

Ciało odkształcone ma nieskończenie wiele stopni
swobody. Aby bowiem określić położenie ciała
odkształcalnego, trzeba znać położenie wszystkich jego
punktów, których wzajemne odległości mogą ulec zmianie.
Ciało odkształcalne pozostaje w spoczynku, jeśli każda
dowolna wyodrębniona z niego część jest w równowadze.
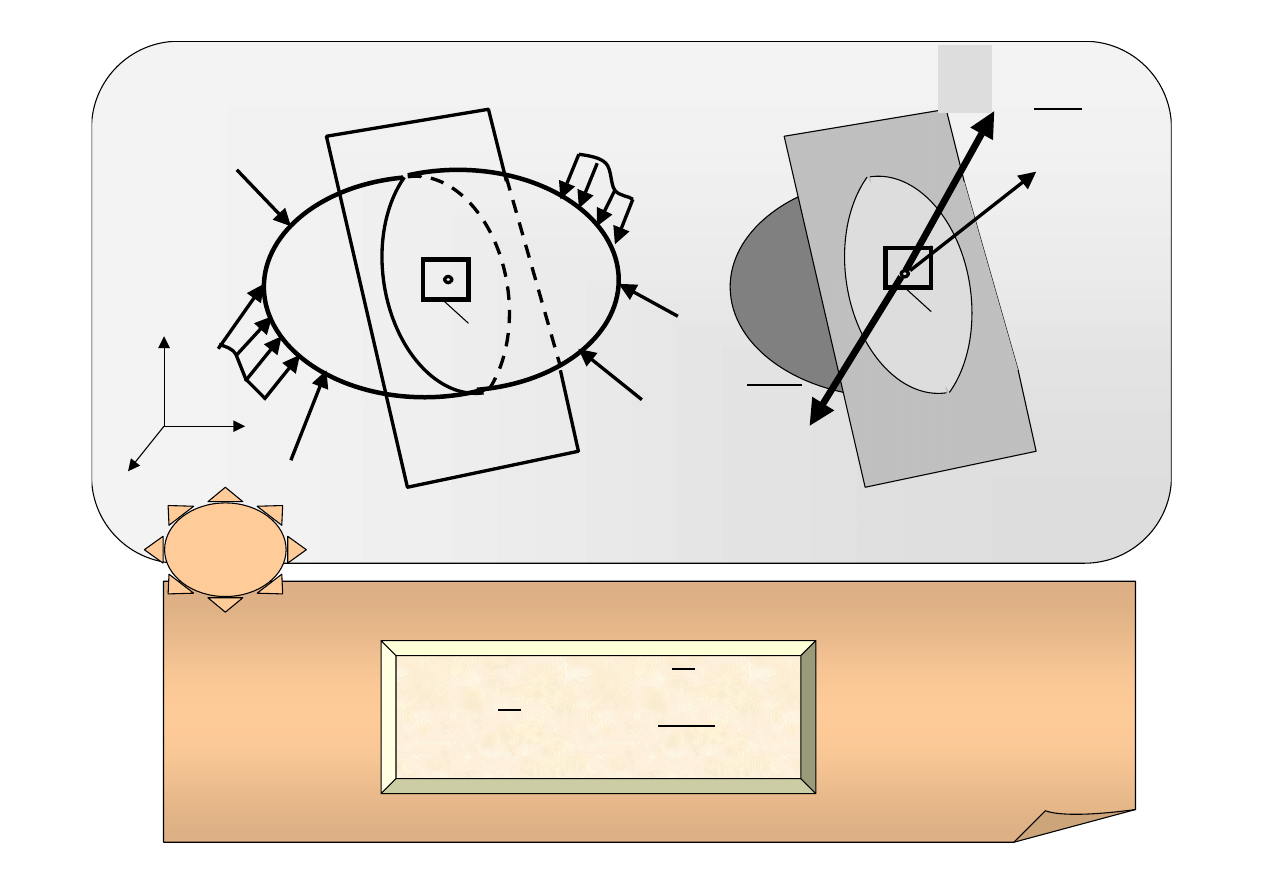
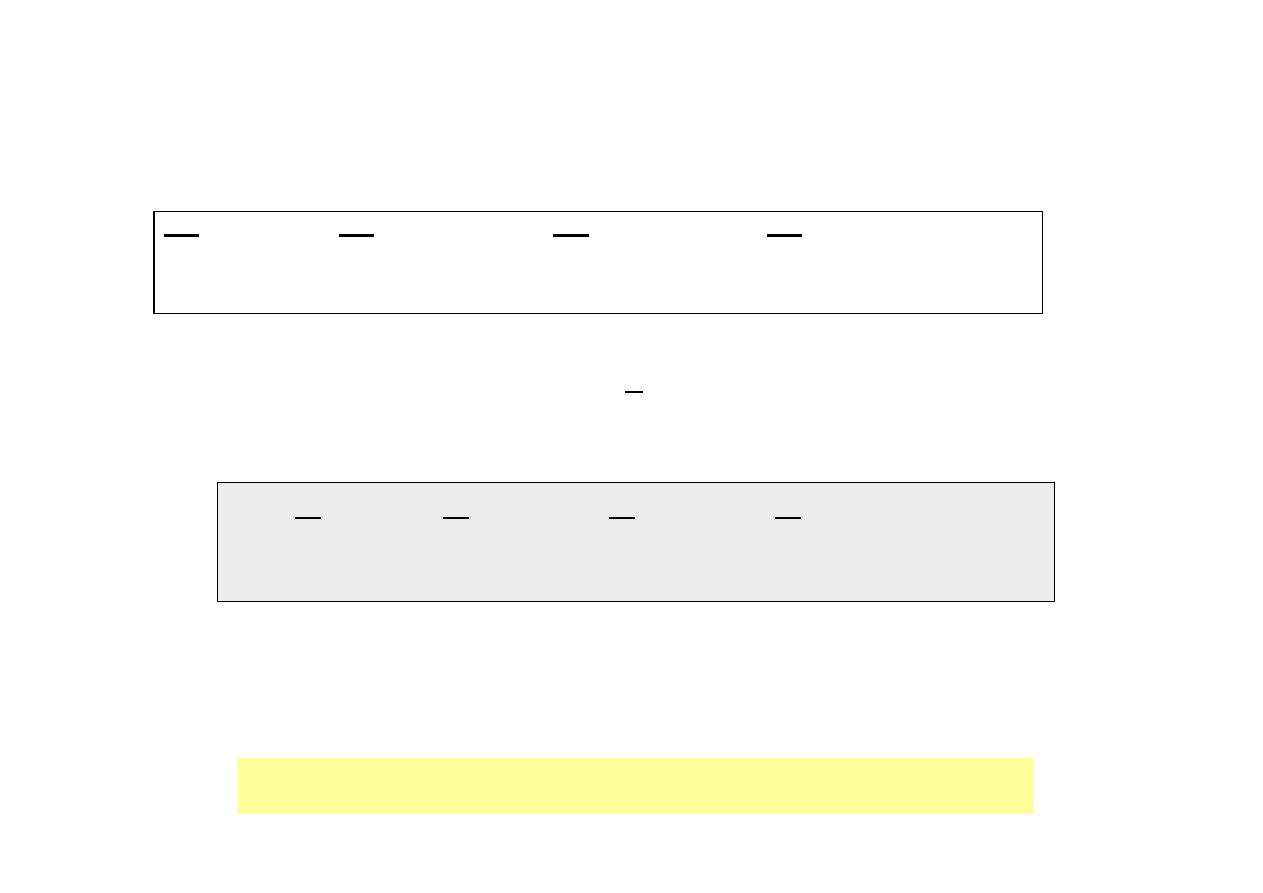
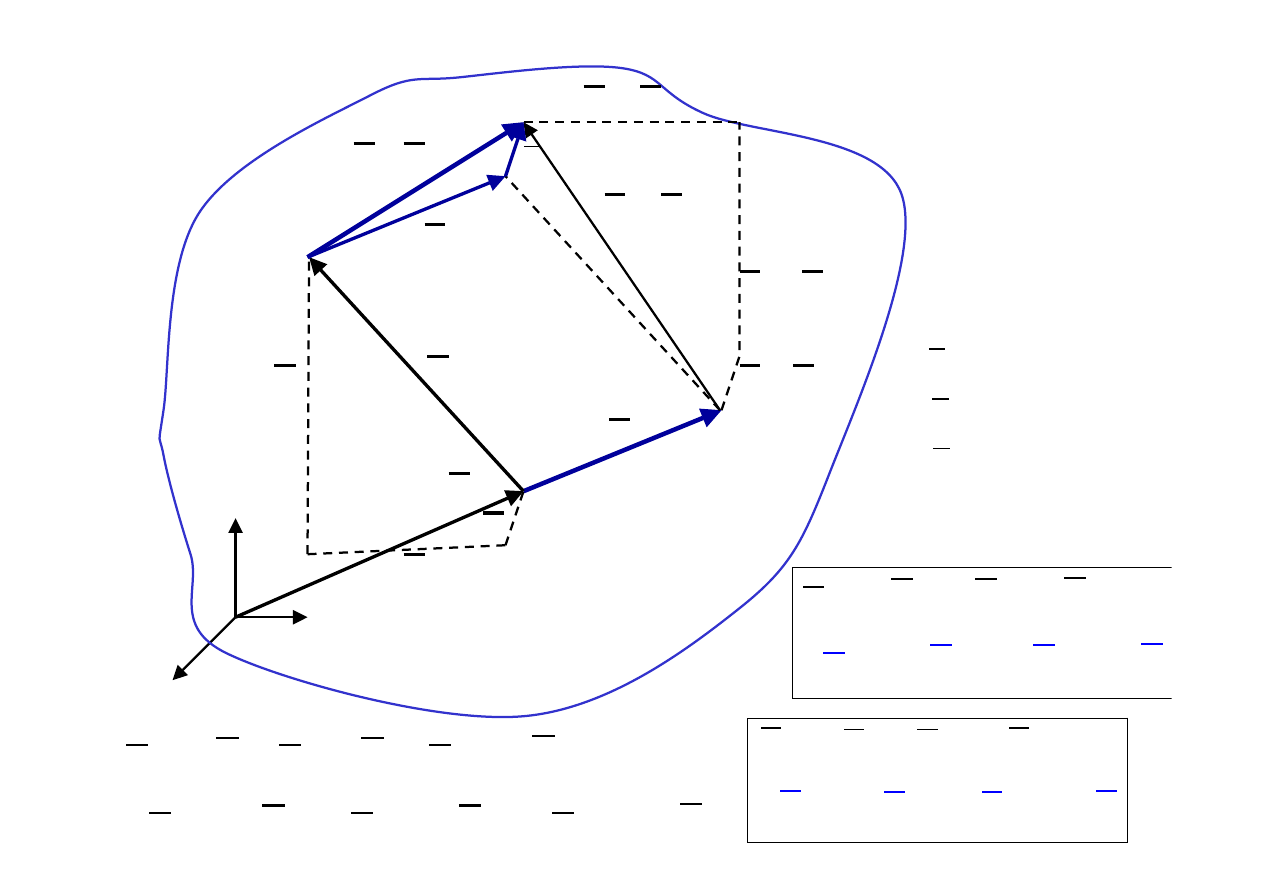
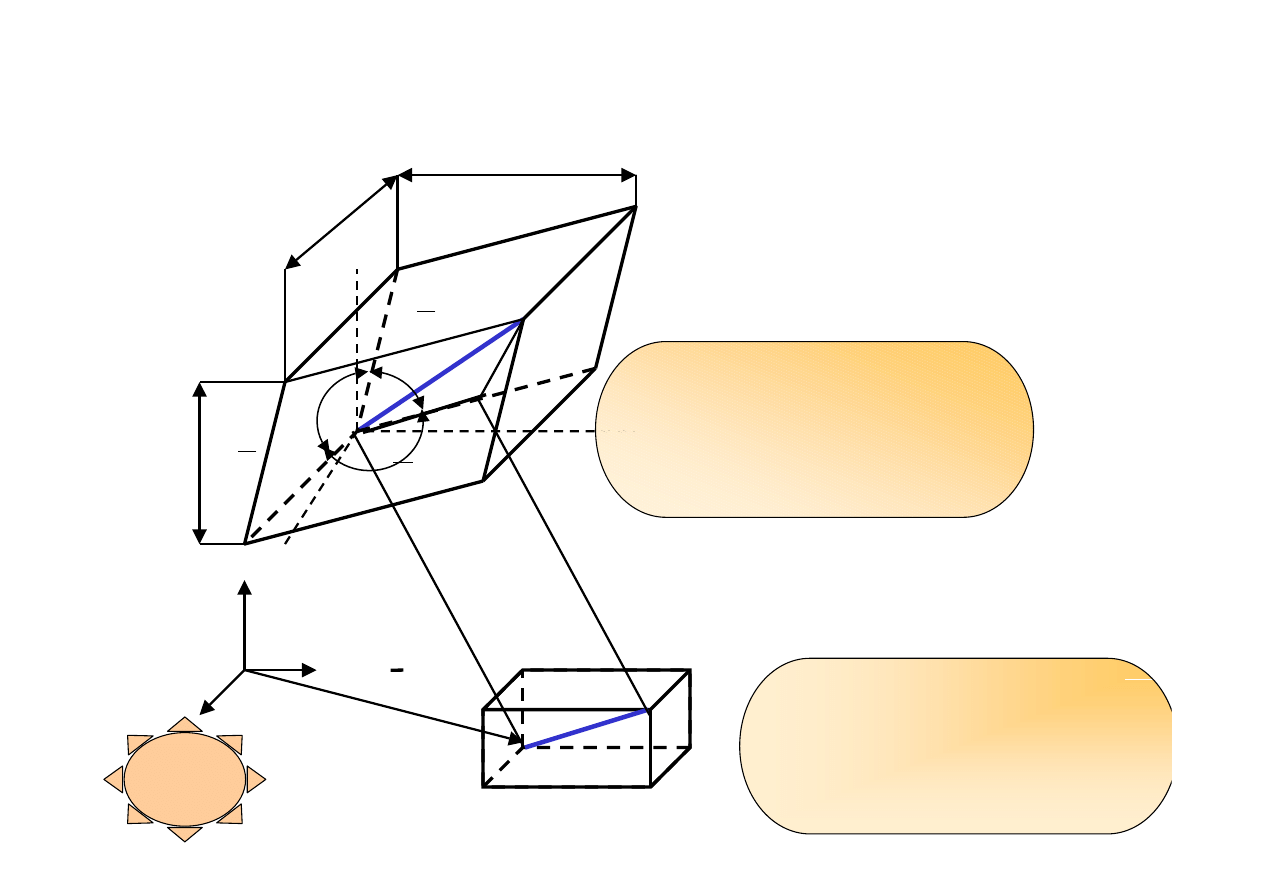
Rozważymy najbliższe małe otoczenie punktu B ciała
odkształcalnego w stanie spoczynku, ograniczone dowolną
powierzchnią zamkniętą (rys.1)
Przykład
Przykład
ΔA
B
ΔA
m
m
n
n
B
z
x
y
μ
μ
−
p
μ
P
Rys.1
(1)
(1)
0
lim
A
P
p
A
μ
μ
Δ →
=
Δ
μ
p
μ
μ
p
A
Δ
- podaje kierunek i zwrot zewnętrznej osi normalnej;
- wektor naprężenia całkowitego;
- element powierzchni przekroju w otoczeniu punktu
σ
τ
μ
p
τ
σ
μ
+
=
p
2
2
p
τ
σ
μ
+
=
σ
- wektor naprężenia normalnego
;
;
τ
- wektor naprężenia stycznego
Rys.1.b
(2)
(2)
Zbiór
wektorów naprężeń całkowitych
wektorów naprężeń całkowitych
działających we
wszystkich tych płaszczyznach (albo co na jedno wychodzi,
przyporządkowanych wszystkim kierunkom ) tworzy
stan napr
stan napr
ęż
ęż
enia w punkcie
enia w punkcie
B
B
ciała.
p
p
μ
μ
μ
μ
Zauważmy, że płaszczyzna przechodząca przez punkt B i
prostopadła do kierunku dzieli ciało na części „l” i „p”
μ
−
p
μ
p
−
μ
p
Wektor jest miarą lokalnego oddziaływania mechanicznego
części „p” na „l”, a wektor = części „l” na „p” ciała
w punkcie B rozważanego przekroju.
Aby określić
stan naprężenia w punkcie ciała
stan naprężenia w punkcie ciała
, należy podać
sposób jednoznacznego przyporządkowania jednoznacznemu
kierunkowi
odpowiadającego mu
wektora naprężenia
całkowitego
(który działa na płaszczyźnie prostopadłej do ).
Zajmiemy się teraz znalezieniem takiego sposobu
przyporządkowania.
μ
p
μ
μ
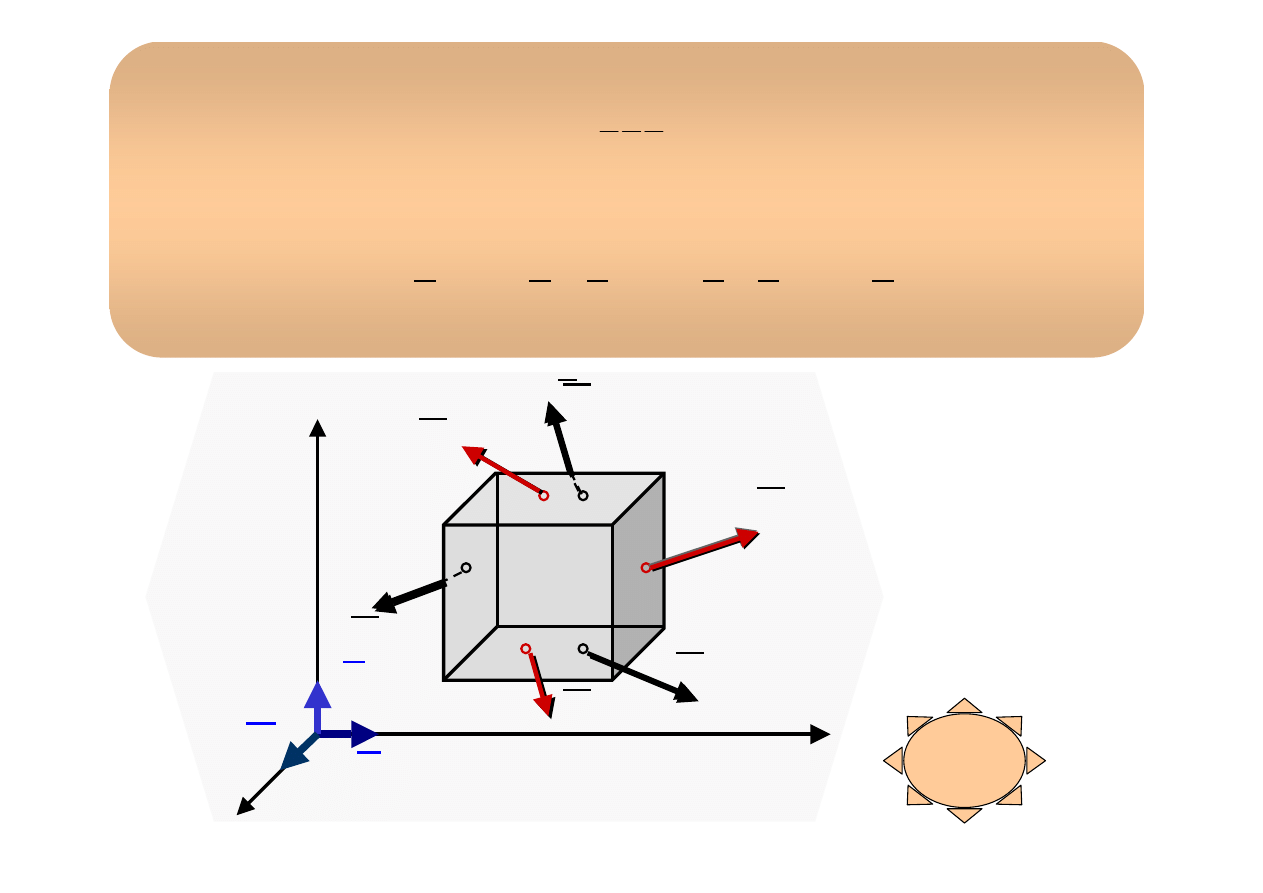
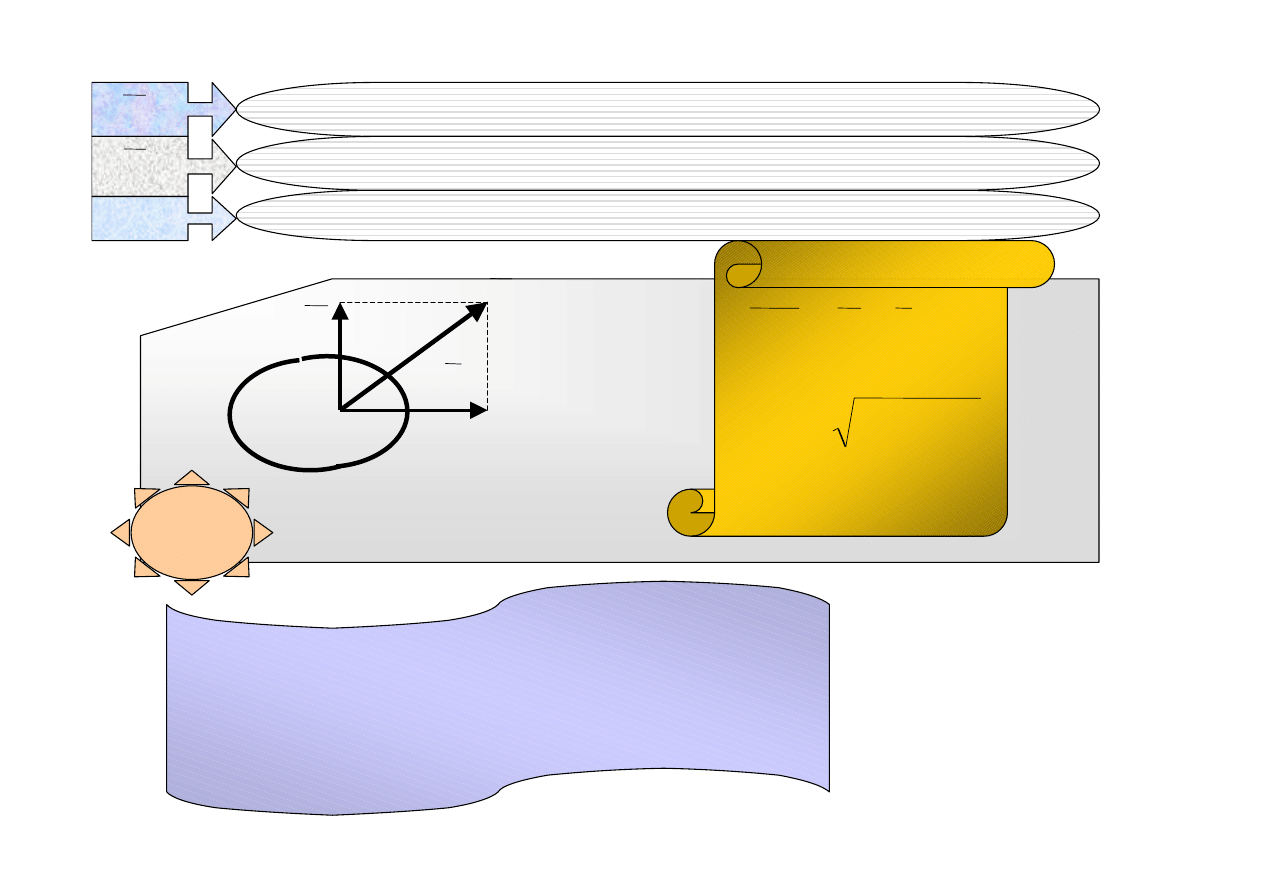
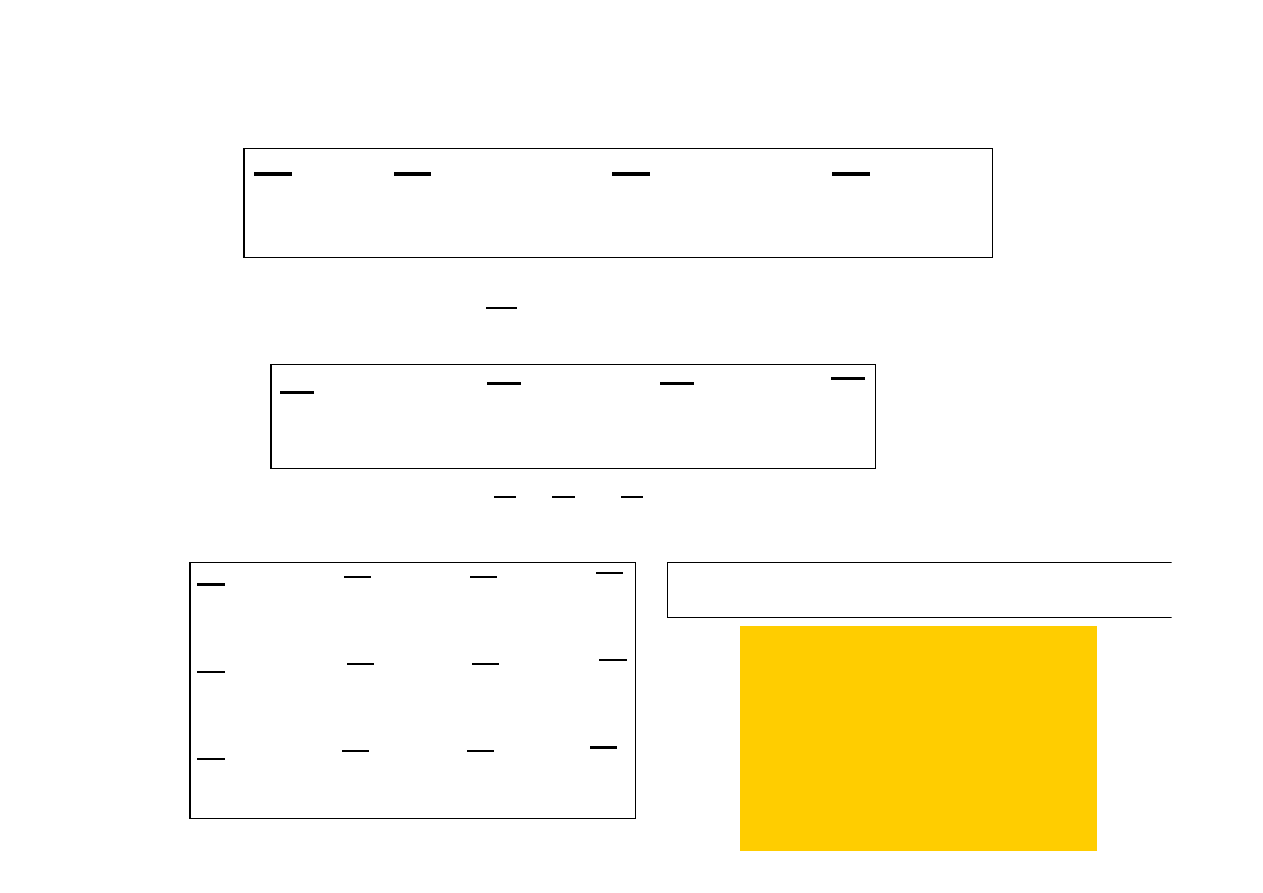
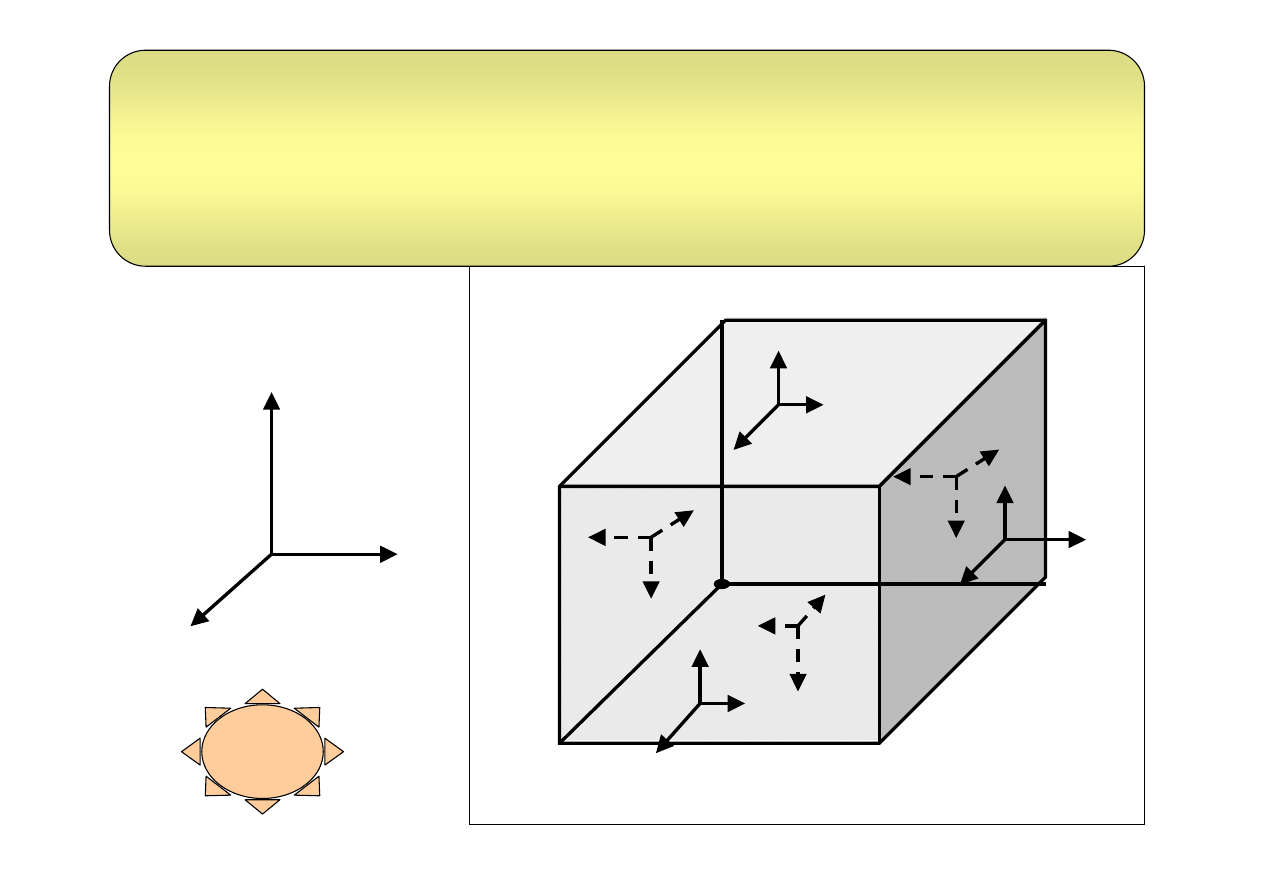
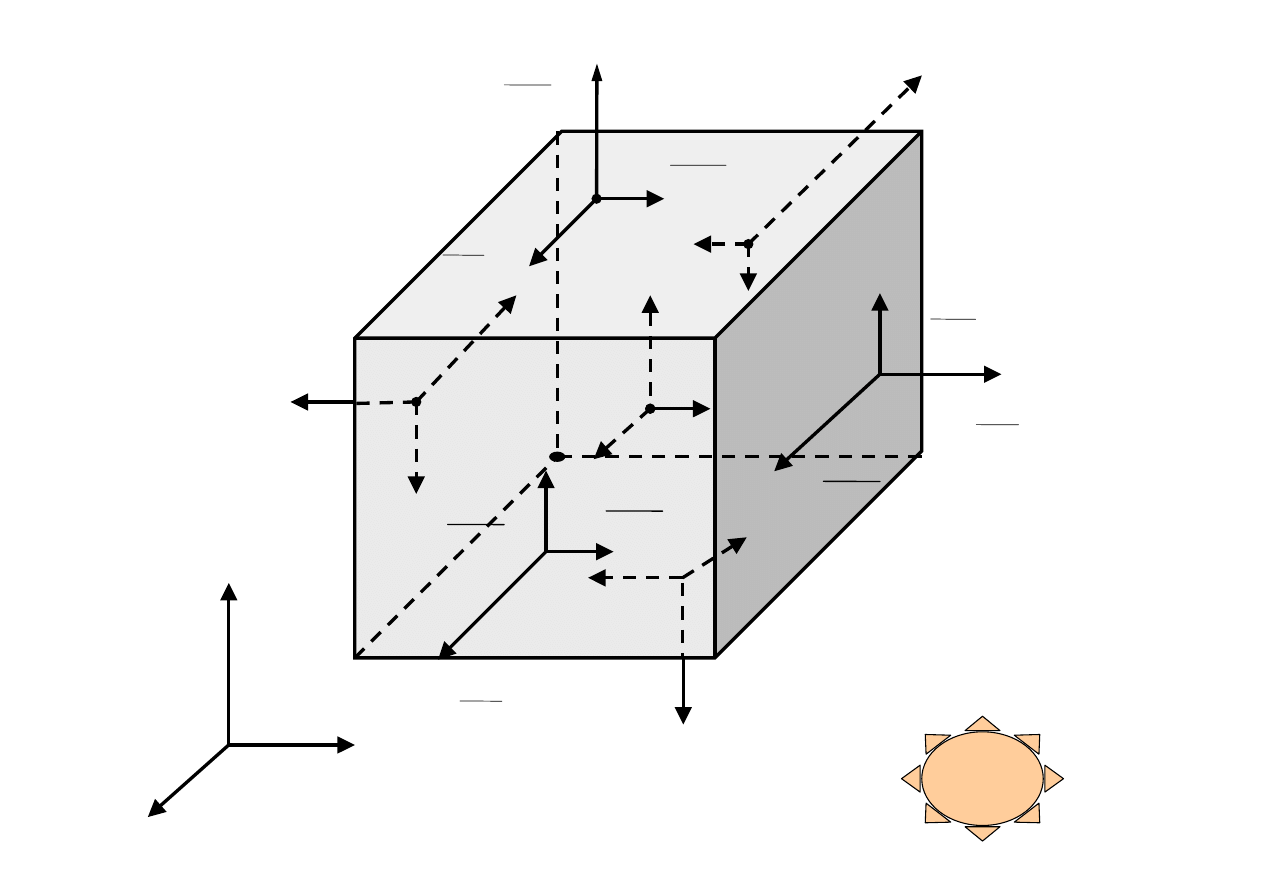
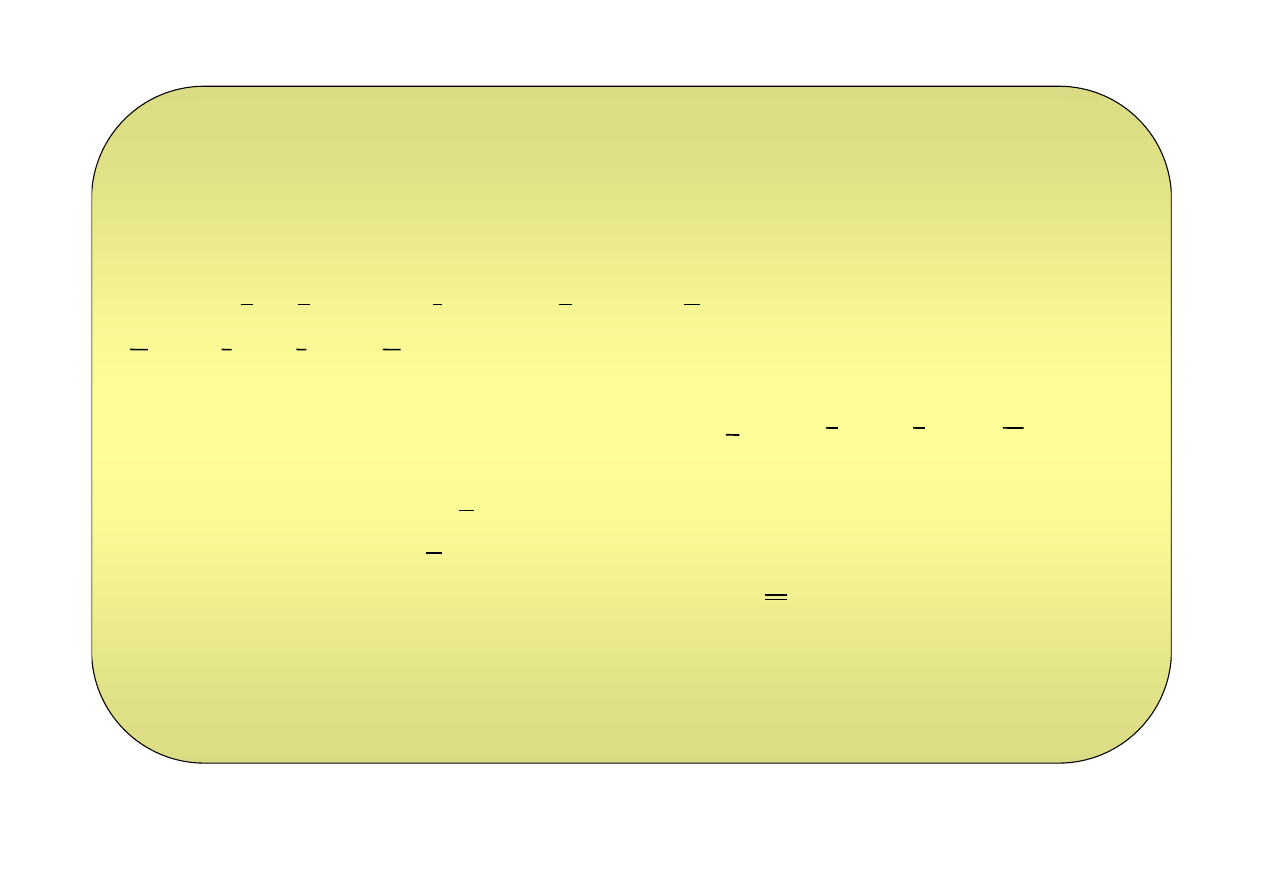
Niechaj obszar wewnętrzny w otoczeniu punktu B będzie
elementarnym prostopadłościanem w prostokątnym układzie osi
współrzędnych , xyz o wersorach i j k (rys.2).
Rys.2
Rys.2
z
z
y
y
x
x
B
B
dy
dy
dz
dz
dx
dx
Na ścianach widocznych działają
wektory naprężenia całkowitego
wektory naprężenia całkowitego
p
x
,
p
y
, p
z
przyporządkowane
dodatnim zwrotom
osi xyz
p
x
p
y
p
z
na ścianach
niewidocznych
przyporządkowane ujemnym zwrotom osi xyz.
p
p
-
-
z
z
p
p
-
-
y
y
i
j
k
,
,
x
x
y
y
z
z
p
p p
p p
p
−
−
−
= −
= −
= −
x
p
−
dA
dA
dA
dA
x
x
dA
dA
y
y
dA
dA
z
z
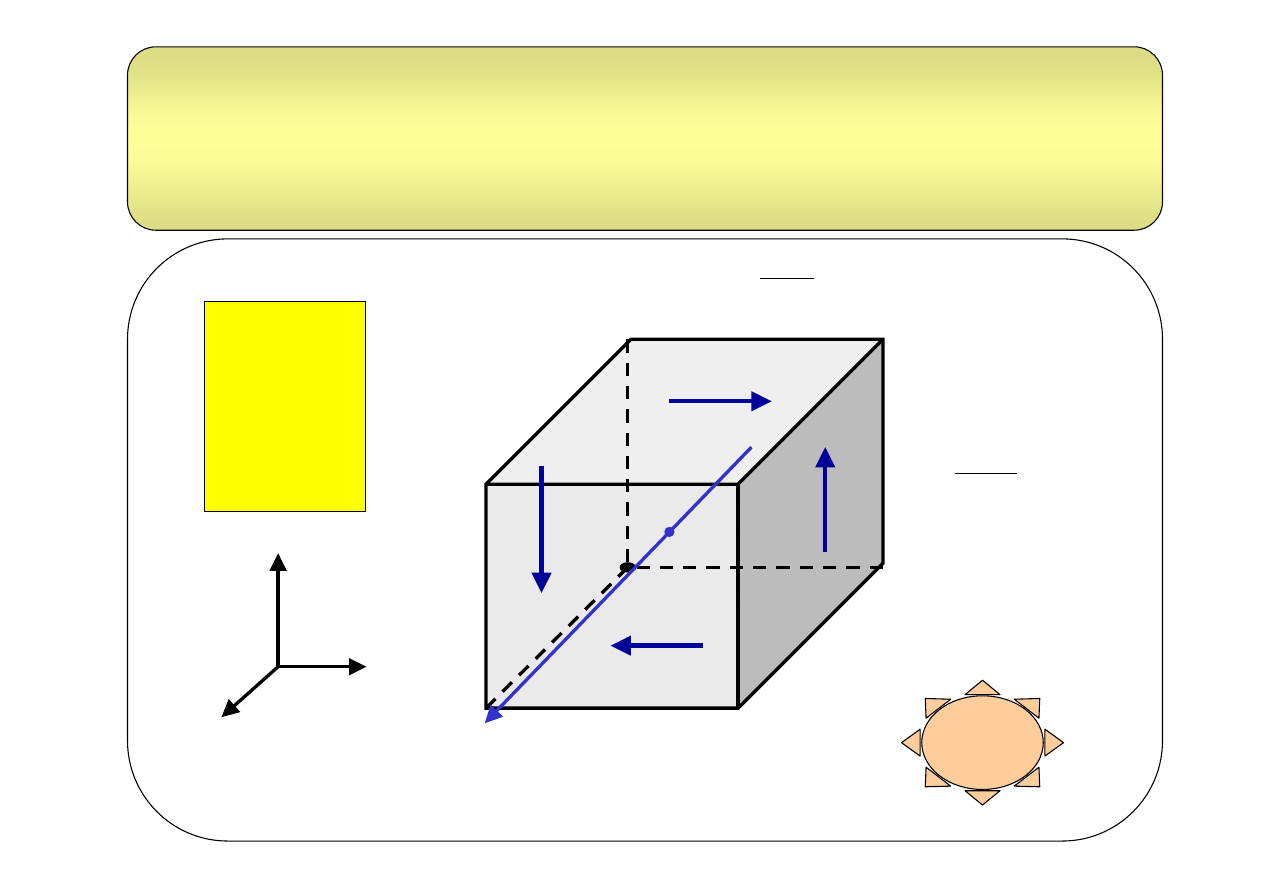
Na płaszczyźnie działa
wektor naprężenia
wektor naprężenia
całkowitego
całkowitego p
μ
przyporządkowany kierunkowi
μ
p
μ
μ
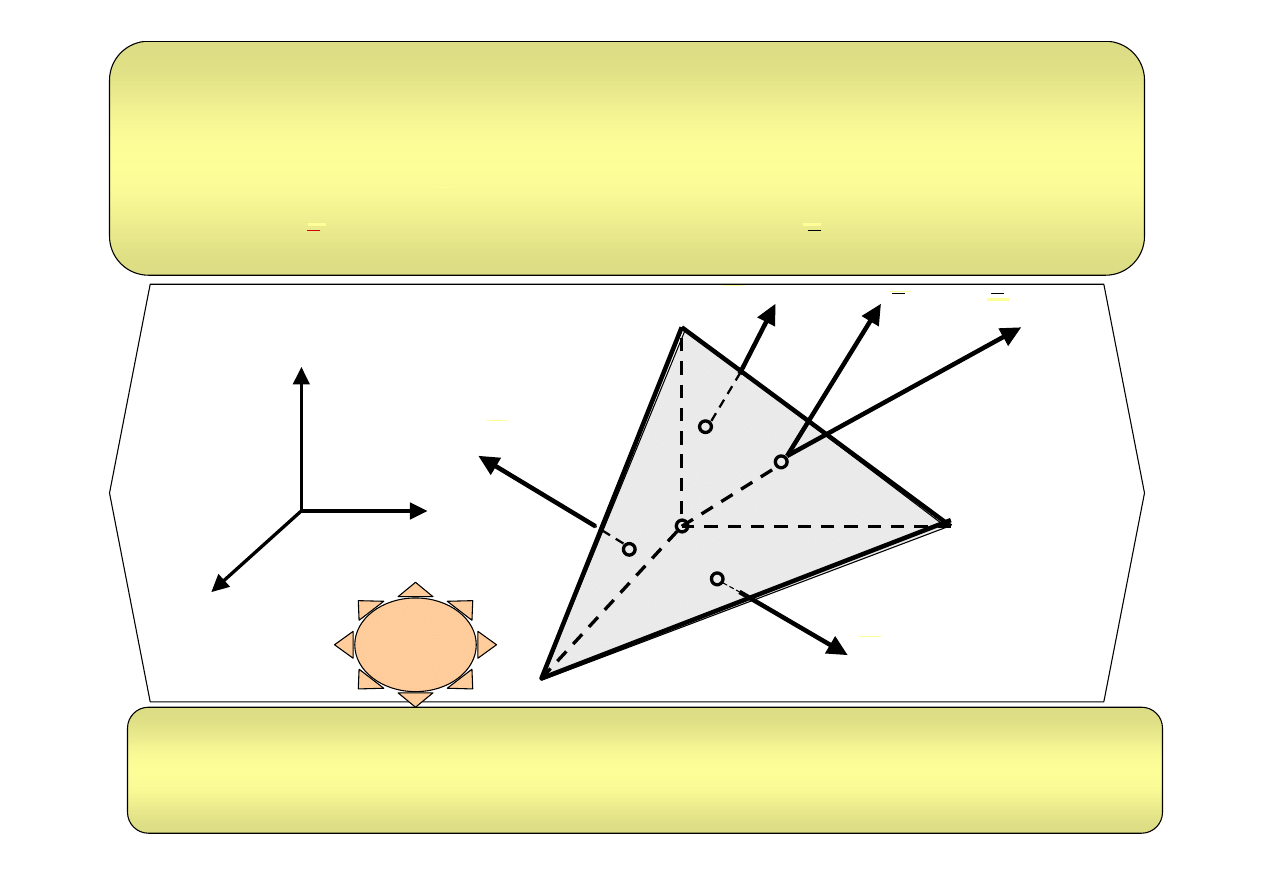
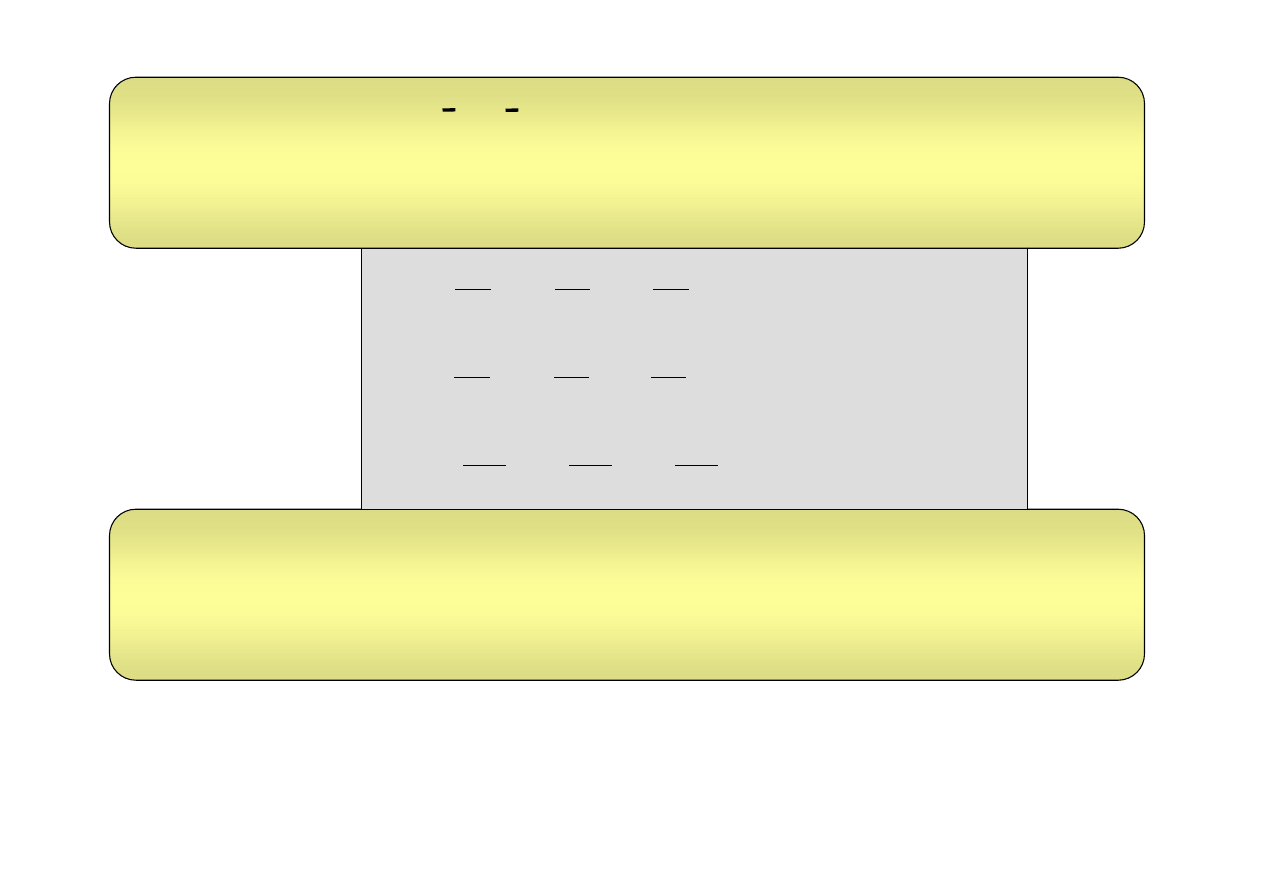
Czworościan utrzymywany jest w równowadze przez
siły
siły
powierzchniowe określone naprężeniami p
powierzchniowe określone naprężeniami p
-
-
x
x
, p
, p
-
-
y
y
, p
, p
-
-
z
z
i p
i p
μ
μ
.
.
p
-z
p
-y
p
-x
Przeprowadzimy w nieskończenie małej odległości h od punktu B
dowolnie zorientowaną płaszczyznę. Powstanie elementarny
czworościan (rys.3) Orientacja płaszczyzny określona jest zewnętrzną
normalną o wersorze
μ.
B
z
y
x
Rys.3
h
gdzie d A, dA
x
, dA
y
, dA
z
pola powierzchni ścian
pola powierzchni ścian
, dla których
normalne zewnętrzne stanowią odpowiednio
μ i ujemne zwroty osi
xyz. Związek powyższy można przedstawić w postaci:
Ponieważ wymiary czworościanu są nieskończenie małe, można
przyjąć, iż działa na niego zbieżny przestrzenny układ sił, a więc
warunek równowagi
warunek równowagi
będzie miał następującą postać:
x
x
y
y
z
z
p dA p dA
p dA
p dA
0
μ
−
−
−
=
-x
x
-y
y
-z
z
p dA+p dA +p dA +p dA
0
μ
=
x
x
y
z
dA
dA
, dA
dA
, dA
dA
y
z
μ
μ
μ
α
α
α
=
=
=
cos ( , ),
cos ( , ),
cos ( , )
x
y
z
x
y
z
μ
μ
μ
α
μ α
μ α
μ
=
=
=
(3)
(3)
(4)
(4)
(5)
(5)
(6)
(6)
Wstawiając (5) do (4) otrzymujemy wzór Cauchy’ego:
p
μ
x
y
z
p
p
p
p
x
y
z
μ
μ
μ
μ
α
α
α
=
+
+
(7)
(7)
Wektor naprężenia
Wektor naprężenia
można także przedstawić w postaci:
można także przedstawić w postaci:
x
y
z
p
p
p
p
i
j
k
μ
μ
μ
μ
=
+
+
x
y
z
p
p
p
x
xy
xz
yx
y
yz
zx
zy
z
i
j
k
i
j
k
i
j
k
σ
τ
τ
τ
σ
τ
τ
τ
σ
=
+
+
=
+
+
=
+
+
a wektory naprężeń
a wektory naprężeń
,
,
,
,
,
,
x
xy
xz
yx
y
yz
zx
zy
z
σ τ τ
τ σ τ
τ τ σ
gdzie składowe stanu naprężenia:
gdzie składowe stanu naprężenia:
(8)
(8)
(9)
(9)
x
y
z
p , p i p :
[ ]
T
x
xy
xz
yx
y
yz
zx
zy
z
σ
σ τ τ
τ σ τ
τ τ σ
⎡
⎤
⎢
⎥
= ⎢
⎥
⎢
⎥
⎣
⎦
(10)
(10)
Wstawiając (8) i (9) do wzoru Cauchy’ego (7) i
porównując czynniki występujące przy jednakowych
wersorach i, j, k otrzymuje się
lub w postaci macierzowej:
x
p
p
p
x
x
yx
y
zx
z
y
xy
x
y
y
zy
z
z
xz
x
yz
y
z
z
μ
μ
μ
μ
μ
μ
μ
μ
μ
μ
μ
μ
σ α
τ α
τ α
τ α
σ α
τ α
τ α
τ α
σ α
=
+
+
=
+
+
=
+
+
x
p
p
p
x
yx
zx
x
y
xy
y
zy
y
z
xz
yz
z
z
μ
μ
μ
μ
μ
μ
σ τ τ
α
τ σ τ
α
τ τ σ
α
⎧
⎫ ⎡
⎤ ⎧
⎫
⎪
⎪ ⎢
⎥ ⎪
⎪
=
⎨
⎬
⎨
⎬
⎢
⎥
⎪
⎪
⎪
⎪
⎢
⎥
⎩
⎭ ⎣
⎦ ⎩
⎭
(11)
(11)
(12)
(12)
lub
tensor stanu naprężenia
x
p
p
p
x
yx
zx
x
y
xy
y
zy
y
z
xz
yz
z
z
μ
μ
μ
μ
μ
μ
σ τ τ
α
τ σ τ
α
τ τ σ
α
⎧
⎫ ⎡
⎤ ⎧
⎫
⎪
⎪ ⎢
⎥ ⎪
⎪
=
⎨
⎬
⎨
⎬
⎢
⎥
⎪
⎪
⎪
⎪
⎢
⎥
⎩
⎭ ⎣
⎦ ⎩
⎭
x
p
p
p
,
p
y
z
μ
μ
μ
μ
⎧
⎫
⎪
⎪
= ⎨
⎬
⎪
⎪
⎩
⎭
x
o
y
z
μ
μ
μ
α
μ
α
α
⎧
⎫
⎪
⎪
= ⎨
⎬
⎪
⎪
⎩
⎭
'
p
T
o
μ
σ
μ
⎡ ⎤
= ⎣ ⎦
[ ]
'
T
T
x
yx
zx
T
xy
y
zy
xz
yz
z
σ
σ
σ τ τ
τ σ τ
τ τ σ
⎡
⎤
⎢
⎥
⎡ ⎤ =
=
⎢
⎥
⎣ ⎦
⎢
⎥
⎣
⎦
gdzie
gdzie
yx
xy
zx
xz
yz
yz
τ
τ
τ
τ
τ
τ
=
=
=
(13)
(13)
(14)
(14)
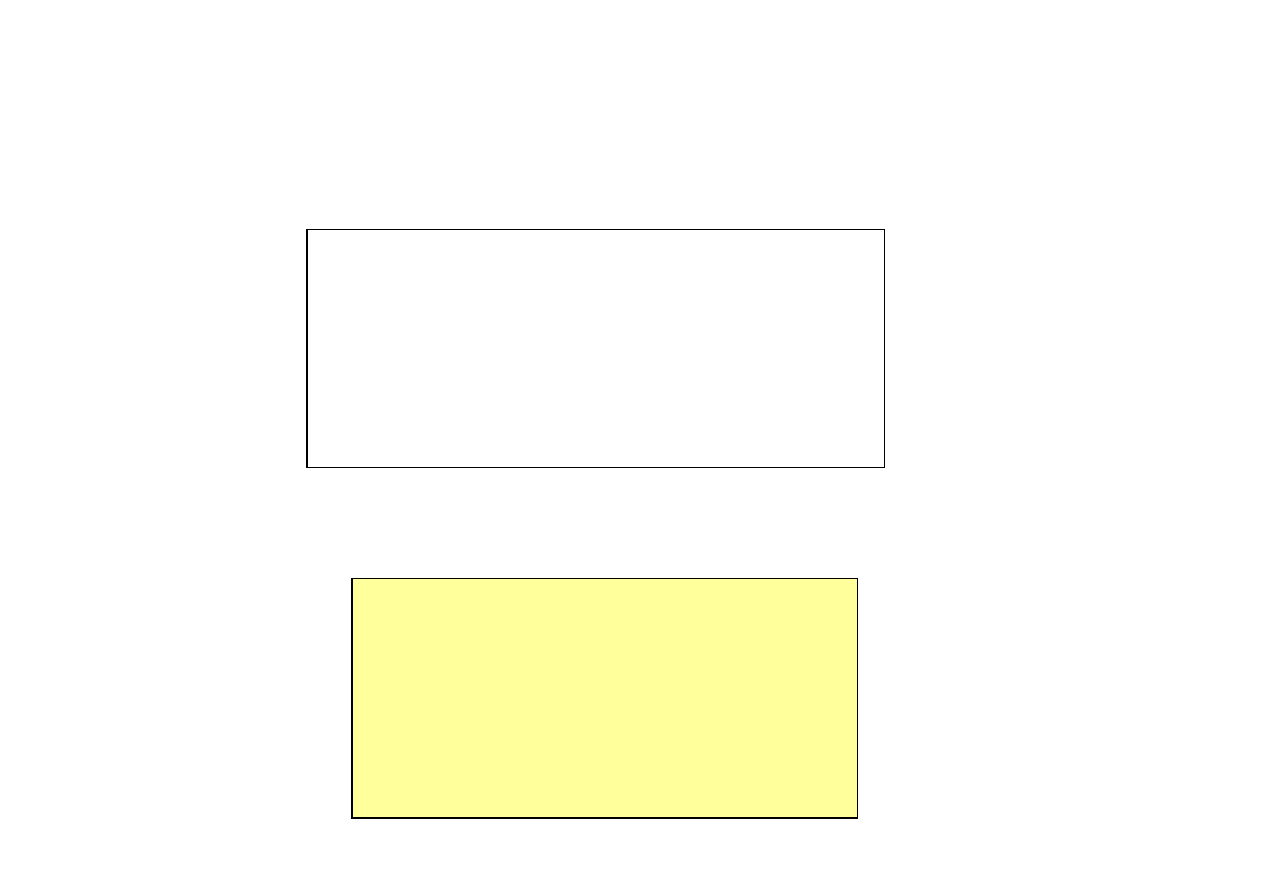
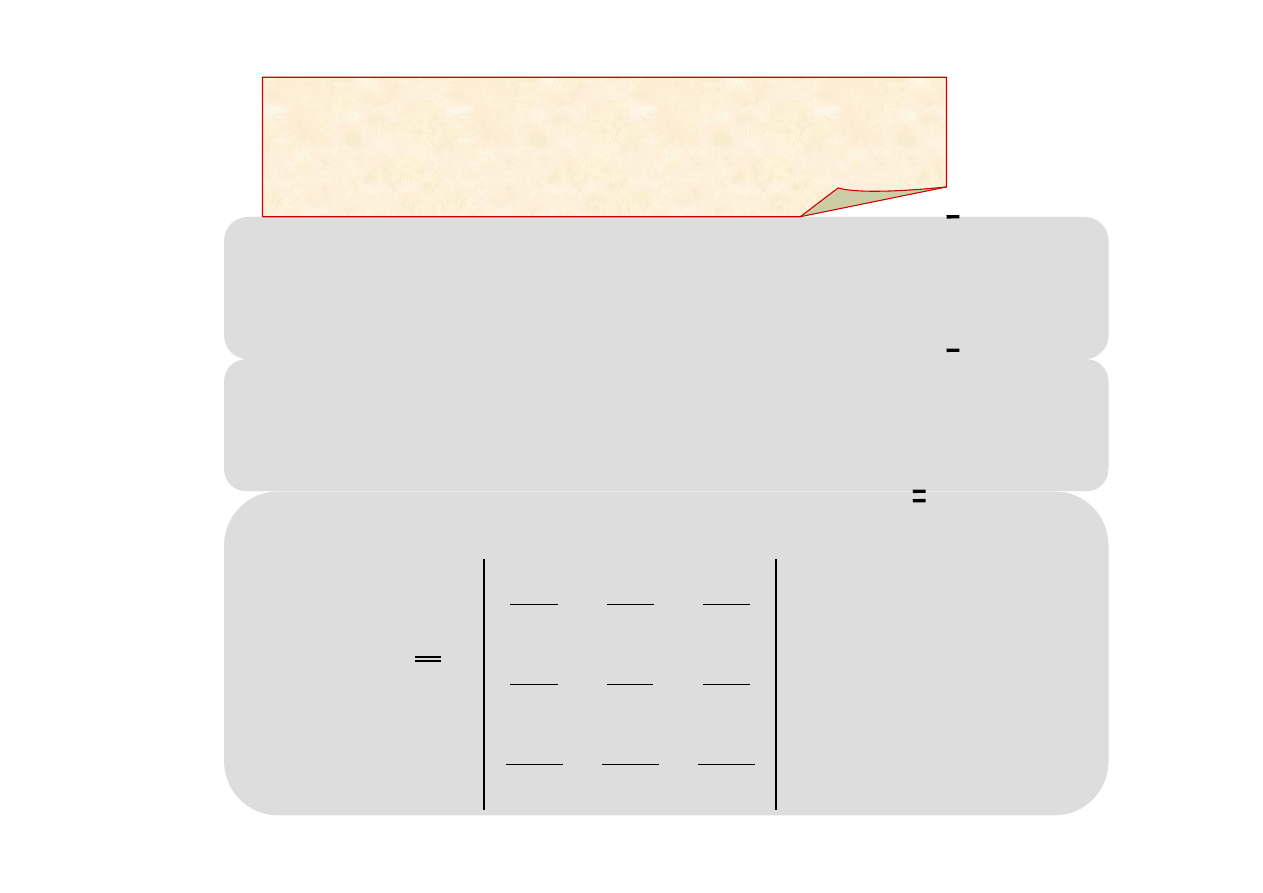
B
B
dz
dx
dy
σ
σ
x
x
τ
τ
xz
xz
τ
τ
xy
xy
σ
σ
x
x
τ
τ
xz
xz
τ
τ
xy
xy
σ
σ
y
y
τ
τ
yz
yz
τ
τ
yx
yx
σ
σ
y
y
τ
τ
yz
yz
τ
τ
yx
yx
σ
σ
z
z
τ
τ
zx
zx
τ
τ
zy
zy
σ
σ
z
z
τ
τ
zx
zx
τ
τ
zy
zy
gdzie
gdzie
:
:
σ
x
,
σ
y
,
σ
z
składowe normalne stanu naprężania
składowe normalne stanu naprężania
działające w
płaszczyźnie, do której normalną jest odpowiednio oś x, y, z,
τ
xy
,
τ
yx
,
τ
yz
,
τ
zy
,
τ
zx
,
τ
xz
-
składowe styczne stanu naprężenia
składowe styczne stanu naprężenia
0
0
x
x
y
y
z
z
Rys.4
Jeżeli każdemu punktowi ciała przypisany zostanie tensor stanu
Jeżeli każdemu punktowi ciała przypisany zostanie tensor stanu
naprężenia, to określone będzie
naprężenia, to określone będzie
tensorowe pole stanu naprężenia
tensorowe pole stanu naprężenia
w tym ciele. Pole tensorowe określa
w tym ciele. Pole tensorowe określa
sześć
sześć
składowy stanu
składowy stanu
naprężenia
naprężenia
, które są funkcjami współrzędnych punktu ciała x, y,
, które są funkcjami współrzędnych punktu ciała x, y,
z
z
σ
σ
x
x
(x,y,z)
(x,y,z)
σ
σ
y
y
(x,y,z),
(x,y,z),
σ
σ
z
z
(x,y,z),
(x,y,z),
τ
τ
xy
xy
(x,y,z),
(x,y,z),
τ
τ
yz
yz
(x,y,z),
(x,y,z),
τ
τ
zx
zx
(x,y,z).
(x,y,z).
Stan naprężenia w ciele może być
Stan naprężenia w ciele może być
niejednorodny
niejednorodny
lub
lub
jednorodny
jednorodny
.
.
W pierwszym ogólnym przypadku tensory stanu naprężenia w
W pierwszym ogólnym przypadku tensory stanu naprężenia w
poszczególnych punktach ciała są różne, a w drugim szczególnym
poszczególnych punktach ciała są różne, a w drugim szczególnym
przypadku są jednakowe.
przypadku są jednakowe.
Aby zdefiniować
Aby zdefiniować
tensor stanu naprężenia w punkcie ciała
tensor stanu naprężenia w punkcie ciała
,
,
rozważano równowagę elementarnego prostopadłościanu w
rozważano równowagę elementarnego prostopadłościanu w
przypadku jednorodnego stanu naprężenia. Dlatego składowe
przypadku jednorodnego stanu naprężenia. Dlatego składowe
stanu naprężenia działające na równoległych ścianach były
stanu naprężenia działające na równoległych ścianach były
jednakowe (rys.4).
jednakowe (rys.4).
W przypadku
niejednorodnego stanu naprężenia
niejednorodnego stanu naprężenia
jego składowe są
funkcjami współrzędnych x, y, z punktu ciała. Rozważając
równowagę elementarnego prostopadłościanu należy zatem
uwzględnić przyrosty tych funkcji, wynikające z przyrostu
współrzędnych.
Ściany bowiem niewidoczne wyznaczają punkt B o współrzędnych
x, y, z, a widoczne punkty C o współrzędnych x + dx, y + dy, z +
dz.
Na elementarny prostopadłościan działają
siły
siły
powierzchniowe
powierzchniowe
, reprezentowane na poszczególnych ścianach
przez
składowe stanu
składowe stanu
naprężenia
naprężenia
oraz
siły masowe
siły masowe
, których
składowe w kierunku osi xyz oznaczamy odpowiednio X, Y, Z w
N/kg. Siły te muszą spełniać sześć warunków równowagi.
0
0
x
x
y
y
z
z
B
dz
dz
dx
dx
dy
dy
C
x
x
y
y
z
z
τ
τ
xz
xz
σ
σ
z
z
dz
dz
z
z
z
z
z
z
∂
∂
σ
σ
∂
∂
+
+
∂
∂
τ
τ
yz
yz
dy
dy
y
y
yz
yz
yz
yz
∂
∂
τ
τ
∂
∂
+
+
τ
τ
dx
dx
x
x
xz
xz
xz
xz
∂
∂
τ
τ
∂
∂
+
+
τ
τ
τ
τ
zy
zy
τ
τ
xy
xy
dz
dz
z
z
zy
zy
zy
zy
∂
∂
τ
τ
∂
∂
+
+
τ
τ
σ
σ
y
y
dy
dy
y
y
y
y
y
y
∂
∂
σ
σ
∂
∂
+
+
σ
σ
dx
dx
x
x
xy
xy
xy
xy
∂
∂
τ
τ
∂
∂
+
+
τ
τ
σ
σ
x
x
τ
τ
zx
zx
dz
dz
z
z
zx
zx
zx
zx
∂
∂
τ
τ
∂
∂
+
+
τ
τ
τ
τ
yx
yx
dy
dy
y
y
yx
yx
yx
yx
∂
∂
τ
τ
∂
∂
+
+
τ
τ
dx
x
x
x
∂
σ
∂
+
σ
Rys.5
Lokalne równania różniczkowe równowagi wewnętrznej ciała
gdzie:
X
ρ, Yρ, Zρ są to siły objętościowe w
3
m
N
0
Z
z
y
x
0
Y
z
y
x
0
X
z
y
x
z
yz
xz
zy
y
xy
zx
xy
x
=
ρ
+
∂
σ
∂
+
∂
τ
∂
+
∂
τ
∂
=
ρ
+
∂
τ
∂
+
∂
σ
∂
+
∂
τ
∂
=
ρ
+
∂
τ
∂
+
∂
τ
∂
+
∂
σ
∂
(15)
0
0
x
x
y
y
z
z
dz
dz
dx
dx
dy
dy
X’
X’
τ
τ
yz
yz
τ
τ
zy
zy
dz
z
z
zy
∂
∂
+
σ
τ
dy
y
yz
yz
∂
∂
+
τ
τ
Rys.6
Obliczamy
sumę momentów sił
sumę momentów sił
działających na elementarny
prostopadłościan względem osi x’ przechodzącej przez jego środek
ciężkości ( dzięki czemu można pominąć momenty sił masowych ) i
równoległej do osi x, a następnie przyrównujemy ją do zera.
xz
zx
yx
xy
zy
yz
τ
τ
τ
τ
τ
τ
=
=
=
Znajomość pola tensorowego stanu naprężenia stanowi
podstawę oceny wytrzymałości ciała. Dlatego jednym z
głównych zadań wytrzymałości materiałów jest analiza
analiza
stanu naprężenia.
stanu naprężenia.
Inne oznaczenia:
1
2
3
11
22
33
12
23
31
,
,
,
,
,
,
x
y
z
xy
yz
zx
x
x
y
x
z
x
σ
σ σ
σ σ
σ
τ
σ τ
σ τ
σ
→
→
→
=
=
=
=
=
=
Tensor stanu naprężęnia
[ ]
T
x
xy
xz
yx
y
yz
zx
zy
z
σ
σ τ τ
τ σ τ
τ τ σ
⎡
⎤
⎢
⎥
= ⎢
⎥
⎢
⎥
⎣
⎦
[ ]
11
12
13
21
22
23
31
32
33
T
ij
σ
σ σ σ
σ σ σ
σ
σ σ σ
⎡
⎤
⎢
⎥ ⎡ ⎤
=
= ⎣ ⎦
⎢
⎥
⎢
⎥
⎣
⎦
→
(16)
(16)
Równania różniczkowe
lokalnej równowagi wewnętrznej
lub
31
11
21
1
1
2
3
32
12
22
2
1
2
3
13
23
33
3
1
2
3
0
0
0
X
x
x
x
X
x
x
x
X
x
x
x
σ
σ
σ
ρ
σ
σ
σ
ρ
σ
σ
σ
ρ
∂
∂
∂
+
+
+
=
∂
∂
∂
∂
∂
∂
+
+
+
=
∂
∂
∂
∂
∂
∂
+
+
+
=
∂
∂
∂
3
1
0,
1, 2,3
ji
i
j
j
X
i
x
σ
ρ
=
∂
+
=
=
∂
∑
0, ( ,
1, 2,3)
ji
i
j
X
i j
x
σ
ρ
∂
+
=
=
∂
(17)
(17)
(18)
(18)
,
,
0, ( ,
1,2,3)
ji j
i
ji
ji j
j
X
i j
x
σ
ρ
σ
σ
+
=
=
∂
=
∂
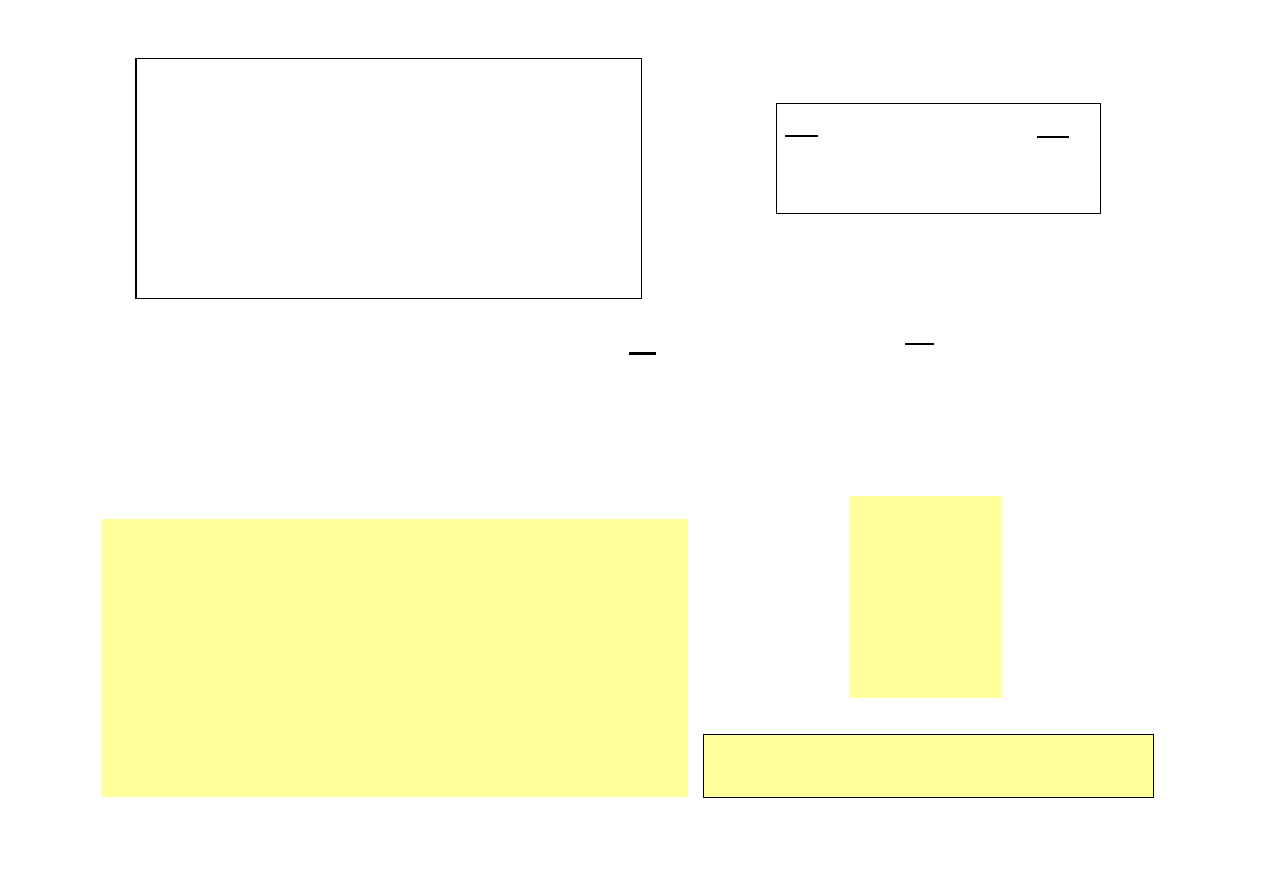
Jeśli do unieruchomionego przez więzy
ciała odkształcalnego
ciała odkształcalnego
przyłożyć
obciążenia zewnętrzne
obciążenia zewnętrzne
, to dowolny jego punkt B, którego
położenie wyznacza
wektor promień
wektor promień
przemieści się
przemieści się
i zajmie pozycję B’.
Odcinek skierowany BB’ nazywa się
wektorem przemieszczenia
wektorem przemieszczenia
punktu B.
Pole wektorowe
Pole wektorowe
zostanie
określone
określone
, jeśli każdemu punktowi ciała
przypisany będzie
wektor przemieszczenia
wektor przemieszczenia
Składowe wektora przemieszczeń
Składowe wektora przemieszczeń
są w takim przypadku
funkcjami
funkcjami
współrzędnych x,y,z
współrzędnych x,y,z
punktu B ciała w stanie nie odkształconym
u(x,y,z) v(,x,y,z) w(x,y,z).
r
xi
yj zk
=
+
+
b
ui
vj wk
=
+ +
b
z
y
x
B
r
C
dr
w+dw
v+dv
u+du
v
w
u
B’
b
C’’
b+db
C’
dr+db
dr
Rys.7
db
b ui
vj wk
db dui
dvj
dwk
=
+
+
=
+
+
r
xi
yj
zk
dr
dxi
dyj
dzk
=
+
+
=
+
+
;
;
;
;
u ui v vj w wk
du dui dv
dvj dw dwk
=
=
=
=
=
=
i
wersor x
j
wersor y
k
wersor z
→
→
→
Odcinek BC jest jak widać, wektorem
k
dz
j
dy
i
dx
r
d
+
+
=
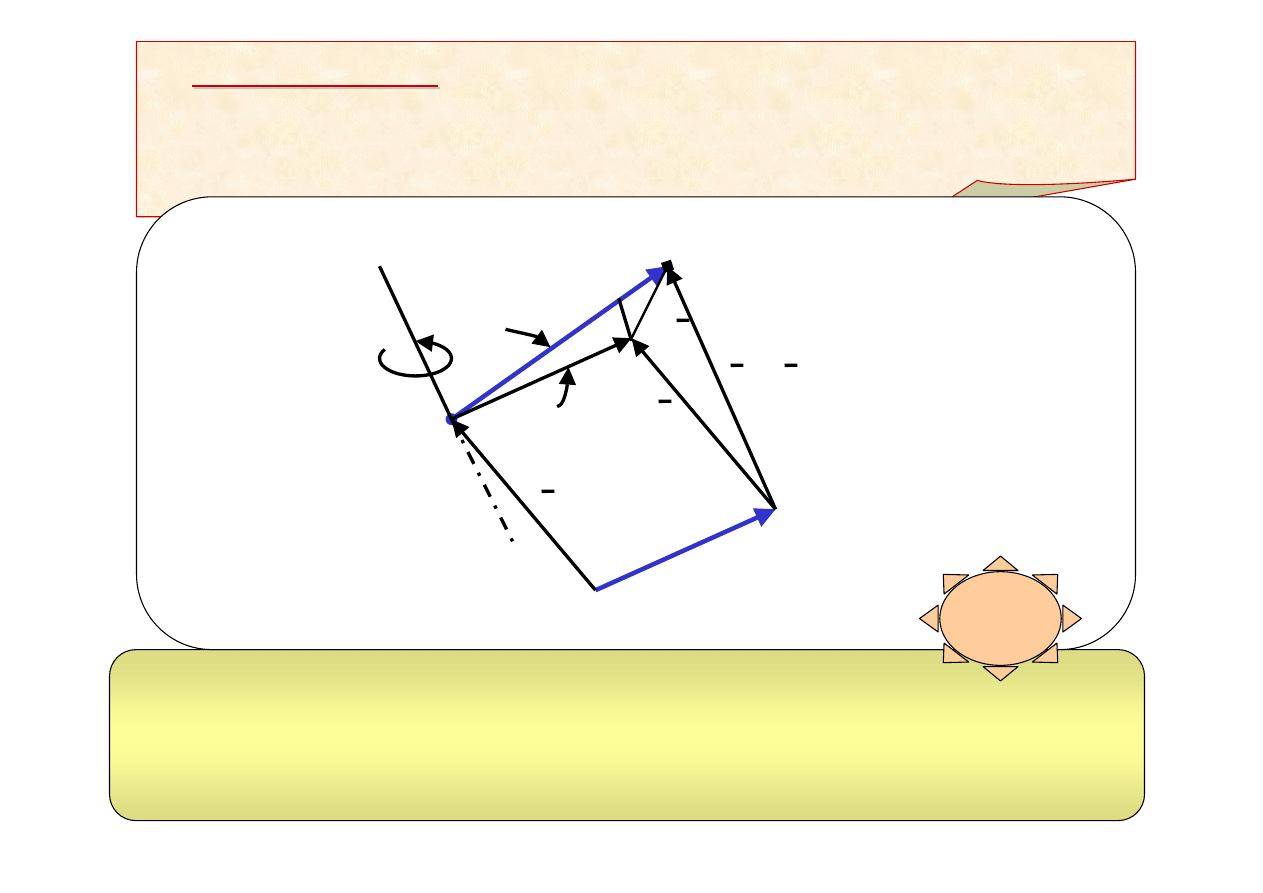
Rozważmy infinitezymalny (nieskończenie mały) odcinek BC
ciała
ciała
odkształcalnego
odkształcalnego
, który po jego odkształceniu stanie się odcinkiem
B’C’’. Zakładamy bowiem, że ze względu na nieskończenie małe
wymiary pozostanie on nadal prosty.
Położenie punktu
Położenie punktu
C określa
wektor
wektor
a jego
przemieszczenie
przemieszczenie
.
k
dw
j
dv
i
du
b
d
+
+
=
(
) (
) (
)
k
dz
z
j
dy
y
i
dx
x
r
d
r
+
+
+
+
+
=
+
Każdemu wektorowi w punkcie B ciała przyporządkować można
odpowiedni wektor . Takie przyporządkowanie jest, jak wiadomo,
tensorem drugiego rzędu, który oznaczymy .
r
d
b
d
α
Założyliśmy przy tym, że funkcje u(x, y, z) v(x, y, z) w(x, y, z) są
ciągłe
ciągłe
i
zróżniczkowane
zróżniczkowane
.
Składowe wektorów db i dr związane są ze sobą następującymi
zależnościami:
dz
z
w
dy
y
w
dx
x
w
dw
dz
z
v
dy
y
v
dx
x
v
dv
dz
z
u
dy
y
u
dx
x
u
du
∂
∂
+
∂
∂
+
∂
∂
=
∂
∂
+
∂
∂
+
∂
∂
=
∂
∂
+
∂
∂
+
∂
∂
=
(19)
Wprowadzimy następujące macierze:
Jednokolumnową macierz składowych wektora db
[ ] [
]
T
dw
dv
du
db
=
(20)
Jednokolumnową macierz składowych wektora dr
[ ] [
]
T
dz
dy
dx
dr
=
(21)
Kwadratową macierz - reprezentację tensora
α
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
=
z
w
y
w
x
w
z
v
y
v
x
v
z
u
y
u
x
u
α
(22)
Zależności (19) po uwzględnieniu (20),(21) i (22) można zapisać
w formie macierzowej następująco:
[ ]
[ ]
dr
db
α
=
Niesymetryczny tensor
Niesymetryczny tensor
przedstawić można jako
przedstawić można jako
sumę tenora
sumę tenora
antysymetrycznego
antysymetrycznego
i
i
symetrycznego
symetrycznego
Słuszność tej formuły można sprawdzić dodając kolejno
odpowiednie elementy macierzy. W formule (24) występują
następujące macierze:
(23)
ε
ω
α
+
=
(24)
ε
ω
α
Kwadratowa macierz reprezentacja
tensora
tensora
antysymetrycznego
antysymetrycznego
Kwadratowa macierz reprezentacja
tensora symetrycznego
tensora symetrycznego
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
∂
∂
−
∂
∂
∂
∂
−
∂
∂
∂
∂
−
∂
∂
∂
∂
−
∂
∂
∂
∂
−
∂
∂
∂
∂
−
∂
∂
=
0
)
z
v
y
w
(
2
1
)
z
u
x
w
(
2
1
)
y
w
z
v
(
2
1
0
)
y
u
x
v
(
2
1
)
x
w
z
u
(
2
1
)
x
v
y
u
(
2
1
0
ω
(25)
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
∂
∂
∂
∂
+
∂
∂
∂
∂
+
∂
∂
∂
∂
+
∂
∂
∂
∂
∂
∂
+
∂
∂
∂
∂
+
∂
∂
∂
∂
+
∂
∂
∂
∂
=
z
w
)
z
v
y
w
(
2
1
)
z
u
x
w
(
2
1
)
y
w
z
v
(
2
1
y
v
)
y
u
x
v
(
2
1
)
x
w
z
u
(
2
1
)
x
v
y
u
(
2
1
x
u
ω
(26)
ε
Wprowadźmy oznaczenia
Odkształcenia
względne
,
,
x
y
z
u
v
w
x
y
z
ε
ε
ε
∂
∂
∂
=
=
=
∂
∂
∂
yx
xy
zx
xz
zy
yz
u
v
y
x
u
w
z
x
v
w
z
y
γ
γ
γ
γ
γ
γ
∂
∂
=
=
+
∂
∂
∂
∂
=
=
+
∂
∂
∂
∂
=
=
+
∂
∂
Kąty odkształceń
Kąty odkształceń
postaciowych
postaciowych
Tensor stanu odkształcenia
1
1
2
2
1
1
2
2
1
1
2
2
x
yx
zx
xy
y
zy
xz
yx
z
ε
γ
γ
ε
γ
ε
γ
γ
γ
ε
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
= ⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
x
z
y
dz
dx
dy
C’’’
dz(1+
εz)
dx(1+
εx)
dy(1+
εy)
Prostopadłościan przed
odkształceniem
B
C
Odcinek BC potraktować można jako przekątną elementarnego
prostopadłościanu, który
stanowi otoczenie
punktu B (rys.8)
r
yz
2
γ
π
−
xy
2
γ
π
−
zx
2
γ
π
−
Rys.8
C’
B’
Prostopadłościan po
odkształceniu
Prostopadłościan
Prostopadłościan
przemieszcza się
przemieszcza się
(BC przechodzi w położenie
B’C’’) jako ciało sztywne oraz
odkształca się
odkształca się
(przekątna B’C’’
wydłuża się lub skraca o C’’C’’’).
oś obrotu
kąt obrotu
C’’
C’’’
b+db
db
Istotne znaczenie ma tu odkształcenie prostopadłościanu,
związane ze
zmianą długości jego przekątnej
zmianą długości jego przekątnej
o C’’C’’’.
Fazy zmian
przekątnej BC
B’
B
C
C’
b
b
Rys.9
Odkształcenie
Odkształcenie
elementarnego prostopadłościanu polega
na
zmianie
zmianie
długości jego krawędzi
długości jego krawędzi
, co określają
wydłużenia względne
wydłużenia względne
ε
x
,
ε
y
,
ε
z
, oraz zmianie kątów
prostych pomiędzy ścianami, co określają
kąty
kąty
odkształcenia postaciowego
odkształcenia postaciowego
γ
xy
,
γ
yz
,
γ
zx
.
Wprowadźmy nowe oznaczenia:
1
2
3
1
2
3
1
1
2
11
12
1
2
1
3
2
2
22
23
2
3
2
3
3
1
33
31
3
1
3
,
,
,
1
2
,
1
,
2
1
,
2
1
,
1
2
1
2
2
x
xy
y
yz
z
zx
x
x
x
u
u
u
u
u
u
x
x
x
u
u
x
y
z
u
x
x
x
u
u
u
u
x
x
v
w
x
ε
γ
ε
γ
ε
γ
ε
ε
ε
ε
ε
ε
⎛
⎞
∂
∂
∂
+
⎜
⎟
∂
∂
∂
→
→
→
→
⎝
→
→
=
=
=
=
=
=
=
=
=
⎠
⎛
⎞
∂
∂
∂
+
⎜
⎟
∂
=
=
∂
∂
⎝
⎠
⎛
⎞
∂
∂
∂
+
⎜
⎟
∂
∂
∂
⎝
⎠
=
1
,( ,
1,2,3)
2
j
i
ij
j
i
u
u
i j
x
x
ε
⎛
⎞
∂
∂
+
=
⎜
⎟
⎜
⎟
∂
∂
⎝
⎠
=
lub
lub

Tensor stanu odkształcenia
11
12
13
21
22
23
31
32
33
ij
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε
ε
⎡
⎤
⎢
⎥
⎡ ⎤
=
=
⎣ ⎦ ⎢
⎥
⎢
⎥
⎣
⎦
Warunki ciągłości (nierozdzielności)
odkształceń de Saint – Venanta
,
0
ikm
jln
kl mn
e
e
ε
=
(
)
, , , , ,
1, 2,3
i j k l m n
=
Notacja inżynierska:
,
2
2
2
2
2
y
x
x
y
xy
y
x
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
,
2
2
2
2
2
z
y
y
z
yz
z
y
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
x
z
z
x
zx
x
z
∂
∂
γ
∂
=
∂
ε
∂
+
∂
ε
∂
2
2
2
2
2
z
y
x
y
z
x
x
yz
zx
xy
∂
∂
ε
∂
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
γ
∂
−
∂
γ
∂
+
∂
γ
∂
∂
∂
2
2
x
z
y
z
x
y
y
zx
xy
yz
∂
∂
ε
∂
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
γ
∂
−
∂
γ
∂
+
∂
γ
∂
∂
∂
2
2
y
x
z
x
y
z
z
xy
yz
zx
∂
∂
ε
∂
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
∂
γ
∂
−
∂
γ
∂
+
∂
γ
∂
∂
∂
2
2
lub
lub
2
,
kl
kl mn
m
n
x x
ε
ε
∂
=
∂ ∂
0
,
,
1 jesli , , tworzy permutację cykliczną 1,2,3
1
, ,
tworzy permutację cykliczną 1,3,2
ikm
i k k m i m
e
i k m
i k m
=
=
=
⎧
⎪
= ⎨
⎪−
⎩
gdzie
gdzie
Wyszukiwarka
Podobne podstrony:
Przestrzenny stan naprężenia i odkształcenia
9 Stan naprężenia i odkształcenia, wytrzymałość prosta ppt
03 Plaski stan naprezenia i odksztalcenia
X 5 Stan naprężenia i odkształcenia w otoczeniu budowli podziemnych
07 Z Teoria stanu naprężenia i odkształcenia
5 Analiza naprężeń i odkształceń w?lce statycznie niewyznaczalnej
22) TSiP stan naprężenia zadanie
3 Naprężenia i odkształcenia w pręcie
2 Analiza stanu naprezenia i odksztalcenia w punkcie
Analiza stanu naprężenia i odkształcenia
P 2 Analiza naprężeń i odkształceń w punkcie
Pierwotny stan naprężeni201/9167
więcej podobnych podstron