n a p ę d y i s t e r o w a n i e
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
16
S
ilniki skokowe są typowymi ele-
mentami pracującymi w sposób
dyskretny. Zasada pracy tych silników
opiera się na dyskretnych zmianach
pola magnetycznego, co odróżnia je od
innych silników elektrycznych, gdzie
pole magnetyczne zmienia się w spo-
sób ciągły. Chwilowy moment silnika
skokowego zależy od wzajemnego
ustawienia osi podłużnej wirnika sil-
nika i osi magnetycznej pola wzbudze-
nia stojana (rys. 1).
Zakładając rozkład indukcji ma-
gnetycznej wirnika silnika magne-
toelektrycznego według funkcji cosi-
nus, zależność na moment synchro-
nizujący położenie wirnika z polem
stojana, ma postać:
M=-2p×I×z×B
m
×sind (1)
gdzie:
I – prąd płynący w fazie uzwojenia
stojana,
z – liczba zwojów uzwojenia fazy,
B
m
– indukcja maksymalna wirnika
(w osi podłużnej – d).
Przy zasilaniu silnika prądem zna-
mionowym, zależność (1) może być
zapisana jako:
M=-M
m
×sind (2)
gdzie:
M
m
– maksymalna wartość momen-
tu synchronizującego przy zasilaniu
prądem znamionowym.
Ujemny znak momentu synchro-
nizującego oznacza, że moment
synchronizujący zawsze przeciw-
działa momentowi zewnętrznemu,
powodującemu wytrącanie wirni-
ka silnika z położenia pozycyjnego,
w którym jego oś podłużna „d” po-
krywa się z osią pola magnetyczne-
go stojana.
Pojęcie pracy silnika typu „start-
stop” oznacza cykliczne starty silni-
ka, wykonanie zadanej drogi kątowej
(określonej liczby skoków) i zatrzy-
mywanie się na określony czas. Wa-
runkiem poprawnej pracy silnika jest
wykonanie liczby skoków odpowia-
dającej liczbie impulsów sterujących.
Praca „start-stop” wymaga zatem cią-
głego przyśpieszenia, a następnie ha-
mowania mas wirnika i ewentualnie
mas mechanizmu napędzanego. Moż-
liwość pracy synchronicznej (bez gu-
bienia skoków) silnika jest uzależnio-
na nie tylko od momentu bezwładno-
ści układu, ale także od średniej war-
tości momentu napędowego silnika.
Silnik skokowy powinien być stero-
wany w taki sposób, aby przy znamio-
nowej wartości momentu synchroni-
zującego maksymalnego – M
m
, uzy-
skać maksymalną wartość średniego
momentu napędowego.
kąt komutacji i moment
średni silnika
Kątem komutacji albo przełączania
faz silnika nazywamy wartość kąta
pomiędzy osią podłużną wirnika
„d” a wektorem (osią) położenia pola
magnetycznego stojana w momencie
przełączania. Chodzi tu o położenie
pola magnetycznego po przełączeniu
faz, czyli inaczej o „nowe” położenie
pozycyjne wirnika.
W silnikach skokowych moment ko-
mutacji nie zachodzi w sposób mecha-
niczny, tak jak ma to miejsce w silni-
kach prądu stałego. Kąt ten jest narzu-
cony przez układ sterowania – komu-
tator elektroniczny – a więc jest zależny
od czasu i obciążenia. Komutacja w sil-
niku skokowym, tj. wymuszenie nowe-
go skoku, jest w rzeczywistości przesu-
waniem pola magnetycznego stojana.
Przy sterowaniu pełnymi skokami,
wektor pola magnetycznego stojana
przesuwany jest o 90°el. Kąt mecha-
niczny przesunięcia wirnika otrzymu-
je się dzięki podzieleniu kąta 90° przez
liczbę par biegunów wirnika. Przy ste-
rowaniu silnika półskokami przesunię-
cie pola stojana wynosi 45°el.
Chwilowa wartość kąta położenia
zawartego pomiędzy osią podłużną
wirnika „d” a nowym położeniem osi
pola stojana – nazywana jest dynamicz-
nym kątem obciążenia silnika. Anali-
zując pracę silnika skokowego, można
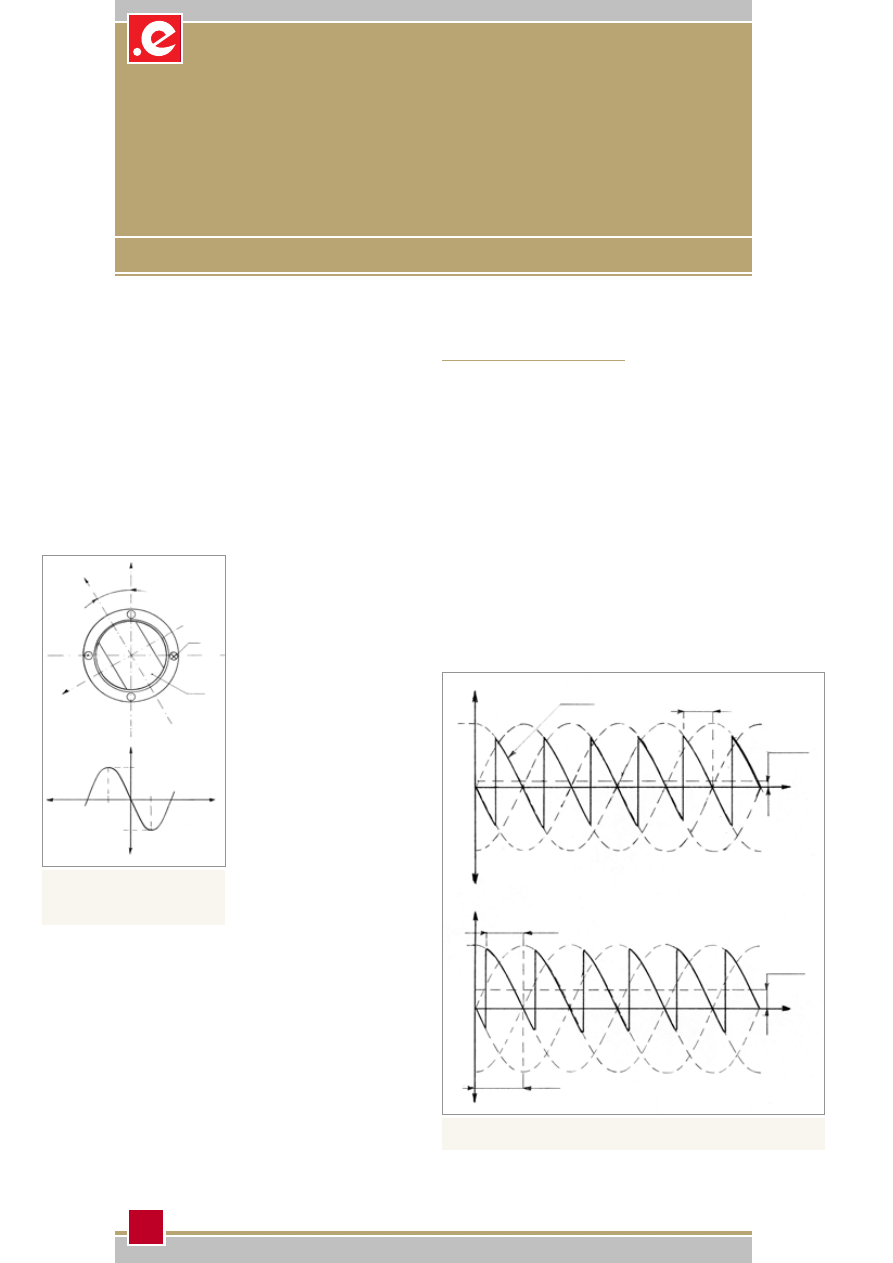
Rys. 1 a) Ilustracja wyjaśniająca zasadę
pracy silnika skokowego b) prze-
bieg momentu synchronizujące-
go silnika
+M
M
m
-M
moment chwilowy
d
k
=52° (kąt komutacji)
M
śr
=M obciążenia
d
d
k
=70°
+M
M
m
-M
90° el (skok pola)
M
śr
=M obciążenia
d
Rys. 2 a) Ilustracja przebiegu momentu silnika skokowego przy stałej prędkości obroto-
wej w przypadku kąta komutacji 52° b) przy kącie komutacji 70°
optymalizacja średniego
momentu silnika skokowego
w zakresie pracy „start-stop“
dr hab. inż. Józef Łastowiecki – Politechnika Warszawska
oś podłużna
wirnika
oś pola stojana
uzwojenie
fazy stojana
wzbudzonej
prądem I
magnes
trwały wirnika
I
S
N
oś poprzeczna
wirnika
q
d
d
+M
+M
m
+90° el
+d
-d
-90° el
-M
m
-M
a)
b)
a)
b)

w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
17
stwierdzić, że średnia wartość momen-
tu rozwijanego przez silnik skokowy za-
leży od średniej wartości dynamiczne-
go kąta obciążenia w okresie pomiędzy
dwiema kolejnymi komutacjami. Kiedy
wirnik zatrzymuje się w położeniu po-
zycyjnym, to kąt komutacji wynosi 90°
i moment silnika rozwijany jest w peł-
ni (sin 90° = 1). Moment wytwarzany
przez silnik podczas biegu wirnika za-
leży już od chwilowej pozycji kątowej
osi podłużnej „d” w momencie komu-
tacji, czyli w rezultacie od „taktowania”
impulsów sterujących i od warunków
obciążenia.
Silnik skokowy, którego wirnik
biegnie ze stałą prędkością, będzie
osiągał kąt komutacji w takim miej-
scu, aby rozwinąć tylko taki moment,
który potrzebny jest do pokrycia strat
oraz momentu obciążenia. Stan taki
ilustruje rysunek 2.
Przebiegi momentu silnika przedsta-
wione na rysunku 2 są słuszne w przy-
padku, gdy fazy silnika są w pełni wzbu-
dzone, czyli płynie znamionowy prąd
w czasie trwania impulsu oraz komuta-
cja prądu zachodzi skokowo. Z rysun-
ku 2 wynika, że w przypadku braku ob-
ciążenia momentem silnika skokowego,
przebieg jego momentu chwilowego bę-
dzie prawie symetryczny co do znaku,
czyli części dodatnie i ujemne przebiegu
momentu będą prawie równe.
maksymalizacja momentu
silnika
W przypadku pracy „start - stop”
i obciążenia silnika znacznym momen-
tem bezwładności, chwilowy przebieg
momentu silnika będzie silnie zależał
od momentu komutacji, co sugeruje, że
„sztywne” taktowanie ze stałym okre-
sem przełączania faz nie jest rozwią-
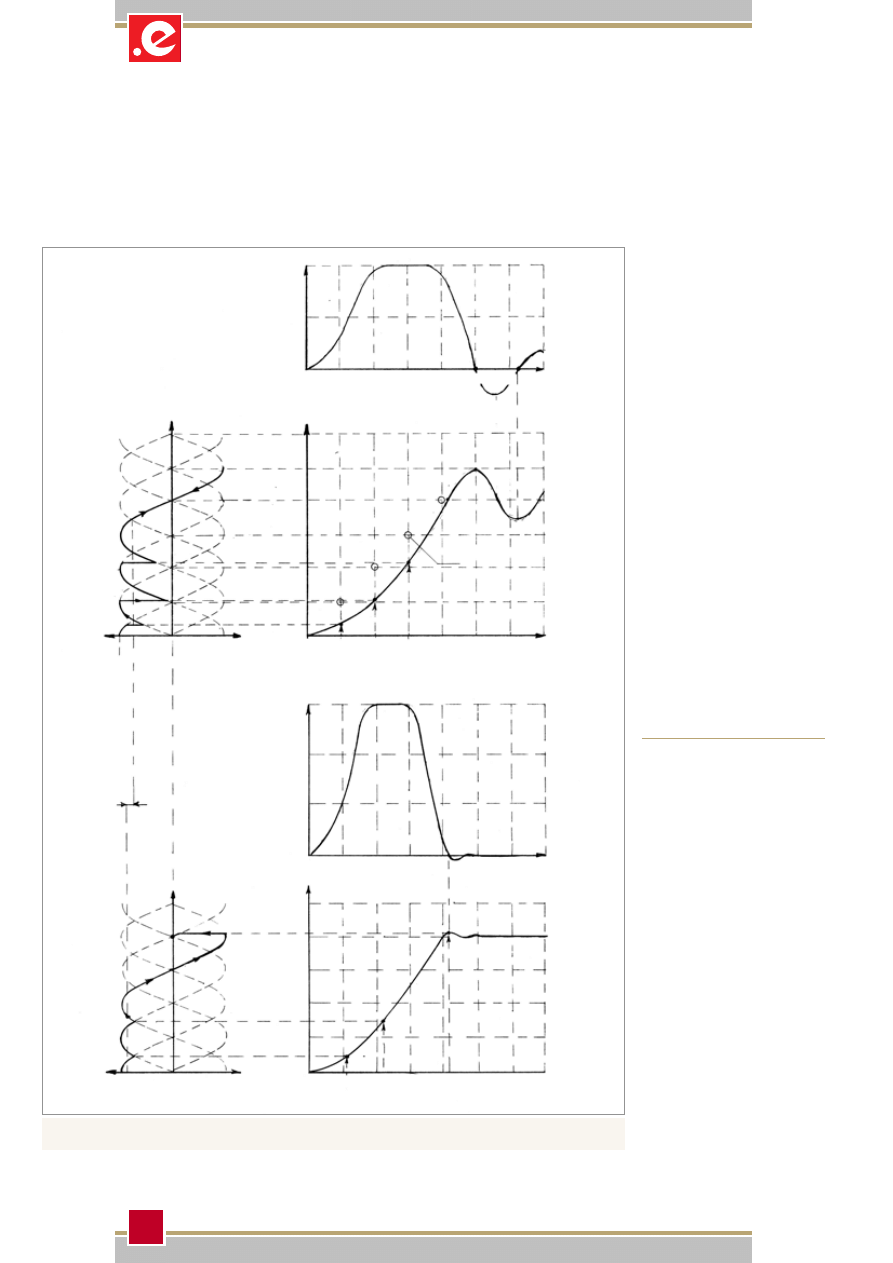
zaniem najlepszym. Na rysunku 3 są
przedstawione przebiegi momentów,
prędkości i drogi wirnika w czasie
czterech zadanych skoków.
Na rysunku 3a widać, że pierw-
szy skok rozpoczyna się przy kącie
komutacji wynoszącym 90°el. i przy
momencie równym momentowi zna-
mionowemu – M
m
. Drugi skok (dru-
gie przełączenie faz) po upływie 10 ms
(częstotliwość impulsowania f = 100
Hz) następuje, gdy silnik wykonał tyl-
ko około 1/3 skoku, co spowodowa-
ło, że kąt komutacji zwiększył się do
około 150°el. Moment synchronizu-
jący w tej chwili przełączania jest
znacznie mniejszy od maksymalne-
go i z upływem czasu, i ruchem wir-
nika rośnie, a po przekroczeniu dy-
namicznego kąta komutacji równego
90°el. spada. Po 20 ms następuje trzeci
skok pola i, jak widać, wirnik dopiero
nieco przekroczył położenie pozycyj-
ne pierwszego kroku. Teraz kąt komu-
tacji jest bliski 180°el., a moment syn-
chronizujący ma wartość bliską zeru.
Prędkość wirnika jest już dość duża,
a moment silnika rośnie. Po upływie
30 ms następuje ostatni, czwarty z ko-
lei skok pola. Wirnik biegnie już z pra-
wie maksymalną prędkością, a kąt ko-
mutacji wynosi około 160
o
. Od chwi-
li, gdy położenie wirnika wykazuje
90
o
el. opóźnienia w stosunku do po-
łożenia pozycyjnego czwartego sko-
ku, moment synchronizujący male-
je. W 42 ms pracy wirnik osiąga za-
dane położenie pozycyjne czwartego
skoku, ale jego prędkość jest bardzo
duża. Wirnik siłą bezwładności prze-
chodzi przez punkt położenia pozy-
cyjnego, co sprawia, że silnik wytwa-
rza ujemny moment, który powodu-
je jego hamowanie. W czasie równym
50 ms prędkość wirnika jest wyhamo-
wana do zera, ale znajduje się on w po-
zycji prawie pół kroku dalej od poło-
żenia pozycyjnego. Występujący w tej
pozycji moment hamujący przyśpie-
sza wstecznie wirnik i zaczyna się
jego oscylacja wokół położenia pozy-
cyjnego. W rozpatrywanym przypad-
ku, jeżeli nie ma dostatecznego tłu-
mienia, oscylacja może trwać nawet
do 100 ms. Jak widać, przy sztywnym
przełączaniu faz zgodnie z zadaną czę-
stotliwością, średni moment wytwa-
rzany przez silnik przy przyspiesza-
niu wirnika nie ma wartości mak-
symalnej. Średnia wartość momen-
tu silnika rośnie natomiast w koń-
cowej fazie pracy, co powoduje nie-
potrzebne magazynowanie energii
kinetycznej w wirniku i powstanie
jego oscylacji.
n a p ę d y i s t e r o w a n i e
w w w. e l e k t r o . i n f o . p l
n r 7 - 8 / 2 0 0 4
18
Modyfikacja sposobu przełączania
faz, przy zachowaniu synchronizmu pra-
cy i zadanej częstotliwości, może zapew-
nić ruch wirnika z większym przyśpie-
szeniem przy jednoczesnym wyelimino-
waniu oscylacji wirnika podczas jego za-
trzymywania. Modyfikacja sterowania
silnika skokowego polega na zastoso-
waniu „nastawiania czasu” każdego sko-
ku, a nie sztywnego przełączania faz po
upływie każdego okresu impulsowania
T, co ilustruje rysunek 3b. Zasilanie faz
w pierwszym kroku jest utrzymywane
aż do chwili, gdy moment silnika spad-
nie do wartości równej temu momento-
wi, który wystąpi po następnej komuta-
cji. Chwila ta ma miejsce w połowie sko-
ku wirnika, co oznacza, że kąt komuta-
cji drugiego skoku wyniesie:
90° + 45° = 135° (3)
Początek drugiego skoku nastąpi
nie po okresie T = 10 ms, ale dłuż-
szym, wynoszącym 11 ms. Odpowied-
nio moment przełączenia faz w trze-
cim skoku wystąpi po czasie 22 ms.
Prowadzona w ten sposób komuta-
cja zapewnia nam maksymalizację
momentu średniego wytwarzanego
przez silnik w czasie przyspieszania.
Wartość momentu waha się od mak-
symalnej – M
m
do 0,7 M
m
. Wirnik sil-
nika jest w stanie wówczas osiągnąć
większą prędkość w danym czasie.
Po trzeciej komutacji zasilanie faz
jest utrzymywane tak długo, aż poja-
wi się moment hamujący, co ma miej-
sce wtedy, gdy wirnik osiągnie poło-
żenie pozycyjne trzeciego skoku. Od
tego momentu prędkość wirnika jest
redukowana przez duży moment ha-
mujący. Kiedy prędkość kątowa wir-
nika osiąga wartość zerową, nastę-
puje komutacja czwartego skoku, co
ma miejsce w rozpatrywanym przy-
kładzie po upływie około 42 ms. Po-
łożenie wirnika po czwartej komuta-
cji jest takie, że powstaje tylko nie-
wielki moment hamujący, sprowa-
dzający wirnik do położenia pozy-
cyjnego w sposób praktycznie bez-
oscylacyjny.
wnioski
Z przedstawionego wyżej opisu
wynika, że korygując czas trwania
impulsów prądowych w każdym sko-
ku wirnika, można uzyskać maksy-
malny moment średni silnika sko-
kowego działającego w zakresie pra-
cy „start - stop”. Zwiększony moment
średni silnika pozwala na jego więk-
sze obciążenie, przy jednoczesnym
zapewnieniu bezoscylacyjnego sto-
powania ruchu, co ma w wielu przy-
padkach pierwszorzędne znaczenie
praktyczne. Sposób sterowania sil-
nikiem skokowym z kontrolą czasu
trwania poszczególnych skoków wir-
nika wymaga zastosowania bardziej
skomplikowanego komutatora elek-
tronicznego. Problem ten może być
jednak stosunkowo prosto rozwiąza-
ny przy zastosowaniu techniki DSP
(
digital signal processing
).
Rys. 3 a) Przebiegi momentu silnika, prędkości i drogi jego wirnika dla czterech zadanych skoków w przypadku „sztywnego” taktowa-
nia impulsów zasilających fazy b) w przypadku zoptymalizowanych momentów przełączania faz
a
(droga k
ątowa)
M
śr
-M
M
śr
a
+M
M
m
-M
+M
W
W
m
t [ms]
0
10
20
30
40
50
60
0
10
20
30
40
50
60
położenia pozycyjne
0
10
20
30
40
50
60
W
1,5 W
m
a
a
0
10
20
30
40
50
60
t [ms]
t [ms]
t [ms]
b)
a)
nr skoku (komutacji)
nr skoku (komutacji)
Wyszukiwarka
Podobne podstrony:
ei 2004 07 08 s039
ei 2004 07 08 s040
ei 2004 07 08 s058
ei 2004 07 08 s030
ei 2004 07 08 s005
ei 2004 07 08 s065
ei 2004 07 08 s019
ei 2004 07 08 s052
ei 2004 07 08 s061
ei 2004 07 08 s034
ei 2004 07 08 s047
ei 2004 07 08 s056
ei 2004 07 08 s078
ei 2004 07 08 s043
ei 2004 07 08 s072
ei 2004 07 08 s003
ei 2004 07 08 s024
ei 2004 07 08 s004
ei 2004 07 08 s068
więcej podobnych podstron