1. Cel ćwiczenia.
Celem ćwiczenia jest:
zapoznanie się z opisem ruchu oscylatorów sprzężonych,
określenie związku między parametrami charakteryzującymi układ oscylatorów sprzężonych z parametrami oscylatora harmonicznego,
wyznaczenie częstości własnych, częstości dudnień i współczynnika sprzężenia.
2. Wstęp teoretyczny.
Punkt materialny, na który działa siła proporcjonalna do jego wychylenia z położenia równowagi i przeciwnie skierowana, jest oscylatorem harmonicznym, a jego ruch - ruchem harmonicznym. Dlatego też zgodnie z drugą zasadą dynamiki Newtona, równanie ruchu takiego oscylatora wyraża się równaniem:
,
gdzie
m - masa oscylatora,
x - wychylenie z położenia równowagi,
k - współczynnik proporcjonalności (wsp. sprężystości).
Równanie powyższe można zapisać w postaci:
,
przyjmując za,
gdzie
ω0 - częstość (kołowa) własna oscylatora harmonicznego.
Jeżeli dwa identyczne oscylatory harmoniczne zostaną połączone (sprzężone) w taki sposób, że dodatkowa siła (wynikająca z połączenia) jest proporcjonalna do różnicy wzajemnych wychyleń pojedynczych oscylatorów, to - zgodnie z drugą zasadą dynamiki Newtona - równanie ruchu tych oscylatorów przyjmuje postać:
(**)
Równanie to można uogólnić na większą liczbę oscylatorów harmonicznych o różnych częstościach własnych, przy czym:
xi - wychylenie i-tego oscylatora z położenia równowagi,
kS - współczynnik proporcjonalności (współczynnik sprzężenia).
Wówczas rozwiązania równań poszukujemy w postaci:
Po podstawieniu otrzymujemy:
czyli po przekształceniu:
(*)
Powyższy układ równań ma rozwiązanie ze względu na A1 i A2 , jeśli wyznacznik tego układu jest równy zeru. Zerowanie się wyznacznika prowadzi do równania:
Z powyższego równania otrzymujemy wyrażenie określające częstości (kołowe) własne oscylatorów sprzężonych:
czyli
lub
Wstawiając ωI do jednego z równań układu równań (*) otrzymujemy:
czyli kSA1= kSA2 , stąd ostatecznie A1=A2 .
Analogicznie wstawiając ωII do jednego z równań układu równań (*) otrzymujemy po uproszczeniu . Obydwa oscylatory sprzężone drgają więc z częstością kołową ωI , jeżeli ich fazy są zgodne lub z częstością ωII , jeżeli ich fazy są przeciwne.
Jeżeli oscylatorami będą wahadła fizyczne, to
gdzie
D - moment kierujący,
I - moment bezwładności wahadła.
Miarę wychylenia wahadła z położenia równowagi oznaczymy ϕi . Sytuacje odpowiadające częstościom kołowym własnym ω1 i ω2 są przedstawione na rysunkach. Jeżeli jedno z wahadeł sprzężonych (np. drugi) unieruchomimy ϕ2=0, a pierwsze pobudzimy do drgań, to równanie oscylatora harmonicznego przyjmie postać:
i drgania odbywać się będą z częstością kołową:
Rozwiązanie równań ruchu dla innych warunków początkowych, np. dla:
można otrzymać wprowadzając nowe zmienne:
Dodając równania (**) stronami i wykorzystując pierwsze równanie otrzymujemy:
Analogicznie z równania drugiego otrzymujemy:
Rozwiązania powyższych równań przy warunkach początkowych mają postać:
tak więc:
Każdy z oscylatorów sprzężonych wykonuje w tym przypadku drgania z częstotliwością kołową
zaś amplituda zeruje się z częstością
gdzie
W omawianym przypadku drgania są więc dudnieniami otrzymanymi przez nałożenie się dwóch drgań własnych o częstościach kołowych ωI i ωII
4. Przebieg ćwiczenia.
4.1. Spis przyrządów:
stoper
układ wahadeł sprzężonych
4.2.Przebieg pomiarów:
Pomiary wykonujemy dla trzech różnych sprzężeń (trzy różne zawieszenia sprężyny).
4.2.1. Wyznaczenie okresu wahań odpowiadającego częstości własnej ω1 (zgodne fazy początkowe ϕ1=ϕ2).
sprzężenie |
ilość okresów n |
czas zmierzony t [s] |
okres T [s] |
częstość ω1 [1/s] |
δω1 [%] |
1 |
50 |
67,61 |
1,352 |
4,647 |
0,015 |
2 |
50 |
67,58 |
1,352 |
4,649 |
0,015 |
3 |
50 |
67,69 |
1,354 |
4,641 |
0,015 |
4.2.2. Wyznaczenie okresu wahań odp. częstości ω2 (przeciwne fazy początkowe ϕ1 = -ϕ2).
sprzężenie |
ilość okresów n |
czas zmierzony t [s] |
okres T [s] |
częstość ω2 [1/s] |
δω2 [%] |
1 |
50 |
66,57 |
1,331 |
4,719 |
0,016 |
2 |
50 |
65,40 |
1,308 |
4,804 |
0,016 |
3 |
50 |
64,54 |
1,291 |
4,868 |
0,016 |
4.2.3. Wyznaczenie częstości dudnień ωd (różne fazy początkowe ϕ1 = -20o, ϕ2 = 0o).
Początkowo wahadło 1 wykonywało drgania o maksymalnej amplitudzie, a wahadło 2 pozostawało w spoczynku. Stopniowo ruch wahadła 1 zaczął zanikać, natomiast wahadło 2 zwiększało amplitudę swoich drgań. Analogiczna sytuacja powtórzyła się teraz dla wahadła 2. Drgania powoli zanikały aż do zatrzymania się wahadła. W tym momencie układ 2 wahadeł wykonał 1 pełny okres dudnień, który został zmierzony.
sprzężenie |
ilość okresów n |
czas zmierzony t [s] |
okres T [s] |
częstość ωd [1/s] |
δωd [%] |
1 |
1 |
96,50 |
96,50 |
0,065 |
0,011 |
2 |
1 |
38,47 |
38,47 |
0,163 |
0,026 |
3 |
1 |
25,81 |
25,81 |
0,243 |
0,039 |
4.2.4. Częstość dudnień:
W poniższej tabeli znajduje się zestawienie wyliczonej częstości dudnień oraz zmierzonej w celu porównania różnic.
sprzężenie |
ω1 [1/s] |
ω2 [1/s] |
ωd = ω2 - ω1 [1/s] |
ωd zmierzone [1/s] |
1 |
4,647 |
4,719 |
0,072 |
0,065 |
2 |
4,649 |
4,804 |
0,155 |
0,163 |
3 |
4,641 |
4,868 |
0,227 |
0,243 |
4.2.5. Moment kierujący i sprzęgający
Moment kierujący:
Moment sprzęgający:
Po podstawieniu do wzoru na moment sprzęgający wzoru na moment kierujący i odpowiednim uproszczeniu otrzymamy następujące wyrażenie:
gdzie
I - moment bezwładności,
I = 0,2334 kg⋅m2 ,
.
Błąd wyznaczenia momentu sprzęgającego:
δDS= δω1 + δωd +δI.
4.3.1 Przykładowe wyliczenia
D1 =0,2334⋅(4,647)2 =5,0402 [Nm]
D2 =0,2334⋅(4,649)2 =5,0445 [Nm]
D3 =0,2334⋅(4,641)2 =5,0272 [Nm]
DS1 =4,647 ⋅ 0,065 ⋅ 0,2334=0,0705 [Nm]
DS2 =4,649 ⋅ 0,163⋅0,2334=0,1769 [Nm]
DS3 =4,641 ⋅ 0,243⋅0,2334=0,2632 [Nm]
4.3.2. Tabela momentów kierujących i sprzęgających
sprzężenie |
moment kierujący D [Nm] |
moment sprzęgający DS [Nm] |
1 |
5,0402 |
0,0705 |
2 |
5,0445 |
0,1769 |
3 |
5,0272 |
0,2632 |
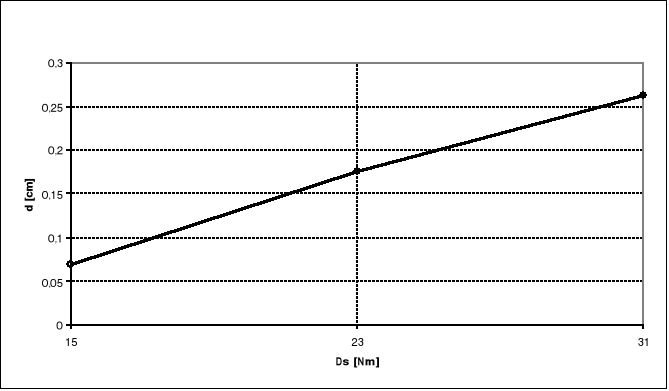
5. Wykres zależności momentu sprzęgającego od odległości punktu zawieszenia sprężyny.
d [cm] |
DS [Nm] |
δ DS [%] |
15 |
0,0705 |
0,526 |
23 |
0,1769 |
0,541 |
31 |
0,2632 |
0,554 |
d - odległość punktu zawieszenia sprężyny (sprzężenia) od punktu zawieszenia wahadła
Wykres zależności momentu sprzęgającego od odległości punktu zawieszenia sprężyny
6. Błędy pomiarów.
Na błędy pomiarów złożyły się następujące błędy:
Przede wszystkim bardzo znaczący błąd wynikający z czasu reakcji mierzącego - jest on dość znaczny, ale praktycznie niemożliwy do wyliczenia,
Błąd pomiaru czasu stoperem - jest to błąd dyskretyzacji pomiaru czasu wynikający z cyfrowego charakteru pomiaru czasu,
Błąd wyznaczenia momentu bezwładności wahadła - podany w instrukcji stanowiska ćwiczenia:
,
Błąd zaokrąglenia liczby π - pomijalnie mały, gdyż liczba π była wyliczona przez kalkulator z dokładnością do dziewięciu miejsc po przecinku,
Błąd wyznaczenia kąta wychylenia wahadła - nie istotny, gdyż częstość drgań wahadła nie zależy od początkowego kąta wychylenia.
7. Wnioski:
Jak pokazało ćwiczenie istnieje pewna niewielka różnica pomiędzy częstością dudnień zmierzoną a wyliczoną ze znajomości ω1 i ω2 . Związane jest to z błędami jakimi obarczone są wyniki pomiarów. Istotny tu wpływ miał przede wszystkim czas reakcji mierzącego, który musiał w odpowiedniej chwili zastartować i zatrzymać stoper. Jednak błąd ten jest niemożliwy do wyliczenia. Wyeliminowanie, a napewno znaczne zmniejszenie tego błędu mogłoby być zrealizowane za pomocą jakiegoś mechanizmu (np. fotokomórka lub inne czujniki) automatycznie startującego i zatrzymującego stoper.
Celem tego ćwiczenia było poznanie zjawiska dudnień. Sama nazwa „dudnienia” wzięła się prawdopodobnie stąd, iż zjawisko to zachodzi również dla fal dźwiękowych. W przypadku dźwięku zmiany amplitudy przejawiają się jako zmiany głośności. Dobrym przykładem jest równoczesne uderzenie w dwa sąsiednie klawisze fortepianu. Zjawisko to można wykorzystać do nastrojenia dwóch strun na tę samoą częstotliwość metodą naciągania jednej z nich w czasie brzmienia obu, aż do momentu, gdy dudnienia znikną. Ucho ludzkie może rejestrować tylko takie dudnienia między dwoma tonami, których częstość sięga około siedmiu na sekundę. Dudnienia o częstościach wyższych nie są w odbieranym dźwięku rozróżnialne.
Jeżeli ω1 i ω2 są prawie równe, amplituda zmienia się powoli. Zjawisko to ma charakter modulacji amplitudy, której zastosowanie mamy w odbiornikach radiowych typu AM (z ang. amplitude modulation).
Wykres zależności momentu sprzęgającego od punktu zawieszenia sprężyny (sprzężenia) sporządzony w trakcie ćwiczenia pozwala przypuszczać, iż charakterystyka ta jest liniowa.
Wyszukiwarka
Podobne podstrony:
LAB1, Fizyka laborki, Fizyka (laby i inne), FizLab, fizlab, 001 WA~1
25OPR, Fizyka laborki, Fizyka (laby i inne), FizLab, fizlab, 025 IN~1
FIZLAB, SPRAW C4, sprawozdaie
FIZLAB, J B 6, absorbcja i fluorescencja
FIZLAB, J B 1
FIZLAB, J B 7, B-7
FIZLAB, SPRAW E1, Tabela do sprawozdań
FIZLAB, SPR B12, Tabela do sprawozdań
FIZLAB, SPRW A27
FIZLAB, J E 1, promieniowanie termiczne
FIZLAB16, ˙wiczenie nr 16
FIZLAB60
FIZLAB, SPRA 26, Sprawozdanie z ćwiczenia A-26
FIZLAB, SPRW A23, Tabela do sprawozdań
FIZLAB, SPRA 26, Sprawozdanie z ćwiczenia A-26
FIZLAB, SPRW A23, Tabela do sprawozdań
FIZLAB74
Wyznaczanie rozmiarów szczelin i przeszkód za pomocą światła laserowego, FIZLAB25, LABORATORIUM
Informacje Ogolne - fizlab biotechnologia 2008, biofizyka, Fizyka i Biofizyka
więcej podobnych podstron