
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
1
SPIS TREŚCI
1. Metody przybliżone w mechanice konstrukcji
2
2. Metoda Różnic Skończonych
9
3. Metoda Elementów Brzegowych
17
3.1
MEB dla równania Poissona
17
3.2
Zagadnienia teorii sprężystości (poza programem)
21
4. Koncepcja MES na przykładzie równania Poissona
35
5. MES w analizie konstrukcji prętowych
38
5.1.Belki
38
5.2. Pręty rozciągane i skręcane. Sprężyny
52
5.3. Kratownice i ramy płaskie
59
5.4. Przestrzenne kratownice i ramy
63
6. Dwuwymiarowe i trójwymiarowe zadania teorii sprężystości
66
6.1. Element skończony trójkątny CST (constant strain triangle)
77
6.2. Izoparametryczny 8-węzłowy element skończony
84
6. 3. Całkowanie numeryczne
89
7. MES w praktyce inżynierskiej
91
7.1.Uwagi o dokładności obliczeń MES ...
91
7.2. Wykorzystanie profesjonalnych systemów obliczeniowych .....
96
Literatura
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
2
1. METODY PRZYBLIŻONE W MECHANICE
KONSTRUKCJI
Konstrukcje odkształcalne mogą być badane doświadczalnie lub metodami
teoretycznymi; analitycznymi i numerycznymi. Poważną wadą analiz eksperymentalnych jest
ich koszt i czasochłonność. Dotyczy to zarówno większości badań modelowych jak i badań
obiektów rzeczywistych. Pracochłonność metod doświadczalnych jest szczególnie odczuwana
w trakcie prac projektowych, gdzie analizie poddawane są różne warianty konstrukcji.
Dlatego rozwój metod teoretycznych, przede wszystkim metod numerycznych, wpływał
zawsze na jakość projektowanych konstrukcji inżynierskich. Przykładem może być postęp w
konstrukcjach statków, dźwigów, wysokich budynków, samochodów, samolotów.
Badania teoretyczne polegają na sformułowaniu odpowiedniego opisu matematycznego i
następnie rozwiązaniu postawionego problemu. Niestety, dla bardzo wielu praktycznych
problemów mechaniki konstrukcji można zbudować wiarygodny model matematyczny, ale
nie są znane odpowiednie ścisłe rozwiązania analityczne. Prostym przykładem takich
zagadnień jest wyznaczanie współczynników koncentracji naprężeń. Tylko w bardzo
szczególnych przypadkach znane są rozwiązania dokładne.
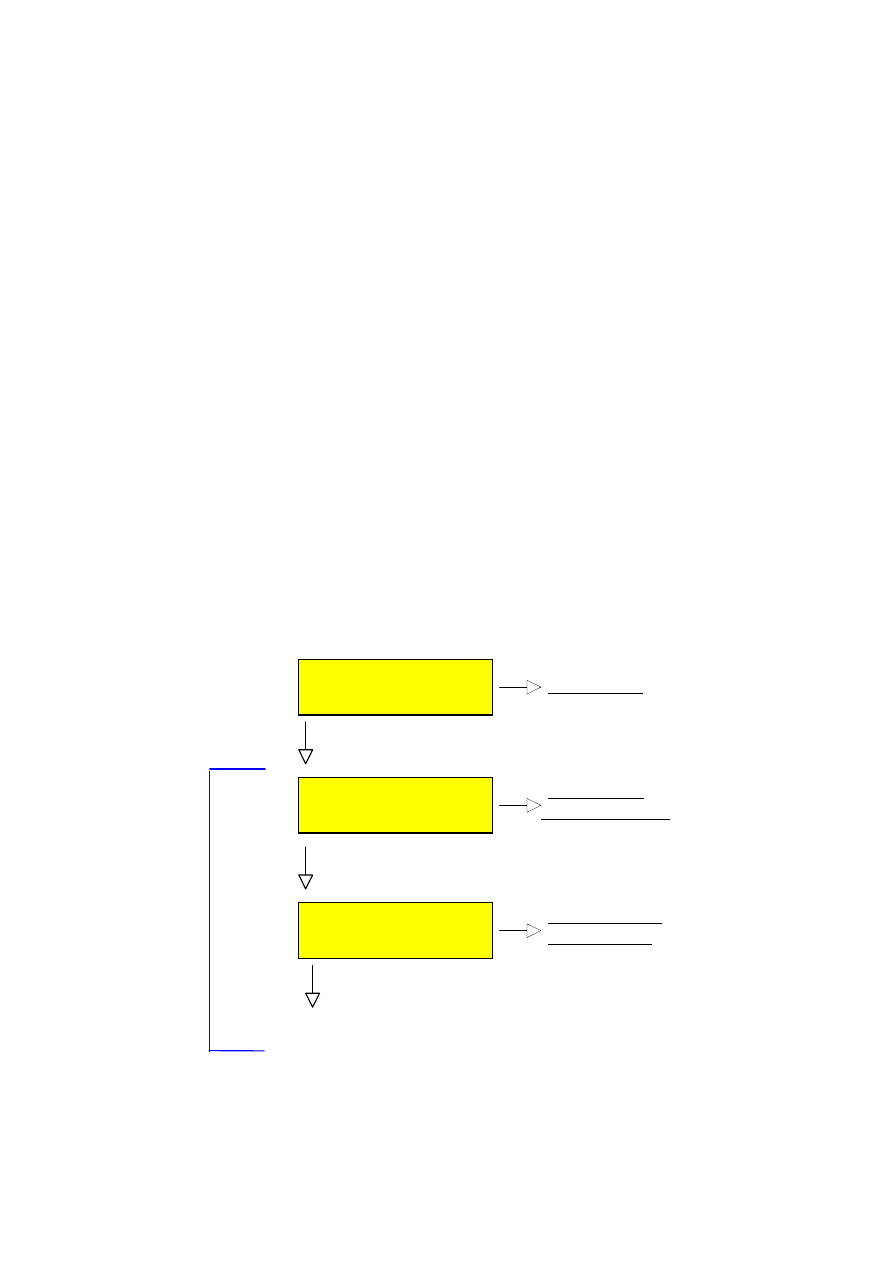
Rzeczywiste zjawisko
Model matematyczny
ci
ą
gły
Model
dyskretny
Rzeczywisty wynik
Rozwi
ą
zanie
ś
cisłe
modelu matematycznego
Rozwi
ą
zanie dokładne
modelu dyskretnego
Prawa fizyki
Własno
ś
ci materiałowe, geometria,
Dyskretyzacja
Aproksymacja
Realizacja oblicze
ń
Wynik numeryczny
Warunki brzegowe
M
E
T
O
D
A
P
R
Z
Y
B
L
I
Ż
O
N
A
Rys. 1. Rozwiązywanie zagadnień analizy ośrodków ciągłych metodami przybliżonymi.
Schemat postępowania
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
3
Dlatego równolegle do rozwoju analitycznych metod znajdowania rozwiązań ścisłych
były opracowywane i doskonalone metody przybliżone. Większość zadań analizy
wytrzymałościowej konstrukcji rozwiązuje się współcześnie za pomocą metod przybliżonych,
przy wykorzystaniu obliczeń komputerowych.
Ogólny schemat postępowania przy zastosowaniu metod przybliżonych przedstawiony jest na
rysunku 1.
Pierwszym krokiem na drodze poszukiwania rozwiązania jest budowa modelu
matematycznego. Potrzebna jest do tego znajomość odpowiednich praw fizyki,
sformalizowany opis własności materiałowych, kształtu konstrukcji, jej warunków podparcia i
obciążenia. Dla każdego rzeczywistego problemu możemy zbudować wiele różnych modeli
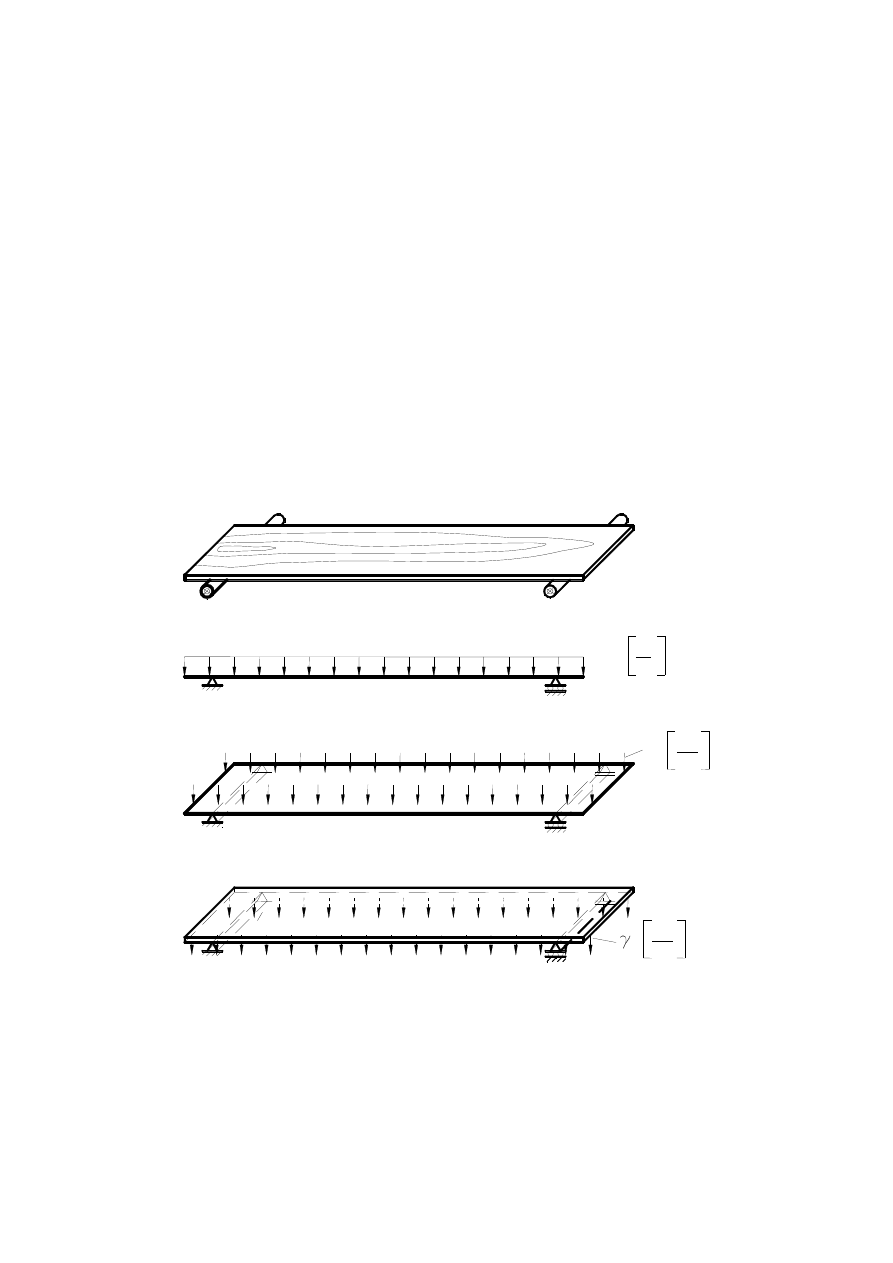
matematycznych. Bardzo prostą ilustracją może być tu zadanie określenia ugięcia pod
wpływem sił ciężkości swobodnie podpartej drewnianej deski (rys. 2).
a) model belki
b) model płyty
c) model trójwymiarowy bryły
q
0
N
m
p
0
m
N
2
N
m
0
3
Rys. 2. Różne modele w analizie wytrzymałościowej zginanej deski
Dla takiego zagadnienia można przedstawić typowy jednowymiarowy model
matematyczny
belki,
dwuwymiarowy
model
zginanej
płyty
lub
pełny
model
trójwymiarowego zadania mechaniki ciał odkształcalnych. Własności materiału i równania
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
4
opisujące konstrukcję mogą w najprostszym przypadku zakładać izotropową liniową
sprężystość. Mogą również uwzględniać anizotropię, lepkosprężystość czy duże ugięcia i w
konsekwencji nieliniowość zjawisk. Również warunki brzegowe można przyjąć w postaci
uproszczonej lub uwzględnić na przykład zjawiska kontaktowe. Przykład ten pokazuje, że
zwykle nie ma jednego, najlepszego modelu obliczeniowego dla analizy wytrzymałości
elementów konstrukcyjnych. Właściwy model obliczeniowy zależy od celu analizy, wymagań
stawianych konstrukcji, żądanej dokładności wyników, dostępności danych materiałowych,
ale także - w dużym stopniu - od dostępnych narzędzi obliczeniowych.
Ponadto opis matematyczny wybranego modelu można przedstawić w różnych
sformułowaniach, na przykład równań różniczkowych, odpowiadających im równań
całkowych lub w ujęciu wariacyjnym, w postaci problemu minimalizacji odpowiedniego
funkcjonału [5]. Budowa modelu matematycznego stanowi najważniejszy element analizy
obliczeniowej, w którym bardzo trudno zastąpić bezpośrednią decyzję człowieka przez
sformalizowane algorytmy postępowania.
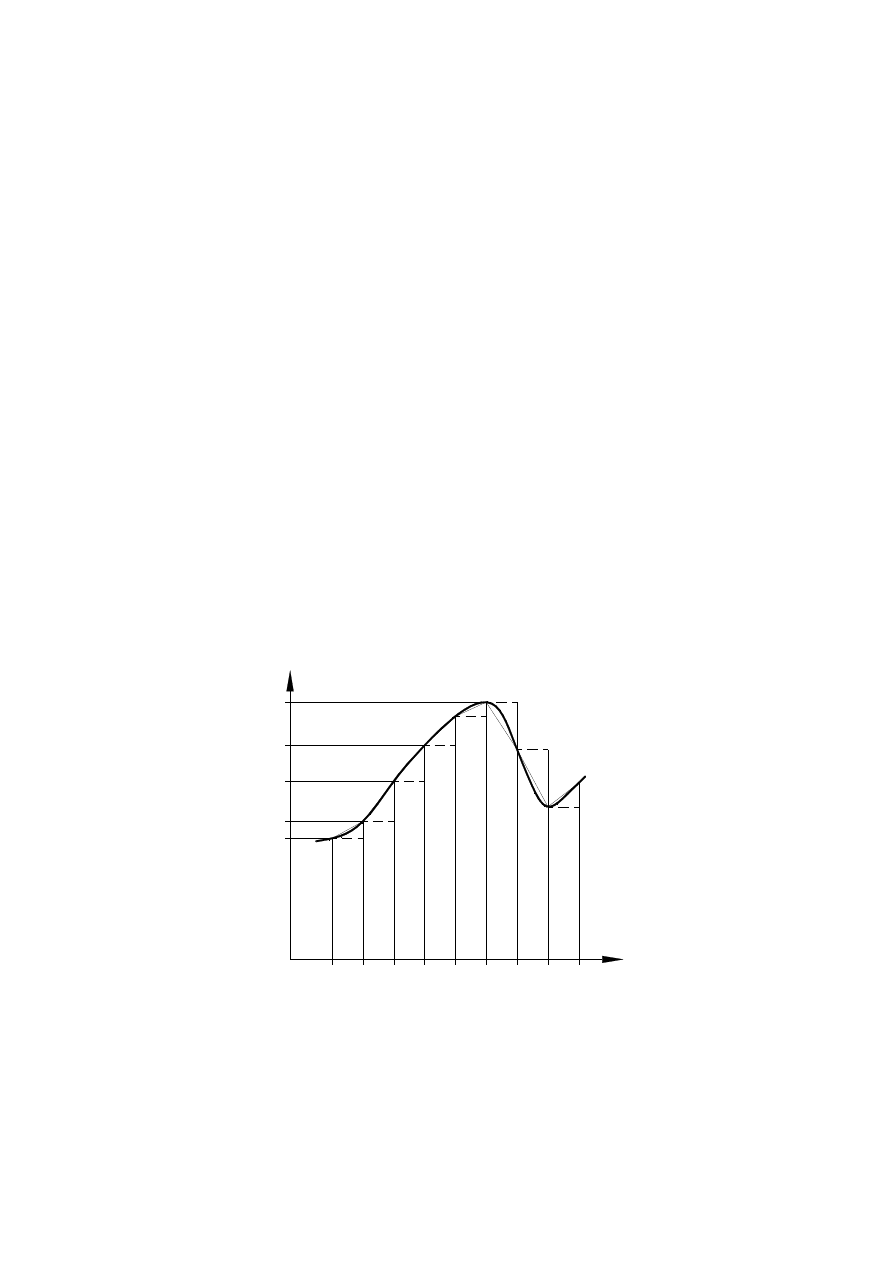
W metodach przybliżonych problem poszukiwania nieznanych funkcji (opisujących
pole przemieszczeń, odkształceń i naprężeń) zastępujemy przez problem poszukiwania
skończonej liczby parametrów, za pomocą których można opisać – w pewnym przybliżeniu-
poszukiwane funkcje.
x
f(x)
x
1
x
2
b
x =a
h
0
x =a+ih
i
h
h
h
f
1
f
2
f
0
3
f
f
i
Rys. 3. Dyskretyzacja i aproksymacja na przykładzie funkcji jednej zmiennej
Dokonujemy tego poprzez dyskretyzację, czyli wybór skończonej liczby parametrów
opisujących w przybliżeniu analizowany problem oraz aproksymację poszukiwanych funkcji

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
5
za pomocą innych z góry założonych prostych funkcji, które uzależnione są od wybranych
parametrów.
Najprostszym przykładem dyskretyzacji i aproksymacji jest numeryczna reprezentacja
dowolnej funkcji f(x) w przedziale <a,b>. Zrealizować możemy to przez podział przedziału
<a,b> na n równych podprzedziałów o długości h=(b-a)/n.
Funkcję ciągłą f(x) reprezentować będzie wtedy zbiór (n+1) wartości f(a+ih), i=0,1,2, n.
Przybliżone wartości funkcji dla dowolnej wartości x z przedziału <a,b> wyznaczać możemy
za pomocą aproksymacji funkcją w podprzedziałach stałą (schodkową), liniową (łamaną) lub
na przykład wielomianowymi funkcjami sklejanymi (rys. 3).
Metody przybliżone analizy ośrodków ciągłych stanowią intensywnie rozwijaną część
współczesnej matematyki. Wiążą się z problemami analizy funkcjonalnej, metod
numerycznych i rachunku wariacyjnego. Prezentuje się je czasem jako szczególne warianty
tak zwanych technik residuów ważonych dla przybliżonego rozwiązywania zagadnień
opisywanych przez równania różniczkowe cząstkowe [5,7].
W naukach technicznych metody przybliżone opisywane są zazwyczaj od strony zastosowań,
jako wyspecjalizowane procedury obliczeniowe dla określonych zagadnień, na przykład pól
deformacji sprężystej, pól temperatury, pół elektrycznych i magnetycznych. Istnieje wiele
metod przybliżonych, stosowanych od dawna w mechanice ciała odkształcalnego i mechanice
konstrukcji, np. metoda Ritza, Galerkina, Trefftza, kollokacji, Kantorowicza [2,6]. Metody te
różnią się postacią modelu matematycznego, sposobem dyskretyzacji i aproksymacji, a także
stosowanym algorytmem obliczeń. Jednak współcześnie dominują te metody przybliżone,
które charakteryzuje łatwość pełnej automatyzacji i które rozwinęły się wraz z rozwojem
technik komputerowych. Najbardziej znane z nich to metoda różnic skończonych (MRS),
metoda elementów skończonych (MES) i metoda elementów brzegowych (MEB). Nazywamy
je metodami numerycznymi lub komputerowymi. Każda z tych metod ma bardzo bogatą
literaturę i prezentowana może być w wielu odmiennych sformułowaniach.
Metoda różnic skończonych bezpośrednio wykorzystuje model matematyczny w
postaci równań różniczkowych opisujących rozwiązywane zagadnienie [4,5]. Dyskretyzacja
polega na ustaleniu w analizowanym obszarze siatki węzłów, np. w przypadku
dwuwymiarowym prostokątnej lub trójkątnej. Przyjmujemy, że w każdym węźle pochodne
można przybliżyć przez tak zwane ilorazy różnicowe, czyli wyrażenia algebraiczne
uzależnione od wartości funkcji w węzłach przyległych. Równanie różniczkowe w każdym
węźle zastępowane jest przez odpowiednie równanie algebraiczne wiążące wartości funkcji w
najbliższych węzłach. W rezultacie otrzymujemy układ równań, których liczba odpowiada
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
6
liczbie węzłów. Niewiadomymi są wartości poszukiwanej funkcji w tych węzłach. Warunki
brzegowe przedstawiane są jako dodatkowe związki łączące wartości funkcji w węzłach
przylegających do konturu analizowanego obszaru.
W metodzie elementów skończonych [6,7] zamiast rozwiązywać równania
różniczkowe poszukujemy przybliżonego rozwiązania sformułowania alternatywnego w
postaci problemu minimalizacji odpowiedniego funkcjonału
1
. Zagadnieniami minimalizacji
funkcjonałów i ich związkami z odpowiednimi równaniami różniczkowymi zajmuje się dział
matematyki nazywany rachunkiem wariacyjnym. W MES analizowany obszar dzielony jest
na podobszary, nazywane elementami skończonymi. W przypadku dwuwymiarowym mogą to
być np. trójkąty lub czworokąty. Elementy skończone łączą się ze sobą w węzłach. Położenie
węzłów elementu wyznacza jego kształt. Przebieg poszukiwanej funkcji u wewnątrz każdego
elementu wyznacza się za pomocą z góry ustalonych funkcji aproksymujących nazywanych
funkcjami kształtu:
( )
( )
i
i
i
u x
N x u
=
∑
gdzie
i
u stanowią wartości funkcji w węzłach, x jest wektorem współrzędnych, a
i
N
są
funkcjami kształtu.
Minimalizowany funkcjonał przedstawić wtedy można jako funkcję wielu zmiennych
Niewiadomymi są zwykle wartości poszukiwanej funkcji w węzłach całego obszaru. Warunek
minimum prowadzi do układu równań liniowych, którego rozwiązanie określa nieznane
wartości funkcji w węzłach.
Metoda elementów brzegowych
[5] wymaga znajomości tak zwanych brzegowych
równań całkowych, które w innej formie wyrażają związki znane w postaci równań
różniczkowych lub w postaci problemu minimalizacji odpowiedniego funkcjonału. Dla wielu
zagadnień tak zwane brzegowe sformułowanie, które wyraża całkowe zależności między
wartościami funkcji i jej pochodnych dla punktów brzegowych jest znane z analizy
matematycznej.
Dyskretyzacja polega na podziale brzegu na małe segmenty zwane elementami brzegowymi.
W przypadku dwuwymiarowym mogą to być odcinki prostych lub też krzywych, których
kształt opisany jest przez wielomiany. Zapisanie dyskretnego odpowiednika równania
całkowego dla każdego węzła prowadzi do układu równań algebraicznych, z którego można
wyznaczyć wartości poszukiwanej funkcji na brzegu.
1
Metoda elementów skończonych może być prezentowana jako oparta na innych sformułowaniach]
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
7
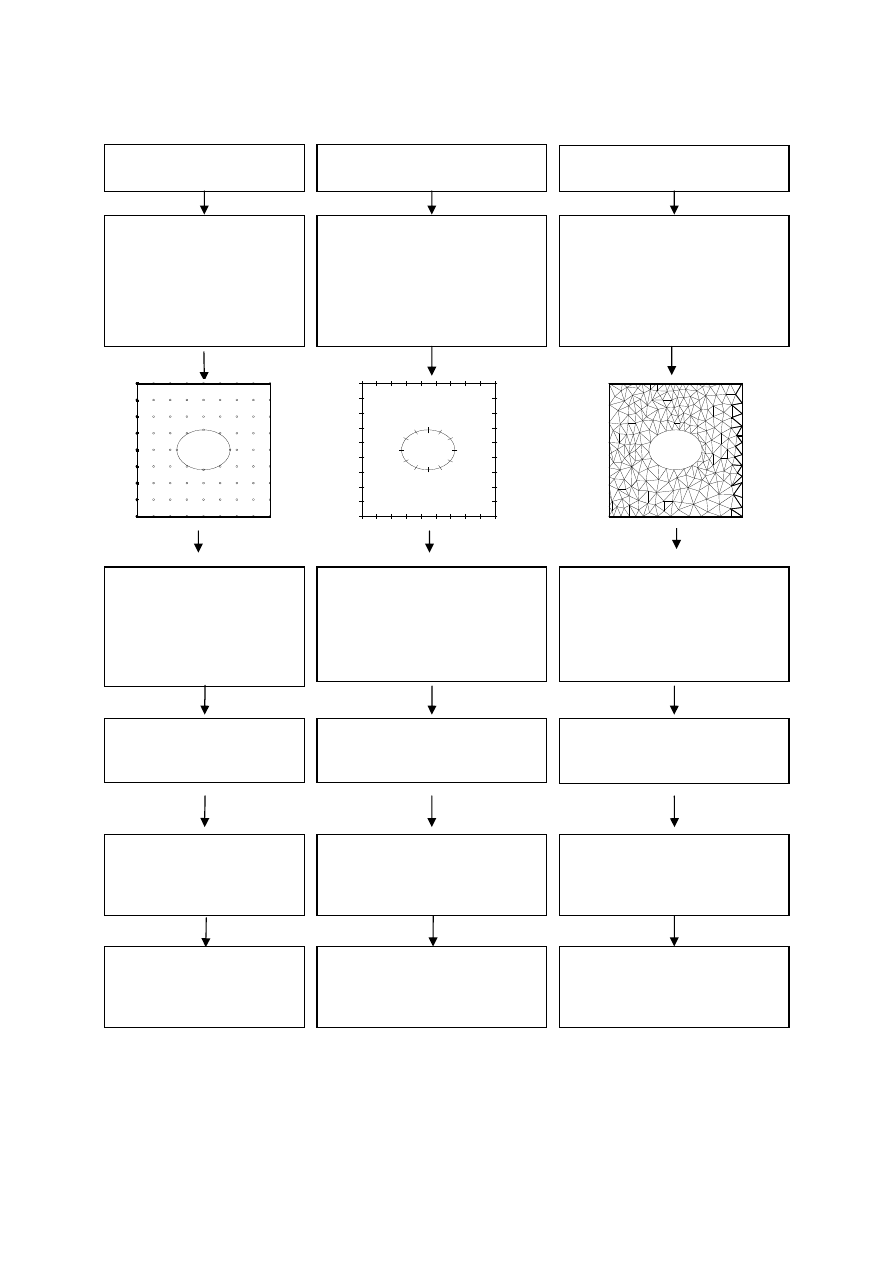
Rys. 4. Ogólny schemat postępowania przy obliczeniach metodą różnic skończonych, metodą
elementów brzegowych i metodą elementów skończonych
Równania różniczkowe
cząstkowe
Budowa siatki węzłów i
przyjęcie wybranych
schematów różnicowych
Całkowe równania brzegowe
Problem minimalizacji
funkcjonału
Podział brzegu na segmenty
(elementy brzegowe) i założenie
odpowiednich funkcji aproksymują-
cych na elementach – funkcji
kształtu
Podział obszaru na małe
podobszary (elementy skończone) i
przyjęcie odpowiednich funkcji
aproksymujących na elementach –
funkcji kształtu
Zastąpienie równań
różniczkowych przez równania
różnicowe dla kolejnych
węzłów obszaru.
Formowanie układu
równańliniowych
Budowa dyskretnej reprezentacji
równania całkowego dla kolejnych
węzłów brzegu.
Formowanie układu równań
liniowych
Budowa macierzy sztywności
kolejnych elementów.
Formowanie układu równań
liniowych
Rozwiązanie układu równań
liniowych (macierz rzadka,
pasmowa, zwykle
symetryczna)
Rozwiązanie układu równań
liniowych (macierz pełna,
niesymetryczna)
Rozwiązanie układu równań
liniowych (macierz rzadka,
pasmowa, zwykle symetryczna)
Modyfikacja układu równań –
wprowadzenie warunków
brzegowych
Modyfikacja układu równań –
wprowadzenie warunków
brzegowych
Modyfikacja układu równań –
wprowadzenie warunków
brzegowych
Obliczenia uzupełniające, np.
poszukiwanych funkcji i ich
pochodnych w wybranych punktach
obszaru
Obliczenia uzupełniające, np.
funkcji i jej pochodnych funkcji
wewnątrz elementów skończonych
Obliczenia uzupełniające, np.
pochodnych poszukiwanych
funkcji w węzłach

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
8
Rysunek 4 przedstawia ogólny szkic algorytmów MRS MEB i MES dla typowego
problemu liniowego, na przykład dla zagadnienia Laplace’a, zagadnienia Poissona lub
liniowego zadania teorii sprężystości.
Porównanie powyższych trzech metod jest w ogólnym przypadku bardzo trudne.
Istnieją pewne szczególne zagadnienia, dla których za najbardziej efektywną można uznać
metodę różnic skończonych lub metodę elementów brzegowych. Jednak niewątpliwie
najbardziej uniwersalną jest metoda elementów skończonych. Fakt ten potwierdza
powszechność zastosowań inżynierskich programów komputerowych MES.
Metoda elementów skończonych powstała w latach pięćdziesiątych XX wieku jako technika
obliczeniowa stosowana praktycznie, bez formalnych podstaw teoretycznych. Podwaliny dało
opracowanie metody analizy wytrzymałościowej poprzez podział złożonych konstrukcji
nośnych na skończoną liczbę uproszczonych elementów składowych. Związki, które musiał
spełniać tak zbudowany model zapisywano w postaci macierzowej. Otrzymywano układy
równań z wieloma niewiadomymi, których liczba związana była z dokładnością przyjętego
modelu.
Czynnikiem wpływającym na gwałtowny rozwój MES był postęp w technice komputerowej i
potrzeby intensywnie rozwijanego wówczas przemysłu zbrojeniowego i lotniczego. Analiza
podstaw teoretycznych metody, jej systematyzowanie i zwiększanie efektywności
doprowadziło do korzystania z MES jako ogólnej metody obliczeń problemów ciągłych w
matematyce, a także do szerokich zastosowań w praktyce inżynierskiej przy analizie pól
naprężeń odkształceń i przemieszczeń, pól elektrycznych, magnetycznych, termicznych,
zagadnień przepływowych a także pól sprzężonych (np. zagadnień naprężeń temperaturowych
czy problemów elektryczno-cieplnych).
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
9
2. METODA RÓŻNIC SKOŃCZONYCH
Metoda różnic skończonych (MRS) jest jedną z najstarszych metod numerycznych
rozwiązywania
zagadnień
opisywanych
równaniami
różniczkowymi
cząstkowymi.
Przyjmujemy w niej, że poszukiwana funkcja określona jest przez zbiór jej wartości w
wybranych punktach (tzw. węzłach), dostatecznie gęsto rozłożonych w analizowanym
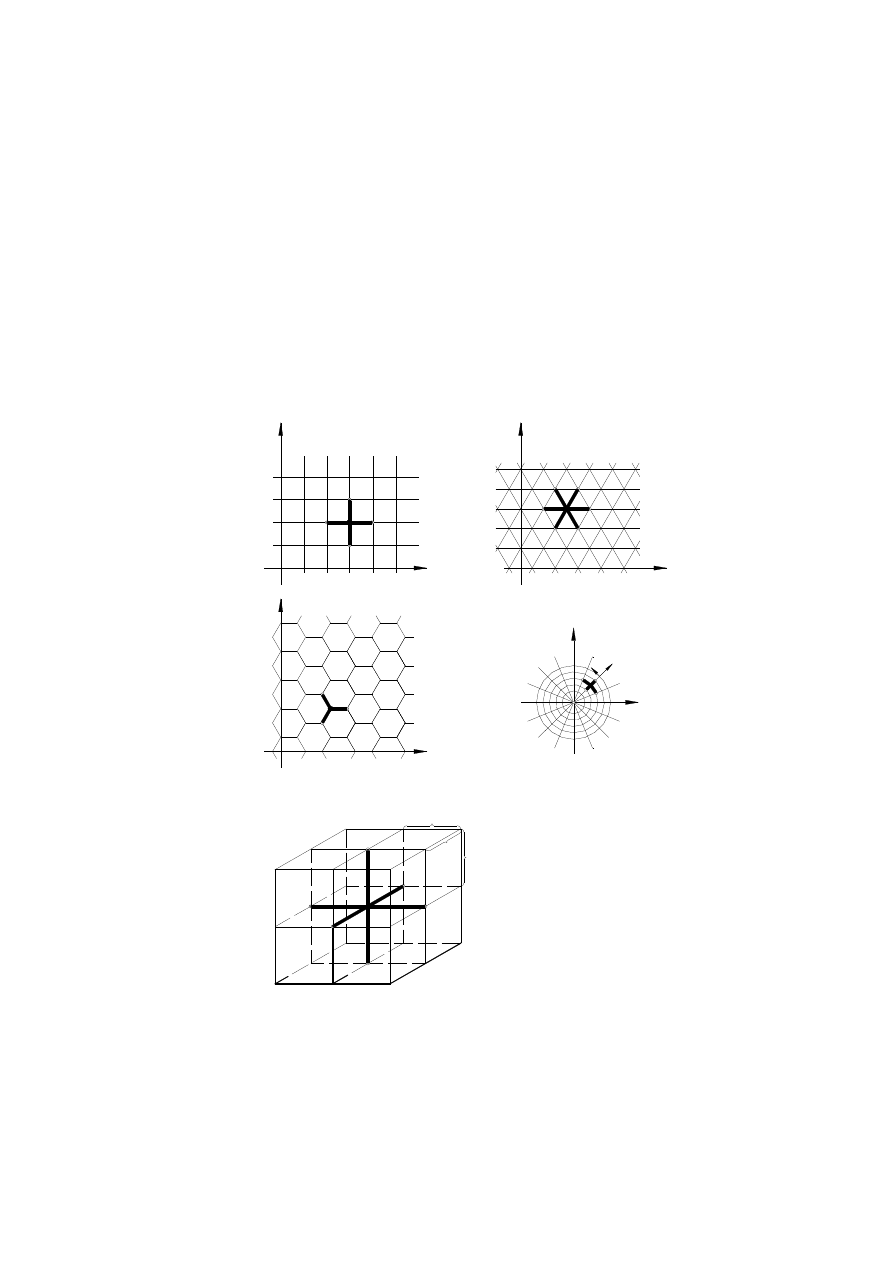
obszarze. Punkty te dobierane są zazwyczaj tak. że tworzą regularne siatki, z których
najprostszymi są siatka prostokątna w przypadku dwuwymiarowym lub prostopadłościenna w
przypadku trójwymiarowym (rys. 5).
x
y
y
a)
r
θ
1
2
3
4
5
6
h
g
0
x
b)
x
y
c)
x
y
d)
e)
l
Rys. 5. Przykłady regularnych siatek MRS: a) prostokątna, b) trójkątna, c) sześciokątna, d) w
układzie biegunowym, e) prostopadłościenna
W metodzie różnic skończonych operatory różniczkowania funkcji zastępowane są
odpowiednimi operatorami różnicowymi. Oznacza to, że wartości pochodnych w punkcie
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
10
zastępowane są przez odpowiednie przyrosty (różnice) funkcji w sąsiadujących węzłach.
Zamieniamy w ten sposób równania różniczkowe na równania algebraiczne, tak zwane
równania różnicowe. W efekcie, zamiast równania różniczkowego, otrzymujemy układ
równań z niewiadomymi będącymi wartościami funkcji w węzłach. Każde równanie
odpowiada odpowiedniemu węzłowi siatki. Otrzymany układ równań jest modyfikowany w
wyniku uwzględnienia warunków brzegowych. Rozwiązaniem układu są wartości
poszukiwanej funkcji we wszystkich węzłach siatki.
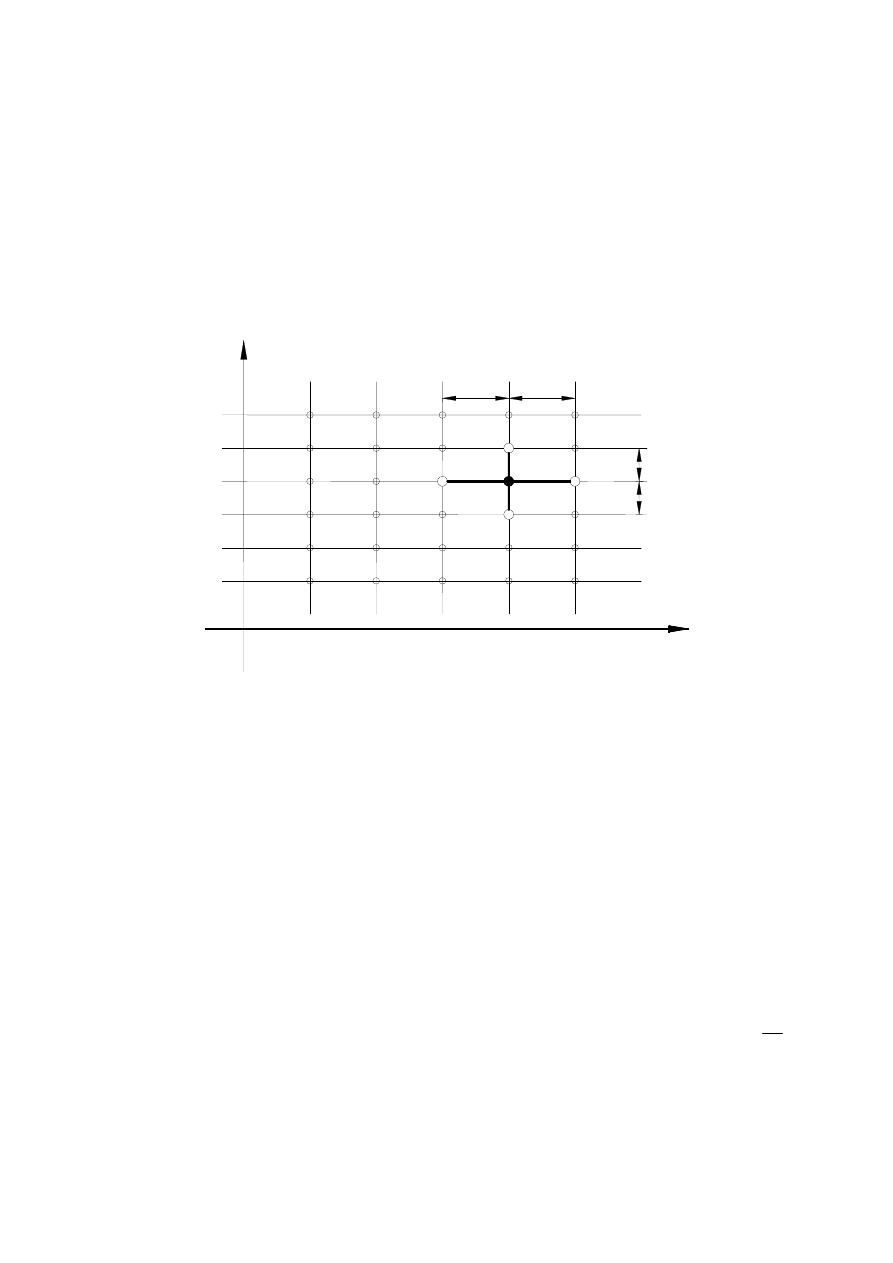
Rys. 6. Dwuwymiarowa siatka prostokątna metody różnic skończonych
Załóżmy, że mamy do czynienia z zagadnieniem dwuwymiarowym we współrzędnych
kartezjańskich xy i stosujemy typową siatkę prostokątną (rys. 6) opisaną przez formuły:
,
,
i
o
k
o
x
x
ih
y
y
kg
= +
=
+
(1)
gdzie
,
o
o
x y
są współrzędnymi wybranego punktu odniesienia.
Przyjmijmy oznaczenie
,
( ,
)
i k
i
k
u
u x y
=
,
(2)
gdzie ( , )
u x y
jest poszukiwaną funkcją.
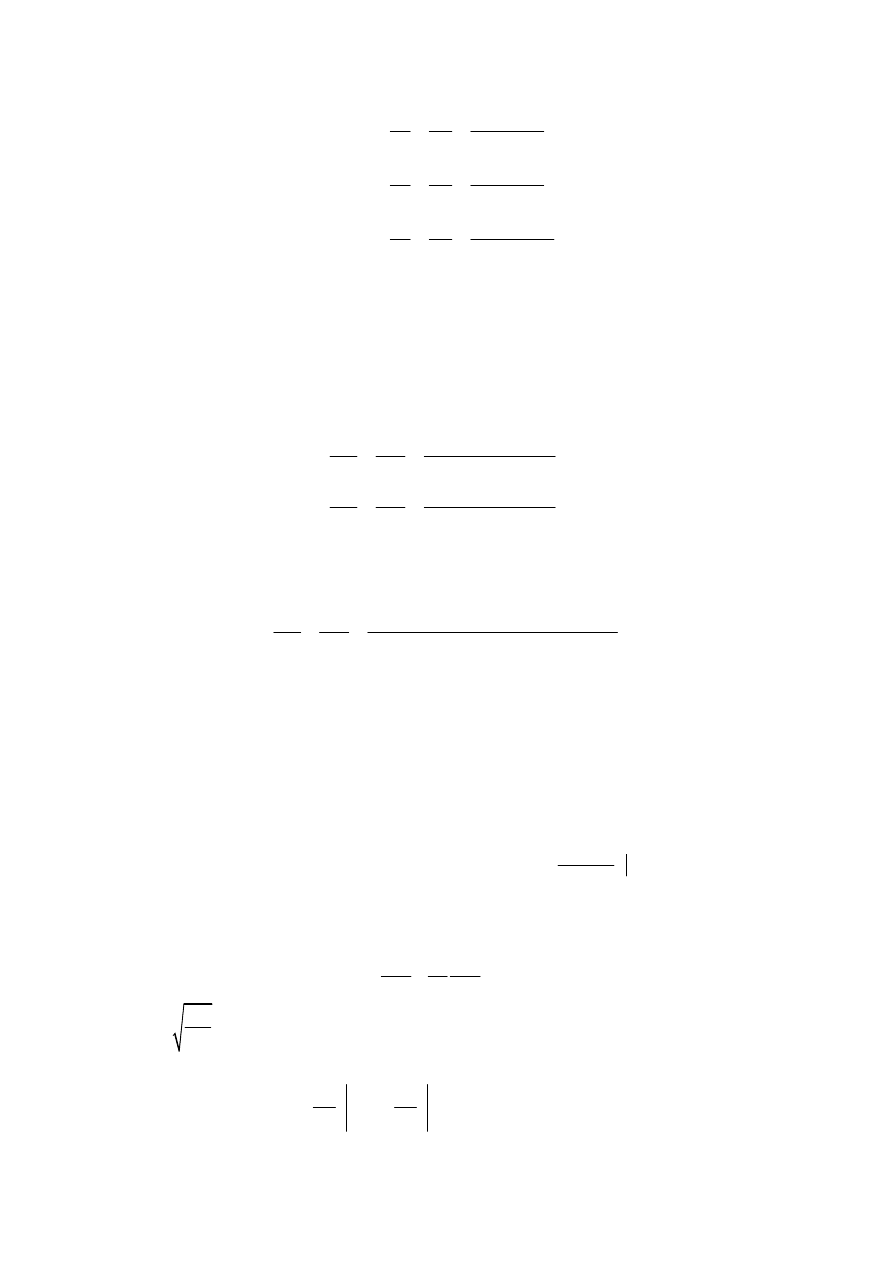
Możemy wówczas definiować różne schematy różnicowe, na przykład pierwszą pochodną
u
y
∂
∂
można zastąpić przez trzy różne operatory różnicowe:
h
h
g
g
u
u
u
u
i,k+1
i,k
i,k-1
i-1,k
u
i+1,k
x
x
x
y
y
y
0
i
0
k
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
11
,
1
,
,
,
1
,
1
,
1
a)
,
b)
,
c)
.
2
i k
i k
i k
i k
i k
i k
u
u
u
u
y
y
g
u
u
u
u
y
y
g
u
u
u
u
y
y
g
+
−
+
−
−
∂
∆
≈
=
∂
∆
−
∂
∆
≈
=
∂
∆
−
∂
∆
≈
=
∂
∆
(3)
Pierwszy z operatorów (3) nazywany ilorazem różnicowym przednim, drugi ilorazem
różnicowym tylnym, a trzeci ilorazem różnicowym centralnym. Ilorazy różnicowe
odpowiadające drugim pochodnym możemy otrzymać stosując analogiczne schematy
powtórnie, tym razem w stosunku do pierwszych pochodnych. Typowe formuły to na
przykład:
2
2
1,
,
1,
2
2
2
2
2
,
1
,
,
1
2
2
2
2
,
2
.
i
k
i k
i
k
i k
i k
i k
u
u
u
u
u
x
x
h
u
u
u
u
u
y
y
g
+
−
+
−
−
+
∂
∆
≈
=
∂
∆
−
+
∂
∆
≈
=
∂
∆
(4)
Podobnie uzyskamy również wyrażenia na ilorazy różnicowe odpowiadające innym
pochodnym np.
4
4
2,
1,
,
1,
2,
4
4
4
4
6
4
i
j
i
j
i j
i
j
i
j
u
u
u
u
u
u
u
x
x
h
+
+
−
−
−
+
−
+
∂
∆
≈
=
∂
∆
(5)
Szczegóły dalszego postępowania czytelnik znajdzie w przykładach.
P
RZYKŁAD
1
Belka o długości l jest utwierdzona sztywno na obu końcach. Znane jest początkowe (dla chwili
0
t
=
) ugięcie
belki
( )
o
w x
oraz rozkład prędkości początkowej
0
0
( , )
( )
( ,
0)
t
w x t
v x
v x t
t
=
∂
=
= =
∂
. Należy obliczyć jak
zmienia się linia ugięcia belki dla
0
t
>
.
Rozwiązanie.
Funkcja
( , )
w x t
opisująca ugięcie belki spełnia równanie różniczkowe.
4
2
4
2
2
1
0
w
w
x
a
t
∂
∂
+
=
∂
∂
,
(6)
gdzie
EJ
a
A
ρ
=
oraz warunki brzegowe
0
(0, )
( , )
0
dla
0,
dla
0,
x
x l
w
t
w l t
t
w
w
t
x
x
=
=
=
=
≥
∂
∂
=
≥
∂
∂
(7)
i warunki początkowe
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
12
0
0
0
( , 0)
( )
dla
(0, ),
( )
dla
(0, ).
t
w x
w x
x
l
w
v x
x
l
t
=
=
∈
∂
=
∈
∂
(8)
Analizujemy obszar
(0, ) (0, )
l
T
×
, gdzie
T
oznacza czas końcowy procesu
(
0)
T
>
. Przyjmijmy prostokątną
siatkę węzłów dla metody różnicowej
,
.
i
j
x
ih
t
jg
=
=
Pochodnym w równaniu (6) odpowiadają ilorazy różnicowe:
4
2,
1,
,
1,
2,
4
4
2
,
,
1
,
2
2
2
4
6
4
,
2
.
i
j
i
j
i j
i
j
i
j
i j
i j
i j
w
w
w
w
w
w
x
h
w
w
w
w
t
g
+
+
−
−
−
−
−
+
−
+
∆
=
∆
−
+
∆
=
∆
(9)
W ten sposób otrzymujemy układ równań liniowych stanowiący przybliżoną, różnicową postać równania
różniczkowego (6):
2
2
4
2,
1,
,
1,
2,
,
,
1
,
2
(
4
6
4
)
(
2
2
)
0,
0,1, 2,..., ,
0,1, 2,... .
i
j
i
j
i j
i
j
i
j
i j
i j
i j
a g w
w
w
w
w
h w
w
w
i
n
j
m
−
−
+
+
−
−
−
+
−
+
+
−
+
=
=
=
(10)
Z warunków brzegowych mamy
,
,
0
dla
0,...,
o j
n j
w
w
j
m
=
=
=
(11)
i z warunków początkowych
,
,1
( )
1, 2,...,
1,
( )
( )
1, 2,...,
1.
i o
o
i
i
o
i
o
i
w
w x
i
n
w
w x
v x
g
i
n
=
=
−
=
+
⋅
=
−
(12)
Układ równań (10) wraz z warunkami (11) i (12) może być rozwiązywany dla kolejnych kroków czasowych
j=2,3,4....[10].
Rozwiązaniem jest wektor
j
w
opisujący w przybliżeniu linię ugięcia belki w chwili
j
t
(
)
2
2
1
2
4
2
j
j
j
a
g
w
A I
w
w
n
−
−
⋅
=
+
−
,
(13)
gdzie
I
jest macierzą jednostkową,
6
4
1
0
0
...
0
0
4
6
4
1
0
...
0
0
1
4
6
4
1
...
0
0
0
1
4
6
4 ...
0
0
0
0
0
0
0
...
6
4
0
0
0
0
0
...
4
6
A
−
−
−
−
−
=
−
−
−
−
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
,
(14)
jest macierzą nieosobliwą a wektor
j
w
ma postać
2,
3,
2,
j
j
j
n
j
w
w
w
w
−
=
⋮
.
(15)
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
13
Wektory
j
w
oblicza się korzystając ze znajomości wektorów linii ugięcia dla poprzedzających punktów
czasowych
1
j
w
−
i
2
j
w
−
, przy czym
0
w
i
1
w
wynikają z warunków początkowych
0
2
0
2
0
2
0
3
0
3
0
3
0
1
0
2
0
2
0
(
)
(
)
(
)
( )
( )
( )
(
)
(
)
(
)
n
n
n z
w x
w x
v x
g
w x
w x
v x
g
w
w
w x
w x
v x
g
−
−
−
+
⋅
+
⋅
=
=
+
⋅
⋮
⋮
(16)
Wymiar wektorów
j
w
jest zmniejszony, ponieważ warunki brzegowe dają nam
0,
0
j
w
=
,
1,
0
j
w
=
,
1,
0
n
j
w
−
=
,
,
0
n j
w
=
.
P
RZYKŁAD
2
Przedstawić równania różnicowe dla siatki prostokątnej opisanej przez związki (1) dla
a)
równania Poissona
2
2
2
2
( , )
0
u
u
f x y
x
y
∂
∂
+
+
=
∂
∂
,
(17)
b)
równania Helmholtza
2
2
2
2
2
0
u
u
k u
x
y
∂
∂
+
+
=
∂
∂
,
(18)
c)
równania przewodnictwa ciepła
2
2
2
1
0
u
u
x
a
t
∂
∂
+
=
∂
∂
.
(19)
Rozwiązanie:
a)
Zastępując pochodne w równaniach różniczkowych przez odpowiednie ilorazy różnicowe otrzymamy:
(
)
(
) (
)
1,
,
1,
,
1
,
,
1
2
2
1
1
2
2
,
0
i
j
i j
i
j
i j
i j
i j
i
j
u
u
u
u
u
u
f x y
h
g
+
−
+
−
−
+
+
−
+
+
=
.
(20)
Jeśli przyjmiemy
h
g
=
(siatka kwadratowa) i
0
f
≡
(równanie Laplace’a) to uzyskamy wynik:
1,
1,
,
1
,
1
,
4
i
j
i
j
i j
i j
i j
u
u
u
u
u
+
−
+
−
+
+
+
=
.
(21)
Wartość funkcji w węźle jest wtedy równa średniej arytmetycznej z wartości funkcji w 4 najbliższych węzłach,
oddalonych o
h
.
b)
Sprowadzenie do postaci różnicowej daje
(
)
2
2
,
1,
1,
,
1
,
1
4
i j
i
j
i
j
i j
i j
u
g h
u
u
u
u
+
−
−
+
⋅ −
=
+
+
+
.
(22)
c)
Przyjmując
x
h
∆ =
,
t
g
∆ =
otrzymamy
(
)
2
2
2
2
2
1,
,
1,
,
1
2
i
j
i j
i
j
i j
a gu
h
a g u
a gu
h u
+
−
−
−
+
+
= −
.
(23)
P
RZYKŁAD
3
Jednowymiarowy model zginania belki jest opisany równaniem różniczkowym (patrz cz. I, wzór (1.75))
4
4
d w
p
dx
EJ
=
,
(24)
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
14
gdzie
( )
w x
jest funkcją ugięcia belki,
p
obciążeniem ciągłym (N/m),
E
modułem Younga a
J
odpowiednim momentem bezwładności przekroju.
Po zastosowaniu dyskretyzacji: określeniu położenia węzłów dla metody różnic skończonych wg formuły
i
x
a ih
= +
, możemy zastosować centralny iloraz różnicowy dla czwartej pochodnej i równanie różniczkowe
(24) zastąpimy przez równanie
2
1
1
2
4
4
6
4
i
i
i
i
i
i
w
w
w
w
w
p
h
EJ
−
−
+
+
−
+
−
+
=
,
(25)
gdzie
( )
i
i
p
p x
=
.
Możliwe są różne typy warunków brzegowych, które zapisujemy, uwzględniając, że :
a)
wielkość ugięcia w punkcie odpowiada wartości funkcji
( )
w x
,
b)
kąt ugięcia, w zakresie małych deformacji odpowiada wartości pochodnej
dw
dx
,
c)
moment gnący w przekroju
x
jest związany z funkcją ugięcia wzorem
2
2
( )
d w
M x
EJ
dx
=
,
(26)
d)
siła tnąca w przekroju
x
jest związana z linią ugięcia
( )
w x
wzorem
3
3
( )
d w
T x
EJ
dx
=
.
(27)
Uwzględniając powyższe stwierdzenia możemy rozpatrzyć typowe warunki brzegowe (rys. 7) zakładając w
każdym przypadku, że węzeł
k
odpowiada przekrojowi belki z narzuconym warunkiem brzegowym
Przekrój utwierdzony
Odpowiednie warunki brzegowe mają postać:
(
)
0,
(
)
0,
k
k
dw
w x
x
dx
=
=
co po dyskretyzacji prowadzi do zależności
1
1
0,
0.
2
k
k
k
w
w
w
h
+
−
−
=
=
(28)
Jeżeli punkt
k
jest początkiem (końcem) rozpatrywanego przedziału
x
możemy przyjąć odpowiednio
1
0
k
w
+
=
(
1
0
k
w
−
=
).
Przekrój przegubowo podparty, nieobciążony
Odpowiednie warunki brzegowe mają postać
(
)
0
k
w x
=
oraz
(
)
0
k
M x
=
.
Po dyskretyzacji otrzymamy
1
1
2
2
0
i
0
k
k
k
k
w
w
w
w
h
+
−
−
+
=
=
(29)
Przekrój swobodny i obciążony momentem
g
M
Warunki brzegowe odpowiadające temu przypadkowi to
(
)
0
k
T x
=
i
(
)
k
g
M x
M
=
.
Odpowiednie równania różnicowe mają postać:
2
1
1
2
3
2
2
0
k
k
k
k
w
w
w
w
h
+
+
−
−
−
+
−
=
i
1
1
2
2
k
k
k
g
w
w
w
EJ
M
h
+
−
−
+
=
.
(30)
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
15
Mg
k - 1
k
k + 1
k + 2
k
k + 1
k + 2
k - 1
k - 2
k
k + 1
k + 2
k - 1
k - 2
Rys. 7. Warianty warunków brzegowych w modelu MRS belki zginanej (przykład 3)
W metodzie różnic skończonych siatka węzłów obejmuje często zarówno węzły leżące
wewnątrz analizowanego obszaru, jak i dodatkowe węzły zewnętrzne, które ułatwiają
wprowadzanie warunków brzegowych.
W przypadkach dwu- i trójwymiarowych często zdarza się, że brzeg obszaru przebiega
między węzłami regularnej siatki (rys. 8). W takim przypadku węzłom leżącym najbliżej
konturu przypisujemy wartości wynikające z interpolacji lub ekstrapolacji.
1
2
0
1
2
0
h
h
δ
δ
a)
b)
Rys. 8. Interpolacja i ekstrapolacja warunku brzegowego w MRS
Jeśli ostatni węzeł siatki (1) leży wewnątrz konturu (rys. 8a), to zamiast narzuconego
warunku na wartość funkcji
0
u
u
=
wprowadzamy związek
0
2
1
hu
u
u
h
δ
δ
+
=
+
.
(31)
W przeciwnym przypadku (rys. 8b) mamy

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
16
0
2
1
hu
u
u
h
δ
δ
−
=
−
.
(32)
Metoda różnic skończonych ma wiele zalet, dzięki którym w przeszłości uważana była
za najbardziej efektywną metodę obliczeń zautomatyzowanych. Do najważniejszych z nich
należą prostota algorytmów i bezpośrednie wykorzystanie równań różniczkowych problemu.
W pewnych obszarach jest do dziś praktycznie stosowana, np. w analizie tarcz i płyt, czy w
zagadnieniach przepływowych.
MRS napotyka na szereg trudności w przypadku obszarów o złożonych kształtach i
skomplikowanych warunków brzegowych. Dla poprawienia jej efektywności opracowano
pewne modyfikacje i udogodnienia mające na celu ułatwienie budowy modelu dyskretnego,
np. algorytmy MRS dla nieregularnych siatek węzłów.

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
17
3. METODA ELEMENTÓW BRZEGOWYCH
Metoda elementów brzegowych (MEB) jest stosunkowo nową komputerową metodą
rozwiązywania zagadnień opisywanych równaniami różniczkowymi cząstkowymi. Jej
podstawą jest sprowadzenie zadania brzegowego lub brzegowo-początkowego opisanego za
pomocą układu równań różniczkowych cząstkowych z odpowiednimi warunkami
granicznymi do tak zwanych brzegowych równań całkowych. Równania te są rozwiązywane
w sposób przybliżony przez podział brzegu na segmenty zwane elementami brzegowymi i
przyjęcie odpowiedniej aproksymacji analizowanych funkcji na elementach brzegowych za
pomocą z góry założonych funkcji modelujących. Warto podkreślić, że w MEB zwykle
niezbędna jest dyskretyzacja tylko brzegu obszaru a nie całego analizowanego obszaru, co
prowadzi do znacznego zmniejszenia liczby niewiadomych w porównaniu do metody różnic
skończonych i metody elementów skończonych. Mówimy, że MRS i MES należą do tzw.
metod obszarowych przybliżonego rozwiązywania zagadnień brzegowo-początkowych a
MEB reprezentuje metody brzegowe.
Metodę elementów brzegowych omówimy najpierw na przykładzie równania różniczkowego
Poissona w przypadku dwuwymiarowym. W poprzednim rozdziale przedstawiony był sposób
rozwiązania tego równania metodą różnic skończonych. Rozwiązanie zagadnienia Poissona
metodą elementów skończonych omówione będzie w rozdziale następnym.
3.1. METODA ELEMENTÓW BRZEGOWYCH DLA RÓWNANIA
POISSONA
Rozpatrzmy równanie Poissona:
2
2
1
2
2
2
1
2
( ,
)
0
u
u
f x x
x
x
∂
∂
+
+
=
∂
∂
,
(33)
gdzie
1
2
( ,
)
x
x x
=
∈Ω
z warunkami brzegowymi
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
18
0
0
( )
,
( )
( )
,
u
q
u x
u
x
u x
q x
q
x
n
=
∈Γ
∂
=
=
∈Γ
∂
(34)
Równanie Poissona i Laplace’a (gdy
1
2
( ,
)
0
f x x
=
) opisuje wiele zjawisk o dużym znaczeniu
w technice: stacjonarny przepływ ciepła, stacjonarny bezwirowy przepływ nieściśliwej i
nielepkiej cieczy, proste pola magnetyczne i elektryczne [4]. W teorii sprężystości równanie
Poissona opisuje rozkłady naprężeń w przekroju pręta skręcanego .
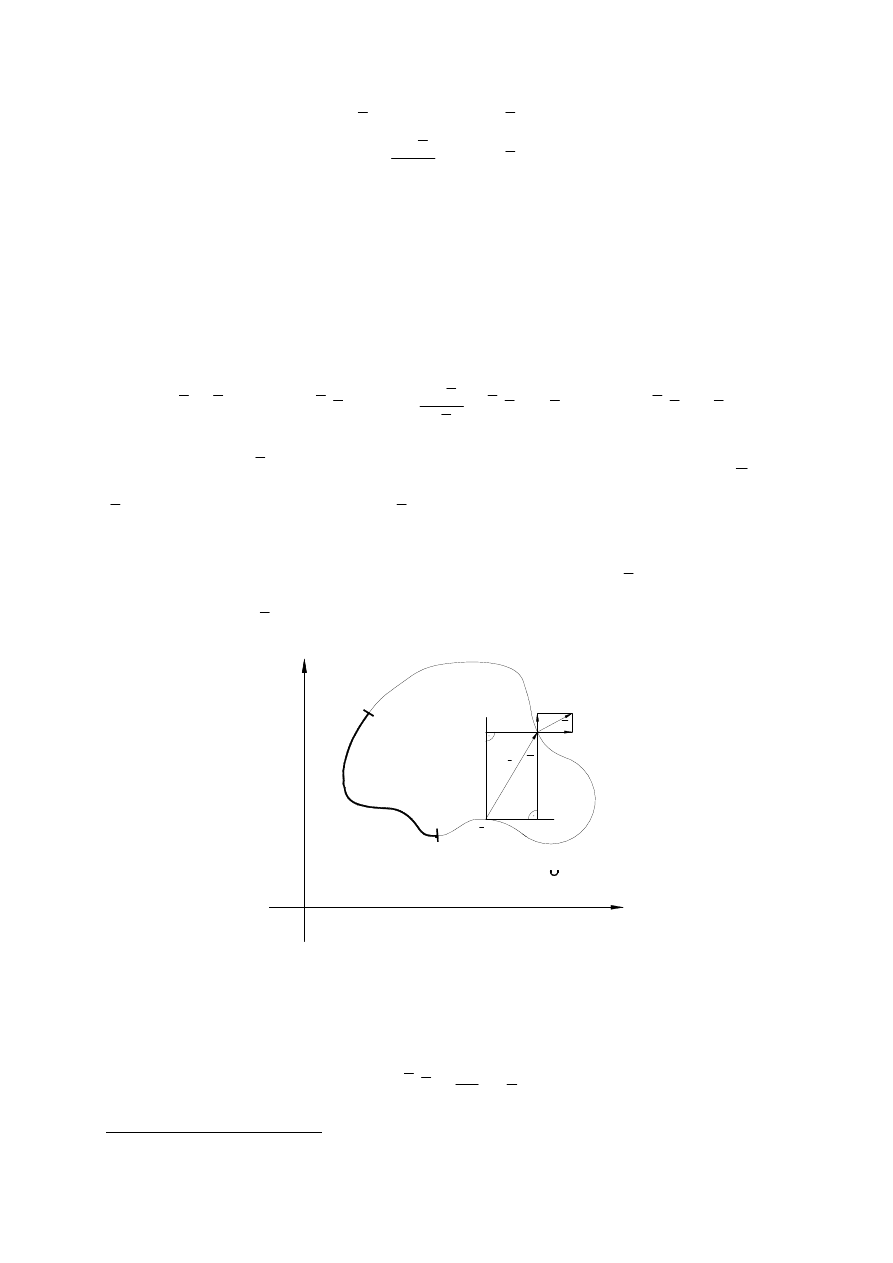
Dla takiego zagadnienia przedstawić można brzegowe równanie całkowe
2
, które stanowi
sformułowanie równoważne problemowi opisanemu przez związki (33) i (34).
( )
( ) ( )
( )
( , )
( )
( , )
( )
( )
( , )
( )
u x
c
u
u x q
x d
x
u
x d
x
f x u
x dR x
n
ξ
ξ
ξ
ξ
ξ
∗
∗
∗
Γ
Γ
Ω
∂
=
Γ
−
Γ
+
∂
∫
∫
∫
(35)
W równaniu (35) ( )
c
ξ
jest współczynnikiem liczbowym, którego wartość jest równa
1
2
jeśli
ξ
leży na gładkim konturze, a 1 dla
ξ
leżącego wewnątrz obszaru. W przypadku naroża
współczynnik ten należy specjalnie obliczać.
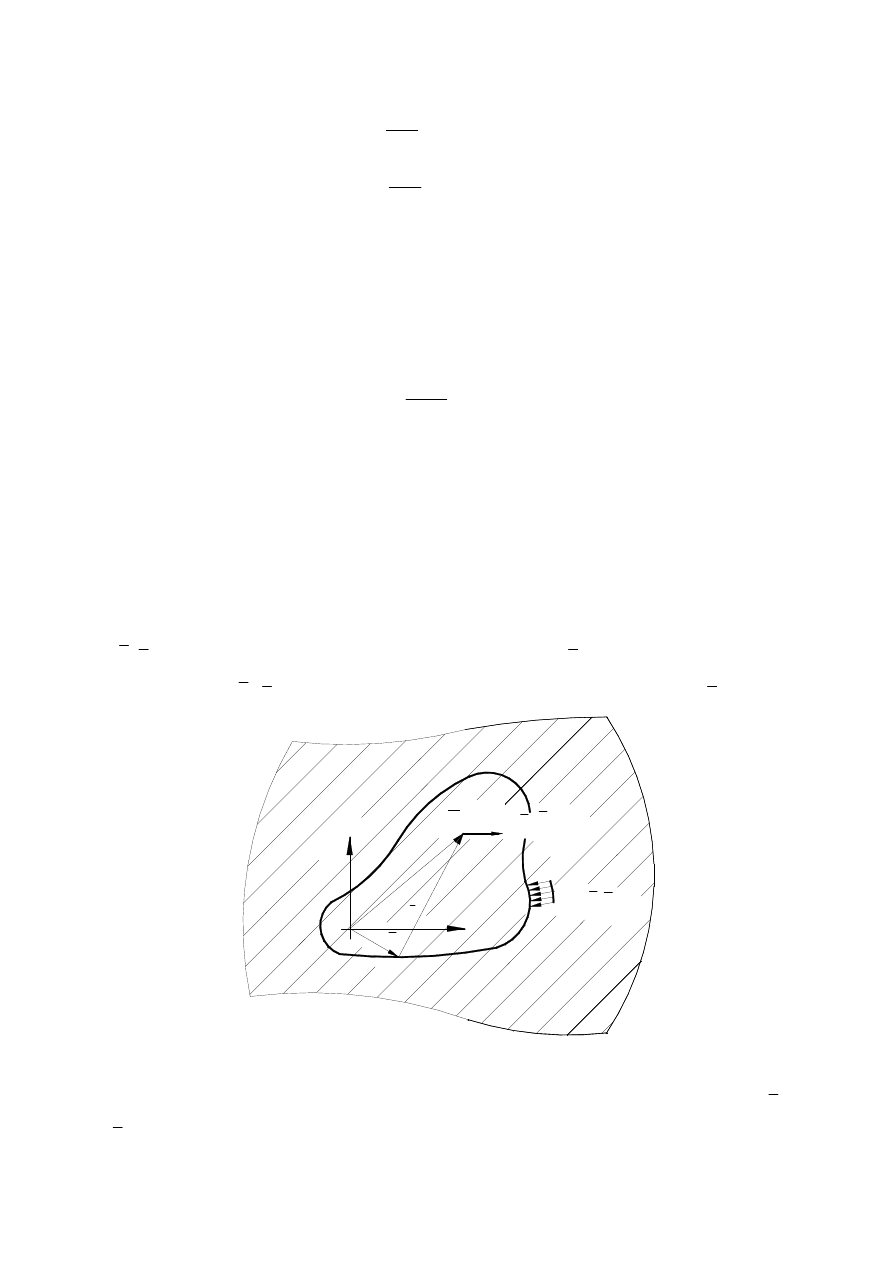
Funkcje u
∗
i q
∗
zależą od położenia dwóch punktów: punktu
ξ
zwanego punktem
ź
ródłowym i punktu x zwanego punktem obserwacyjnym (rys. 9).
x
x
2
1
r
r
r
1
2
Ω
Γ
Γ
u
Γ Γ =Γ
u
q
q
n
n
n
1
2
ξ
x
Rys. 9. Oznaczenia pomocnicze do brzegowego sformułowania zagadnienia Poissona
Funkcja u
∗
znana w teorii równań całkowych, jako tak zwane rozwiązanie fundamentalne ma
postać:
1
1
( , )
ln
2
u
x
r
ξ
π
∗
=
=
,
(36)
2
wyprowadzenie równania (35) znaleźć można w monografiach teorii spręzystości
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
19
gdzie
2
2
1
1
2
2
(
)
(
)
r
x
x
ξ
ξ
=
−
+
−
.
Funkcja q
∗
określona jest przez pochodną kierunkową u
∗
:
( , )
( , )
u
x
q
x
n
ξ
ξ
∗
∗
∂
=
∂
.
(37)
Dokonując różniczkowania otrzymamy
1
2
1
2
1
1
2
2
2
,
(
)
,
2
u
u
q
n
n
x
x
r n
r n
q
r
π
∗
∗
∗
∗
∂
∂
=
⋅ +
⋅
∂
∂
− ⋅ + ⋅
=
(38)
gdzie
,
i
i
i
r
x
ξ
= −
1, 2
i
=
, a
1
2
,
n
n n
=
jest jednostkowym wektorem zewnętrznie normalnym
do brzegu
Γ
.
Wzór (38) można łatwo otrzymać, zauważając, że
i
i
i
i
x
r
r
x
r
r
ξ
−
∂ =
=
∂
.
(39)
Brzegowe równanie całkowe (35) wiąże ze sobą nieznane funkcje
( )
u x i jej pochodną
normalną
( )
( )
u x
q x
n
∂
=
∂
na konturze obszaru. W trzeciej całce, obszarowej, funkcje
podcałkowe są znane. Równanie (35) można rozwiązać numerycznie w sposób przybliżony,
realizując następujący schemat:
1.
Brzeg
Γ
dzielimy na LE elementów brzegowych, będących odcinkami lub
krzywoliniowymi segmentami z węzłami wyznaczającymi ich kształt.
2.
Na każdym elemencie brzegowym funkcje
( )
u x i
( )
( )
u x
q x
n
∂
=
∂
aproksymujemy za
pomocą wartości w węzłach i odpowiednich, z góry założonych funkcji interpolacyjnych.
3.
Wykorzystując przyjętą dyskretyzację przekształcamy równania całkowe formułowane
dla każdego węzła (punktu
ξ
) w algebraiczne równanie liniowe.
4.
Otrzymujemy układ równań liniowych wiążący ze sobą wartości
i
u i
i
q funkcji ( )
u x i
( )
q x dla wszystkich węzłów konturu. Układ ten rozwiązujemy po wprowadzeniu
warunków brzegowych (w każdym węźle znamy albo
i
u albo
i
q ). Rozwiązaniem jest
wektor nieznanych wartości funkcji ( )
u x i jej pochodnych w węzłach brzegu.
5.
Jeśli chcemy wyznaczyć wartości funkcji u dla punktów wewnętrznych wykorzystujemy
ponownie wzór (35) przenosząc punkt
ξ
do wewnątrz obszaru. Wtedy
( ) 1
c
ξ
=
i
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
20
ponieważ znane są już wartości funkcji i jej pochodnych na konturze zadanie sprowadza
się do zwykłego numerycznego całkowania.
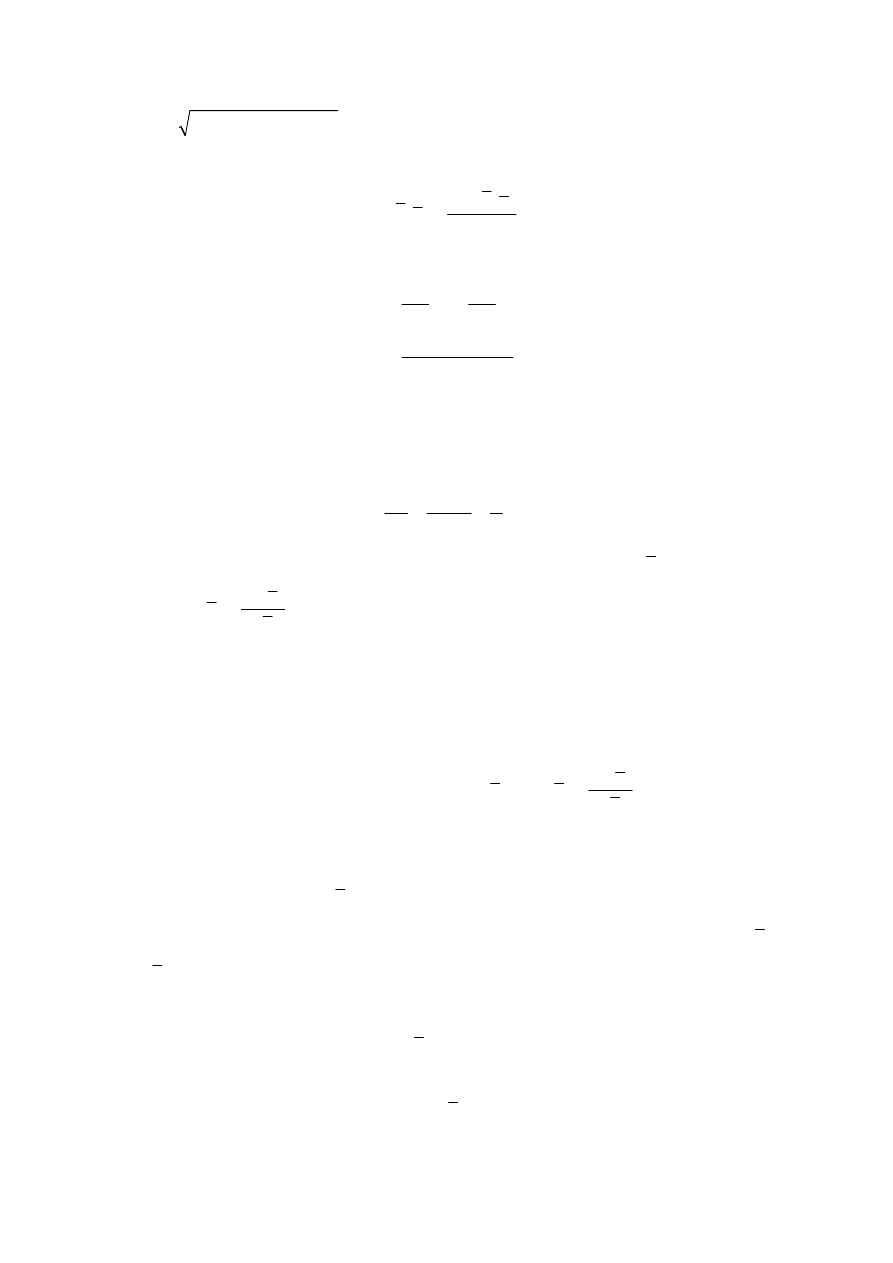
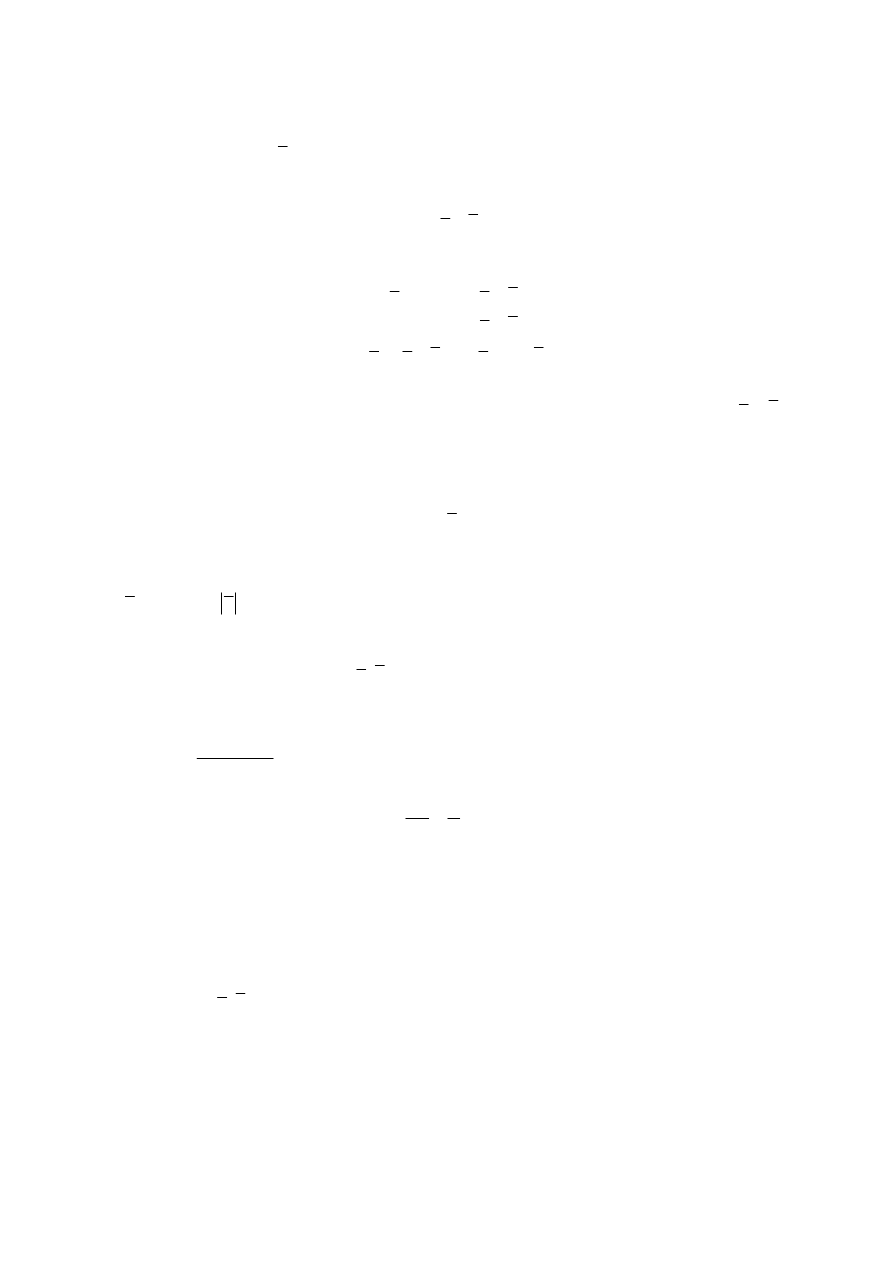
Rozpatrzmy na przykład przebieg obliczeń dla najprostszych elementów brzegowych, tzw.
elementów stałych (rys. 10). Element brzegowy jest w tym przypadku odcinkiem a węzeł tego
elementu usytuowany jest w środku.
x
x
2
1
P
P
j
i
r
Rys. 10. Podział brzegu na elementy stałe (o stałych wartościach funkcji aproksymowanych)
Zakładamy, że na każdym elemencie funkcje ( )
u x i ( )
q x przybliżamy funkcjami stałymi.
Otrzymamy wtedy dla każdego węzła i związek
1
1
1
( )
( , ) (
)
( , ) (
)
2
( )
( , )
1, 2,..
j
j
LE
LE
i
i
j
j
i
j
j
j
j
i
u P
u P x q P d
q P x u P d
f x u P x dR
i
LE
∗
∗
=
=
Γ
Γ
∗
Ω
=
Γ −
Γ
+
=
∑
∑
∫
∫
∫
(40)
Dla obliczenia wartości trzeciej całki, ze znanymi funkcjami podcałkowymi, niezbędna jest
pomocnicza dyskretyzacja obszaru. Przyjmijmy oznaczenie
( )
( , )
( )
i
i
f
f x u P x d
x
∗
Ω
=
Ω
∫
.
(41)
Po numerycznym całkowaniu dla każdego punktu węzłowego otrzymujemy związek
1
1
1
( )
(
)
(
)
,
1, 2...
2
LE
LE
i
ij
j
ij
j
i
j
j
u P
U
q P
Q u P
f
i
LE
∗
∗
=
=
=
⋅
−
⋅
+
=
∑
∑
.
(42a)
{ }
{ }
{ } { }
1
2
u
U
q
Q
n
f
∗
∗
=
−
+
.
(42b)
Otrzymamy więc LE równań liniowych, w których niewiadome (42b) stanowią nieznane
wartości (
)
j
u P (jeśli węzeł
j
P leży na części
q
Γ
konturu) i ( )
i
q P (jeśli węzeł
i
P leży na
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
21
części
u
Γ
konturu). Oznaczając te niewiadome jako
{ }
y
układ (42) możemy doprowadzić do
postaci:
[ ]
{ } { }
A
y
b
=
(43)
gdzie macierz
[ ]
A
i wektor prawych
{ }
b
stron są znane.
W rezultacie otrzymujemy kompletną informację o funkcji ( )
u x i jej pochodnych na brzegu.
W odróżnieniu do MRS i MES, gdzie analogiczna macierz jest zazwyczaj pasmowa i
symetryczna, w metodzie elementów brzegowych otrzymujemy macierz A pełną i
niesymetryczną.
3.2. DWUWYMIAROWE ZAGADNIENIE TEORII SPRĘŻYSTOŚCI.
BRZEGOWE RÓWNANIE CAŁKOWE
Opis matematyczny MEB dla zagadnień teorii sprężystości może być formułowany na
wiele sposobów [5] i jest bardziej złożony niż w metodzie różnic skończonych, czy metodzie
elementów skończonych. W tym rozdziale prezentowany jest skrótowy obraz tak zwanego
podejścia bezpośredniego, w którym niewiadomymi w równaniach całkowych są
przemieszczenia i naprężenia.
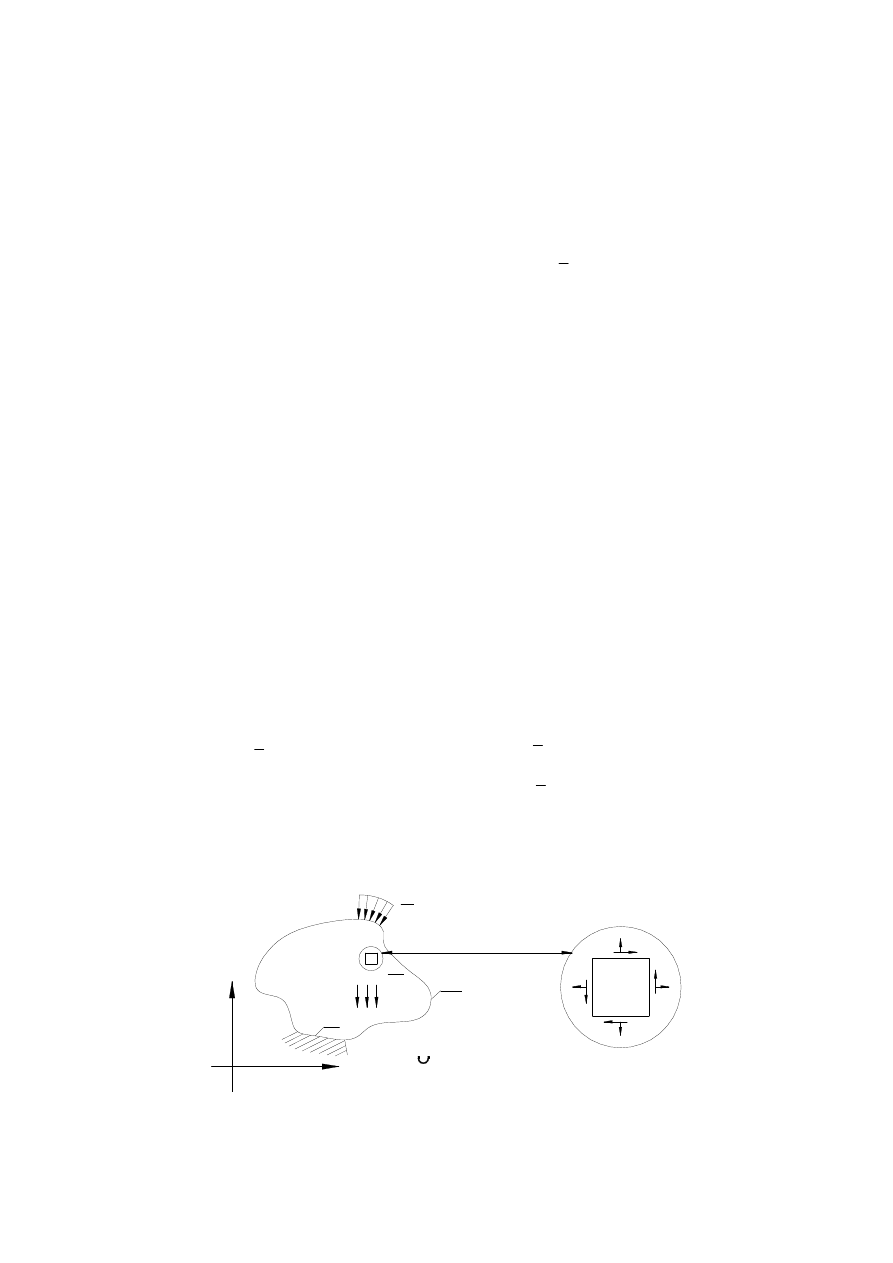
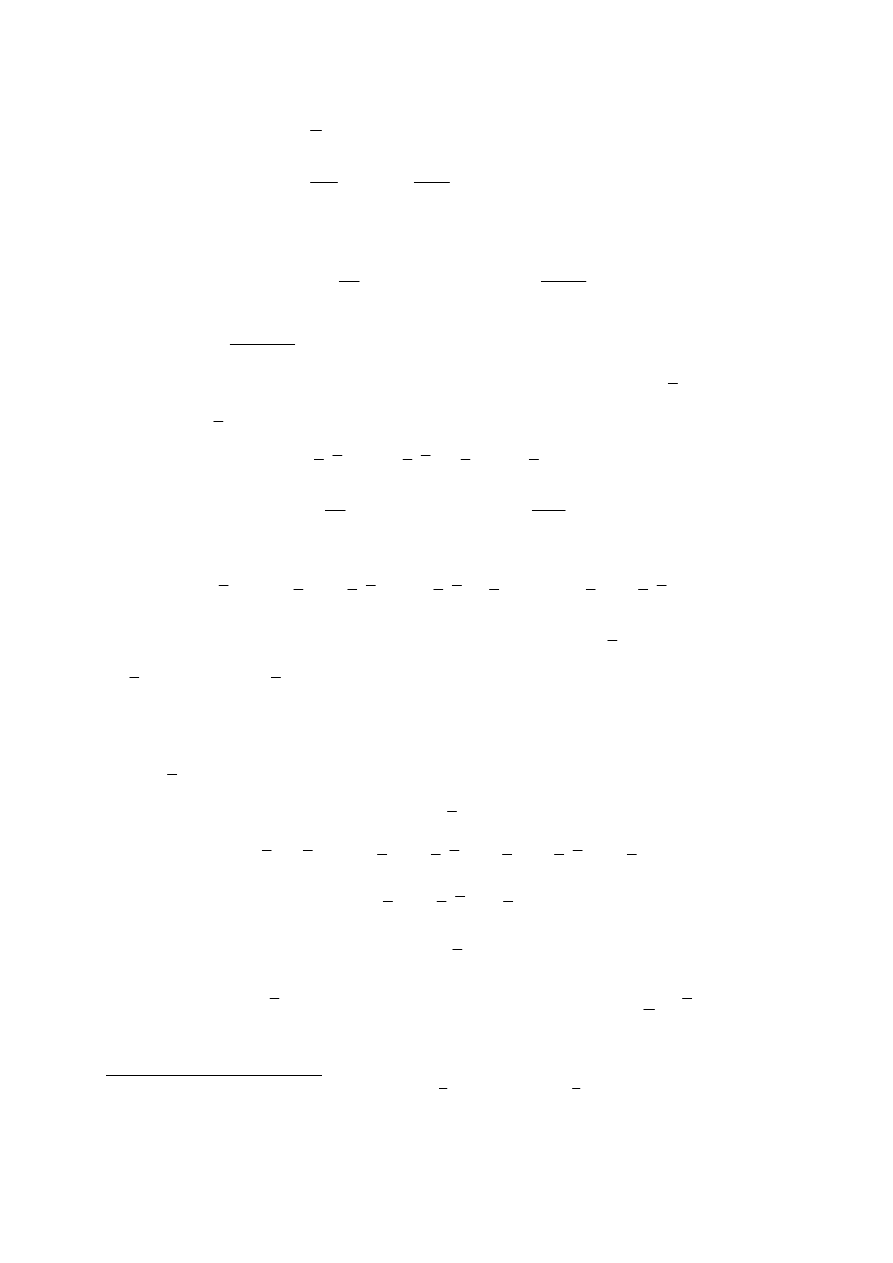
Rozpatrujemy izotropowe, jednorodne ciało liniowo sprężyste zajmujące w przestrzeni
2
R obszar
Ω
i znajdujące się w stanie równowagi pod działaniem sił zewnętrznych:
powierzchniowych
1
2
1
2
( ,
)
(
,
)
p x x
p p
=
i objętościowych
1
2
1
2
( ,
)
(
,
)
X x x
X X
=
. Obciążenia te
powodują powstanie odpowiedniego pola przemieszczeń
1
2
1
2
( ,
)
( ,
)
u x x
u u
=
i pola naprężeń
1
2
( ,
),
ij
x x
σ
,
1, 2
i j
=
(rys. 11).
X
p
22
11
12
11
22
x
x
2
1
Γ Γ =Γ
u
q
Γ
u
Ω
Γ
q
σ
σ
σ
σ
σ
Rys. 11. Analizowane ciało sprężyste

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
22
Polu przemieszczeń u odpowiada tensor odkształcenia:
(
)
,
,
1
2
ij
i j
j i
u
u
ε
=
+
.
(44)
Różniczkowe równanie równowagi w układzie kartezjańskim
1 2
x x
ma postać:
,
0
ji j
i
X
σ
+
=
,
(45)
gdzie
ij
σ
jest symetrycznym tensorem naprężenia.
Ciało jest podparte na części
u
Γ
brzegu (znane przemieszczenia
1
2
ˆ ˆ
( ,
)
u u u
∆
) i obciążone na
Części
p
Γ
(znane obciążenia
1
2
ˆ
ˆ
(
,
)
p
p p
∆
=
). Mamy więc warunki brzegowe:
ˆ ,
(
)
i
ji
j
i
p
p
n
p
x
σ
=
=
∈Γ
,
(46)
gdzie
1
2
( ,
)
n
n n
=
jest wersorem normalnym zewnętrznie do konturu oraz
ˆ ,
(
)
i
i
u
u
u
x
=
∈Γ
.
(47)
Związek między tensorami odkształcenia i naprężenia określają poniższe zależności,
wyrażające uogólnione prawo Hooke’a. Dla płaskiego stanu naprężenia (PSN):
2
1
1
ij
ij
ij
kk
E
Ev
v
v
σ
ε
δ ε
=
+
+
−
,
(48)
a dla płaskiego stanu odkształcenia (PSO):
1
(1
)(1 2 )
ij
ij
ij
kk
E
vE
v
v
v
σ
ε
δ ε
=
+
+
+
−
,
(49)
gdzie E jest modułem Younga a v – stałą Poissona.
Zauważyć można, że związki konstytutywne (48) i (49) różnią się wyłącznie
współczynnikami określonymi przez stałe materiałowe. Przez podstawienie do (48)
zmodyfikowanych wartości stałych:
2
,
1
1
E
v
E
v
v
v
′
′
=
=
−
−
,
(50)
otrzymamy związek (49), a przez podstawienie do (49)
2
(1 2 )
,
(1
)
1
E
v
v
E
v
v
v
+
′
′
=
=
+
+
,
(51)
otrzymamy związek (48).
W przypadku wykorzystania w prawie Hooke’a modułu sprężystości postaciowej
2(1
)
E
G
v
=
+
i stałej Poissona, podstawienia (50) i (51) przejdą odpowiednio w (52) i (53):
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
23
,
1
v
v
G
G
v
′
′
=
=
−
,
(52)
,
1
v
v
G
G
v
′
′
=
=
+
.
(53)
Powyższe związki pozwalają na proste dostosowanie algorytmów numerycznych do realizacji
obliczeń zarówno dla PSN jak i PSO w zależności od określającego stan parametru
sterującego. Dalsze zależności przedstawiane będą dla płaskiego stanu odkształcenia.
Podstawiając (44) do (49) a następnie do (45) otrzymujemy przemieszczeniowe
równania różniczkowe Naviera:
,
,
0
1 2
j kk
k kj
j
G
Gu
u
X
v
+
+
=
−
.
(54)
Punktem wyjścia dla bezpośredniej metody elementów brzegowych są wzory
Somigliany. Wzory Somigliany wyprowadzić można ze znanego twierdzenia Bettiego o
wzajemności prac:
i
i
i
i
i
i
i
i
X u dV
p u dA
X u dV
p u dA
Ω
Γ
Ω
Γ
′
′
′
′
+
=
+
∫
∫
∫
∫
.
(55)
Twierdzenie to można wyrazić następująco:
Jeśli na ciało działają kolejno dwa układy obciążeń to praca pierwszego układu obciążeń
( , )
X p na przemieszczeniach wywołanych przez drugi układ ( )
u
′
jest równa pracy drugiego
układu obciążeń (
,
)
X p
′ ′
na przemieszczeniach wywołanych przez układ pierwszy ( )
u .
x
r
ξ
X = (x
ξ
i
i k
(k=1)
P (x
ξ
i
δ
x
2
x
1
δ
- )
(k)
, )
Rys. 12. Pomocniczy stan równowagi: siła w przestrzeni nieograniczonej
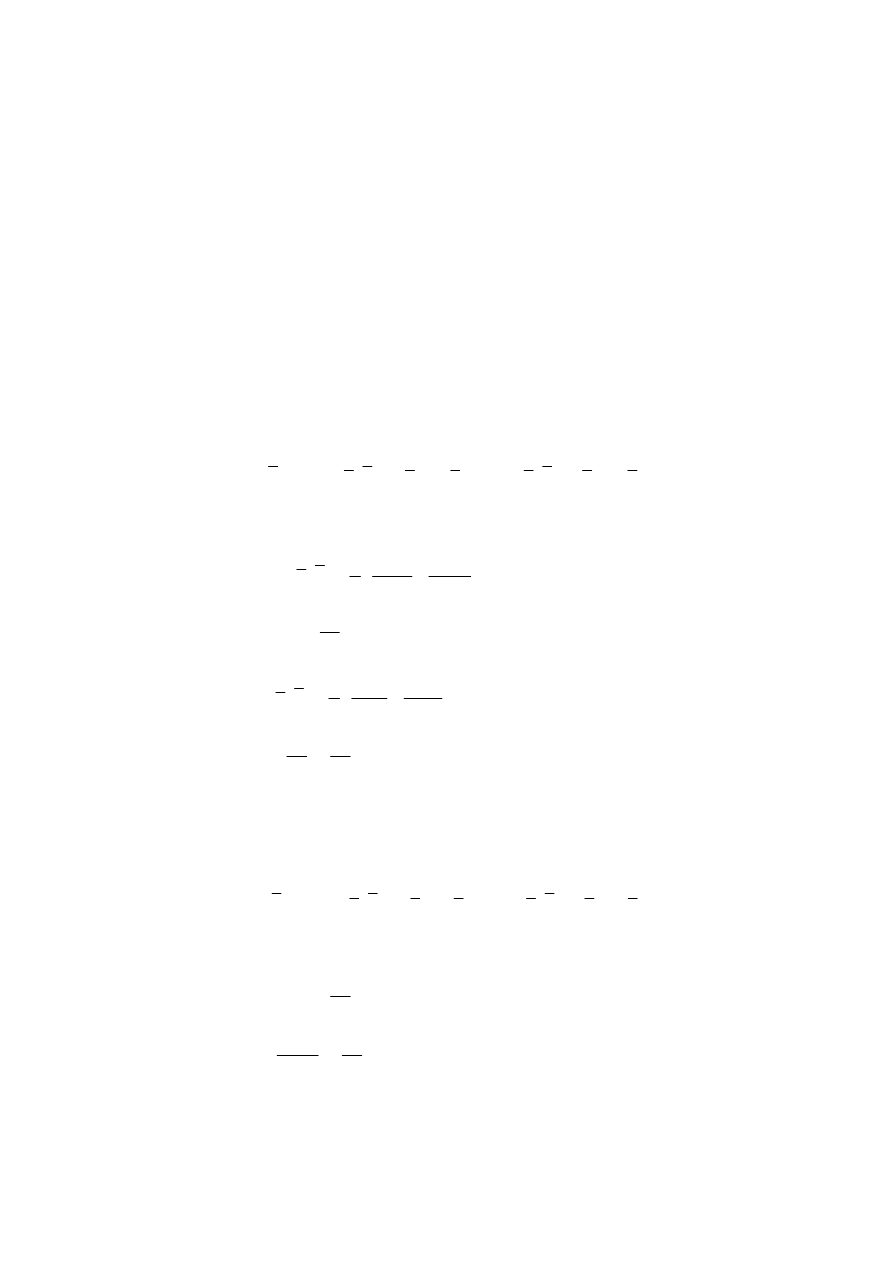
Aby otrzymać wzory Somigliany przyjmijmy, że dany jest układ obciążeń ciała p ,
X . Drugi stan równowagi konstruujemy wyodrębniając w nieograniczonej przestrzeni
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
24
sprężystej
∞
Ω
obszar
Ω
odpowiadający obszarowi zajmowanemu przez analizowane ciało
(rys. 12). W punkcie
ξ
∈Ω
przykładamy jednostkową, objętościową siłę skupioną X
′
o
kierunku k:
(
)
i
ik
X
x
δ
ξ δ
′ =
−
.
(56)
W powyższym wzorze (
)
x
δ
ξ
−
jest funkcją (dystrybucją) Diraca o własnościach:
( )
0,
0,
( )
,
0,
( ) (
)
( )
( ).
x
x
x
x
f x
x
d
x
f
σ
δ
δ
ξ
ξ
Ω
=
≠
→ ∞
=
−
Ω
=
∫
(57)
Wynika stąd, że
i
X
′
określone wzorem (56) jest wszędzie równe zeru poza punktem x
ξ
=
,
gdzie ma jedną składową (k) o wartości nieskończonej. Siłę określoną przez funkcję
i
X
′
możemy traktować jako siłę jednostkową, gdyż:
( )
i
ik
X dV x
δ
Ω
′
=
∫
.
(58)
Rozwiązanie układu równań przemieszczeniowych (54) dla takiej siły, z warunkiem
( )
0
u x
→
dla
x
→ ∞
, daje w rezultacie w przypadku płaskiego stanu odkształceń pole
tensorowe przemieszczeń [2]:
( )
( )
1
, ,
2
( , )
ln
k
i
i k
ik
U
x
C r r
C
r
ξ
δ
=
−
,
(59)
gdzie:
1
1
8
(1
)
C
G
v
π
=
−
,
2
3 4
C
v
= −
,
(
)
1/ 2
(
)(
)
i
i
i
i
r
x
x
ξ
ξ
=
−
−
,
,
i
i
i
r
r
r
x
r
∂
=
=
∂
,
i
i
i
r
x
ξ
= −
.
Funkcje
( )
k
i
U
nazywane są rozwiązaniami (funkcjami) fundamentalnymi Kelvina równań
elastostatyki lub funkcjami przemieszczeniowymi Greena dla przestrzeni nieograniczonej [4,
16].
Znajomość tensora przemieszczeniowego Greena (59) pozwala na określenie pola
naprężeń
( )
( )
,
k
ji
x
σ
ξ
i następnie obciążeń
( )
k
i
P
odpowiadających brzegowi
Γ
. Korzystając ze
związku (44) mamy:
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
25
(
)
(
)
( )
( )
( )
,
,
( )
1
2
2
2
1
,
2
2
4
(
1)
.
2
k
k
k
ij
i j
j i
i j k
k
ij
ij k
jk i
ik j
U
U
r r r
C
r
C
r
r
r
r
ε
ε
δ
δ
δ
=
+
=
−
−
−
+
(60)
Wyznaczony z prawa Hooke’a wzór określający składowe tensora naprężeń ma postać:
(
)
( )
3
4
2
2
2
i j k
k
ij
ij k
ik i
ik j
r r r
C
C
r
r
r
r
r
σ
δ
δ
δ
=
−
−
−
,
(61)
gdzie:
3
1
4 (1
)
C
v
π
=
−
,
4
1 2
C
v
= −
.
Mając dany tensor naprężeń odpowiadający przyłożeniu w punkcie
1
2
( ,
)
ξ
ξ ξ
=
siły
jednostkowej X
′
można wyznaczyć obciążenia linii konturu
Γ
:
( )
( )
( )
3
4
4
2
2
( , )
( , )
( ),
,
2
(
)
.
k
k
i
ij
j
k
i k
i
i k
k i
ik
l
l
P
x
x
n x
x
A
C
r r
P
C n r
n r
C
r n
r
r
ξ
σ
ξ
δ
=
∈
=
−
−
+
(62)
Wstawiając wyrażenia (59) i (62) do (55) otrzymujemy wzory Somigliany:
(
)
( )
( )
( )
( )
( )
( , )
( , ) ( )
( )
( , )
k
k
k
k
i
i
i
i
i
i
u
p x U
x
P
x
u x d
X x U
x
d
ξ
ξ
ξ
ξ
Γ
Ω
=
−
Γ +
Ω
∫
∫
(63)
Ze wzorów Somigliany wynika, że znając rozkład sił masowych
( )
i
X x oraz przemieszczenia
( )
i
u x i obciążenia
( )
i
p x brzegu ciała
Γ
możemy obliczyć przemieszczenia
k
u w dowolnym
punkcie wewnętrznym tego ciała
3
.
Praktyczne zastosowanie wzorów Somigliany stało się możliwe przez przeniesienie
punktu
ξ
(leżącego wewnątrz obszaru ciała i w którym określane jest przemieszczenie) na
brzeg ciała
Γ
. Można wykazać, że dla punktu
ξ
∈Γ
otrzymujemy
(
)
( )
( )
( )
( )
( )
( )
( , )
( )
( , )
( )
( )
( , )
( ),
k
k
kj
j
i
i
i
i
k
i
i
c
u
p x U
x
u x P
x
d
x
X x U
x
d
x
ξ
ξ
ξ
ξ
ξ
Γ
Ω
=
−
Γ
+
+
Ω
∫
∫
(64)
gdzie
kj
c zależy od kształtu konturu w punkcie
ξ
i od współczynnika Poissona.
Gdy brzeg w punkcie
ξ
jest gładki, lewa strona równania (64) ma postać
1
( )
2
k
u
ξ
.
3
Konieczność znajomości zarówno przemieszczeń
( )
i
u x jak i obciążeń
( )
i
p x brzegu dla zastosowania zasady
Somigliany powodowała, że przed rozwojem metody elementów brzegowych uważano, że „wzory Somigliany
mają jedynie teoretyczne znaczenie, bowiem na brzegu ciała mogą być znane albo przemieszczenia albo
obciążenia, ale każdy z tych typów warunków brzegowych oddzielnie” (Nowacki W., Teoria sprężystości)
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
26
W dalszych rozważaniach przyjmiemy
0
i
X
≡
. Siły masowe mogą być uwzględnione
w MEB. Jednak w takim przypadku wymagana jest pomocnicza dyskretyzacja obszaru by
obliczyć wartość trzeciej całki w równaniu (64). Przyjęcie odpowiedniej dyskretyzacji brzegu
i aproksymacji warunków brzegowych sprowadza zadanie rozwiązania równania (64) do
układu równań liniowych z niewiadomymi określającymi nieznaną część warunków
brzegowych. Po wykonaniu tego zadania można obliczać przemieszczenia, odkształcenia i
naprężenia w wybranych punktach wewnętrznych obszaru. Przemieszczenia obliczane są
bezpośrednio ze zdyskretyzowanych wzorów Somigliany (63).
Wyrażenia na składowe tensorów odkształcenia i naprężenia otrzymamy po
zróżniczkowaniu równania względem
i
ξ
i wykorzystaniu wzorów (44) i (49). Otrzymujemy
([2,4]):
( )
( , )
( )
( )
( , )
( )
( )
ij
kij
k
kij
k
A
x
p x d
x
B
x
u x d
x
ε ξ
ξ
ξ
Γ
Γ
=
Γ
−
Γ
∫
∫
,
(65)
gdzie:
(
)
( )
( )
1
, ,
,
2
,
,
1
( , )
,
2
2
4
(1
)(
) ,
2
i
j
k
k
kij
j
i
kij
ij jk
i
j
k
jk
i
ik
j
U
U
A
x
C
A
r
r r r
C
r
r
r
ξ
ξ
ξ
δ
δ
δ
∂
∂
=
+
∂
∂
= −
−
+ −
+
(66)
(
)
(
) (
)
}
( )
( )
3
,
,
,
, ,
,
2
4
, ,
,
,
,
,
,
1
( , )
,
2
2
4
2
2
,
i
j
k
k
kij
j
i
kij
ij
k
ik
j
jk
i
i
j
k
ik
j
jk
i
ij
k
i
j
k
k
j
i
k
i
j
P
P
B
x
C
r
B
r
v
r
r
r r r
r
n
C
n
n
n
r r n
v r r n
r r n
ξ
ξ
ξ
δ
δ
δ
δ
δ
δ
∂
∂
=
+
∂
∂
∂
=
+
+
−
+
∂
+
+
−
+
+
+
(67)
oraz
( )
( , )
( )
( )
( , )
( )
( )
ij
kij
k
kij
k
A
A
D
x
p x dA x
S
x
u x dA x
σ ξ
ξ
ξ
=
−
∫
∫
,
(68)
gdzie
(
)
3
4
,
,
,
, ,
,
2
kij
ik
j
jk
i
ij k
i
j
k
C
D
C
r
r
r
r r r
r
δ
δ
δ
=
+
−
+
,
(69)
(
)
(
)
(
)
(
)
(
)
3
,
,
,
, ,
,
2
, ,
,
,
,
,
2
2
1 2 )
(
4
1 2
2
4
1
2
.
kijh
ij
k
ik
jk
jk
i
i
j
k
i
j
k
ik
j
jk
i
ij
k
k
j
i
k
i
j
C G
r
S
v
r v
r
r
r r r
r
n
v
r r n
n
n
v
n
v r r n
r r n
δ
δ
δ
δ
δ
δ
∂
=
−
+
−
+
∂
+ −
+
+
+
−
+
+
+
(70)

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
27
We wzorach (3.21)÷(3.25)
,
i
i
i
i
i
i
x
r
r
r
r
x
r
r
ξ
ξ
−
∂
∂
=
= −
=
=
∂
∂
.
3.3. ALGORYTMY NUMERYCZNE MEB W DWUWYMIAROWYM
ZADANIU TEORII SPRĘŻYSTOŚCI
Najważniejsze elementy postępowania, jakie możemy wyróżnić w analizie metodą
elementów brzegowych to:
a)
Dyskretyzacja brzegu na elementy brzegowe. Przyjmijmy oznaczenia: LE – liczba
elementów brzegowych, LW – liczba węzłów konturu, LWE – liczba węzłów elementu
brzegowego.
b)
Przyjęcie funkcji modelujących przebieg przemieszczeń ( )
i
u i obciążeń (
)
i
p na
elemencie w zależności od ich wartości w punktach węzłowych,
c)
Przedstawienie związków (64) dla wszystkich punktów węzłowych jako układu 2· LW
równań liniowych typu
[ ]{ } [ ]{ }
P u
U
p
=
z nieznanymi 2· LW składowymi przemieszczeń i obciążeń węzłowych pozostałymi po
uwzględnieniu znanych warunków brzegowych,
d)
Rozwiązanie przekształconego układu równań
[ ]{ } { }
A x
b
=
a więc określenie nieznanych obciążeń i przemieszczeń w węzłach brzegowych,
e)
Obliczenie składowych tensora naprężeń na brzegu, odpowiadających znanym już
obciążeniom i przemieszczeniom,
f)
Obliczenie przemieszczeń i naprężeń w wybranych punktach wewnętrznych ze
zdyskretyzowanych wzorów (65) i (68).
Aproksymacja kształtu elementu, przemieszczeń i obciążeń określone mogą być wzorami
1
1
1
( )
( ) ( ),
( )
( ) ( ),
( )
( )
( ),
LWE
G
i
l
i
l
LWE
u
i
l
i
l
LWE
p
i
l
i
l
x
x l
u
u l
p
p l
η
ψ η
η
ψ η
η
ψ η
=
=
=
=
=
=
∑
∑
∑
(71)
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
28
gdzie LWE – jest liczbą węzłów elementu,
η
– lokalną współrzędną określającą położenie na
linii elementu (
1,1 )
η
∈< −
>
,
( )
i
x l ,
( )
i
u l ,
( )
i
p l oznaczają współrzędne, przemieszczenia i
obciążenia węzła l a
ψ
∗
∗
są założonymi z góry funkcjami modelującymi. Zazwyczaj
przyjmuje się ten sam sposób aproksymacji wszystkich przybliżanych funkcji:
,
1, 2.
G
u
P
l
l
l
l
l
ψ
ψ
ψ
ψ
=
=
=
=
η = 1
1
2
η = −1
η
n
Ψ = 1
2
Ψ = 1
1
Ψ = ( 1−η)
Ψ = ( 1+η)
η −1,1
1
2
1
2
1
2
Rys. 13. Liniowy element brzegowy
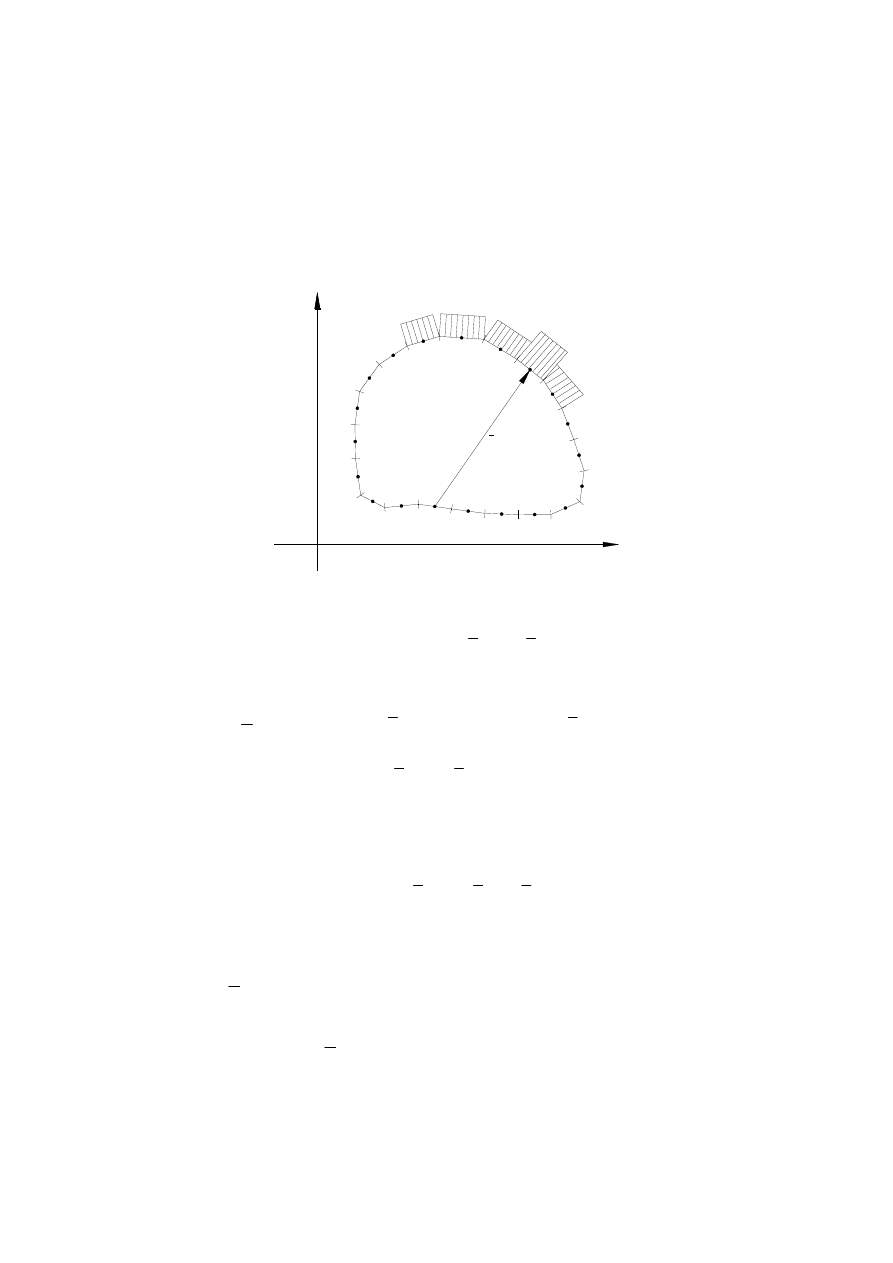
Rysunek 13 ilustruje przypadek, gdy funkcje
l
ψ
są liniowe. W takim przypadku równanie
(64) dla wybranego węzła
j
M konturu przybiera postać
( )
( )
1
(
) (
)
(
( )
( ,
)
( ,
)
( )
l
LE
k
k
ki
j
i
j
i
i
j
i
i
j
l
l
L
c
M u M
p x U
x M
u P
x M dL x
=
=
−
∑ ∫
,
(72)
gdzie LE jest liczbą elementów konturu a
l
L oznacza l-ty element konturu (rys. 13).
Po uwzględnieniu związków (71) i odpowiednich przekształceniach mamy:
(
)
(
)
(
)
}
1
1
2
1
1
1
1
1
2
1
1
(
)
( )
(
)
( )
(
)
( ),
( )
( ) (
)
( ) (
)
( ( ),
)
( )
LE
k
ki
i
j
i
l
i
l
i
j
l
k
i
l
i
l
i
j
c u M
p M
p M
U
x
M
J
d
u M
u M
P x
M
J
d
ψ η
ψ η
η
η η
ψ η
ψ η
η
η η
+
=
+
−
=
+
+
−
+
∑ ∫
∫
(73)
gdzie
( )
J
η
jest jakobianem przejścia z układu
1 2
x x
na zmienną
η
. Dla przypadku elementu
liniowego jest
( )
2
j
l
J
η
=
, gdzie
j
l oznacza długość elementu j.
Po dalszych przekształceniach równanie (73) można doprowadzić do postaci:
(
)
( )
(
)
( )
( )
( )
1
1
(
)
,
,
LW
LW
k
k
ki
i
j
i
n
j
i
n
i
n
j
i
n
n
n
c u M
U
M M
p M
P
M M
u M
=
=
=
∆
−
∆
∑
∑
(74)

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
29
gdzie LW jest liczbą węzłów konturu a współczynniki
(
)
( )
,
k
i
n
j
U
M M
∆
i
(
)
( )
,
k
i
n
j
P
M M
∆
są
wynikiem odpowiednich całkowań w związku (73). Całkowania te przeprowadzane są
numerycznie. Dla
j
n
=
całki składające się na
(
)
(
)
( )
( )
,
,
k
k
i
n
j
i
j
j
U
M M
U
M M
∆
= ∆
i zawierające osobliwości funkcji podcałkowych obliczane są ze wzorów analitycznych a
całki składające się na
(
)
(
)
( )
( )
,
,
k
k
i
n
j
i
j
j
P
M M
P
M M
∆
= ∆
obliczane są łącznie ze
współczynnikami
ki
c w dalszym etapie z warunku ruchu ciała jako bryły sztywnej.
Zapisując związek (74) w postaci macierzowej otrzymamy
(1)
(1)
(1)
1
1
2
1
1
11
(2)
(2)
(2)
1
1
2
1
1
21
(
,
)
(
,
)
(
,
)
(
)
(
,
)
(
,
)
(
,
)
(
)
j
j
j
j
j
j
j
j
j
j
P
M M
P
M M
P
M M
c
M
P
M M
P
M M
P
M M
c
M
∆
∆
∆
+
∆
∆
∆
+
……
……
1
1
2
1
(1)
(1)
(1)
1
2
12
1
2
(2)
(2)
(2)
2
2
22
1
2
1
2
(
)
(
)
(
)
(
,
)
(
)
(
,
)
(
,
)
(
)
(
,
)
(
)
(
,
)
(
,
)
(
)
(
)
j
j
j
j
LW
j
LW
j
j
j
j
j
LW
j
LW
j
LW
LW
u M
u M
u M
P
M M
c
M
P
M
M
P
M
M
u M
P
M M
c
M
P
M
M
P
M
M
u M
u M
∆
+
∆
∆
=
∆
+
∆
∆
⋮
……
……
⋮
(1)
(1)
(1)
(1)
1
1
2
1
1
1
2
(2)
(2)
(2)
(2)
1
1
2
1
1
1
2
(
,
)
(
,
)
(
,
)
(
,
)
(
,
)
(
,
)
(
,
)
(
,
)
j
j
j
j
j
j
j
j
j
j
U
M M
U
M M
U
M M
U
M M
U
M M
U
M M
U
M M
U
M M
∆
∆
∆
∆
∆
∆
∆
∆
……
…
……
…
1
1
2
1
(1)
(1)
1
1
2
(2)
(2)
2
1
2
1
2
(
)
(
)
(
)
(
,
)
(
,
)
(
)
(
,
)
(
,
)
(
)
(
)
j
LW
j
LW
j
j
LW
j
LW
j
LW
LW
p M
p M
p M
U
M
M
U
M
M
p M
U
M
M
U
M
M
p M
p M
∆
∆
∆
∆
⋮
…
…
⋮
(75)
Związek ten stanowi układ dwóch równań z 2 LW
⋅
niewiadomymi sformułowany dla węzła
j
M (rys. 14). Niewiadomymi jest część elementów wektora
{ }
u
i część elementów
wektora
{ }
p
. Jeśli warunek brzegowy dotyczy przemieszczenia znane jest
i
u a niewiadomą
stanowi
i
p a jeśli znane jest obciążenie
i
p do wyznaczenia zostaje
i
u .
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
30
x
x
2
1
M ( )
M
M
M
x
n
η
j
l-1
l
l+1
L
i
r ( , )
x
ξ
ξ
Rys. 14. Sposób przeprowadzania całkowania po konturze
Formułując analogiczne związki dla pozostałych węzłów otrzymujemy układ 2 LW
⋅
równań
z 2 LW
⋅
niewiadomymi:
[ ]
{ }
[ ]
{ }
P u
U
p
=
.
(76)
Uwzględniając, że warunki brzegowe zadania określają nam 2 LW
⋅
wartości składowych
wektorów
{ }
u
i
{ }
p
równanie (76) można przekształcić do postaci:
[ ]
{ } { }
A
y
b
=
,
(77)
gdzie
{ }
y
zawiera nieznane wartości węzłowe przemieszczeń i obciążeń.
Dla modelowania nieciągłości obciążeń na brzegu wprowadza się tzw. węzły podwójne
(rys. 15). Węzeł podwójny stanowią dwa węzły o identycznych współrzędnych, w których
niezależnie określane są obciążenia
i
p a przemieszczenia z założenia są identyczne.
k+3
k+2
k+1,k
k-1
P
Rys. 15. Węzeł podwójny (k+1,k) na konturze analizowanego obszaru
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
31
Określenie, po rozwiązaniu układu równań (77), wszystkich składowych obciążeń i
przemieszczeń węzłowych pozwala na łatwe wyznaczenie stanu naprężeń w węzłach
brzegowych. Naprężenia obliczane są w układzie lokalnym
1
2
,
x x
′ ′
związanym z elementem
brzegowym (rys. 16). Tak na przykład dla węzła n mamy
11
1
2
12
1
2
( ) cos
( ) sin ,
( ) sin
( ) cos .
p n
p n
p n
p n
σ
α
α
σ
α
α
′ =
+
′ = −
+
(78)
Naprężenie normalne w kierunku stycznym do brzegu obliczamy wykorzystując definicje
odkształceń i prawo Hooke’a (44) i (49):
2
22
11
2
2
1
1
E
u
v
v
x
v
σ
σ
∂
′
′
=
+
′
−
∂
−
.
(79)
Uwzględniając, że przemieszczenie jest zmienne liniowo wzdłuż elementu możemy zapisać
2
2
22
11
2
(
1)
( )
( )
( )
1
1
1
E
u n
u n
v
n
n
v
v
σ
σ
′
′
+ −
′
′
=
+
−
+
.
(80)
Otrzymane składowe stanu naprężenia transformowane są następnie do układu globalnego
1
2
,
x x
.
x
x
2
1
α
22
σ
22
σ
11
σ
12
σ
'
'
'
'
11
σ
'
x
2
x
1
'
'
n+2
n+1
n-1
Rys. 16. Wyznaczanie naprężeń w węzłach konturu
Dla każdego węzła naprężenia liczone są dwukrotnie przy wykorzystaniu wyników z
obu elementów zawierających dany węzeł. Końcowe naprężenia w węźle stanowią średnią
arytmetyczną z rezultatów otrzymanych dla obu elementów.
Określenie naprężeń brzegowych kończy zwykle proces obliczeń. W dowolnym,
wybranym punkcie wewnętrznym można jednak określić przemieszczenie i naprężenia
bezpośrednio za pomocą wzorów (63) i (68). Wzory te są dyskretyzowane zgodnie z
opisanymi powyżej zasadami. Odpowiedni algorytm automatyzujący określenie siatki
punktów wewnętrznych może umożliwiać otrzymywanie rozwiązania dla całego
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
32
analizowanego obszaru. Schemat działania typowego programu metody elementów
brzegowych dla dwuwymiarowych zadań teorii sprężystości przedstawia rys. 17.
1. Wprowadzenie informacji o geometrii
konturu, warunkach brzegowych i stałych
materiałowych.
2. Interakcyjna prezentacja graficzna danych.
3. Budowa układu równań.
4. Rozwiązanie układu równań.
5. Obliczanie naprężeń brzegowych.
6. Interakcyjna prezentacja graficzna wyników.
7. Obliczenia dla wybranych punktów
wewnętrznych lub dla automatycznie
wygenerowanej siatki punktów
wewnętrznych.
8. Prezentacja izolinii wybranych wielkości.
Rys. 17. Schemat podstawowych działań w programie MEB dla dwuwymiarowych zagadnień
teorii sprężystości
P
RZYKŁAD
4
Rura grubościenna
Analizie poddano zagadnienie płaskiego stanu odkształceń przedstawione na rys. 18.
a = 1 10 m
b = 2.5 10 m
E = 2 10 MPa
= 0.3
p = 100 MPa
-2
5
-2
o
a
b
C
D
E
F
A
p
B
o
ν
x
2
x
1
Rys. 18. Rura grubościenna poddana ciśnieniu wewnętrznemu (przekrój)
Obliczenia przeprowadzono dla fragmentu ABCD obszaru przyjmując symetryczne warunki brzegowe na odcinkach AB
1
(
0)
u
=
i CD
2
(
0)
u
=
. Przyjęto trzy stopnie dyskretyzacji w modelu numerycznym MEB: 18 elementów brzegowych
(A), 36 elementów brzegowych (B) i 72 elementy brzegowe (C). Wyniki obliczeń komputerowych (naprężenia zredukowane
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
33
Hubera-Misesa
red
σ
i przemieszczenia promieniowe
r
u
w punktach E i F) porównano z wynikami rozwiązania ścisłego, w
którym mamy:
(
)
(
)
2
2
0
2
2
( )
1 2
1
r
p
ab
r
b
u
r
v
v
v
b
a
E
b
r
=
=
−
−
+ +
−
,
1
4
2
2
0
2
2
( )
3
1 4 (1
)
red
a
b
r
p
v
v
b
a
r
σ
=
+ −
−
−
.
Otrzymane rezultaty prezentuje tablica 1.
Tablica 1.
Przykład 4 – wyniki obliczeń
( )
red
E
σ
[MPa]
( )
red
F
σ
[MPa]
( )
r
u E
4
[10
m]
−
( )
r
u F
4
[10
m]
−
A
211,6
32,7
0,845
0,453
B
209,0
33,6
0,831
0,441
C
207,2
33,8
0,826
0,435
Wartości
dokładne
206,3
33,9
0,823
0,443
Rysunek 19 prezentuje przyjęty podział brzegu i obraz rozkładu naprężeń zredukowanych na konturze dla przykładu C.
Rys. 19. Rura grubościenna pod ciśnieniem wewnętrznym – dyskretyzacja i rozkład
naprężenia zredukowanego Hubera-Misesa na konturze analizowanego obszaru
Metoda elementów brzegowych rozwijała się najbardziej intensywnie w latach
siedemdziesiątych i osiemdziesiątych ubiegłego wieku. Duże nadzieje wiązano z nią głównie
z powodu możliwości ograniczenia dyskretyzacji jedynie do brzegu (konturu) ciała. Dzięki
temu w porównaniu do MRS i MES dyskretny model obliczeniowy MEB opisany może być
przez znacznie mniejszą liczbę niewiadomych. Tak na przykład podział sześcianu określony
przez siatkę n
x
n
x
n=n
3
węzłów w metodach obszarowych (MRS i MES) odpowiada liczbie
2
6
12
8
n
n
−
+
węzłów w metodzie elementów brzegowych. Jeśli przyjmiemy
40
n
=
mamy
odpowiednio 64000 węzłów w porównaniu do 9128 . Korzyści z dyskretyzacji jedynie brzegu
są jednak znacznie mniejsze dla obszarów wielospójnych lub obszarów o złożonym kształcie.

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
34
Dodatkowo należy pamiętać, że macierz układu równań MEB jest niesymetryczna i pełna,
więc rozwiązanie wymaga znacznie większej liczby operacji arytmetycznych niż w MRS lub
MES, gdzie mamy do czynienia z macierzami pasmowymi i zwykle również symetrycznymi.
Algorytmy numeryczne MEB są znacznie bardziej złożone niż dwóch pozostałych
metod i nie wykazują uniwersalizmu, ułatwiającego różnorodność zastosowań. W rezultacie
metoda elementów brzegowych nie znalazła takiej popularności w praktyce obliczeniowej jak
MES czy nawet MRS. Stosowana zwykle jest w analizie takich zagadnień, gdzie ograniczenie
dyskretyzacji do brzegu ma szczególne znaczenie, na przykład w analizie problemów
kontaktowych, obliczaniu współczynników koncentracji naprężeń i analizie obszarów o
zmiennym kształcie. Szersze informacje na temat zastosowań metody elementów brzegowych
w mechanice konstrukcji znaleźć można na przykład w pracy [5].
Dominująca obecnie w zastosowaniach inżynierskich jest jednak metoda elementów
skończonych, która dzięki swym zaletom, a głównie prostocie i uniwersalizmowi
algorytmów, stała się powszechnie używanym narzędziem w analizie i projektowaniu
konstrukcji inżynierskiej.
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
35
4. KONCEPCJA METODY ELEMENTÓW SKOŃCZONYCH
NA PRZYKŁADZIE RÓWNANIA POISSONA
MES opiera się na podziale analizowanego obszaru na typowe, małe podobszary nazywane elementami
skończonymi. Wewnątrz każdego elementu skończonego poszukiwane funkcje przybliżane są za pomocą z góry
założonych funkcji aproksymujących nazywanych funkcjami kształtu.
Koncepcję metody przeanalizujemy na przykładzie równania Poissona (33). Wykazać można, że rozwiązanie
równania (33) z warunkami brzegowymi (34) jest równoważne rozwiązaniu zadania minimalizacji funkcjonału
2
2
1
2
0
1
2
1
( )
2 ( ,
)
,
2
q
u
u
I u
f x x u d
q ud
x
x
Ω
Γ
∂
∂
=
+
−
Ω −
Γ
∂
∂
∫
∫
(81)
gdzie funkcja u spełnia warunek Dirchleta
0
( )
,
u x
u
=
u
x
∈Γ
(82)
W metodzie elementów skończonych dyskretyzacja prowadzi do zamiany zadania minimalizacji funkcjonału
(81) na zadanie minimalizacji funkcji wielu zmiennych.
obszar
kontur
e
w
ę
zły
elementy
x
2
x
1
2
1
u(x ,x )
2
x
x
1
u
1
u
2
u
3
u
8
u
7
u
6
u
5
u
4
e
1
2
3
4
5
6
7
8
LWE=8
Rys. 20. Podział obszaru analizy
Ω
na elementy skończone i aproksymacja analizowanej funkcji wewnątrz
elementu za pomocą wartości węzłowych.
W tym celu dzielimy obszar
Ω
na elementy
i
Ω
(rys. 20)
1
LE
e
i
=
Ω = Ω
∪
i
0
i
j
Ω Ω =
∩
j
i
≠
,
(83)
gdzie LE oznacza liczbę elementów skończonych w obszarze
Ω
.
Zakładamy, że wartość funkcji poszukiwanej
( )
u x
w dowolnym punkcie wewnętrznym każdego elementu
możemy określić za pomocą jej wartości w węzłach tego elementu zgodnie z formułą
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
36
1
2
1
2
1
( ,
)
( ,
)
LWE
i
i
i
u x x
N x x u
=
=
∑
(84)
gdzie
LWE oznacza liczbę węzłów elementu,
i
u
, i = 1,...,LWE są wartościami poszukiwanej funkcji w węzłach,
N
i
(x
1
,x
2
) są założonymi z góry funkcjami aproksymującymi, tak zwanymi funkcjami kształtu.
Elementy skończone łączą się ze sobą w węzłach, dzięki czemu zachowana może być ciągłość analizowanej
funkcji na granicach między elementami. Funkcje kształtu N
i
z reguły definiowane są w lokalnych układach
współrzędnych, związanych z węzłami elementu, dzięki czemu ich postać jest uniezależniona od wielkości
elementu i usytuowania jego węzłów.
Wartość funkcjonału po dyskretyzacji obszaru można przedstawić jako:
2
2
1
2
0
1
1
1
2
1
( )
2 ( ,
)
2
i
j
LE
LK
i
j
i
j
u
u
I u
f x x u d
q ud
x
x
=
=
Ω
Γ
∂
∂
≅
+
−
Ω −
Γ
∂
∂
∑
∑
∫
∫
(85)
gdzie LK oznacza liczbę krawędzi elementów leżących na części
q
Γ
konturu, a funkcja u określona jest w
każdym podobszarze
i
Ω
przez związki typu (84).
Wewnątrz każdego elementu, zgodnie z (84) mamy:
1
1
1
1
2
2
,
.
LWE
i
i
i
LWE
i
i
i
N
u
u
x
x
N
u
u
x
x
=
=
∂
∂ =
∂
∂
∂
∂ =
∂
∂
∑
∑
(86)
Po podstawieniu (86) do (85) i po przeprowadzeniu całkowania
( )
I u
staje się funkcją wartości węzłowych
,
1, 2,...,
i
u
i
LW
=
, gdzie LW oznacza liczbę węzłów podzielonego obszaru.
Jeśli funkcję tę przedstawimy w postaci macierzowej otrzymamy:
11
12
13
1
1
1
21
22
23
2
2
31
32
1
2
3
1
2
3,
3
3
1
1
( )
,
,
,...,
,
,
,
2
LW
LW
LW
LW
LW LW
LW
LW
k
k
k
k
u
b
k
k
k
u
b
k
k
I u
u u u
u
u u u
u
u
b
k
k
u
b
≈
−
…
…
…
…
…
Związek ten można zapisać w skróconej formie:
[ ]
{ }
{ }
1
1
1
1
1
2
LW
LW
LW
LW
LW LW
I
u
u
u b
K
×
×
×
×
×
≈
−
.
(87)
Indeksy na dole poszczególnych symboli oznaczają wymiary wektorów i macierzy.
Warunkiem koniecznym minimum tej funkcji jest zerowanie się jej wszystkich pochodnych cząstkowych:
0
i
I
u
∂ =
∂
,
1,
,
i
LW
=
…
.
(88)
Otrzymamy stąd
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
37
[ ]
{ } { }
K
u
b
=
,
(89)
czyli układ liniowych z nieznanym wektorem wartości węzłowych funkcji
u
. Przed rozwiązaniem tego układu
należy uwzględnić jeszcze znane z brzegowego warunku Dirchleta niektóre wartości
i
u
.
Po rozwiązaniu układu otrzymujemy wszystkie wartości węzłowe
i
u
. Możemy wtedy wyznaczyć przybliżone
wartości funkcji
u
i jej pochodnych wewnątrz każdego elementu korzystając ponownie ze związków (84) i (86).
Macierz
[ ]
K
jest macierzą symetryczną, dodatnio określoną, pasmową (rys. 21).
zerowe
elementy
LW - liczba stopni swobody
m - szeroko
ść
półpasma macierzy
LW
m
Rys. 21. Symetryczna macierz układu równań MES
Szerokość półpasma m macierzy
[ ]
K
zależy od przyjętej w wektorze
{ }
u
numeracji węzłów obszaru. Zwykle
możemy tak zmienić numerację aby uzyskać
m
LW
<<
.
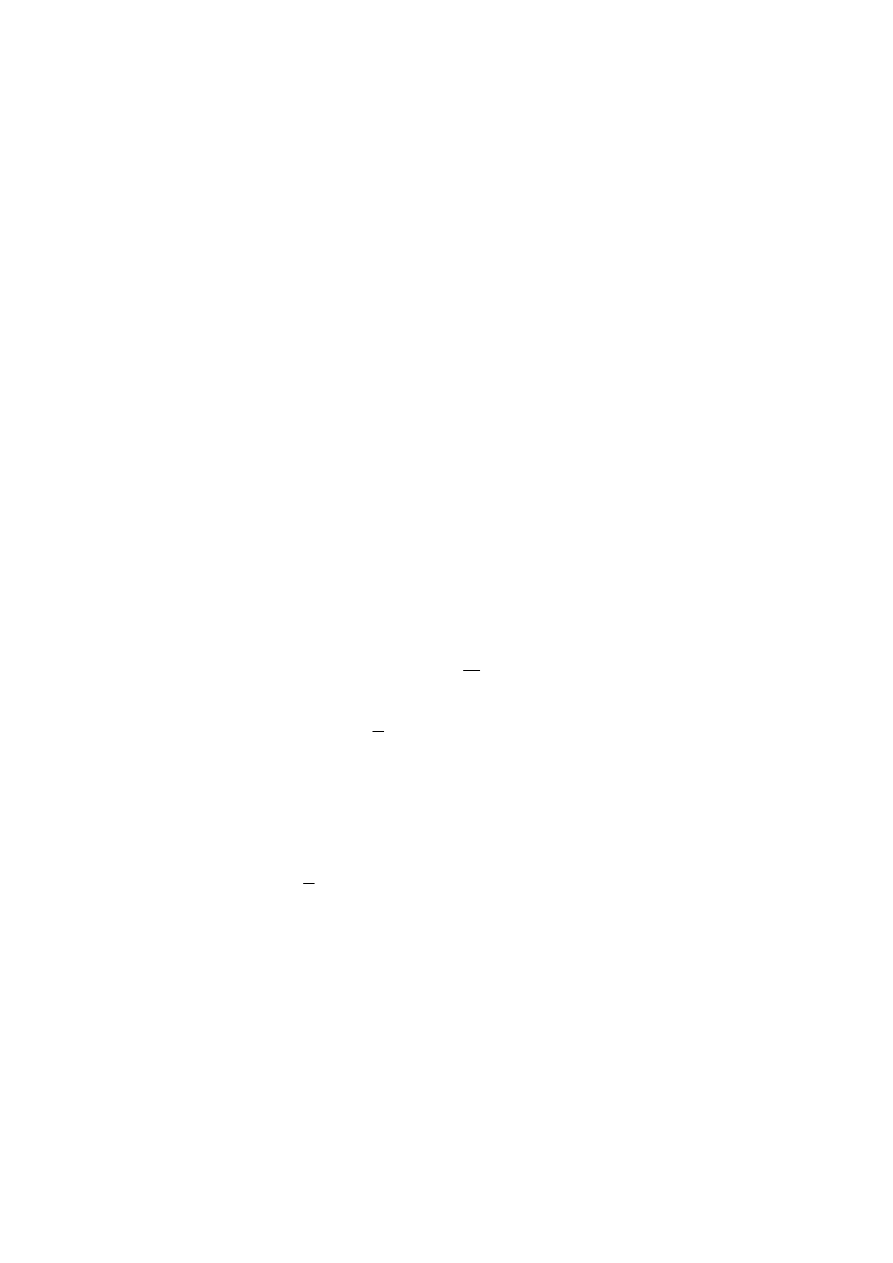
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
38
5.
MES W ANALIZIE KONSTRUKCJI PRĘTOWYCH
Metoda elementów skończonych w statyce konstrukcji przedstawiana zwykle jest jako
metoda przybliżona wykorzystująca twierdzenie o minimum całkowitej energii potencjalnej
układu odkształcalnego.
Całkowita energia potencjalna (V) jest różnicą energii potencjalnej odkształcenia sprężystego (U) i energii
potencjalnej obciążeń zewnętrznych (-
z
W
), gdzie
z
W
nazywane jest pracą obciążeń zewnętrznych
min!
z
V
U
W
= −
=
,
(90)
Całkowita energia potencjalna jest funkcjonałem, którego argumentem jest funkcja opisująca przemieszczenia
ciała odkształcalnego. Pod wpływem obciążenia w ciele powstaje takie pole przemieszczeń, dla którego V
przyjmuje wartość minimalną. Wówczas układ odkształcalny pozostaje w stanie równowagi.
Funkcje opisujące pole przemieszczeń muszą dodatkowo spełniać przemieszczeniowe warunki brzegowe.
Wówczas warunek minimum całkowitej energii potencjalnej jest warunkiem koniecznym i dostatecznym
równowagi sprężystego ustroju odkształcalnego poddanego obciążeniu zewnętrznemu.
Prezentację metody elementów skończonych zaczniemy od konstrukcji belkowych, należących do
najprostszych prętowych elementów konstrukcyjnych.
5.1.
BELKI
W przypadku belek obciążonych obciążeniem ciągłym
N
m
p
całkowitą energię potencjalną określa wzór:
2
0
0
1
(
)
2
l
l
V
EI w
dx
pwdx
′′
=
−
∫
∫
,
(91)
gdzie w(x) jest funkcją ugięcia belki o długości l.
W przypadku występowania dodatkowych obciążeń skupionych w postaci sił
i
P
i momentów sił
i
M
wzór (91)
przyjmie postać
2
0
0
1
(
)
2
l
l
i
i
j
j
i
j
V
EI w
dx
pwdx
Pw
M
θ
′′
=
−
−
−
∑
∑
∫
∫
(92)
gdzie
i
w
i
j
θ
oznaczają odpowiednio przemieszczenie w punkcie przyłożenia siły
i
P
i kąt ugięcia w punkcie
przyłożenia momentu siły
j
M
.
Metoda elementów skończonych jest przybliżoną metodą znajdowania minimum funkcjonału V i ma wiele
wspólnego ze znaną od dawna metodą Ritza.
Przypomnijmy najpierw schemat postępowania w metodzie Ritza:
1. Linię ugięcia opisujemy za pomocą rozwiązania przybliżonego

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
39
1
( )
( )
n
i
i
i
w x
a
x
ϕ
=
=
∑
ɶ
,
(93)
gdzie a
i
są nieznanymi parametrami, a
i
ϕ
są z góry założonymi funkcjami.
Funkcje
i
ϕ
muszą być liniowo niezależne, to znaczy żadna z nich nie może być kombinacją liniową
pozostałych a
)
(
~ x
w
spełniać powinna przemieszczeniowe warunki brzegowe (dotyczą one
poszukiwanej funkcji przemieszczeń i jej pochodnych do rzędu o 1 mniejszego niż największy rząd
pochodnej funkcji poszukiwanej w minimalizowanym funkcjonale)
2. Podstawiamy
)
(
~ x
w
do funkcjonału całkowitej energii potencjalnej (92). Otrzymujemy energię
potencjalną jako funkcję nieznanych parametrów
n
a
a
a
…
,
,
2
1
.
3. Warunek minimum funkcjonału zastępujemy przez warunek minimum funkcji wielu zmiennych
0
i
V
a
∂ =
∂
,
1,...,
i
n
=
.
(94)
Ponieważ V jest funkcją kwadratową, dodatnio określoną, to warunek (94) jest wystarczający dla
wyznaczenia minimum.
Warunek minimum (94) stanowi układ n równań liniowych z niewiadomymi
n
a
a
a
…
,
,
2
1
.
4. W wyniku rozwiązania układu (94) otrzymujemy wartości parametrów a
i
, które jednocześnie
określają otrzymane rozwiązanie przybliżone (93).
Stąd łatwo wyznaczyć przebieg momentu gnącego i siły tnącej
( )
( ),
( )
( ).
q
M
x
EIw x
T x
EIw x
′′
=
′′′
= −
ɶ
ɶ
ɶ
ɶ
(95)
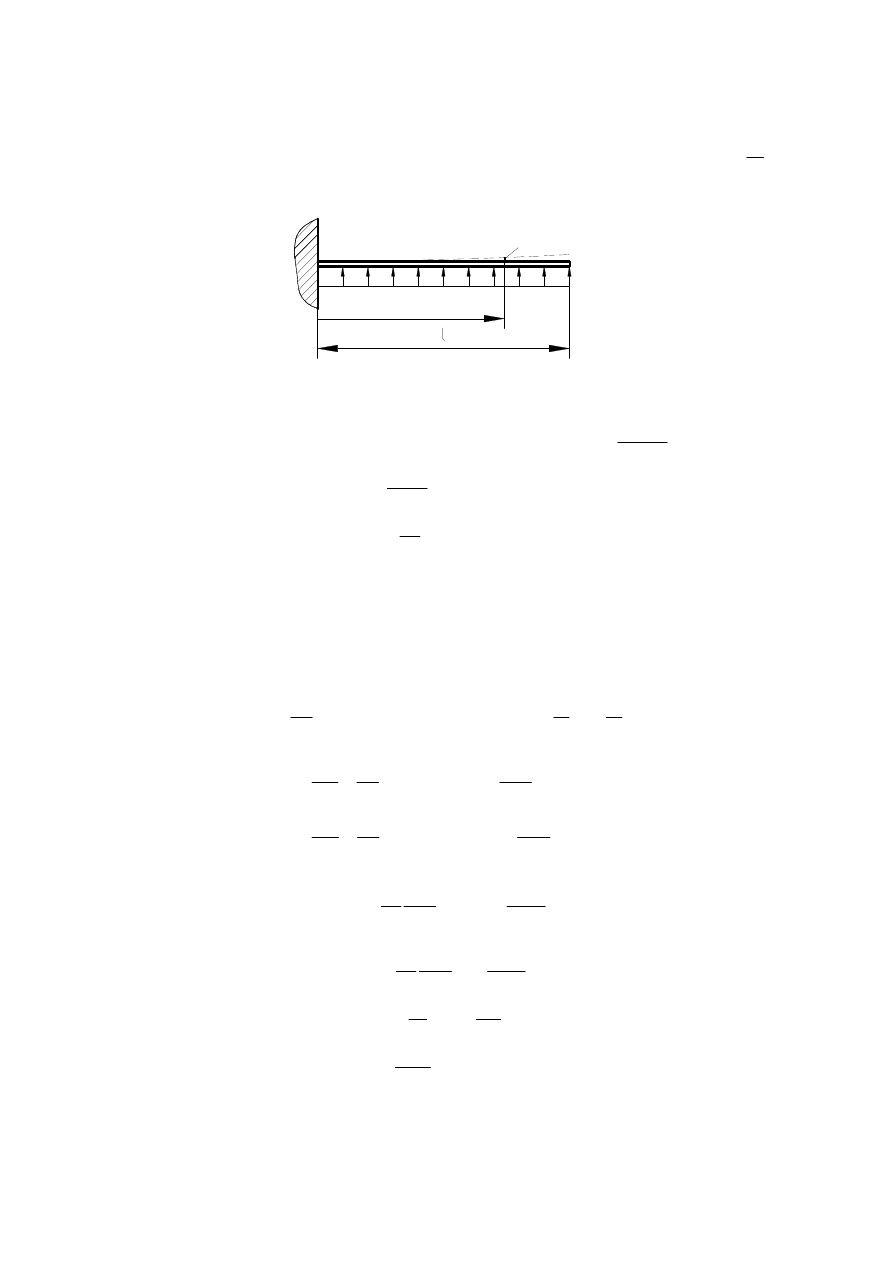
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
40
P
RZYKŁAD
5.
Porównać rozwiązanie ścisłe dla belki wspornikowej (rys. 22) o długości
l obciążonej stałym rozkładem sił
0
N
p
m
z
rozwiązaniem metodą Ritza zakładając, że
3
4
2
3
2
1
)
(
~
x
a
x
a
x
a
a
x
w
+
+
+
=
.
w(x)
p
0
x
Rys. 22. Belka wspornikowa obciążona obciążeniem ciągłym p
0
[N/m] (przykład 5)
Rozwiązanie
Rozwiązanie ścisłe, otrzymane na przykład z całkowania równania różniczkowego
( )
( )
g
M
x
w x
EI
′′
=
ma postać:
2
2
2
0
2
0
0
( )
(6
4
)
,
24
( )
(
) ,
2
( )
(
).
q
p
w x
l
lx
x x
EI
p
M
x
l
x
T x
p l
x
=
−
+
=
−
= −
−
(96)
Funkcja przybliżona
w
ɶ
powinna spełniać warunki brzegowe:
(
0)
0,
w x
= =
ɶ
(
0)
0
w x
′ = =
ɶ
.
(97)
Stąd otrzymamy
3
4
2
3
)
(
~
x
a
x
a
x
w
+
=
.
(98)
Całkowita energia potencjalna V , zgodnie ze wzorem (92) jest równa:
)
4
3
(
)
12
12
4
(
2
4
4
3
3
3
2
4
2
4
3
2
3
l
a
l
a
p
l
a
l
a
a
l
a
EI
V
+
−
+
+
=
.
(99)
Warunek minimum przyjmie postać:
(
)
(
)
3
2
0
3
4
3
4
2
3
0
3
4
4
8
12
0,
2
3
12
24
0.
2
4
p l
V
EI
la
l a
a
p l
V
EI
l a
l a
a
∂ =
+
−
=
∂
∂ =
+
−
=
∂
(100)
Stąd
2
0
0
3
4
5
,
24
12
p l
p l
a
a
EI
EI
=
= −
(101)
Rozwiązaniem przybliżonym jest więc
2
2
3
0
0
2
0
0
0
5
( )
,
24
12
5
( )
,
12
2
( )
.
2
q
p l
p
w x
x
x
EI
EI
p l
M
x
p l
x
p l
T x
=
−
=
−
−
=
ɶ
ɶ
ɶ
(102)
Porównanie rozwiązania ścisłego i przybliżonego przedstawione jest na rys. (23).
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
41
x
W(x)
x
W(x)
~
l
l
4
2
l
4
3l
10
-2
pl
EJ
1.318
1.172
4.427
8.35
12.5
12.5
8.203
4.167
W(x)
~
W(x)
M (x)
M (x)
~
g
g
4
l
2
l
4
3l
l
0.417
0.5
0.292
0.167
0.42
-0.083
0.281
0.125
0.031
pl
*
2
*
T(x)
~
T(x)
pl
*
x
4
l
2
l
4
3l
l
g
M (x)
~
M (x)
g
0.5
1
T(x)
T(x)
~
Rys. 23. Rozwiązanie ścisłe i przybliżone dla zadania belki wspornikowej (przykład 5)
Wykresy na rys. 23 wskazują, że rozwiązanie przybliżone
w
ɶ
jest bardzo bliskie rozwiązaniu ścisłemu
( )
w x
.
Dokładność rozwiązania przybliżonego jest gorsza, gdy porównamy
( )
g
M
x
i
( )
q
M
x
ɶ
, a zupełnie
niezadowalająca w przypadku porównania rozkładu sił tnących
( )
T x
i
( )
T x
ɶ
. Taka cecha rozwiązania
przybliżonego jest charakterystyczna dla wielu metod przybliżonych, także dla MES. Kolejne pochodne funkcji
aproksymującej są w metodach przybliżonych coraz bardziej odległe od odpowiednich pochodnych w
rozwiązaniu ścisłym.
Rozwiązanie metodą elementów skończonych przebiega w sposób podobny do przyjętego w metodzie
Ritza. Zasadnicza różnica polega na innej koncepcji doboru funkcji aproksymujących. W metodzie Ritza mamy
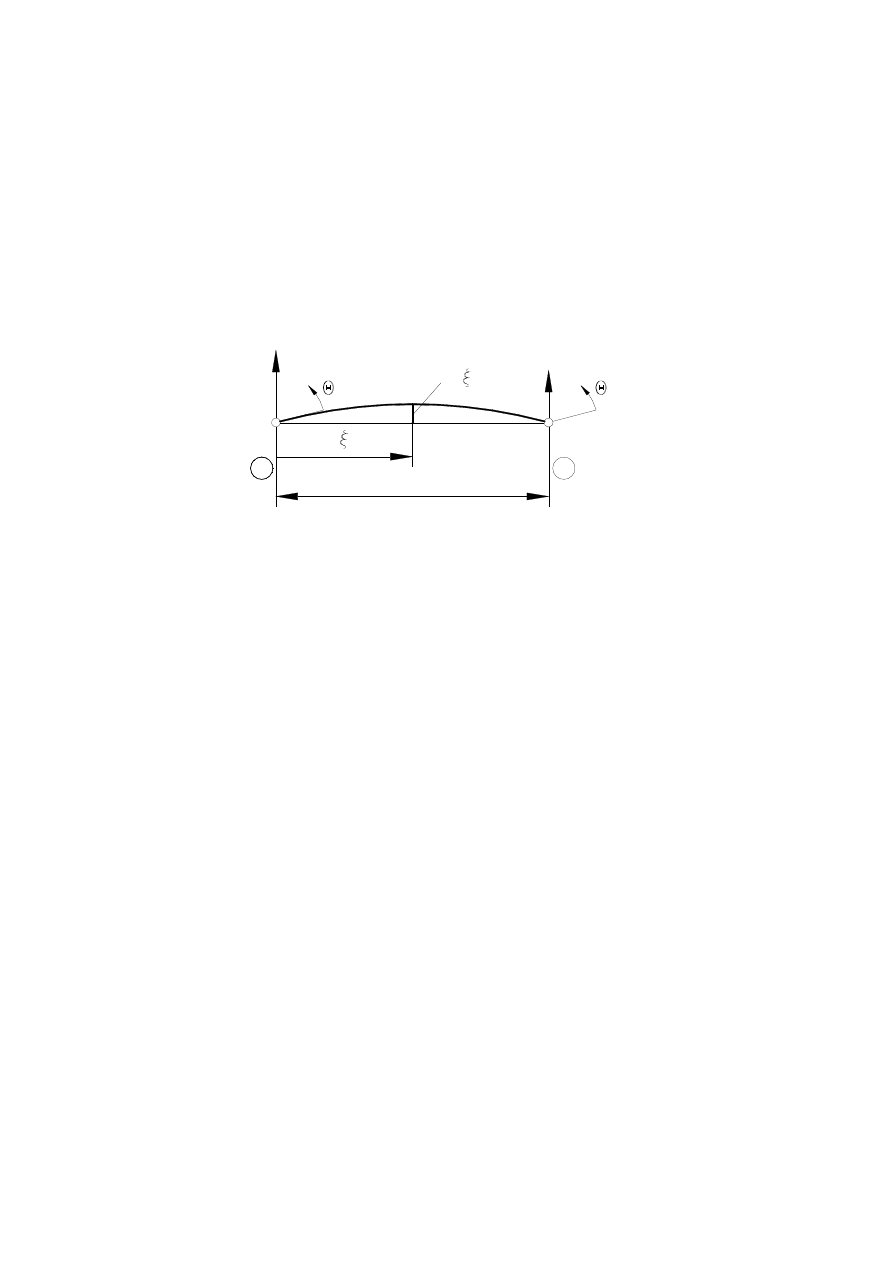
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
42
do czynienia z aproksymacją globalną, parametryczną. Funkcje aproksymujące są określone w całym obszarze a
ich przebieg uzależniony jest od wartości parametrów występujących we wzorach definiujących. W rezultacie
zmiana dowolnego parametru prowadzi do zmiany przebiegu poszukiwanej funkcji w całym obszarze.
W metodzie elementów skończonych stosuje się aproksymację lokalną, węzłową. Oznacza to, że funkcje
aproksymujące definiowane są lokalnie w elementach skończonych, a ich przebieg określany jest przez wartość
funkcji w węzłach siatki podziału. W efekcie zmiana jednego parametru (wartości funkcji w jednym węźle)
zmienia rozwiązanie tylko w bezpośrednim otoczeniu tego węzła. Postępowanie jest zbliżone do przyjmowanego
w grafice komputerowej i programach CAD przy aproksymacji kształtu za pomocą funkcji sklejanych.
l
1
2
e
w( )
w =q
1
1
=q
2
1
=q
4
2
w =q
2
3
Rys. 24. Element skończony belki
Typowy element skończony belki (rys. 24) stanowi segment o długości l
e
, w którym założona postać funkcji
ugięcia wyraża się wzorem
3
4
2
3
2
1
)
(
ξ
α
ξ
α
ξ
α
α
ξ
+
+
+
=
w
(103)
Taki wielomian jest określony przez cztery parametry
i
α
. W MES dążymy jednak do tego, aby funkcja ugięcia
była definiowana przez przemieszczenia węzłowe. Przyjmijmy, że cztery niezależne przemieszczenia węzłowe:
w
1
i w
2
czyli przemieszczenia węzłów oraz
1
2
i
θ θ
czyli kąty obrotu w węzłach tworzą wektor (macierz-
kolumnę):
{ }
=
=
2
2
1
1
4
3
2
1
θ
θ
w
w
q
q
q
q
q
e
e
.
(104)
Wektor
{ }
e
q
nazywamy wektorem przemieszczeń węzłowych elementu skończonego lub też wektorem stopni
swobody elementu. Ugięcia
)
(
ξ
w
przedstawimy jako uzależnione od przemieszczeń węzłowych q
i
wg formuły
4
1
( )
( )
i
i
i
w
N
q
ξ
ξ
=
=
∑
.
(105)
Potrzebne jest więc wyznaczenie związków między stopniami swobody
4
3
2
1
,
,
,
α
α
α
α
funkcji
)
(
ξ
w
(103) a
nowymi stopniami swobody
4
3
2
1
,
,
,
q
q
q
q
(105).
Zauważmy, że:
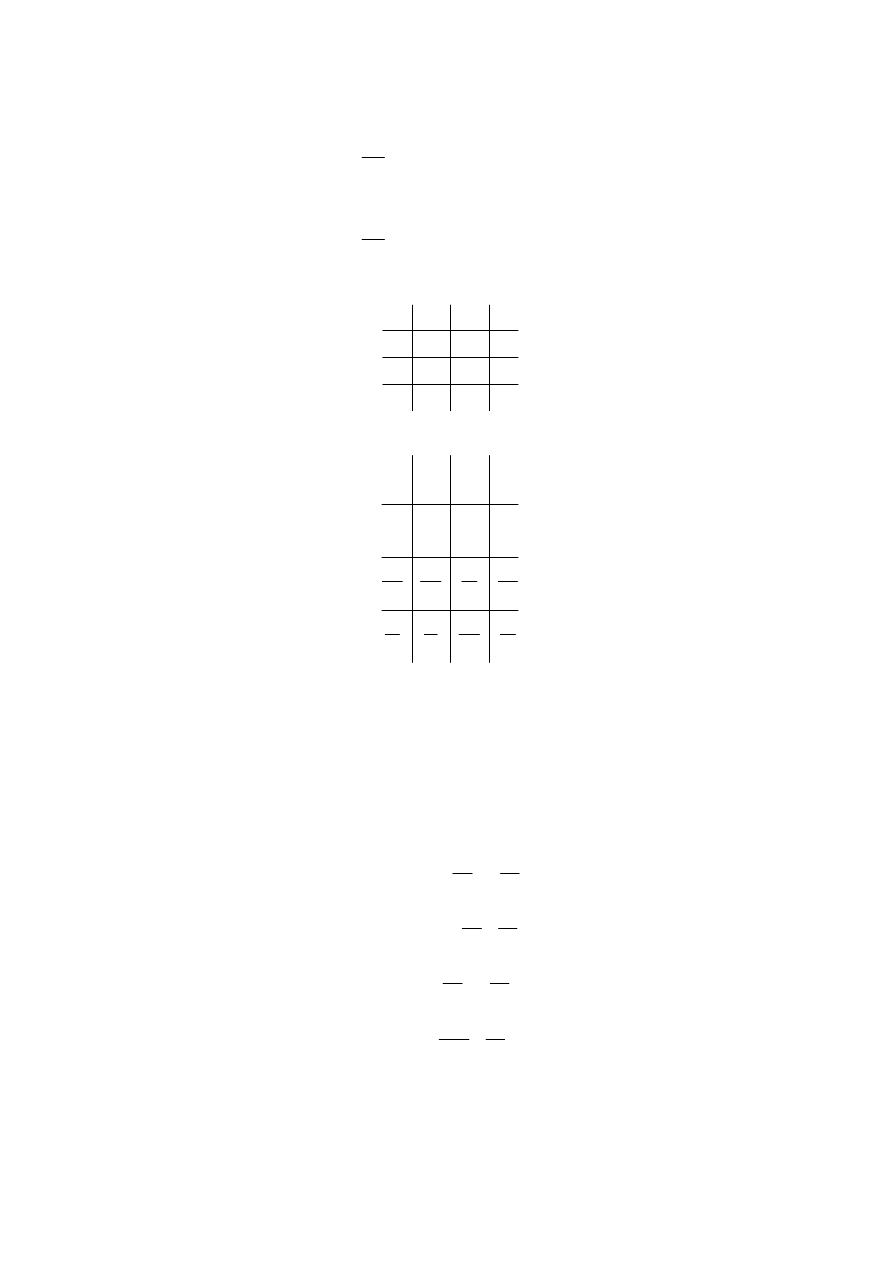
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
43
1
1
2
2
2
3
3
1
2
3
4
2
4
2
3
4
(0)
,
(0)
,
( )
,
( )
2
3
.
e
e
e
e
e
q
w
dw
q
d
q
w l
l
l
l
dw
q
l
l
l
d
α
α
ξ
α α
α
α
α
α
α
ξ
=
=
=
=
=
= +
+
+
=
=
+
+
(106)
Równania (106) możemy zapisać w postaci macierzowej
1
1
2
2
2
3
3
3
2
4
4
1
0
0
0
0
1
0
0
.
1
0
1
2
3
e
e
e
e
e
q
q
l
l
l
q
l
l
q
α
α
α
α
=
(107)
Stąd wyznaczyć można zależność odwrotną
1
1
2
2
3
3
2
2
4
4
3
3
2
1
0
0
0
0
1
0
0
3
2
3
1
2
1
2
1
e
e
e
e
e
e
e
e
q
q
q
l
l
l
l
q
l
l
l
l
α
α
α
α
=
−
−
−
−
.
(108)
Podstawiając (108) do (103) otrzymamy
1
1
2
2
2
3
1
2
3
4
3
3
4
4
( )
1, ,
,
( ),
( ),
( ),
( )
q
q
w
N
N
N
N
q
q
α
α
ξ
ξ ξ ξ
ξ
ξ
ξ
ξ
α
α
=
=
,
(109)
gdzie
2
3
1
2
3
2
3
2
2
2
3
3
2
3
2
3
4
2
( ) 1 3
2
,
( )
2
,
( )
3
2
,
( )
.
e
e
e
e
e
e
e
e
N
l
l
N
l
l
N
l
l
N
l
l
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
= −
+
= −
+
=
−
−
=
+
(110)
Funkcje
( )
i
N
ξ
nazywamy funkcjami kształtu elementu belkowego. Są one oczywiście, tak jak założona
wstępnie funkcja ugięcia (103), wielomianami trzeciego stopnia. Ze związku (109) wynika, że każda z funkcji
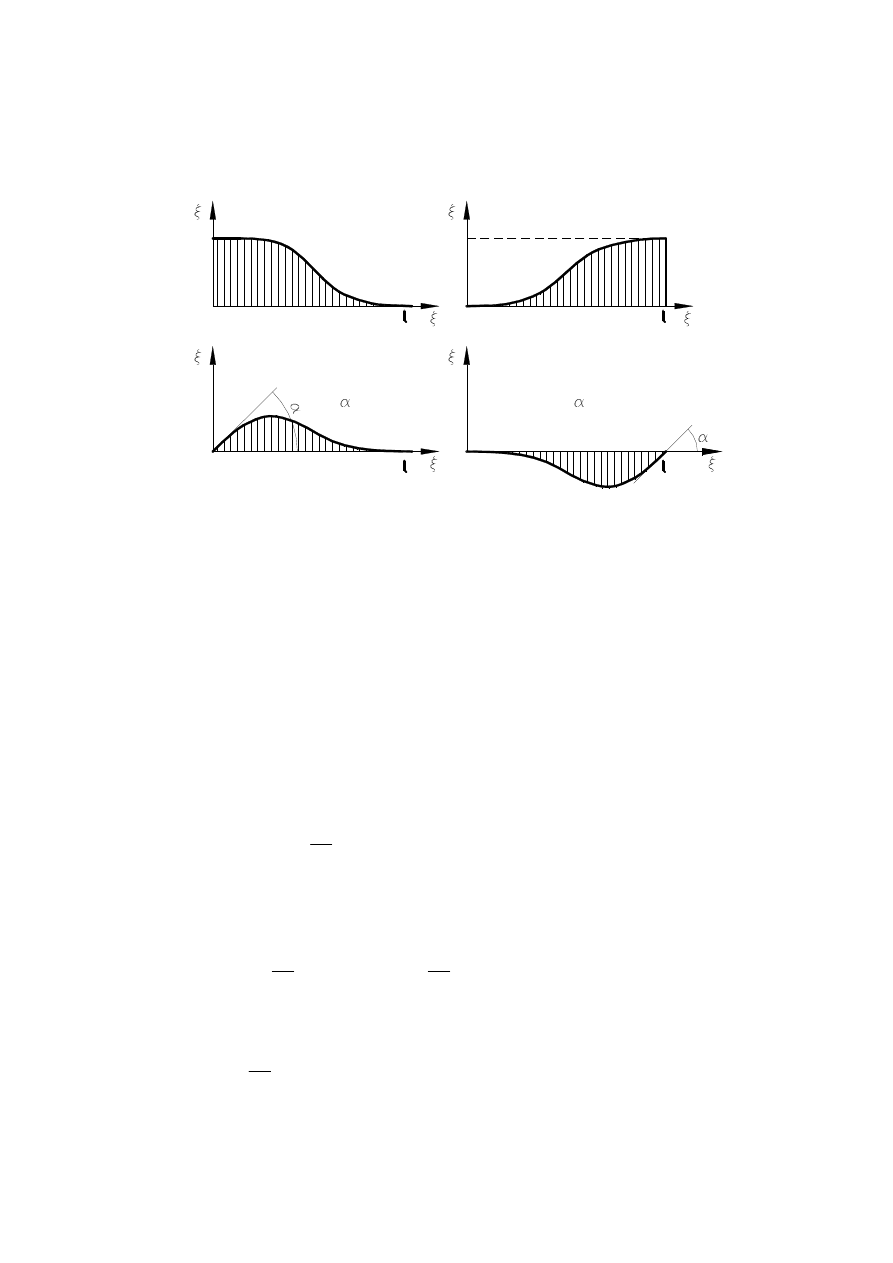
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
44
( )
i
N
ξ
opisuje linie ugięcia elementu belki, w którym przemieszczenia węzłowe są:
1
i
q
=
, a dla
0
j
j
i
q
≠
=
(rys. 25).
N ( )
1
1
1
2
N ( )
N ( )
4
N ( )
3
tg =1
e
tg =1
e
e
e
Rys. 25. Funkcje kształtu elementu belki
Znając funkcję ugięcia (109) możemy wyznaczyć rozkłady pochodnych linii ugięcia
( )
w
ξ
jako funkcję
położenia i przemieszczeń węzłowych. Mamy więc
{ }
{ }
{ }
( )
( )
,
( )
( )
,
( )
( )
.
e
e
e
w
N
q
w
N
q
w
N
q
ξ
ξ
ξ
ξ
ξ
ξ
=
′
′
=
′′
′′
=
(111)
Także całkowitą energię potencjalną elementu belki można przedstawić jako uzależnioną od przemieszczeń
węzłowych. Całkowita energia potencjalna elementu belki o długości
e
l
obciążonego obciążeniem ciągłym
( )
p
ξ
jest zgodnie z (92) określona wzorem:
2
0
0
(
( ))
( ) ( )
2
e
e
l
l
e
e
ze
i
i
j
j
i
j
EI
V
U
W
w
d
p
w
d
Pw
M
ξ
ξ
ξ
ξ ξ
ϑ
′′
=
−
=
−
−
−
∑
∑
∫
∫
.
(112)
Wykorzystując (111) możemy po kolejnych przekształceniach uzyskać wyrażenie na energię sprężystą
e
U
w
formie macierzowej:
{ }
{ }
0
0
1
1
1
2
1
3
1
4
2
1
2
2
2
3
2
4
3
1
3
2
3
3
3
4
4
1
4
2
4
3
4
4
( )
( )
2
2
2
e
e
l
l
e
e
e
e
EI
EI
U
w
w
d
q
N
N
q
d
N N
N N
N N
N N
N N
N N
N N
N N
EI
q
N N
N N
N N
N N
N N
N N
N N
N N
ξ
ξ ξ
ξ
′′
′′
′′
′′
=
=
=
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
=
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
∫
∫
{ }
0
.
e
l
e
d
q
ξ
∫

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
45
Wynik możemy zapisać w postaci
[ ]
{ }
1
2
e
e
e
e
U
q
k
q
=
,
(113)
gdzie
[ ]
1
1
1
2
1
3
1
4
0
0
0
0
2
1
2
2
2
3
2
4
0
0
0
0
3
1
3
2
3
3
3
4
0
0
0
0
4
1
4
2
0
0
e
e
e
e
e
e
e
e
e
e
e
e
e
e
l
l
l
l
l
l
l
l
e
l
l
l
l
l
l
N N d
N N d
N N d
N N d
N N d
N N d
N N d
N N d
k
EI
N N d
N N d
N N d
N N d
N N d
N N d
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
=
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
′′ ′′
∫
∫
∫
∫
∫
∫
∫
∫
∫
∫
∫
∫
∫
4
3
4
4
0
0
e
e
l
l
N N d
N N d
ξ
ξ
′′ ′′
′′ ′′
∫
∫
∫
.
(114)
Macierz
[ ]
e
k
w wyrażeniu (113) nazywamy macierzą sztywności elementu skończonego belki. Po podstawieniu
do wzoru (114) drugich pochodnych funkcji
( )
i
N
ξ
i obliczeniu wartości całek otrzymamy:
[ ]
2
2
3
2
2
6
3
6
3
3
2
3
2
6
3
6
3
3
3
2
e
e
e
e
e
e
e
e
e
e
e
e
e
e
l
l
l
l
l
l
EI
k
l
l
l
l
l
l
l
−
−
=
−
−
−
−
.
(115)
Podobnie przekształcamy pracę obciążenia ciągłego działającego na element skończony:
{ }
{ }
0
0
1
2
3
4
0
( ) ( )
( )
( )
( ) ( )
,
( ) ( )
,
( ) ( )
,
( ) ( )
,
e
e
e
l
l
p
ze
e
l
e
W
p
w
d
p
N
q
d
N
p
d
N
p
d
N
p
d
N
p
d
q
d
ξ
ξ ξ
ξ
ξ
ξ
ξ
ξ ξ
ξ
ξ ξ
ξ
ξ ξ
ξ
ξ ξ
ξ
=
=
=
=
∫
∫
∫
{ }
1
2
1
2
3
4
3
4
,
,
,
p
e
e
e
e
ze
e
e
e
q
q
W
F F F F
F
q
q
q
=
=
,
(116)
0
( ) ( )
e
l
e
i
i
F
N
p
d
ξ
ξ ξ
=
∫
.
(117)
Wzór (116) wskazuje, że wartości
e
i
F
możemy traktować jako wartości uogólnionych sił węzłowych
równoważnych obciążeniu ciągłemu
( )
p
ξ
działającemu na analizowany element skończony. Elementy
1
e
F
i
3
e
F
wektora
{ }
e
F
są siłami skupionymi działającymi w węzłach elementu a
2
e
F
i
4
e
F
są wartościami
momentów sił działających w tych węzłach.
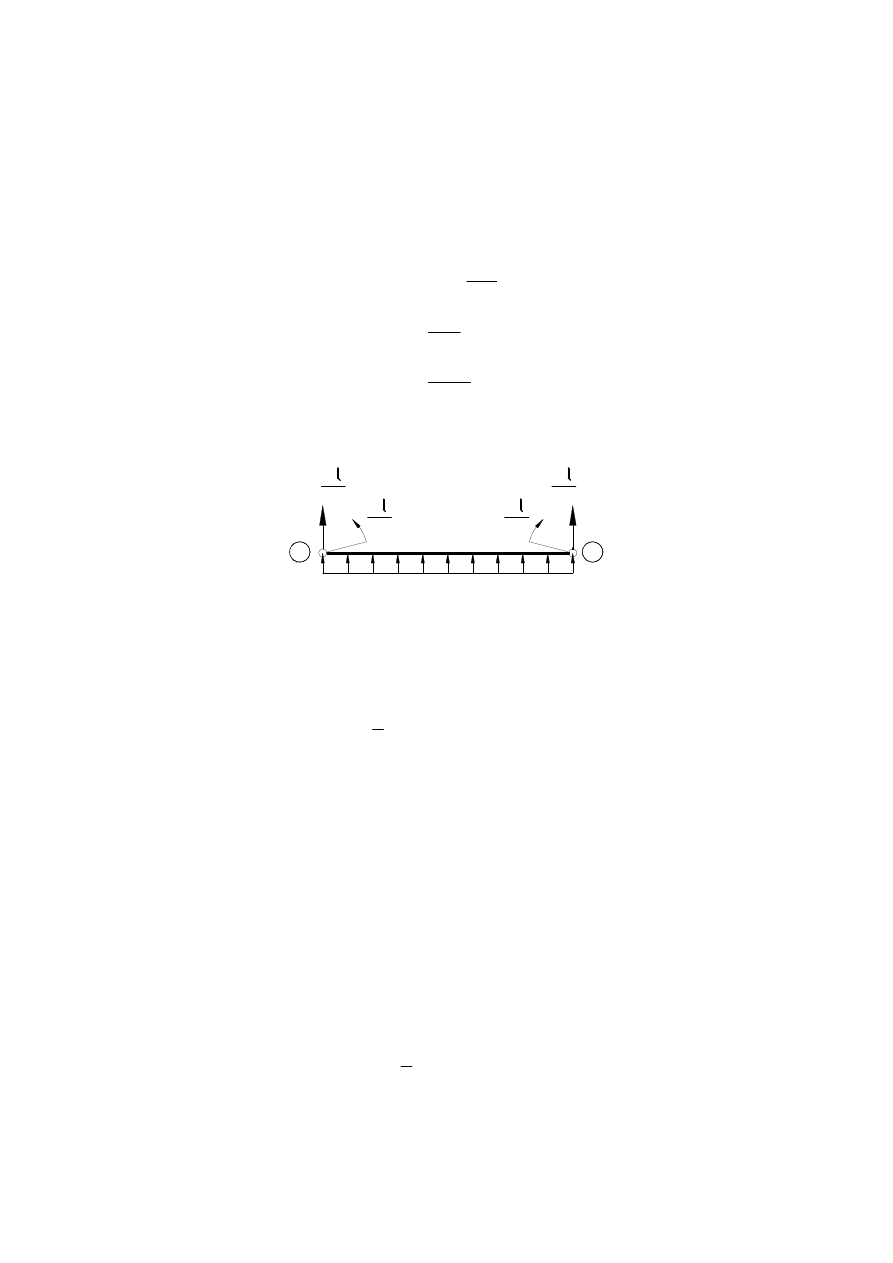
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
46
P
RZYKŁAD
6.
Znaleźć wartości równoważnych sił węzłowych odpowiadających obciążeniu ciągłemu o stałej wartości
0
( )
p
p
ξ
=
.
Rozwiązanie
Obliczając wartości kolejnych całek (117) otrzymamy:
0
1
3
2
0
2
2
0
4
2
12
12
e
e
e
e
e
e
e
p l
F
F
p l
F
p l
F
=
=
=
−
=
(118)
Interpretację geometryczną otrzymanego wyniku przedstawia rysunek 26.
1
2
0
p
p
2
0 e
0 e
2
0 e
12
2
12
2
e
0
p
p
p
Rys. 26. Siły węzłowe w elemencie belki równoważne obciążeniu ciągłemu
0
p
Związki (113) i (116) pozwalają napisać wyrażenie na całkowitą energię potencjalną elementu skończonego
belki w postaci
[ ] { }
{ }
4 4
4 1
1 4
1 4
4 1
1
2
e
e
ze
V
U
W
q
q
q
F
k e
e
e
e
e
×
×
×
×
×
=
−
=
−
.
(119)
Indeksy na dole oznaczają wymiary poszczególnych wektorów i macierzy.
Jeżeli belka została podzielona na
LE
elementów skończonych i
LW
węzłów, to jej ugięcie opisane jest przez
2
n
LW
=
stopni swobody, tworzących tak zwany globalny wektor stopni swobody modelu belki:
{ }
1
2
n
q
q
q
q
=
…
.
Każdemu elementowi belki odpowiadają cztery spośród stopni swobody
(
1, 2,
, )
i
q i
n
=
…
.
Energia sprężysta elementu skończonego
e
U
może być więc zapisana w postaci
[ ] { }
*
1
1
1
2
e
n n
n
n
e
U
q
q
k
×
×
×
=
,
(120)
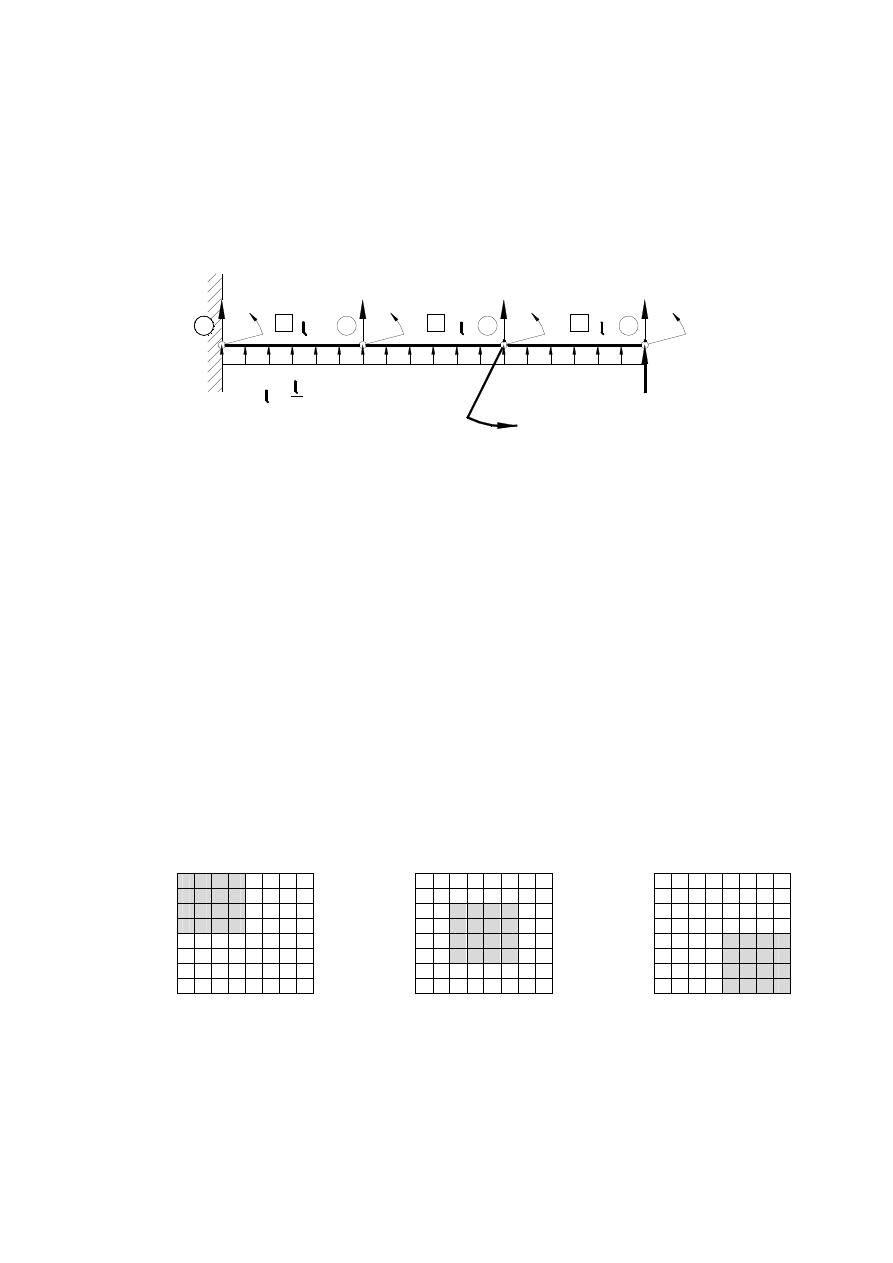
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
47
gdzie rozszerzona macierz sztywności elementu o wymiarze
n n
×
*
e
k
ma, tak jak macierz (115), tylko 16
niezerowych elementów. Ich miejsca w macierzy uzależnione są od pozycji jaką mają kolejne stopnie swobody
elementu w globalnym wektorze stopni swobody
{ }
q
.
1
2
0
p
3
4
P
M
1
2
3
1
q
q
3
q
5
q
7
q
2
4
q
q
6
q
8
=
3
e
e
e
e
Rys. 27. Model utwierdzonej jednostronnie belki obciążonej siłami skupionymi
,
P M
oraz obciążeniem ciągłym
0
p
P
RZYKŁAD
7
Model belki przedstawionej na rysunku 27 składa się z trzech elementów skończonych i czterech węzłów. Globalny wektor
stopni swobody ma więc 8 elementów:
{ }
1
1
2
1
3
2
4
2
5
3
6
3
7
4
8
4
q
w
q
q
w
q
q
q
w
q
q
w
q
θ
θ
θ
θ
=
=
.
Stopniami swobody elementu pierwszego są
1
2
3
,
,
q q q
,
4
q
elementu drugiego:
3
4
5
,
,
q q q
,
6
q
a elementu trzeciego
5
6
7
,
,
q q q
,
8
q
. Kolejne macierze
i
k
∗
mają więc postać:
1
k
∗
=
2
k
∗
=
3
k
∗
=
gdzie niezerowe elementy macierzy wypełniają jedynie obszar przyciemniony i określone są przez wzór (115).
Przedstawienie
e
U
w postaci (120) daje możliwość łatwego zsumowania energii dla całej analizowanej
konstrukcji

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
48
{ }
[ ]
{ }
1
1
1
1
2
2
LE
LE
e
e
e
i
U
U
q
k
q
q
K
q
∗
=
=
=
=
=
∑
∑
.
(121)
Współczynniki macierzy
[ ]
K
stanowią, zgodnie z regułami dodawania macierzy, sumy odpowiednich
współczynniki macierzy
e
k
∗
.
W rezultacie całkowita energia potencjalna całej konstrukcji może być zapisana jako:
[ ]
{ }
{ }
1
2
z
V
U
W
q
K
q
q
F
= −
=
−
,
(122)
gdzie
{ }
F
oznacza wektor sił węzłowych modelu. Wyliczając elementy wektora
{ }
F
uwzględniamy
równoważne siły węzłowe od obciążenia ciągłego oraz istniejące siły skupione. W ten sposób otrzymaliśmy
całkowitą energię potencjalną belki jako funkcję nieznanych przemieszczeń węzłowych
{ }
q
. Ponieważ jest to
kwadratowa, dodatnio określona funkcja wielu zmiennych więc twierdzenie o minimum całkowitej energii
potencjalnej prowadzi do warunku:
0
i
V
q
∂ =
∂
,
1, 2, 3,
,
i
n
=
…
Dokonując różniczkowania wyrażenia (122) otrzymamy układ równań liniowych
[ ]
{ } { }
K
q
F
=
.
(123)
Przed rozwiązaniem (123) należy uwzględnić przemieszczeniowe warunki brzegowe, czyli warunki podparcia
konstrukcji. Warunki te oznaczają narzucenie wartości niektórych elementów wektora
{ }
q
. Macierz
[ ]
K
układu równań przed uwzględnieniem warunków podparcia jest, podobnie jak każda z macierzy sztywności
elementów, macierzą osobliwą. Jest to odzwierciedleniem faktu, że bez narzucenia przynajmniej takich
warunków podparcia, które uniemożliwiają ruch modelu konstrukcji jako bryły sztywnej, rozwiązanie w postaci
przemieszczeń byłoby niejednoznaczne. Uwzględnienie warunków podparcia prowadzi do modyfikacji układu
równań. Po rozwiązaniu przekształconego układu (123) otrzymujemy wartości wszystkich przemieszczeń
węzłowych
{ }
q
. W końcowej fazie obliczeń możemy wyznaczyć rozkłady sił wewnętrznych w każdym
elemencie skończonym.
1
2
1
2
3
4
3
4
1
2
1
2
3
4
3
4
( )
( )
,
,
,
,
( )
( )
,
,
,
.
q
e
e
q
q
M
EIw
EI N
N
N
N
q
q
q
q
T
EIw
EI N
N
N
N
q
q
ξ
ξ
ξ
ξ
′′
′′
′′
′′
′′
=
=
′′′
′′′
′′′
′′′
′′′
= −
=
(124)
Po wyznaczeniu kolejnych pochodnych funkcji kształtu
( )
i
N
ξ
określonych przez wzory (110) otrzymamy
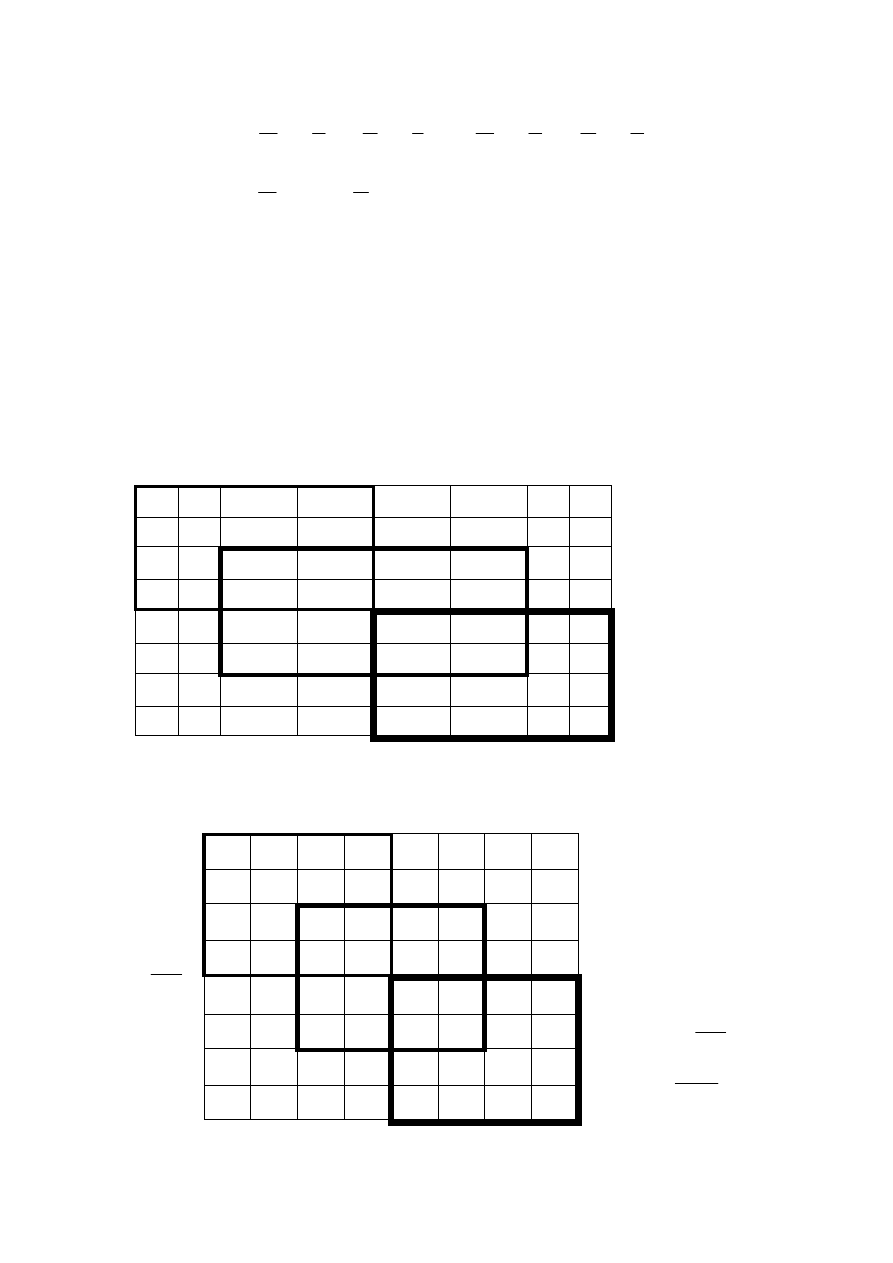
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
49
1
2
3
4
3
3
3
2
1
3
2
4
3
2
12
6
2
12
6
( )
(
)
(
)
(
)
(
)
,
2
3
2
3
12
6
( )
(
)
(
)
.
e
e
e
q
e
e
e
e
e
e
e
l
l
l
M
q
l q
q
q
EI
l
l
l
l
T
q
q
q
q
EI
l
l
ξ
ξ
ξ
ξ
ξ
ξ
=
−
+
−
−
−
+
−
= −
−
+
+
(125)
Ze wzorów (125) wynika, że przy założonych funkcjach kształtu
( )
q
M
ξ
jest zawsze funkcją liniową na
prezentowanym elemencie skończonym belki a
( )
T
ξ
jest funkcją stałą.
P
RZYKŁAD
8
Model belki przestawiony w przykładzie 7 i na rysunku (27) prowadzi do układu równań
1
11
k
1
12
k
1
13
k
1
14
k
0
0
0
0
1
21
k
1
22
k
1
23
k
1
24
k
0
0
0
0
1
31
k
1
32
k
1
2
33
11
k
k
+
1
2
34
12
k
k
+
2
13
k
2
14
k
0
0
1
41
k
1
42
k
1
2
43
21
k
k
+
1
2
44
22
k
k
+
2
23
k
2
24
k
0
0
0
0
2
31
k
2
32
k
2
3
33
11
k
k
+
2
3
34
12
k
k
+
3
13
k
3
14
k
0
0
2
41
k
2
42
k
2
3
43
21
k
k
+
2
3
44
22
k
k
+
2
23
k
3
24
k
0
0
0
0
3
31
k
3
32
k
3
33
k
3
34
k
0
0
0
0
3
41
k
3
42
k
3
43
k
3
44
k
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
q
F
q
F
q
F
q
F
q
F
q
F
q
F
q
F
=
gdzie
e
ij
k
oznacza współczynnik
( , )
i j
macierzy elementu skończonego o numerze
e
.
Uwzględniając podane warunki podparcia i obciążenia oraz podstawiając wartości współczynnika
e
ij
k
mamy:
6
3
e
l
–6
3
e
l
0
0
0
0
3
e
l
2
2
e
l
3
e
l
−
2
e
l
0
0
0
0
–6
3
e
l
−
12
0
–6
3
e
l
0
0
3
e
l
2
e
l
0
2
4
e
l
3
e
l
−
2
e
l
0
0
0
0
–6
3
e
l
−
12
0
–6
3
e
l
0
0
3
e
l
2
e
l
0
2
4
e
l
3
e
l
−
2
e
l
0
0
0
0
–6
3
e
l
−
6
3
e
l
−
3
2
e
EI
l
0
0
0
0
3
e
l
2
e
l
3
e
l
−
2
2
e
l
1
2
0
3
4
0
5
6
0
7
2
8
0
0
0
0
2
12
e
e
e
e
F
F
p l
q
q
p l
q
M
q
p l
P
q
q
p l
=
+
−
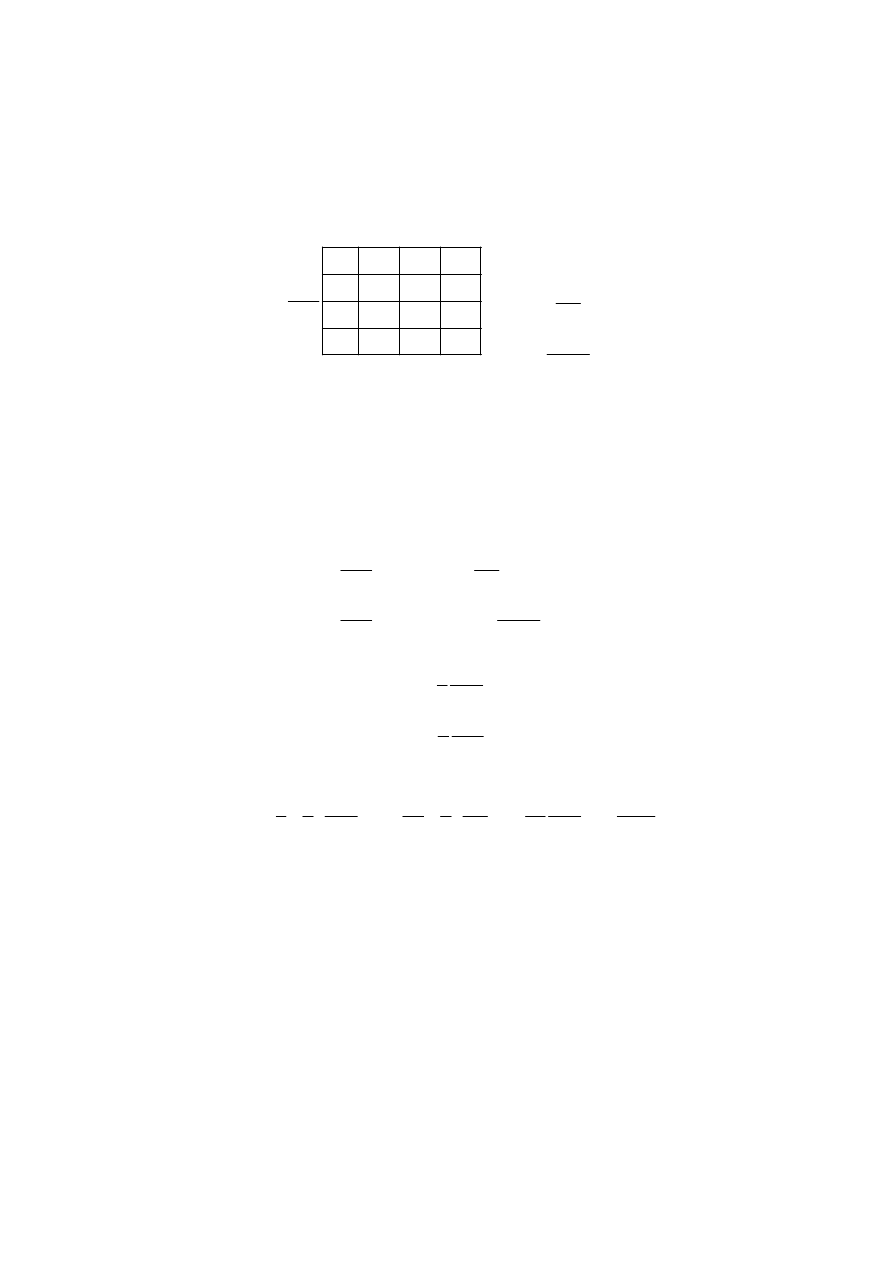
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
50
Do układu równań wprowadziliśmy jako znane
1
0
q
=
i
2
0
q
=
(warunki utwierdzenia węzła pierwszego). Nieznane są
natomiast wartości
1
F
i
2
F
, ponieważ nieznane są wartości reakcji.
P
RZYKŁAD
9
Jeśli model belki z rysunku 22 składać się będzie tylko z jednego elementu skończonego otrzymamy układ równań:
1
2
2
2
0
3
3
2
2
2
4
0
0
6
3
6
3
0
3
2
3
2
6
3
6
3
2
3
3
2
12
F
l
l
F
l
l
l
l
EI
p l
q
l
l
l
q
l
l
l
l
p l
−
−
=
−
−
−
−
−
Rozwiązanie możemy otrzymać przekształcając powyższy układ równań do postaci
[ ]
{ }
1
2
3
4
F
F
A
b
q
q
=
,
lub, co prostsze, redukując go do dwóch ostatnich równań (po przyjęciu
1
0
q
=
i
2
0
q
=
)
0
3
4
3
2
2
0
3
4
3
2
(6
3
)
,
2
2
( 3
2
)
,
12
p l
EI
q
lq
l
p l
EI
lq
l q
l
−
=
−
−
+
=
Rozwiązaniem jest:
4
0
3
3
0
4
1
8
1
6
p l
q
EI
p l
q
EI
=
=
Wyznaczając ugięcie, zgodnie ze wzorem (109) otrzymamy
2
2
2
3
2
3
0
0
0
0
3
1
2
1
5
( )
8
6
8
6
24
12
p l
p l
p l
p l
w
EI
EI
EI
EI
ξ
ξ
ξ
ξ
ξ
−
=
−
+
+
=
−
czyli rozwiązanie identyczne z uzyskanym metodą Ritza – przykład 5. Wynik jest oczywisty jeśli zauważymy, że w obu
przypadkach stosowaliśmy jako funkcję przybliżającą linię ugięcia wielomian trzeciego stopnia. Różnica polega na przyjęciu
różnej parametryzacji (103) o metodzie Ritza i (105) w MES.
W metodzie elementów skończonych nieistotna jest statyczna wyznaczalność lub statyczna
niewyznaczalność konstrukcji. Stwierdziliśmy poprzednio, że minimalna liczba odebranych stopni swobody
odzwierciedlających warunki podparcia odpowiada odebraniu możliwości ruchu modelu jako ciała sztywnego.
Większa liczba warunków podparcia ułatwia jedynie rozwiązanie ponieważ zmniejsza liczbę niewiadomych, a w
dużych zadaniach dodatkowo „stabilizuje” rozwiązanie i poprawia dokładność wyników (poprawia
uwarunkowanie numeryczne zadania-patrz podrozdział 8.1).
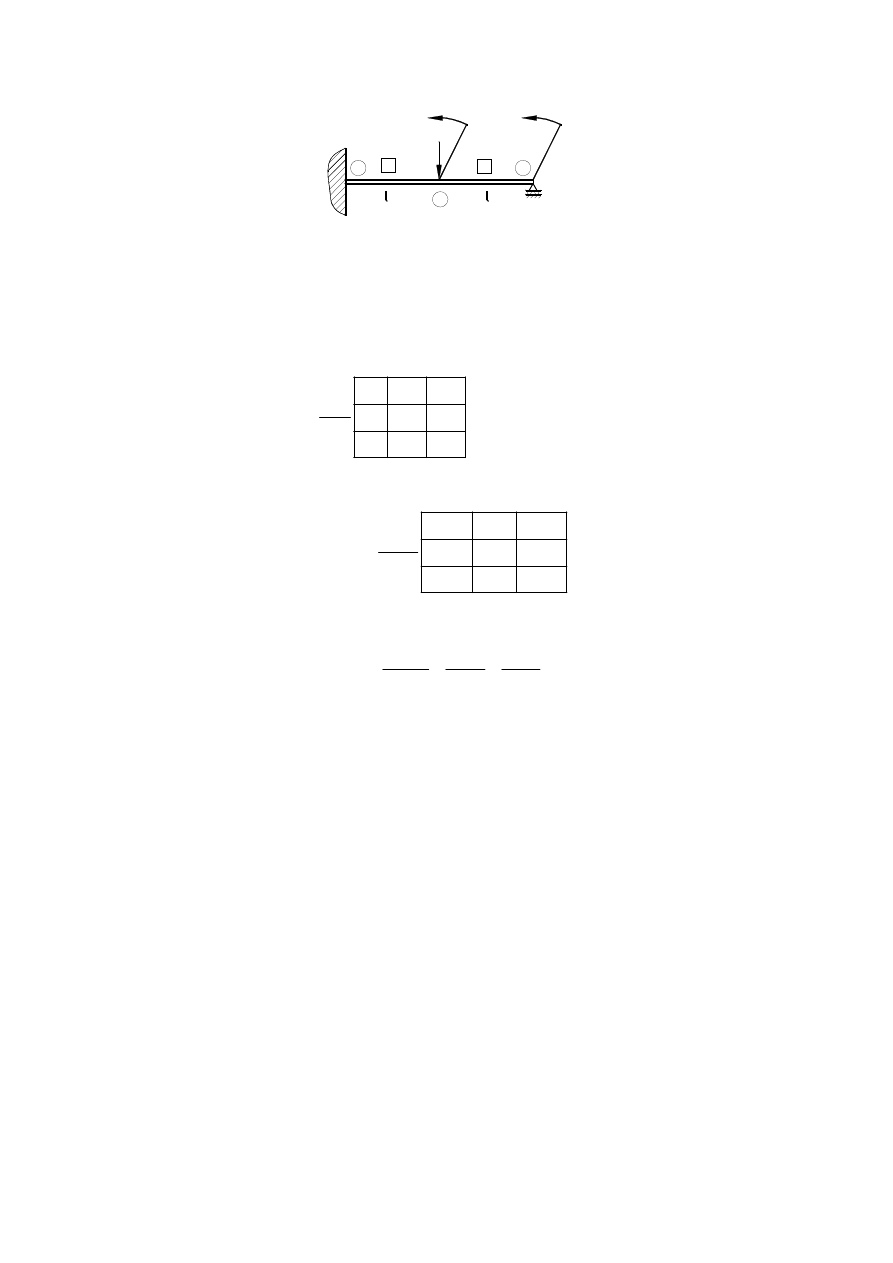
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
51
1
2
2
3
P
M
1
M
1
2
A
B
C
Rys. 28. Belka o długości
2l
podparta w sposób statycznie niewyznaczalny (przykład 10)
P
RZYKŁAD
10
Obliczyć metodą elementów skończonych ugięcie punktu
B
belki z rysunku 28.
Rozwiązanie
Przyjmując model obliczeniowy złożony z dwóch elementów skończonych otrzymamy
3
2
2
4
1
3
2
2
6
2
12
0
3
2
0
4
3
2
l
q
P
EI
l
l
q
M
l
l
l
l
q
M
−
=
.
Odwracając macierz powyższego układu równań dostaniemy
2
3
2
4
2
1
6
3
2
7
3
12
3
15
12
96
12
12
48
q
w
l
l
l
P
l
q
l
M
EI
q
l
M
θ
θ
−
−
=
=
−
−
−
.
Poszukiwane ugięcie punktu B jest więc równe
3
2
2
1
2
2
7
96
32
8
Pl
M l
M l
w
EI
EI
EI
−
=
+
−
Jest to rozwiązanie dokładne, ponieważ rozwiązaniem dokładnym dla segmentu belki nie obciążonej obciążeniem ciągłym
jest wielomian trzeciego stopnia, a taki właśnie wielomian jest założoną z góry funkcją ugięcia na elemencie skończonym.
5.2.
PRĘTY ROZCIĄGANE I SKRĘCANE. SPRĘŻYNY
Podstawą do zbudowania układu równań metody elementów skończonych jest sformułowanie związków
obowiązujących w elemencie skończonym, a także umiejętność budowy macierzy sztywności elementu i
wyznaczania równoważnych sił węzłowych od obciążenia ciągłego. Bardzo proste zależności otrzymamy
stosując przedstawiony wcześniej sposób postępowania w przypadku rozciągania i skręcania. Przeanalizujemy
najpierw najprostszy element pręta rozciąganego lub ściskanego (rys. 29).
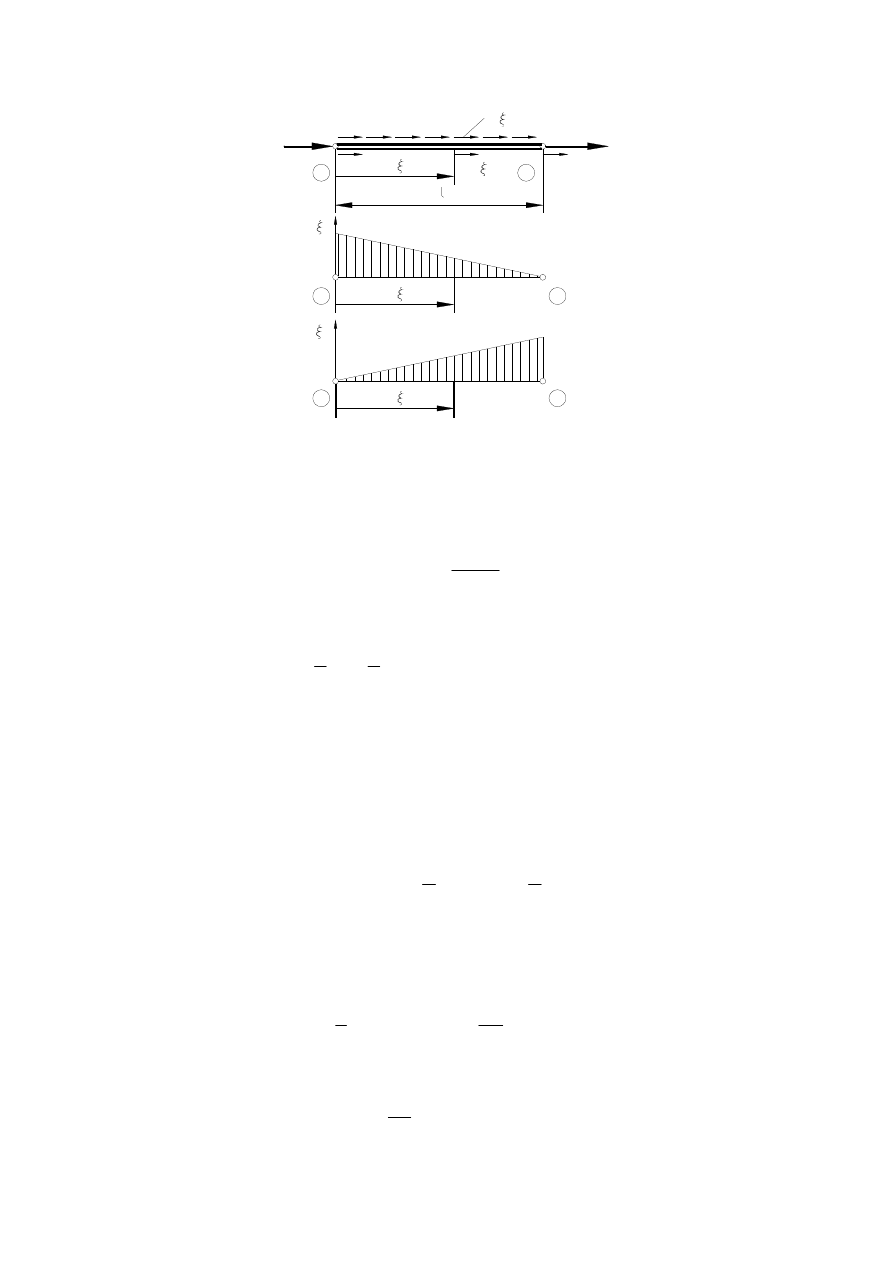
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
52
2
1
1
1
e
N ( )
1
N ( )
2
u( )
p( )
u1
2
u
1
2
1
2
F
2
1
F
Rys. 29. Dwuwęzłowy element skończony pręta rozciąganego i funkcje kształtu
1
2
( ),
( )
N
N
ξ
ξ
Jeżeli przemieszczenie wewnątrz elementu
( )
u
ξ
ma być jednoznacznie określone przez przemieszczenia
węzłowe
1
u
i
2
u
to przyjąć można, że
( )
u
ξ
jest funkcją liniową
2
1
1
( )
e
u
u
u
u
l
ξ
ξ
−
= +
.
(126)
Przekształcając
( )
u
ξ
do postaci analogicznej jak (105) otrzymamy:
{ }
1
1
2
1
2
2
( )
1
( ),
( )
e
e
q
u
u
u
N
N
N
q
q
l
l
ξ
ξ
ξ
ξ
ξ
= −
+
=
=
,
(127)
gdzie
{ }
1
1
2
2
e
e
e
q
u
q
q
u
=
=
,
oznacza wektor stopni swobody elementu a
1
2
( ),
( )
N
N
N
ξ
ξ
=
,
gdzie
1
( ) 1
,
e
N
l
ξ
ξ
= −
2
( )
e
N
l
ξ
ξ
=
,
(128)
oznacza wektor funkcji kształtu.
Aby znaleźć macierz sztywności wyznaczamy energię odkształcenia sprężystego zgromadzoną w elemencie
skończonym. Mamy:
2
0
0
1
( ) ( )
( ( ))
2
2
e
e
l
l
e
EA
U
A
d
d
σ ξ ε ξ ξ
ε ξ
ξ
=
=
∫
∫
.
(129)
Ze wzoru (127) otrzymamy
1
1
2
2
( )
,
.
e
q
du
N
N
q
d
ε ξ
ξ
′
′
=
=
(130)
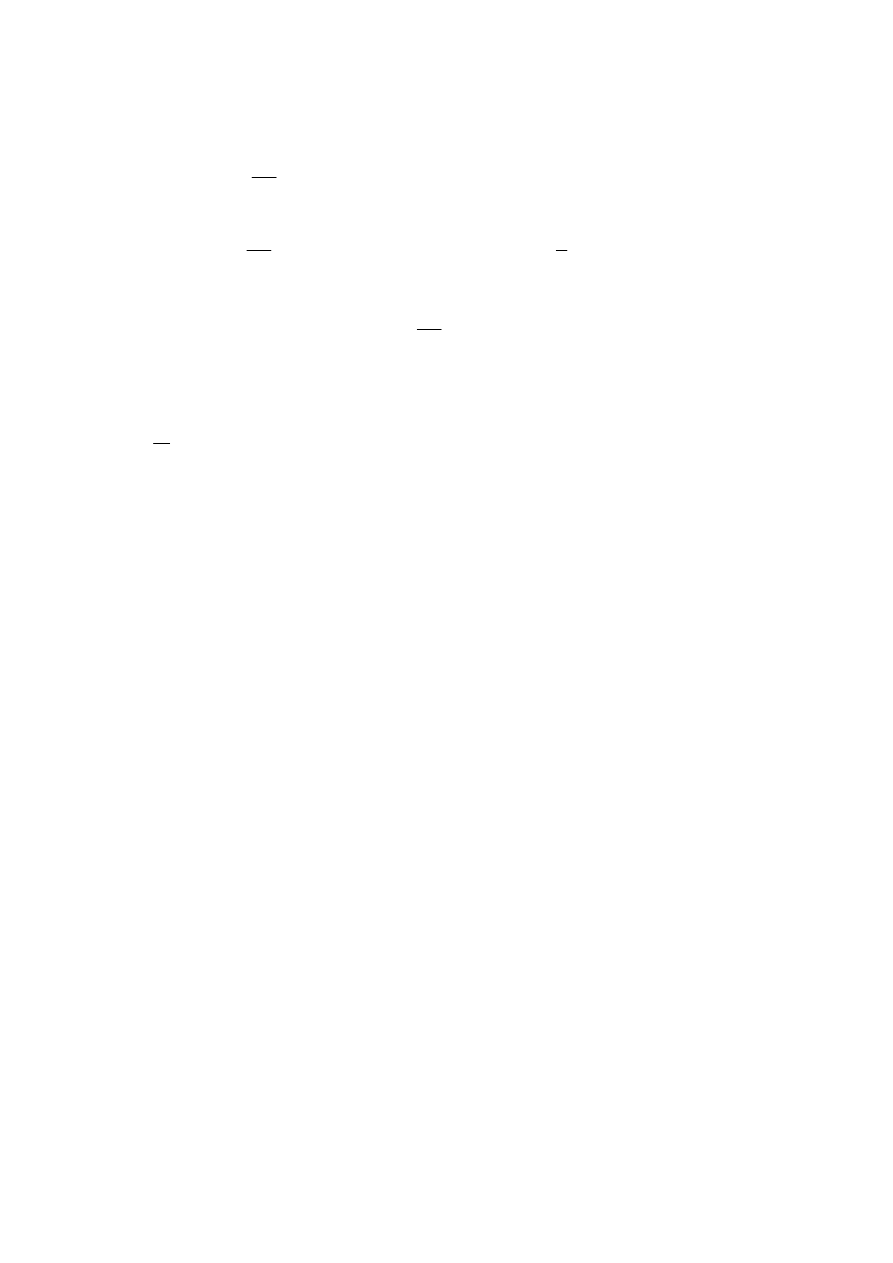
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
53
Energię sprężystą
e
U
przedstawić więc można jako
[ ]
{ }
1
1
1
2
1
2
2
0
2
1
1
1
2
1
1
2
2
0
2
1
2
2
,
,
2
1
,
,
2
2
e
e
l
e
e
e
l
e
e
e
e
e
N
q
EA
U
q q
N
N
d
q
N
N N
N N
q
EA
q q
d
q
k
q
q
N N
N N
ξ
ξ
′
′
′
=
=
′
′ ′
′ ′
=
=
′ ′
′ ′
∫
∫
(131)
gdzie
[ ]
1
1
1
1
e
e
EA
k
l
−
=
−
,
(132)
jest macierzą sztywności elementu pręta rozciąganego.
Znajdziemy teraz formuły na wyznaczenie równoważnych sił węzłowych dla dowolnego obciążenia ciągłego
N
( )
m
p
ξ
działającego na element skończony. W tym celu obliczmy drugi człon w wyrażeniu na całkowitą
energię potencjalną
1
1
2
2
0
0
1
1
2
2
0
0
( ) ( )
( ) ( ),
( ) ( )
( ) ( ),
( ) ( )
.
e
e
e
e
l
l
p
ze
e
l
l
e
q
W
p
u
d
N
p
N
p
d
q
q
N
p
N
p
d
q
ξ ξ ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ
ξ ξ
=
=
=
=
∫
∫
∫
∫
Wynik możemy zapisać jako
1
1
2
2
,
p
e
e
ze
e
e
q
W
F F
q
=
,
gdzie
0
( ) ( )
e
l
e
i
i
F
N
p
d
ξ ξ ξ
=
∫
,
(133)
e
i
F
nazywamy równoważnymi siłami węzłowymi od obciążenia ciągłego
p
rozłożonego na danym elemencie.
Budowa układu równań w przypadku pręta rozciąganego przebiega w sposób analogiczny do przedstawionego
poprzednio dla belek. W wyniku składania macierzy sztywności elementu dostajemy globalną macierz
sztywności
[ ]
K
. Po określeniu znanych elementów wektora sił węzłowych
{ }
F
dochodzimy do układu
równań:
{ } { }
[ ]
K
q
F
=
.
(134)
Elementy
i
F
wektora sił węzłowych oznaczają w równaniu (134) całkowite oddziaływanie zewnętrzne
odpowiadające i–temu stopniowi swobody. Ponieważ przed rozwiązaniem układu nie znamy wartości reakcji to
te spośród sił
i
F
, które odpowiadają odebranym stopniom swobody pozostają nieznane. Znane są natomiast
odpowiednie wartości przemieszczeń
i
q
. Po rozwiązaniu(134) znamy wszystkie składowe wektorów
{ }
q
i
{ }
F
, a więc przemieszczenia wszystkich węzłów i ich obciążenia, w tym reakcje podpór.
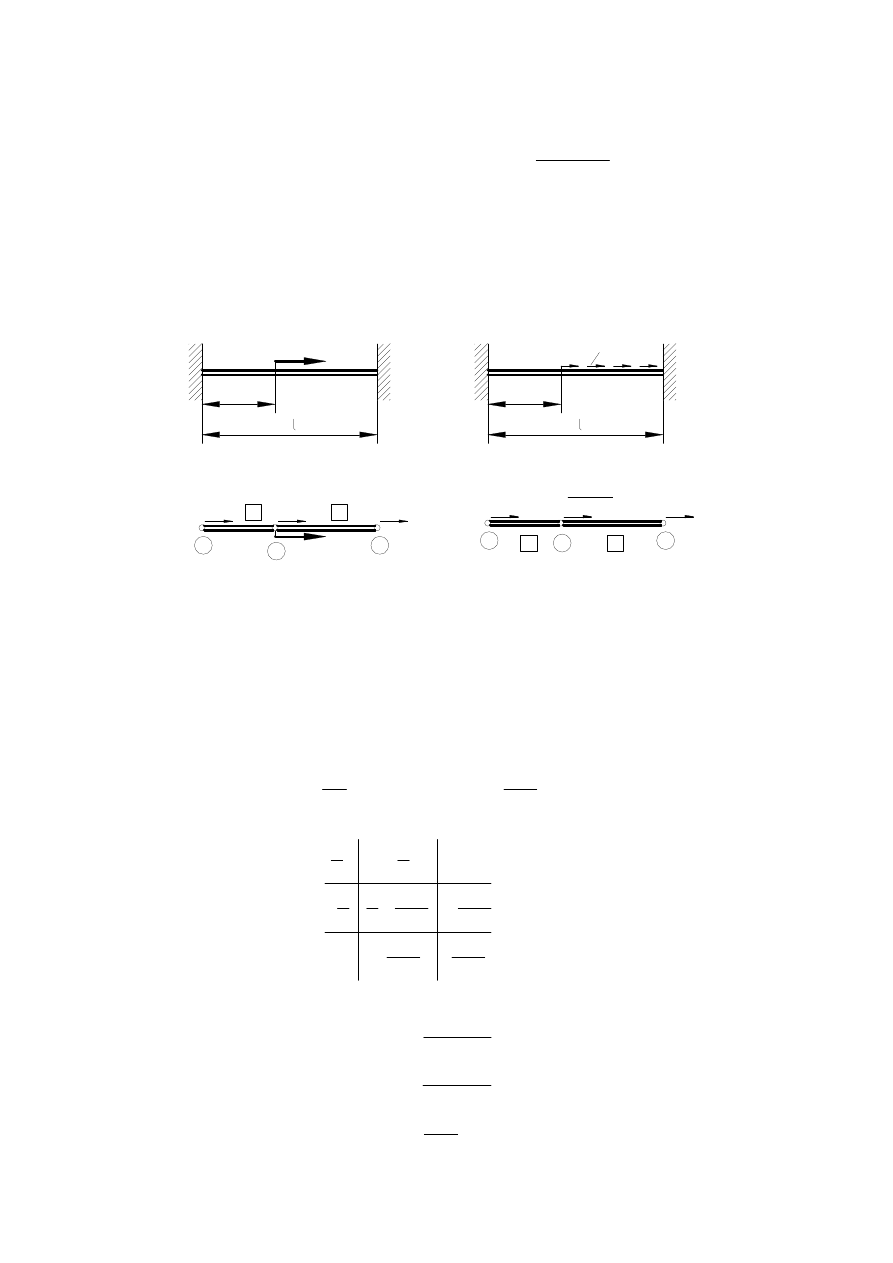
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
54
Jeśli interesują nas naprężenia w kolejnych elementach wykorzystujemy wzór
1
2
1
1
2
2
(
)
( ),
( )
e
e
q
E q
q
E
E N
N
q
l
σ
ε
ξ
ξ
−
′
′
=
=
=
.
(135)
Naprężenie w omawianym elemencie pręta rozciąganego jest więc zawsze stałe.
a
1
1
q =0
2
q
2
3
q =0
3
1
2
a
P
P
p
0
1
1
q =0
1
2
0
2
p (l-a)
3
q =0
2
2
a)
b)
Rys. 30. Obustronnie utwierdzony pręt obciążony: a) siłą skupioną
P
; b) obciążeniem ciągłym
0
p
(przykład 11)
P
RZYKŁAD
11
Obustronnie utwierdzony pręt o długości
l
jest obciążony siłą
P
przyłożoną w odległości
a
od jednej z podpór (rys. 30a).
Obliczyć przemieszczenie punktu przyłożenia siły i reakcje podpór.
Rozwiązanie:
Przyjmujemy najprostszy model, składający się z dwóch elementów skończonych. Ich macierze sztywności są równe:
[ ]
1
1
1
1
1
e
EA
k
a
−
=
−
[ ]
2
1
1
1
1
e
EA
k
l
a
−
=
−
−
.
Układ równań równowagi ma więc postać:
1
1
2
2
3
3
1
1
0
1
1
1
1
1
1
a
a
q
F
EA
q
F
a
a
l
a
l
a
q
F
l
a
l
a
−
−
+
−
=
−
−
−
−
−
.
Uwzględniając, że
1
3
0
q
q
=
=
a
2
F
P
=
2
1
3
(
)
,
(
)
,
.
P l
a a
q
EAl
P l
a
F
l
Pa
F
l
−
=
−
−
=
−
=
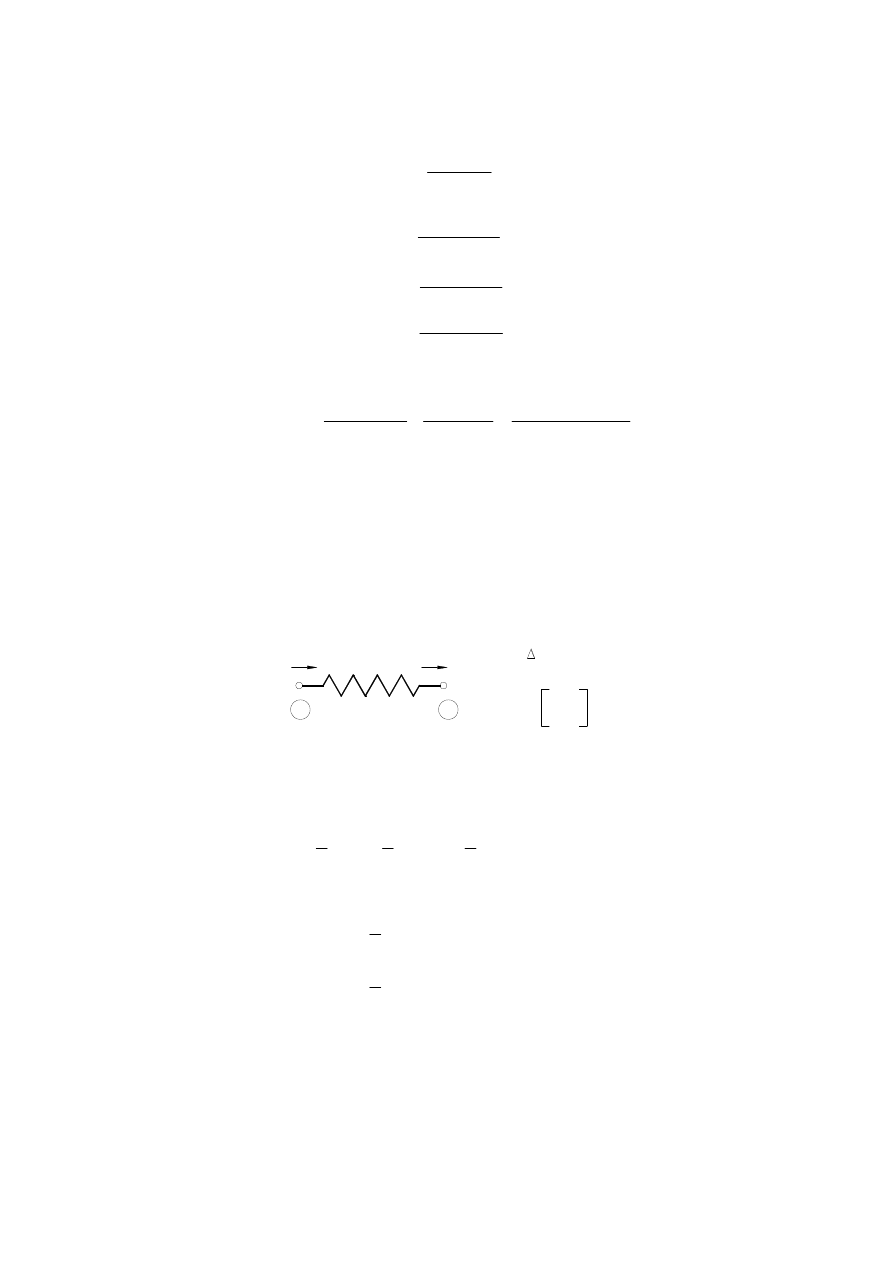
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
55
Ponieważ w węzłach 1 i 3 nie ma innych oddziaływań zewnętrznych to
1
F
i
3
F
stanowią wartości reakcji podpór.
Jeśli zmodyfikujemy zadanie przez zmianę obciążenia (rys. 30b) otrzymamy ze wzoru (133) równoważną siłę węzłową
0
2
(
)
2
p l
a
F
−
=
,
i po rozwiązaniu układu
2
0
2
(
)
2
p l
a a
q
lEA
−
=
,
2
0
1
(
)
2
p l
a
F
l
−
−
=
,
0
3
(
)
2
p a l
a
F
l
−
−
=
.
Reakcja w węźle pierwszym jest równa
1
F
natomiast żeby wyliczyć reakcję w węźle trzecim należy uwzględnić wartość
równoważnej siły węzłowej od obciążenia ciągłego przypadającą na ten węzeł:
0
0
0
1
1
(
)
(
)
(
)(
)
2
2
2
p a l
a
p l
a l
p l
a l
a
R
F
l
l
l
−
−
−
−
−
+
= =
−
=
.
Suma reakcji jest więc równa
1
3
0
(
)
R
R
p l
a
+
= −
−
.
Warto zauważyć, że rozwiązanie dla pręta z rysunku 30a jest rozwiązaniem ścisłym a dla pręta z rysunku 30b rozwiązaniem
przybliżonym.
Macierz sztywności sprężyny o sztywności
k
(rys. 31) możemy określić w podobny sposób jak dla pręta
rozciąganego.
1
2
q =u
1
1
q =u
2
2
k
F=k u=k(u -u )
*
[k] =k 1 -1
-1 1
2
1
e
Rys. 31. Sprężyna jako element skończony
Energia odkształcenia sprężystego jest równa
2
2
1
2
1
1
1
1
(
)
(
)(
)
2
2
2
e
U
F u
k
u
k u
u
u
u
=
∆ =
∆
=
−
−
.
(136)
Wynik możemy zapisać w postaci
[ ]
{ }
1
1
2
2
1
,
,
2
1
,
2
e
e
e
e
e
u
k
k
U
u u
u
k
k
U
q
k
q
−
=
−
=
gdzie
[ ]
e
k
k
k
k
k
−
=
−
,
(137)
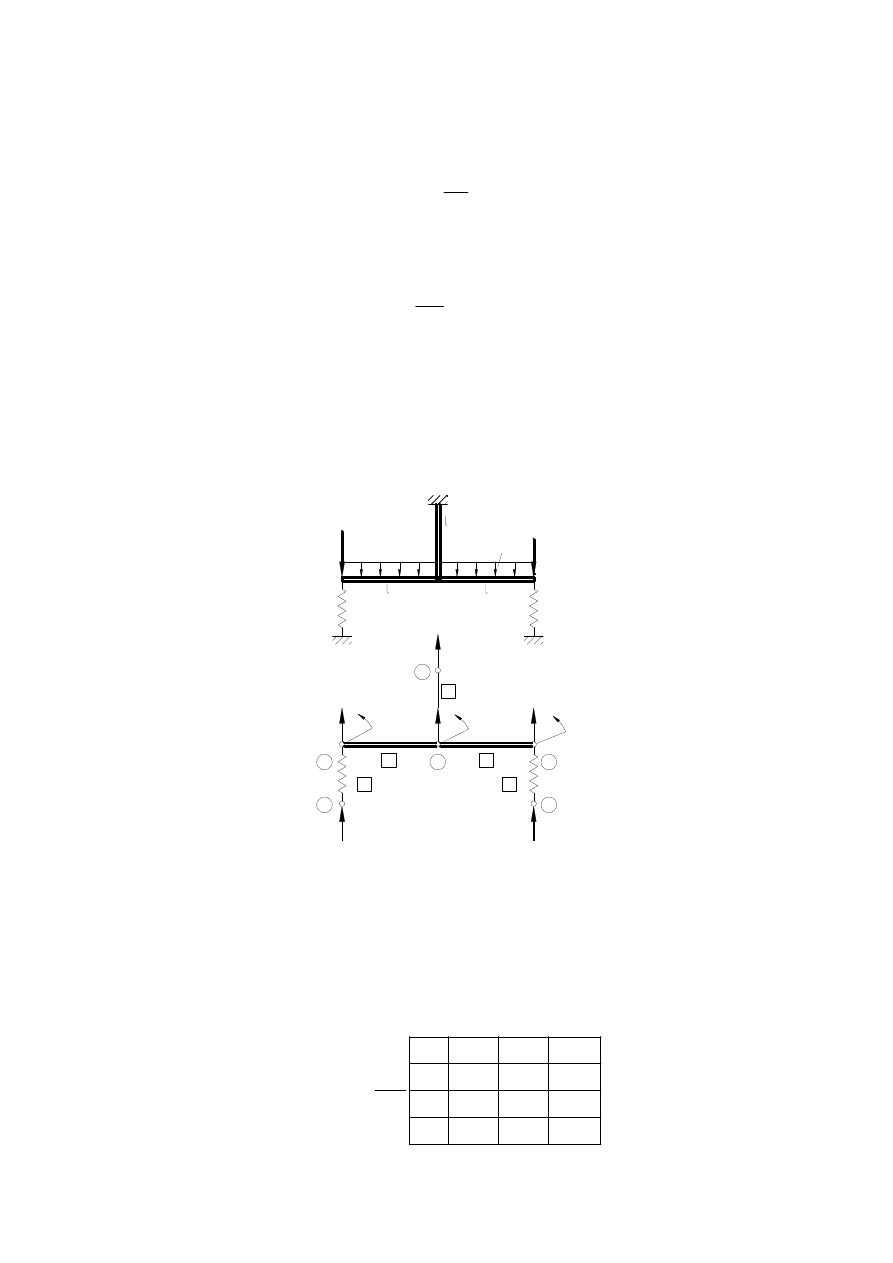
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
56
jest macierzą sztywności elementu skończonego sprężyny. Macierz (137) można też otrzymać
bezpośrednio z macierzy sztywności pręta rozciąganego (132) podstawiając
k
l
EA
e
=
.
Postępując w podobny sposób łatwo znajdziemy macierz sztywności elementu pręta skręcanego, w którym
mamy dwa stopnie swobody kąty skręcenia końców:
[ ]
1
1
1
1
s
e
e
GI
k
l
−
=
−
,
(138)
gdzie
s
GI
jest sztywnością pręta na skręcanie.
Znając formuły określające macierze sztywności dla różnych elementów konstrukcyjnych możemy w
standardowy sposób analizować konstrukcje złożone. Macierz
[ ]
K
układu równań metody elementów
skończonych jest budowana z uwzględnieniem przyjętej numeracji węzłów i stopni swobody. Zmiana numeracji
stopni swobody zmieni sam układ równań nie zmieniając oczywiście wyników zadania.
1
3
0
p
k
1
1
1
2
k
2
2
1
q
7
q
q
2
3
q
4
q
5
q
6
q
4
8
q
q
9
5
6
1
2
3
P
P
1
2
4
5
Rys. 32. Model MES konstrukcji złożonej z różnych elementów konstrukcyjnych
(przykład 12)
P
RZYKŁAD
12
Sformułować układ równań
[ ]
{ } { }
F
q
K
=
dla konstrukcji składającej się z belki, dwóch sprężyn i pręta rozciąganego
(rys. 32).
Rozwiązanie
Przyjmijmy podział belki na 2 elementy skończone. Model konstrukcji obejmuje dodatkowe 2 elementy skończone
odpowiadające sprężynom oraz element pręta rozciąganego. Model opisany jest przez 9 stopni swobody
i
q
. Macierze
sztywności elementów belkowych są określone przez wzór:
[ ] [ ]
2
1
1
2
1
1
2
1
1
2
1
1
2
1
1
1
1
3
1
2
1
2
3
3
3
6
3
6
3
2
3
3
6
3
6
2
l
l
l
l
l
l
l
l
l
l
l
l
l
EI
k
k
e
e
−
−
−
−
−
−
=
=
.
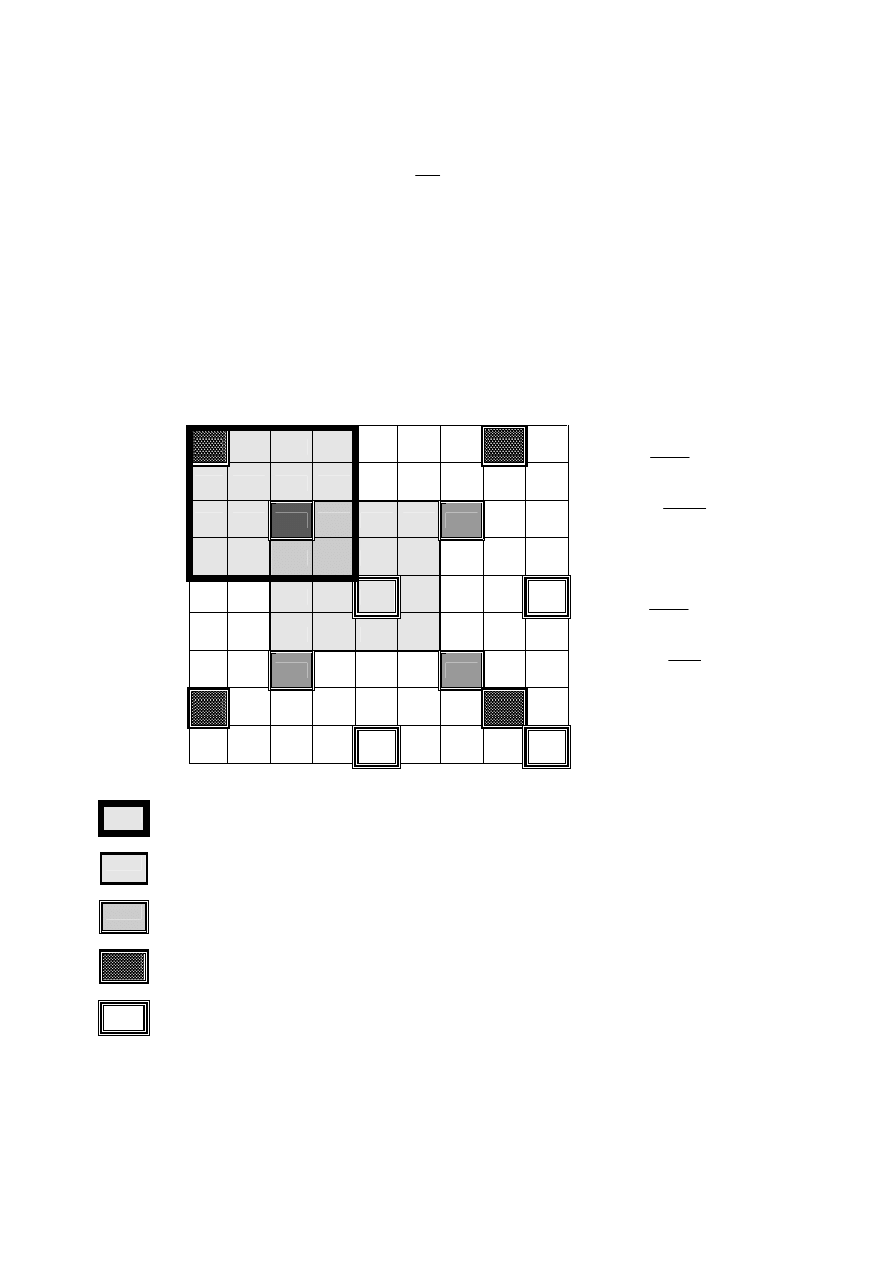
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
57
Stopnie swobody elementu pierwszego to
1
2
3
4
,
,
,
q q q q
, a elementu drugiego
6
5
4
3
,
,
,
q
q
q
q
.
Macierz sztywności elementu pręta rozciąganego jest równa
[ ]
−
−
=
1
1
1
1
2
3
l
EA
k
e
.
Stopnie swobody tego elementu w globalnym wektorze to
3
q
i
7
q
.
Macierze sztywności sprężyn są równe:
[ ]
−
−
=
1
1
1
1
1
4
k
k
e
[ ]
5
2
1
1
1
1
e
k
k
−
=
−
,
a odpowiadające im stopnie swobody to
8
q
i
1
q
oraz
9
q
i
5
q
.
Układ równań
[ ]
{ } { }
K
q
F
=
dla przyjętej numeracji stopni swobody będzie miał postać:
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
0 1
1
2
1
0 1
2
0 1
3
4
0 1
5
2
6
2
0 1
7
8
9
2
12
0
2
0
12
0
0
p l
P
q
p l
q
p l
q
q
p l
q
P
q
p l
F
F
F
−
−
−
= −
−
–
elementy macierzy szt. elementu 1 (belka),
–
elementy macierzy szt. elementu 2 (belka),
–
elementy macierzy szt. elementu 3 (pręt),
–
elementy macierzy szt. elementu 4 (sprężyna),
–
elementy macierzy szt. elementu 5 (sprężyna).
Macierz układu równań
[ ]
K
można zapisać stosując symbole
m
ij
k
, oznaczające składowe
)
,
( j
i
macierzy sztywności
elementu skończonego
m
.
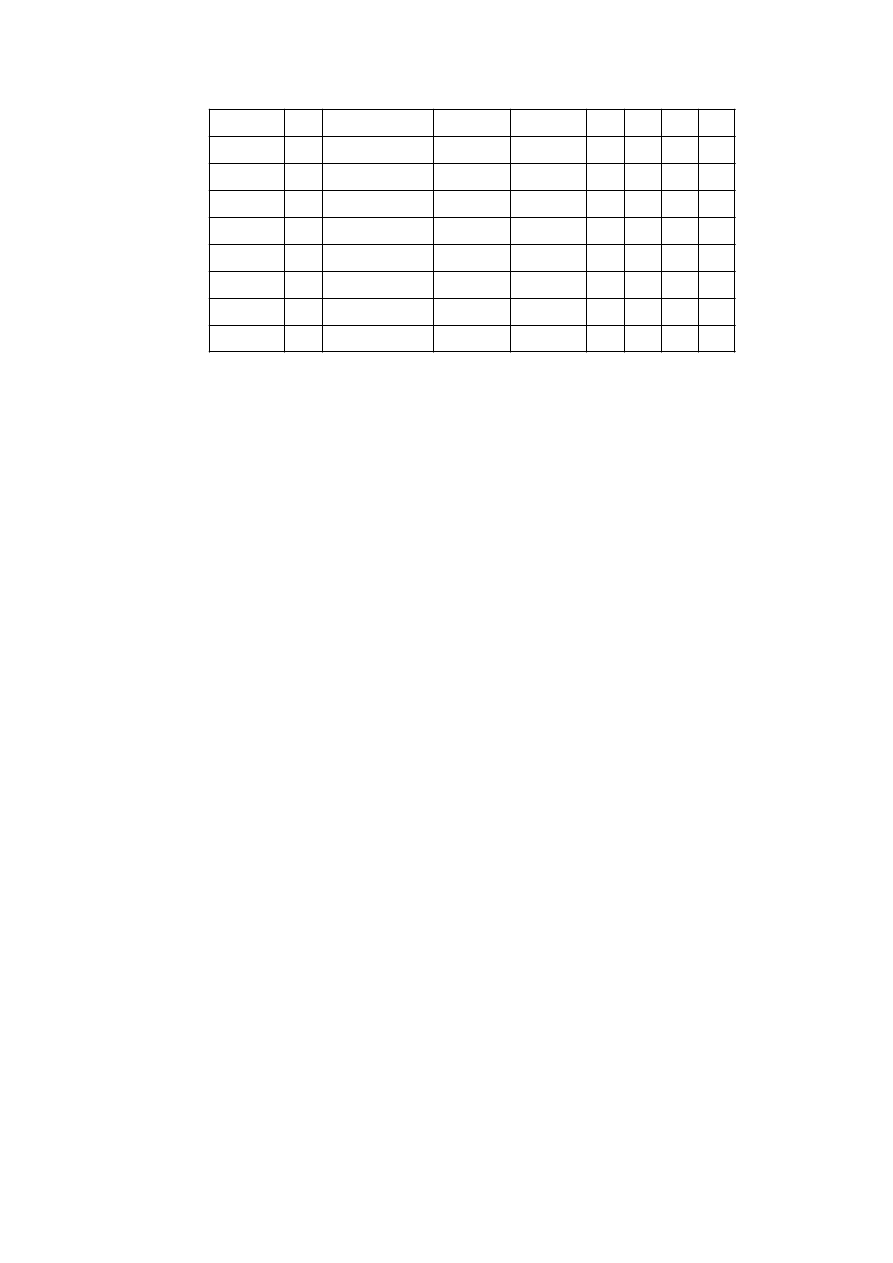
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
58
[ ]
1
4
1
1
1
4
11
22
12
13
14
12
1
1
1
1
21
22
23
24
1
1
1
2
3
1
2
2
2
3
31
32
33
11
11
34
12
13
14
12
1
1
1
2
1
2
2
2
41
42
43
21
44
22
23
24
2
2
2
5
2
5
31
32
33
22
34
12
2
2
2
2
9 9
41
42
43
44
3
3
21
11
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
K
×
+
+
+
+
+
+
=
+
4
4
21
11
5
5
21
11
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
k
k
k
k
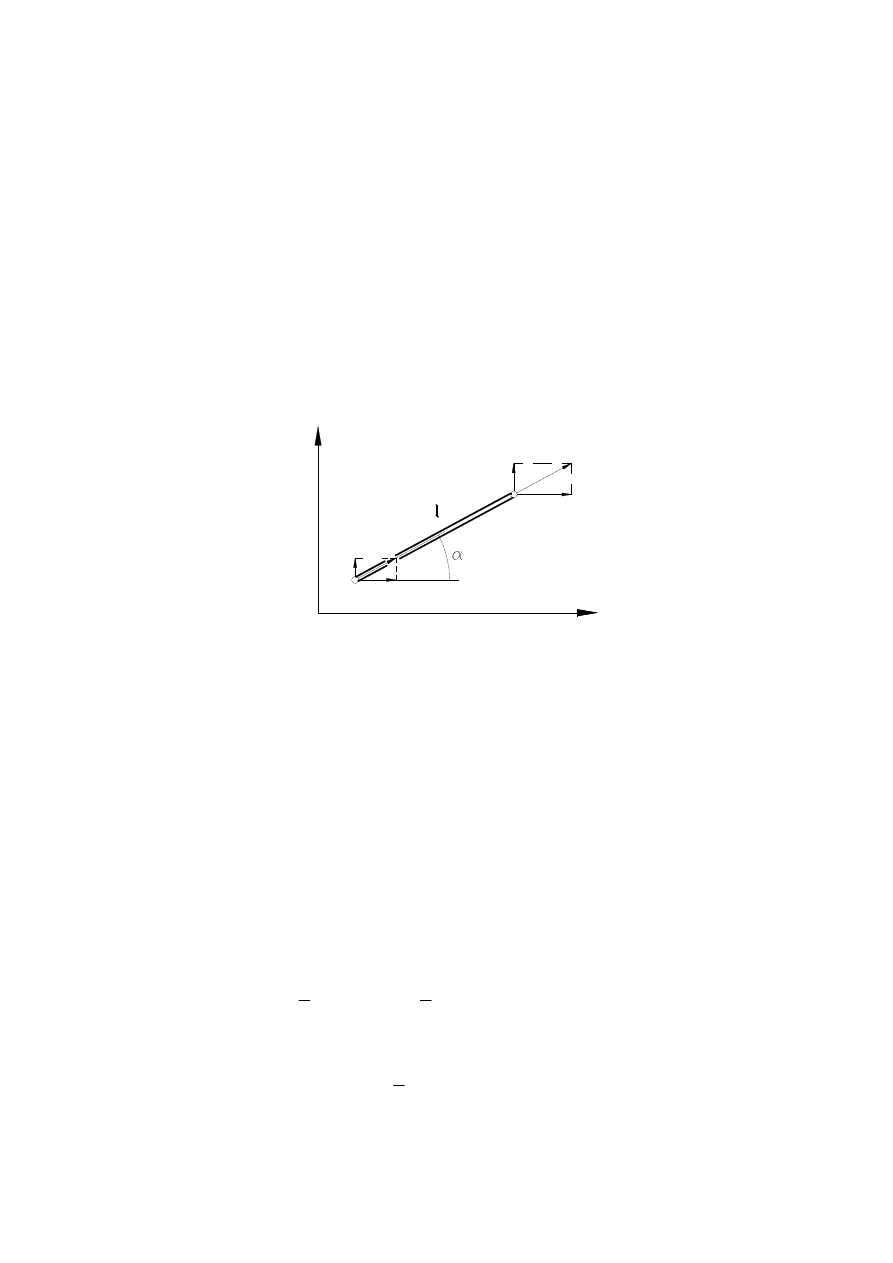
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
59
5.3. KRATOWNICE I RAMY PŁASKIE
Związki obowiązujące w poszczególnych prętowych elementach skończonych, a także kierunki przemieszczeń
uogólnionych opisywane były dotychczas w lokalnych, elementowych układach współrzędnych. W takich
konstrukcjach jak na przykład kratownica, gdzie musimy zapewnić ciągłość przemieszczeń na połączeniach
między różnie nachylonymi prętami wygodniejsze jest stosowanie globalnego układu współrzędnych. Załóżmy,
ż
e analizowany pręt (element) kratownicy jest nachylony pod kątem
α
w stosunku do osi
x
globalnego
kartezjańskiego układu współrzędnych (rys. 33). Poszukujemy związków między lokalnymi stopniami swobody
elementu
1
2
,
e
e
q
q q
=
(przemieszczenia wzdłuż osi pręta), a stopniami swobody tego elementu w
globalnym układzie współrzędnych
1
1
2
2
, ,
,
g
e
e
q
u
u
υ
υ
=
.
x
y
q
1
q
2
v
1
v
2
u
2
u
1
e
Rys. 33. Element skończony pręta kratownicy
Dla obu węzłów elementu
)
2
,
1
(
=
i
otrzymujemy
1
cos
sin
i
i
q
u
α υ
α
=
+
.
(139)
Poszukiwany związek ma więc postać:
1
1
1
2
2
2
cos
sin
0
0
0
0
cos
sin
e
e
u
q
q
u
υ
α
α
α
α
υ
=
,
(140)
czyli
{ }
[ ]
{ }
e
q
k
e
q
T
q
=
.
(141)
Energię sprężystą elementu można więc zapisać w formie
[ ]
{ }
[ ] [ ] [ ]
{ }
1 2
4 2
2 4
2 1
2 2
2 2
4 1
1 4
1
1
2
2
T
T
q
e
q
k
k
e
e
e
e
e
q
U
q
k
q
q
k
T
T
×
×
×
×
×
×
×
×
=
=
,
(142)
lub
{ }
1
2
e
q
g
q
e
e
e
U
q
k
q
=
,
(143)
gdzie
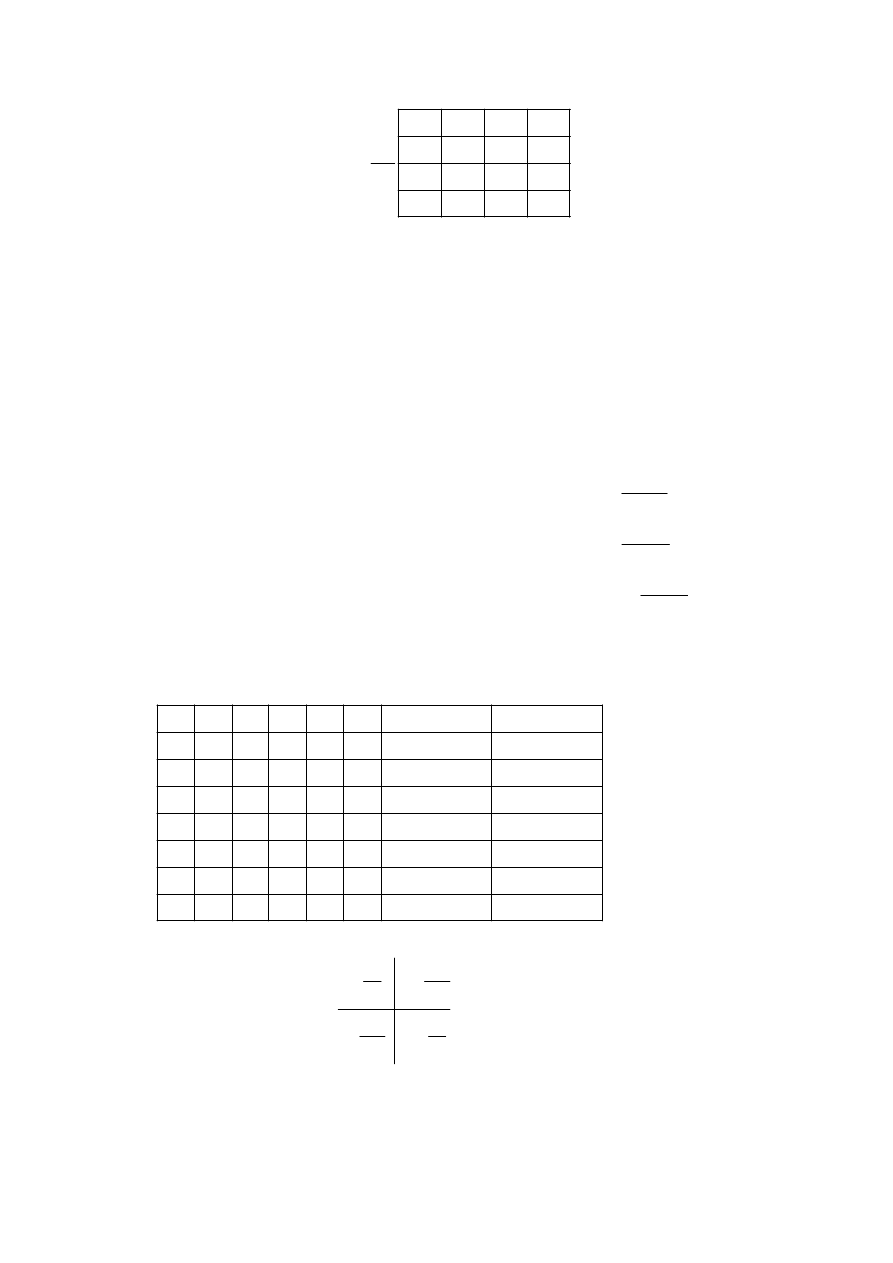
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
60
2
2
2
2
2
2
2
2
sin ,
cos
g
e
e
c
sc
c
sc
sc
s
sc
s
EA
k
c
sc
c
sc
l
sc
s
sc
s
s
c
α
α
−
−
−
−
=
−
−
−
−
=
=
.
(144)
Otrzymaliśmy więc macierz sztywności elementu kratownicy w globalnym układzie współrzędnych
kartezjańskich. Kratownica płaska o
LW
węzłach ma więc
LW
2
stopnie swobody odpowiadające pionowym
i poziomym przemieszczeniom wszystkich węzłów.
P
RZYKŁAD
13.
Zbudować układ równań MES dla kratownicy z rysunku 34. Jakie jest przemieszczenie węzła 4 jeśli
2
1
β
β
=
a siła
P
przyłożona jest poziomo
)
0
(
=
γ
.
Rozwiązanie
Ustrój składa się z trzech elementów.
Element 1 określany przez węzły 1i 4 jest nachylony pod kątem
1
1
β
α
=
i ma długość
1
1
cos
α
l
l
=
.
Element 2 określony przez węzły 2 i 4 jest nachylony pod kątem
0
2
=
α
i ma długość
2
2
cos
α
l
l
=
.
Element 3 określony przez węzły 3 i 4 jest nachylony pod kątem
2
3
β
α
−
=
i ma długość
3
3
cos
α
l
l
=
.
Każda z macierzy sztywności tych elementów
[ ] [ ] [ ]
3
2
1
,
,
e
ij
e
ij
e
ij
k
k
k
jest zdefiniowana przez wzór (144) gdzie
e
l
i
α
są
długością i kątem nachylenia odpowiednich elementów.
Pełny układ równań ma więc postać:
1
1
1
1
11
12
13
14
1
1
1
1
21
22
23
24
2
2
2
2
11
12
13
14
2
2
2
2
21
22
23
24
3
3
3
3
11
12
13
14
3
3
3
3
21
22
23
24
1
1
2
2
3
3
1
2
3
1
2
3
31
32
31
32
31
32
33
33
33
34
34
34
1
1
2
2
3
3
1
41
42
41
42
41
42
43
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
+
+
+
+
1
2
3
4
5
6
7
2
3
1
2
3
8
43
43
44
44
44
0
0
0
0
0
0
cos
sin
F
F
F
F
F
F
q
P
q
k
k
k
k
k
P
γ
γ
=
+
+
+
+
.
Uwzględniając, że
0
j
q
=
dla
1, 6
j
=
możemy układ zredukować do
2
3
3
7
1
1
2
3
3
8
1
1
sin
cos
i
i i
i
i
i
i
i i
i
i
i
i
i
c
s c
q
P
l
l
EA
s c
s
q
P
l
l
γ
γ
=
=
=
=
=
∑
∑
∑
∑
.
Zakładając, że
1
2
β
β
β
=
=
i
0
γ
=
mamy
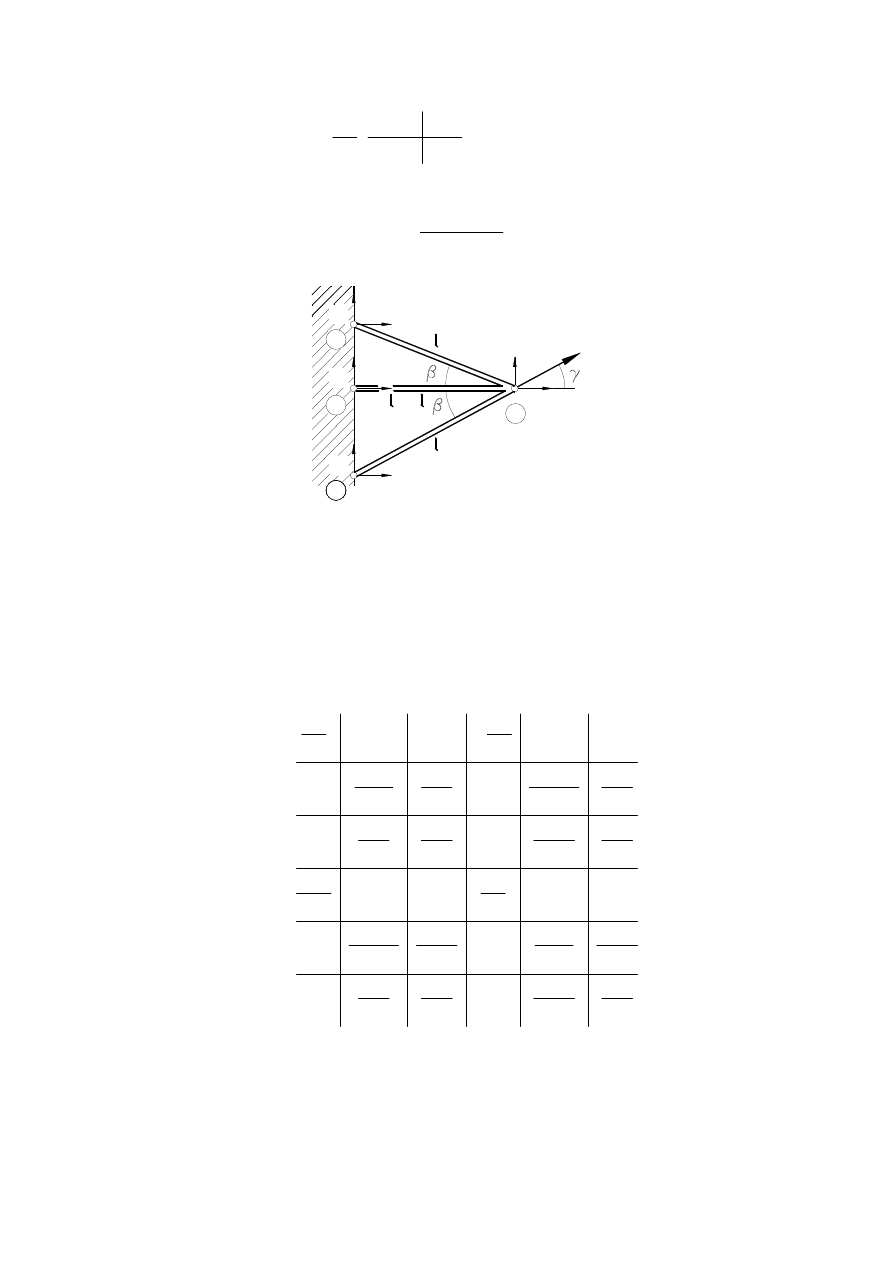
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
61
3
7
2
8
1 2
0
0
2
0
c
q
P
EA
s c
q
l
+
=
,
gdzie
cos
c
β
=
,
sin
s
β
=
.
Stąd
7
3
(1 2 )
Pl
q
EA
c
=
+
,
8
0
q
=
.
q
1
1
q
2
8
q
q
7
4
q
q
3
6
q
q
5
3
2
=
2
1
1
4
2
3
P
Rys. 34. Kratownica z przykładu 13
Związki otrzymane dla elementu pręta rozciąganego i belki mogą być wykorzystane do budowy elementu
skończonego ramy dwuwymiarowej. Element ramy możemy potraktować jako strukturę będącą połączeniem
elementu belki i pręta. Przyjmując numerację stopni swobody z rysunku 35a i wykorzystując znane macierze
sztywności belki (115) i pręta rozciąganego (132) otrzymamy macierz sztywności elementu ramy płaskiej:
[ ]
3
2
3
2
2
2
3
2
3
2
2
2
0
0
0
0
12
6
12
6
0
0
6
4
6
2
0
0
0
0
0
0
12
6
12
6
0
0
6
2
6
4
0
0
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
e
EA
EA
l
l
EI
EI
EI
EI
l
l
l
l
EI
EI
EI
EI
l
l
l
l
k
EA
EA
l
l
EI
EI
EI
EI
l
l
l
l
EI
EI
EI
EI
l
l
l
l
−
−
−
=
−
−
−
−
−
.
(145)
Element ten ma więc 6 stopni swobody a jego deformacja jest określona przez przemieszczenia
( )
u
ξ
i
( )
w
ξ
w lokalnym układzie współrzędnych związanym z węzłami 1 i 2 (rys. 35b).
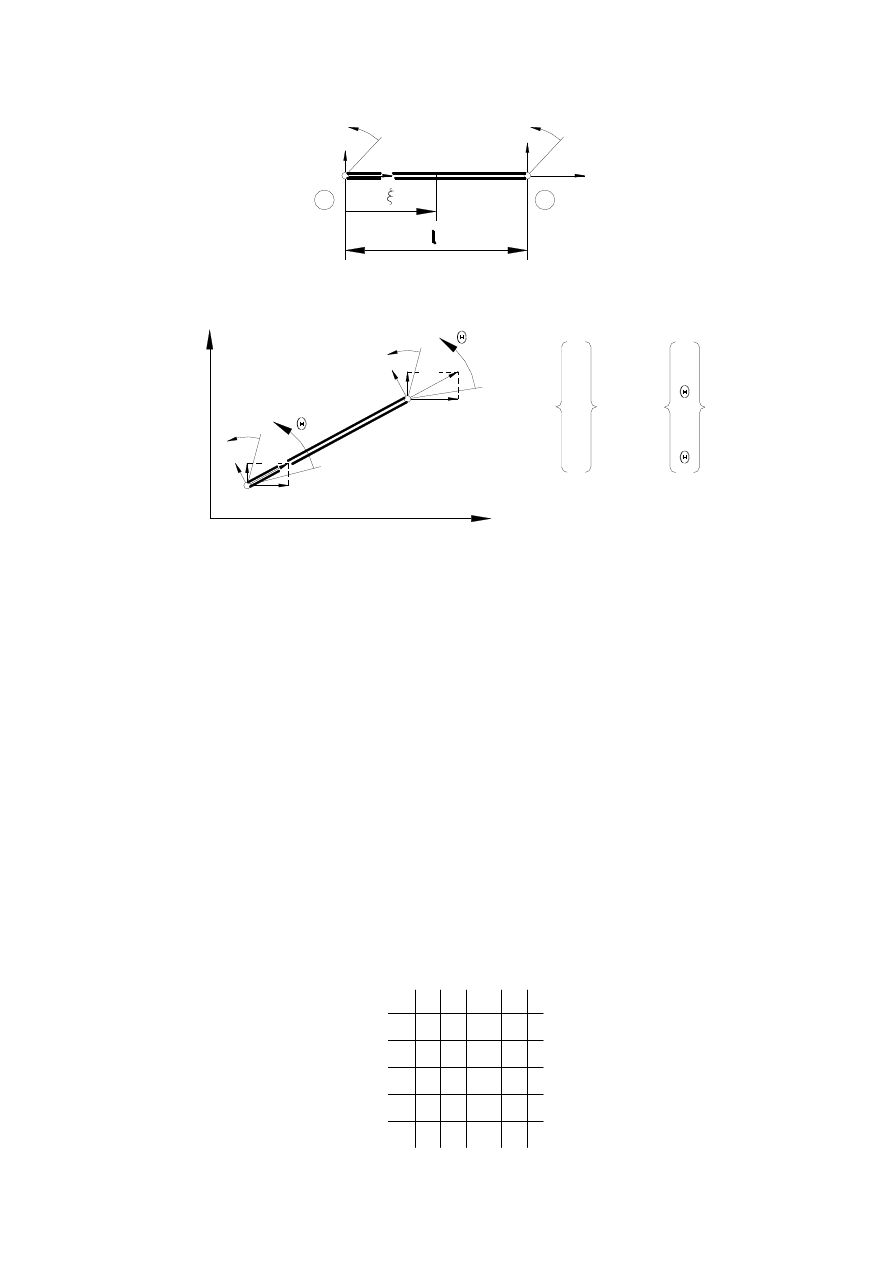
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
62
x
y
q
1
q
4
v
1
v
2
u
2
u
1
l
e
q
2
1
2
5
q
q
3
6
q
q
1
q
2
q
3
q
4
q
5
q
6
{q} =
e
v
2
2
u
e
{q } =
v
u
2
1
1
1
g
q
1
q
4
e
q
2
5
q
q
3
6
q
1
2
a)
b)
Rys. 35. Element ramy dwuwymiarowej (a); Stopnie swobody elementu ramy w układzie lokalnym {q}
e
i
globalnym {q
g
}
e
(b)
Łatwo stwierdzić, że przemieszczenia uogólnione np. węzła 1 w lokalnym i globalnym układzie współrzędnych
wiążą zależności:
1
1
1
2
1
1
3
1
cos
sin ,
sin
cos ,
.
q
u
q
u
q
α υ
α
α υ
α
θ
=
+
= −
+
=
Otrzymamy stąd zależności:
[ ]
[ ]
{ }
1
1
2
1
3
1
4
2
5
2
6
2
r
r
g
e
e
q
u
q
q
T
T
q
q
u
q
q
υ
θ
υ
θ
=
=
⋅
,
(146)
gdzie macierz transformacji
[ ]
r
T
ma postać
[ ]
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
r
c
s
s
c
T
c
s
s
c
−
=
−
.
(147)
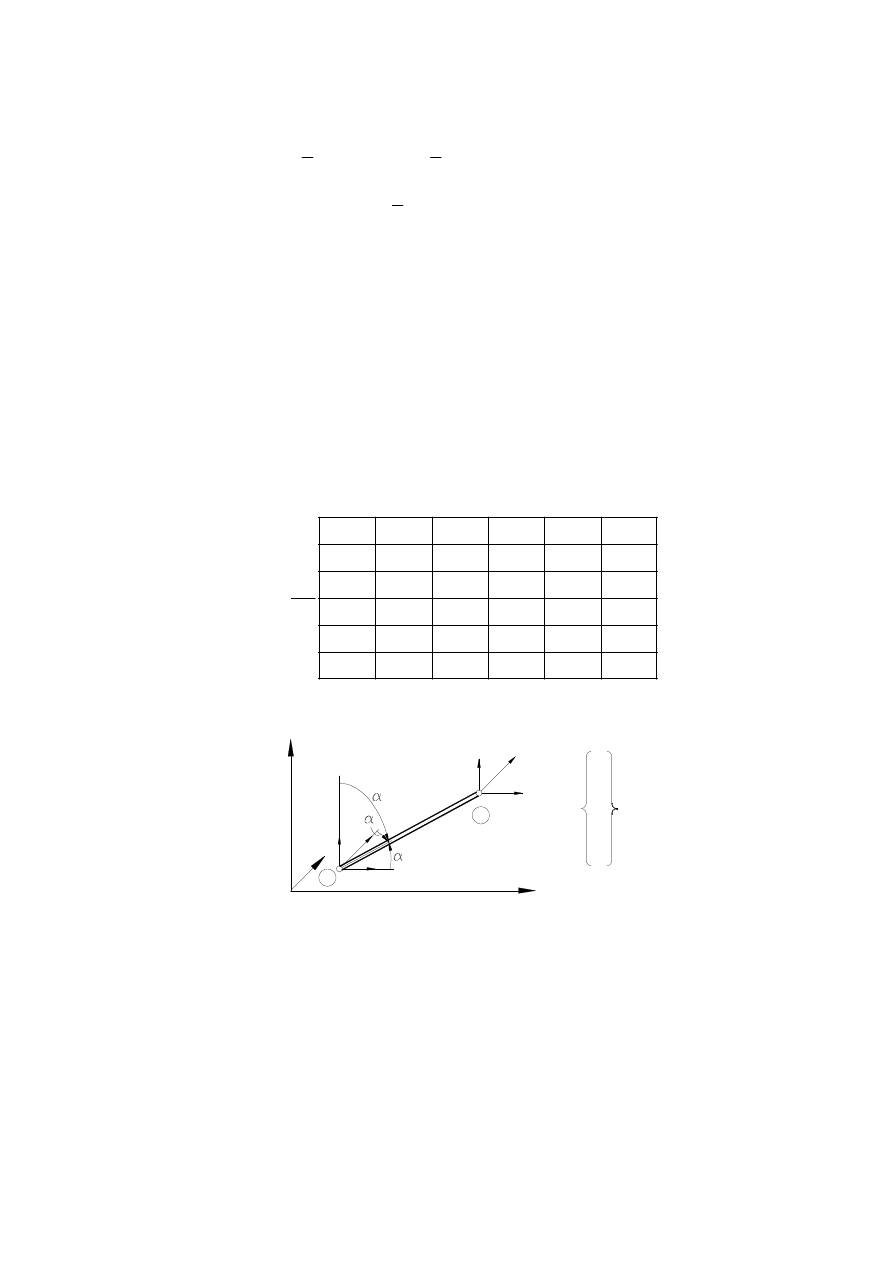
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
63
Energia sprężysta zgromadzona w elemencie jest równa
[ ]
{ }
[ ] [ ] [ ]
{ }
{ }
1
1
,
2
2
1
,
2
T
e
g
r
r
g
e
e
e
e
e
e
g
e
g
g
e
e
e
U
q
k
q
q
T
k
T
q
U
q
k
q
=
=
=
(148)
gdzie
[ ] [ ] [ ]
T
g
r
e
e
k
T
k
T
=
,
(149)
jest macierzą sztywności elementu ramy dwuwymiarowej w globalnym układzie współrzędnych.
5.4. PRZESTRZENNE KRATOWNICE I RAMY
Związki otrzymane dla kratownic i ram dwuwymiarowych można stosunkowo łatwo uogólnić na
konstrukcje trójwymiarowe. Przyjmijmy oznaczenia dla elementu kratownicy trójwymiarowej przedstawione na
rysunku 36. Postępując podobnie jak w przypadku dwuwymiarowym otrzymamy macierz sztywności w układzie
globalnym x,y,z:
2
2
2
2
2
2
2
2
2
2
2
2
x
x
y
x z
x
x
y
x z
x
y
y
y z
x
y
y
y z
x z
y
z
z
x z
y
z
z
g
e
x
x
y
x z
x
x
y
x z
e
x
y
y
y z
x
y
y
y z
x z
y
z
z
x z
y z
z
c
c c
c c
c
c c
c c
c c
c
c c
c c
c
c c
c c
c c
c
c c
c c
c
EA
k
c
c c
c c
c
c c
c c
l
c c
c
c c
c c
c
c c
c c
c c
c
c c
c c
c
−
−
−
−
−
−
−
−
−
=
−
−
−
−
−
−
−
−
−
,
(150)
gdzie
cos
x
x
c
α
=
,
cos
y
y
c
α
=
,
cos
z
z
c
α
=
.
x
z
w
1
w
2
u
2
u
1
{q} =
e
v
w
2
2
u
v
w
u
2
1
1
1
y
v
1
2
v
x
y
z
1
2
Rys. 36. Element skończony kratownicy trójwymiarowej
Macierz sztywności elementu belki 3-wymiarowej (rys. 37) można zbudować przez złożenie znanych już
macierzy sztywności dla rozciągania (132), skręcania (138) i zginania (115).
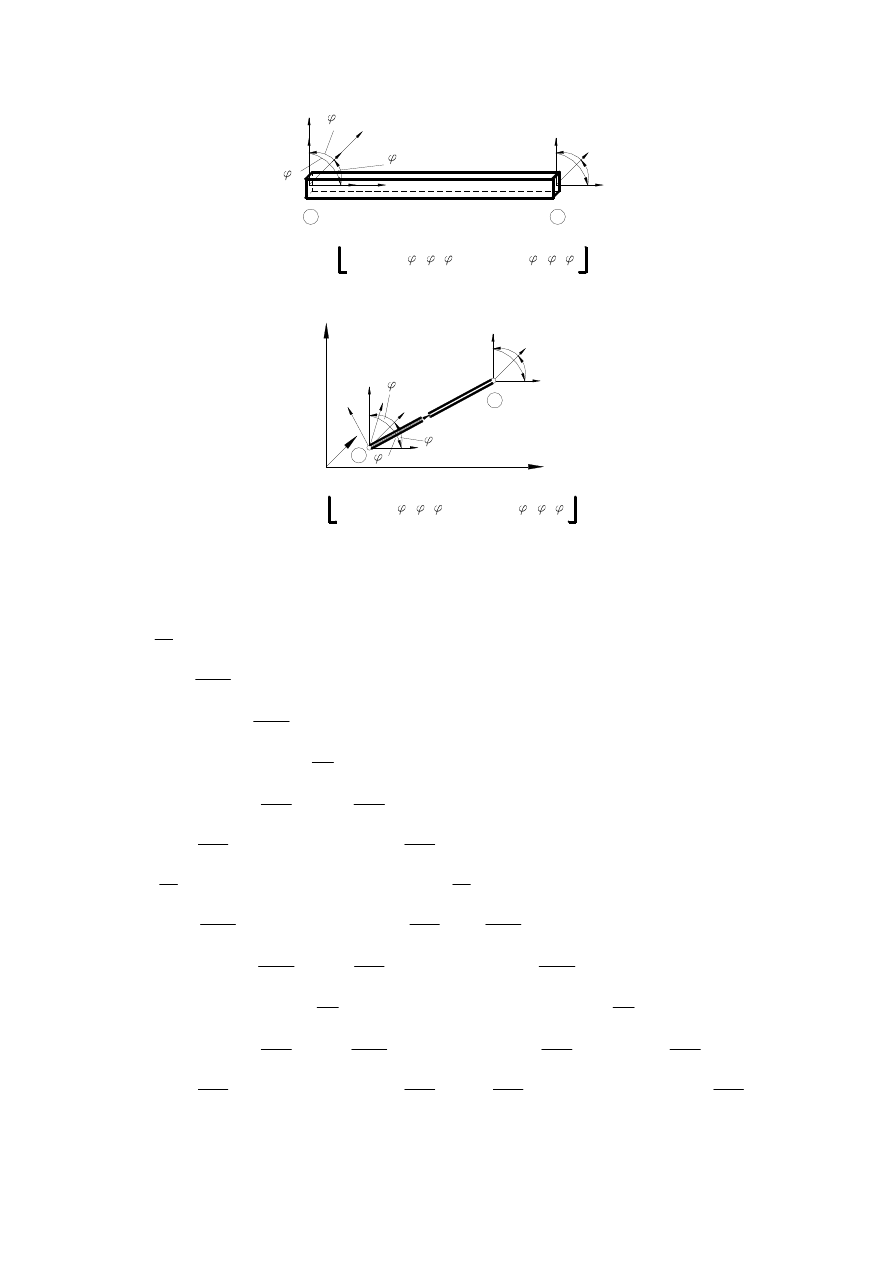
G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
64
x
z
w
1
w
2
u
2
u
1
{q} = u , v , w , , , , u , v , w , , ,
e
y
v
1
2
v
1
1
z
1
2
x'
z'
y'
x
1
y
1
y
1
z
1
x
1
1
1
2
2
2
x
y
z
2
2
2
{q} = u , v , w , , , , u , v , w , , ,
e
1
1
x'
1
1
y'
z'
1
1
2
2
2
x'
y'
2
2
z'
2
'
'
'
'
'
'
2
v
u
2
w
2
w'
v'
1
u'
1
2
1
1
x'
z'
y'
x'
1
z'
1
y'
1
T
T
Rys. 37. Element ramy trójwymiarowej w układzie lokalnym współrzędnych
x y z
′ ′ ′
w układzie globalnym xyz
W układzie lokalnym
z
y
x
′
′
′
,
,
, związanym z osią wzdłużną pręta i położeniem głównych osi bezwładności
przekroju ma ona postać:
[ ]
3
3
2
2
3
2
3
3
2
3
macierz
symetryczna
12
0
12
0
0
0
0
0
6
4
0
0
0
6
4
0
0
0
0
0
0
0
0
0
12
6
12
0
0
0
0
0
12
12
6
0
0
0
0
0
0
0
0
0
0
0
0
0
0
6
0
0
e
z
e
y
e
s
e
y
y
e
e
z
z
e
e
e
e
e
z
z
z
e
e
e
y
y
z
e
e
e
s
s
e
e
y
EA
l
EI
l
EI
l
GI
l
EI
EI
l
l
EI
EI
l
l
k
EA
EA
l
l
EI
EI
EI
l
l
l
EI
EI
EI
l
l
l
GI
GI
l
l
EI
l
′
′
′
′
′
′
′
′
′
′
′
′
′
−
=
−
−
−
−
−
−
2
2
2
2
2
6
4
12
0
0
0
0
0
6
2
6
4
0
0
0
0
0
0
0
0
y
y
z
e
e
e
z
z
z
z
e
e
e
e
EI
EI
EI
l
l
l
EI
EI
EI
EI
l
l
l
l
′
′
′
′
′
′
′
−
(151)

G
RZEGORZ
K
RZESIŃSKI
.
MES_1.
C
ZĘŚĆ
1.
MATERIAŁY DO WYKŁADU
.
65
Rozwiązywanie trójwymiarowych konstrukcji prętowych metodą elementów skończonych jest
obliczeniowo złożone: jeden element skończony kratownicy ma 6 stopni swobody, a ramy 12 stopni swobody.
Dlatego nawet proste obliczenia wykonywane są technikami komputerowymi. Warto tu podkreślić, że
wykonywanie wszelkich obliczeń metodą elementów skończonych bez zastosowania komputera jest zwykle
nieefektywne i ma jedynie znaczenie dydaktyczne, poznawcze. Atutem metody jest uniwersalizm podejścia i
prosta automatyzacja obliczeń uzyskane kosztem dużej liczby operacji arytmetycznych potrzebnych do
otrzymania rozwiązania.
Wyszukiwarka
Podobne podstrony:
drPera miedzynarodowe stosunki gospodarcze notatki do wykladow
H.G. - wykład 10, Notatki do wykładów z Historii Gospodarczej (dr M
NOTATKI do wykładów, III, IV, V ROK, SEMESTR II, WPROWADZENIE DO PSYCHOFIZJOLOGII, notatki
Algebra notatki do wykładu all
notatki do wykładów dla kursantów
Metody numeryczne dla inżynierów (notatki do wykładów)
2011 notatki do wykladu sem Iid Nieznany (2)
dynamika budowli notatki do wykładów[1] (1)
H.G. - wykład 11, Notatki do wykładów z Historii Gospodarczej (dr M
H.G. - wyklad 4, Notatki do wykładów z Historii Gospodarczej (dr M
drPera miedzynarodowe stosunki gospodarcze notatki do wykladow
Historia filozofii PWSZ notatki do wykladow
notatki do wykładów szacka r 16 18
dynamika budowli notatki do wykładów[1] (1)
Urządzenia nawigacyjne - Notatka do Kolokwium z wykładów, Akademia Morska, I semestr, urządzenia naw
Materiały pomocnicze do wykładów, FiR, Notatki, Rynki finansowe
więcej podobnych podstron