0
Ω
C=
4400
µ
F
2.
R
1
= 10
Ω
- || -
3.
R
1
= 30
Ω
- || -
4.
R
1
= 50
Ω
- || -
5.
R
1
= 100
Ω
- || -
8.
1.
R
1
=
R
2
= 10 k
Ω
C
1
= C
2
=
1000
µ
F
2.
R
1
= 1 k
Ω
R
2
= 10 k
Ω
C
1
= C
2
=
2200
µ
F
3.
R
1
=
R
2
= 10 k
Ω
C
1
=
470
µ
F
C
1
=
2200
µ
F
R
1
C
U
Y
C
R
1
U
Y
R
1
R
2
C
U
Y
R
1
R
2
C
U
Y
R
1
C
R
2
U
Y
R
1
L
C
U
Y
R
1
C
1
R
2
C
2
U
Y
Wyszukiwarka
Podobne podstrony:
Charakterystyki czestotliwo ciowe wybranych elementow liniowych
Charakterystyki skokowe wybranych elementow liniowych
2. Charakterystyki statyczne wybranych elementów liniowych, Rok II, Semestr 4, P. T. S. i S
1. Charakterystyki statyczne wybranych elementów liniowych, ATH, Wejściówki, PTSiS
Charakterystyki skokowe wybranych elementow liniowych
Charakterystyki skokowe wybranych elementow liniowych
4. Charakterystyki częstotliwościowe liniowych elementów elektrycznych, Rok II, Semestr 4, P. T. S.
3 Charakterystyki częstotliwościowe liniowych elementów elektrycznych
Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar charakterystyk stałoprądowych (3)
Sprawozdanie 1 Wyznaczenie charakterystyk skokowych i impulsowych dla zadanych elementów liniowych w
Charakterystyka dynamiczna wybranego elementu ukladu sterowania, Inż + seminarium
Elementy liniowe i nieliniowe obwodów elektrycznych , pomiar charakterystyk stałoprądowychx
L3 Badanie charakterystyk częstotliwościowych liniowych układów ciągłych N
Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar charakterystyk stałasdfaoprądowych
(),elektronika i elektrotechnika L, Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar char
Ćwiczenie 6 Charakterystyki częstotliwościowe elementów automatyki
07 Badanie charakterystyk częstotliwościowych i przebiegów nieustalonych podstawowych elementów auto
elektronika i elektrotechnika, Elementy liniowe i nieliniowe obwodów elektrycznych, pomiar charakter
więcej podobnych podstron